
Kinematic Calibration of Parallel Robots Based on L-Infinity Parameter Estimation


Abstract
:1. Introduction
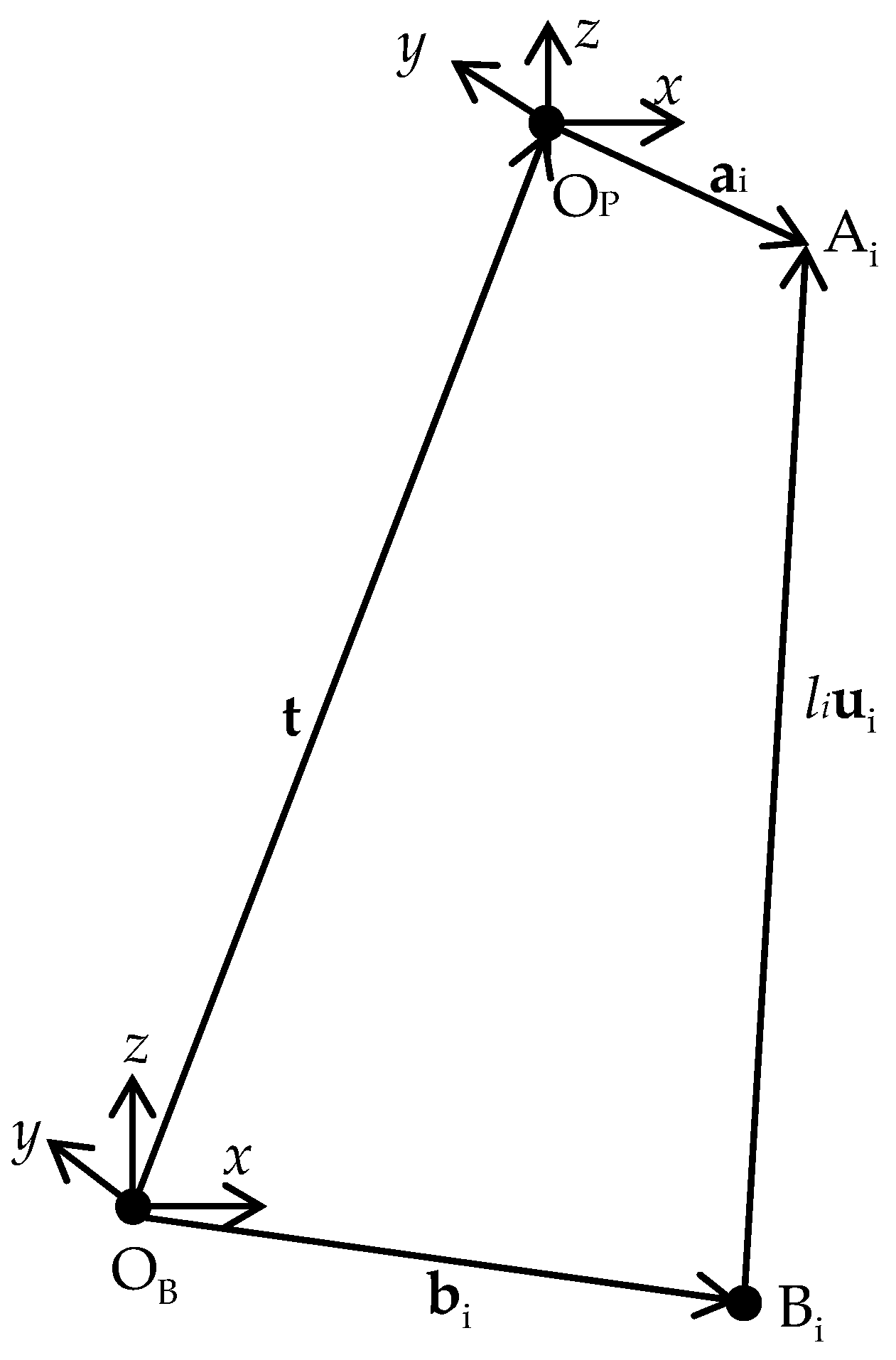
2. Kinematic Model
2.1. Inverse Kinematics
2.2. Forward Kinematics
- (1)
- Measure , and select an initial guess for the pose, .
- (2)
- Compute based on .
- (3)
- Form .
- (4)
- If < tolerance1, exit with as the solution.
- (5)
- Compute the partial derivative matrix such that .
- (6)
- Obtain update by solving .
- (7)
- If < tolerance2, exit with as the solution.
- (8)
- Update by and go to step (2).
3. Error Model
4. Calibration Method
5. Simulations and Experiments
5.1. Model Verification
- Select a set of desired poses evenly distributed in the workspace.
- Compute the measured lengths of the six hydraulic cylinders by using inverse kinematics with the nominal kinematic parameters in Table 1.
- Actuate the parallel robot to the selected poses in sequence with the measured lengths of the hydraulic cylinders, and compute the actual poses by using forward kinematics with the actual kinematic parameters (the nominal kinematic parameters plus the assumed kinematic parameter errors in Table 2).
- Compute the actual pose errors, namely, subtract the selected poses from the actual poses.
