
Rotor Asymmetry Detection in Wound Rotor Induction Motor Using Kalman Filter Variants and Investigations on Their Robustness: An Experimental Implementation

Abstract
:1. Introduction
- Analytically calculating parameters for the real-time mathematical model of a WRIM through standardized tests.
- Rotor asymmetry fault resulting from changes in Rr also affects the motor’s speed. Therefore, both Rr and speed are estimated using various variants of Kalman filters (EKF, UKF, DEKF, DUKF). The developed Kalman filters for state estimation are applied to real-time data, tested, and validated through filter convergence using the kurtosis method.
- Qualitative analysis of the robustness of different filter variants is conducted by performing state estimation on real-time data under both healthy and asymmetric conditions. The estimation is carried out with consistent initial conditions and different initial conditions.
- A significant contribution of this work lies in the parameter sensitivity analysis used to minimize the probability of false alarms.
2. Materials and Methods
2.1. Mathematical Modelling of WRIM
- No-load test: The motor is run through this test at its rated voltage without any load. The purpose of this test is to determine the magnetizing inductance (Lm). By applying the rated voltage Vo, corresponding current Io and the power Wo is noted, the value of Lm is calculated using the following formula.
- 2.
- Blocked rotor test: The blocked rotor test is conducted to understand the performance of an induction motor when it is operating under full load conditions, similar to the short-circuit test. The objective of this test is to ascertain the values of stator inductance (Ls), rotor inductance (Lr), and rotor resistance (Rr). By applying the rated current (Isc) and recording the corresponding voltage (Vsc) and power (Wsc), the values of Ls, Lr, and Rr are calculated using the following formulas.
- 3.
- DC resistance test: By applying a DC voltage across two motor terminals and measuring the resulting current, it is possible to determine the stator resistance (Rs).
2.2. Methodology
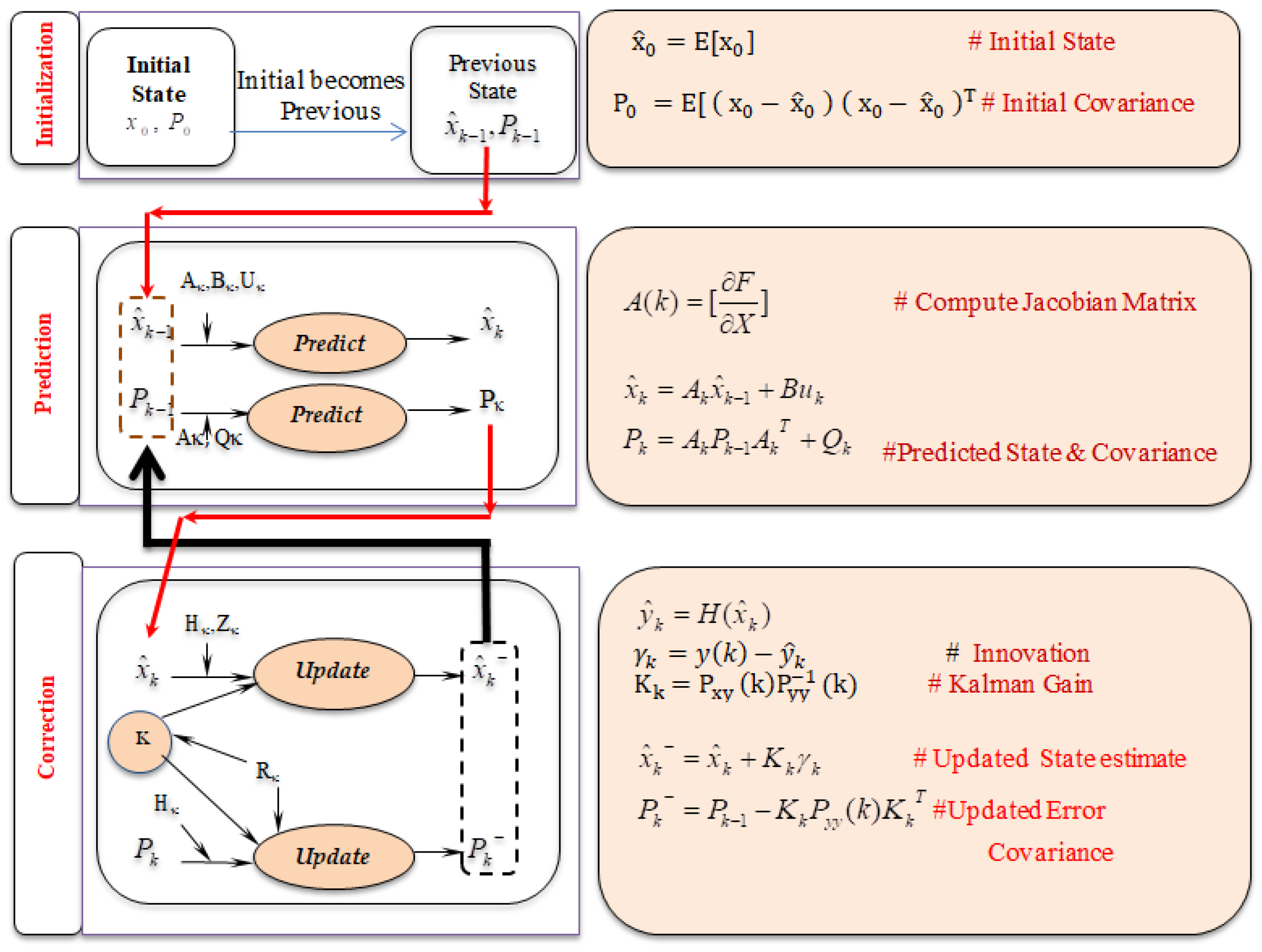
2.2.1. Extended Kalman Filter
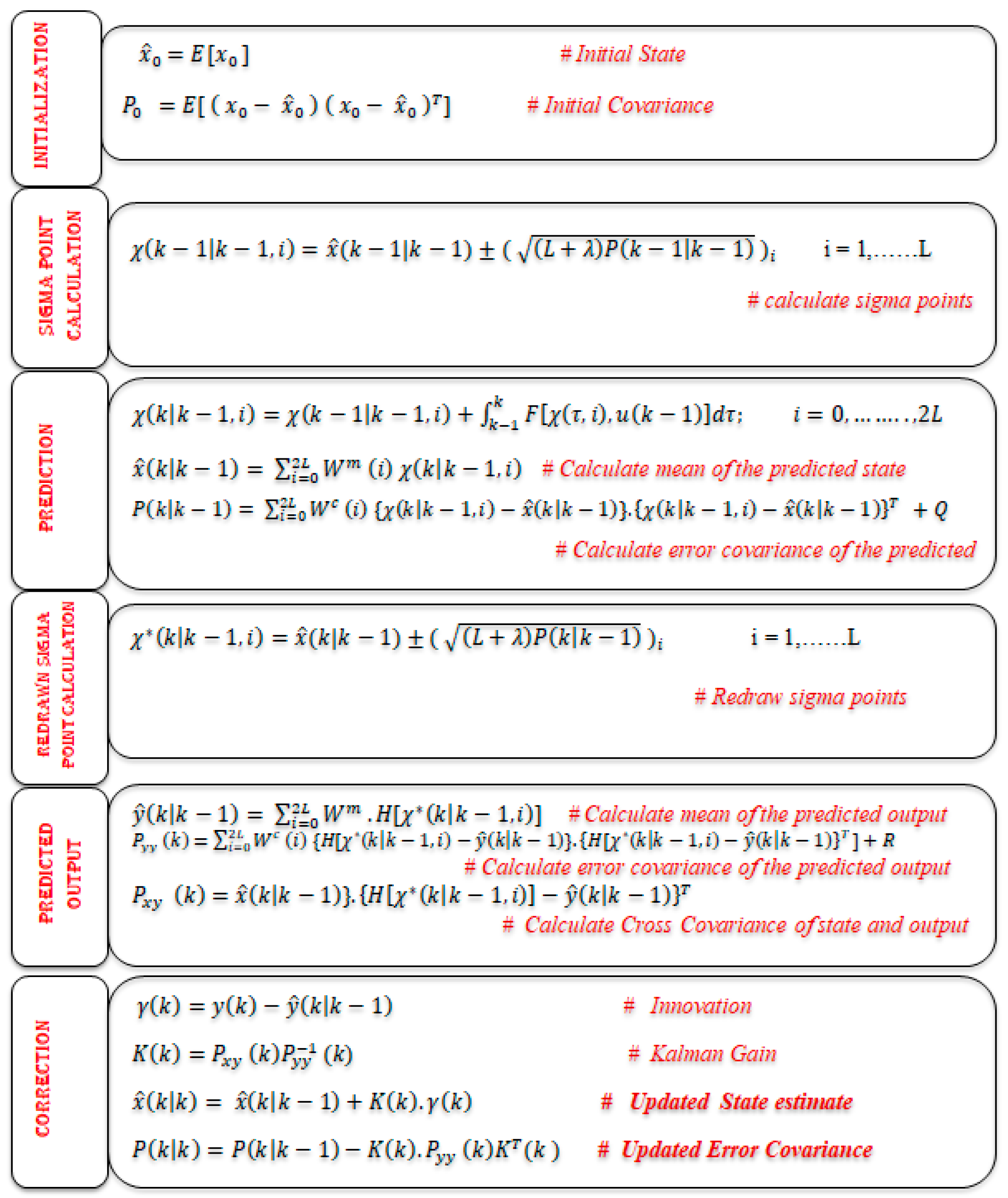
2.2.2. Unscented Kalman Filter
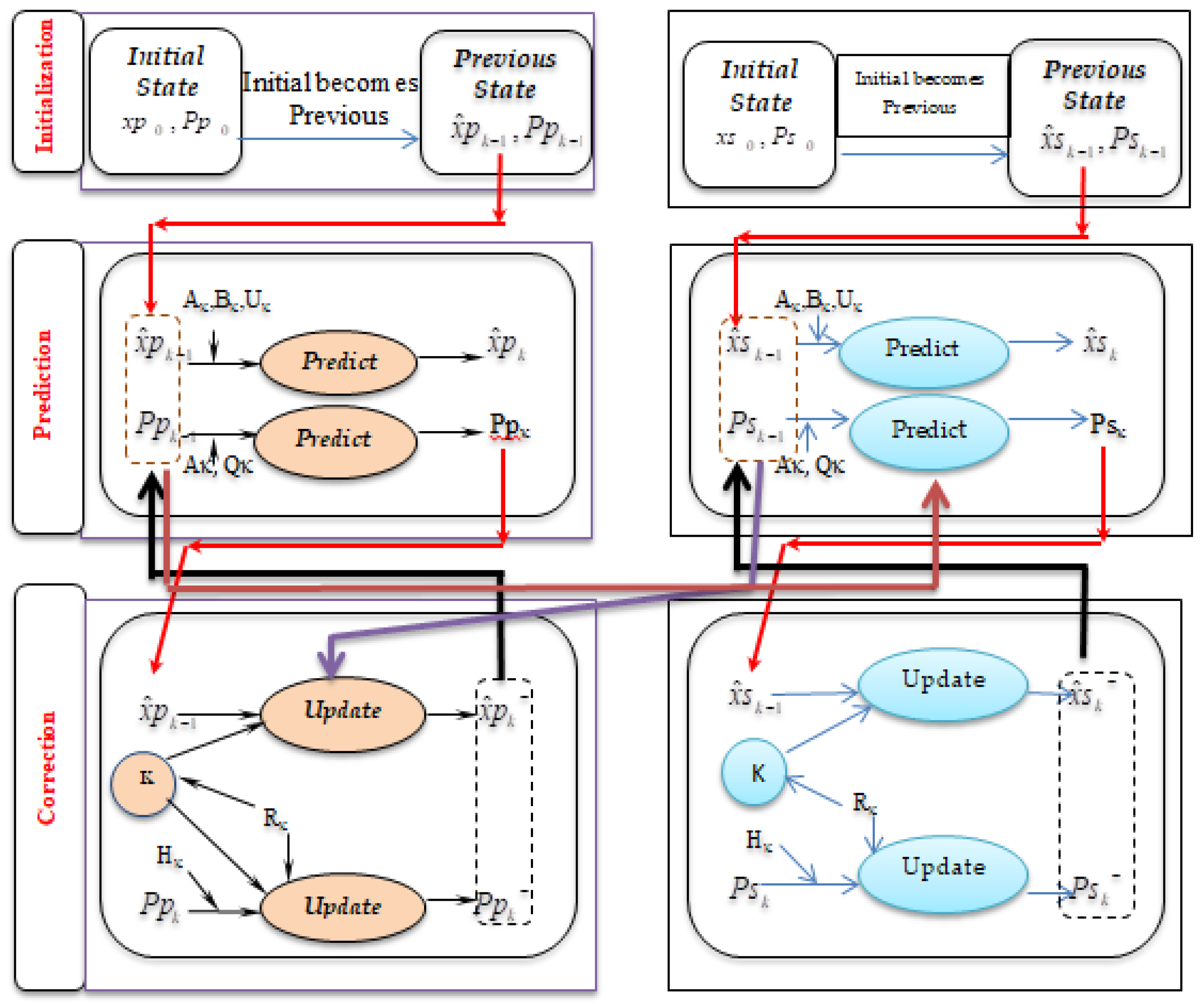
2.2.3. Dual Extended Kalman Filter
| Parameter Prediction: | State Prediction: |
