
A Fast Globally Convergent Particle Swarm Optimization for Defect Profile Inversion Using MFL Detector


Abstract
1. Introduction
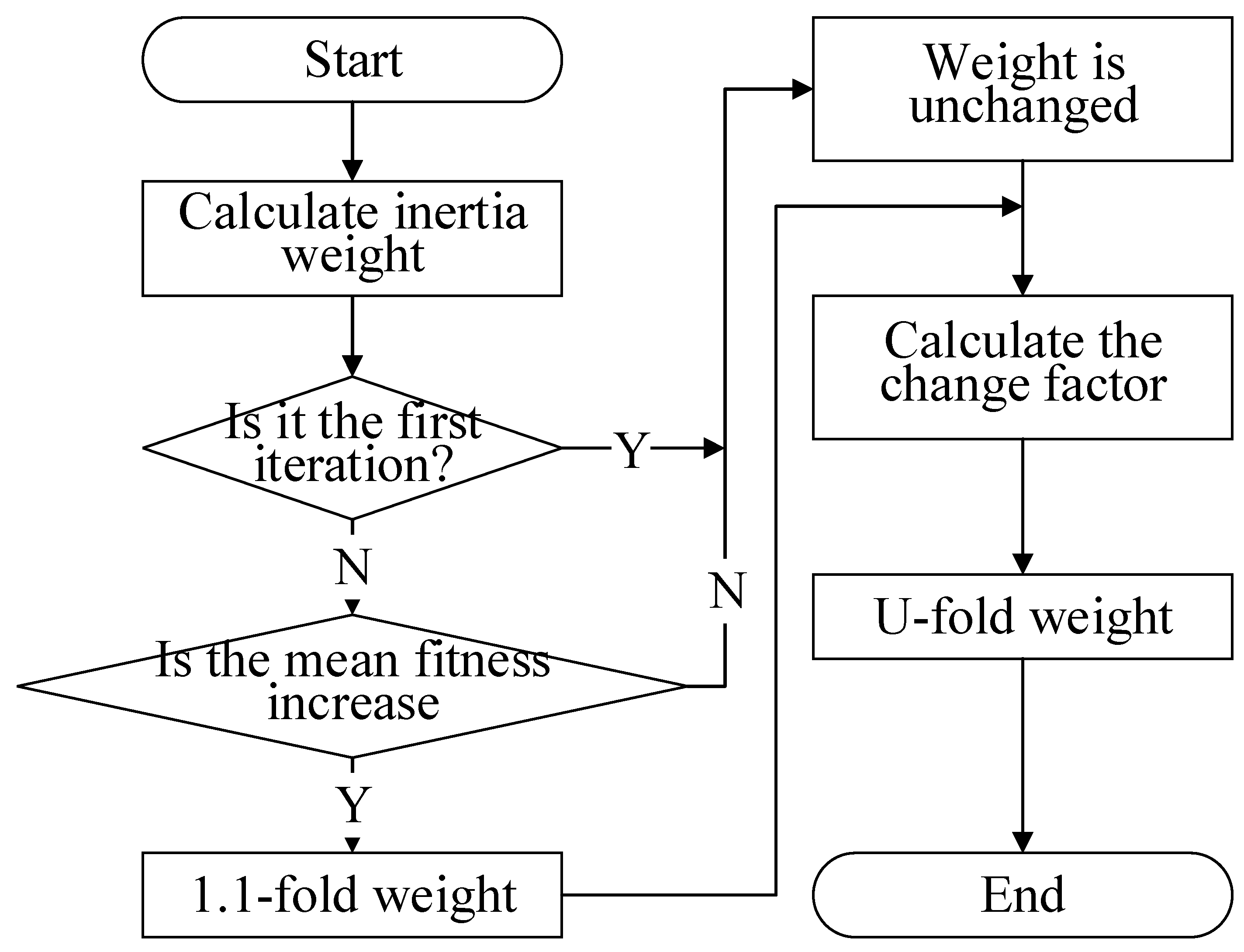
- A traditional particle swarm optimization algorithm cannot match the appropriate motion state for each particle. This paper introduces the concept of personalized inertia weight. This method judges the current position of each particle by comparing the fitness of each particle with the average fitness of the population. Based on the state, the inertia weight of particles with a better position is reduced, and the particles are focused on the development of the current region. For the particles in poor position, the inertia weight of the particle is increased, causing the particle to focus on potential area exploration. Compared with the BPSO algorithm, this method has been proven to have a faster convergence speed.