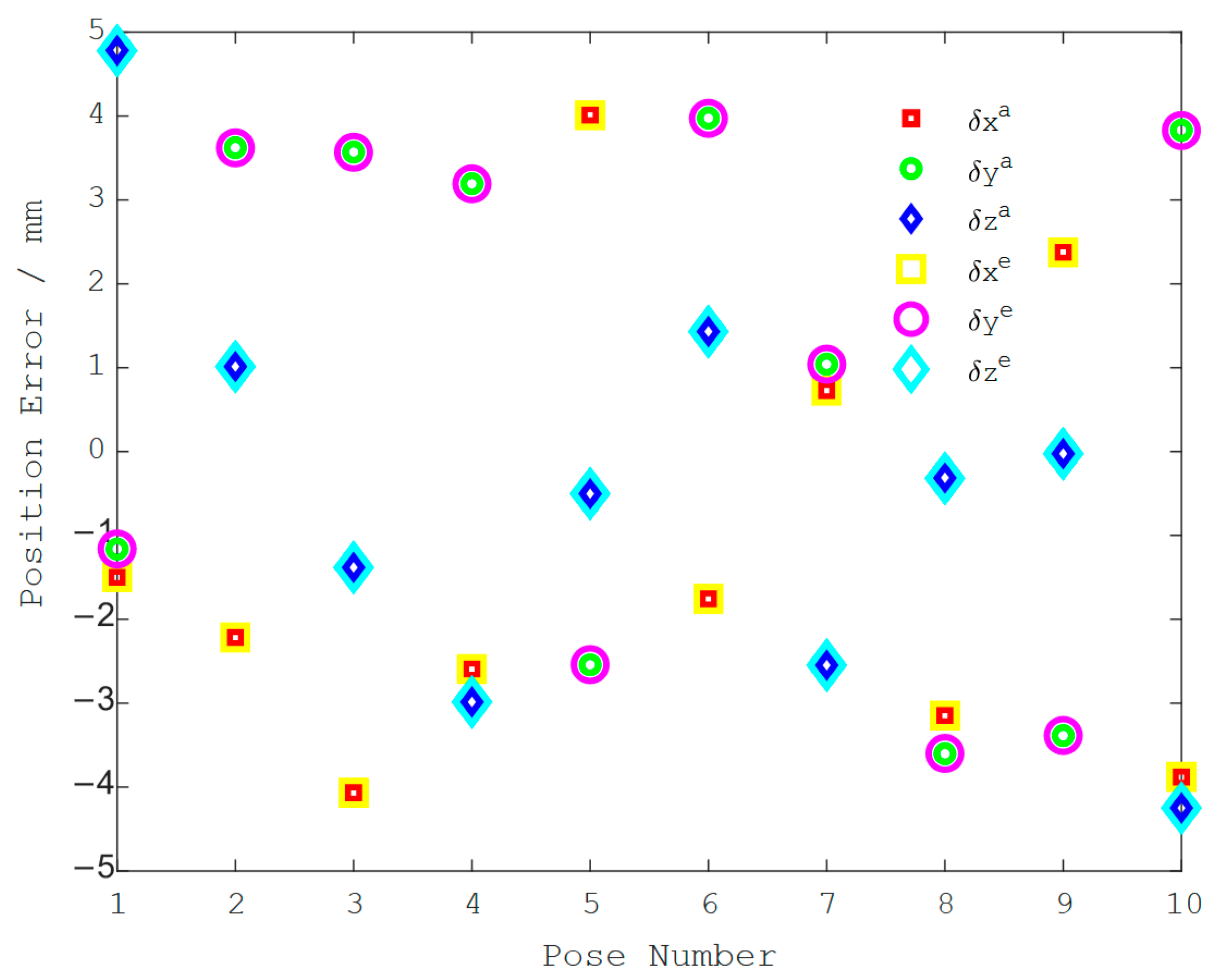
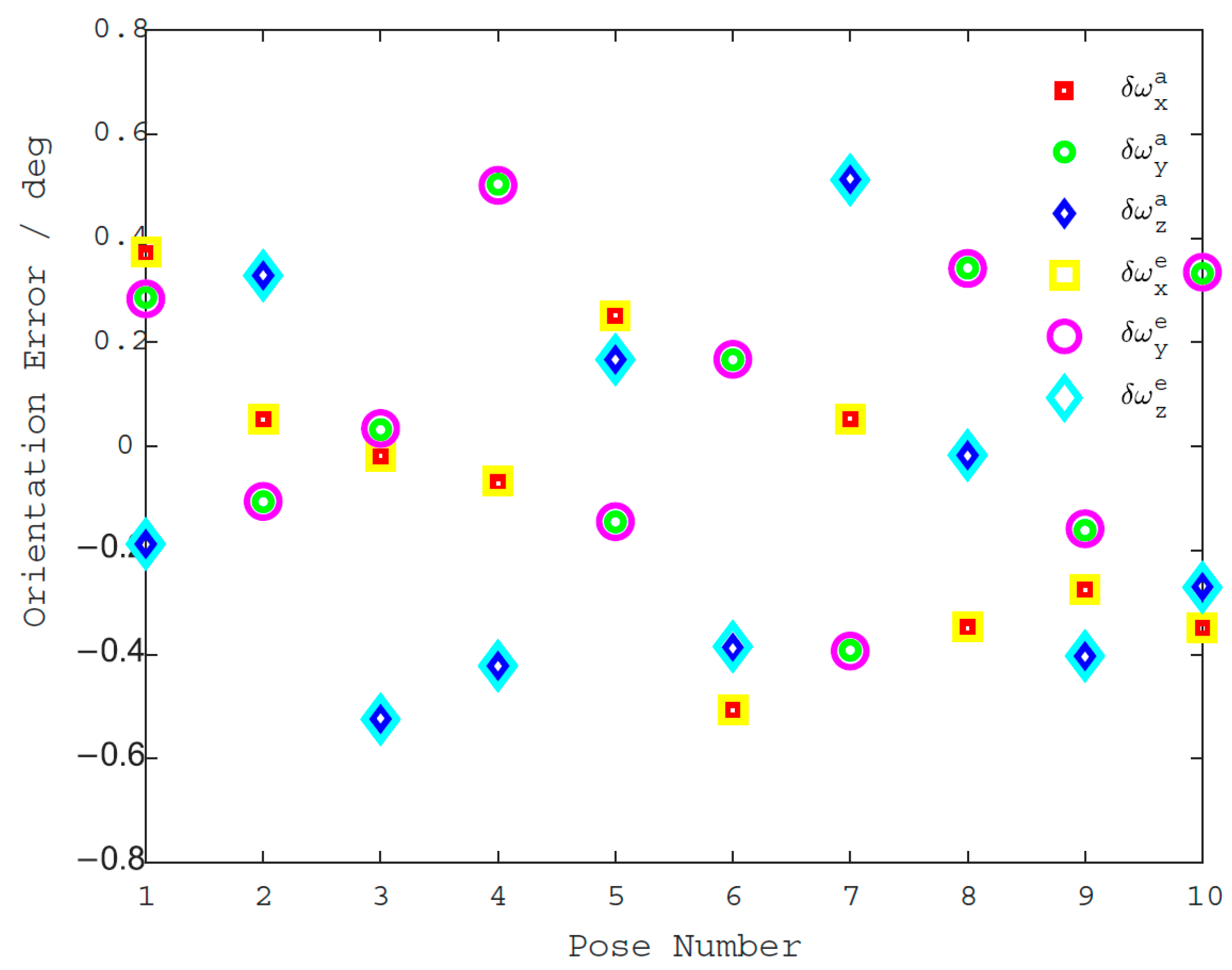
- Compute the pose errors by using the pose error model with the nominal kinematic parameters, the lengths and the unit vectors of the hydraulic cylinders, and the kinematic parameter errors.
