
Investigation of High-Speed Dynamic Transmission Error Testing Using Gear Strain

Abstract
:1. Introduction
2. Computation of Dynamic Transmission Error
2.1. Stress–Strain Stiffness Method
2.2. Magnetic Grating Method
3. Transmission Error Test
3.1. Constructing a Test Bench for the Transmission Error Theory
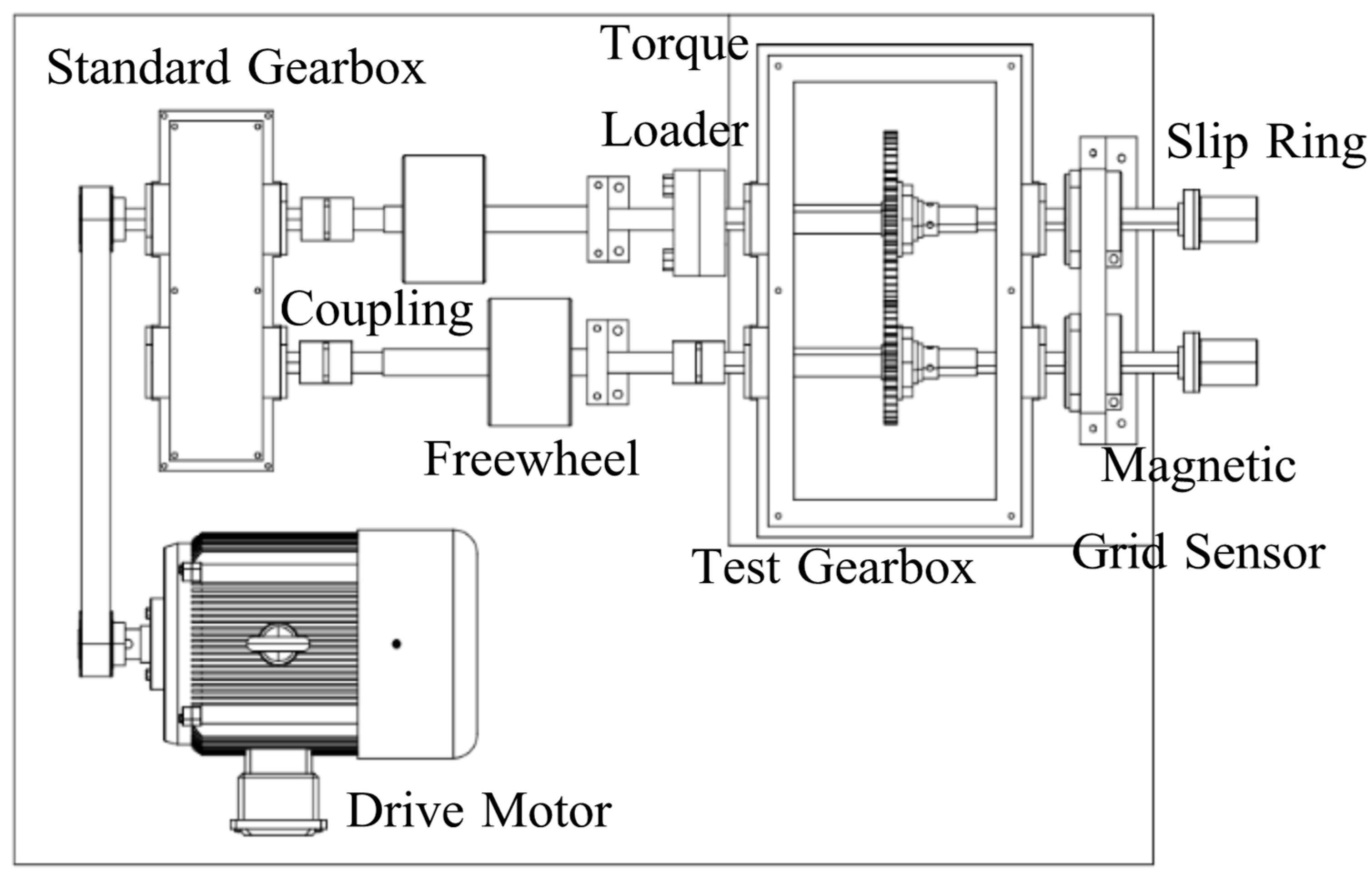
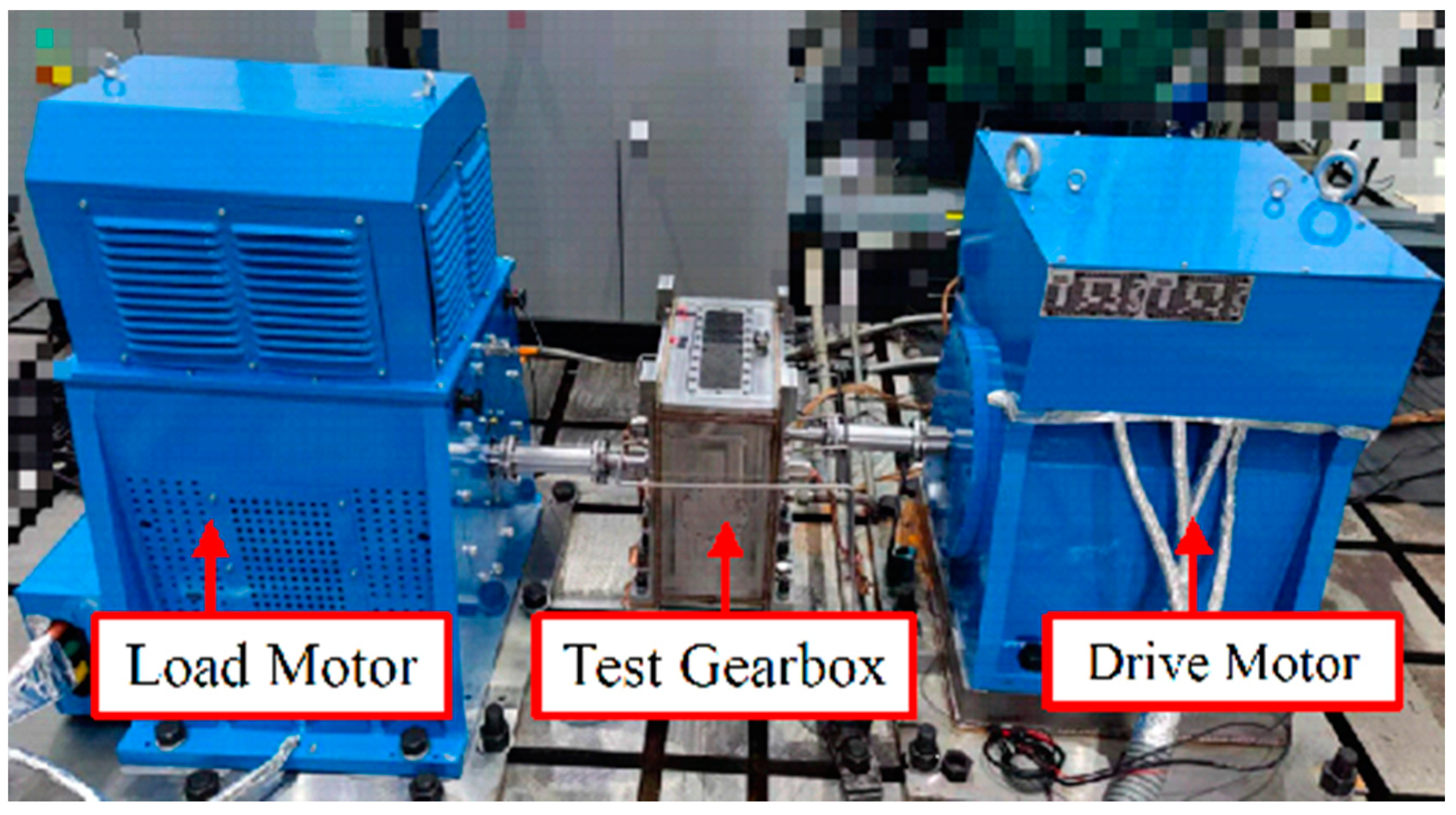
3.2. Building a High-Speed Dynamic Test Bench
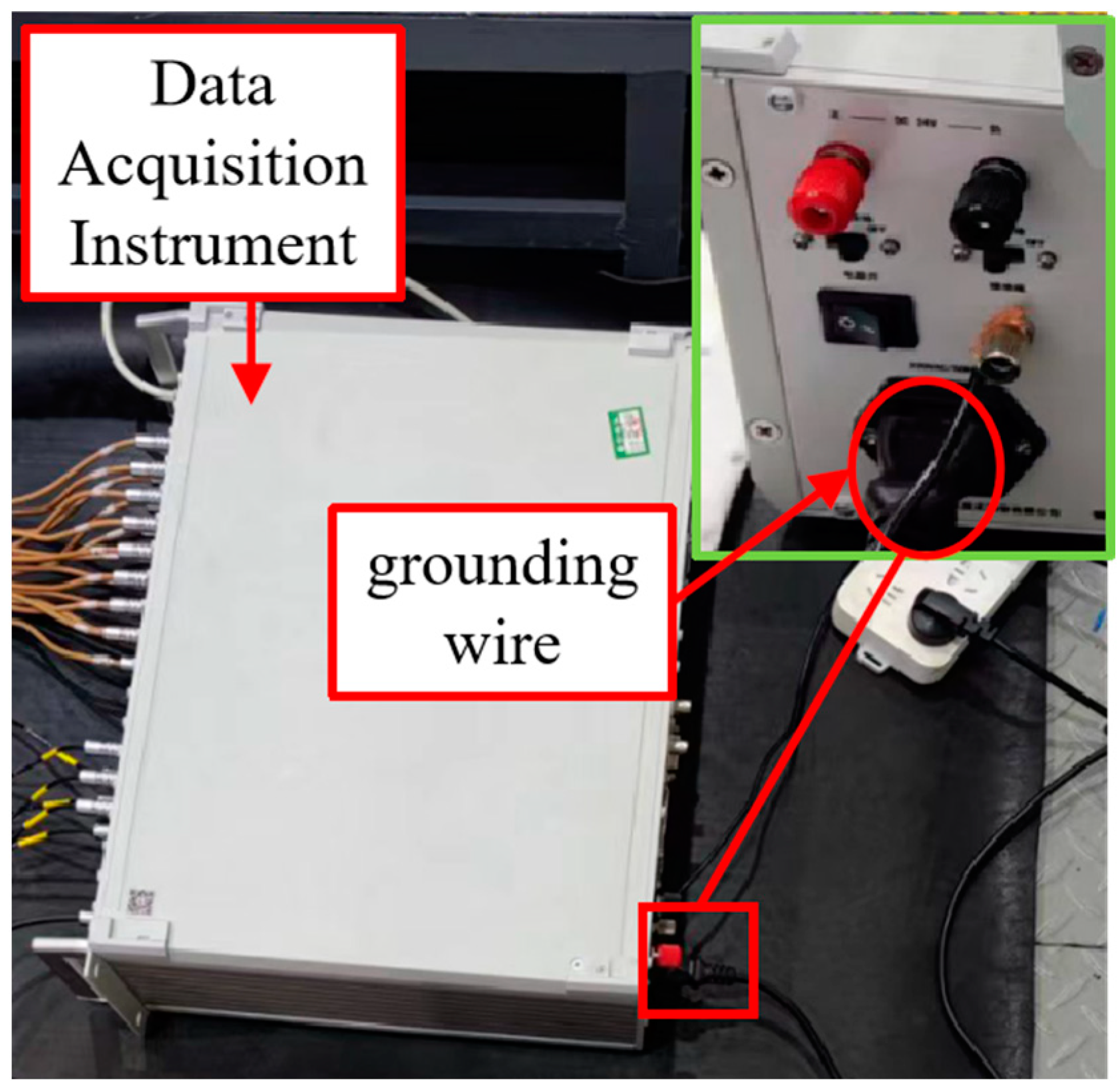
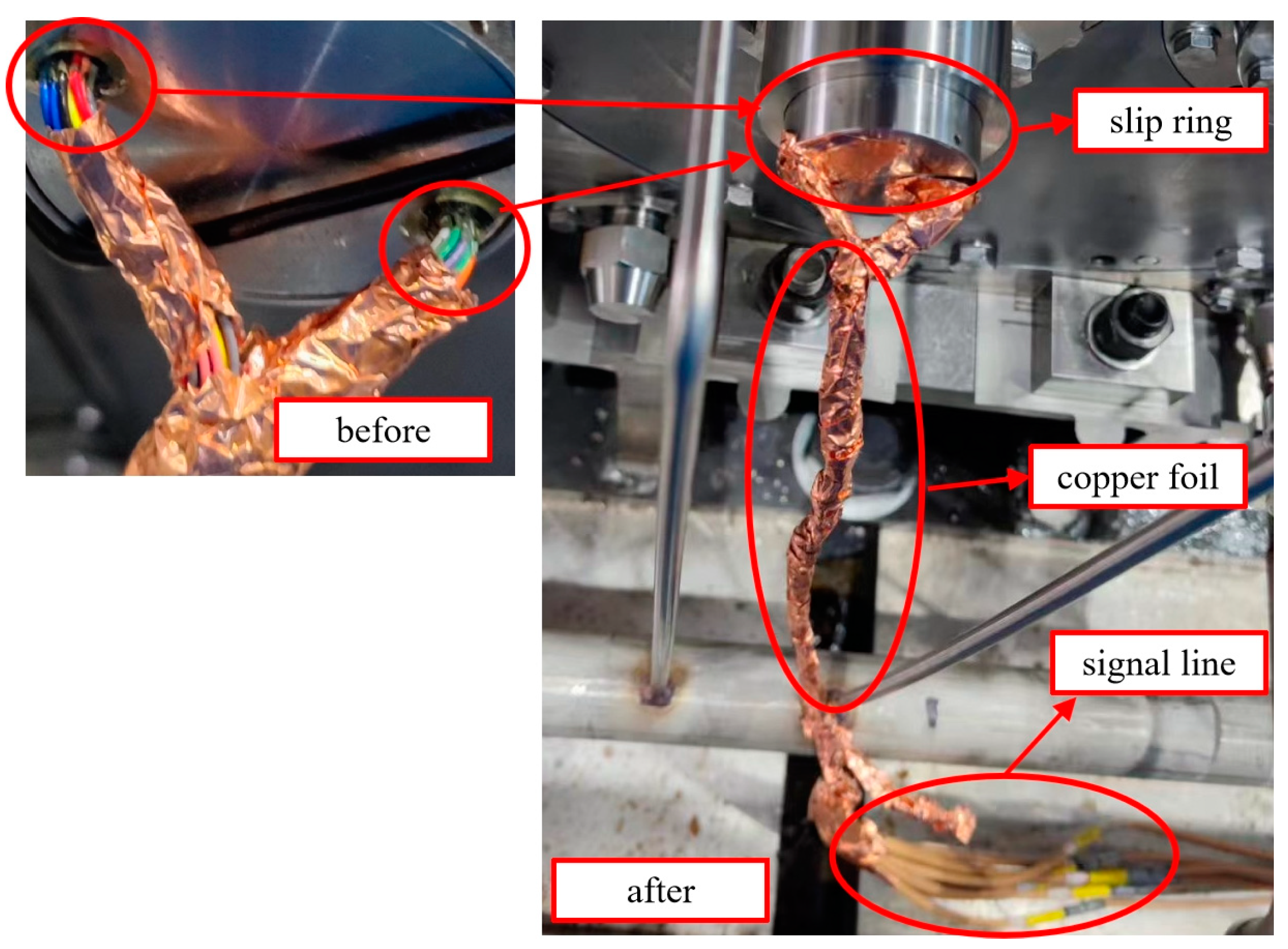
3.3. Test Environment Noise Reduction
4. Test Data Processing
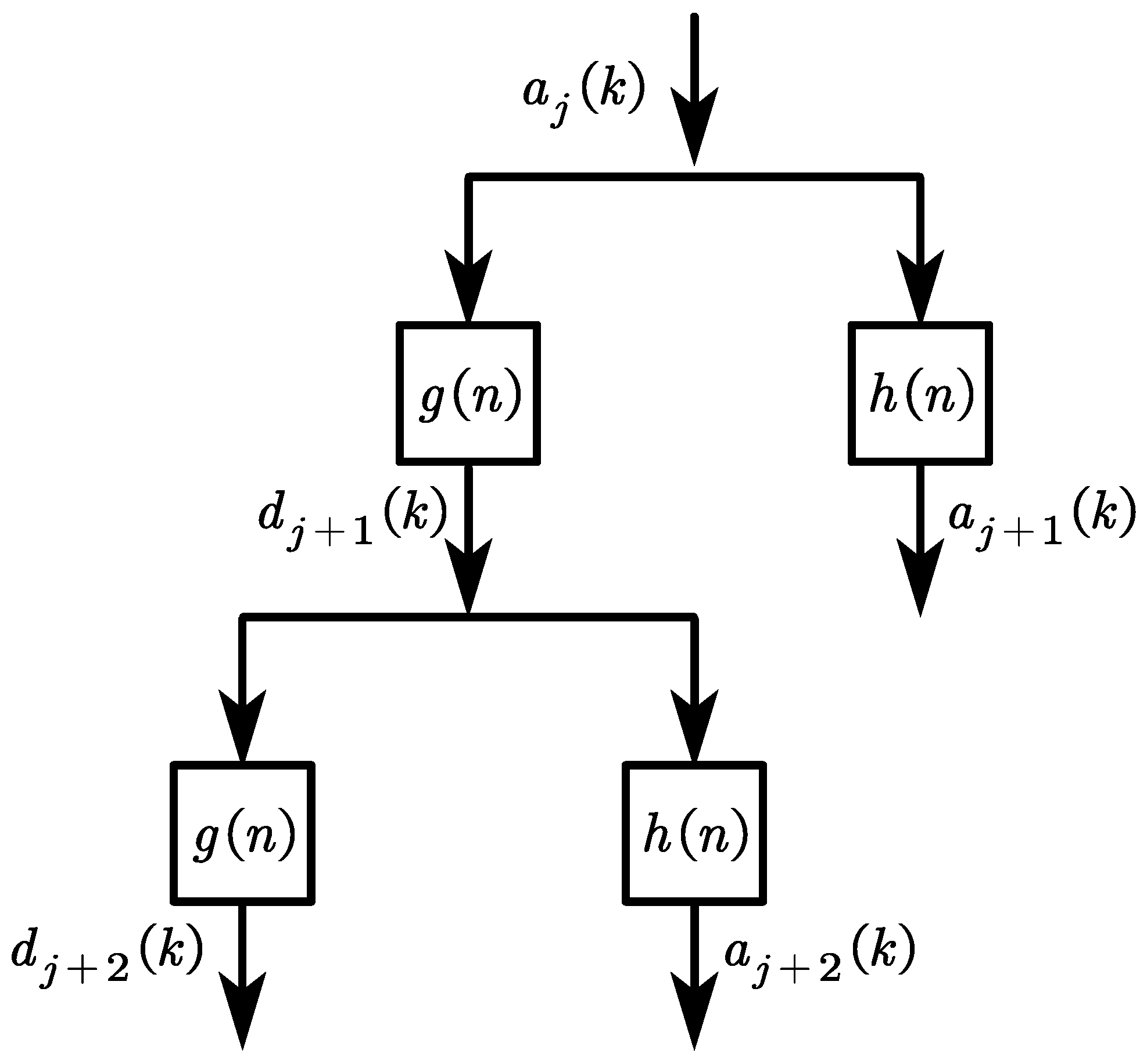
4.1. Wavelet Decomposition Based on Mallat Algorithm
4.2. Wavelet Decomposition Scale Calculation
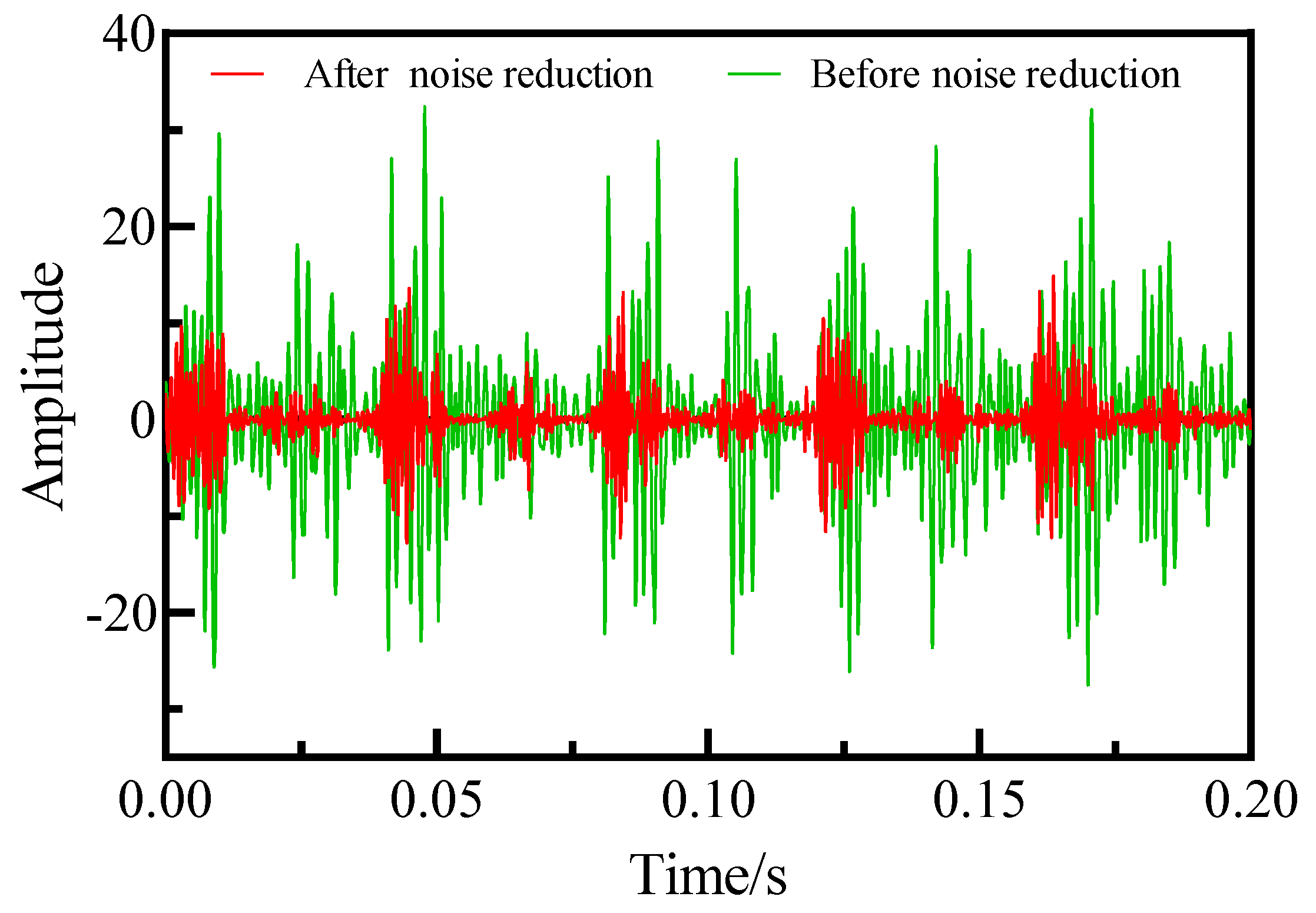
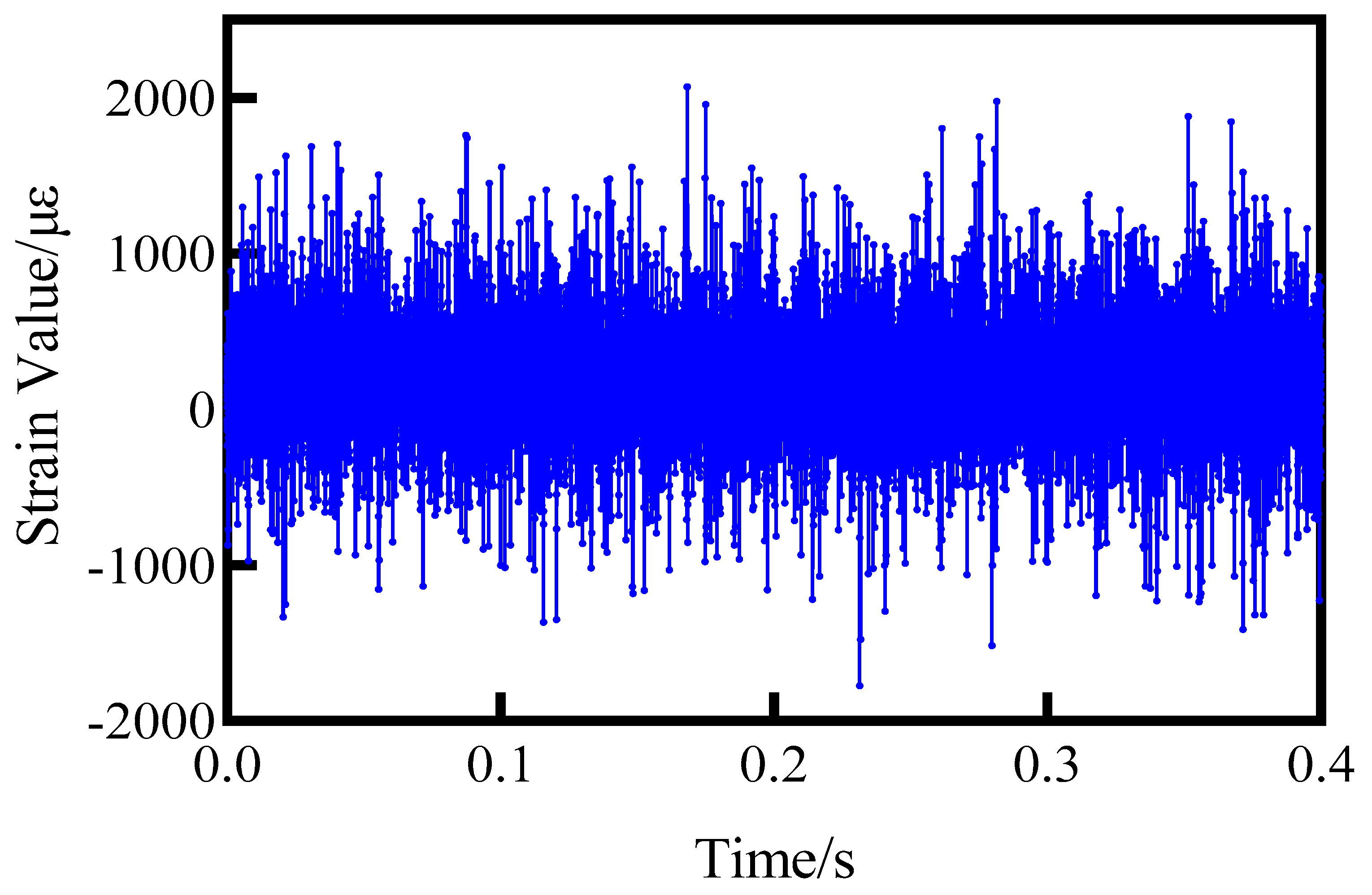
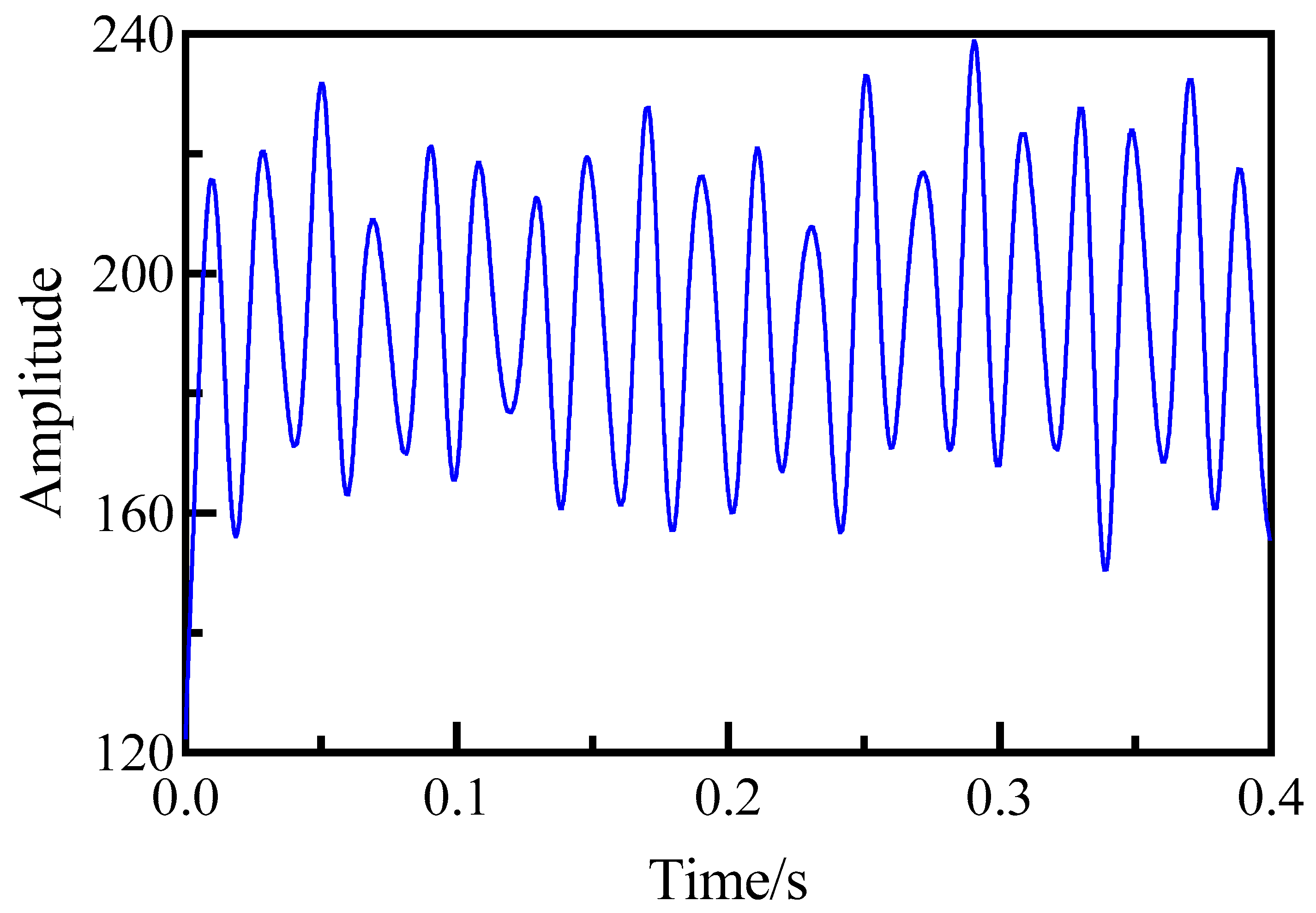
4.3. Test Data Denoising Processing
5. Test Results
5.1. Principle Test Results of Transmission Error
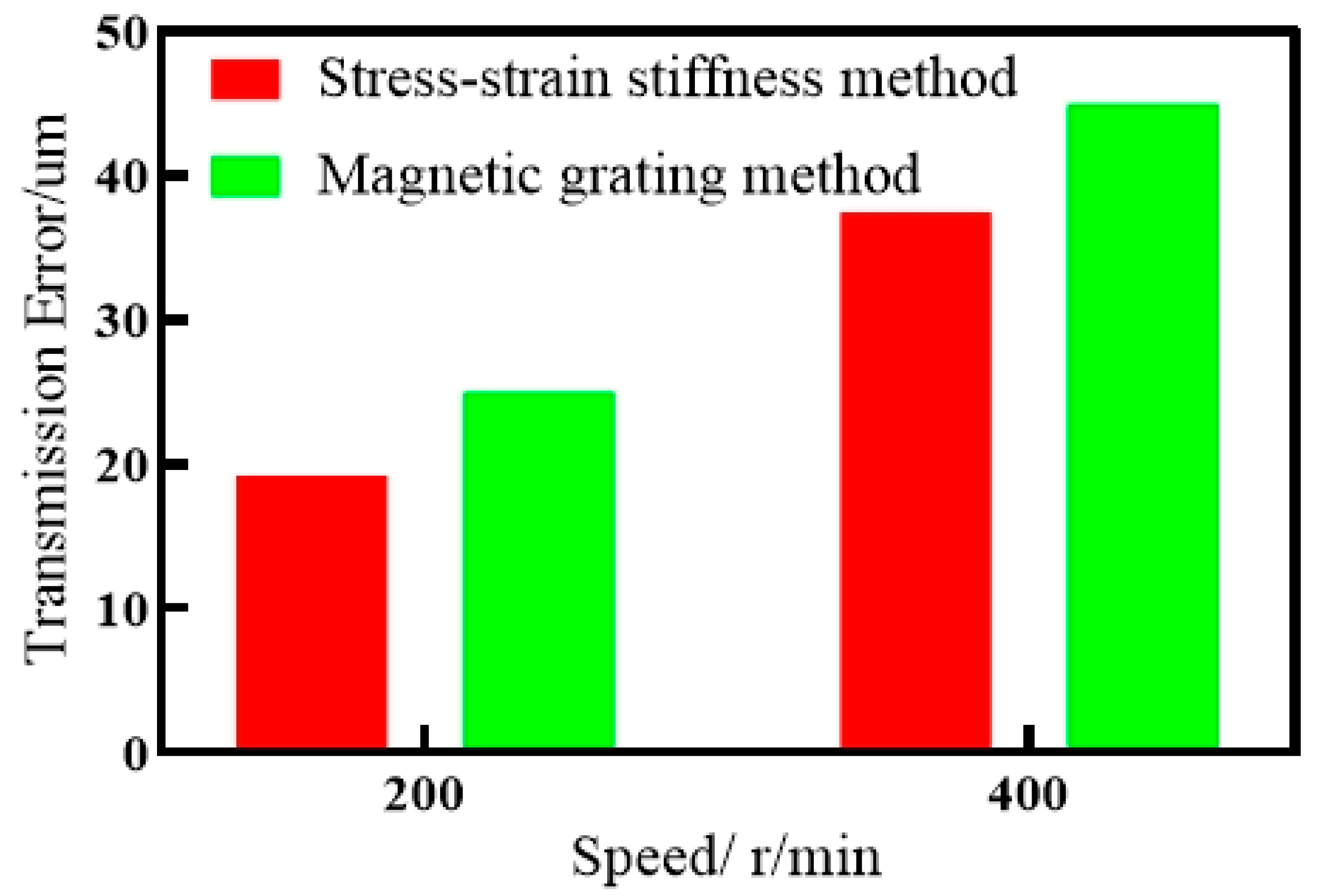
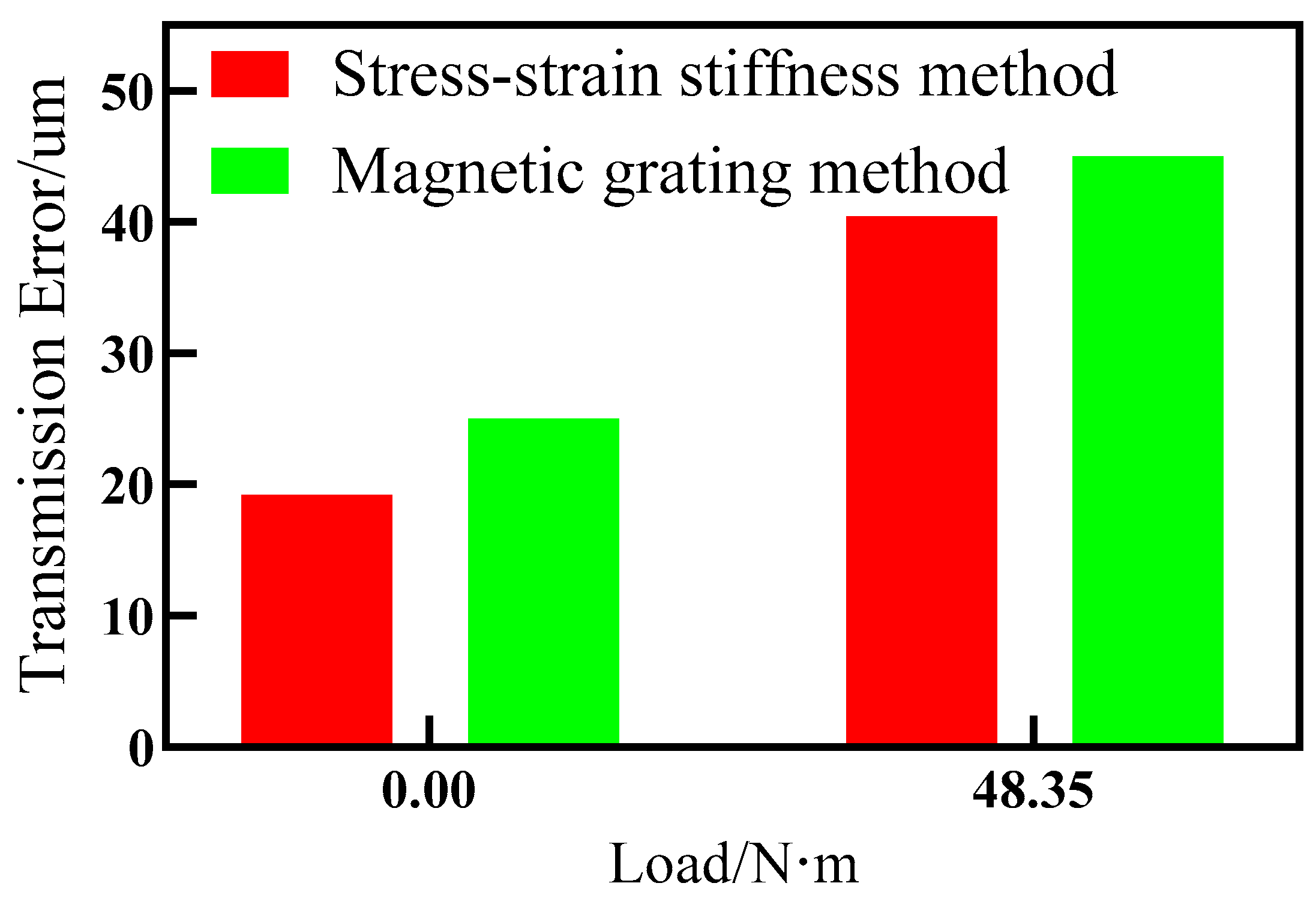
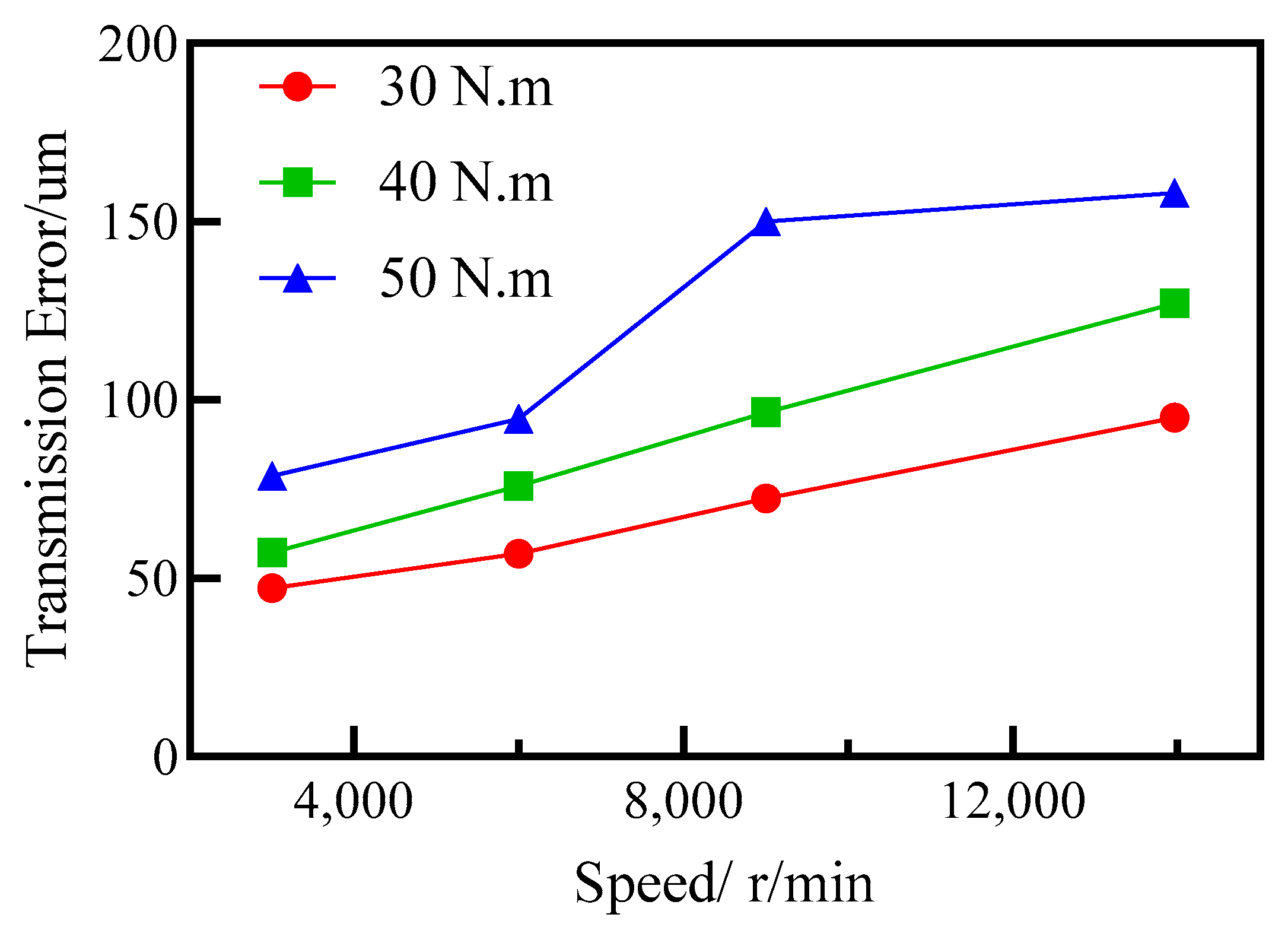
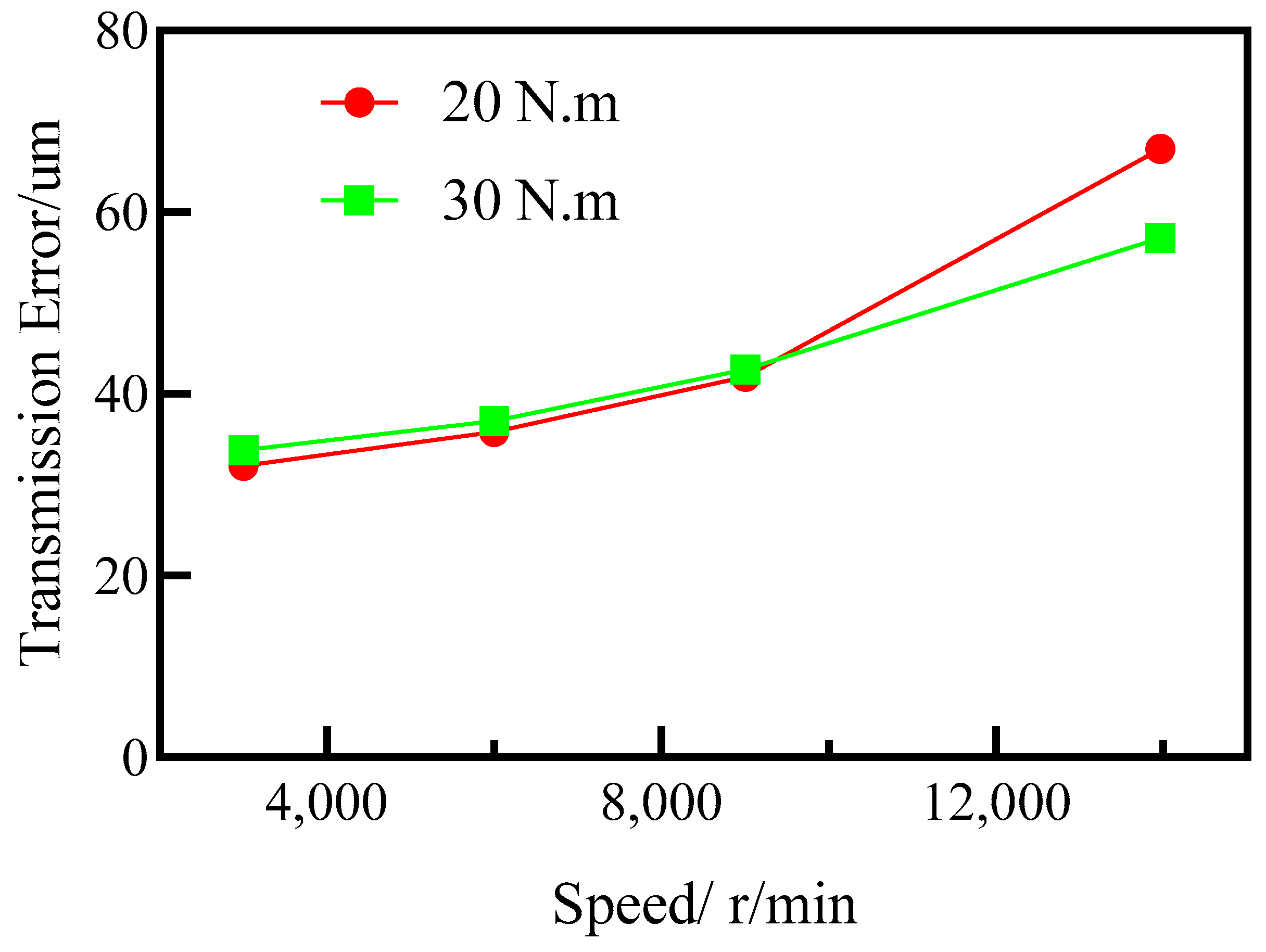
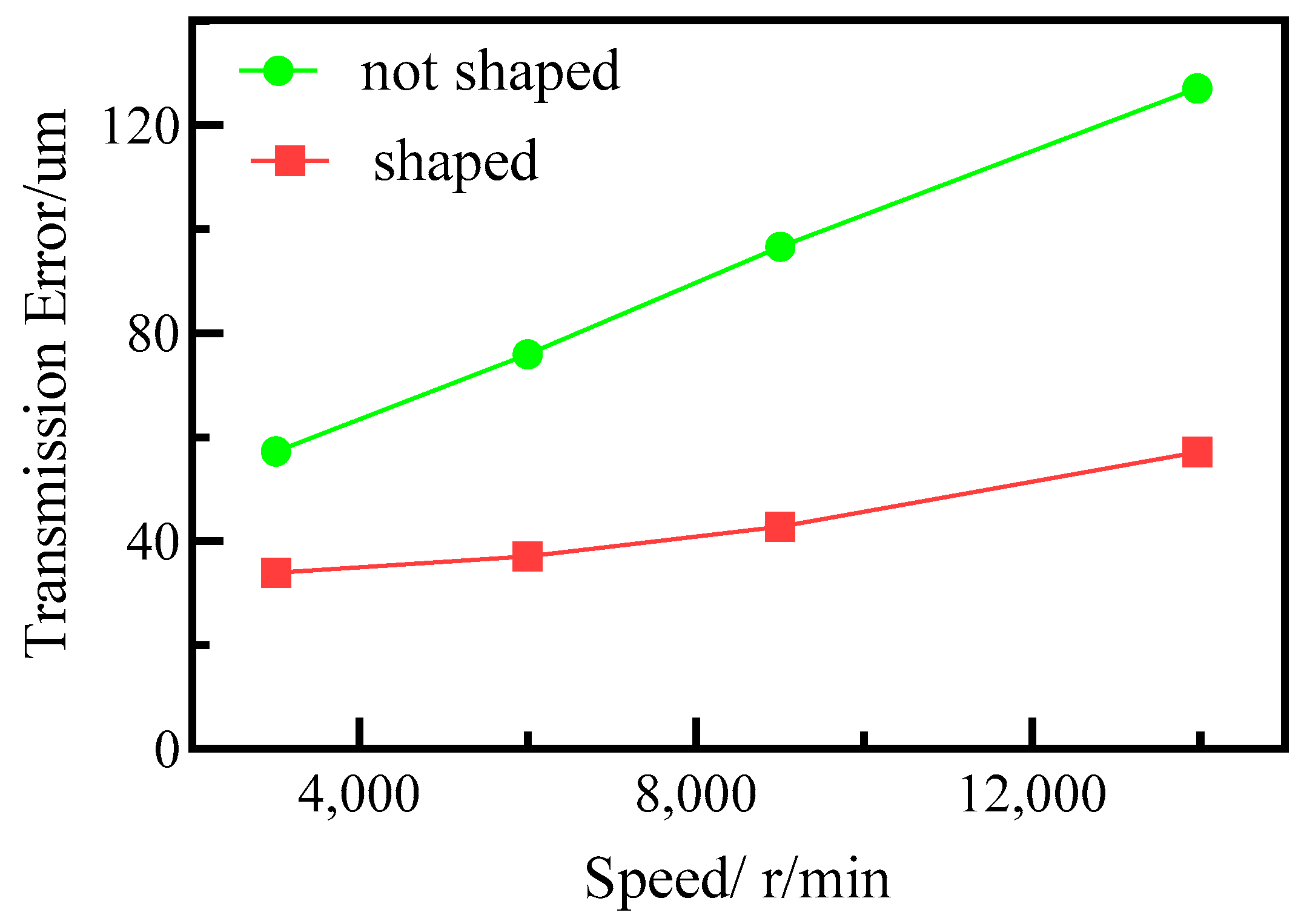
