


Design and Optimization of Hydropneumatic Suspension Simulation Test Bench with Electro-Hydraulic Proportional Control


Abstract
:1. Introduction
2. Simulation Test Bench
2.1. Functional and Performance Parameters
2.2. Mechanical Platform
2.3. Hydraulic Loading System
2.4. Parameter Calculation and Selection of Key Components
2.4.1. Hydraulic Cylinder
2.4.2. Hydraulic Pump
2.4.3. Electro-Hydraulic Proportional Valve
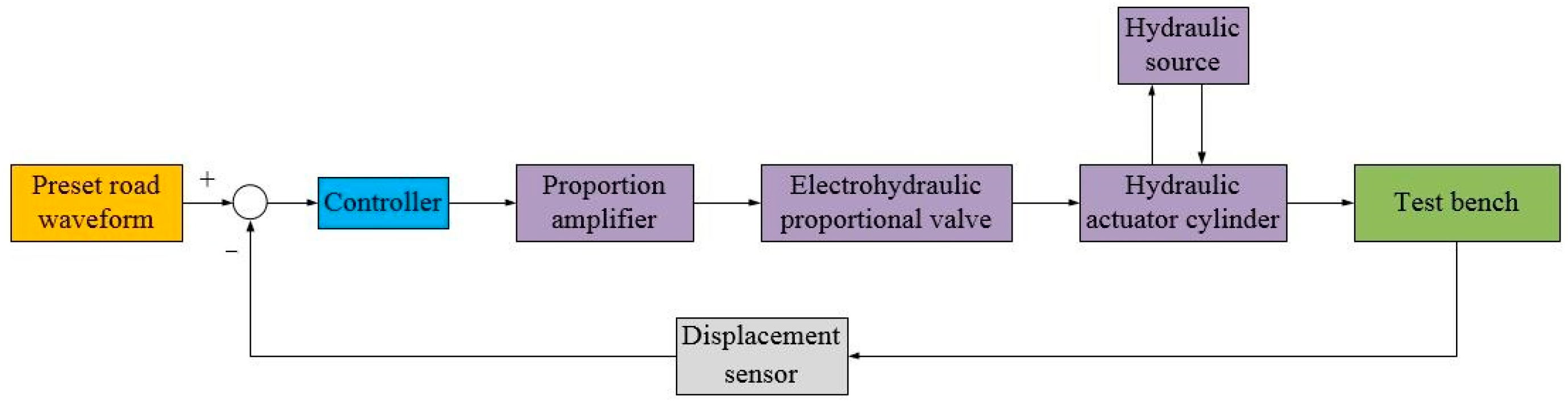
3. Electro-Hydraulic Proportional Control System
3.1. System Composition and Working Principle
3.2. Proportional Amplifier
3.3. Electro-Hydraulic Proportional Directional Control Valve
3.4. Hydraulic Cylinder
3.4.1. Linear Flow Equation
3.4.2. Flow Continuity Equation
3.4.3. Load Equilibrium Equation
3.4.4. Output Displacement Equation
3.4.5. Transfer Function
3.5. Displacement Transducer
3.6. Overall Transfer Function and Major Parameters of the System
4. Results and Discussion
4.1. Analysis and Optimization
4.1.1. Stability Analysis
4.1.2. Analysis of Dynamic Characteristics
4.1.3. Optimization with Adaptive Fuzzy PID Control Algorithm
4.2. Response of the System to Random Road Vibration
4.2.1. Model of Road Vibration
4.2.2. Response to Random Road Vibration
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wolfgang, B. Hydropneumatic Suspension Systems; Springer: Berlin, Germany, 2022. [Google Scholar] [CrossRef]
- Sohail, A.; Liu, C. Study on the vibration isolation characteristics of an anti-resonant hydropneumatic suspension. J. Eng. 2019, 13, 208–210. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An Automated Driving Systems Data Acquisition and Analytics Platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated Vehicle Sideslip Angle Estimation Considering Signal Measurement Characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Solomon, U.; Padmanabhan, C. Hydro-gas suspension system for a tracked vehicle: Modeling and analysis. J. Terramech. 2011, 48, 125–137. [Google Scholar] [CrossRef]
- Qin, B.; Zeng, R.; Li, X.; Yang, J. Design and performance analysis of the hydropneumatic suspension system for a novel road-rail vehicle. Appl. Sci. 2021, 11, 2221. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, S.; Ruan, C. Statistical linearization analysis of a hydropneumatic suspension system with nonlinearity. IEEE Access. 2018, 6, 73760–73773. [Google Scholar] [CrossRef]
- Bai, X.; Lu, L.; Sun, M.; Zhao, L.; Li, H. Research on Hydro-pneumatic Suspension Test Bench Based on Electro-hydraulic Proportional Control. Int. J. Fluid Power. 2023, 24, 537–566. [Google Scholar] [CrossRef]
- Luan, Z.; Sun, J.; Yang, Q. Research of controllable load module analysis and control algorithm on linear motor test platform. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 647–650. [Google Scholar] [CrossRef]