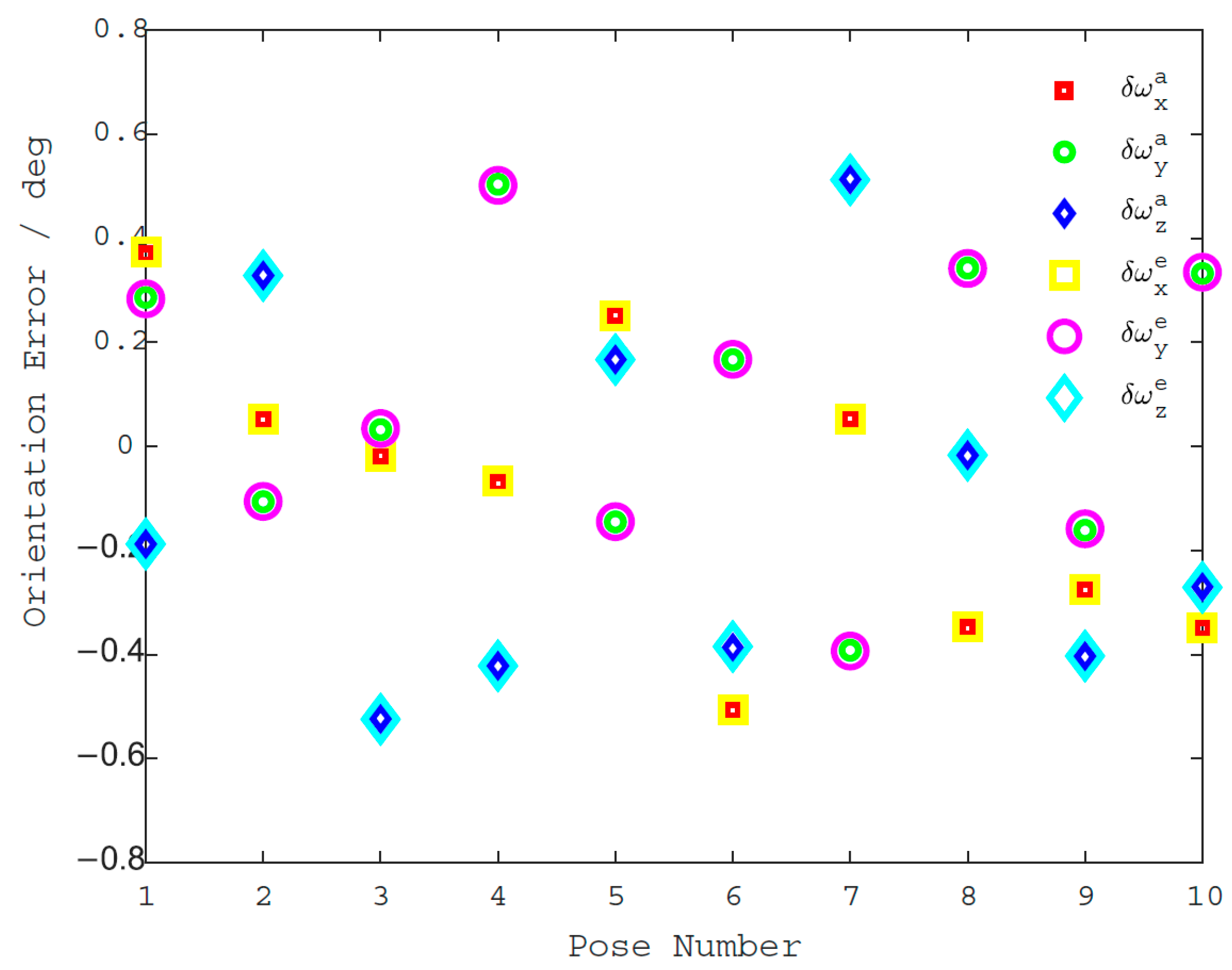
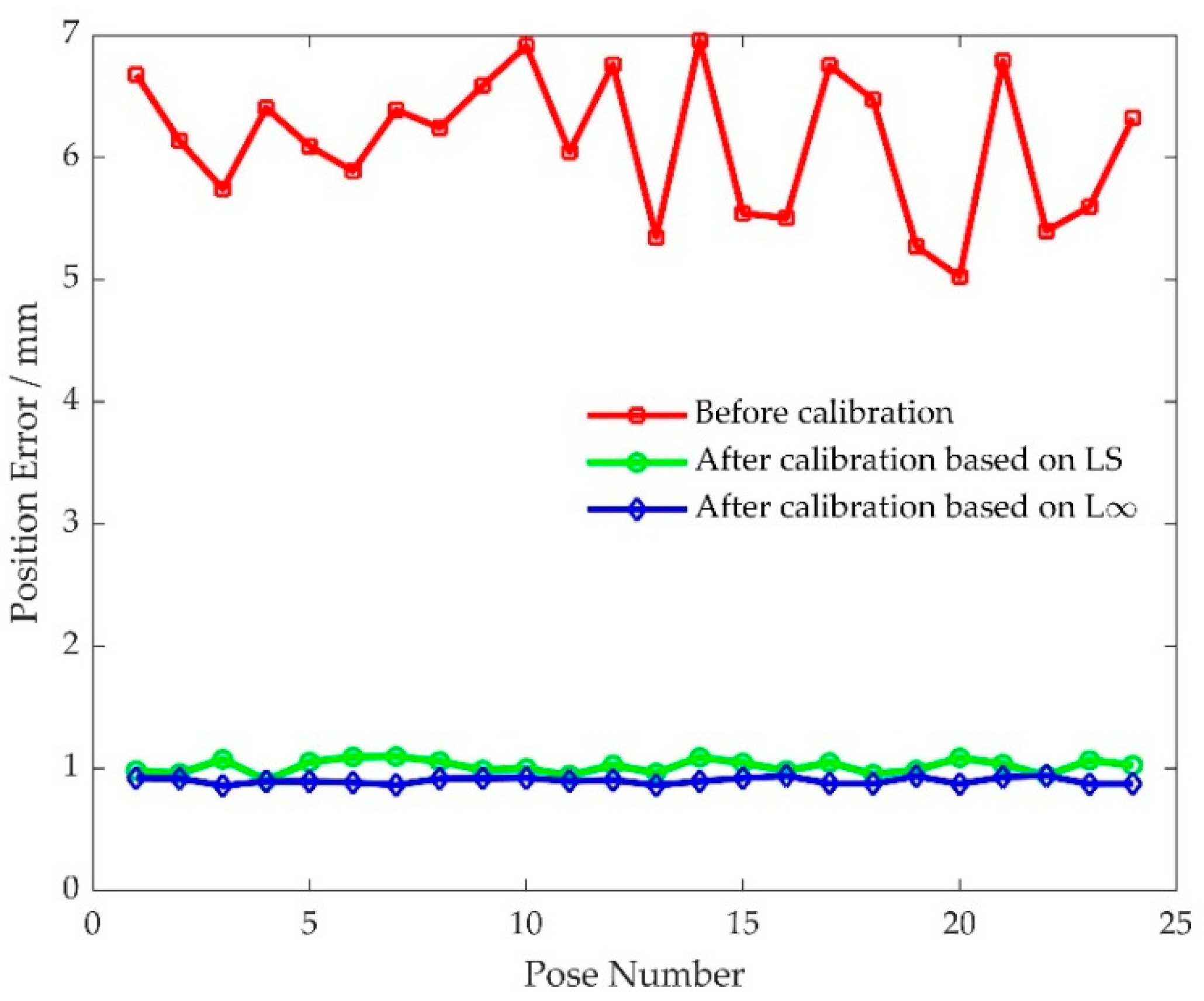
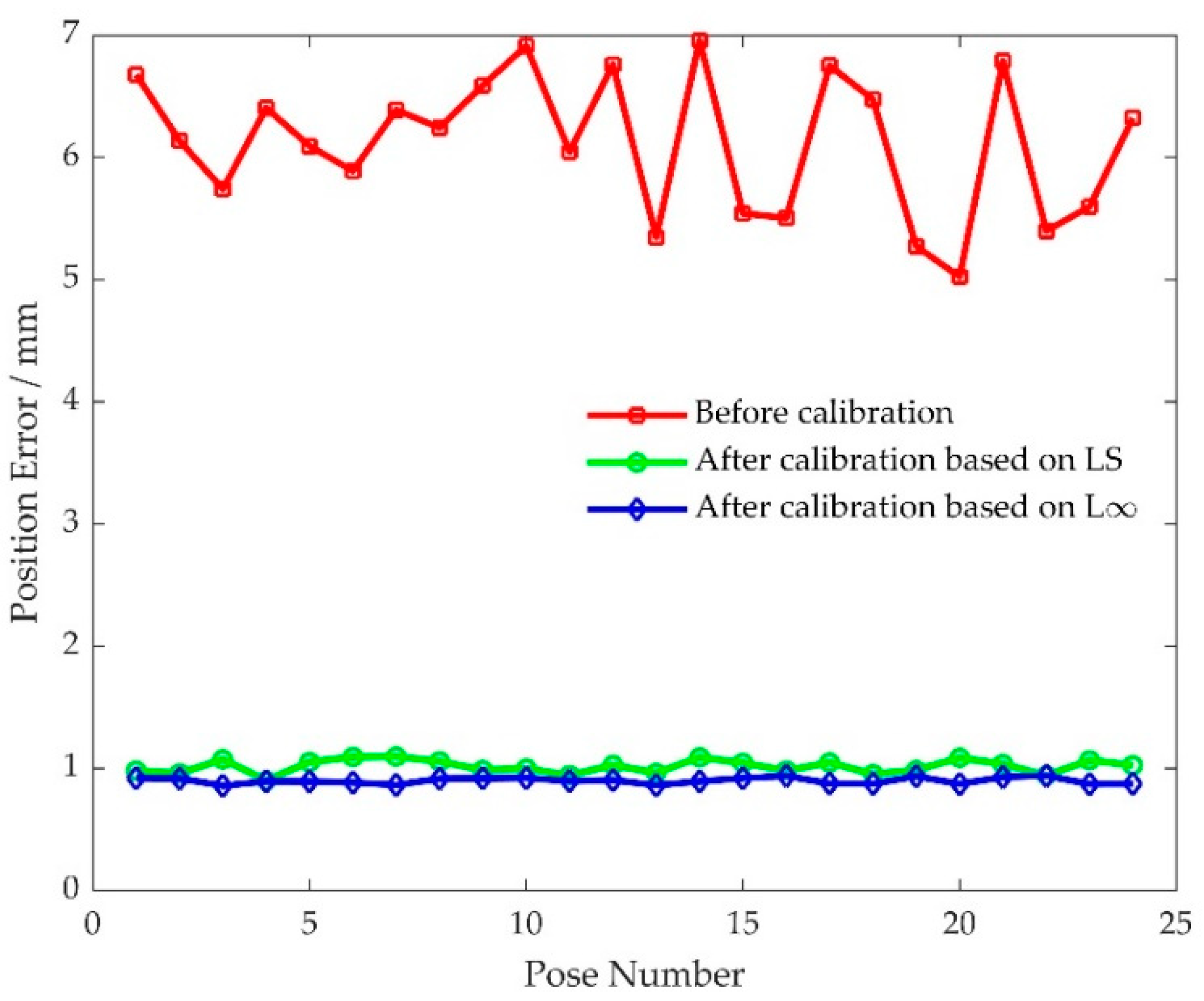
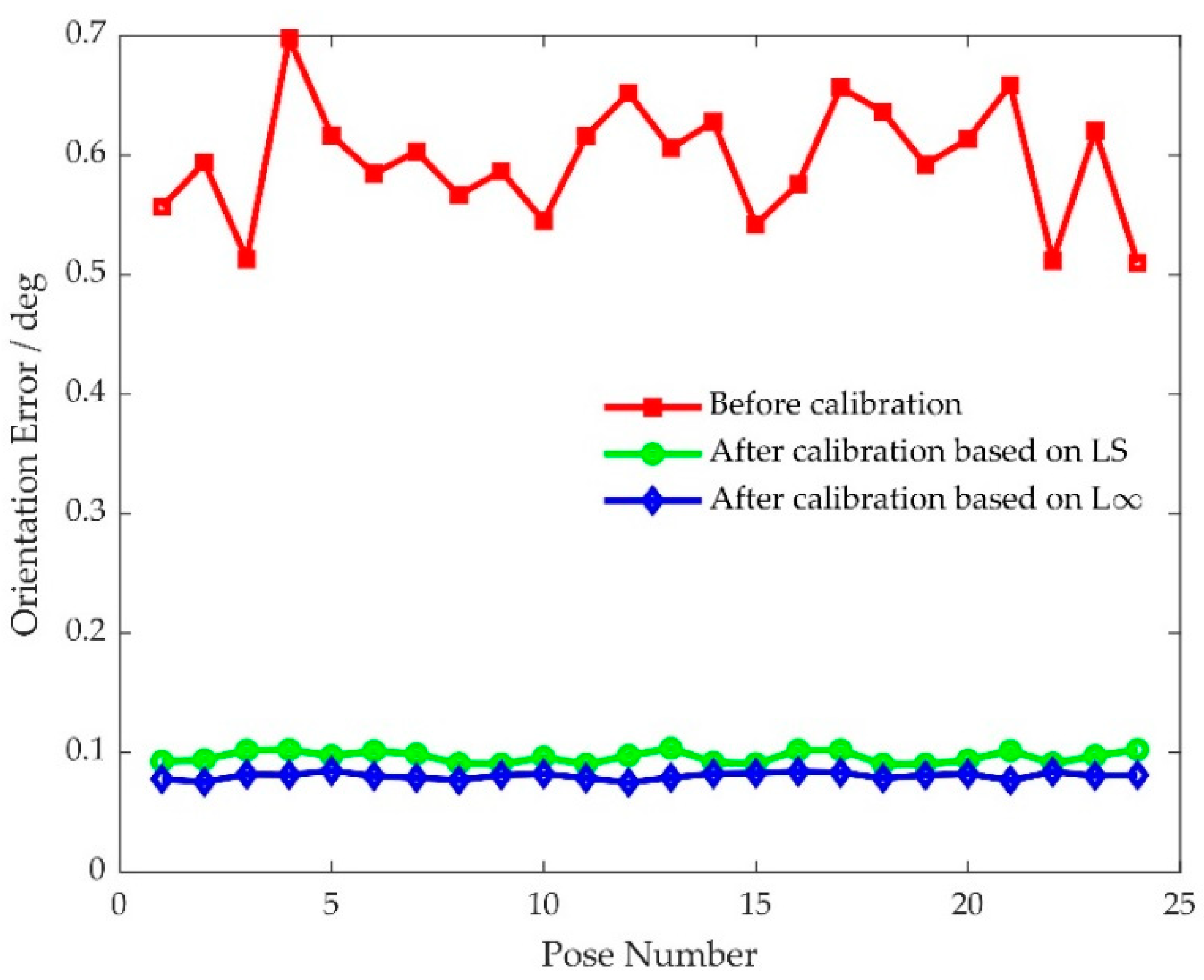
- Pose errors vary at different locations in the workspace. The pose errors are affected not only by kinematic parameter errors, but also by the pose of the parallel robot.