5.2. High-Speed Dynamic Test Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Peng, J. Analysis of the Influence of Dynamic Characteristics of Gear Transmission System on Transmission Error; Chongqing University of Technology: Chongqing, China, 2019. [Google Scholar]
- Choi, Y.S.; Lee, B.H.; Shin, Y.H. Nonlinear Dynamic Analysis of Gear Driving System due to Transmission Error and Backlash. Trans. Korean Soc. Automot. Eng. 1997, 5, 69–78. [Google Scholar]
- Zhou, W.; Zhu, R.; Liu, W.; Shang, Y. An Improved Dynamic Transmission Error Model Applied on Coupling Analysis of Gear Dynamics and Elastohydrodynamic Lubrication. J. Tribol. 2022, 144, 051601. [Google Scholar] [CrossRef]
- Wei, J.; Gao, P.; Hu, X.; Sun, W.; Zeng, J. Effects of dynamic transmission errors and vibration stability in helical gears. J. Mech. Sci. Technol. 2014, 28, 2253–2262. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Chang, S. Exception prediction by dynamic transmission error under slipping friction in hydraulic gear system. J. Tianjin Univ. Engl. Ed. 2013, 19, 6. [Google Scholar]
- Li, F. Error Detection and Analysis of Cylindrical Gear Transmission Based on Digital Image Correlation; Zhengzhou University: Zhengzhou, China, 2020. [Google Scholar]
