


A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform


Abstract
:1. Introduction
- Using the FBSE technique, the current empirical wavelet transform will be revised.
- It has also been proposed to automate the process by employing the Fourier–Bessel series expansion-based empirical wavelet transform (FBSE-EWT).
- Crack fault with different levels in gear is the missing area of research.
- From each NBC, different statistical features were obtained.
- Multiple classifiers are used to categorize signals from the significant features; it is determined by the Kruskal–Wallis test.
- A comparative study has been carried out between existing EWT and proposed a novel methodology.
2. Proposed Methodology
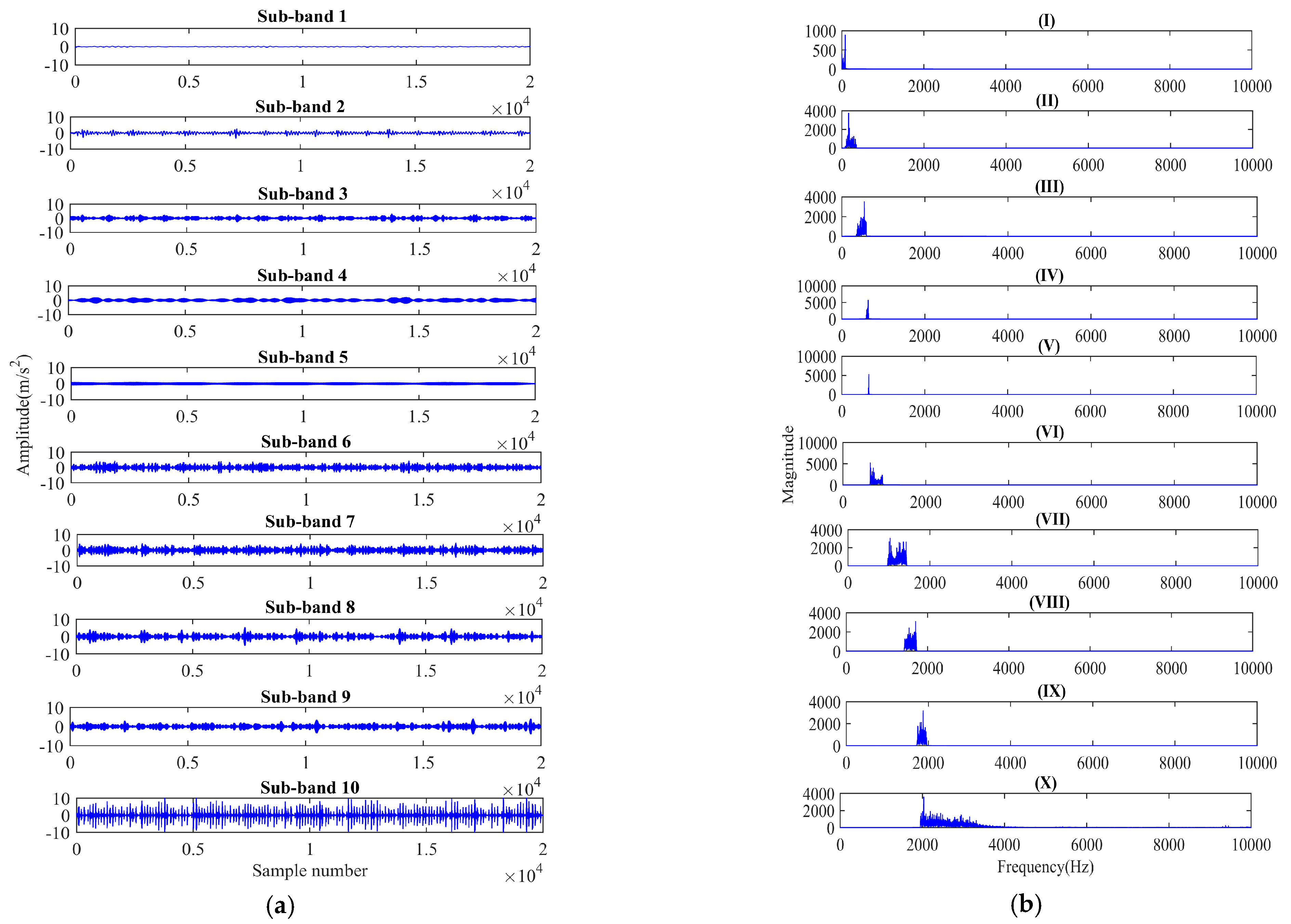
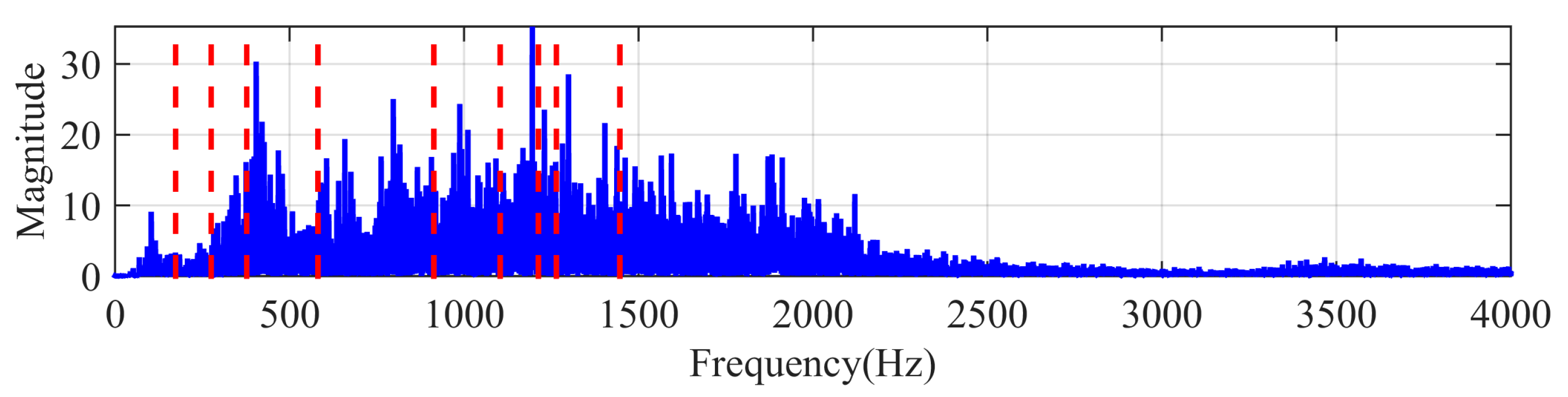
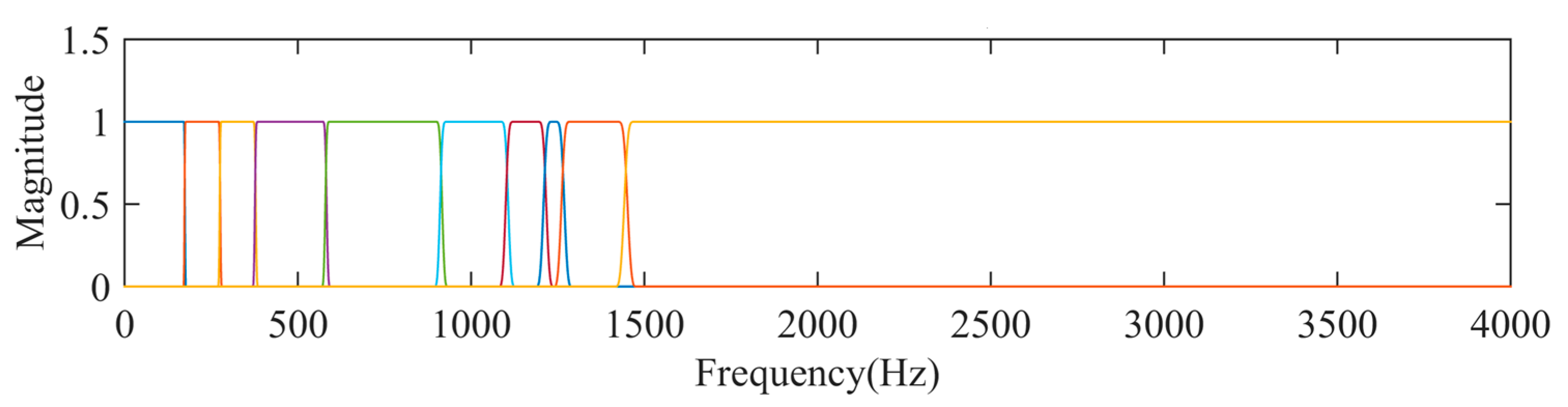
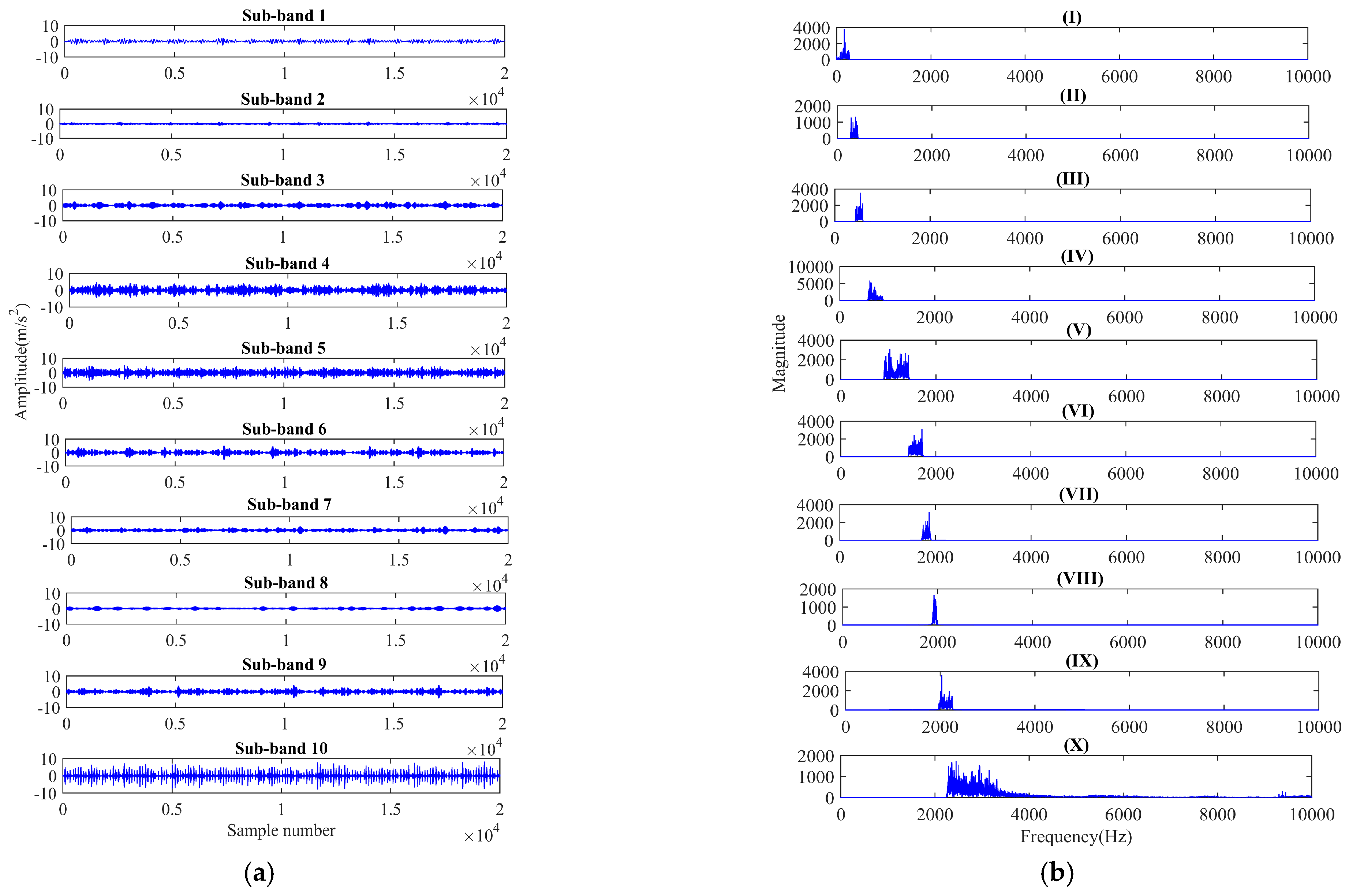
2.1. Brief Introduction to Fourier–Bessel Series Expansion—Empirical Wavelet Transform (FBSE-EWT)
- To begin with, when compared to traditional Fourier representation, the FBSE spectrum has a compact representation [25].
- Second, the FBSE spectrum avoids the spectral representation effect of windowing [25]. To limit the influence of spectral leakage, a window function is incorporated into the spectral representation that is based on FT. On the other hand, without the influence of windowing, the FBSE spectral can obtain signal characteristics even for signals with a short time.
2.2. Features Extraction
2.2.1. Kurtosis
2.2.2. Root Mean Square (RMS)
2.2.3. Variance
2.2.4. Shannon Entropy
2.3. The Kruskal–Wallis Statistical Test
2.4. Classifiers
2.4.1. Random Forest
2.4.2. C4.5 (J48) Decision Tree