- Pose errors computed by using the pose error model are basically consistent with the actual pose errors.
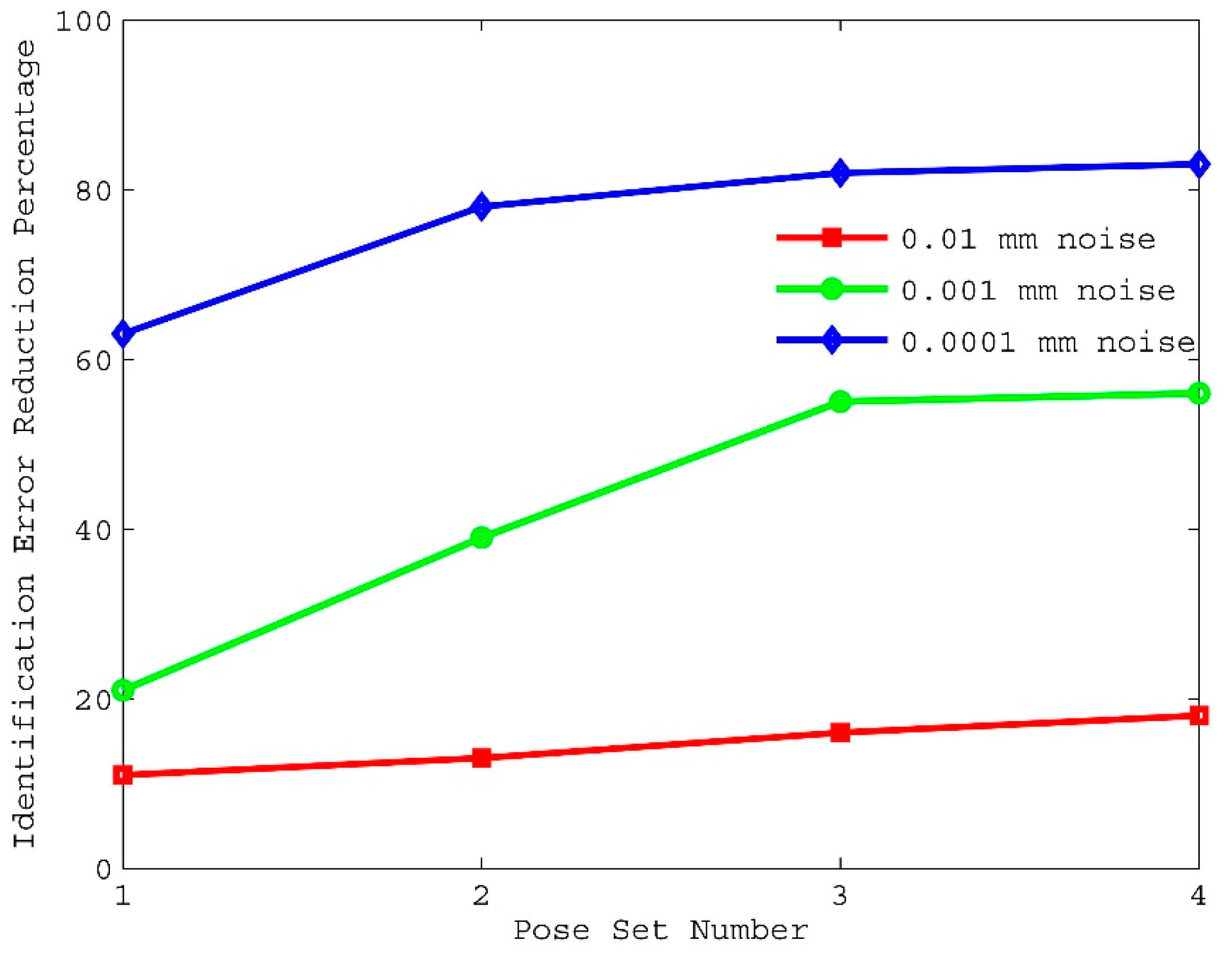
5.2. Identification Simulations
5.3. Comparison Experiments
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, S.M.; Han, J.W.; Yang, Y.; Xu, D.M.; Qu, Z.Y. Force and Moment Compensation Method Based on Three Degree-of-Freedom Stiffness-Damping Identification for Manipulator Docking Hardware-In-The-Loop Simulation System. IEEE Access 2018, 6, 63452–63467. [Google Scholar] [CrossRef]
- Hu, Y.; Gao, F.; Zhao, X.C.; Yang, T.H.; Shen, H.R.; Qi, C.K.; Cao, R. A parameter dimension reduction-based estimation approach to enhance the kinematic accuracy of a parallel hardware-in-the-loop docking simulator. Robotica 2021, 39, 959–974. [Google Scholar] [CrossRef]
- Wang, L.P.; Zhang, Z.K.; Shao, Z.F.; Tang, X.Q. Analysis and optimization of a novel planar 5R parallel mechanism with variable actuation modes. Robot. Comput. Integr. 2019, 56, 178–190. [Google Scholar] [CrossRef]
- Song, Y.M.; Zhang, J.T.; Lian, B.B.; Sun, T. Kinematic calibration of a 5-DoF parallel kinematic machine. Precis. Eng. J. Int. Soc. Precis. Eng. Nanotechnol. 2016, 45, 242–261. [Google Scholar] [CrossRef]
- Bai, S.P.; Teo, M.Y. Kinematic calibration and pose measurement of a medical parallel manipulator by optical position sensors. J. Robot. Syst. 2003, 20, 201–209. [Google Scholar] [CrossRef]
- Saafi, H.; Laribi, M.A.; Zeghloul, S. Optimal torque distribution for a redundant 3-RRR spherical parallel manipulator used as a haptic medical device. Robot. Auton. Syst. 2017, 89, 40–50. [Google Scholar] [CrossRef]
- Lian, B. Geometric error modeling of parallel manipulators based on conformal geometric algebra. Adv. Appl. Clifford Algebras 2018, 28, 1–24. [Google Scholar] [CrossRef]
- Simas, H.; Di Gregorio, R. Geometric error effects on manipulators’ positioning precision: A general analysis and evaluation method. J. Mech. Robot. 2016, 8, 061016. [Google Scholar] [CrossRef]
- Sun, T.; Wang, P.F.; Lian, B.B.; Liu, S.D.; Zhai, Y.P. Geometric accuracy design and error compensation of a one-translational and three-rotational parallel mechanism with articulated traveling plate. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2018, 232, 2083–2097. [Google Scholar] [CrossRef]
- Zhang, Z.K.; Xie, G.Q.; Shao, Z.F.; Gosselin, C. Kinematic calibration of cable-driven parallel robots considering the pulley kinematics. Mech. Mach. Theory 2022, 169, 104648. [Google Scholar] [CrossRef]
- Yang, S.H.; Lee, D.M.; Lee, H.H.; Lee, K.I. Sequential measurement of position-independent geometric errors in the rotary and spindle axes of a hybrid parallel kinematic machine. Int. J. Precis. Eng. Manuf. 2020, 21, 2391–2398. [Google Scholar] [CrossRef]
- Shao, Z.F.; Tang, X.Q.; Chen, X.; Wang, L.P. Research on the inertia matching of the Stewart parallel manipulator. Robot. Comput. Integr. 2012, 28, 649–659. [Google Scholar] [CrossRef]
- Chebbi, A.H.; Affi, Z.; Romdhane, L. Prediction of the pose errors produced by joints clearance for a 3-UPU parallel robot. Mech. Mach. Theory 2009, 44, 1768–1783. [Google Scholar] [CrossRef]
- Cammarata, A. A novel method to determine position and orientation errors in clearance-affected over constrained mechanisms. Mech. Mach. Theory 2017, 118, 247–264. [Google Scholar] [CrossRef]
- Yu, D.Y. A new pose accuracy compensation method for parallel manipulators based on hybrid artificial neural network. Neural Comput. Appl. 2021, 33, 909–923. [Google Scholar] [CrossRef]
- Zhang, F.; Shang, W.W.; Li, G.J.; Cong, S. Calibration of geometric parameters and error compensation of non-geometric parameters for cable-driven parallel robots. Mechatronics 2021, 77, 102595. [Google Scholar] [CrossRef]
- Kim, H.S.; Choi, Y.J. The kinematic error bound analysis of the Stewart platform. J. Robot. Syst. 2000, 17, 63–73. [Google Scholar] [CrossRef]
- Ding, J.; Liu, J.G.; Zhang, R.P.; Zhang, L.; Hao, G.B. Accuracy modeling and analysis for a lock-or-release mechanism of the Chinese Space Station Microgravity Platform. Mech. Mach. Theory 2018, 130, 552–566. [Google Scholar] [CrossRef]