- Wang, Z.G.; Chen, Y.C. Design of a helical gear set with adequate linear tip-relief leading to improved static and dynamic characteristics. Mech. Mach. Theory 2020, 147, 103742. [Google Scholar] [CrossRef]
- Wan, Q.Z.; Lu, Z.G.; Wang, K.; Dong, X.Z.; Duan, W.G.; Tong, Q.B.; Li, G.B. Precision harmonic gear reducer transmission error analysis. Instrum. Technol. Sens. 2013, 42, 51–54. [Google Scholar]
- Hu, Q.; Liu, Z.; Yang, C.; Xie, F. Research on dynamic transmission error of harmonic drive with uncertain parameters by an interval method. Precis. Eng. 2021, 68, 285–300. [Google Scholar] [CrossRef]
- Wang, G.; Chen, L.; Yu, L.; Zou, S. Research on the dynamic transmission error of a spur gear pair with eccentricities by finite element method. Mech. Mach. Theory 2017, 109, 1–13. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, Z.; Liu, Z.; Yu, L.; Gang, H. Test and simulation verification of gear transmission error. Mech. Transm. 2019, 43, 144–147. [Google Scholar]
- Lou, J.; Ma, Z.; Lei, D.; He, L. A testing method for dynamic transmission error of high-speed accessory transmission gears in aircraft engines. Mech. Transm. 2020, 44, 164–167. [Google Scholar]
