1. Introduction
Multilevel inverter (MLI) topologies are interesting for several applications, ranging from medium- and high-power levels, because of their improved efficiency and quality of the output voltage compared to typical two-level inverters [
1,
2,
3]. The three basic MLI topologies presented in the literature are the “flying capacitor multilevel inverter”, “diode clamped multilevel inverter”, and “cascaded H-bridge multilevel inverter” (CHBMLI). While the two first topologies use additional capacitors and power semiconductors in the structure of the inverter, the CHBMLI produces the output voltage from the series connection of two or more single-phase H-bridge inverters, with the possibility to use multiple DC input sources with equal or different values [
4,
5,
6,
7]. The addition of more steps to the output voltage reduces the total harmonic distortion (THD) and the need for high-frequency commutation, therefore reducing the switching losses of the power semiconductors [
1,
8,
9].
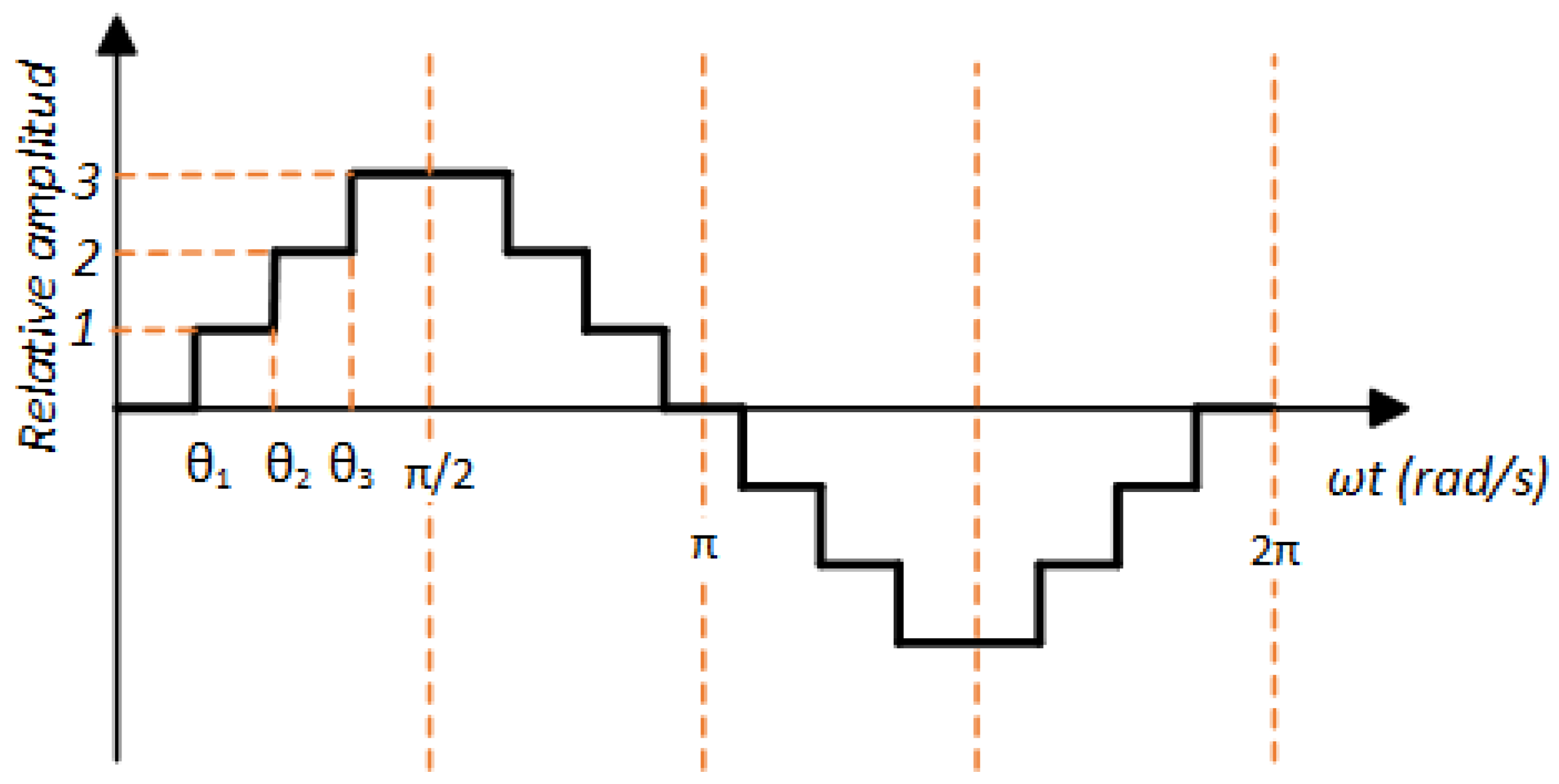
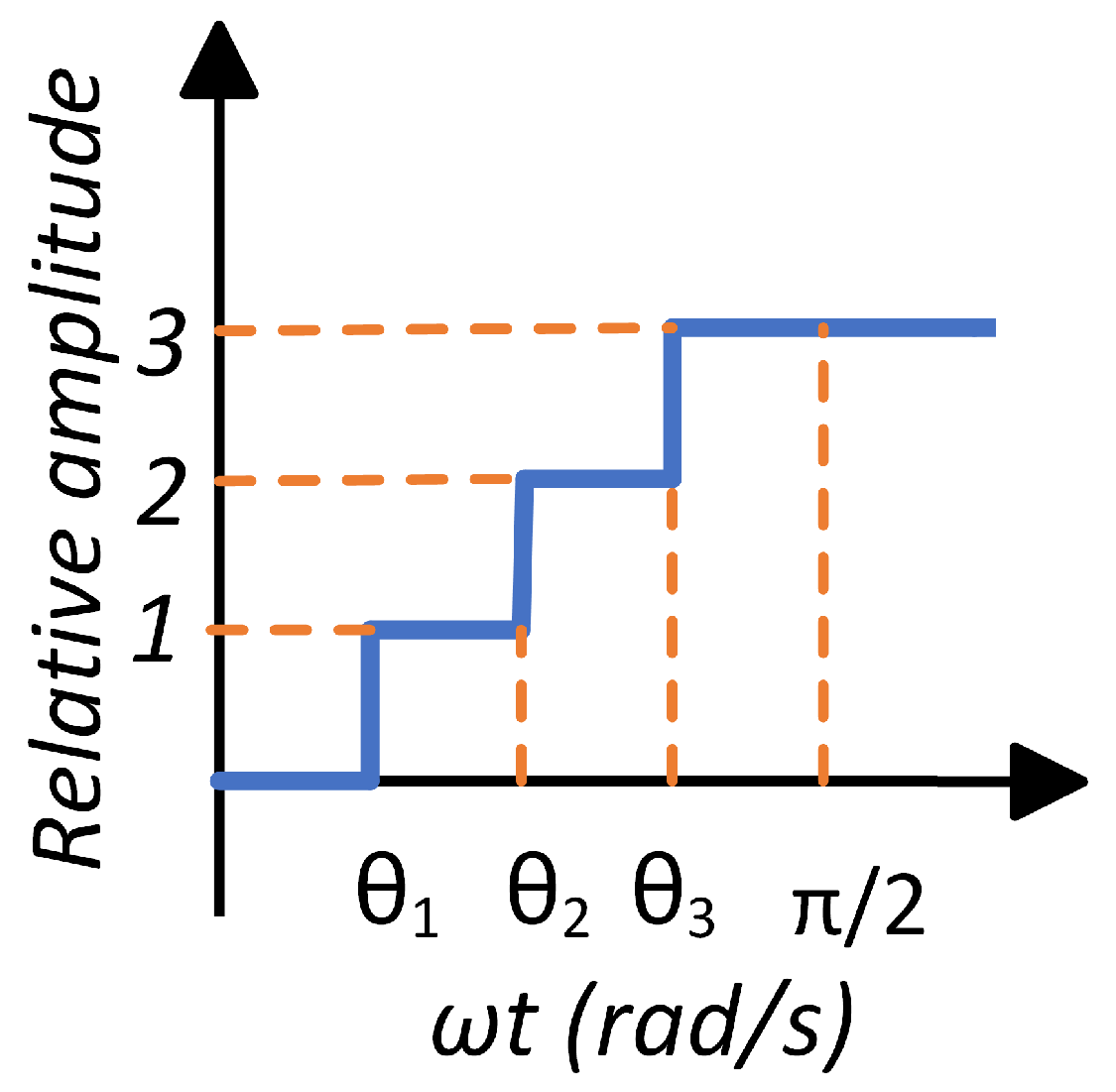
Recent control proposals mainly involve pulse width modulation (PWM) to enforce a desired behavior in the current waveform. The PWM modulation uses a higher frequency and focuses on control and efficiency. However, the objective control inside an MLI can be made without using PWM by creating a stepped output voltage with steps of uniform amplitude, minimizing the THD. This purpose can be achieved by using appropriate angles to switch the inverter semiconductors (switching sequences) at low frequencies. Low-frequency switching in power converters achieves shallow switching losses, and the power losses are mainly due to conduction losses, which can be reduced by selecting suitable power semiconductors. These converters can then achieve higher device utilization, higher efficiency, and lower cooling requirements [
10]. Examples of low-frequency switching applications are found in photovoltaic inverters [
11] and medium-voltage and high-power applications, such as in medium-voltage AC drives [
10], where switching losses dominate. The output voltage of the low-frequency switching converter has more harmonics than common pulse width modulation or other higher-switching-frequency strategies. This is why multilevel inverters are recommended in low-frequency switching to improve the THD of the voltage waveforms. However, obtaining the angles that ensure minimum harmonic distortion is essential, which is the contribution of this work through the Taguchi method applied to the genetic algorithm. These optimal angles, in turn, achieve a smaller filter size for low-frequency switching applications [
9,
12,
13].
