
Trajectory Control Strategy and System Modeling of Load-Sensitive Hydraulic Excavator



Abstract
1. Introduction
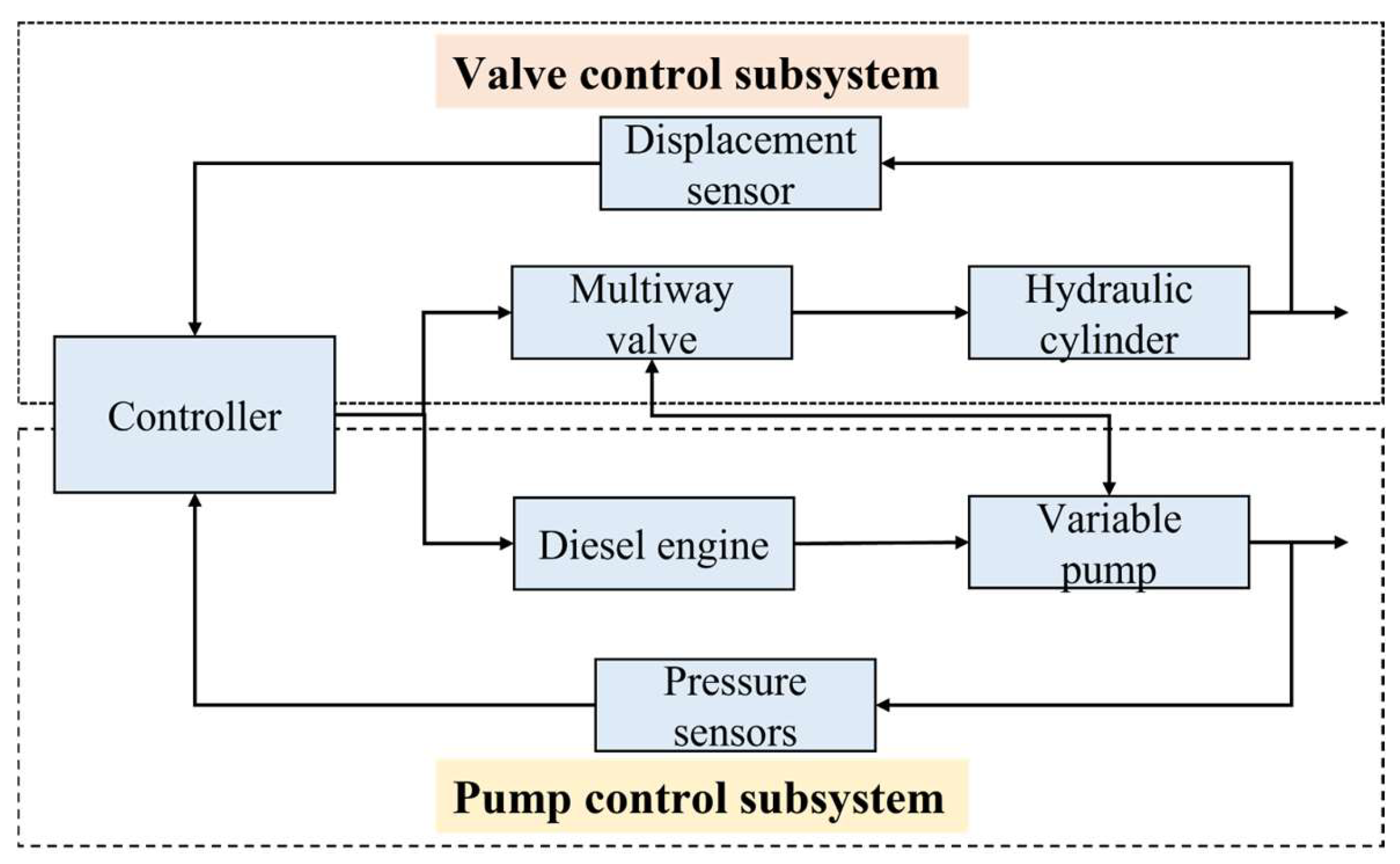
2. Hydraulic Excavator System Analysis
3. LS Excavator Systematic Modeling
3.1. Valve Control Subsystem Modeling
3.1.1. Joystick to Pilot Valve
3.1.2. Pilot Valve to Multiway Valve
3.1.3. Multiway Valve to Actuators
3.2. Pump Control Subsystem Modeling
3.2.1. Determining Load Pressure
3.2.2. to Load Sensitive Valve/Pressure Shutoff Valve
3.2.3. Control Piston Cylinder to Swash Plate
3.2.4. Swash Plate to Pump Displacement
4. HAQPSO-PID Controller Design
4.1. PID Controller
4.2. Quantum-Behaved Particle Swarm Optimization
4.3. Hybrid Adaptive Quantum-Behaved Particle Swarm Optimization
- (1)
- Improve search range
- (2)
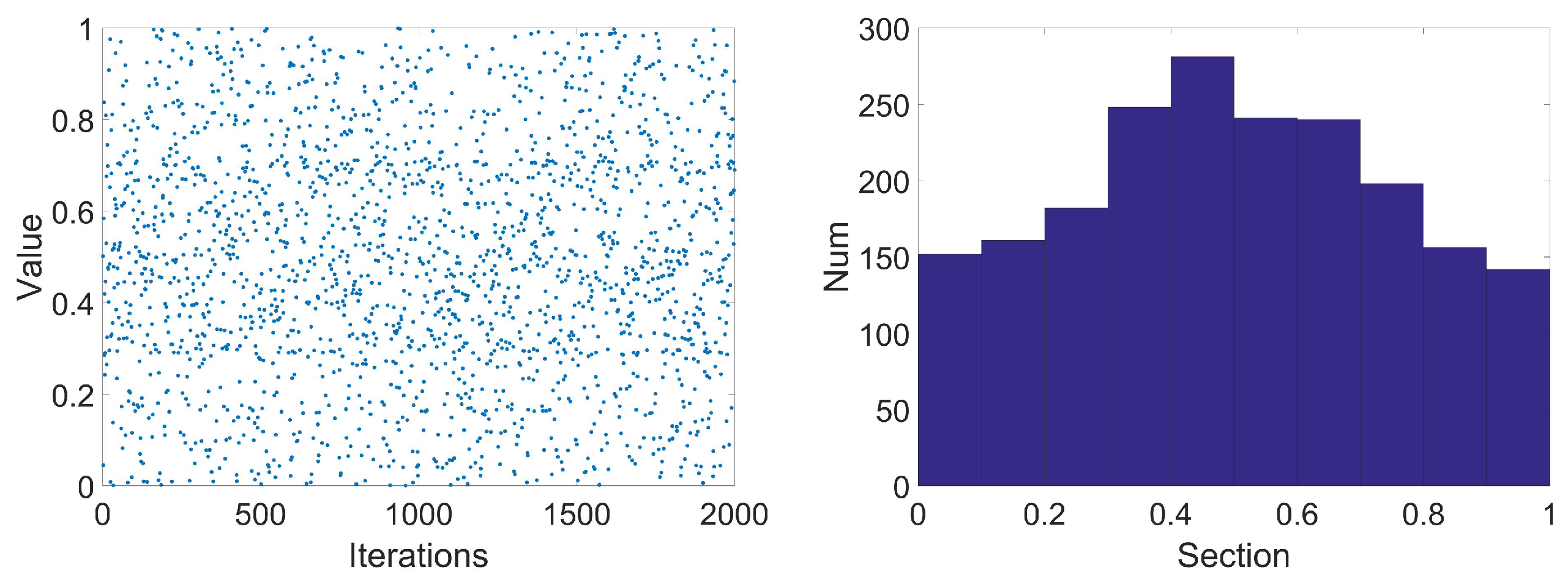
- Initialized population optimization based on improved circle chaotic mapping
- (3)
- Gaussian distribution variational operator
- (4)
- Adaptive weight φ
- (5)
- Dynamic adjustment of CE
| Algorithm HAQPSO Algorithm |
| 1: Initialization: population size, maximum iteration number. 2: Determine the initial particle population according to Equation (29). 3: While current number of iterations is less than the maximum number of iterations, 4: Calculate the fitness value of each particle according to Equation (34); 5: Calculate Pbest for each particle and Gbest for the swarm; 6: Calculate best position according to Equation (26); 7: Calculate according to Equations (23) and (32); 8: Calculate according to Equations (30) and (33); 9: Update the position for each particle according to Equation (31); 10: Current number of iterations = current number of iterations + 1; 11: Output: Optimum PID parameters. |
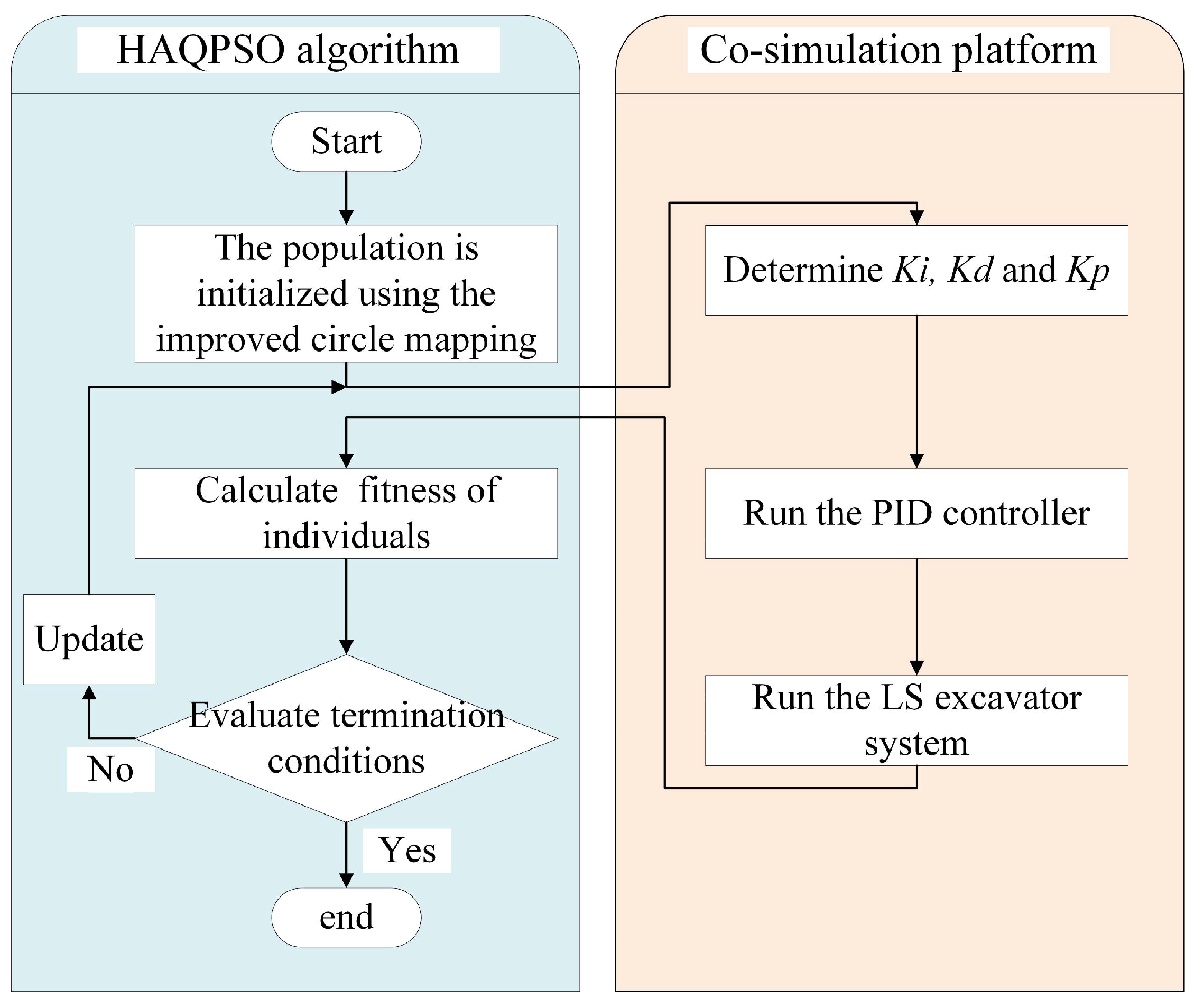
4.4. PID Parameter Tuning Based on HAQPSO
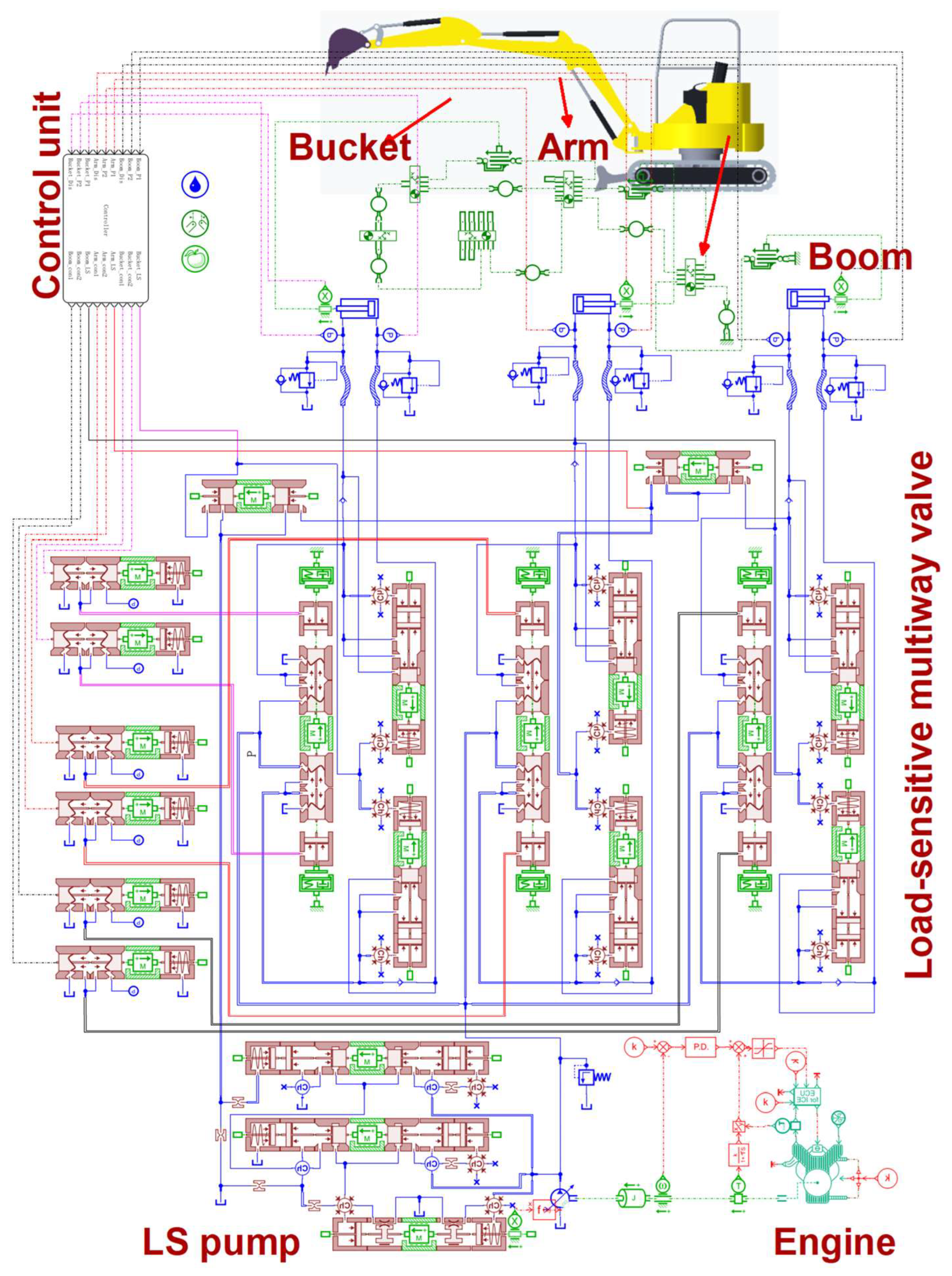
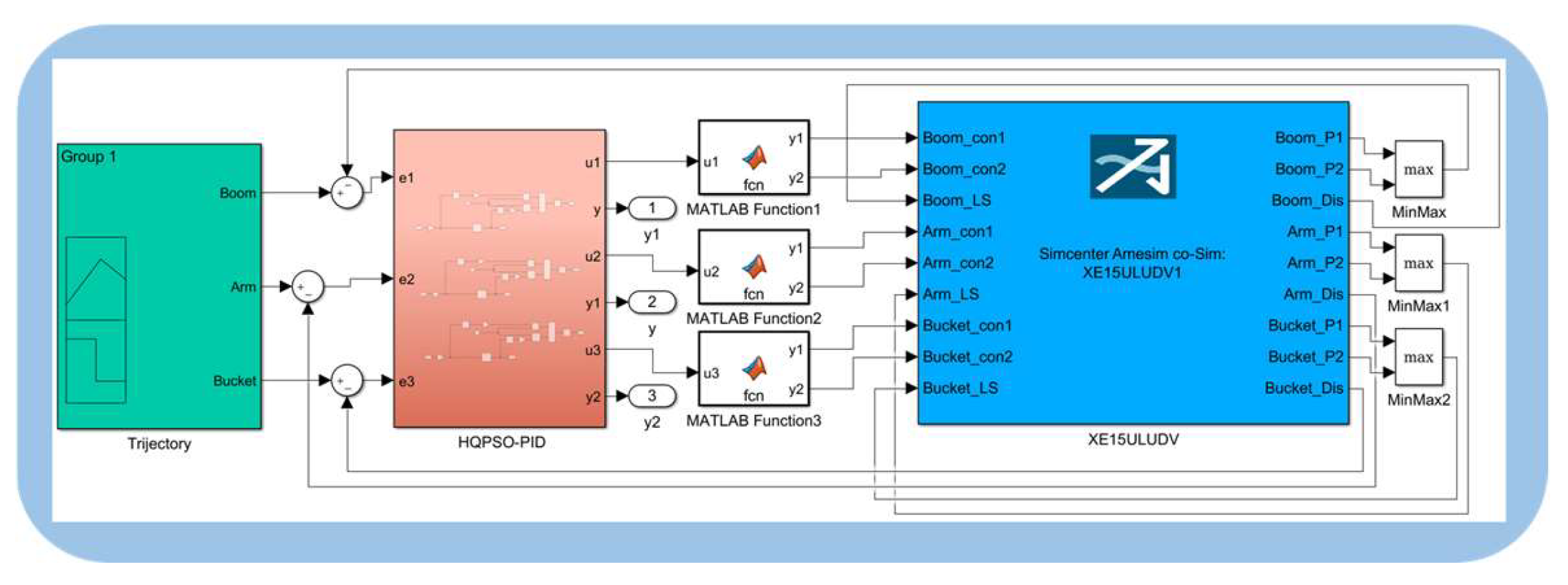
5. Hydraulic Excavator Co-simulation Platform
6. Experiment Results and Discussion