- Kulkarni, P.; Sawant, P.; Kulkarni, V. Design and Development of Plane Bending Fatigue Testing Machine for Composite Material. Mater. Today Proc. 2018, 5, 11563–11568. [Google Scholar] [CrossRef]
- Gao, Y. Design and Control of Electro-hydraulic Servo Active Suspension Road Simulation System. Master’s Thesis, Jilin University, Changchun, China, 2018. [Google Scholar]
- Wang, B. Research on Reproduction Methods of Road Roughness Using Road Simulator. Doctor’s Thesis, Wuhan University of Technology, Wuhan, China, 2010. [Google Scholar]
- Li, X. Research on Hydraulic Servo Control System for Automobile Shock Absorber Test-Bench. Master’s Thesis, Liaoning University of Technology, Jinzhou, China, 2016. [Google Scholar]
- Chen, X.; Wang, W.; Yang, Y.; Liu, Y.; Chen, X. Analysis and Design of a Vertical Loading Test Rig for Independent Suspension with Adjustable Hard Points. Automot. Eng. 2017, 39, 689–697. [Google Scholar] [CrossRef]
- Yang, J. Suspension K&C Characteristic Sensitivity Analysis to Automotive Handling. Master’s Thesis, Jilin University, Changchun, China, 2008. [Google Scholar]
- Si, Y. Design and Application Research of Suspension Matching Test Bench. Master’s Thesis, Xihua University, Chengdu, China, 2016. [Google Scholar]
- Zhao, Q.; Qin, Y.; Sun, Z.; Wang, N. Simulation Research on the Electro-hydraulic Servo Suspension Test Bench. For. Eng. 2020, 36, 60–682. [Google Scholar] [CrossRef]
- Qin, Y. Road Spectrum Reproduction and Suspension Control Based on Electro-hydraulic Servo System. Master’s Thesis, Northeast Forestry University, Harbin, China, 2020. [Google Scholar]
- Liu, G.; Gao, J.; Nie, G.; Fang, T.; Wang, X. Simulation of Suspension Testbed Based on Fuzzy-PID Control. Agric. Equip. Veh. Eng. 2015, 53, 51–55. [Google Scholar]
- Du, S.; Wu, Y.; Liu, M.; Liu, Z.; Lu, Q. Research on Road Simulation Test-Bed of Passenger Car Suspension System. Automot. Digest. 2020, 6, 49–52. [Google Scholar] [CrossRef]
- Zhan, H. Study on Control Methods for Electro-hydraulic Servo Loading System of Vehicle Hydro-pneumatic Suspension. Doctor’s Thesis, Harbin Institute of Technology, Harbin, China, 2012. [Google Scholar]
- Xu, G.; Luo, Y.; Yang, Y.; Zhang, J. New wheel ground simulation load model and system for vehicle dynamic performancetest. J. Instrum. 2018, 39, 214–223. [Google Scholar] [CrossRef]
- Liu, G.; Chen, S.; Wang, W.; Zhao, Y. Simulation and experimental research of a novel hydro-pneumatic suspension based on AMEsim and simulink. J. Vib. Meas. Diagn. 2016, 36, 346–350. [Google Scholar] [CrossRef]
- Li, B. Analysis and Experimental Research of Proportional Valve with Displacement Feedback by the Moving Valve Sleeve. Master’s Thesis, Zhejiang University, Hangzhou, China, 2013. [Google Scholar]
- GB/T 7031-2005; Mechanical Vibration Road Surface Spectrum Measurement Data Report. National Mechanical vibration and shock Standardization Technical Committee: Beijing, China, 2006.