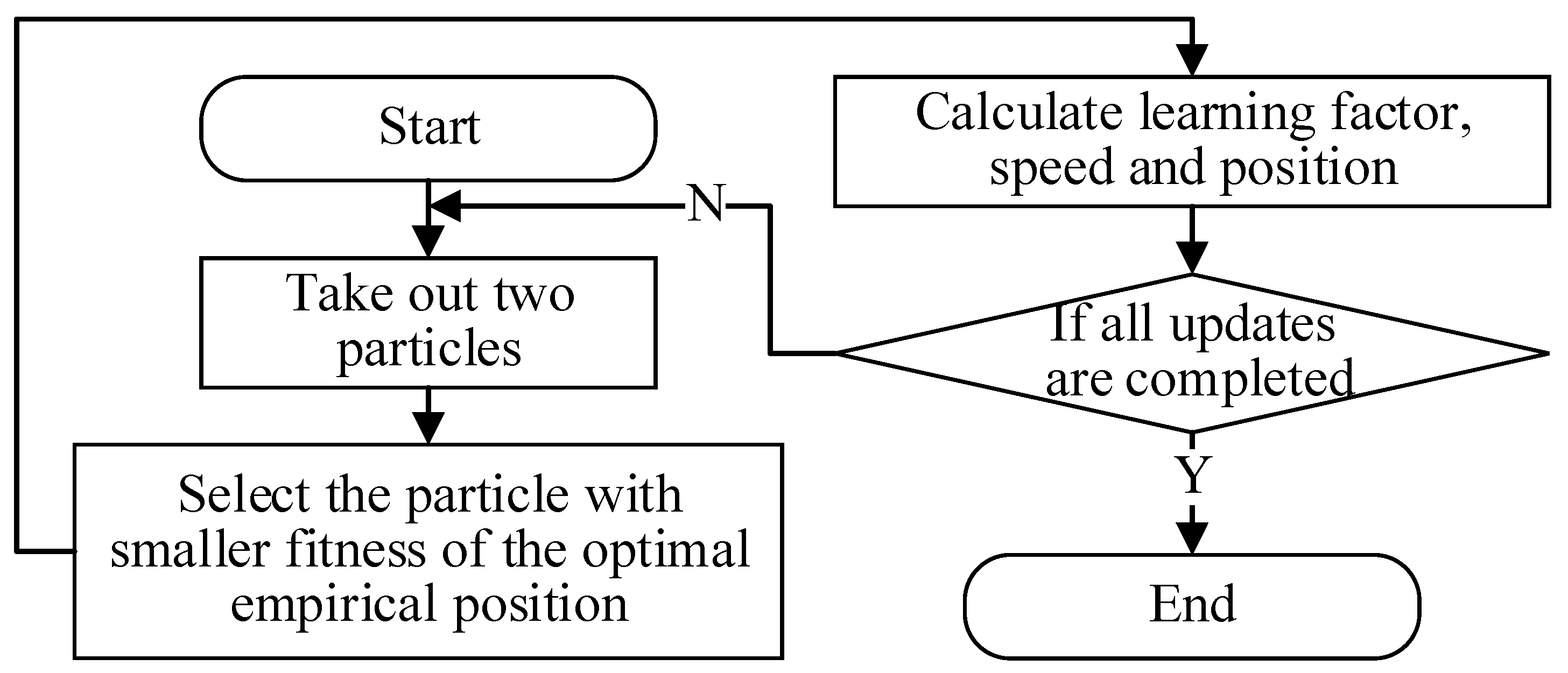
- The particle swarm optimization algorithm easily falls into a local minimum in the process of inversion iteration. This paper proposes a new speed update strategy. By introducing the optimal experiential positions of other random particles in the population to learn, this strategy causes the experiential learning object of the particle group to change from the original single object to multiple objects. This method has a learning factor that linearly decreases with the number of iteration steps, which makes the algorithm improve the population diversity in the early stage and avoids the algorithm instability caused b” ran’omness in the later stage.
- Experimental verification shows that the proposed algorithm achieves higher convergence accuracy and faster convergence speed compared with existing methods, such as particle swarm optimization and gradient descent.