6.1. Performance Analysis of HAQPSO Performance
6.2. Simulation Model Validation
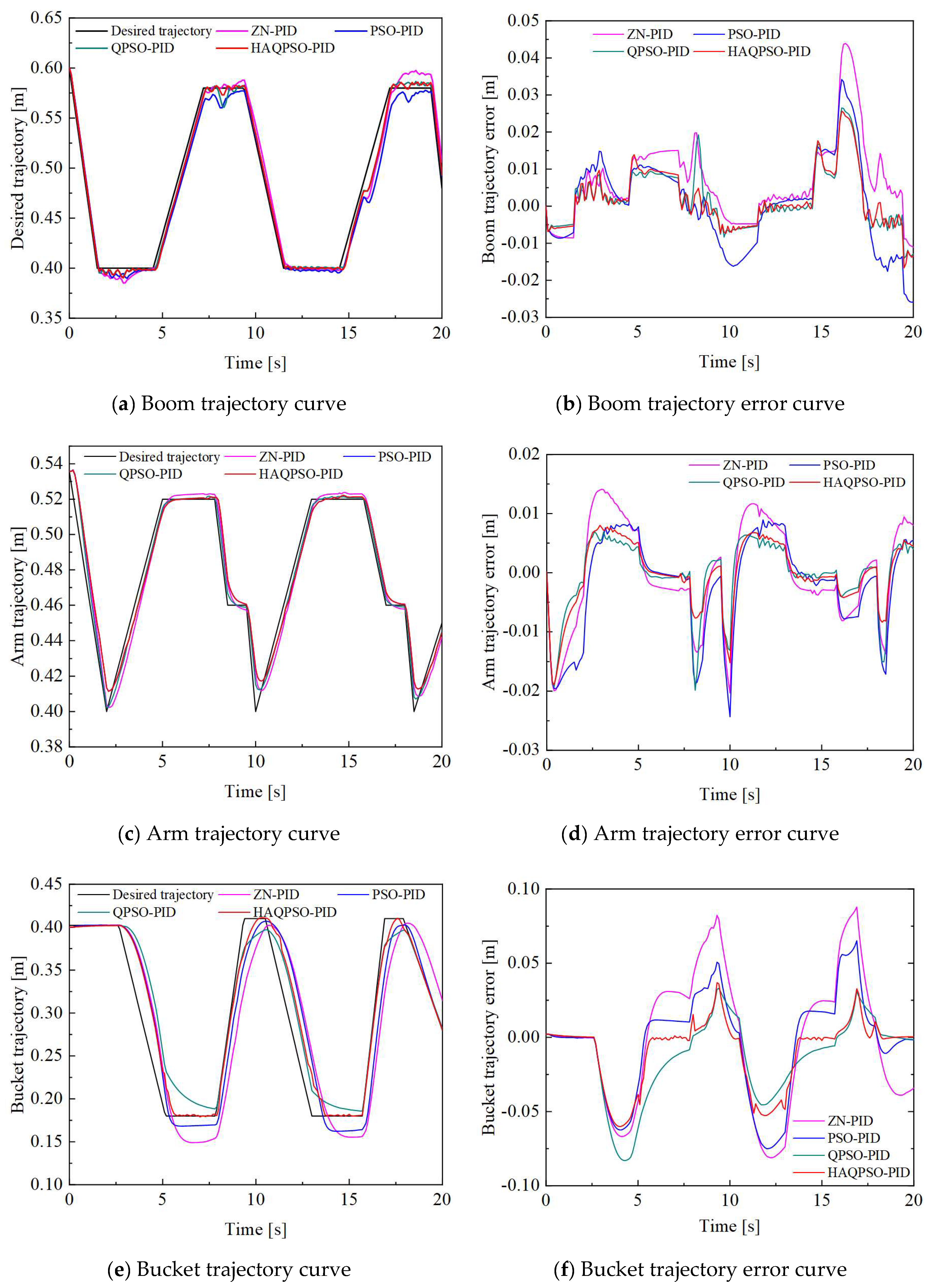
6.3. Trajectory Control Experiment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Do, T.C.; Dang, T.D.; Dinh, T.Q.; Ahn, K.K. Developments in energy regeneration technologies for hydraulic excavators: A review. Renew. Sustain. Energy Rev. 2021, 145, 111076. [Google Scholar] [CrossRef]
- Reginald, N.; Seo, J.; Cha, M. Integrative Tracking Control Strategy for Robotic Excavation. Int. J. Control Autom. Syst. 2021, 19, 3435–3450. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, Z.; Hammad, A. Automated excavators activity recognition and productivity analysis from construction site surveillance videos. Autom. Constr. 2020, 110, 103045. [Google Scholar] [CrossRef]
- Lee, C.S.; Bae, J.; Hong, D. Contour control for leveling work with robotic excavator. Int. J. Precis. Eng. Manuf. 2013, 14, 2055–2060. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J. Adaptive Fuzzy Sliding Mode Control Based on Pi-sigma Fuzzy Neutral Network for Hydraulic Hybrid Control System Using New Hydraulic Transformer. Int. J. Control Autom. Syst. 2019, 17, 1708–1716. [Google Scholar] [CrossRef]
- Zabihifar, S.H.; Yushchenko, A.S.; Navvabi, H. Robust control based on adaptive neural network for Rotary inverted pendulum with oscillation compensation. Neural Comput. Appl. 2020, 32, 14667–14679. [Google Scholar] [CrossRef]
- Kim, J.; Jin, M.; Choi, W.; Lee, J. Discrete time delay control for hydraulic excavator motion control with terminal sliding mode control. Mechatronics 2019, 60, 15–25. [Google Scholar] [CrossRef]
- Dao, H.V.; Na, S.; Nguyen, D.G.; Ahn, K.K. High accuracy contouring control of an excavator for surface flattening tasks based on extended state observer and task coordinate frame approach. Autom. Constr. 2021, 130, 103845. [Google Scholar] [CrossRef]