- Benatar, M.; Handschuh, M.J.; Kahraman, A.; Talbot, D. Static and Dynamic Transmission Error Measurements of Helical Gear Pairs with Various Tooth Modifications. J. Mech. Des. 2019, 141, 103301. [Google Scholar] [CrossRef]
- Anichowski, B.; Kahraman, A.; Talbot, D. Dynamic Transmission Error Measurements From Spur Gear Pairs Having Tooth Indexing Errors. In Proceedings of the ASME International Design Engineering Technical Conferences & Computers & Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar]
- Chun, X.; Chen, S. Experimental study of the effect of assembly error on the lightly loaded transmission error of spur gear with crown modification. J. Low Freq. Noise Vib. Act. Control. 2020, 39, 1039–1051. [Google Scholar] [CrossRef]
- Liang, Z.; Zhao, K.; Liu, Y.; Ye, J. Gear dynamic transmission error measurement system based on photoelectric encoder. Mech. Transm. 2018, 42, 151–156. [Google Scholar]
- Chen, Q.; Jiang, P.; Hu, Z.; Tang, J. High speed straight bevel gear transmission error testing and dynamic performance analysis. Mech. Transm. 2016, 40, 101–105+147. [Google Scholar]
- Peng, D.; Zheng, Y.; Chen, R.; Gao, Z.; Zheng, F. Development of a dynamic testing system for transmission error based on time grating sensors. China Mech. Eng. 2011, 22, 1138–1142. [Google Scholar]