2. Inversion Process of Irregular Defects
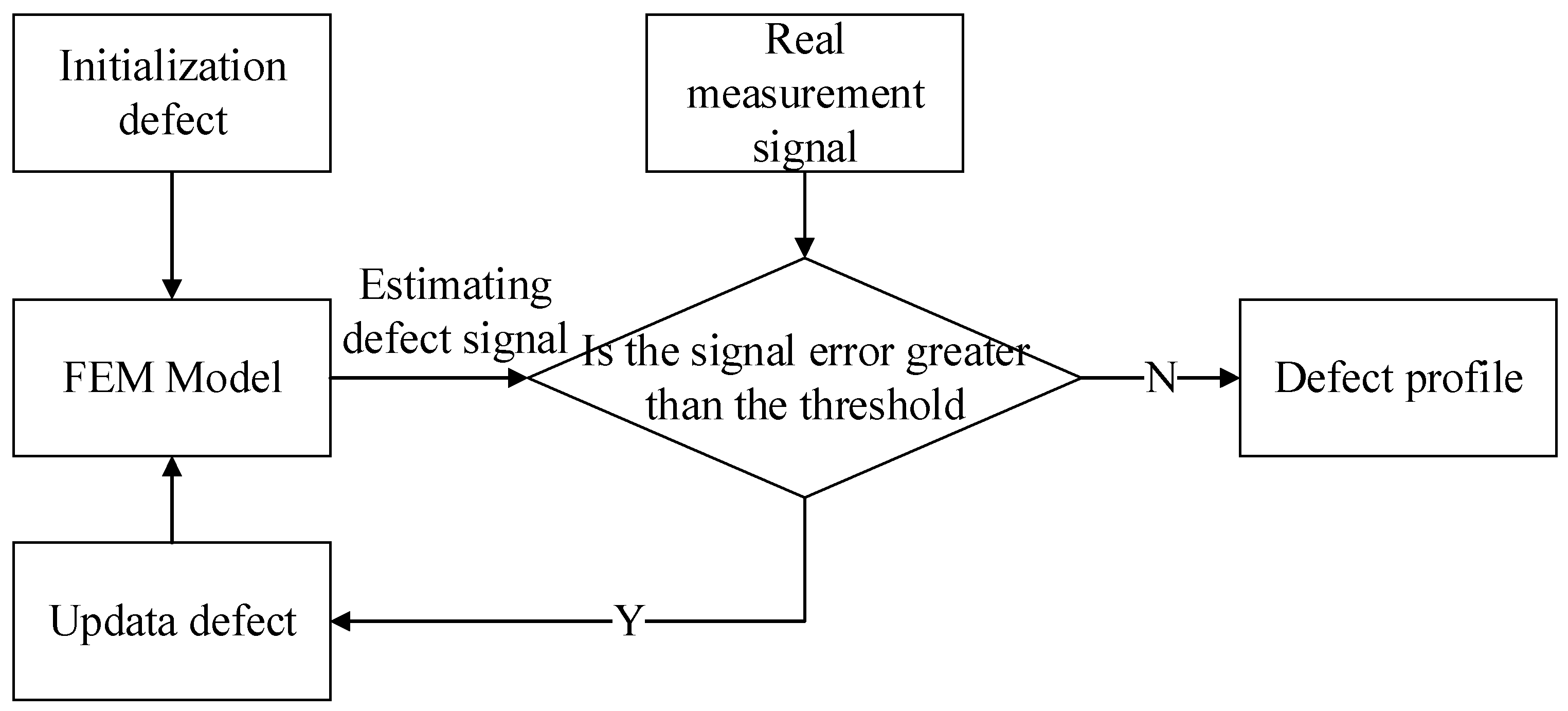
2.1. Defect Inversion Process
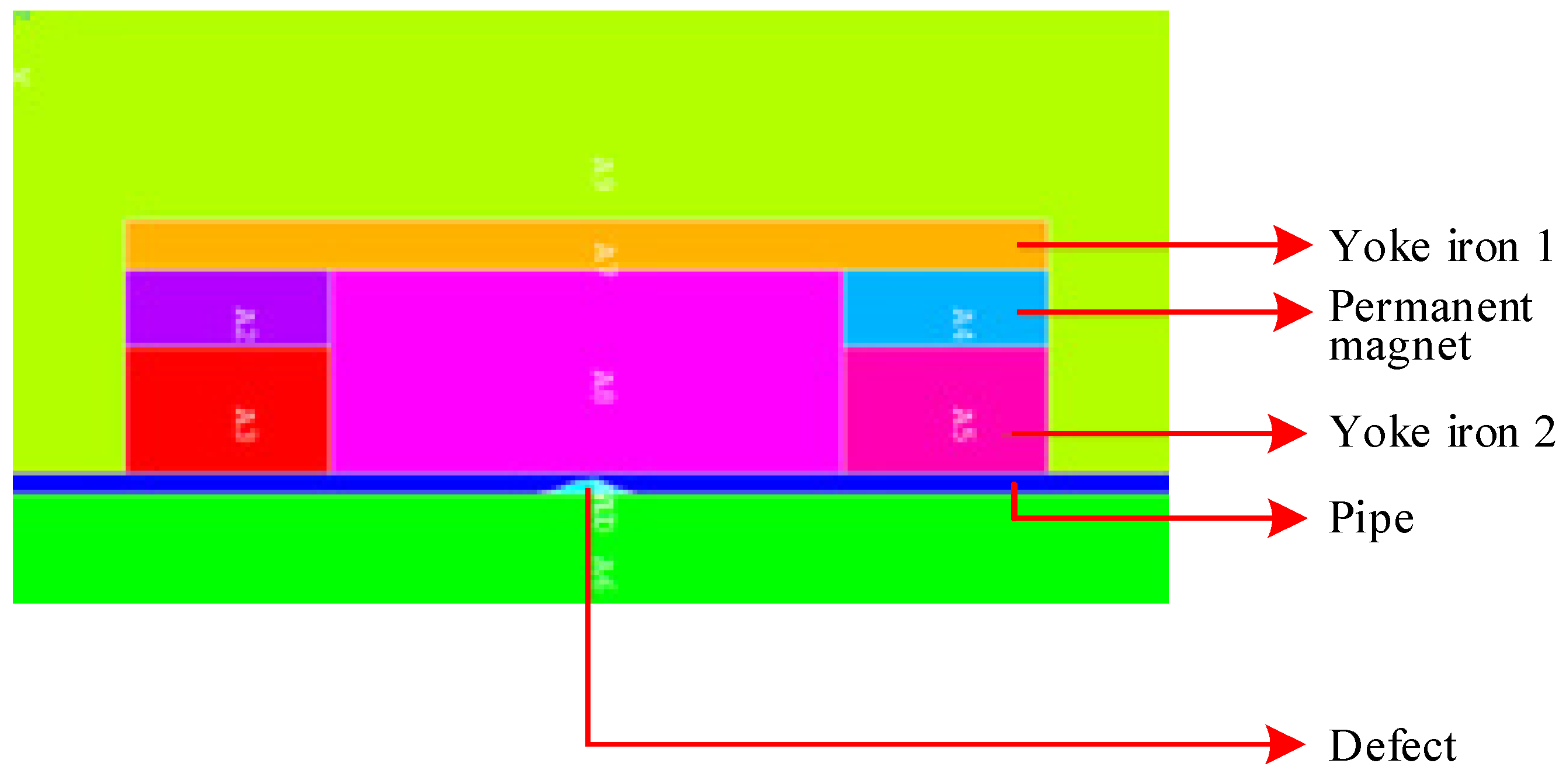
2.2. Forward Finite-Element Modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Materials | Coercive Force (Unit: KA/m) | Relative Permeability (Unit: 1) | Length (Unit: mm) | Height (Unit: mm) |
|---|---|---|---|---|---|
| Yoke Iron 1 | Iron DT4C | - | 5 × 10³ | 360 | 20 |
| Permanent Magnet | Neodymium 45 | 8.76 × 10² | 1 | 80 | 30 |
| Yoke Iron 2 | Iron DT4C | - | 5 × 10³ | 80 | 30 |
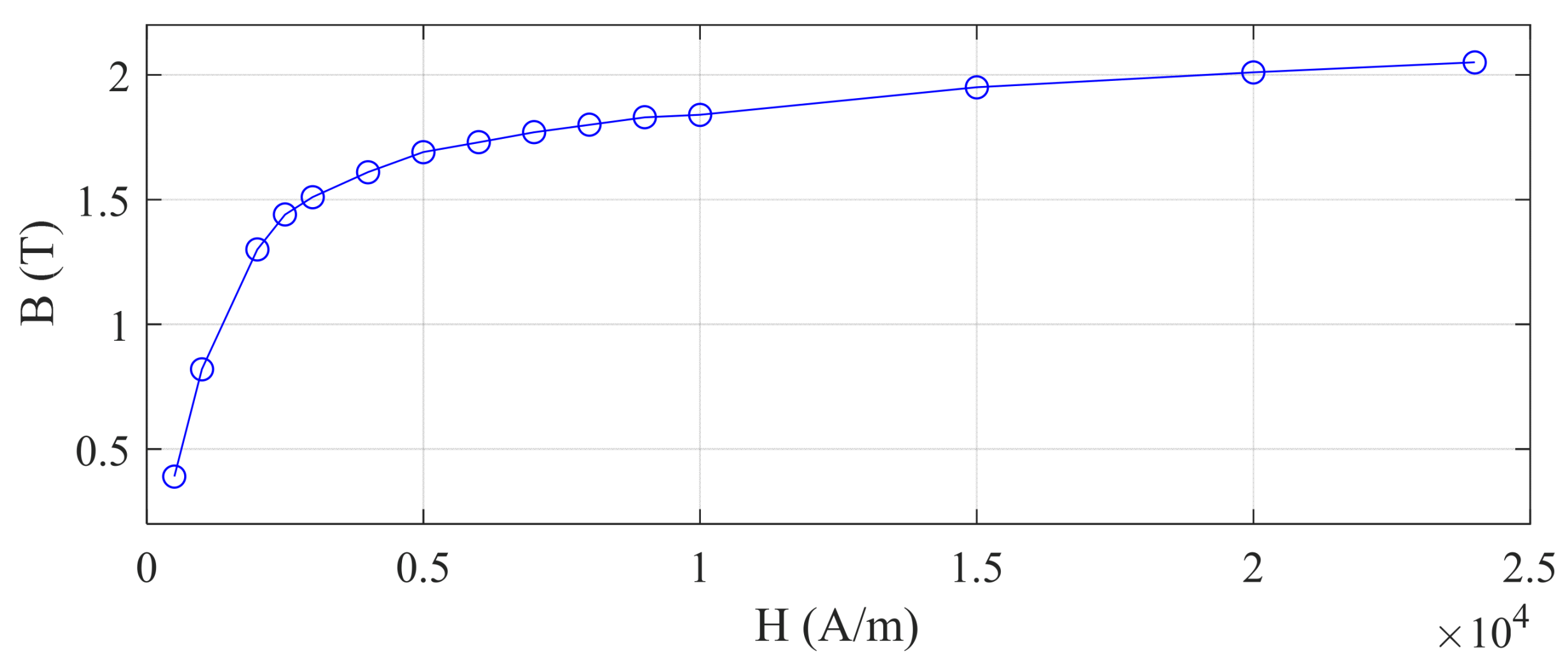
| Pipe | Steel X45 | - | BH curve in Figure 3 | 460 | 8 |
| Defect | Air | - | 1 | 40 | 7.5 |
3. FGC-PSO Algorithm for Defect Inversion
3.1. Basic Particle Swarm Optimization Algorithm
3.2. Fast Globally Convergent Particle Swarm Optimization Algorithm
3.2.1. Self-Adaptive Inertia Weight
3.2.2. Improved Speed Updating Strategy
3.3. Defect Inversion Process Base on FGC-PSO Algorithm
4. Experiment and Analysis
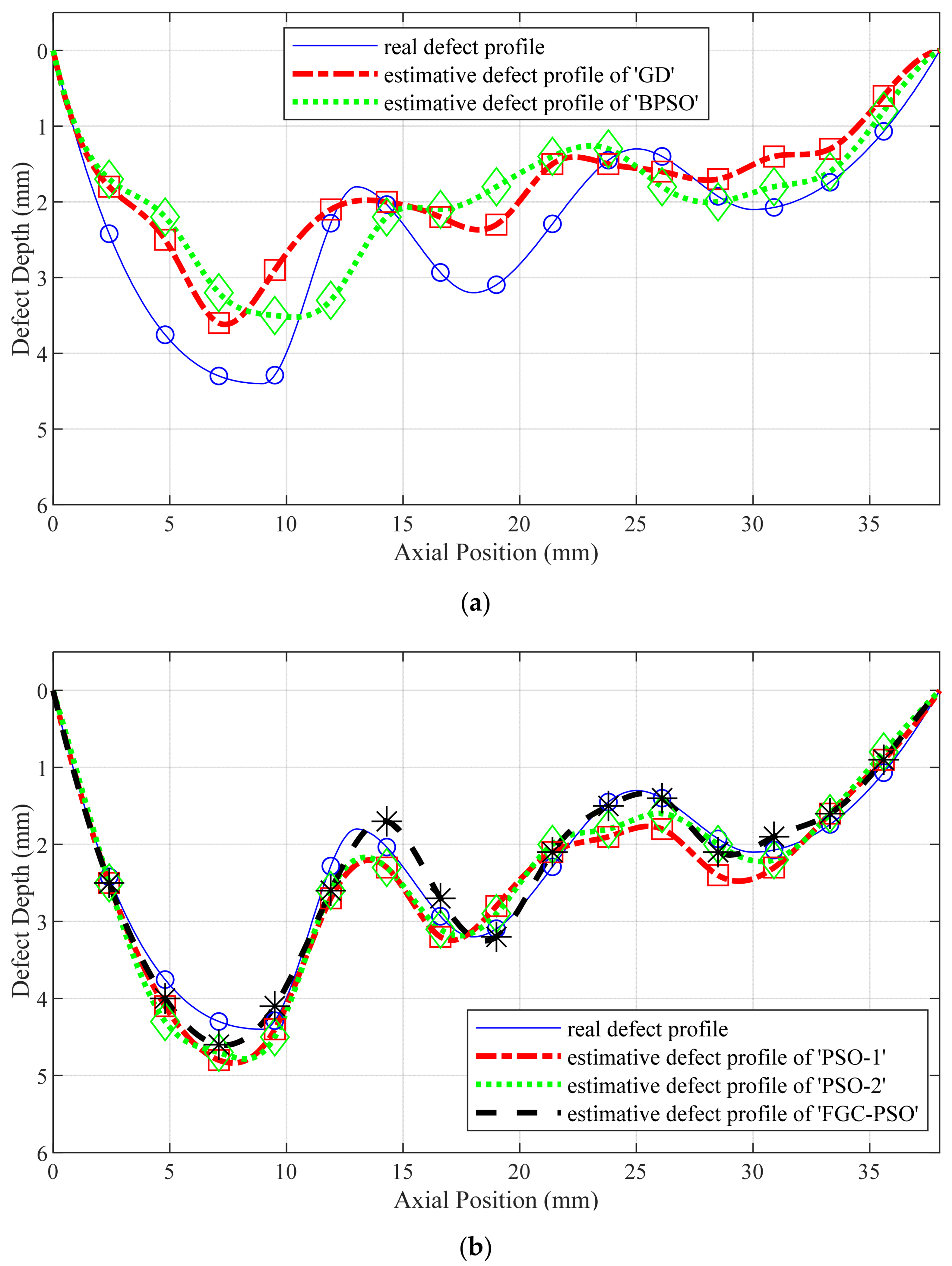
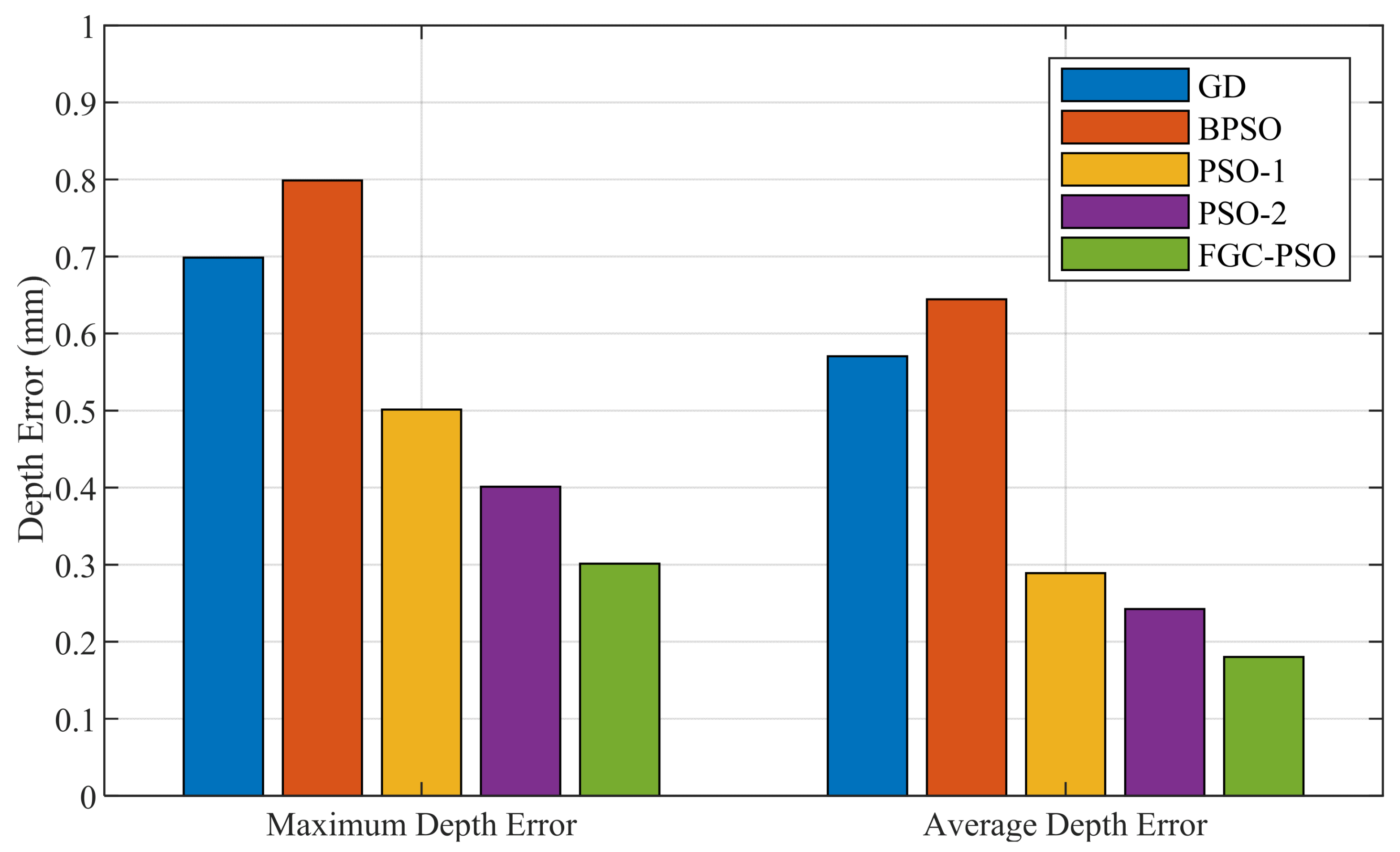