- A tree’s leaf is labeled with the same class for instances of the same class.
- A test on each attribute’s prospective information is calculated. An attribute test determines the information obtained.
- The optimal branching property was chosen using the present criterion.
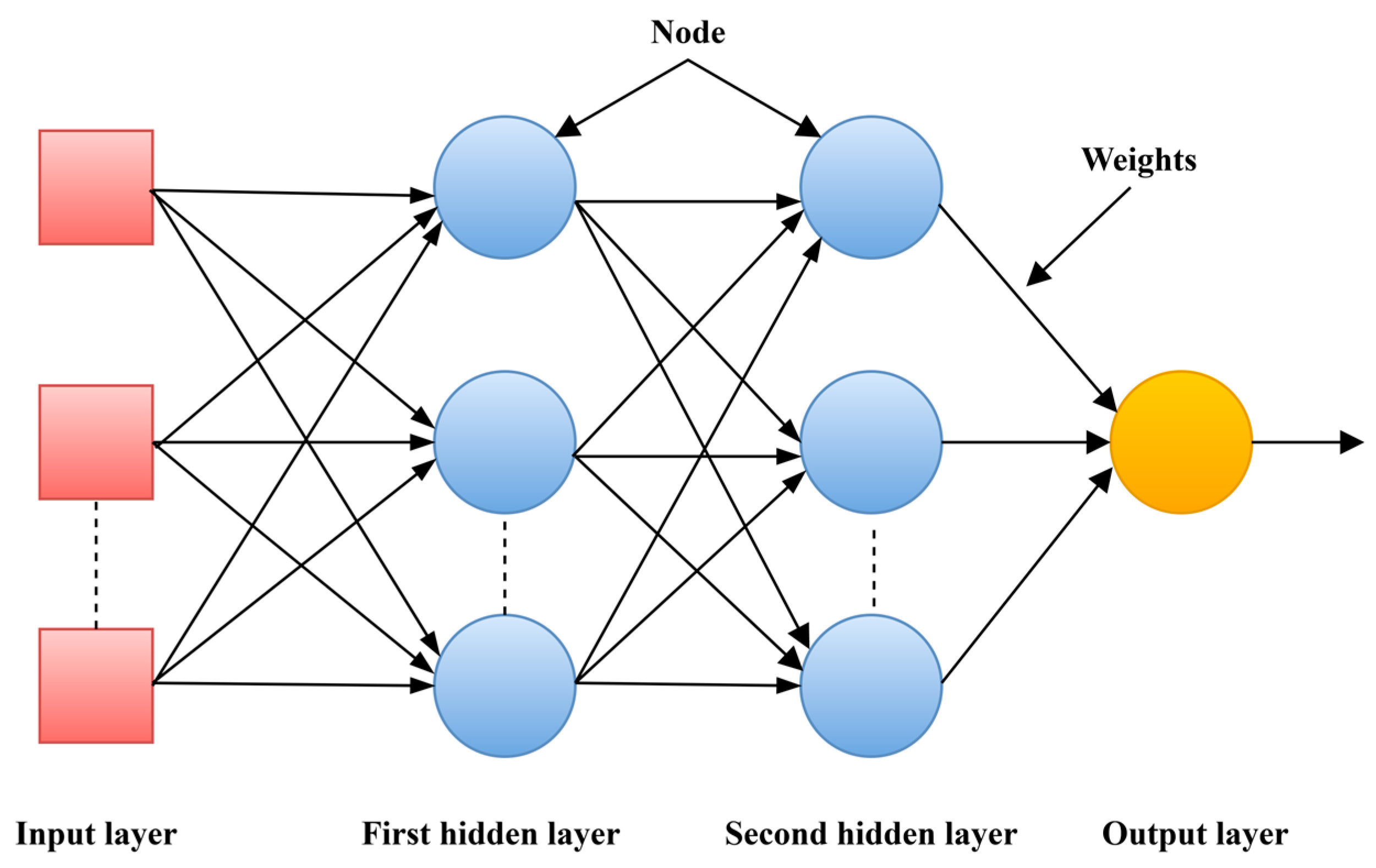
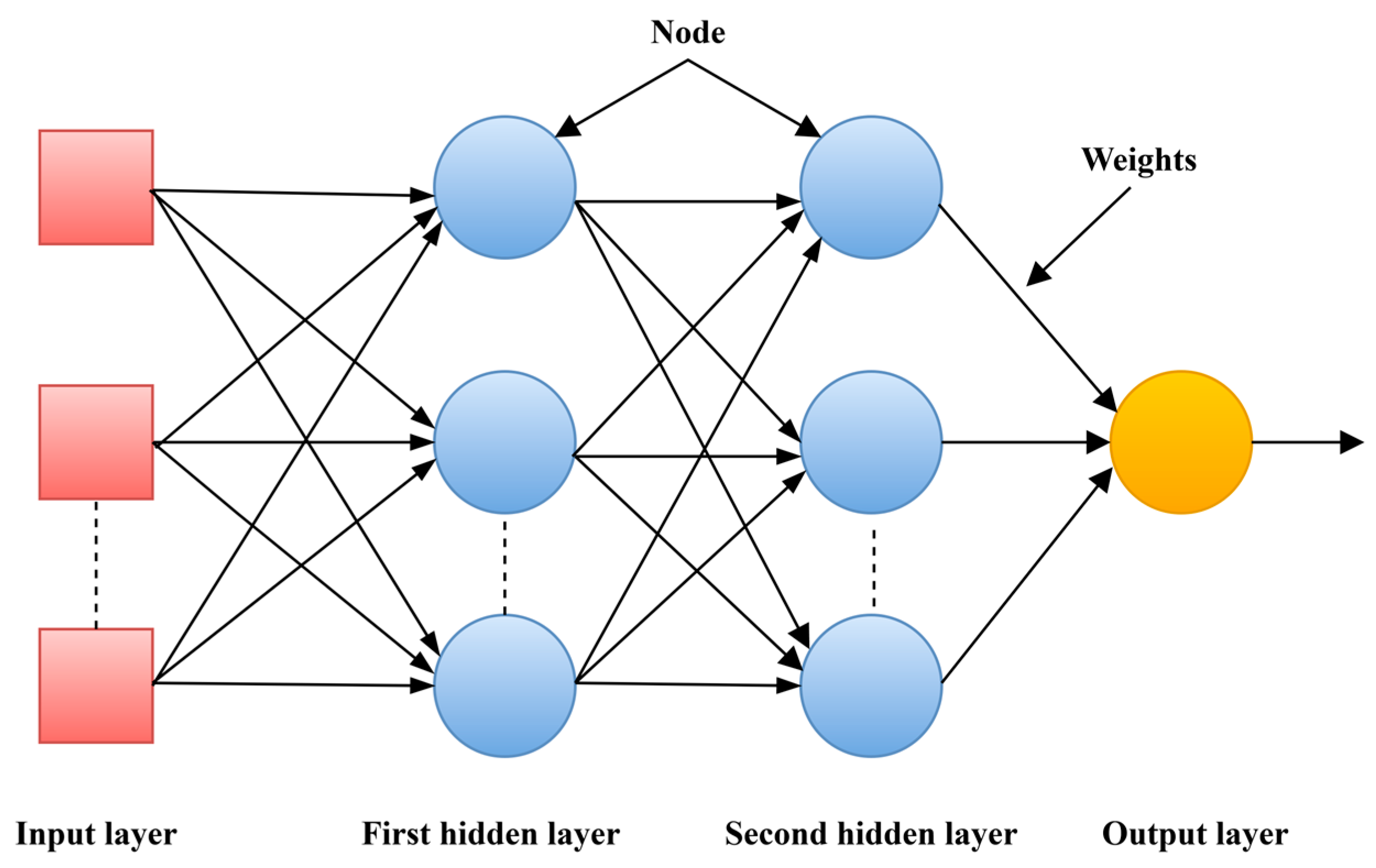
2.4.3. Multilayer Perceptron Classifier
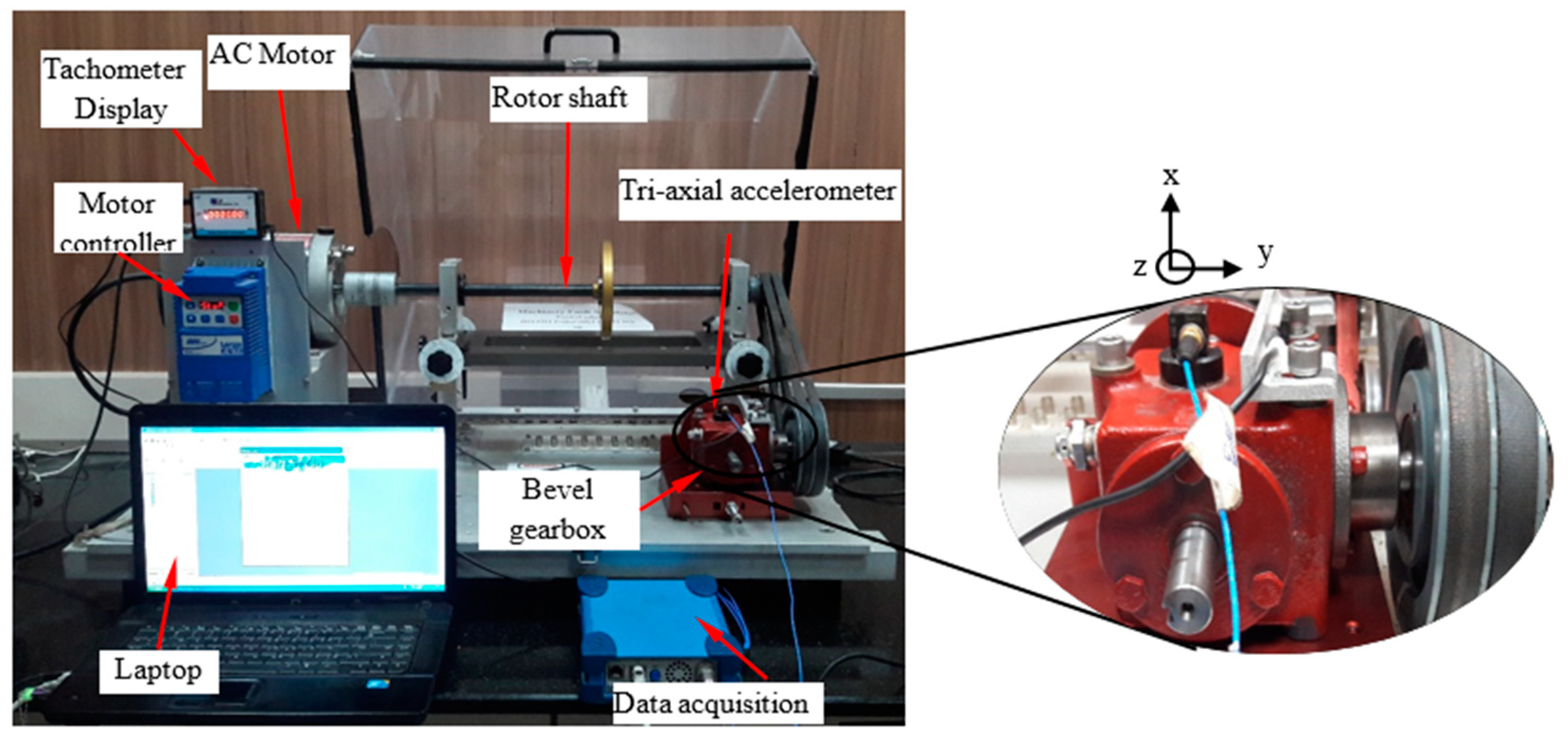
3. Experimental Study
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sheng, S. Monitoring of Wind Turbine Gearbox Condition through Oil and Wear Debris Analysis: A Full-Scale Testing Perspective. Tribol. Trans. 2016, 59, 149–162. [Google Scholar] [CrossRef]
- Nowakowski, T.; Tomaszewski, F.; Komorski, P.; Szymański, G.M. Tram Gearbox Condition Monitoring Method Based on Trackside Acoustic Measurement. Measurement 2023, 207, 112358. [Google Scholar] [CrossRef]
- Bagavathiappan, S.; Lahiri, B.B.; Saravanan, T.; Philip, J.; Jayakumar, T. Infrared Thermography for Condition Monitoring—A Review. Infrared Phys. Technol. 2013, 60, 35–55. [Google Scholar] [CrossRef]
- Su, Y.; Meng, L.; Kong, X.; Xu, T.; Lan, X.; Li, Y. Small Sample Fault Diagnosis Method for Wind Turbine Gearbox Based on Optimized Generative Adversarial Networks. Eng. Fail. Anal. 2022, 140, 106573. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A Convolutional Neural Network Based Feature Learning and Fault Diagnosis Method for the Condition Monitoring of Gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Lv, Y.; Zhao, W.; Zhao, Z.; Li, W.; Ng, K.K.H. Vibration Signal-Based Early Fault Prognosis: Status Quo and Applications. Adv. Eng. Inform. 2022, 52, 101609. [Google Scholar] [CrossRef]