- Palermo, A.; Britte, L.; Janssens, K.; Mundo, D.; Desmet, W. The measurement of Gear Transmission Error as an NVH indicator: Theoretical discussion and industrial application via low-cost digital encoders to an all-electric vehicle gearbox. Mech. Syst. Signal Process. 2018, 110, 368–389. [Google Scholar] [CrossRef]
- Tamminana, V.K.; Kahraman, A.; Vinayaka, S. A Study of the Relationship Between the Dynamic Factors and the Dynamic Transmission Error of Spur Gear Pairs. J. Mech. Des. 2007, 129, 75–84. [Google Scholar] [CrossRef]
- Hotait, M.A.; Kahraman, A. Experiments on the relationship between the dynamic transmission error and the dynamic stress factor of spur gear pairs. Mech. Mach. Theory 2013, 70, 116–128. [Google Scholar] [CrossRef]
- Henriksson, M. Analysis of gear noise and dynamic transmission error measurements. ASME Int. Mech. Eng. Congr. Expo. 2004, 47020, 229–237. [Google Scholar]
- Park, S.; Kim, S.; Choi, J.-H. Gear Fault Diagnosis using Transmission Error and Ensemble Empirical Mode Decomposition. Mech. Syst. Signal Process. 2018, 108, 262–275. [Google Scholar] [CrossRef]
- Chin, Z.Y.; Smith, W.A.; Borghesani, P.; Randall, R.B.; Peng, Z. Absolute transmission error: A simple new tool for assessing gear wear. Mech. Syst. Signal Process. 2021, 146, 107070. [Google Scholar] [CrossRef]