4.1. Comparison Experiment of Inversion Accuracy under Multi-DOFs
4.2. Convergence Contrast Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lang, X.; Han, F. MFL Image Recognition Method of Pipeline Corrosion Defects Based on Multilayer Feature Fusion Multiscale GhostNet. IEEE Trans. Instrum. Meas. 2022, 71, 5020108. [Google Scholar] [CrossRef]
- Feng, J.; Zhang, X.; Lu, S.; Yang, F. A Single-Stage Enhancement-Identification Framework for Pipeline MFL Inspection. IEEE Trans. Instrum. Meas. 2022, 71, 3513813. [Google Scholar] [CrossRef]
- Jiang, L.; Zhang, H.; Liu, J.; Shen, X.; Xu, H. A Multisensor Cycle-Supervised Convolutional Neural Network for Anomaly Detection on Magnetic Flux Leakage Signals. IEEE Trans. Ind. Inform. 2022, 18, 7619–7627. [Google Scholar] [CrossRef]
- Kandroodi, M.R.; Araabi, B.N.; Bassiri, M.M.; Ahmadabadi, M.N. Estimation of Depth and Length of Defects from Magnetic Flux Leakage Measurements: Verification with Simulations, Experiments, and Pigging data. IEEE Trans. Magn. 2017, 53, 6200310. [Google Scholar] [CrossRef]