- Park, J.; Cho, D.; Kim, S.; Kim, Y.B.; Kim, P.Y.; Kim, H.J. Utilizing online learning based on echo-state networks for the control of a hydraulic excavator. Mechatronics 2014, 24, 986–1000. [Google Scholar] [CrossRef]
- Hua, H.; Fang, Y.; Zhang, X.; Qian, C. Auto-tuning nonlinear PID-type controller for rotorcraft-based aggressive transportation. Mech. Syst. Signal Process. 2020, 145, 106858. [Google Scholar] [CrossRef]
- Lui, D.G.; Petrillo, A.; Santini, S. An optimal distributed PID-like control for the output containment and leader-following of heterogeneous high-order multi-agent systems. Inf. Sci. 2020, 541, 166–184. [Google Scholar] [CrossRef]
- Zhang, S.; Minav, T.; Pietola, M.; Kauranne, H.; Kajaste, J. The effects of control methods on energy efficiency and position tracking of an electro-hydraulic excavator equipped with zonal hydraulics. Autom. Constr. 2019, 100, 129–144. [Google Scholar] [CrossRef]
- Do, T.C.; Tran, D.T.; Dinh, T.Q.; Ahn, K.K. Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller. Electronics 2020, 9, 926. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.-B.; Gong, Y.; Zhou, J.-J. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mech. Syst. Signal Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Feng, H.; Ma, W.; Yin, C.; Cao, D. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Autom. Constr. 2021, 127, 103722. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Zhao, J.; Zhao, J. The hybrid force/position anti-disturbance control strategy for robot abrasive belt grinding of aviation blade base on fuzzy PID control. Int. J. Adv. Manuf. Technol. 2021, 114, 3645–3656. [Google Scholar] [CrossRef]
- Cao, F. PID controller optimized by genetic algorithm for direct-drive servo system. Neural Comput. Appl. 2018, 32, 23–30. [Google Scholar] [CrossRef]
- Zhang, C.; Ding, S. A stochastic configuration network based on chaotic sparrow search algorithm. Knowl. Based Syst. 2021, 220, 106924. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-qaness, M.A.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Van den Bergh, F. An Analysis of Particle Swarm Optimizers. Ph.D. Thesis, University of Pretoria, Pretoria, South Africa, 2001. [Google Scholar]