- Mahgoun, H.; Chaari, F.; Felkaoui, A. Detection of Gear Faults in Variable Rotating Speed Using Variational Mode Decomposition (VMD). Mech. Ind. 2016, 17, 207. [Google Scholar] [CrossRef]
- Wang, W. Early Detection of Gear Tooth Cracking Using the Resonance Demodulation Technique. Mech. Syst. Signal Process. 2001, 15, 887–903. [Google Scholar] [CrossRef]
- Wang, D. K-Nearest Neighbors Based Methods for Identification of Different Gear Crack Levels under Different Motor Speeds and Loads: Revisited. Mech. Syst. Signal Process. 2016, 70–71, 201–208. [Google Scholar] [CrossRef]
- Yang, X.; Wang, L.; Ding, K.; Ding, X. Vibration AM-FM Sidebands Mechanism of Planetary Gearbox with Tooth Root Cracked Planet Gear. Eng. Fail. Anal. 2022, 137, 106353. [Google Scholar] [CrossRef]
- Aherwar, A. An Investigation on Gearbox Fault Detection Using Vibration Analysis Techniques: A Review. Aust. J. Mech. Eng. 2012, 10, 169–183. [Google Scholar] [CrossRef]
- Staszewski, W.J.; Tomlinson, G.R. Local Tooth Fault Detection in Gearboxes Using a Moving Window Procedure. Mech. Syst. Signal Process. 1997, 11, 331–350. [Google Scholar] [CrossRef]
- Cheng, G.; Cheng, Y.L.; Shen, L.H.; Qiu, J.B.; Zhang, S. Gear Fault Identification Based on Hilbert-Huang Transform and SOM Neural Network. Measurement 2013, 46, 1137–1146. [Google Scholar] [CrossRef]
- Upadhyay, N.; Kankar, P.K. Diagnosis of Bearing Defects Using Tunable Q-Wavelet Transform. J. Mech. Sci. Technol. 2018, 32, 549–558. [Google Scholar] [CrossRef]
- Saravanan, N.; Siddabattuni, V.N.S.K.; Ramachandran, K.I. Fault Diagnosis of Spur Bevel Gear Box Using Artificial Neural Network (ANN), and Proximal Support Vector Machine (PSVM). Appl. Soft Comput. J. 2010, 10, 344–360. [Google Scholar] [CrossRef]