- Han, W.; Shen, X.; Xu, J.; Wang, P.; Tian, G.; Wu, Z. Fast estimation of defect profiles from the magnetic flux leakage signal based on a multi-power affine projection algorithm. Sensors 2014, 14, 16454–16466. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Wang, C.; Ji, F.; Yuan, X. Finite-element neural network-based solving 3-D differential equations in MFL. IEEE Trans. Magn. 2012, 48, 4747–4756. [Google Scholar] [CrossRef]
- Li, M.; Lowther, D.A. The application of topological gradients to defect identification in magnetic flux leakage-type NDT. IEEE Trans. Magn. 2010, 46, 3221–3224. [Google Scholar] [CrossRef]
- Lu, S.; Feng, J.; Zhang, H.; Liu, J.; Wu, Z. An Estimation Method of Defect Size from MFL Image Using Visual Transformation Convolutional Neural Network. IEEE Trans. Ind. Inform. 2019, 15, 213–224. [Google Scholar] [CrossRef]
- Saha, S.; Mukhopadhyay, S.; Mahapatra, U.; Bhattacharya, S.; Srivastava, G.P. Empirical structure for characterizing metal loss defects from radial magnetic flux leakage signal. NDT E Int. 2010, 43, 507–512. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Wang, J.; Zuo, F.; Wang, J.; Liu, J. A Pipeline Defect Inversion Method with Erratic MFL Signals Based on Cascading Abstract Features. IEEE Trans. Instrum. Meas. 2022, 71, 3506711. [Google Scholar] [CrossRef]
- Li, F.; Feng, J.; Liu, J.; Lu, S. Defect profile reconstruction from MFL signals based on a specially-designed genetic taboo search algorithm. Insight-Non-Destr. Test. Cond. Monit. 2016, 58, 380–387. [Google Scholar] [CrossRef]
- Ramuhalli, P.; Udpa, L.; Udpa, S.S. Electromagnetic NDE signal inversion by function-approximation neural networks. IEEE Trans. Magn. 2002, 38, 3633–3642. [Google Scholar] [CrossRef]
- Hari, K.C.; Nabi, M.; Kulkarni, S.V. Improved FEM model for defect-shape construction from MFL signal by using genetic algorithm. IET Sci. Meas. Technol. 2007, 1, 196–200. [Google Scholar] [CrossRef]
- Lu, S.; Feng, J.; Li, F.; Liu, J. Precise Inversion for the Reconstruction of Arbitrary Defect Profiles Considering Velocity Effect in Magnetic Flux Leakage Testing. IEEE Trans. Magn. 2017, 53, 6201012. [Google Scholar] [CrossRef]
