






Transmission Parameter Design and Characteristic Analysis of Three-Row Parallel Planetary Gear HMCVT

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
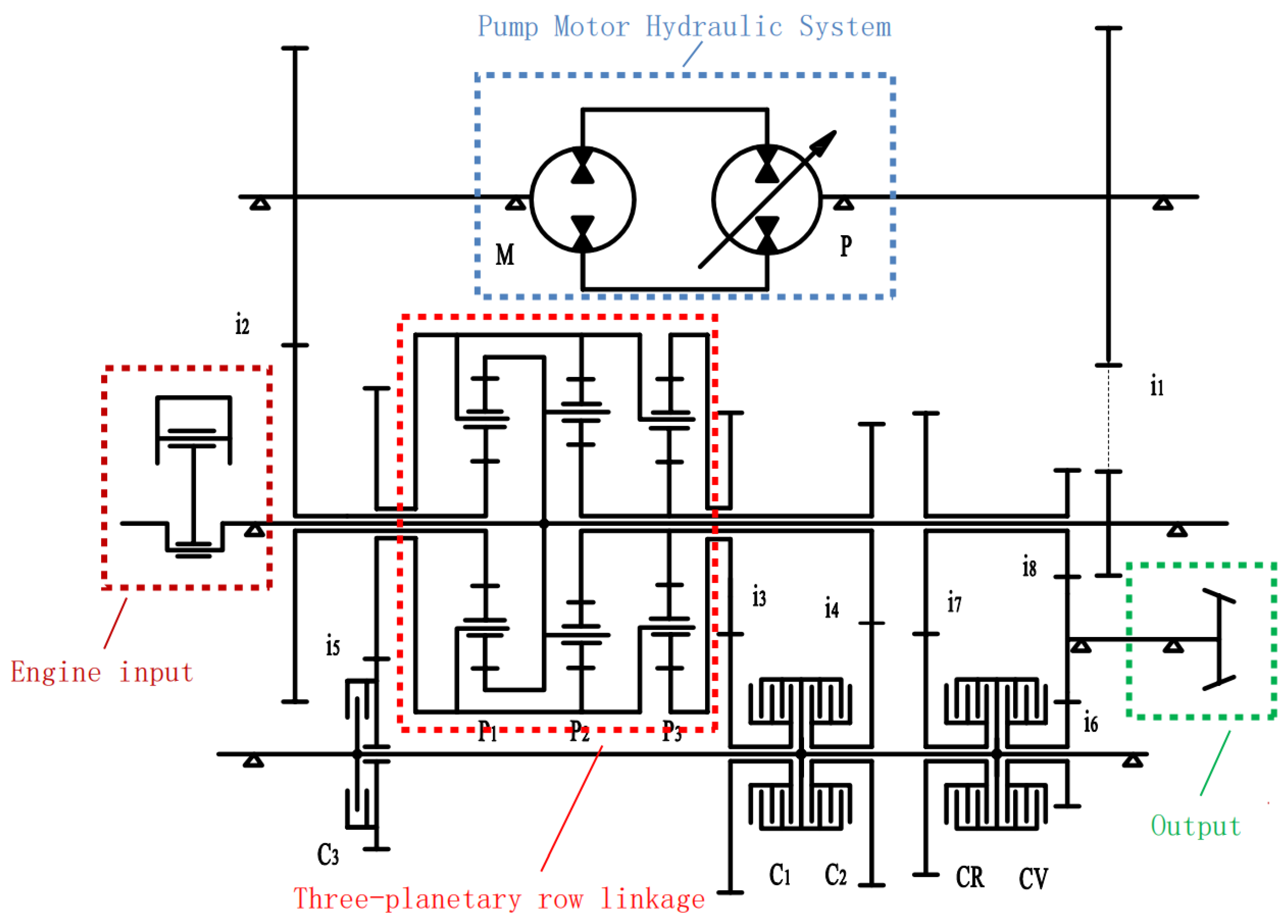
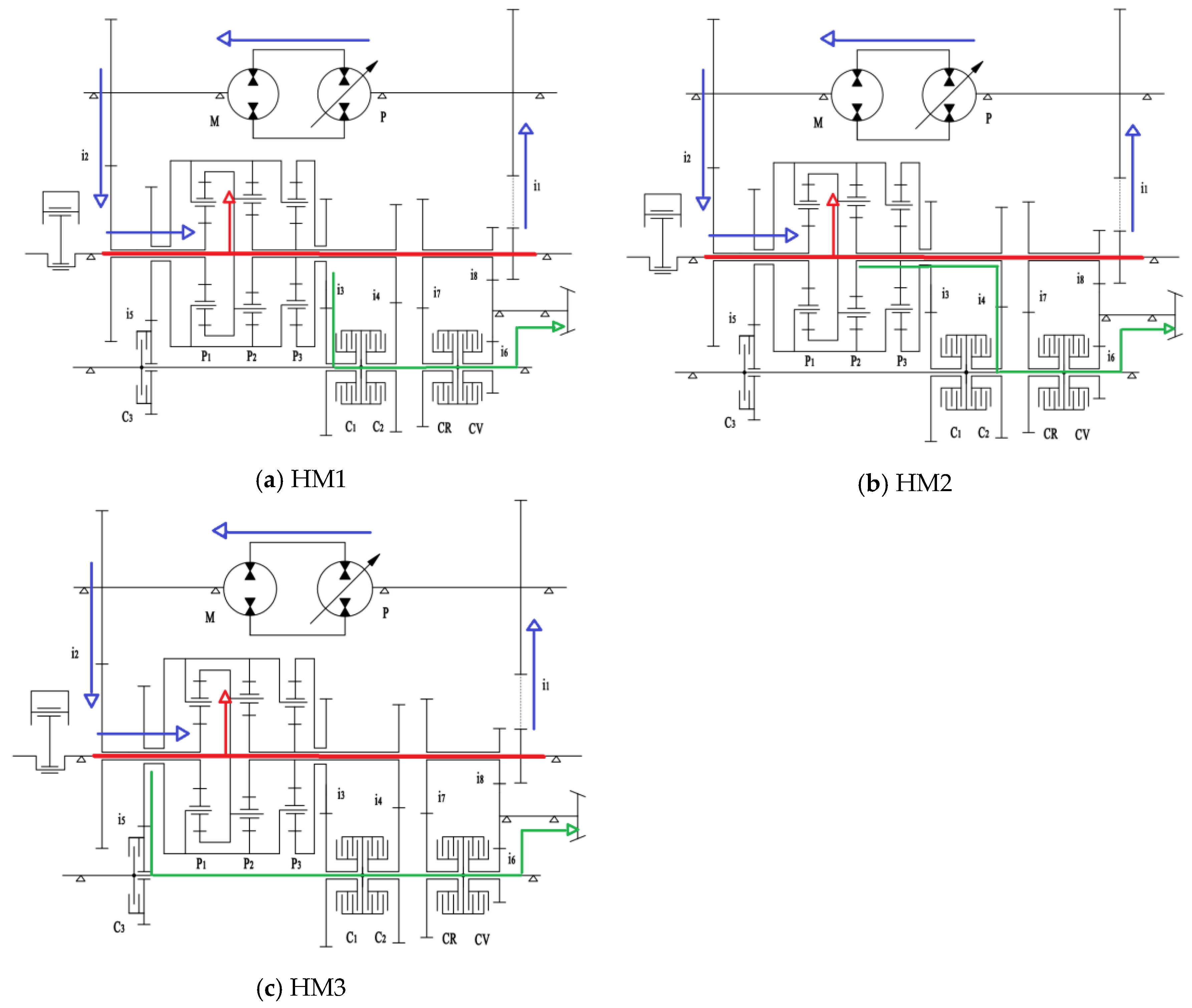
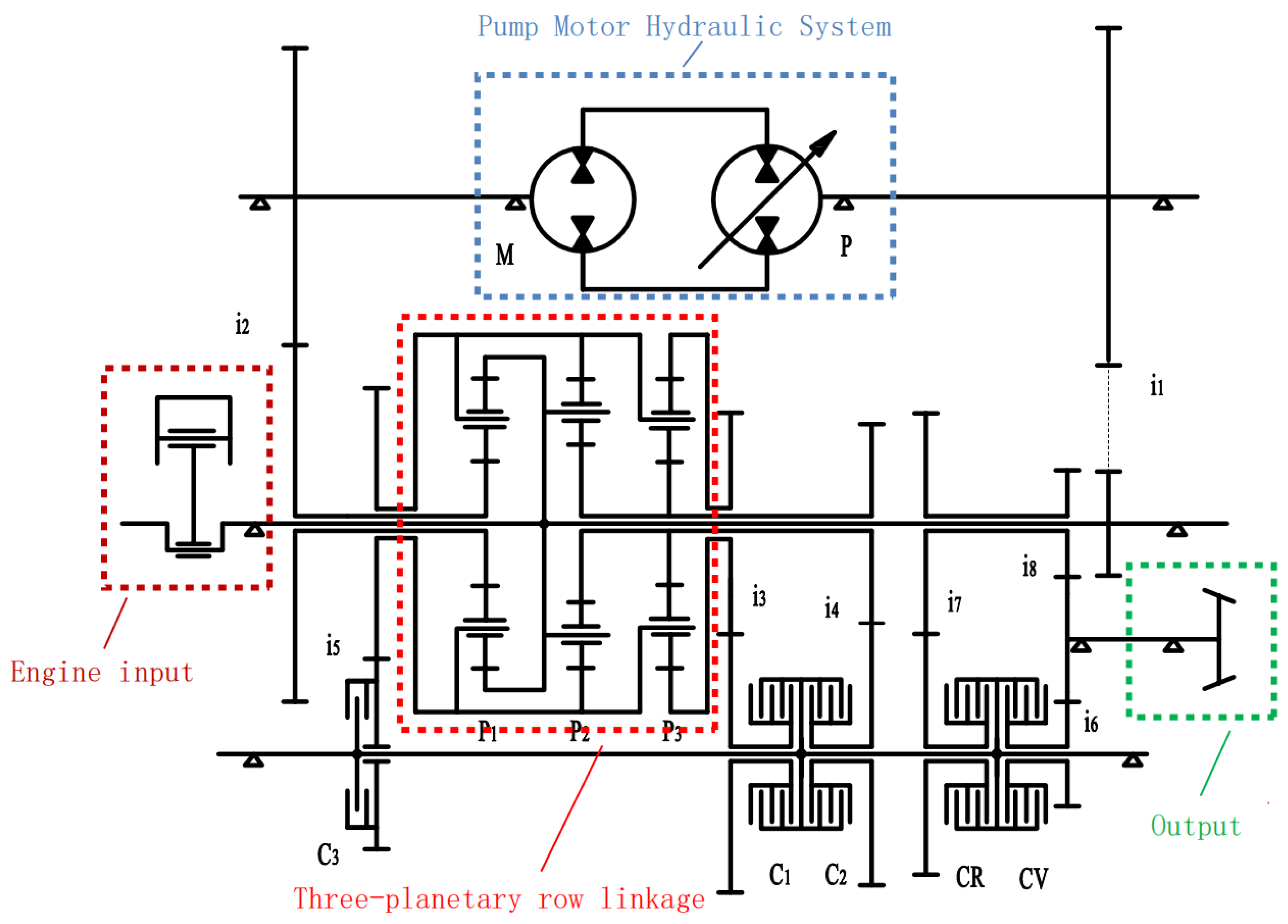
2.1. Three-Planetary-Row Manifold Scheme Design
2.2. Design of HMCVT Transmission Parameters
3. Results and Discussion
3.1. Results of Stepless Speed-Regulation Characteristics
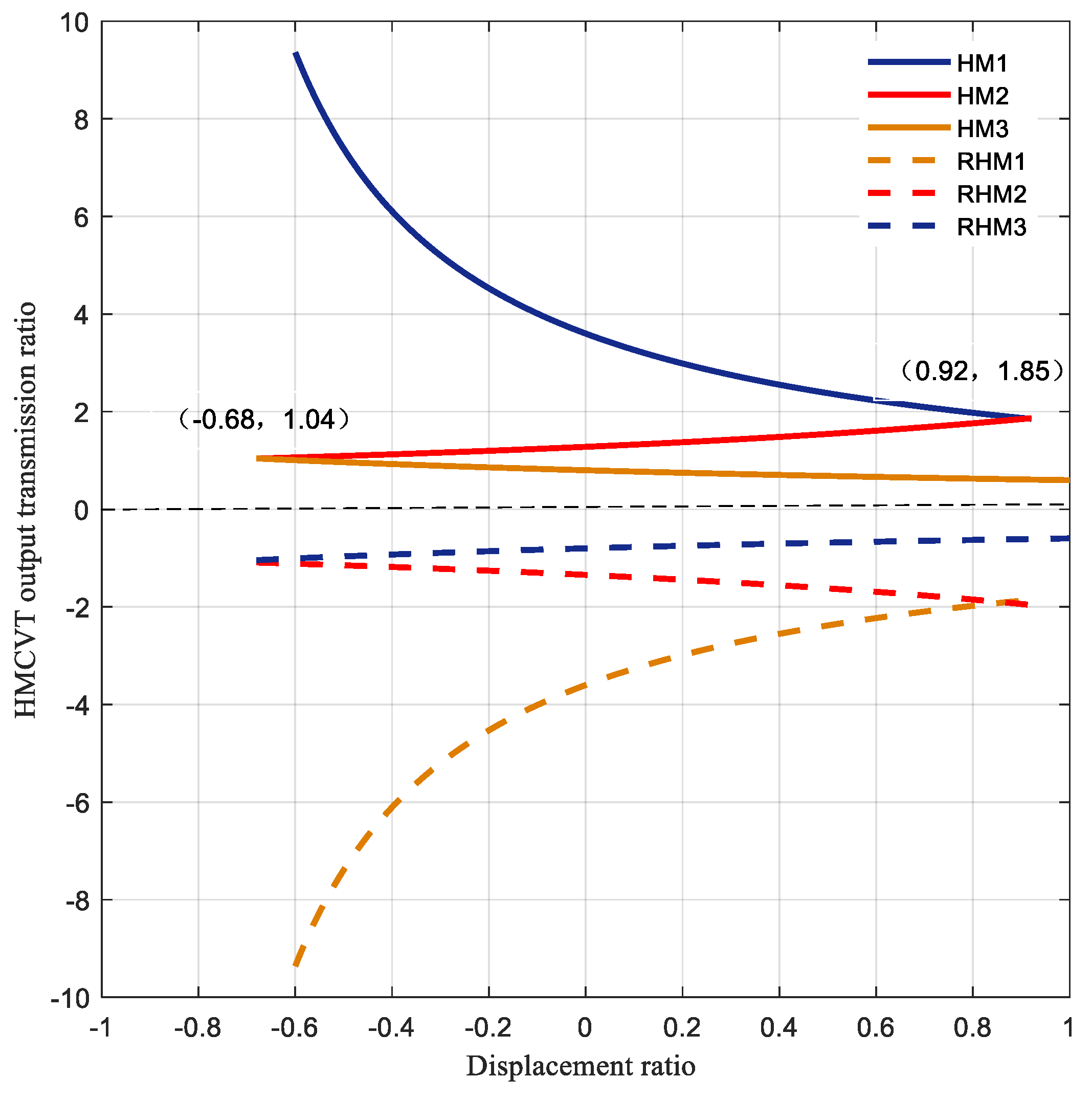
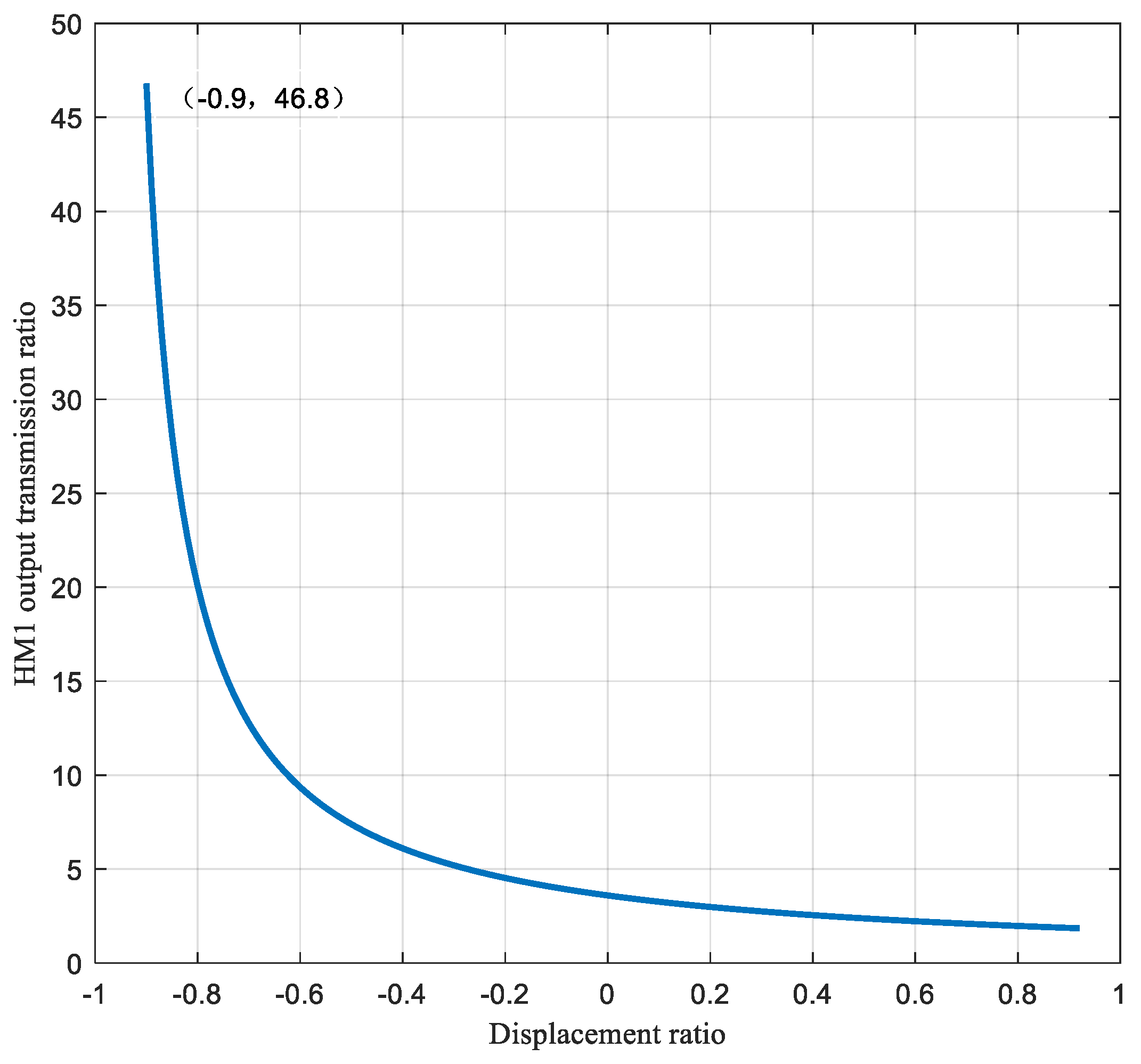
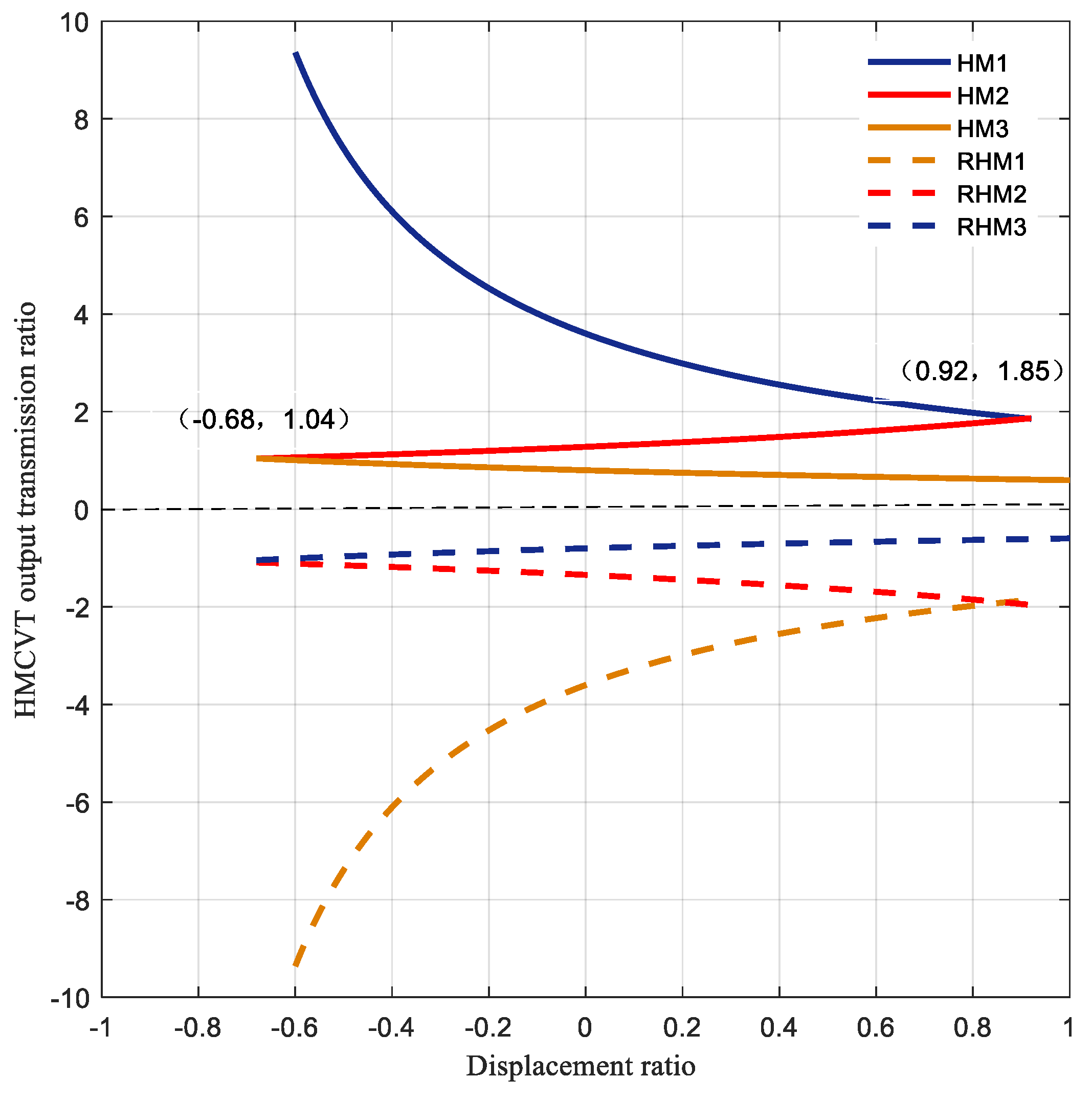
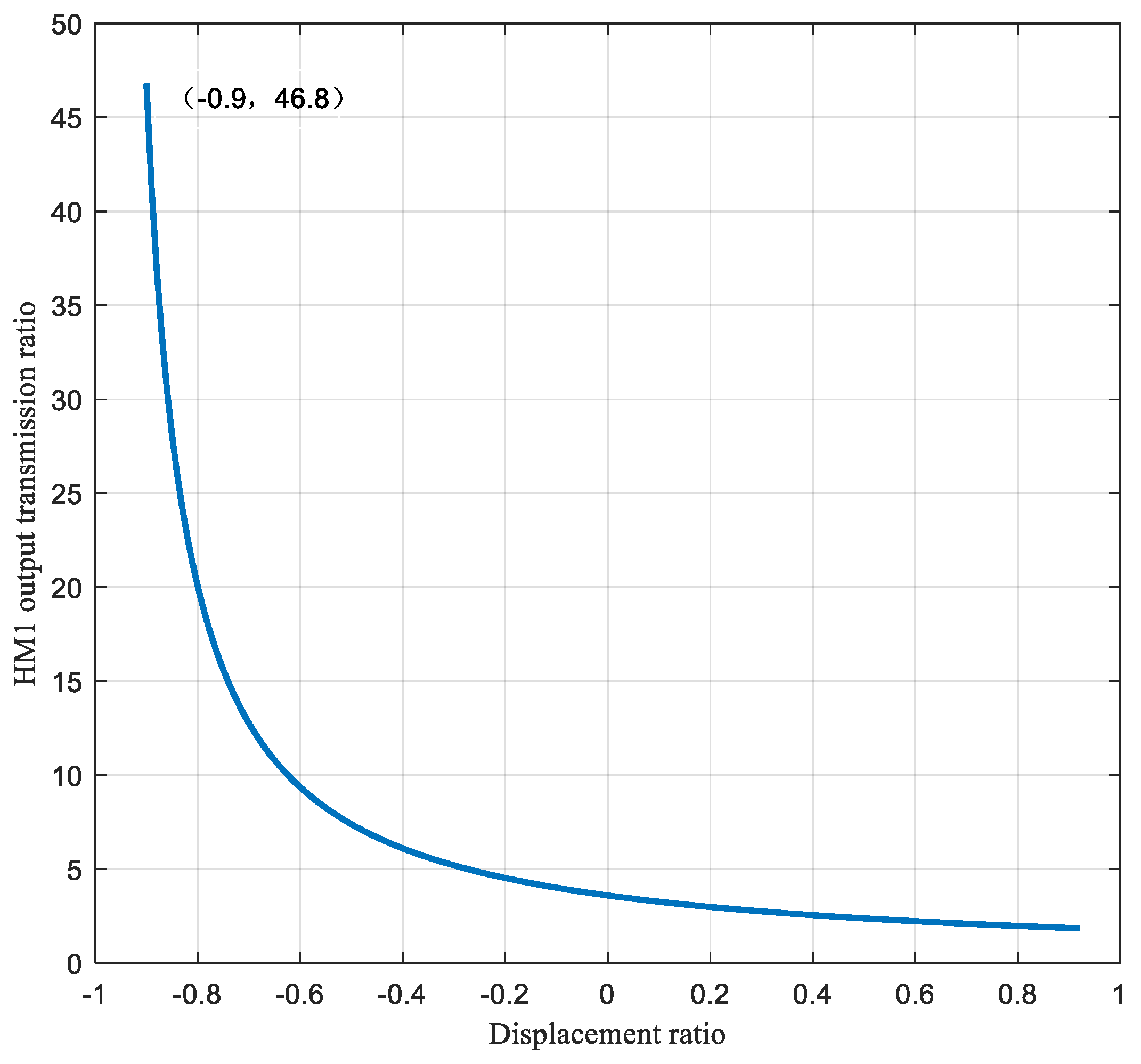
3.1.1. Transmission Ratio Characteristic Analysis Results
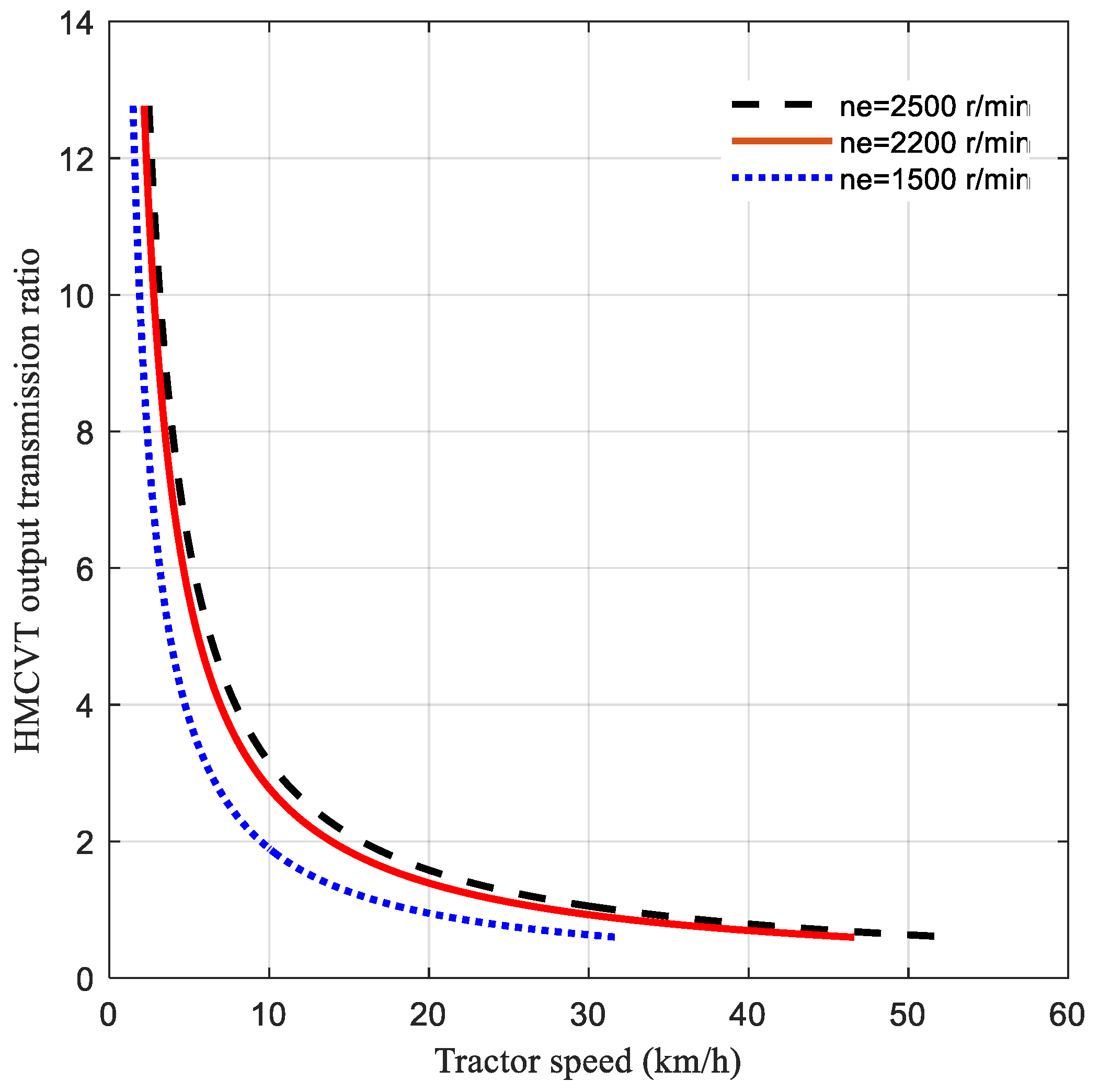
3.1.2. Speed Characteristic Results
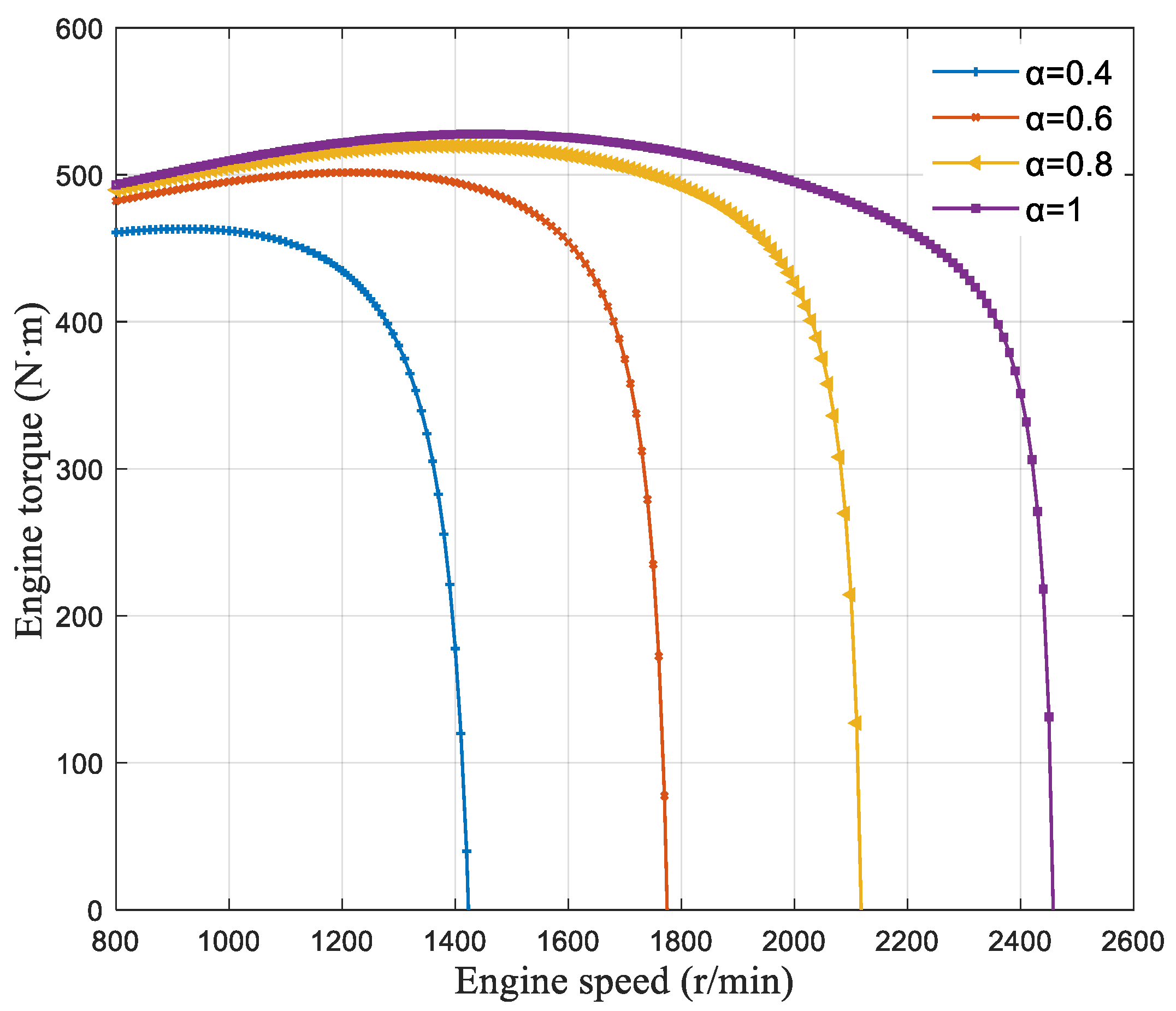
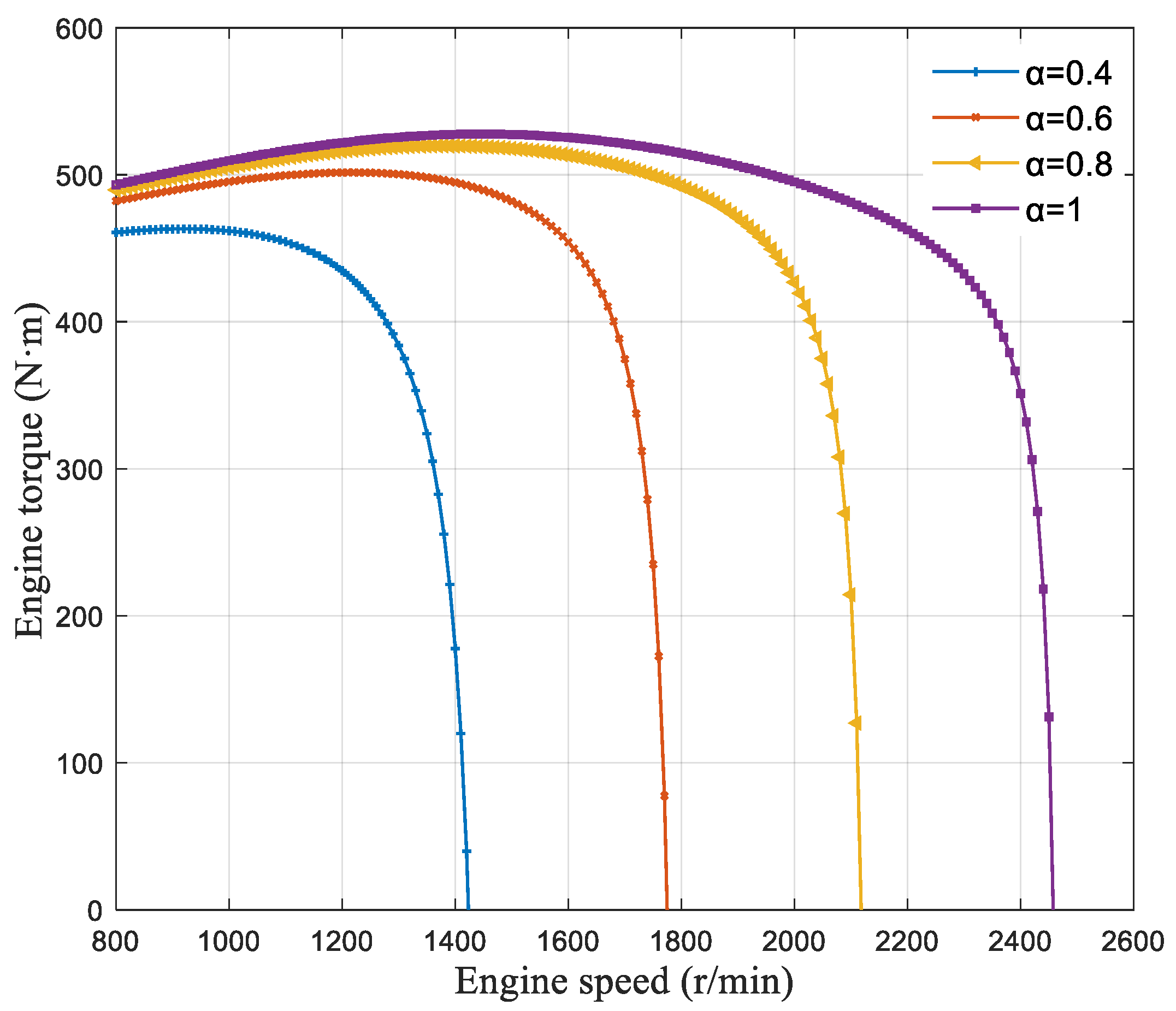
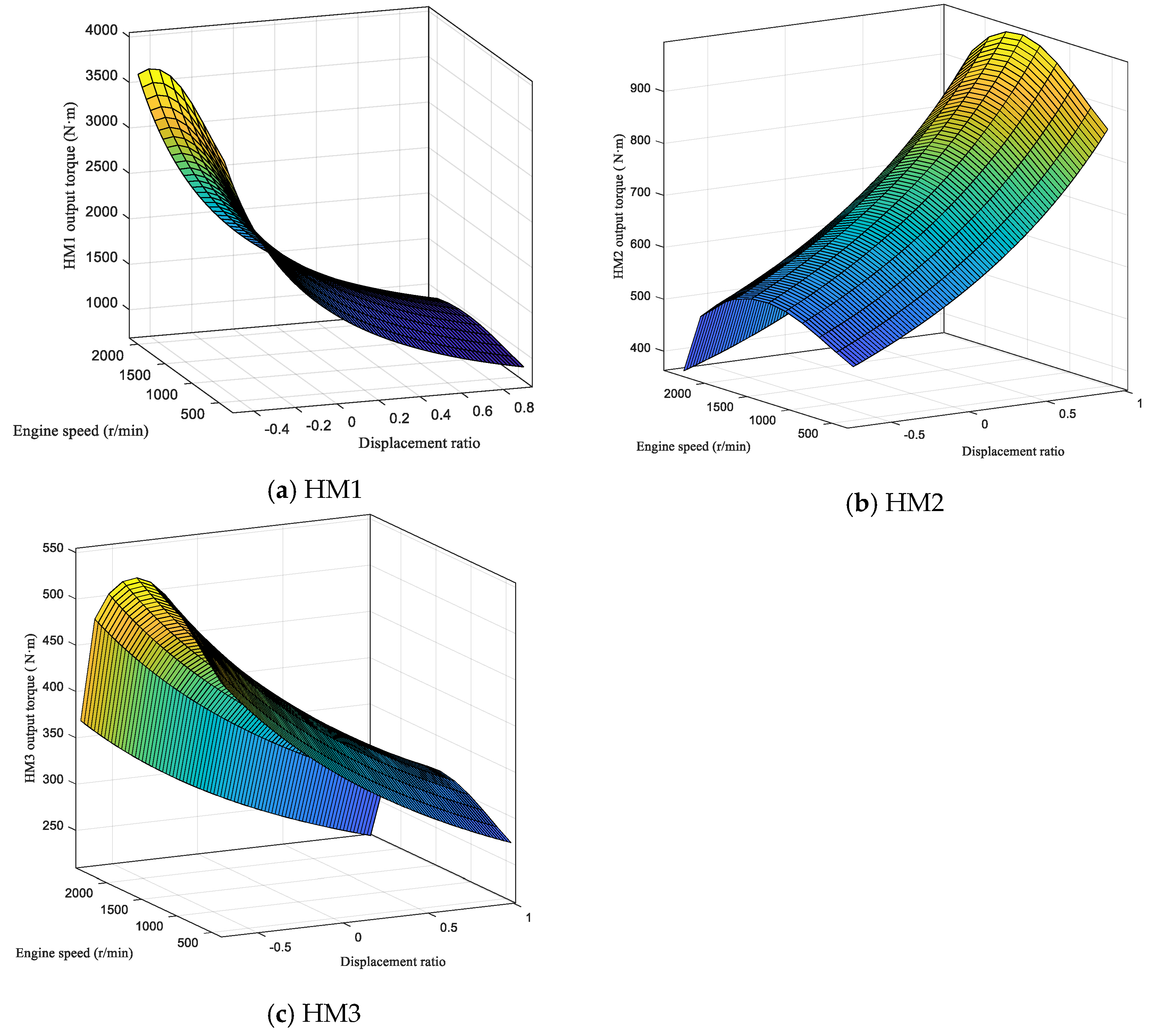
3.2. Results of Torque Characteristics
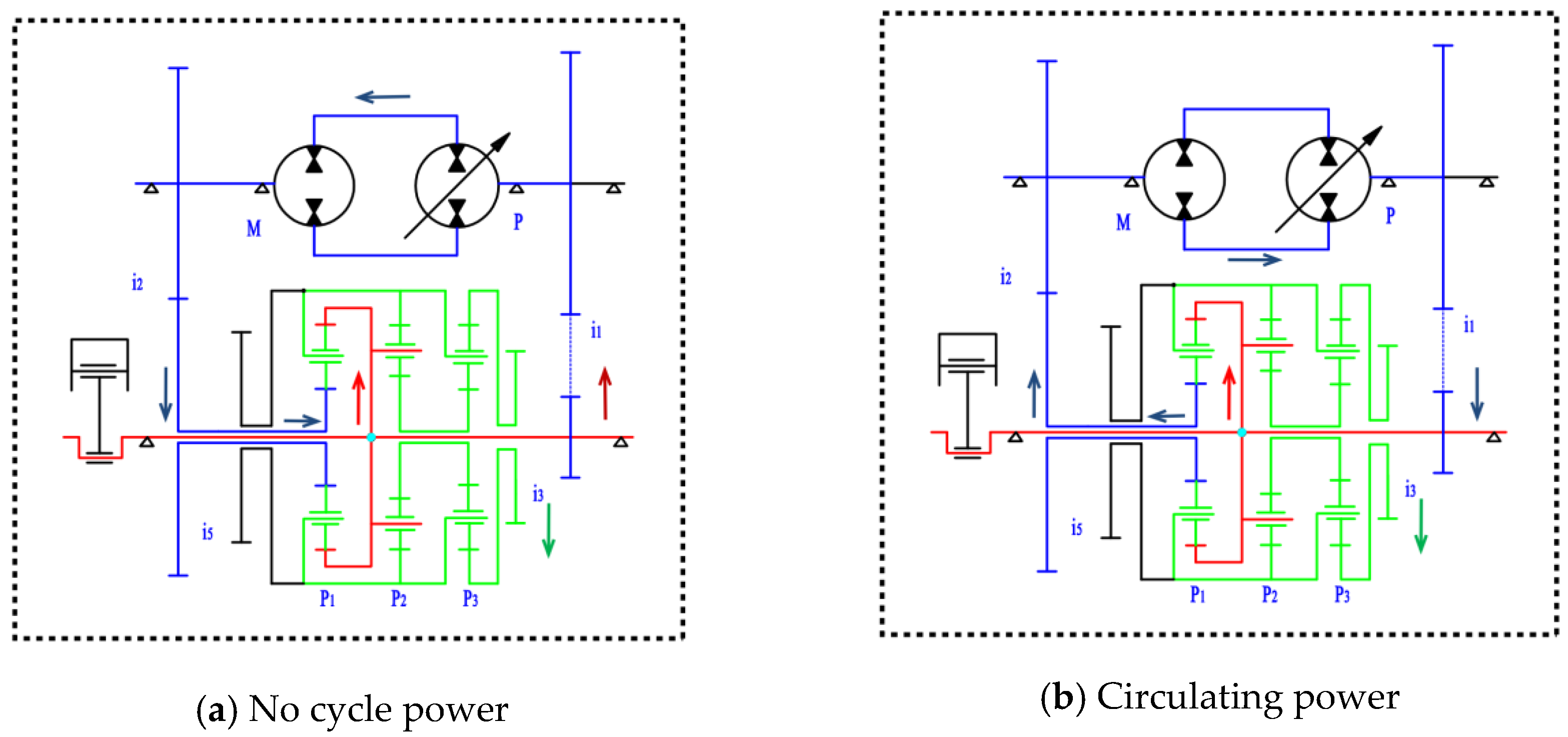
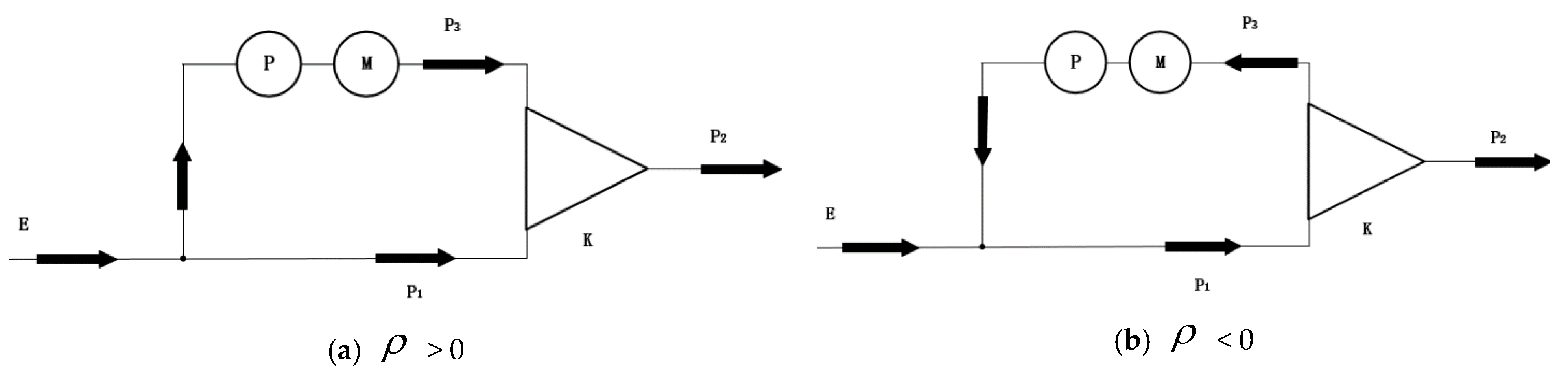
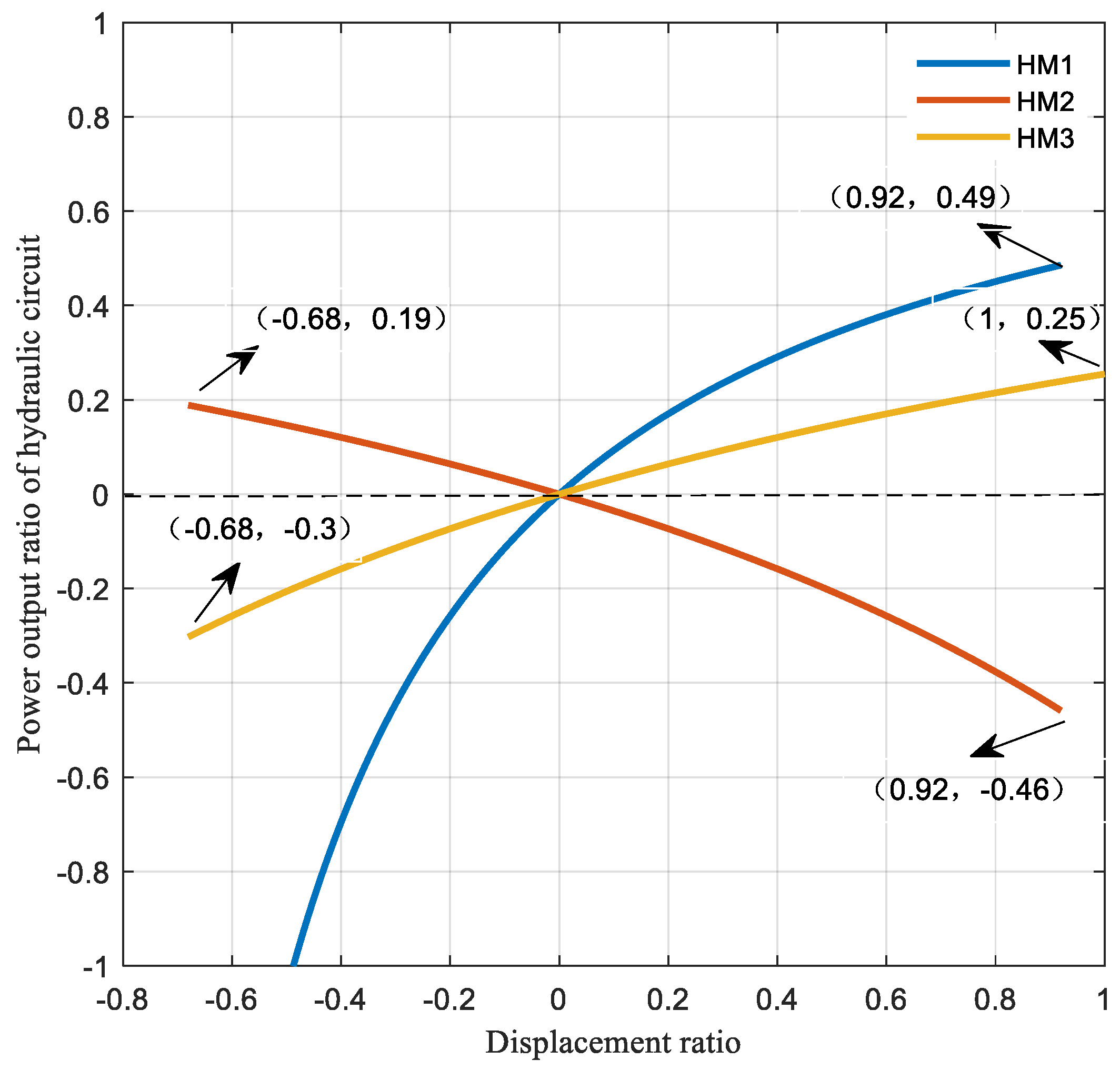
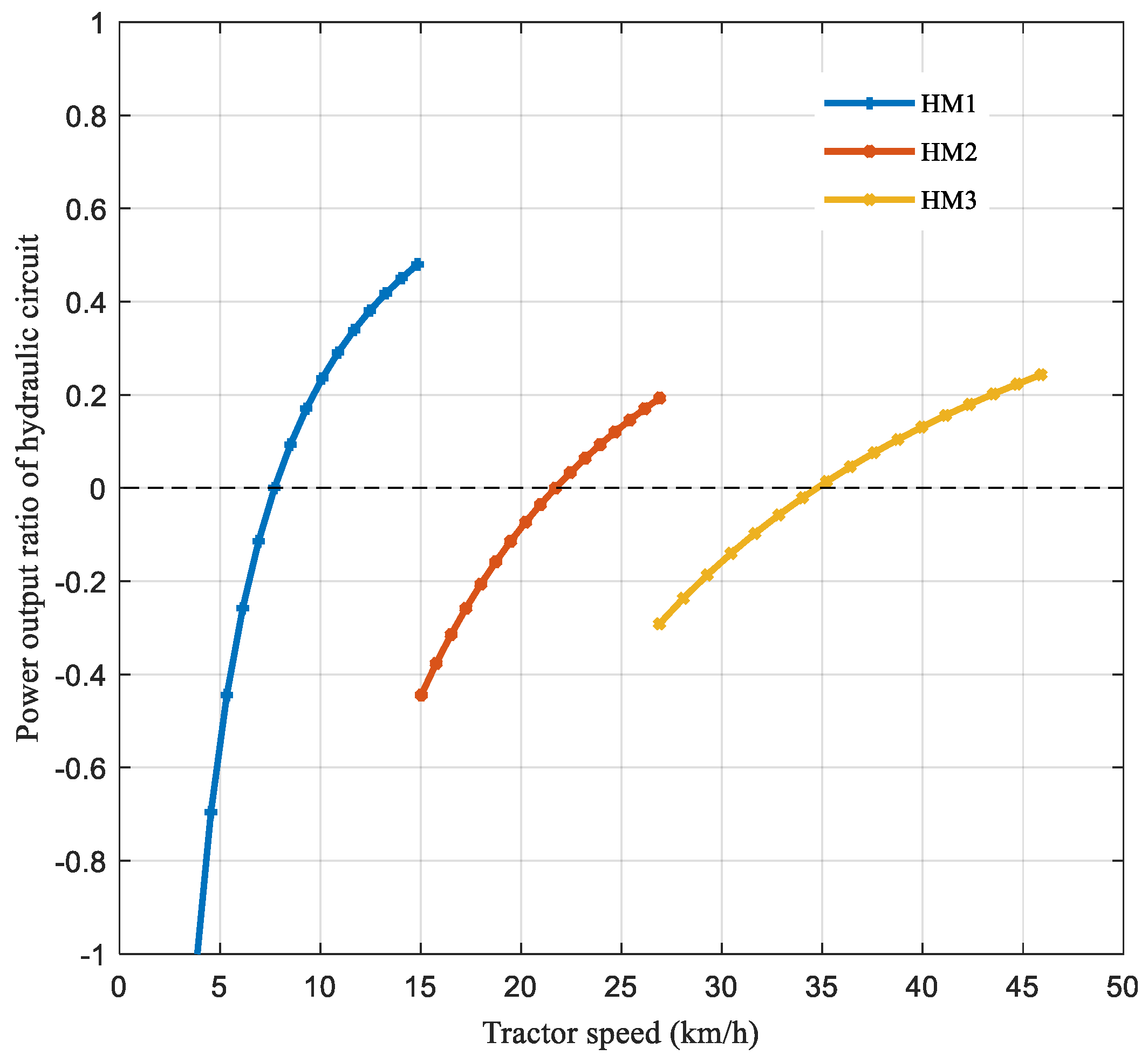
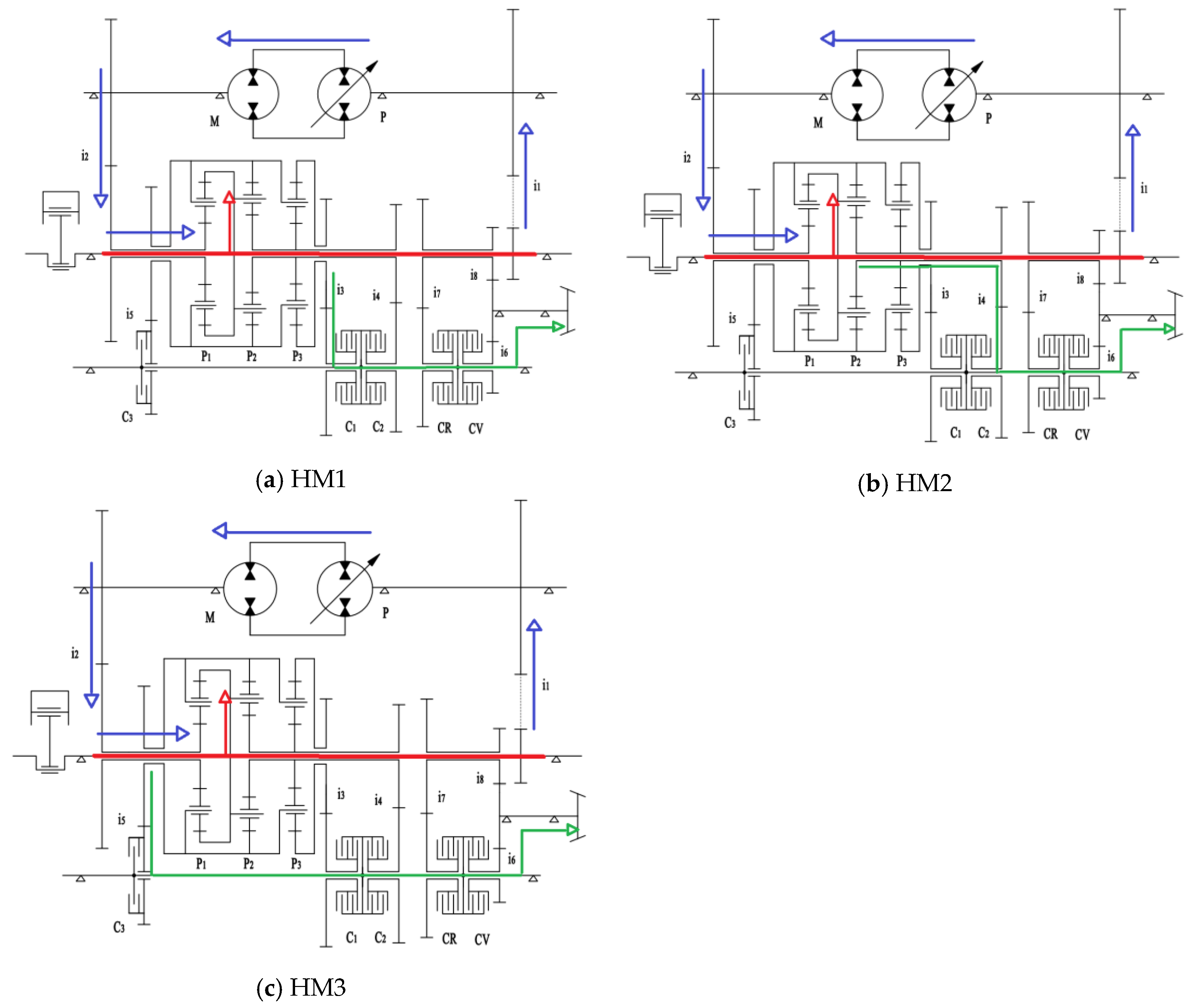
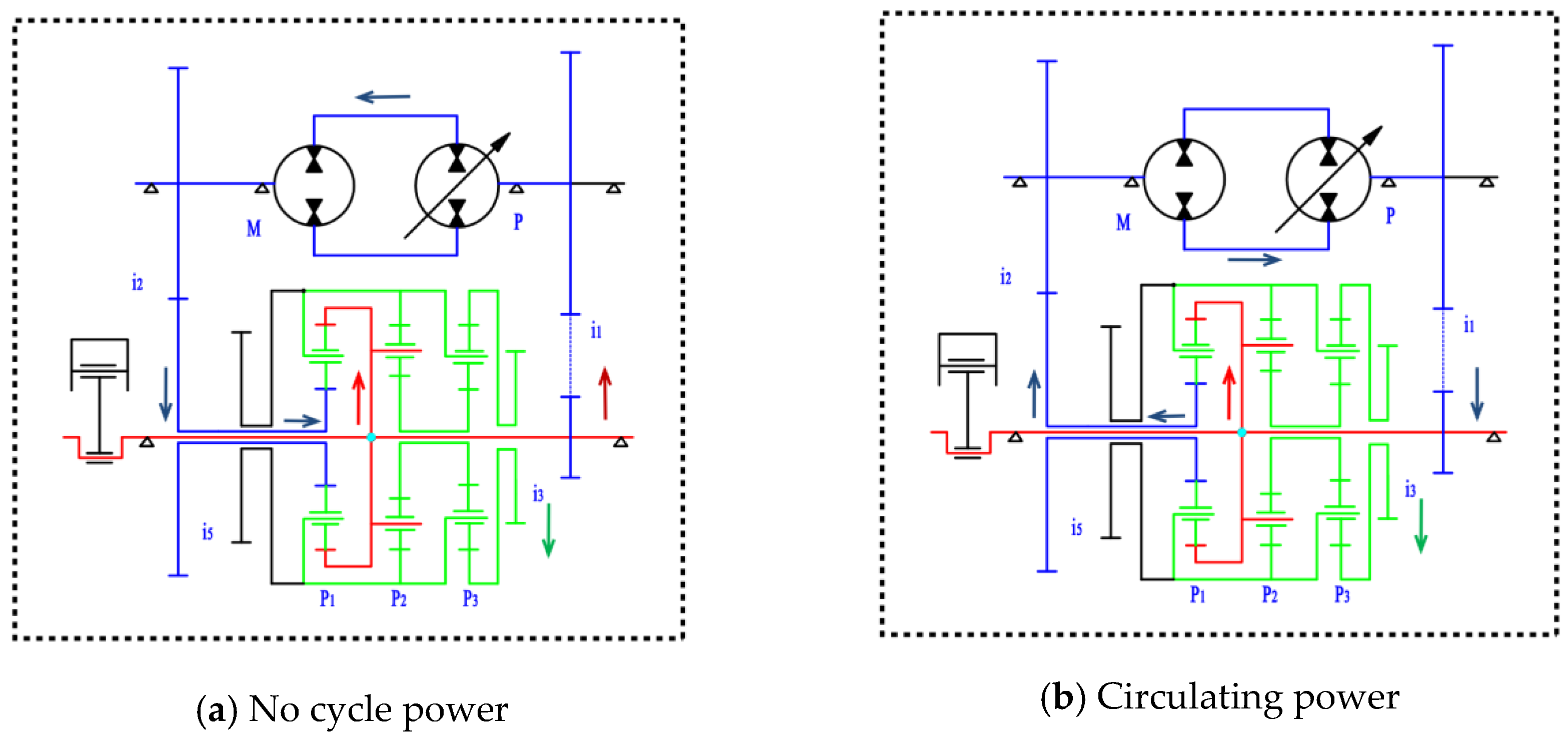
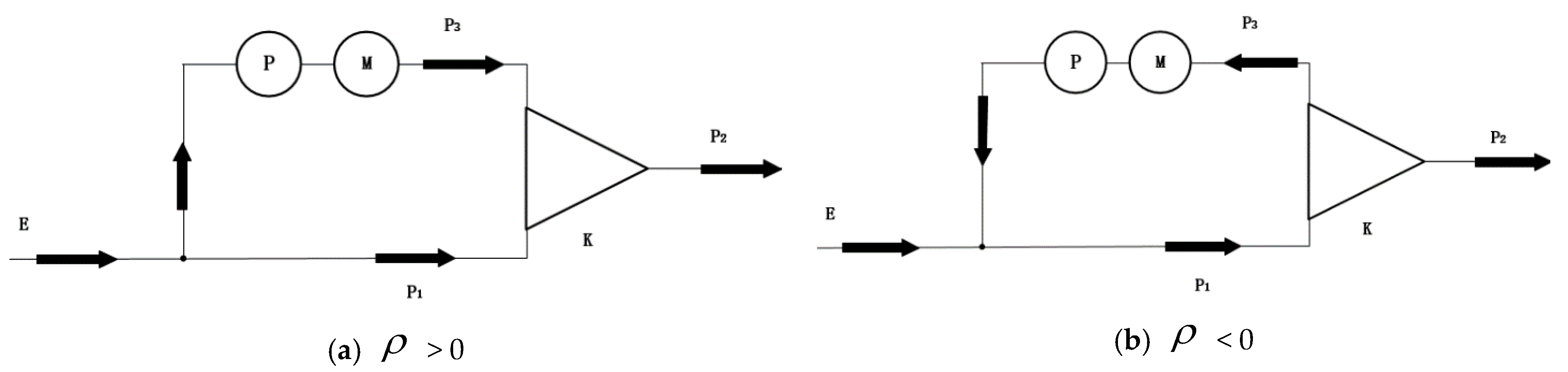
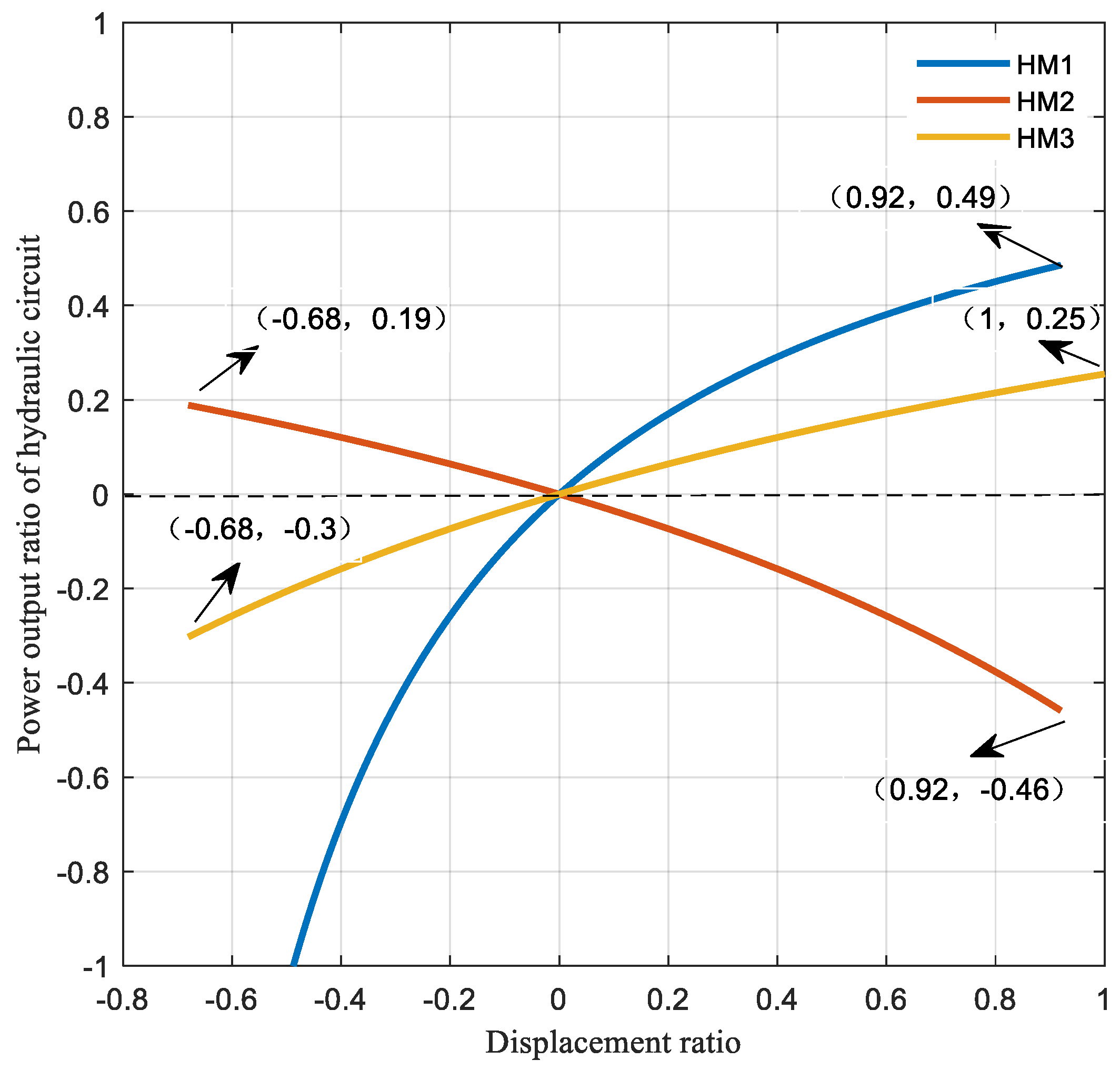
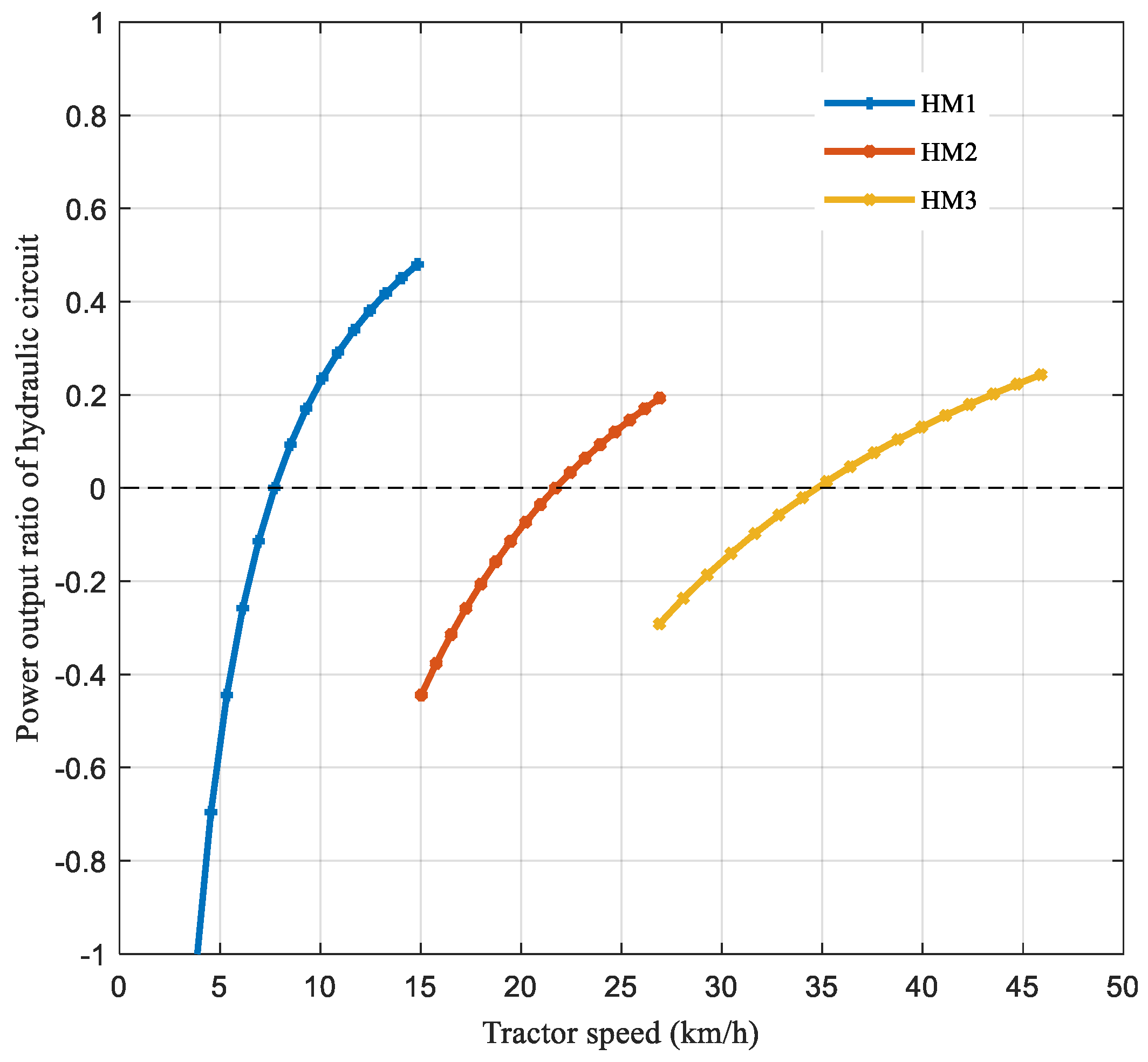
3.3. Results of Power Shunt Characteristics
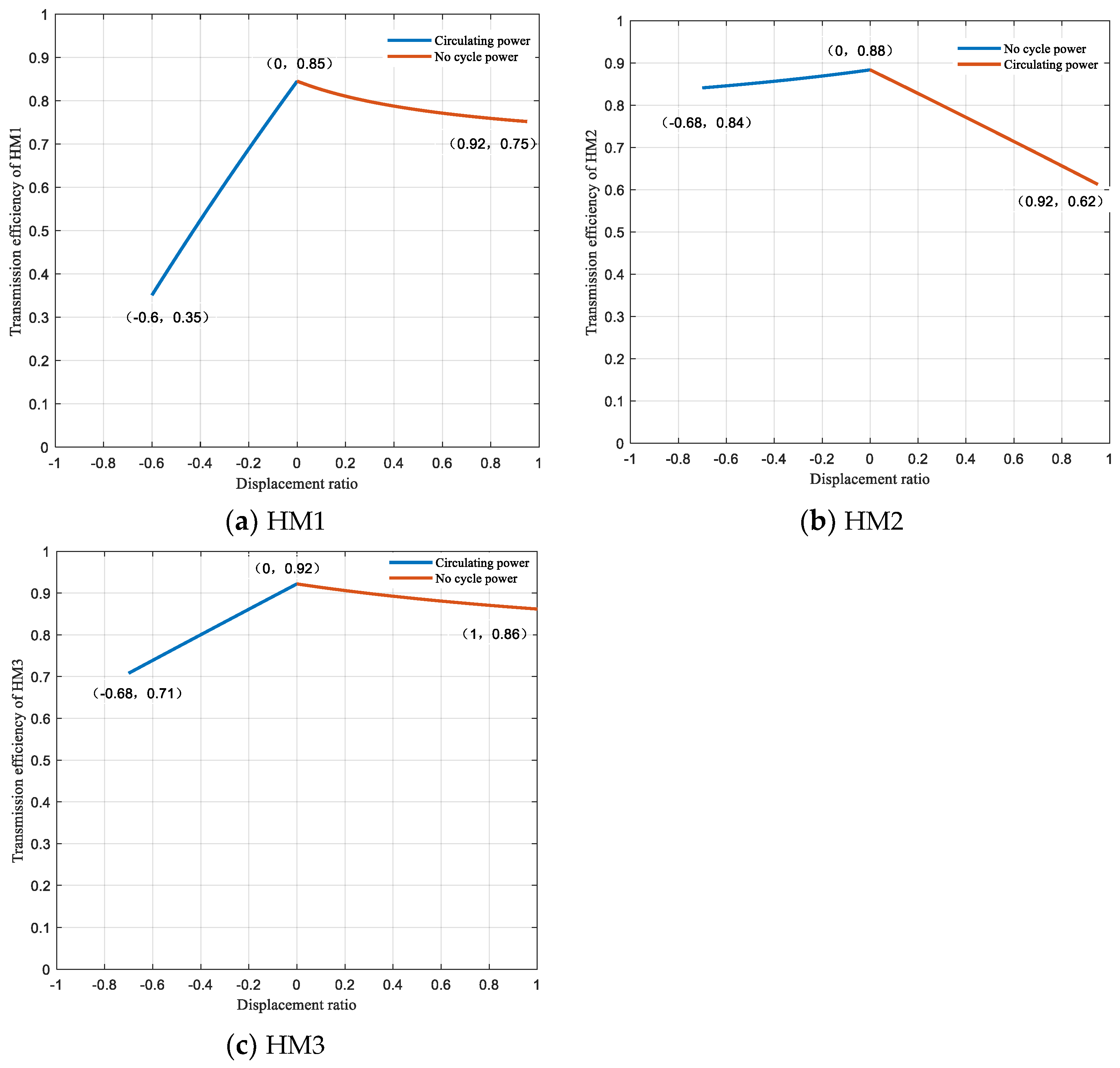
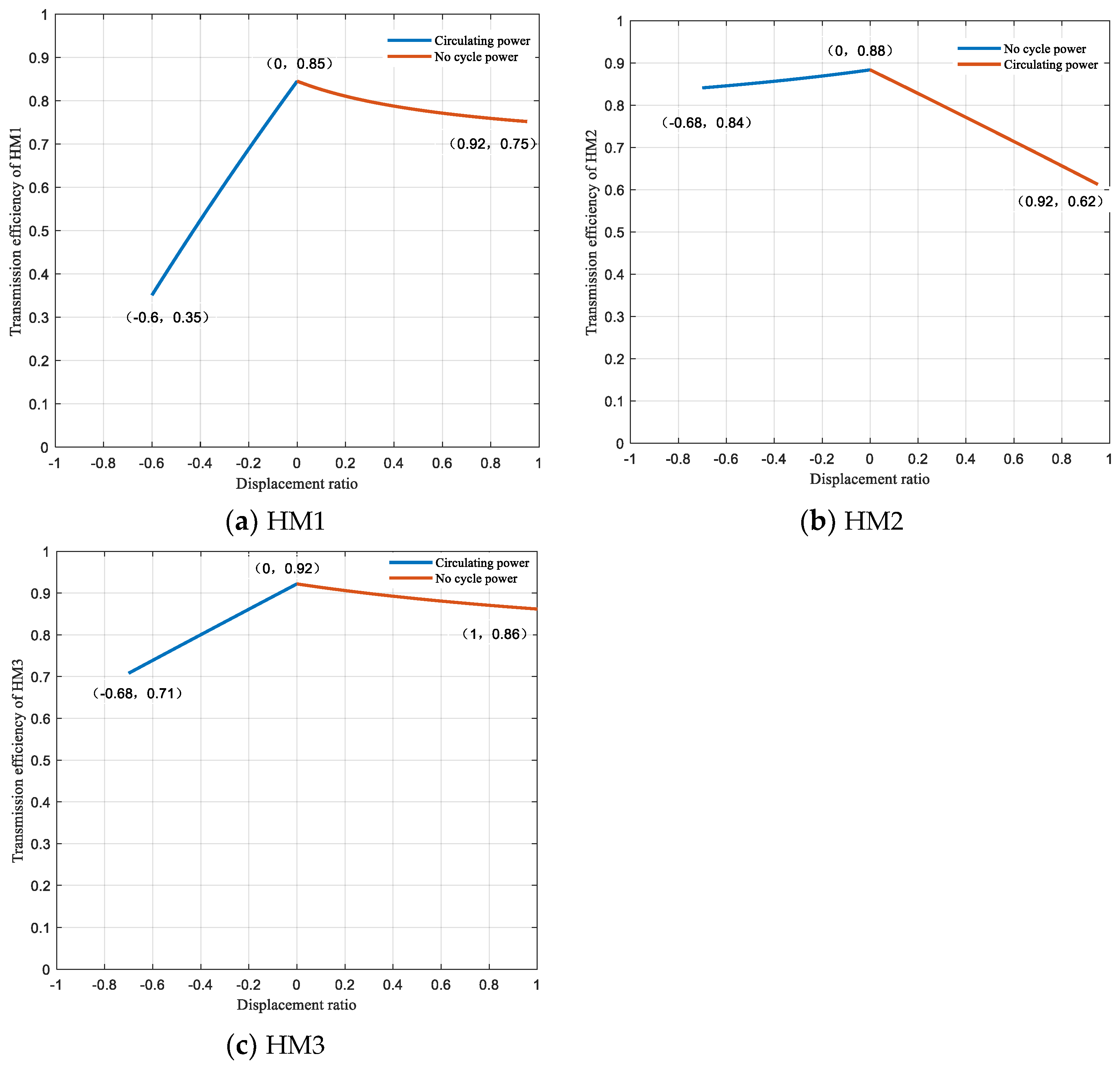
3.4. Results of Efficiency Characteristic