Among the methodologies used to obtain the appropriate switching sequences, the genetic algorithm (GA) has shown considerable improvements in the THD [
14,
15,
16]. The GA is usually implemented on a solver included in the MATLAB software in which the obtained THD can vary from one run to another [
14,
17]. This behavior occurs because the GA solver on MATLAB contains too many options, and the standard method of choosing the GA solver parameters is trial and error, as well as the user experience. This problem opens the question of obtaining the minimum possible THD with this method.
The Taguchi method developed by Genechi Taguchi is an efficient design of experiment technique (DOE) used to solve various problems. For example, in ref. [
18], the Taguchi method was used to optimize the green sand-casting process parameters; in ref. [
19], the authors analyzed various aluminum alloy die-casting methods, while in ref. [
20], a self-designed electric vehicle controller incorporated a thermal simulation model for the PCB, along with using the Taguchi method to enhance the component layout on the PCB. In contrast, in ref. [
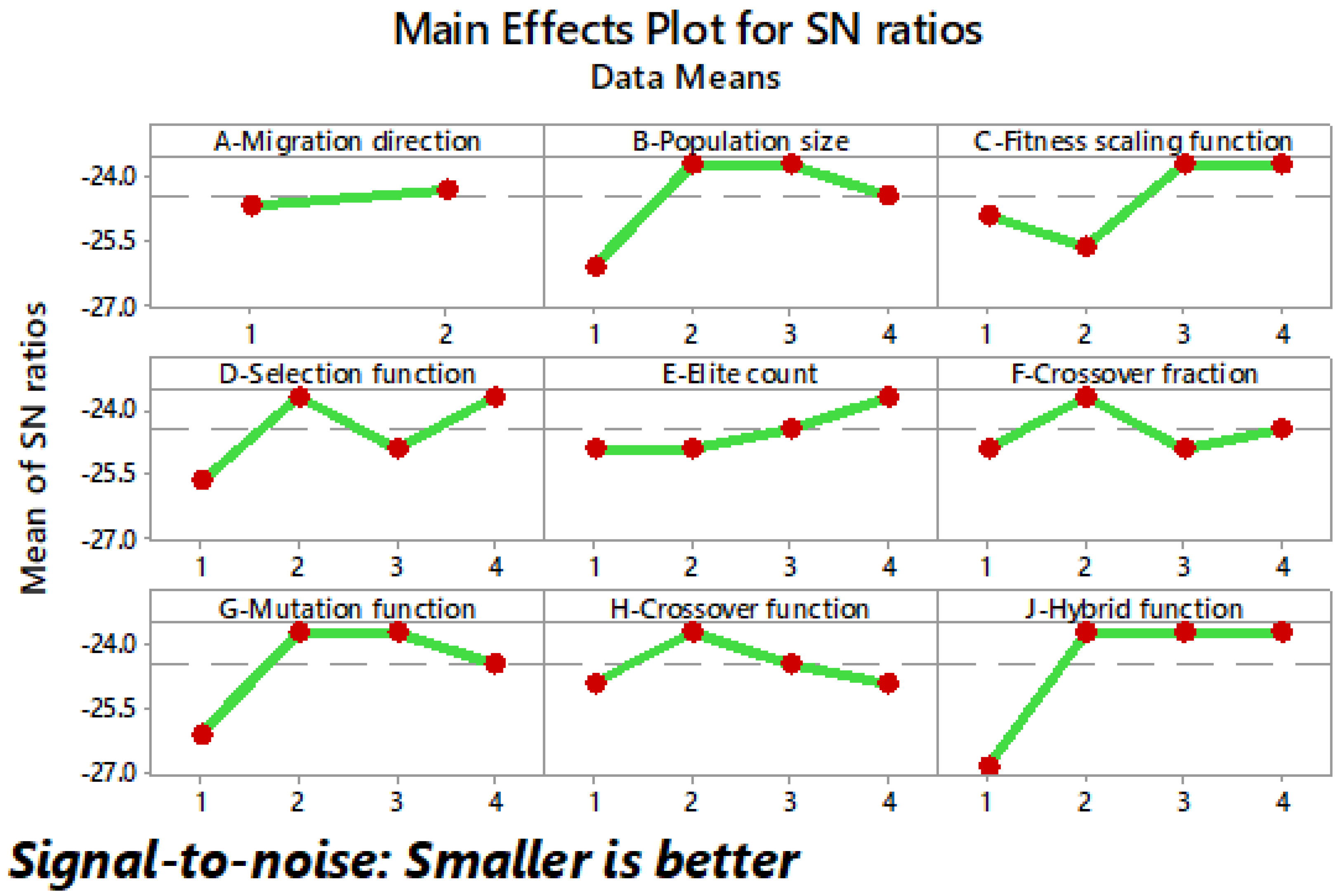
21], this method is used to design a piston-forging process, to mention a few works. However, the authors could not find the Taguchi method implementation in power electronics in the literature review. In this paper, using the Taguchi method, the GA solver parameter obtention leads to a low THD, which is the objective function.
This method is applied to determine the optimal parameters with few experimental runs, which are achieved using a particular set of predefined arrays called orthogonal arrays (OA). The appropriate OAs are selected according to the number of factors and their levels used in the experiment. These OAs give complete information on all the factors that affect the performance parameters [