- Shi, Y.; Li, W.; Lu, P.; Chen, F.; Qi, X.; Xiong, C. Research on hydraulic motor control system based on fuzzy neural network combing sliding mode control and time delay estimation. J. Intell. Fuzzy Syst. 2022, 43, 3815–3826. [Google Scholar] [CrossRef]
- Fu, S.; Wang, L.; Lin, T. Control of electric drive powertrain based on variable speed control in construction machinery. Autom. Constr. 2020, 119, 103281. [Google Scholar] [CrossRef]
- Nie, Z.Y.; Zhu, C.; Wang, Q.G.; Gao, Z.; Shao, H.; Luo, J.L. Design, analysis and application of a new disturbance rejection PID for uncertain systems. ISA Trans. 2020, 101, 281–294. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Xu, W.B.; Feng, B. A global search strategy of quantum-behaved particle swarm optimization. In Proceedings of the 2004 IEEE Conference of Cybernetics and Intelligent Systems, Singapore, 1–3 December 2004. [Google Scholar]
- Sun, J.; Fang, W.; Wu, X.J.; Palade, V.; Xu, W.B. Quantum-Behaved Particle Swarm Optimization: Analysis of Individual Particle Behavior and Parameter Selection. Evol. Comput. 2012, 20, 349–393. [Google Scholar] [CrossRef] [PubMed]
- Varol Altay, E.; Alatas, B. Bird swarm algorithms with chaotic mapping. Artif. Intell. Rev. 2019, 53, 1373–1414. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Fazzino, S.; Xibilia, M.G. Chaotic sequences to improve the performance of evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 289–304. [Google Scholar] [CrossRef]
- Arora, S.; Anand, P. Chaotic grasshopper optimization algorithm for global optimization. Neural Comput. Appl. 2018, 31, 4385–4405. [Google Scholar] [CrossRef]
- Xing, H.-Y.; Zhao, J.-Y.; Yin, X.; Ding, H.-G.; Meng, X.-Z.; Li, J.-S.; Wang, G.-Y. Simulated research on large-excavator boom based on hydraulic energy recovery. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 236, 10690–10700. [Google Scholar] [CrossRef]