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| HMCVT | Hydro-mechanical continuously variable transmission |
| CV, CR, C1~C4 | Clutch in HMCVT system |
| i1~i8 | Gear ratio in HMCVT system |
| P1~P3 | Planetary gears in HMCVT system |
| k1~k3 | Characteristic parameters of planetary gear mechanism |
| HM1~HM3 | Forward power coupled working stages |
| RHM1~RHM3 | Backward power coupled working stages |
| e | Variable pump’s displacement ratio |
| rd | Power radius of the tractor drive wheel |
| iq | Rear axle transmission ratio |
| ib | Wheel drive ratio |
| s1~s3 | Sun wheel |
| r1~r3 | Gear ring |
| c1~c3 | Planet carrier |
| ne | Engine speed |
| ns | Sun wheel speed |
| nr | Gear ring speed |
| nc | Planet carrier speed |
| Ts | Sun wheel torque |
| Tr | Gear ring torque |
| Tc | Planet carrier torque |
| α | Engine throttle opening |
| ρ | Power output ratio of hydraulic circuit |
| P1 | Output power of engine |
| P2 | Output power of HMCVT system |
| P3 | Power transmitted through the hydraulic circuit |
| ΔPH | Power loss of pump–motor hydraulic circuit |
| ΔPJ | Power loss of planetary gear mechanism |
| ηHM | Transmission efficiency of HMCVT system |
| ηM | Pump–motor transmission efficiency |
| ηJ | Transmission efficiency of the confluence mechanism |
| ηi | Fixed-axis-gear transmission efficiency |
References