21,
22,
23].
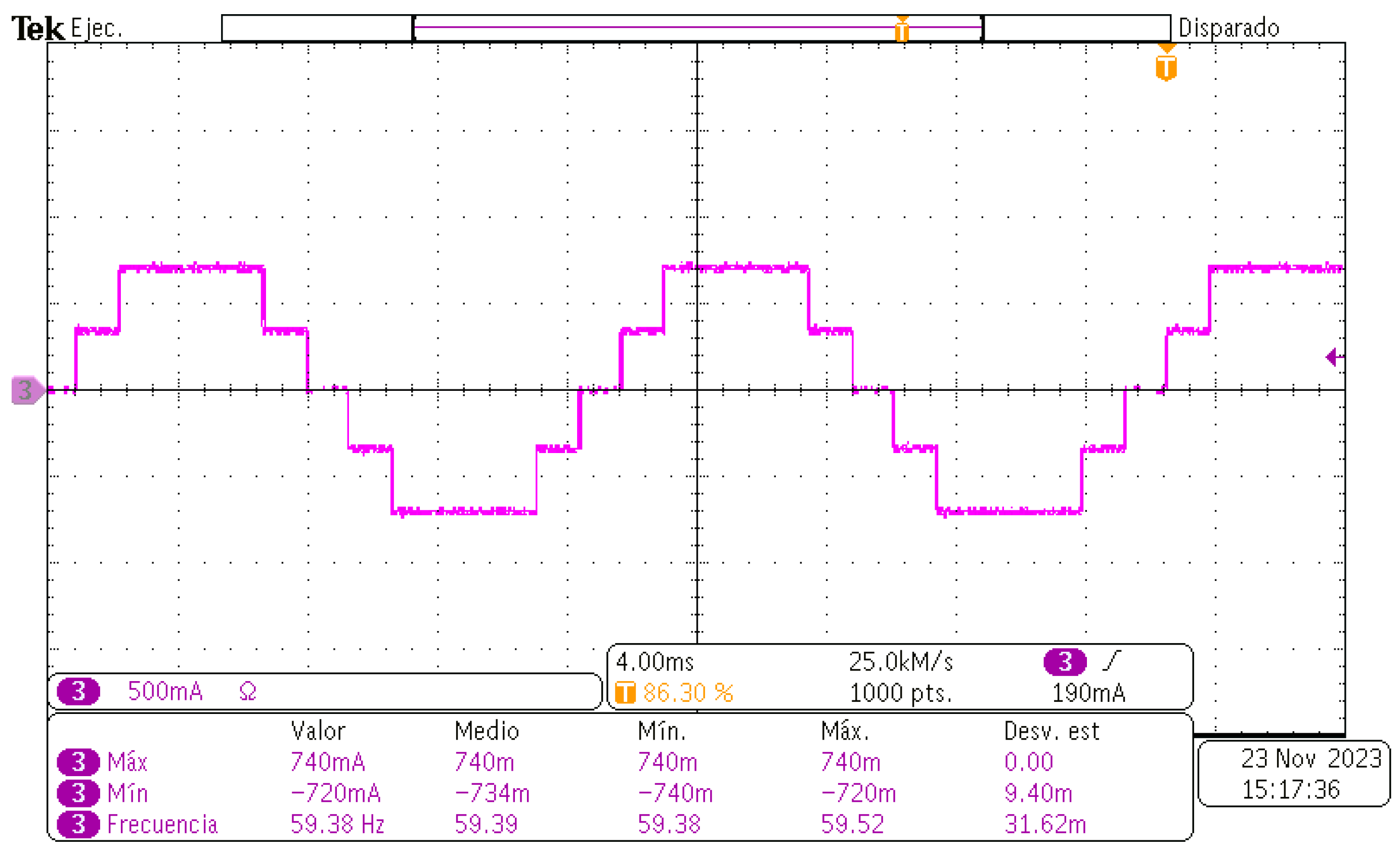
This work aims to optimize the Matlab GA solver parameters through the Taguchi method. Experimentation with a CHBMLI laboratory prototype of five and seven levels proves the performance of this proposal. The resulting THD is compared to other papers that use the same objective function.
The following section introduces the conceptual background of the output voltage signal produced by the CHBMLI, the GA main aspects, and the Taguchi method and its implementation.
Section 3 shows the experimental results with the laboratory prototype, while
Section 4 compares the obtained results with some results reported in the literature. Finally, the conclusions of this paper are displayed in
Section 5.
4. Discussion
As previously stated, GA parameters are commonly chosen by trial and error, which may not guarantee the lowest THD value. Due to the above, and to verify the effectiveness of implementing the Taguchi method, the value of the THD obtained in this paper was compared to some other papers presented in the literature that use the same objective function (shown in (
3)) and the same algorithm (GA).
Table 9 shows the THD comparison of the five-level CHBMLI, while
Table 10 shows the THD comparison of the seven-level CHBMLI.
In ref. [
14], the authors show the obtained THD value by simulation for the five- and seven-level CHBMLI. A table with the used parameters for the GA is given; however, there is no explanation of how these parameters were chosen.
The authors of [
35] use the exact MATLAB GA solver that is used in this paper; however, the authors do not state how the GA parameters were chosen. This THD value reported in this paper was lower in both cases, and the results were obtained experimentally.