- He, C.; Wang, J.; Wang, R.; Zhang, X. Research on the characteristics of hydraulic wind turbine with multi-accumulator. Renew. Energy 2021, 168, 1177–1188. [Google Scholar] [CrossRef]
- Wang, H.P.; Mustafa, G.I.Y.; Tian, Y. Model-free fractional-order sliding mode control for an active vehicle suspension system. Adv. Eng. Softw. 2018, 115, 452–461. [Google Scholar] [CrossRef]
- Chen, K.; Zhou, F.; Liu, A. Chaotic dynamic weight particle swarm optimization for numerical function optimization. Knowl. Based Syst. 2018, 139, 23–40. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary Programming Made Faster. IEEE Trans. Evol. Comput. 1999, 3, 82–88. [Google Scholar]
- Chen, S. Quantum-Behaved Particle Swarm Optimization with Weighted Mean Personal Best Position and Adaptive Local Attractor. Information 2019, 10, 22. [Google Scholar] [CrossRef]
- Feng, H.; Yin, C.-B.; Weng, W.-W.; Ma, W.; Zhou, J.-J.; Jia, W.-H.; Zhang, Z.-L. Robotic excavator trajectory control using an improved GA based PID controller. Mech. Syst. Signal Process. 2018, 105, 153–168. [Google Scholar] [CrossRef]
- Coelho, L.S. Novel Gaussian quantum-behaved particle swarm optimiser applied to electromagnetic design. IET Sci. Meas. Technol. 2007, 1, 290–294. [Google Scholar] [CrossRef]
- Sun, J.; Wu, X.; Palade, V.; Fang, W.; Lai, C.-H.; Xu, W. Convergence analysis and improvements of quantum-behaved particle swarm optimization. Inf. Sci. 2012, 193, 81–103. [Google Scholar] [CrossRef]
- Tian, N.; Lai, C.-H. Parallel quantum-behaved particle swarm optimization. Int. J. Mach. Learn. Cybern. 2013, 5, 309–318. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Oil density | 850 | kg/m3 |
| Oil bulk modulus | 17,000 | bar |
| Engine speed | 2300 | r/min |
| Pump maximum displacement | 34 | cc/rev |
| Pump volumetric efficiency | 0.92 | |
| Pump hydraulic–mechanical efficiency | 0.96 | |