- Li, Y.; Udpa, L.; Udpa, S.S. Three-dimensional defect reconstruction from eddy-current NDE signals using a genetic local search algorithm. IEEE Trans. Magn. 2004, 40, 410–417. [Google Scholar] [CrossRef]
- Bergh, F.V.D.; Engelbrecht, A.P. A cooperative approach to particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 225–239. [Google Scholar]
- Hsieh, S.T.; Sun, T.Y.; Liu, C.C.; Tsai, S.J. Efficient population utilization strategy for particle swarm optimizer. IEEE Trans. Cybern. 2009, 39, 444–456. [Google Scholar] [CrossRef] [PubMed]











| Algorithm Name | Number of Defects That Can Be Converged (Unit: Numbers) | Average Convergence Times (Unit: Times) |
|---|---|---|
| GD | 35 | 48.4 |
| BPSO | 28 | 53.3 |
| PSO-1 | 40 | 35.8 |
| PSO-2 | 40 | 30.2 |
| FGC-PSO | 40 | 15.3 |
| Algorithm Name | Number of Defects That Can Be Converged (Unit: Numbers) | Average Convergence Times (Unit: Times) |
|---|---|---|
| GD | 15 | 75.1 |
| BPSO | 8 | 87.0 |
| PSO-1 | 35 | 49.8 |
| PSO-2 | 33 | 38.1 |
| FGC-PSO | 40 | 23.9 |
| Algorithm Name | Number of Defects That Can Be Converged (Unit: Numbers) | Average Convergence Times (Unit: Times) |