- Saravanan, N.; Ramachandran, K.I. Incipient Gear Box Fault Diagnosis Using Discrete Wavelet Transform (DWT) for Feature Extraction and Classification Using Artificial Neural Network (ANN). Expert Syst. Appl. 2010, 37, 4168–4181. [Google Scholar] [CrossRef]
- Li, C.; Sanchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D.; Vásquez, R.E. Gearbox Fault Diagnosis Based on Deep Random Forest Fusion of Acoustic and Vibratory Signals. Mech. Syst. Signal Process. 2016, 76–77, 283–293. [Google Scholar] [CrossRef]
- Lobato, T.H.G.; da Silva, R.R.; da Costa, E.S.; Mesquita, A.L.A. An Integrated Approach to Rotating Machinery Fault Diagnosis Using, EEMD, SVM, and Augmented Data. J. Vib. Eng. Technol. 2020, 8, 403–408. [Google Scholar] [CrossRef]
- Han, D.; Zhao, N.; Shi, P. Gear Fault Feature Extraction and Diagnosis Method under Different Load Excitation Based on EMD, PSO-SVM and Fractal Box Dimension. J. Mech. Sci. Technol. 2019, 33, 487–494. [Google Scholar] [CrossRef]
- Kim, B.; Lee, J. Fault Diagnosis and Noise Robustness Comparison of Rotating Machinery Using CWT and CNN. Adv. Sci. Technol. Eng. Syst. J. 2021, 6, 1279–1285. [Google Scholar] [CrossRef]
- Mallat, S. A Theory for Multi-Resolution Signal Decomposition Wavelet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Syed, S.H.; Muralidharan, V. Feature Extraction Using Discrete Wavelet Transform for Fault Classification of Planetary Gearbox—A Comparative Study. Appl. Acoust. 2022, 188, 108572. [Google Scholar] [CrossRef]