- Ding, J.Z.; Wang, C.J.; Wu, H.Y. Accuracy analysis of a parallel positioning mechanism with actuation redundancy. J. Mech. Sci. Technol. 2019, 33, 403–412. [Google Scholar] [CrossRef]
- Tang, X.Q.; Chai, X.M.; Tang, L.W.; Shao, Z.F. Accuracy synthesis of a multi-level hybrid positioning mechanism for the feed support system in FAST. Robot. Comput. Integr. Manuf. 2014, 30, 565–575. [Google Scholar] [CrossRef]
- Huang, T.; Bai, P.J.; Mei, J.P.; Chetwynd, D.G. Tolerance design and kinematic calibration of a four-degrees-of-freedom pic-and-Place parallel robot. J. Mech. Robot. 2016, 8, 061018. [Google Scholar] [CrossRef] [Green Version]
- Takematsu, R.; Satonaka, N.; Thasana, W.; Iwamura, K.; Sugimura, N. A study on tolerances design of parallel link robots based on mathematical models. J. Adv. Mech. Des. Syst. Manuf. 2018, 12, JAMDSM0015. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, H.Q.; Yan, J.H.; Masory, O. Calibration of Stewart platforms and other parallel manipulators by minimizing inverse kinematic residuals. J. Robot. Syst. 1998, 15, 395–405. [Google Scholar] [CrossRef]
- Daney, D. Kinematic calibration of the Gough platform. Robotica 2003, 21, 677–690. [Google Scholar] [CrossRef]
- Hu, Y.; Gao, F.; Zhao, X.C.; Wei, B.C.; Zhao, D.H.; Zhao, Y.N. Kinematic calibration of a 6-DOF parallel manipulator based on identifiable parameters separation (IPS). Mech. Mach. Theory 2018, 126, 61–78. [Google Scholar] [CrossRef]
- Huang, T.; Zhao, D.; Yin, F.W.; Tian, W.J.; Chetwynd, D.G. Kinematic calibration of a 6-DOF hybrid robot by considering multicollinearity in the identification Jacobian. Mech. Mach. Theory 2019, 131, 371–384. [Google Scholar] [CrossRef]
- Luo, X.; Xie, F.G.; Liu, X.J.; Xie, Z.H. Kinematic calibration of a 5-axis parallel machining robot based on dimensionless error mapping matrix. Robot. Comput. Integr. Manuf. 2021, 70, 102115. [Google Scholar] [CrossRef]
- Shen, H.P.; Meng, Q.M.; Li, J.; Deng, J.M.; Wu, G.L. Kinematic sensitivity, parameter identification and calibration of a non-fully symmetric parallel Delta robot. Mech. Mach. Theory 2021, 161, 104311. [Google Scholar] [CrossRef]
- Jiang, Z.X.; Huang, M.; Tang, X.Q.; Guo, Y.X. A new calibration method for joint-dependent geometric errors of industrial robot based on multiple identification spaces. Robot. Comput. Integr. Manuf. 2021, 71, 102175. [Google Scholar] [CrossRef]
- Sun, T.; Liu, C.Y.; Lian, B.B.; Wang, P.F.; Song, Y.M. Calibration for precision kinematic control of an articulated serial robot. IEEE Trans. Ind. Electron. 2021, 68, 6000–6009. [Google Scholar] [CrossRef]
- Zhang, D.; Gao, Z. Optimal kinematic calibration of parallel manipulators with pseudoerror theory and cooperative coevolutionary network. IEEE Trans. Ind. Electron. 2012, 59, 3221–3231. [Google Scholar] [CrossRef]
- Klimchik, A.; Wu, Y.; Caro, S.; Furet, B.; Pashkevich, A. Geometric and elastostatic calibration of robotic manipulator using partial pose measurements. Adv. Robot. 2014, 28, 1419–1429. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Klimchik, A.; Caro, S.; Furet, B.; Pashkevich, A. Geometric calibration of industrial robots using enhanced partial pose measurements and design of experiments. Robot. Comput. Integr. Manuf. 2015, 35, 151–168. [Google Scholar] [CrossRef] [Green Version]
- Mao, C.T.; Chen, Z.W.; Li, S.; Zhang, X. Separable nonlinear least squares algorithm for robust kinematic calibration of serial robots. J. Intell. Robot. Syst. 2021, 101, 2. [Google Scholar] [CrossRef]
- Gao, G.B.; Li, Y.; Liu, F.; Han, S.C. Kinematic calibration of industrial robots based on distance information using a hybrid identification method. Complexity 2021, 2021, 8874226. [Google Scholar] [CrossRef]
- Borm, J.H.; Meng, C.H. Determination of optimal measurement configurations for robot calibration based on observability measure. J. Robot. Syst. 1991, 10, 51–63. [Google Scholar] [CrossRef]
- Khalil, W.; Gautier, C.D.; Enguehard, C. Identifiable parameters and optimum configurations for robot calibration. Robotica 1991, 9, 63–70. [Google Scholar] [CrossRef]