- Xie, B.; Wu, Z.B.; Mao, E.R. Development and prospect of key technologies on agricultural tractor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–17. [Google Scholar]
- Park, J.; Choi, S.; Oh, J.; Eo, J. Adaptive torque tracking control during slip engagement of a dry clutch in vehicle power train. Mech. Mach. Theory 2019, 134, 249–266. [Google Scholar] [CrossRef]
- Raikwar, S.; Tewari, V.K.; Mukhopadhyay, S.; Verma, C.R.B.; Rao, M.S. Simulation of components of a power shuttle transmission system for an agricultural tractor. Comput. Electron. Agric. 2015, 114, 114–124. [Google Scholar] [CrossRef]
- Ahn, S.; Choi, J.; Kim, S.; Lee, J.; Choi, C.; Kim, H. Development of an integrated engine-hydro-mechanical transmission control algorithm for a tractor. Adv. Mech. Eng. 2015, 7, 1687814015593870. [Google Scholar] [CrossRef]
- Ince, E.; Guler, M.A. On the advantages of the new power-split infinitely variable transmission over conventional mechanical transmissions based on fuel consumption analysis. J. Clean. Prod. 2020, 244, 118795. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, S.; Li, Y.; Wu, J.; Chu, J. Studies of several large-scale forestry operating vehicles at home and abroad and prospect of vehicle type design. J. Beijing For. Univ. 2019, 41, 154–166. [Google Scholar]
- Wang, J.Y.; Xia, C.G.; Fan, X.; Cai, J.Y. Research on transmission characteristics of hydro mechanical continuously variable transmission of tractor. Math. Probl. Eng. 2020, 2020, 6978329. [Google Scholar]