| Parameter Update: | State Update: |
2.2.4. Dual Unscented Kalman Filter
| Parameter Prediction: | State Prediction: |
| Parameter Update: | State Update: |
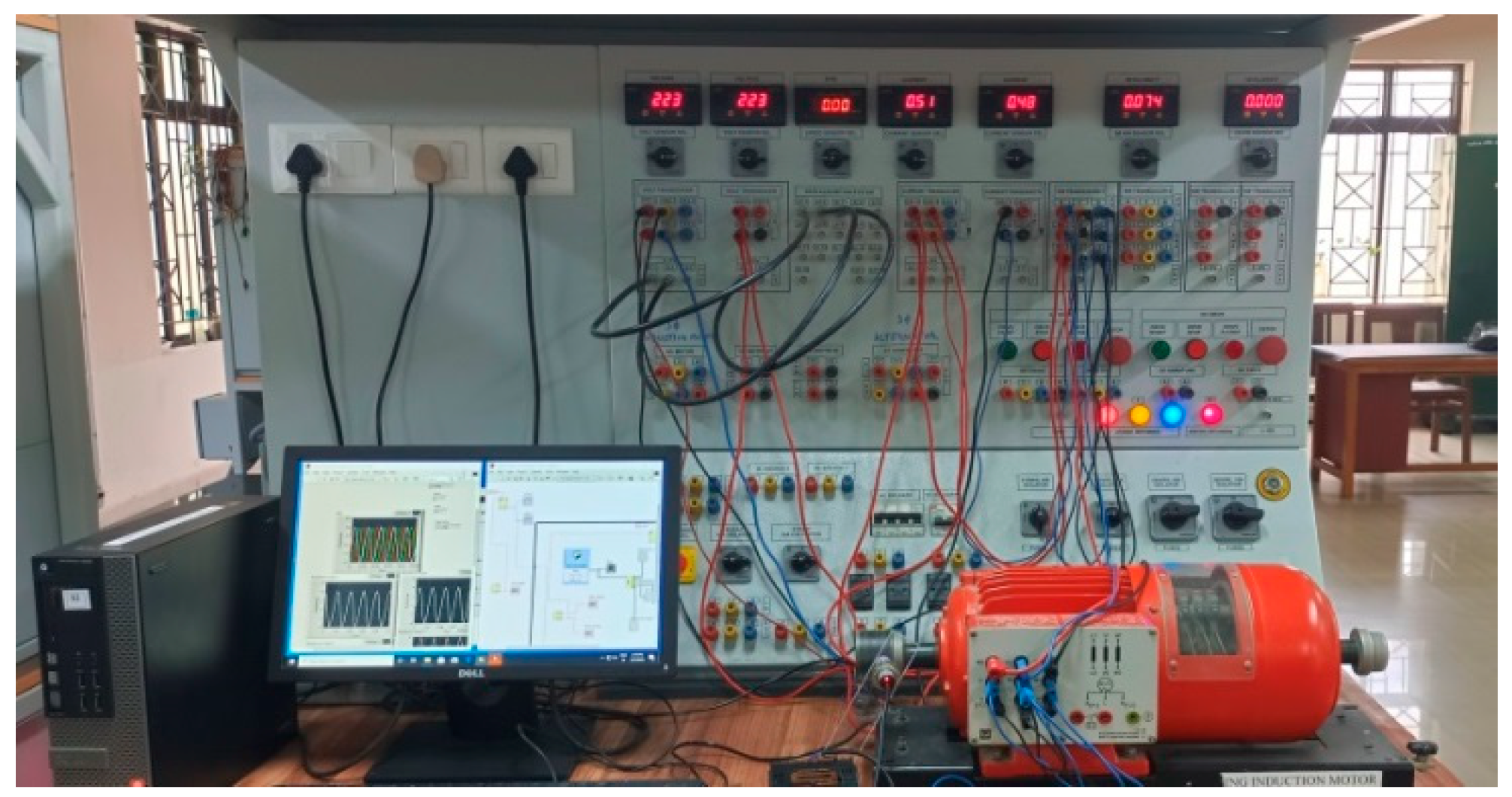
2.2.5. Real-Time Experimental Setup
3. Results and Discussion
- State estimation
- State estimation with different initial conditions
- Analytical solution of the model
- Parameter sensitivity analysis
- Kurtosis
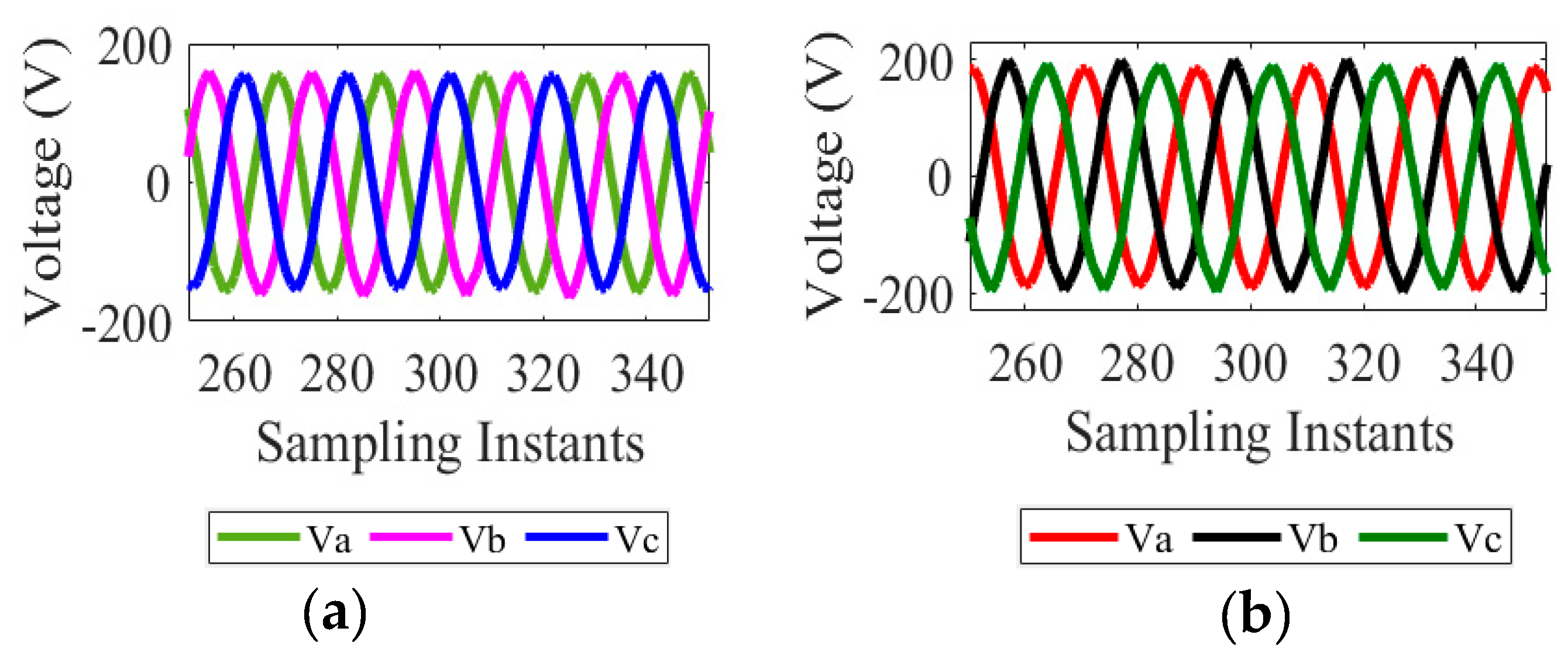
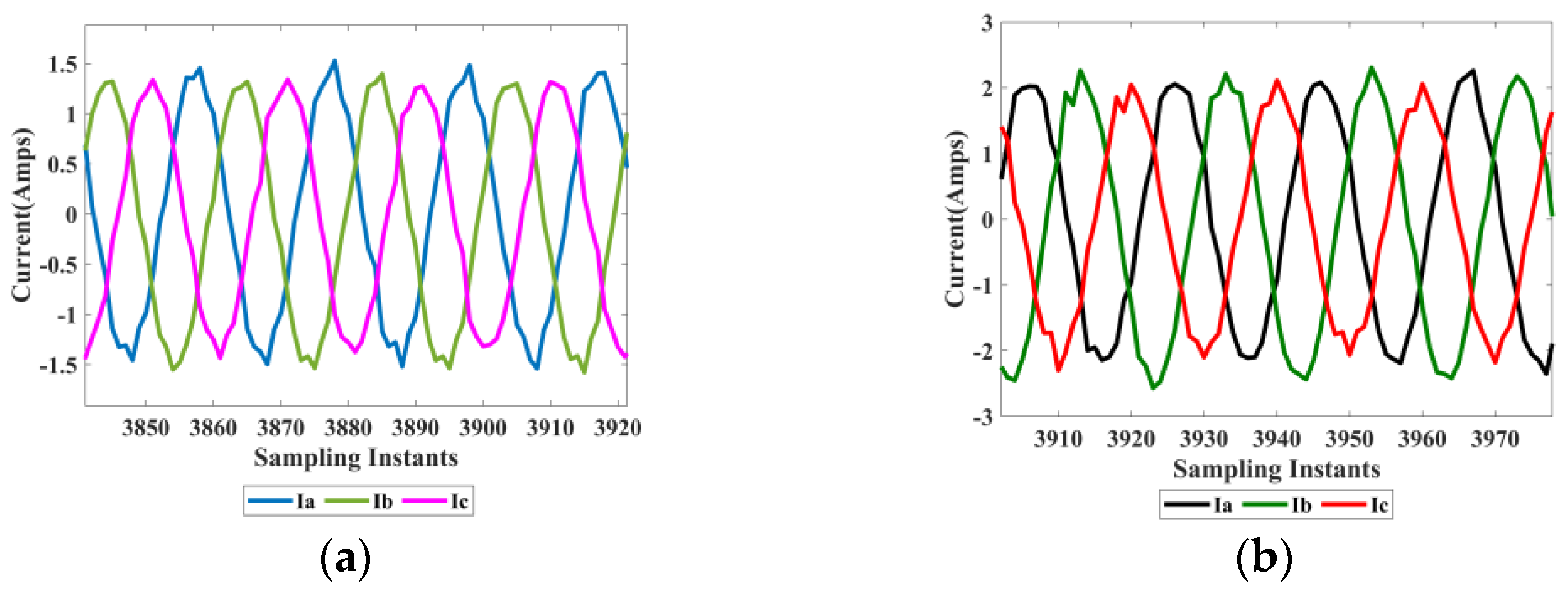
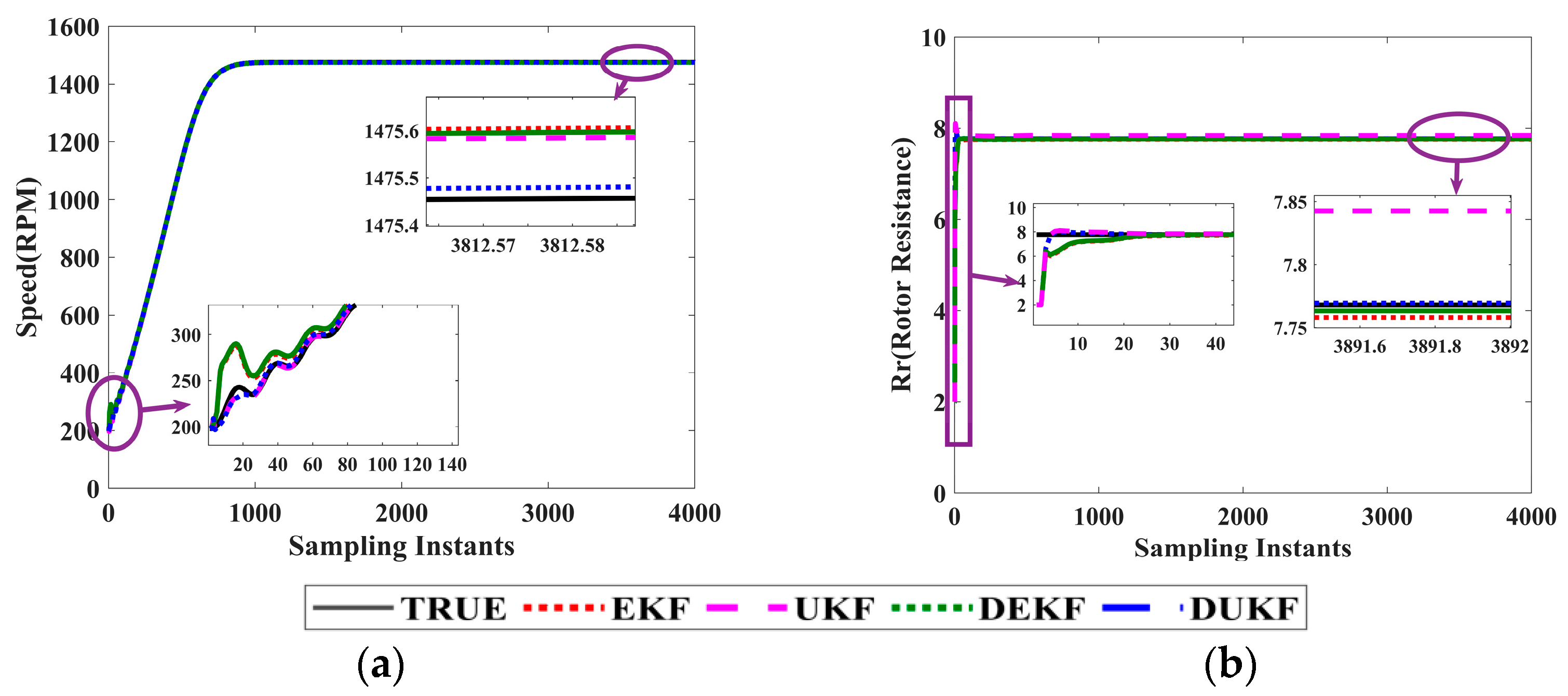
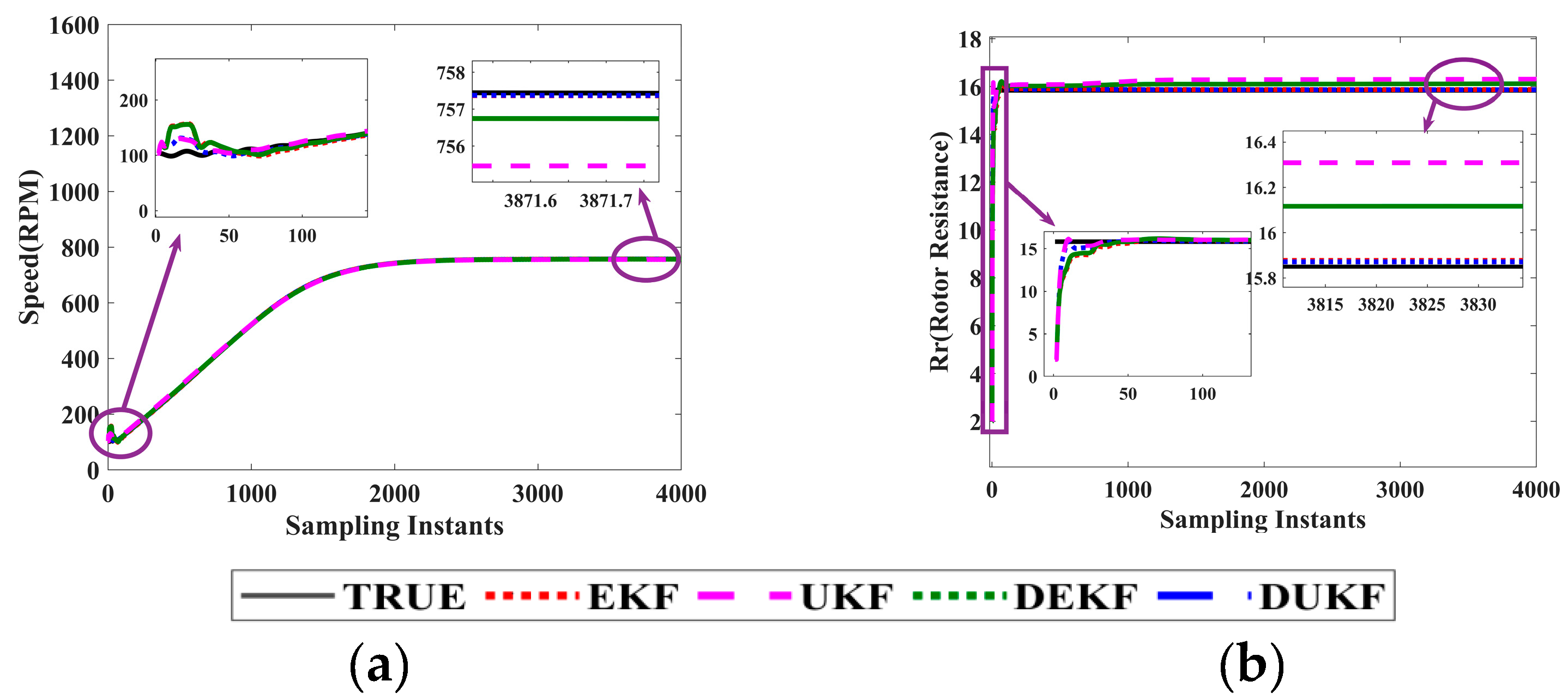