| Relief valve cracking pressure | 270 | bar |
| Pressure compensation valve piston diameter | 10 | mm |
| Pressure compensation valve rod diameter | 5 | mm |
| Spring force at zero displacement | 37.8 | N |
| Spring rate | 20 | N/mm |
| Coefficient of pressure compensating valve viscous friction | 50 | N/m/s |
| Cylinder leakage coefficient | 0.01 | L/min/bar |
| Piston diameter of the boom hydraulic cylinder | 74 | mm |
| Rod diameter of boom hydraulic cylinder | 34 | mm |
| Travel of boom hydraulic cylinder | 650 | mm |
| Boom mass | 60.94 | kg |
| Moment of boom inertia | 1245.46 | kg/m2 |
| Piston diameter of the arm hydraulic cylinder | 70 | mm |
| Rod diameter of arm hydraulic cylinder | 34 | mm |
| Travel of arm hydraulic cylinder | 503 | mm |
| Arm mass | 28.38 | kg |
| Moment of arm inertia | 127.57 | kg/m2 |
| Piston diameter of the bucket hydraulic cylinder | 75 | mm |
| Rod diameter of bucket hydraulic cylinder | 34 | mm |
| Travel of bucket hydraulic cylinder | 410 | mm |
| Bucket mass | 16.55 | kg |
| Moment of Bucket inertia | 29.32 | kg/m2 |
| Name | Function Expression | Search Domain | Initial Range |
|---|---|---|---|
| Sphere | [−100, 100]n | [50, 100] | |
| Rosenbrock | [−30, 30]n | [15, 30] | |
| Rastrigin | [−5.12, 5.12]n | [2.56, 5.12] | |
| Ackley | [−32, 32]n | [16, 32] |
| N | D | T | Algorithm | ||
|---|---|---|---|---|---|
| PSO | QPSO | HAQPSO | |||
| 20 | 10 | 1000 | 2.4332 × 10−6 | 3.2146 × 10−28 | 1.1313 × 10−43 |
| 30 | 1500 | 9.8434 × 10−4 | 6.5730 × 10−17 | 7.047 × 10−17 | |
| 50 | 2000 | 5.9672 × 10−3 | 5.6147 × 10−5 | 1.6556 × 10−7 | |
| 50 | 10 | 1000 | 5.4372 × 10−10 | 4.4054 × 10−35 | 1.2969 × 10−60 |
| 30 | 1500 | 2.7452 × 10−7 | 1.0317 × 10−23 | 2.0601 × 10−43 | |
| 50 | 2000 | 4.6132 × 10−4 | 1.9244 × 10−8 | 1.8286 × 10−19 | |
| 80 | 10 | 1000 | 1.2378 × 10−12 | 4.4054 × 10−46 | 1.5692 × 10−97 |
| 30 | 1500 | 2.0232 × 10−4 | 2.1565 × 10−24 | 2.1925 × 10−52 | |
| 50 | 2000 | 8.4451 × 10−2 | 1.6424 × 10−11 | 1.8021 × 10−25 | |