- Lu, L.; Zhou, Y.; Li, H.; Wang, Y.; Yin, Y.; Zhao, J. Electro-hydraulic shift quality of power shift transmission of heavy duty tractor. Trans. Chin. Soc. Agric. Mach. 2020, 51 (Suppl. S1), 550–556, 602. [Google Scholar]
- Wang, G. Study on Characteristics, Control and Fault Diagnosis of Tractor Hydro-Mechanical CVT; Nanjing Agricultural University: Nanjing, China, 2014. [Google Scholar]
- Xia, Y.; Sun, D.Y. Characteristic analysis on a new hydro-mechanical continuously variable transmission system. Mech. Mach. Theory 2018, 126, 457–467. [Google Scholar] [CrossRef]
- Zhang, Q.; Sun, D.Y.; Qin, D.T. Optimal parameters design method for power reflux hydro-mechanical transmission system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 585–594. [Google Scholar] [CrossRef]
- Wu, W.; Luo, J.L.; Wei, C.H.; Liu, H.; Yuan, S.H. Design and control of a hydro-mechanical transmission for all-terrain vehicle. Mech. Mach. Theory 2020, 153, 104052. [Google Scholar] [CrossRef]
- Volpe, S.S.; Carbone, G.; Napolitano, M.; Sedoni, E. Design optimization of input and output coupled power split infinitely variable transmissions. J. Mech. Des. 2009, 131, 111002. [Google Scholar] [CrossRef]
- Xu, L.L.; Zhou, Z.L.; Peng, Q.L. Drive scheme design and characteristic analysis of multi-range hydro-mechanical CVT. Chin. Mech. Eng. 2012, 23, 2641–2645. [Google Scholar]
- Zhu, Z.; Gao, X.; Cao, L.L.; Pan, D.Y.; Zhu, Y. Analysis of design schemes of HMCVT. J. Mech. Trans. 2015, 39, 165–169. [Google Scholar]