- Ramteke, D.S.; Parey, A.; Pachori, R.B. Automated Gear Fault Detection of Micron Level Wear in Bevel Gears Using Variational Mode Decomposition. J. Mech. Sci. Technol. 2019, 33, 5769–5777. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Singh, L.; Pachori, R.B. Fourier-Bessel Series Expansion Based Empirical Wavelet Transform for Analysis of Non-Stationary Signals. Digit. Signal Process. 2018, 78, 185–196. [Google Scholar] [CrossRef]
- Kedadouche, M.; Thomas, M.; Tahan, A. A Comparative Study between Empirical Wavelet Transforms and Empirical Mode Decomposition Methods: Application to Bearing Defect Diagnosis. Mech. Syst. Signal Process. 2016, 81, 88–107. [Google Scholar] [CrossRef]
- Kumar, A.; Parey, A.; Kankar, P.K. Supervised Machine Learning Based Approach for Early Fault Detection in Polymer Gears Using Vibration Signals. Mapan-J. Metrol. Soc. India 2023, 38, 383–394. [Google Scholar] [CrossRef]
- Saravanan, N.; Cholairajan, S.; Ramachandran, K.I. Vibration-Based Fault Diagnosis of Spur Bevel Gear Box Using Fuzzy Technique. Expert Syst. Appl. 2009, 36, 3119–3135. [Google Scholar] [CrossRef]
- Muralidharan, A.; Sugumaran, V.; Soman, K.P.; Amarnath, M. Fault Diagnosis of Helical Gear Box Using Variational Mode Decomposition and Random Forest Algorithm. Struct. Durab. Health Monit. 2014, 10, 55. [Google Scholar]
- Zhang, Y.; Yu, K.; Lei, Z.; Ge, J.; Xu, Y.; Li, Z.; Ren, Z.; Feng, K. Integrated Intelligent Fault Diagnosis Approach of Offshore Wind Turbine Bearing Based on Information Stream Fusion and Semi-Supervised Learning. Expert Syst. Appl. 2023, 232, 120854. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, J.C.; Ren, Z.; Ni, Q.; Gu, F.; Feng, K.; Yu, K.; Ge, J.; Lei, Z.; Liu, Z. Digital Twin-Driven Partial Domain Adaptation Network for Intelligent Fault Diagnosis of Rolling Bearing. Reliab. Eng. Syst. Saf. 2023, 234, 109186. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Li, C.; Sanchez, R.V. Gearbox Fault Identification and Classification with Convolutional Neural Networks. Shock Vib. 2015, 2015, 390134. [Google Scholar] [CrossRef]