- JT/T 448-2021; Automotive Suspension Device Testing Platform. National Automobile Maintenance Standardisation Technical Committee: Beijing, China, 2021.
- QC/T491-2018; Performance Requirements and Bench Test Methods for Automotive Shock Absorbers. National Automobile Standardization Technical Committee: Beijing, China, 2018.
- GB1589-2004; Boundary Dimensions, Axle Load, and Mass Limits for Road Vehicles. Ministry of Industry and Information Technology: Beijing, China, 2004.
- Lu, Z.; Zhang, J.; Xu, B.; Wang, D.; Su, Q.; Qian, J.; Yang, P.; Pan, M. Deadzone compensation control based on detection of micro flow rate in pilot stage of proportional directional valve. ISA Trans. 2019, 94, 234–245. [Google Scholar] [CrossRef] [PubMed]
- Zheng, K.; Chen, S. Nonlinear Modeling and Simulation of Asymmetric Hydraulic Cylinder Systems Controlled By Proportional Valves. Hydraul. Pneum. 2013, 4, 25–29. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, T.; Lu, Q.; Xia, C.; Fu, J.; Wang, Y.; Wu, Z. Characteristics of Thermally Actuated Pneumatic Proportional Pressure Valves and Their Application. J. Inst. Eng. Ser. C 2020, 101, 631–641. [Google Scholar] [CrossRef]
- Zhao, W.; Li, L. A New K-DOPs Collision Detection Algorithms Improved by GA. In Proceedings of the International Conference on Wireless Communications and Applications, Huangshan, China, 25 October 2012. [Google Scholar]
- Liu, B.; Qiang, B.; Quan, H. Modeling and Simulation of Electrohydraulic Proportional Position Control System. Hydraul. Pneum. Seal. 2011, 31, 45–49. [Google Scholar] [CrossRef]
- Xiao, Z.; Xing, J.; Peng, L. Further Study of Load Flow and Load Pressure. Mach. Tool Hydraul. 2007, 35, 130–133. [Google Scholar] [CrossRef]
- Wang, L. Simulation Study on Hydraulic Proportional Adjustment Control of Coal Mining Machinery. Master’s Thesis, Anhui University of Science and Technology, Huainan, China, 2019. [Google Scholar]
- Li, M.; Ren, G. Research on Electro-Hydraulic Proportional Self-Tuning Fuzzy-PID Control System Based on MATLAB. Appl. Mech. Mater. 2013, 423–426, 2882–2885. [Google Scholar] [CrossRef]
- Yu, Z. Automotive Theory, 5th ed.; China Machine Press: Beijing, China, 2009. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Stroke | Piston Diameter (d1) | Piston Rod Diameter (d2) | Rated Pressure | Maximum Pressure |
|---|---|---|---|---|
| ±120 mm | 125 mm | 60 mm | 6 MPa | 15 MPa |
| Displacement | Maximum Speed | Rated Power | Rated Pressure | Maximum Pressure |
|---|---|---|---|---|
| 250 mL/r | 1450 rpm | 45 kW | 35 MPa | 40 MPa |
| Valve Weight | Rated Flow | Maximum Flow | Drift Diameter | Current Control Signal | Maximum Pressure |
|---|---|---|---|---|---|
| 11.5 kg | 300 L/min | 450 L/min | 16 mm | 4–20 mA | 31.5 MPa |
| Summary | Parameter | Summary | Parameter |
|---|---|---|---|
| Proportional amplifier gain (Ka) | 0.2 V/A | Hydraulic oil elastic modulus (βe) | 7 × 108 Pa |