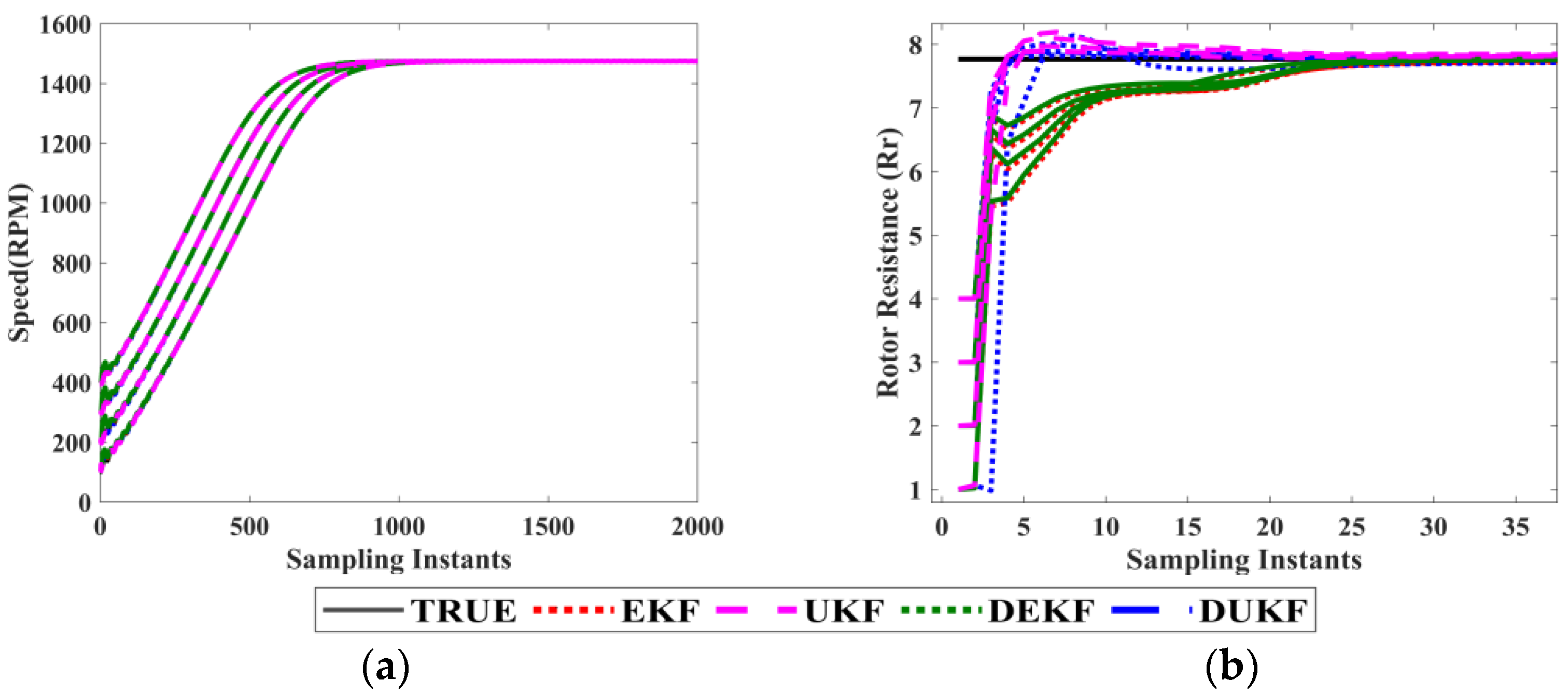
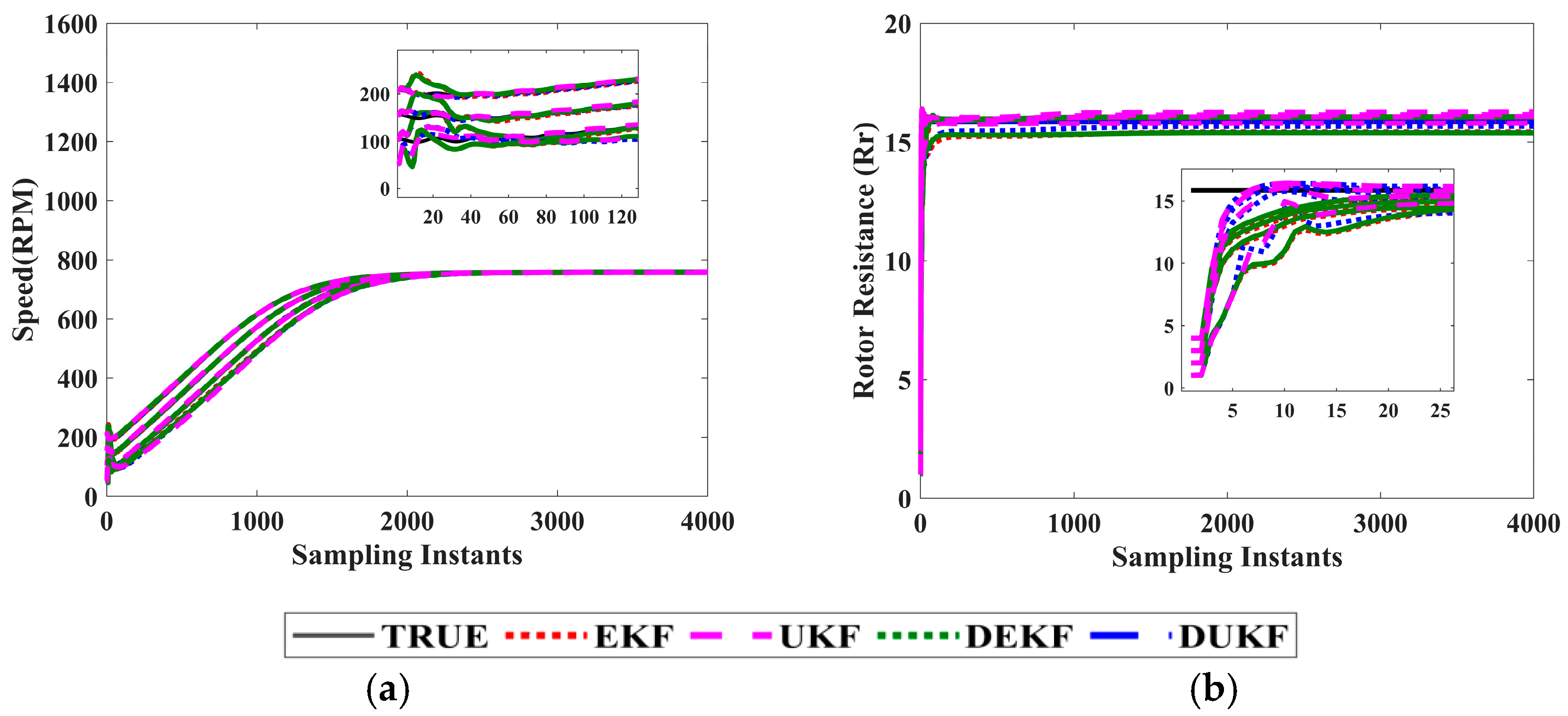
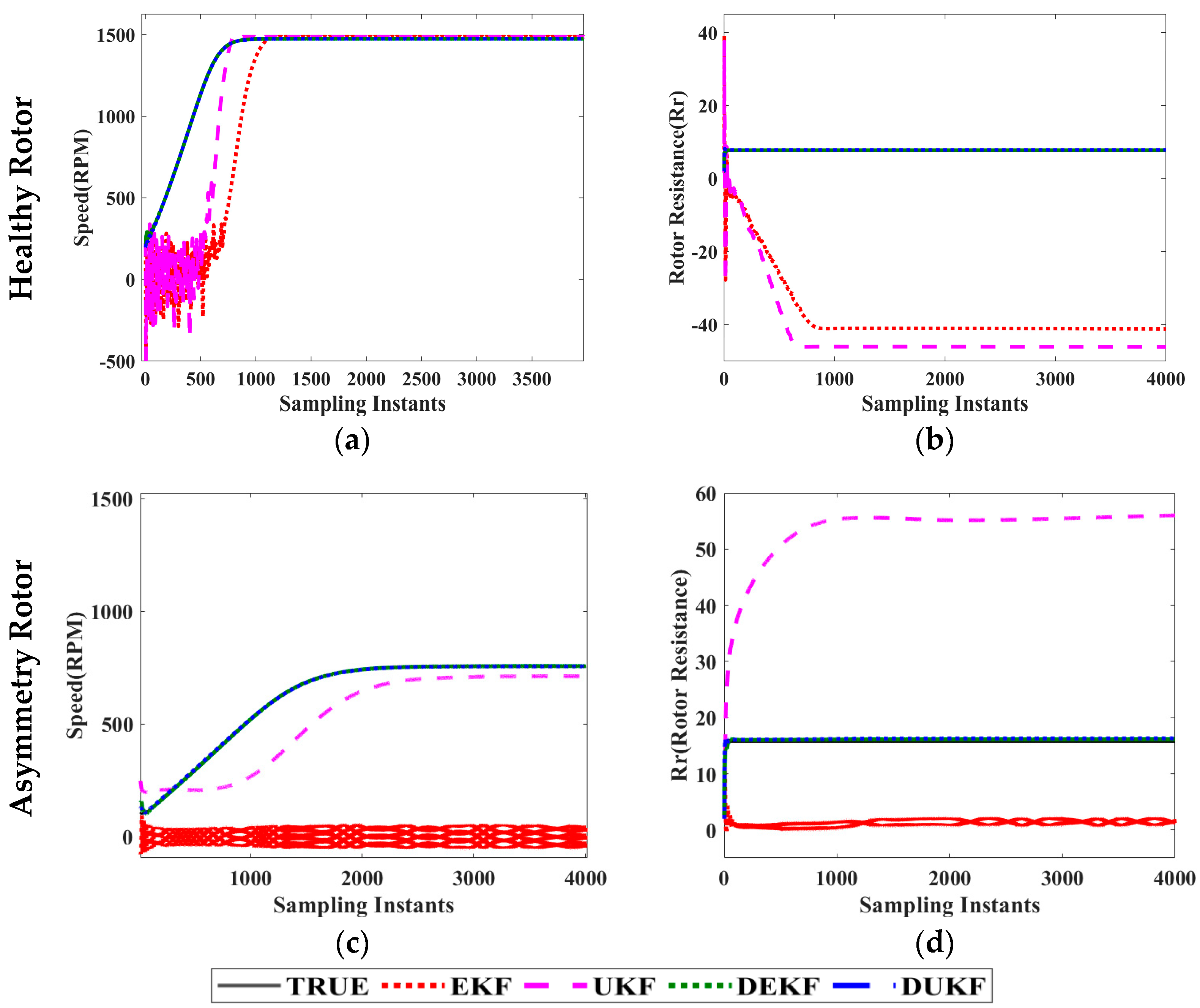
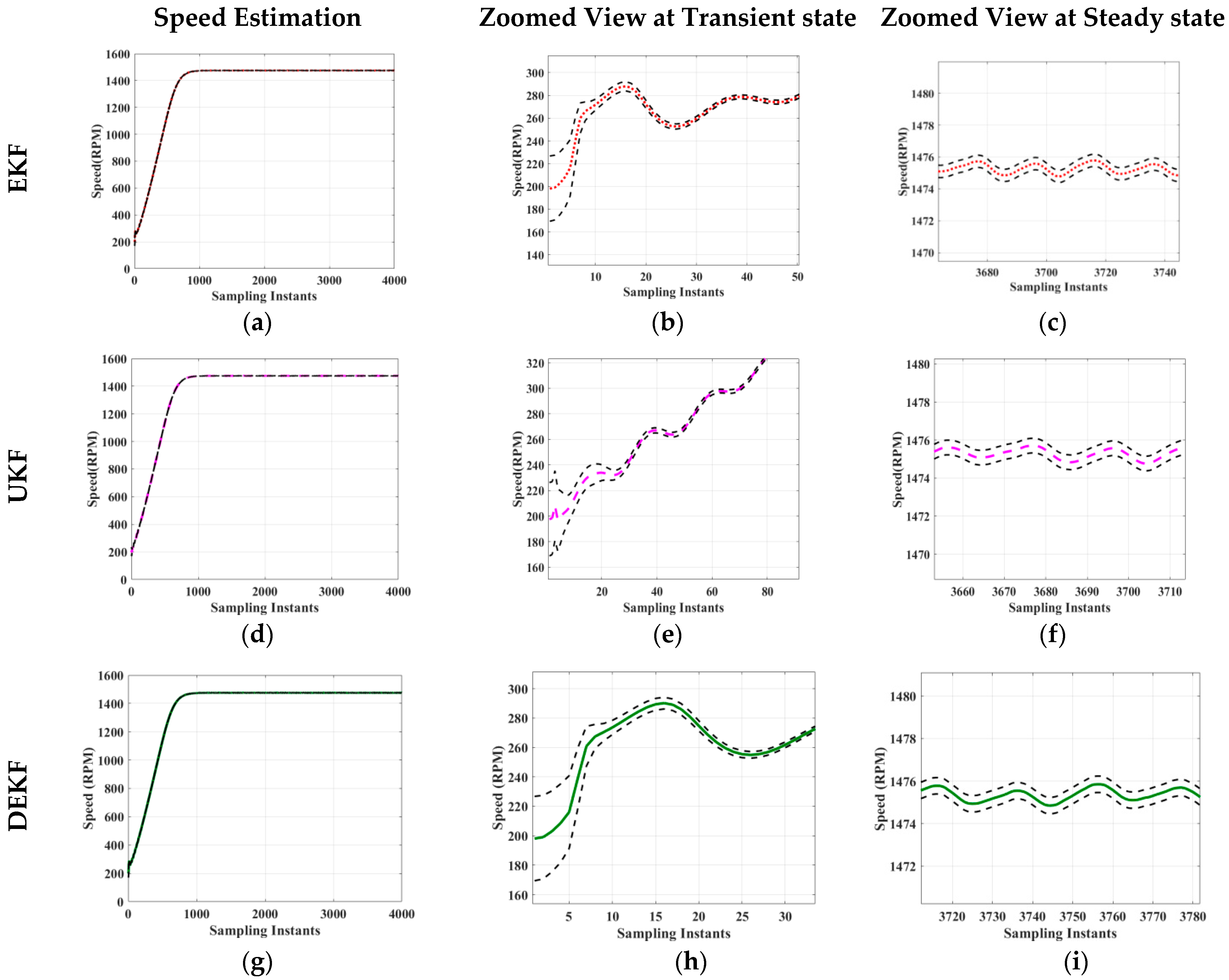
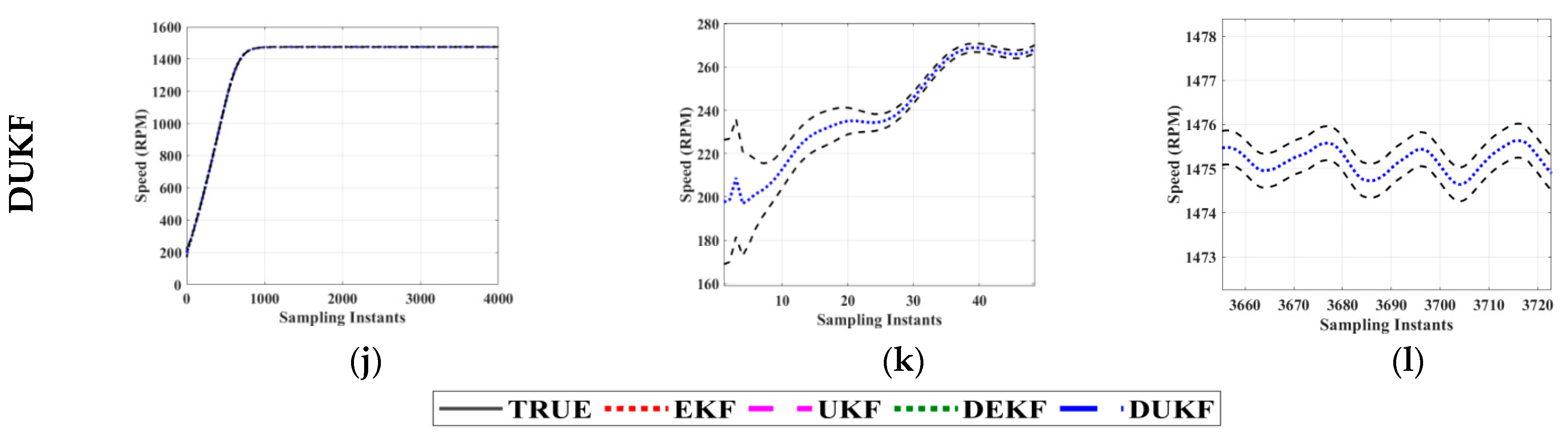
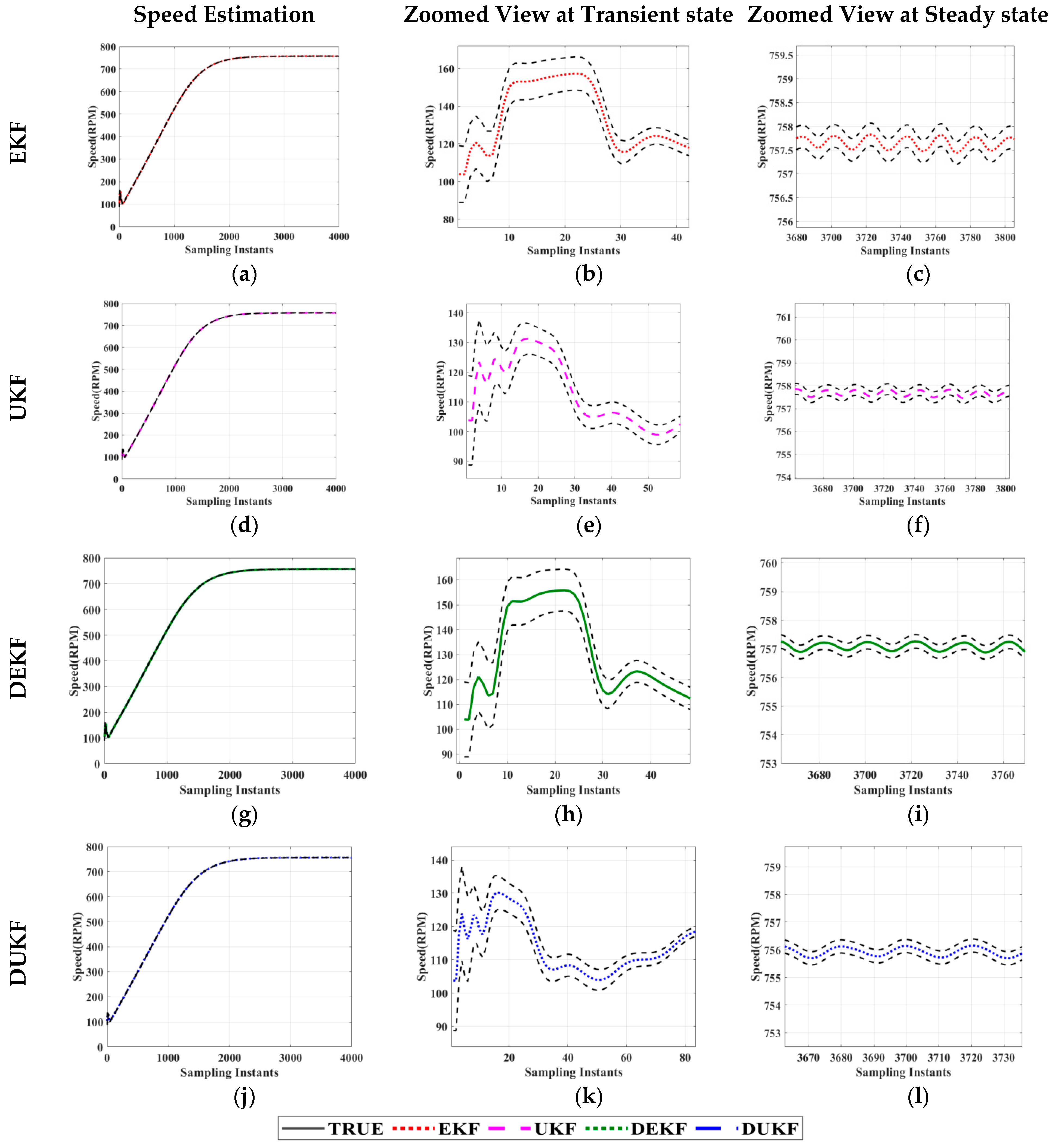
3.1. State Estimation
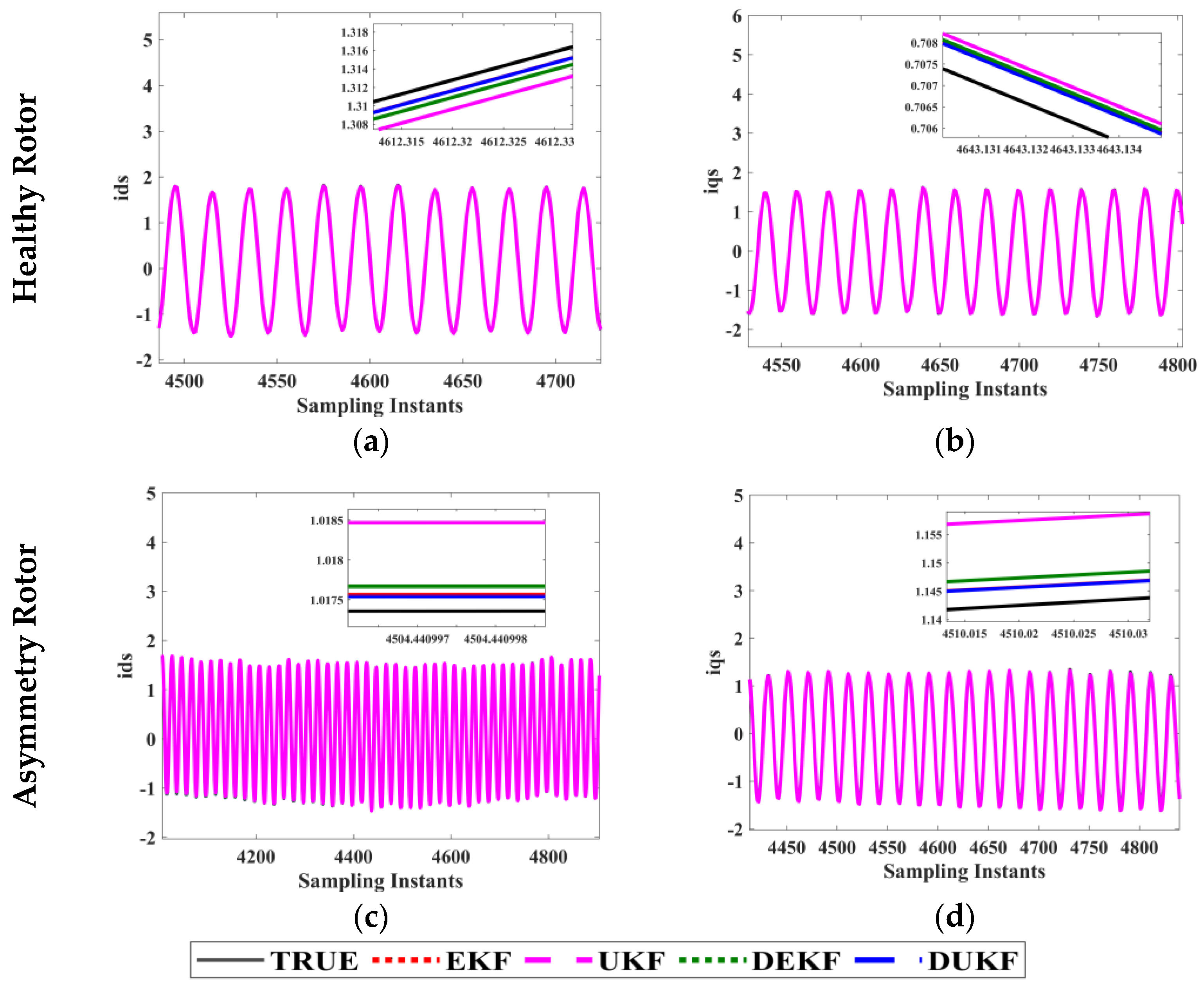
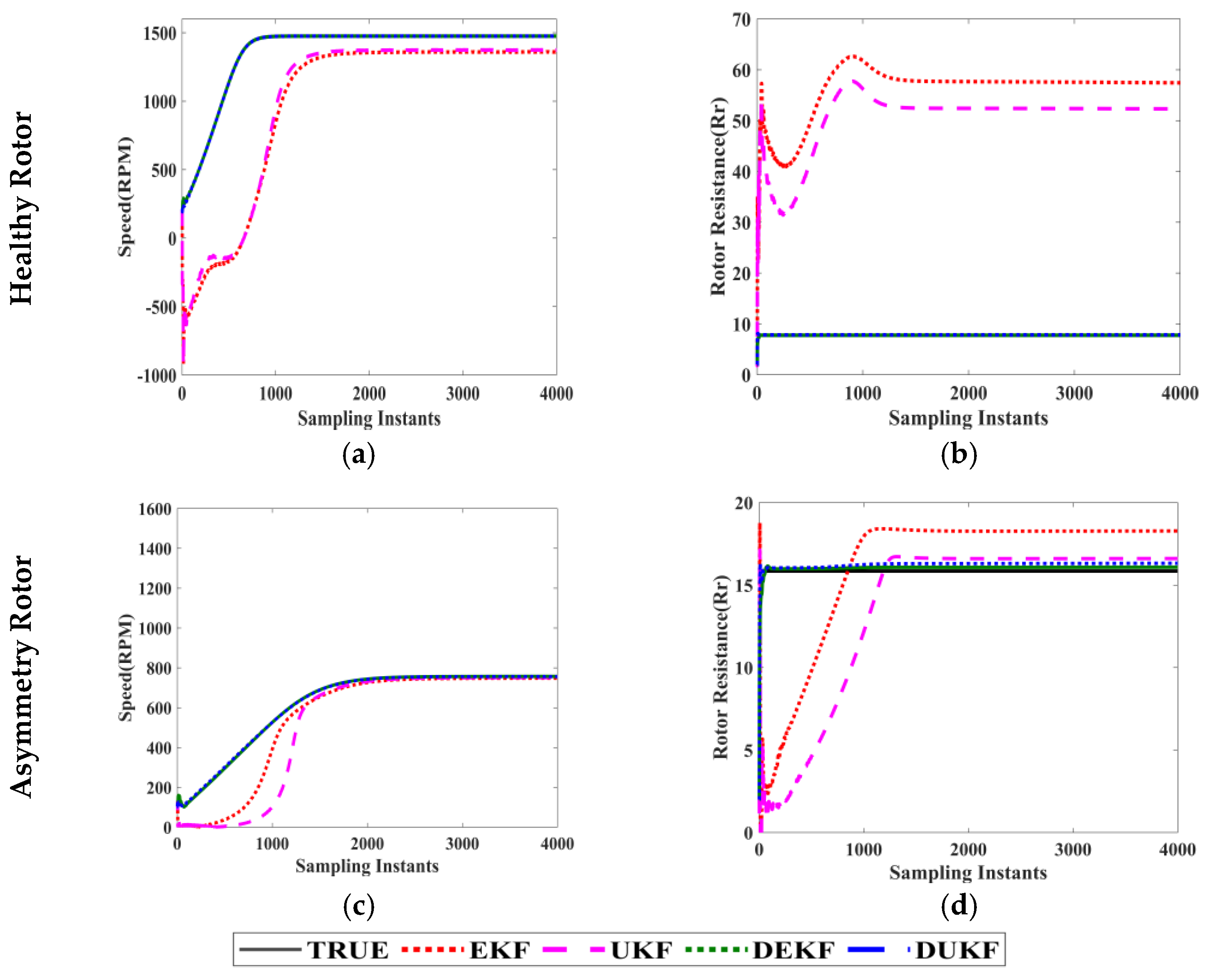
3.2. State Estimation with Different Initial Conditions
- Based on the acquired voltage and current data and the estimation of both states for both the healthy and asymmetry rotor, it is inferred that DUKF is robust and outperforms all other filter estimates.