- Kateris, D.; Moshou, D.; Pantazi, X.E.; Gravalos, I.; Sawalhi, N.; Loutridis, S. A Machine Learning Approach for the Condition Monitoring of Rotating Machinery. J. Mech. Sci. Technol. 2014, 28, 61–71. [Google Scholar] [CrossRef]
- Schroeder, J. Signal Processing via Fourier-Bessel Series Expansion. Digit. Signal Process. 1993, 3, 112–124. [Google Scholar] [CrossRef]
- Sharma, V.; Parey, A. A Review of Gear Fault Diagnosis Using Various Condition Indicators. Procedia Eng. 2016, 144, 253–263. [Google Scholar] [CrossRef]
- Kruskal, W.H.; Wallis, W.A. Use of Ranks in One-Criterion Variance Analysis. J. Am. Stat. Assoc. 1952, 47, 583. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Module | 2 mm |
| The angle of a pitch for gear | 56°19′ |
| The angle of a pitch for pinion | 33°41′ |
| No. of teeth (pinion) | 18 |
| Gear ratio | 1.5:1 |
| No. of teeth (gear) | 27 |
| Pressure angle | 20° |
| Material (gear) | Forged steel |
| Material (pinion) | Forged steel |
| S. No. | Types of Gear Tooth Crack | Crack Image | Crack Length (mm) |
|---|---|---|---|
| 1. | Incipient crack tooth |  | 0.25 |
| 2. | Slight crack tooth |  | 0.50 |
| 3. | Moderate crack tooth |  | 0.75 |
| 4. | Severe crack tooth |  | 1.00 |
| The State of the Bevel Gear | Signal in the z-Direction (Vibration Signal) |
|---|---|
| Healthy gear | 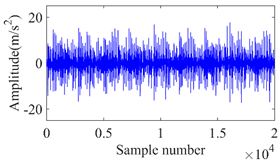 |
| Incipient crack tooth | 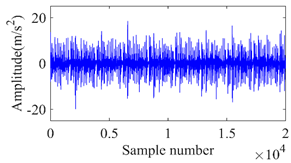 |
| Slight crack tooth | 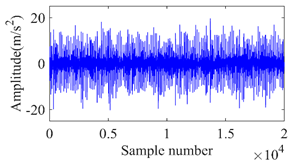 |