- Yu, J.; Wu, C.Y.; Hu, Y.H.; Mou, J. Characteristic analysis of a new compound HMCVT. J. Jiangsu Univ. Nat. Sci. Ed. 2016, 37, 507–511. [Google Scholar]
- Yu, J.; Bai, J.J.; Huang, G.Q. Characteristic study and transmission scheme design of compound coupled HMCVT. J. Mech. Trans. 2017, 41, 58–63. [Google Scholar]
- Yu, J.; Chen, H.; Liu, J.H. Speed ratio follow-up control of HMCVT based on variable universe fuzzy PID. Chin. Mech. Eng. 2019, 30, 1226–1232. [Google Scholar]
- Xi, Z.Q.; Zhou, Z.L.; Zhang, M.Z.; Cao, Q. Shift characteristics and control strategy of power shift transmission on tractor. Trans. Chin. Soc. Agric. Mach. 2016, 47, 350–357. [Google Scholar]
- Du, W.; Zhao, S.D.; Gao, J.Z. Research status and development trend of tractor power shift technology. Auto. App. Tech. 2020, 3, 216–219. [Google Scholar]
- Ni, X.D.; Zhu, S.H.; Zhang, H.J.; Chang, Y.L.; Ouyang, D.Y.; Wang, G.M. Experiment of shift quality factors for hydro-mechanical CVT. Trans. Chin. Soc. Agric. Mach. 2013, 44, 15–20. [Google Scholar]
- Liu, F.X.; Wu, W.; Hu, J.B.; Yuan, S. Design of multi-range hydro-mechanical transmission using modular method. Mech. Syst. Signal Process. 2019, 126, 1–20. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, Z.; Qian, J. A new non-geometric transmission parameter optimization design method for HMCVT based on improved GA and maximum transmission efficiency. Comput. Electron. Agric. 