- All filter estimates remain consistent across various initial conditions.
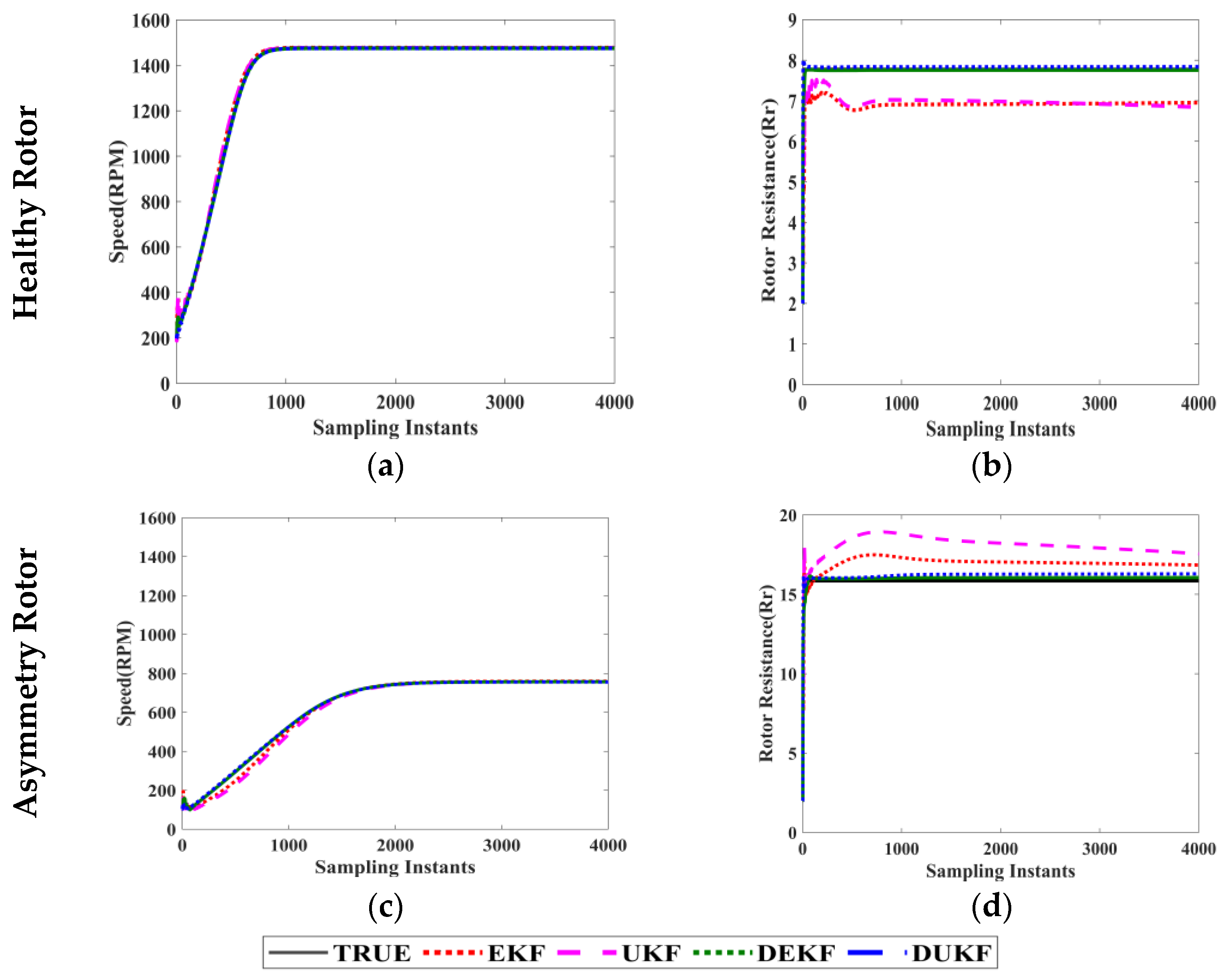
3.3. Analytical Solution
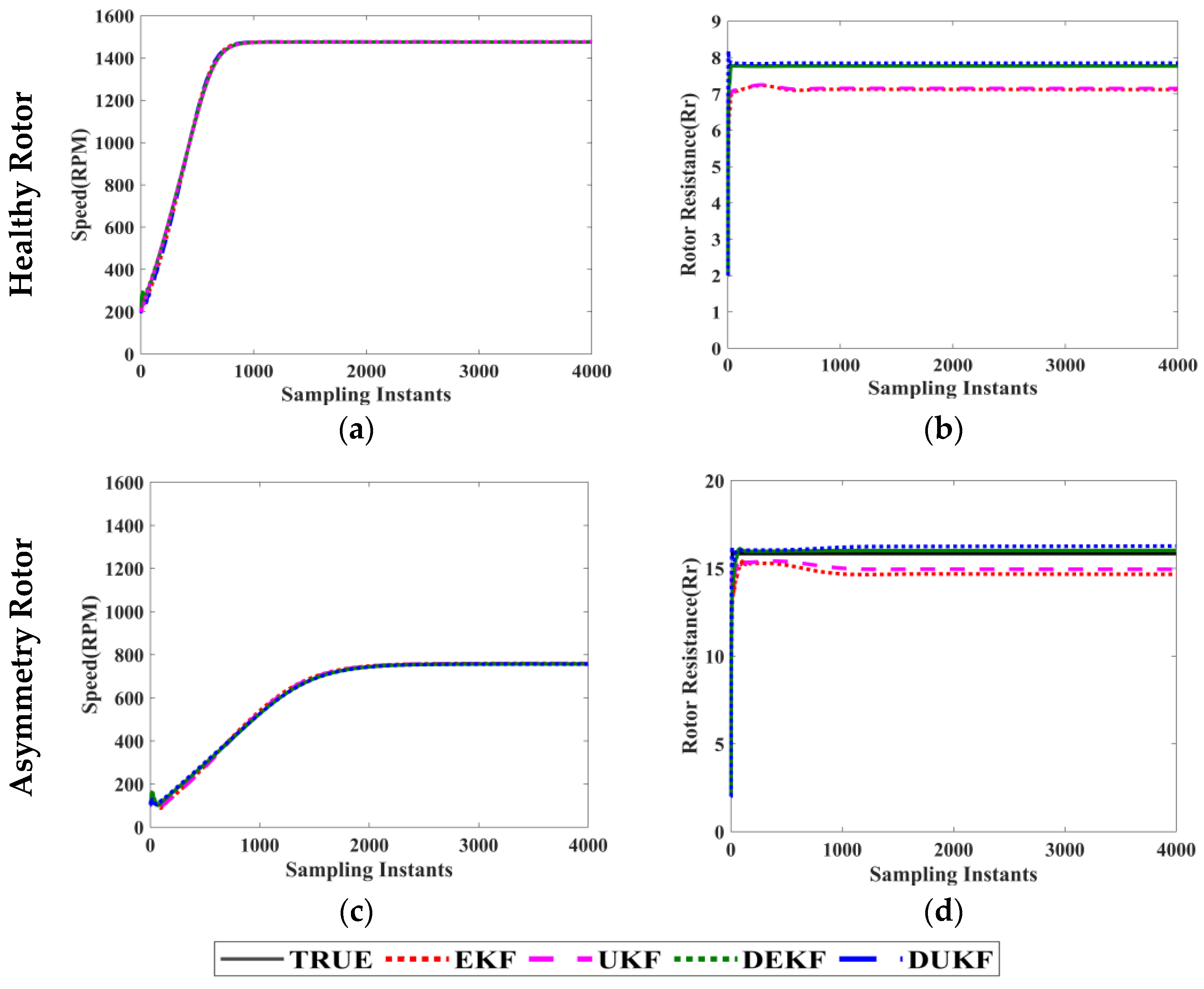
3.4. Parameter Sensitivity Analysis
- From Table 6, an observed low bias in the filter estimates occurs when the parameter Rs is mismatched. A medium bias is present in the filter estimate when the parameter Lm is mismatched, and the estimates exhibit a high bias when Ls and Lr are mismatched. Therefore, the stator resistance has low sensitivity, the mutual inductance has medium sensitivity, and stator and rotor inductances are highly sensitive to the state estimation.