| Moderate crack tooth |  |
| Severe crack tooth |  |
| Methods | EWT | FBSE-EWT (Proposed Method) | ||||||
|---|---|---|---|---|---|---|---|---|
| Bands | Kurtosis | RMS | Variance | Shannon Entropy | Kurtosis | RMS | Variance | Shannon Entropy |
| Sub-band 1 | 1.0591 × 10−9 | 7.6275 × 10−5 | 7.7517 × 10−5 | 4.7474 × 10−7 | 1.2526 × 10−6 | 0 | 0 | 0 |
| Sub-band 2 | 0 | 0 | 0 | 0 | 1.3039 × 10−6 | 0 | 0 | 0 |
| Sub-band 3 | 0.0001 | 0 | 0 | 0 | 0 | 1.0831 × 10−7 | 1.0839 × 10−7 | 3.4883 × 10−8 |
| Sub-band 4 | 0.0021 | 0 | 0 | 0 | 1.3918 × 10−8 | 0 | 0 | 0 |
| Sub-band 5 | 0.0001 | 0 | 0 | 0 | 0.008 | 0 | 0 | 0 |
| Sub-band 6 | 0.0010 | 0 | 0 | 0 | 0.0111 | 0 | 0 | 0 |
| Sub-band 7 | 0.0075 | 0 | 0 | 0 | 0.0020 | 0 | 0 | 0 |
| Sub-band 8 | 0.7022 | 0 | 0 | 0 | 0.0029 | 9.0985 × 10−9 | 0 | 8.0157 × 10−9 |
| Sub-band 9 | 0.4692 | 0 | 0 | 0 | 0.0034 | 1.8916 × 10−7 | 1.8847 × 10−7 | 1.4926 × 10−7 |
| Sub-band 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| S. No. | Features | Performance of the Classifiers (%) Using EWT | Performance of the Classifiers (%) Using FBSE-EWT (Proposed Method) | ||||
|---|---|---|---|---|---|---|---|
| Random Forest | Multilayer Perceptron | J48 | Random Forest | Multilayer Perceptron | J48 | ||
| 1 | Kurtosis | 57 | 43.5 | 40 | 77.5 | 55 | 42 |
| 2 | RMS | 62.5 | 51.5 | 52 | 67 | 61.5 | 51 |
| 3 | Variance | 59 | 46 | 43.5 | 68.5 | 48.5 | 43.5 |
| 4 | Shannon entropy | 59.5 | 59.5 | 44 | 67.5 | 46.5 | 44 |
| 5 | Kurtosis and RMS | 66.5 | 55 | 50 | 83.5 | 66 | 53 |
| 6 | Kurtosis and variance | 66 | 51.5 | 53 | 73 | 62.5 | 53.5 |
| 7 | Kurtosis and Shannon entropy | 68.5 | 50.5 | 49 | 84 | 73 | 55 |
| 8 | RMS and variance | 59 | 54 | 46 | 66.5 | 63 | 46 |