2019, 167, 105034. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, G.; Chu, G.; Niu, H.; Zhang, Y.; Yang, F. Design matching and dynamic performance test for an HST-based drive system of a hillside crawler tractor. Agriculture 2021, 11, 466. [Google Scholar] [CrossRef]
- Cheng, Z.; Zheng, S.; Qian, Y.; Lu, Z.; Zhang, H. Based on improved SA and GA a new method for optimizing transmission parameters of automotive HMCVT. J. Mech. Strength 2020, 42, 61–66. [Google Scholar]
- Zhang, P.; Ni, X.; Mei, W.; Peng, X. Design and characteristic analysis of hydro-mechanical continuous variable transmission of cotton picker. Mach. Des. Manuf. 2017, 10, 64–66, 70. [Google Scholar]
- Han, L.; Liu, H.X.; Cao, Y.; Ren, L.L. Model predictive control-based starting control optimization strategy for CVT. Chin. Mech. Eng. 2020, 31, 1765–1771. [Google Scholar]
- Qian, Y.; Cheng, Z.; Lu, Z.X. Bench testing and modeling analysis of optimum shifting point of HMCVT. Complexity 2021, 2021, 6629561. [Google Scholar] [CrossRef]
- Zhang, M. Control Strategy Development for Multi-Range Hydro-Mechanical Continuously Variable Transmission in Tractors; Xi’an University of Technology: Xi’an, China, 2007. [Google Scholar]
- Zhang, G.Q.; Wang, K.X.; Xiao, M.H.; Zhou, M.H. HMCVT steady state transmission efficiency based on HST EGT torque ratio. Trans. Chin. Soc. Agric. Mach. 2021, 52, 533–541. [Google Scholar]