| N | D | T | Algorithm | ||
|---|---|---|---|---|---|
| PSO | QPSO | HAQPSO | |||
| 20 | 10 | 1000 | 16.0366 | 15.4821 | 8.5116 |
| 30 | 1500 | 46.2074 | 47.8458 | 37.3123 | |
| 50 | 2000 | 156.7582 | 104.8860 | 82.8742 | |
| 50 | 10 | 1000 | 3.9565 | 5.1495 | 2.9243 |
| 30 | 1500 | 36.6328 | 45.4307 | 23.2881 | |
| 50 | 2000 | 54.7541 | 49.9782 | 34.9334 | |
| 80 | 10 | 1000 | 3.9058 | 3.8884 | 2.5978 |
| 30 | 1500 | 32.7823 | 45.9152 | 16.8176 | |
| 50 | 2000 | 47.9091 | 45.9244 | 28.0241 | |
| N | D | T | Algorithm | ||
|---|---|---|---|---|---|
| PSO | QPSO | HAQPSO | |||
| 20 | 10 | 1000 | 8.6263 | 6.3694 | 5.1833 |
| 30 | 1500 | 26.8967 | 22.3258 | 12.3823 | |
| 50 | 2000 | 41.4143 | 28.7685 | 22.2701 | |
| 50 | 10 | 1000 | 4.0992 | 3.7285 | 2.4873 |
| 30 | 1500 | 31.3259 | 23.4073 | 22.3915 | |
| 50 | 2000 | 35.8055 | 24.8728 | 18.7974 | |
| 80 | 10 | 1000 | 3.2351 | 2.3979 | 1.9899 |
| 30 | 1500 | 12.4536 | 8.6923 | 9.5942 | |
| 50 | 2000 | 25.6276 | 17.7753 | 16.3971 | |
| N | D | T | Algorithm | ||
|---|---|---|---|---|---|
| PSO | QPSO | HAQPSO | |||
| 20 | 10 | 1000 | 5.6949 × 10−4 | 1.4460 × 10−14 | 4.4409 × 10−15 |
| 30 | 1500 | 0.0369 | 0.0061 | 9.4508 × 10−8 | |
| 50 | 2000 | 0.0985 | 0.6591 | 2.8150 × 10−4 | |
| 50 | 10 | 1000 | 2.1999 × 10−6 | 1.5099 × 10−14 | 5.0804 × 10−15 |
| 30 | 1500 | 0.0059 | 3.1556 × 10−7 | 1.9984 × 10−13 | |
| 50 | 2000 | 0.0254 | 0.0057 | 1.5727 × 10−9 | |
| 80 | 10 | 1000 | 8.1035 × 10−8 | 4.5409 × 10−15 | 4.4119 × 10−15 |
| 30 | 1500 | 0.0016 | 9.3718 × 10−12 | 1.5099 × 10−14 | |
| 50 | 2000 | 0.0097 | 3.2142 × 10−5 | 1.4255 × 10−12 | |
| Kp | Ki | Kd | |
|---|---|---|---|
| Boom | 23.28 | 6.48 | 3.63 |
| Arm | 21.96 | 5.37 | 2.17 |
| Bucket | 19.64 | 5.89 | 2.48 |
| Parameter | PSO-PID | QPSO-PID | HAQPSO-PID |
|---|---|---|---|
| Population size | 30 | 30 | 30 |
| Maximum iteration number | 100 | 100 | 100 |
| Search range of Kp | [0, 40] | [0, 40] | / |