- Even in the presence of parameter mismatches, dual filters remain robust in estimating speed and rotor resistance.
- Since dual filters offer a slightly biased estimate, they are proposed as effective soft sensors for reducing false alarms.
3.5. Kurtosis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| WRIM | Wound Rotor Induction Motor |
| SCIM | Squirrel Cage Induction Motor |
| DFIG | Doubly Fed Induction Generator |
| EKF | Extended Kalman Filter |
| UKF | Unscented Kalman Filter |
| DEKF | Dual Extended Kalman Filter |
| DUKF | Dual Unscented Kalman Filter |
| RAF | Rotor Asymmetry Fault |
| SAF | Stator Asymmetry Fault |
| FDD | Fault Detection and Diagnosis |
| MCSA | Motor Current Signature Analysis |
| IDFT | Iterative localized Discrete Fourier Transform |
| CWT | Continuous Wavelet Transform |
| SCSVM | Stator Current Space Vector Magnitude |
| IMSC | Instantaneous Magnitude of the Stator Current |
| Rs | Stator Resistance |
| Rr | Rotor Resistance |
| Ls | Stator Inductance |
| Lr | Rotor Inductance |
| Lm | Mutual Inductance |
References
- Bebars, A.D.; Eladl, A.A.; Abdulsalam, G.M.; Badran, E.A. Internal electrical fault detection techniques in DFIG-based wind turbines: A review. Prot. Control Mod. Power Syst. 2022, 7, 18. [Google Scholar] [CrossRef]
- Ameid, T.; Menacer, A.; Talhaoui, H.; Harzelli, I. Rotor resistance estimation using Extended Kalman filter and spectral analysis for rotor bar fault diagnosis of sensorless vector control induction motor. Measurement 2017, 111, 243–259. [Google Scholar] [CrossRef]
- Ferrucho-Alvarez, R.E.; Martinez-Herrera, A.L.; Cabal-Yepez, E.; Rodriguez-Donate, C.; Lopez-Ramirez, M.; Mata-Chavez, R.I. Broken rotor bar detection in induction motors through contrast estimation. Sensors 2021, 21, 7446. [Google Scholar] [CrossRef] [PubMed]
- Farzaneh, K.; Poshtan, J.; Poshtan, M. Detection of broken rotor bars in induction motors using nonlinear Kalman filters. ISA Trans. 2010, 49, 189–195. [Google Scholar]
- Yetgin, A.G. Effects of induction motor end ring faults on motor performance. Experimental results. Eng. Fail. Anal. 2019, 96, 374–383. [Google Scholar] [CrossRef]
- Kia, S.H. Detection of Stator and Rotor Asymmetries Faults in Wound Rotor Induction Machines: Modeling, Test and Real-Time Implementation. In Emerging Electric Machines-Advances, Perspectives and Applications; IntechOpen: London, UK, 2021. [Google Scholar]
- Vedreño-Santos; Francisco; Riera-Guasp, M.; Henao, H.; Pineda-Sánchez, M.; Puche-Panadero, R. Diagnosis of rotor and stator asymmetries in wound-rotor induction machines under nonstationary operation through the instantaneous frequency. IEEE Trans. Ind. Electron. 2013, 61, 4947–4959. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Antonino-Daviu, J.A.; Osornio-Rios, R.A.; de Jesus Romero-Troncoso, R.; Razik, H. Detection of winding asymmetries in wound-rotor induction motors via transient analysis of the external magnetic field. IEEE Trans. Ind. Electron. 2019, 67, 5050–5059. [Google Scholar] [CrossRef]
- Bolognani, S.; Peretti, L.; Zigliotto, M. Parameter Sensitivity Analysis of an Improved Open-Loop Speed Estimate for Induction Motor Drives. IEEE Trans. Power Electron. 2008, 23, 2127–2135. [Google Scholar] [CrossRef]
- IEEE Standard 493–1997; IEEE Recommended Practice for the Design of Reliable Industrial and Commercial Power Systems (Gold Book). IEEE: Piscataway, NJ, USA, 1998.
- Toliyat, H.A.; Kliman, G.B. (Eds.) Handbook of Electric Motors; CRC Press: Boca Raton, FL, USA, 2018; Volume 120. [Google Scholar]
- Climente-Alarcon, V.; Riera-Guasp, M.; Antonino-Daviu, J.; Roger-Folch, J.; Vedreno-Santos, F. Diagnosis of rotor asymmetries in wound rotor induction generators operating under varying load conditions via the Wigner-Ville Distribution. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 19–22 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1378–1383. [Google Scholar]
- Kia, S.H. Monitoring of wound rotor induction machines by means of discrete wavelet transform. Electr. Power Compon. Syst. 2018, 46, 2021–2035. [Google Scholar] [CrossRef]
- Khalaf, I.R.; Watson, S.J.; Djurović, S.; Crabtree, C.J. An effective approach for rotor electrical asymmetry detection in wind turbine DFIGs. IEEE Trans. Ind. Electron. 2018, 65, 8872–8881. [Google Scholar]
- Marzebali, M.H.; Abolghasemi, V.; Ferdowsi, S.; Bazghandi, R. Manipulation of stator current signature for rotor asymmetries fault diagnosis of wound rotor induction machine. IET Sci. Meas. Technol. 2022, 16, 523–532. [Google Scholar] [CrossRef]
- Zhale, H.; Rahideh, A. Rotor electrical fault detection of wind turbine induction generators using an unscented Kalman filter. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 979–988. [Google Scholar]
- Said, M.S.N.; Benbouzid, M.; Benchaib, A. Detection of broken bars in induction motors using an extended Kalman filter for rotor resistance sensorless estimation. IEEE Trans. Energy Convers. 2000, 15, 66–70. [Google Scholar] [CrossRef]
- Kumar, S.; Prakash, J.; Kanagasabapathy, P. A critical evaluation and experimental verification of Extended Kalman Filter, Unscented Kalman Filter and Neural State Filter for state estimation of three phase induction motor. Appl. Soft Comput. 2011, 11, 3199–3208. [Google Scholar] [CrossRef]
- Murat, B.; Bogosyan, S.; Gokasan, M. Speed-sensorless estimation for induction motors using extended Kalman filters. IEEE Trans. Ind. Electron. 2007, 54, 272–280. [Google Scholar]
- Krishnan, R. Electrical Motor Drive; Prantice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Van Der Merwe, R.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing (Cat. No. 01CH37221), Salt Lake City, UT, USA, 7–11 May 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 6, pp. 3461–3464. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power (KW) | Voltage (V) | Current (A) | Frequency (Hz) | Power Factor | Speed (RPM) |
|---|---|---|---|---|---|
| 1.0 | 220/380 | 4.32/2.5 | 50 | 0.82 | 1385 |
| Case | Rs (Ω) | Rr (Ω) | Ls (H) | Lr (H) | Lm (H) |
|---|---|---|---|---|---|
| Healthy | 8.8 | 7.768 | 0.863 | 0.863 | 0.831 |
| Asymmetry | 8.8 | 15.8501 | 0.4613 | 0.4613 | 0.4042 |
| Q = (5.3) × 10−5; (4.82) × 10−5; (1.5) × 10−6; (1.5) × 10−6; 155 × 10−7; 1 × 10−4; 8 × 10−6 |
| R = (5.3) × 10−5; (4.82) × 10−5 |
| α = 0.1, β = 2, κ = −3 |
| STATES | TRUE | EKF | UKF | DEKF | DUKF |
|---|---|---|---|---|---|
| SPEED | 1475.45 | 1475.6 | 1475.59 | 1475.595 | 1475.48 |
| Rr | 7.768 | 7.758 | 7.842 | 7.7635 | 7.7695 |
| STATES | TRUE | EKF | UKF | DEKF | DUKF |
|---|---|---|---|---|---|
| SPEED | 757.78 | 757.77 | 756 | 757.15 | 757.781 |
| Rr | 15.85 | 15.88 | 16.3 | 16.1 | 15.87 |
| Cases | Healthy Rotor | Asymmetry Rotor | ||
|---|---|---|---|---|
| Speed | Rr | Speed | Rr | |
| 10% increase in Rs | 1.14 | 0.72 | 2.51 | 1.55 |
| 10% decrease in Ls and Lr | 9.95 | 37.354 | 44.5 | 40.6 |
| 10% decrease in Lm | 115.27 | 50.237 | 8.55 | 2.05 |
| 10% increase in Rs and 10% decrease in Ls, Lr, Lm | 2.72 | 1.01 | 3.3 | 1.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
John Basha, F.; Somasundaram, K. Rotor Asymmetry Detection in Wound Rotor Induction Motor Using Kalman Filter Variants and Investigations on Their Robustness: An Experimental Implementation. Machines 2023, 11, 910. https://doi.org/10.3390/machines11090910
John Basha F, Somasundaram K. Rotor Asymmetry Detection in Wound Rotor Induction Motor Using Kalman Filter Variants and Investigations on Their Robustness: An Experimental Implementation. Machines. 2023; 11(9):910. https://doi.org/10.3390/machines11090910
Chicago/Turabian StyleJohn Basha, Furzana, and Kumar Somasundaram. 2023. "Rotor Asymmetry Detection in Wound Rotor Induction Motor Using Kalman Filter Variants and Investigations on Their Robustness: An Experimental Implementation" Machines 11, no. 9: 910. https://doi.org/10.3390/machines11090910
APA StyleJohn Basha, F., & Somasundaram, K. (2023). Rotor Asymmetry Detection in Wound Rotor Induction Motor Using Kalman Filter Variants and Investigations on Their Robustness: An Experimental Implementation. Machines, 11(9), 910. https://doi.org/10.3390/machines11090910