- Zhuang, H.Q.; Wang, K.; Roth, Z.S. Optimal selection of measurement configurations for robot calibration using simulated annealing. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; 1994; pp. 393–398. [Google Scholar] [CrossRef]
- Zhuang, H.Q.; Wu, J.; Huang, W. Optimal planning of robot calibration experiments by genetic algorithms. J. Robot. Syst. 1997, 14, 741–752. [Google Scholar] [CrossRef]
- Daney, D.; Papegay, Y.; Madeline, B. Choosing measurement poses for robot calibration with the local convergence method and tabu search. Int. J. Robot. Res. 2005, 24, 501–518. [Google Scholar] [CrossRef]
- Dasgupta, B.; Mruthyunjaya, T.S. A canonical formulation of the direct position kinematics for a general 6-6 Stewart platform. Mech. Mach. Theory 1994, 29, 819–827. [Google Scholar] [CrossRef]
- Dasgupta, B.; Mruthyunjaya, T.S. A constructive predictor-corrector algorithm for the direct position kinematics for a general 6-6 Stewart platform. Mech. Mach. Theory 1996, 31, 799–811. [Google Scholar] [CrossRef]
- Husty, M.L. An algorithm for solving the direct kinematics of general Stewart-Gough Platform. Mech. Mach. Theory 1996, 31, 365–380. [Google Scholar] [CrossRef]
- Pratik, P.; Sarah, L. A hybrid strategy to solve the forward kinematics problem in parallel manipulators. IEEE Trans. Robot. 2005, 21, 18–25. [Google Scholar]
- Chvatal, V. Linear Programming; W. H. Freeman: New York, NY, USA, 1983. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| aix (mm) | aiy (mm) | aiz (mm) | bix (mm) | biy (mm) | biz (mm) | lix (mm) | liy (mm) | liz (mm) | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1394.7 | 122.0 | 0 | 2049.3 | 3038.5 | 0 | −654.6 | −2916.5 | 3091.2 |
| 2 | −591.7 | 1268.8 | 0 | 1606.8 | 3294.0 | 0 | −2198.5 | −2025.2 | 3091.2 |
| 3 | −803.0 | 1146.8 | 0 | −3656.1 | 255.5 | 0 | 2853.1 | 891.3 | 3091.2 |
| 4 | −803.0 | −1146.8 | 0 | −3656.1 | −255.5 | 0 | 2853.1 | −891.3 | 3091.2 |
| 5 | −591.7 | −1268.8 | 0 | 1606.8 | −3294.0 | 0 | −2198.5 | 2025.2 | 3091.2 |
| 6 | 1394.7 | −122.0 | 0 | 2049.3 | −3038.5 | 0 | −654.6 | 2916.5 | 3091.2 |
| δaix (mm) | δaiy (mm) | δaiz (mm) | δbix (mm) | δbiy (mm) | δbiz (mm) | δlix (mm) | δliy (mm) | δliz (mm) | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.90 | −0.09 | 0.84 | −0.18 | −0.72 | −0.97 | 0.69 | 0.36 | −0.39 |
| 2 | −0.54 | −0.96 | 0.48 | 0.79 | −0.59 | 0.49 | 0.05 | −0.24 | −0.62 |
| 3 | 0.21 | 0.64 | −0.65 | −0.88 | −0.60 | −0.11 | −0.59 | 0.66 | −0.61 |
| 4 | −0.03 | −0.11 | −0.19 | −0.29 | 0.21 | 0.86 | 0.34 | 0.05 | 0.36 |
| 5 | 0.78 | 0.23 | 0.87 | 0.63 | −0.46 | −0.07 | 0.68 | 0.42 | −0.39 |
| 6 | 0.52 | 0.58 | 0.83 | −0.98 | −0.61 | −0.16 | −0.96 | −0.14 | 0.08 |
| δaix (mm) | δaiy (mm) | δaiz (mm) | δbix (mm) | δbiy (mm) | δbiz (mm) | δlix (mm) | δliy (mm) | δliz (mm) | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.0538 | 0.1834 | −0.2259 | 0.0862 | 0.0319 | −0.1308 | −0.0434 | 0.0343 | 0.3578 |
| 2 | 0.2769 | −0.1350 | 0.3035 | 0.0725 | −0.0063 | 0.0715 | −0.0205 | −0.0124 | 0.1490 |
| 3 | 0.1409 | 0.1417 | 0.0671 | −0.1207 | 0.0717 | 0.1630 | 0.0489 | 0.1035 | 0.0727 |
| 4 | −0.0303 | 0.0294 | −0.0787 | 0.0888 | −0.1147 | −0.1069 | −0.0809 | −0.2944 | 0.1438 |
| 5 | 0.0325 | −0.0755 | 0.1370 | −0.1712 | −0.0102 | −0.0241 | 0.0319 | 0.0313 | −0.0865 |
| 6 | −0.0030 | −0.0165 | 0.0628 | 0.1093 | 0.1109 | −0.0864 | 0.0077 | −0.1214 | −0.1114 |
| δaix (mm) | δaiy (mm) | δaiz (mm) | δbix (mm) | δbiy (mm) | δbiz (mm) | δlix (mm) | δliy (mm) | δliz (mm) | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | −0.0022 | 0.4847 | −0.2434 | 0.1174 | −0.0713 | 0.3533 | −0.3444 | 0.0103 | 0.1747 |
| 2 | 0.3480 | 0.4883 | 0.0272 | −0.4717 | −0.2347 | −0.3357 | 0.7433 | −0.1947 | 0.2366 |
| 3 | −0.0608 | 0.2810 | −0.2419 | −0.4434 | −0.4498 | 0.1544 | −0.0561 | −0.0620 | 0.4488 |
| 4 | 0.0922 | 0.0626 | 0.5021 | −0.2544 | 0.2203 | 0.2641 | −0.0771 | 0.0682 | −0.3687 |
| 5 | −0.3630 | 0.0332 | 0.2284 | 0.8176 | −0.2109 | 0.0592 | −0.0261 | −0.6113 | −0.1388 |
| 6 | −0.5675 | 0.2658 | −0.2808 | 0.0317 | −0.1722 | 0.0960 | −0.1898 | 0.1549 | 0.2338 |