- Sanchez-Espiga, J.; Fernandez-del-Rincon, A.; Iglesias, M.; Viadero, F. Numerical evaluation of the accuracy in the load sharing calculation using strain gauges: Sun and ring gear tooth root. Mech. Mach. Theory 2022, 175, 104923. [Google Scholar] [CrossRef]
- Qu, Y.; Hong, L.; Jiang, X.; He, M.; He, D.; Tan, Y.; Zhou, Z. Experimental study of dynamic strain for gear tooth using fiber Bragg gratings and piezoelectric strain sensors. Sage J. 2018, 232, 3992–4003. [Google Scholar] [CrossRef]
- Rebbechi, B.; Oswald, F.B.; Townsend, D.P. Dynamic measurements of gear tooth friction and load. In Proceedings of the Fall Technical Meeting of the American Gear Manufactures Association, Detroit, MI, USA, 21–25 October 1991. NTRS-NASA Technical Reports Server. [Google Scholar]
- Naresh, K. Raghuwanshi, Anand Parey: Experimental measurement of gear mesh stiffness of cracked spur gear by strain gauge technique. Measurement 2016, 86, 266–275. [Google Scholar]
- Baud, R.V.; Peterson, R.E. Load and stress cycles in gear teeth. Mech. Eng. 1929, 51, 653–662. [Google Scholar]