| Search range of Ki | [0, 10] | [0, 10] | / |
| Search range of Kd | [0, 10] | [0, 10] | / |
| Learning coefficient 1 | 2 | / | / |
| Learning coefficient 2 | 2 | / | / |
| [Vmin Vmax] | [0, 0.9] | / | / |
| Inertia weight | 0.6 | / | / |
| 0.999 | 0.999 | 0.999 | |
| 0.001 | 0.001 | 0.001 |
| Tuning Method | Indicator | Boom | Arm | Bucket |
|---|---|---|---|---|
| PSO-PID | Best J | 22.19 | 19.84 | 26.13 |
| Number of iterations | 62 | 59 | 64 | |
| Kp | 21.08 | 20.63 | 23.09 | |
| Ki | 5.53 | 4.17 | 3.24 | |
| Kd | 3.73 | 3.96 | 4.35 | |
| QPSO-PID | Best J | 21.99 | 19.64 | 25.62 |
| Number of iterations | 43 | 51 | 65 | |
| Kp | 22.61 | 21.57 | 21.83 | |
| Ki | 4.62 | 6.75 | 5.79 | |
| Kd | 4.18 | 3.37 | 2.35 | |
| HQPSO-PID | Best J | 21.51 | 19.37 | 24.79 |
| Number of iterations | 27 | 38 | 57 | |
| Kp | 22.34 | 19.98 | 22.73 | |
| Ki | 6.97 | 8.34 | 4.52 | |
| Kd | 4.47 | 4.69 | 3.65 |
| Methods | RMSE | ||
|---|---|---|---|
| Boom | Arm | Bucket | |
| ZN-PID | 12.9459 | 10.2999 | 44.9140 |
| PSO-PID | 10.0977 | 9.6542 | 34.3970 |
| QPSO-PID | 8.3153 | 7.7642 | 29.6588 |
| HAQPSO-PID | 8.1798 | 6.6442 | 24.8488 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Li, G.; Li, Z.; Xiong, X. Trajectory Control Strategy and System Modeling of Load-Sensitive Hydraulic Excavator. Machines 2023, 11, 10. https://doi.org/10.3390/machines11010010
Song H, Li G, Li Z, Xiong X. Trajectory Control Strategy and System Modeling of Load-Sensitive Hydraulic Excavator. Machines. 2023; 11(1):10. https://doi.org/10.3390/machines11010010
Chicago/Turabian StyleSong, Haoju, Guiqin Li, Zhen Li, and Xin Xiong. 2023. "Trajectory Control Strategy and System Modeling of Load-Sensitive Hydraulic Excavator" Machines 11, no. 1: 10. https://doi.org/10.3390/machines11010010
APA StyleSong, H., Li, G., Li, Z., & Xiong, X. (2023). Trajectory Control Strategy and System Modeling of Load-Sensitive Hydraulic Excavator. Machines, 11(1), 10. https://doi.org/10.3390/machines11010010