It is essential to mention that for the comparison, only articles where the harmonic spectrum reached the 49th harmonic were considered. Some articles were found where the same objective function was considered, but the range of the harmonic spectrum differed from that in this paper. For example, in ref. [
15], it is considered up to the 40th harmonic, while in ref. [
36] it is considered up to the 100th harmonic. Due to the above, these articles were not considered since it would be impossible to compare this paper correctly.
5. Conclusions
This paper highlights the determination of optimal switching angles for both five- and seven-level CHBMLI to minimize the THD in the output voltage waveform. The switching angles were calculated using the MATLAB GA solver. Instead of relying on the traditional trial-and-error or user experience approach to configuring the solver parameters, this study employed the Taguchi method, providing a more systematic and efficient parameter tuning.
These determined switching angles were subsequently applied to a CHBMLI laboratory prototype, and THD measurements were conducted for the five- and seven-level configurations. A comparison was made between the experimental THD values and their theoretical counterparts, revealing a maximum deviation of only .
In addition, the study compares these optimized switching angles and experimental THD values with data from the existing literature that utilized the same objective function and harmonic spectrum. Remarkably, the results demonstrate that the Taguchi method leads to lower THD values in five- and seven-level CHBMLIs than previously reported results. This observation highlights the potential of the Taguchi method for application in other optimization techniques, such as particle swarm optimization (PSO) and the artificial bee colony (ABC) algorithm, among others.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}