- Xiao, J.; Guo, N.; Yan, S.; Sun, W.; Zhao, Y.; Liu, J. Comprehensive analysis method and application of gear squealing in commercial vehicle drive axles. Mech. Transm. 2022, 46, 141–146+160. [Google Scholar]
- Lu, H.; Zhang, J.; Pan, K.; Lv, C.; Hou, X.; Li, Z.; Zhang, H. Quasi-Static Transmission Error Measurement Using Micro-Deformation. Iran. J. Sci. Technol. Trans. Mech. Eng. 2023. [Google Scholar] [CrossRef]
- Wang, J.; Chen, F.; Li, P. Research on grounding technology in spacecraft comprehensive testing. Comput. Meas. Control 2010, 18, 246–248+271. [Google Scholar]
- Zhao, M.; Lin, J.; Wang, X.; Liao, Y. Dynamic transmission error analysis for a CNC machine tool based on built-in encoders. In Proceedings of the 2011 IEEE International Symposium on Assembly and Manufacturing (ISAM), Tampere, Finland, 25–27 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Yu, Y.; Ge, L.; Li, F.; Hu, C. Study on gamma spectrum wavelet noise reduction based on scintillation detector. J. Phys. Conf. Ser. 2021, 1941, 012027. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transfer Error Calculation Parameters | Parameter Value |
|---|---|
| Modulus of elasticity of gears E | 2 × 105 |
| Coefficient of use | 1 |
| Dynamic load factor | 1 |
| Intertooth load distribution factor | 1 |