| 9 | RMS and Shannon entropy | 59 | 53 | 43 | 69.5 | 60 | 50 |
| 10 | Variance and Shannon entropy | 61 | 48 | 41 | 69.5 | 48 | 41 |
| 11 | Kurtosis, RMS, and variance | 65.5 | 54 | 44 | 72.5 | 68 | 46.5 |
| 12 | Kurtosis, variance, and Shannon entropy | 66 | 54.5 | 42 | 73 | 61.5 | 43 |
| 13 | RMS, variance, and Shannon entropy | 60 | 51.5 | 49 | 64.5 | 55 | 49 |
| 15 | RMS, Shannon entropy, and kurtosis | 66.5 | 53.5 | 39 | 82.5 | 72.5 | 39 |
| Authors | Vibration Signal | Method | Feature | Classifier | Accuracy (%) |
|---|---|---|---|---|---|
| Saravanan et al. [15] | Bevel gearbox signals | CWT | Statistical features | ANN | 97.5 |
| Saravanan et al. [16] | Bevel gearbox signals | DWT | Statistical features | ANN | 95 |
| Proposed method | Bevel gearbox signals | FBSE-EWT | Kurtosis and Shannon entropy | Random forest | 84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramteke, D.S.; Parey, A.; Pachori, R.B. A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform. Machines 2023, 11, 1055. https://doi.org/10.3390/machines11121055
Ramteke DS, Parey A, Pachori RB. A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform. Machines. 2023; 11(12):1055. https://doi.org/10.3390/machines11121055
Chicago/Turabian StyleRamteke, Dada Saheb, Anand Parey, and Ram Bilas Pachori. 2023. "A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform" Machines 11, no. 12: 1055. https://doi.org/10.3390/machines11121055
APA StyleRamteke, D. S., Parey, A., & Pachori, R. B. (2023). A New Automated Classification Framework for Gear Fault Diagnosis Using Fourier–Bessel Domain-Based Empirical Wavelet Transform. Machines, 11(12), 1055. https://doi.org/10.3390/machines11121055