|---|---|---|
| GD | 0 | - |
| BPSO | 0 | - |
| PSO-1 | 22 | 70.4 |
| PSO-2 | 20 | 65.8 |
| FGC-PSO | 40 | 35.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, S.; Liu, J.; Wu, J.; Fu, X. A Fast Globally Convergent Particle Swarm Optimization for Defect Profile Inversion Using MFL Detector. Machines 2022, 10, 1091. https://doi.org/10.3390/machines10111091
Lu S, Liu J, Wu J, Fu X. A Fast Globally Convergent Particle Swarm Optimization for Defect Profile Inversion Using MFL Detector. Machines. 2022; 10(11):1091. https://doi.org/10.3390/machines10111091
Chicago/Turabian StyleLu, Senxiang, Jinhai Liu, Jing Wu, and Xuewei Fu. 2022. "A Fast Globally Convergent Particle Swarm Optimization for Defect Profile Inversion Using MFL Detector" Machines 10, no. 11: 1091. https://doi.org/10.3390/machines10111091
APA StyleLu, S., Liu, J., Wu, J., & Fu, X. (2022). A Fast Globally Convergent Particle Swarm Optimization for Defect Profile Inversion Using MFL Detector. Machines, 10(11), 1091. https://doi.org/10.3390/machines10111091