| Proportional valve gain (Ksv) | 0.09 m3/(s·A) | Proportional valve flow gain (Kq) | 0.05 m2/s |
| Proportional valve damping ratio (ζsv) | 0.6 | Displacement sensor gain (Kd) | 1 V/m |
| Natural frequency of proportional valve (ωsv) | 314 rad/s | Equivalent total mass of piston (mt) | 5100 kg |
| Effective area of piston cavity (A1) | 1.23 × 10−2 m2 | Natural frequency of hydraulic system (ωp) | 154.42 rad/s |
| Effective area of rod cavity (A2) | 9.44 × 10−3 m2 | Damping ratio of hydraulic system (ζp) | 0.111 |
| Total volume of hydraulic cylinder (V) | 3.07 × 10−3 m3 | Internal leakage coefficient (Cip) | 3.3 × 10−3 m5/(N·s) |
| Initial volume of two chambers (V10/V20) | 3.74 × 10−4 m3 | External leakage coefficient (Cep) | 0 |
| Hydraulic spring stiffness (Ky) | 1.22 × 108 N/m | Equivalent leakage coefficient (Cie) | 3.61 × 10−11 m5/(N·s) |
| System flow coefficient (Kce) | 3.76 × 10−11 | Additional leakage coefficient (Cf) | −2.81 × 10−12 m5/(N·s) |
| △Kp/△Ki/△Kd | Ec | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| E | NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZP/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO | |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/PS/NS | NS/PS/ZO | |
| ZO | PM/NM/ZO | PM/NM/NS | ZS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO | |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO | |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/PS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB | |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB | |
| Road Classification | Road Roughness Coefficient (10−6 m3) | ||
| Lower Limit | Geometric Average | Upper Limit | |
| A | 8 | 16 | 32 |
| B | 32 | 64 | 128 |
| C | 128 | 256 | 512 |
| D | 512 | 1024 | 2048 |
| E | 2048 | 4096 | 8192 |
| F | 8192 | 16,384 | 32,768 |
| G | 32,768 | 65,536 | 131,072 |
| H | 131,072 | 262,144 | 524,288 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Jiao, B.; Sun, C.; Zhang, Y.; Zhao, H. Design and Optimization of Hydropneumatic Suspension Simulation Test Bench with Electro-Hydraulic Proportional Control. Machines 2023, 11, 907. https://doi.org/10.3390/machines11090907
Wu Z, Jiao B, Sun C, Zhang Y, Zhao H. Design and Optimization of Hydropneumatic Suspension Simulation Test Bench with Electro-Hydraulic Proportional Control. Machines. 2023; 11(9):907. https://doi.org/10.3390/machines11090907
Chicago/Turabian StyleWu, Zhibo, Bin Jiao, Chuanmeng Sun, Yanbing Zhang, and Heming Zhao. 2023. "Design and Optimization of Hydropneumatic Suspension Simulation Test Bench with Electro-Hydraulic Proportional Control" Machines 11, no. 9: 907. https://doi.org/10.3390/machines11090907
APA StyleWu, Z., Jiao, B., Sun, C., Zhang, Y., & Zhao, H. (2023). Design and Optimization of Hydropneumatic Suspension Simulation Test Bench with Electro-Hydraulic Proportional Control. Machines, 11(9), 907. https://doi.org/10.3390/machines11090907