| δaix (mm) | δaiy (mm) | δaiz (mm) | δbix (mm) | δbiy (mm) | δbiz (mm) | δlix (mm) | δliy (mm) | δliz (mm) | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.7119 | −0.1941 | −2.1384 | −0.8396 | 1.3546 | −1.0722 | 0.9610 | 0.1240 | 1.4367 |
| 2 | −1.9609 | −0.1977 | −1.2078 | 2.9080 | 0.8252 | 1.3790 | −1.0582 | −0.4686 | −0.2725 |
| 3 | 1.0984 | −0.2779 | 0.7015 | −2.0518 | −0.3538 | −0.8236 | −1.5771 | 0.5080 | 0.2820 |
| 4 | 0.0335 | −1.3337 | 1.1275 | 0.3502 | −0.2991 | 0.0229 | −0.2620 | −1.7502 | −0.2857 |
| 5 | −0.8314 | −0.9792 | −1.1564 | −0.5336 | −2.0026 | 0.9642 | 0.5201 | −0.0200 | −0.0348 |
| 6 | −0.7982 | 1.0187 | −0.1332 | −0.7145 | 1.3514 | −0.2248 | −0.5890 | −0.2938 | −0.8479 |
| δx (mm) | δy (mm) | δz (mm) | δωx (deg) | δωy (deg) | δωz (deg) | |
|---|---|---|---|---|---|---|
| 1 | 0.7286 | −6.3683 | 3.9254 | −0.6993 | 0.0787 | −0.5509 |
| 2 | 3.2461 | 3.7276 | −4.6233 | 0.5205 | 0.1881 | −0.4997 |
| 3 | 0.4247 | −3.5500 | 5.2487 | 0.1637 | −0.6549 | −0.4653 |
| 4 | 7.1205 | −0.7135 | 7.0661 | 0.6958 | 0.1667 | 0.1756 |
| 5 | −3.8926 | 2.7736 | 0.3100 | 0.0440 | −0.1890 | 0.1089 |
| 6 | −5.4966 | −1.8954 | 5.5656 | −0.0239 | −0.6302 | −0.6266 |
| 7 | 5.4412 | 3.4634 | 1.3559 | 0.4299 | −0.0097 | 0.6130 |
| 8 | −6.0964 | −1.3912 | −4.8010 | −0.3787 | −0.4286 | 0.3274 |
| 9 | −1.2509 | 2.7113 | −4.1599 | 0.0023 | 0.5265 | 0.3404 |
| 10 | −0.6286 | 3.0045 | −1.2172 | 0.5702 | −0.4103 | −0.6106 |
| 11 | −1.8018 | −0.7148 | 3.6391 | 0.1103 | −0.4934 | 0.5132 |
| 12 | 3.8494 | −6.7218 | 4.7315 | 0.4917 | −0.4334 | 0.6175 |
| 13 | 1.9224 | −2.2985 | 4.2254 | 0.3415 | −0.6399 | 0.6880 |
| 14 | 3.9698 | −0.9706 | −2.4738 | 0.1262 | 0.1956 | 0.51111 |
| 15 | 6.2558 | −3.1595 | 0.5891 | −0.3521 | −0.3026 | 0.4076 |
| 16 | 6.8226 | −4.1999 | −5.7218 | 0.2396 | 0.0594 | 0.0239 |
| 17 | −4.2713 | 4.6767 | −5.4127 | −0.5823 | 0.2802 | −0.4496 |
| 18 | −5.0266 | −0.8908 | −5.0633 | 0.1826 | 0.0038 | −0.1380 |
| 19 | 2.8939 | 5.6152 | 2.6436 | 0.2319 | 0.0555 | −0.5112 |
| 20 | −5.6668 | −1.4413 | 0.0365 | 0.3290 | −0.0723 | −0.6564 |
| 21 | 0.4660 | 3.9291 | −4.3042 | 0.5560 | −0.5253 | 0.6242 |
| 22 | 0.5362 | −1.3616 | 0.0340 | 0.6850 | −0.0086 | −0.2752 |
| 23 | 5.2368 | 4.4890 | −4.9025 | 0.3843 | 0.5027 | −0.2833 |
| 24 | −0.1102 | 3.7296 | −6.2188 | 0.1198 | 0.5322 | −0.2306 |
| 25 | −1.4090 | −1.6372 | 5.0886 | 0.6089 | −0.3189 | −0.0414 |
| 26 | 2.5410 | −3.9304 | 0.9656 | 0.1179 | −0.4061 | 0.2140 |
| 27 | 3.5333 | 4.2317 | 6.2097 | −0.6761 | 0.0966 | −0.6644 |
| 28 | 0.3899 | 6.4896 | 2.8996 | −0.5296 | 0.2028 | 0.4875 |
| 29 | −2.0590 | −2.3453 | 1.2815 | 0.5164 | −0.1120 | 0.0882 |
| 30 | −4.8685 | 2.5387 | 4.5868 | −0.0171 | −0.4096 | 0.5043 |
| 31 | 1.3284 | −0.7669 | 5.4908 | 0.4912 | 0.6366 | −0.2095 |
| 32 | −3.2749 | 4.8440 | 7.0524 | −0.4047 | −0.5843 | −0.0711 |
| Before Kinematic Calibration | After Kinematic Calibration | |||||
|---|---|---|---|---|---|---|
| Position (mm) | Orientation (deg) | Based on L-Infinity | Based on Least Squares | |||
| Position (mm) | Orientation (deg) | Position (mm) | Orientation (deg) | |||
| Maximum error | 6.9595 | 0.6977 | 0.9408 | 0.0848 | 1.0980 | 0.1037 |
| Range of error | 14.2670 | 1.4721 | 1.8534 | 0.1620 | 2.0313 | 0.1815 |
| Average error | 6.1194 | 0.5952 | 0.9001 | 0.0805 | 1.0174 | 0.0964 |
| Root-mean-square error | 6.1455 | 0.5971 | 0.9005 | 0.0806 | 1.0189 | 0.0965 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D. Kinematic Calibration of Parallel Robots Based on L-Infinity Parameter Estimation. Machines 2022, 10, 436. https://doi.org/10.3390/machines10060436
Yu D. Kinematic Calibration of Parallel Robots Based on L-Infinity Parameter Estimation. Machines. 2022; 10(6):436. https://doi.org/10.3390/machines10060436
Chicago/Turabian StyleYu, Dayong. 2022. "Kinematic Calibration of Parallel Robots Based on L-Infinity Parameter Estimation" Machines 10, no. 6: 436. https://doi.org/10.3390/machines10060436
APA StyleYu, D. (2022). Kinematic Calibration of Parallel Robots Based on L-Infinity Parameter Estimation. Machines, 10(6), 436. https://doi.org/10.3390/machines10060436