| Toothwise load distribution factor | 1.4462 |
| Tooth profile coefficient | 2.81 |
| Stress concentration factor | 1.3357 |
| Helix angle coefficient | 1 |
| Gear mesh stiffness | 1.5 × 106 |
| Gear Parameters | Driving Gear | Driven Gear |
|---|---|---|
| Number of teeth | 53 | 37 |
| Modulus | 3 | 3 |
| Pressure angle | 20° | 20° |
| Tooth width | 12 mm | 12 mm |
| Shaft diameter | 20 mm | 20 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Lv, C.; Li, Z. Investigation of High-Speed Dynamic Transmission Error Testing Using Gear Strain. Machines 2023, 11, 956. https://doi.org/10.3390/machines11100956
Zhang J, Lv C, Li Z. Investigation of High-Speed Dynamic Transmission Error Testing Using Gear Strain. Machines. 2023; 11(10):956. https://doi.org/10.3390/machines11100956
Chicago/Turabian StyleZhang, Jian, Chuanmao Lv, and Zhengminqing Li. 2023. "Investigation of High-Speed Dynamic Transmission Error Testing Using Gear Strain" Machines 11, no. 10: 956. https://doi.org/10.3390/machines11100956
APA StyleZhang, J., Lv, C., & Li, Z. (2023). Investigation of High-Speed Dynamic Transmission Error Testing Using Gear Strain. Machines, 11(10), 956. https://doi.org/10.3390/machines11100956