- Wang, G.M.; Zhao, Y.H.; Xu, X.T.; Wu, Y.Q.; Nguyen, V.; Zhang, H.J. Analysis of traction characteristics of tractor equipped with metal belt power split CVT. J. Agric. Mech. Res. 2022, 44, 245–252. [Google Scholar]
- Hu, Y. Power Flow Analysis of Hydro-Mechanical Continuously Variable Transmission; Chongqing University: Chongqing, China, 2017. [Google Scholar]
- Wang, X. Study on Power Re-Circulation in Hydro-Mechanical Composite Transmission; Chongqing University: Chongqing, China, 2015. [Google Scholar]
- Zhu, Z.; Gao, X.; Cao, L.L.; Cai, Y.M.; Pan, D.Y. Research on the shift strategy of HMCVT based on the physical parameters and shift time. App. Math. Model. 2016, 40, 6889–6907. [Google Scholar] [CrossRef]
- Zhang, M.Z.; Wang, Q.S.; Bai, D.Y. Speed changing law of hydro-mechanical CVT based on maximum efficiency of tractors. Trans. Chin. Soc. Agric. Eng. 2016, 32, 74–78. [Google Scholar]
- Zhu, Z.; Gao, X.; Pan, D.Y.; Zhu, Y. Efficiency analysis on hydro-mechanical transmission. Adv. Mat. Res. 2014, 1037, 216–220. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, Z.; Dai, F. Research on HMCVT efficiency model based on the improved SA algorithm. Math. Probl. Eng. 2019, 2019, 2856908. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zhang, H.T.; Ge, Y.Y.; Qiu, W.; Xiao, M.H.; Xu, X.M.; Zhou, M.H. Mechanical efficiency of HMCVT under steady-state conditions. Shock Vib. 2021, 2021, 4275922. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Section | C1 | C2 | C3 | CV | CR |
|---|---|---|---|---|---|
| HM1 | ● | ○ | ○ | ● | ○ |
| HM2 | ○ | ● | ○ | ● | ○ |
| HM3 | ○ | ○ | ● | ● | ○ |
| RHM1 | ● | ○ | ○ | ○ | ● |
| RHM2 | ○ | ● | ○ | ○ | ● |
| RHM3 | ○ | ○ | ● | ○ | ● |
| k1 | k2 | k3 | i1 | i2 | i3 | i4 | i5 | i6 | i7 | i8 |
| 3 | 2 | 3 | 0.78 | 1.25 | 1.5 | 1.6 | 0.5 | 1.2 | 1 | 1.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Wang, L.; Lu, Z.; Qian, J.; Zhang, H.; Zhao, Y.; Cheng, Z.; Wang, X. Transmission Parameter Design and Characteristic Analysis of Three-Row Parallel Planetary Gear HMCVT. Machines 2022, 10, 740. https://doi.org/10.3390/machines10090740
Zhou H, Wang L, Lu Z, Qian J, Zhang H, Zhao Y, Cheng Z, Wang X. Transmission Parameter Design and Characteristic Analysis of Three-Row Parallel Planetary Gear HMCVT. Machines. 2022; 10(9):740. https://doi.org/10.3390/machines10090740
Chicago/Turabian StyleZhou, Huadong, Lin Wang, Zhixiong Lu, Jin Qian, Haijun Zhang, Yirong Zhao, Zhun Cheng, and Xingwei Wang. 2022. "Transmission Parameter Design and Characteristic Analysis of Three-Row Parallel Planetary Gear HMCVT" Machines 10, no. 9: 740. https://doi.org/10.3390/machines10090740
APA StyleZhou, H., Wang, L., Lu, Z., Qian, J., Zhang, H., Zhao, Y., Cheng, Z., & Wang, X. (2022). Transmission Parameter Design and Characteristic Analysis of Three-Row Parallel Planetary Gear HMCVT. Machines, 10(9), 740. https://doi.org/10.3390/machines10090740