1. Introduction
Leg Length Discrepancy (LLD), also known as anisomelia, is a condition of noticeably unequal length of the paired lower extremity limbs that is commonly caused by congenital, developmental, or posttraumatic conditions, such as trauma from birth, the malformed socket of the hip joint, and arthritis of the joints [
1]. Abnormal growth, hip dysplasia, scoliosis, limping, back pain, and osteoarthritis have been deemed the complications of LLD [
2]. Guichet et al. found that 0.1% of the population went for surgery when the difference in leg length exceeded 2 cm [
3]. Generally, the methods frequently used in the clinical treatment of LLD include non-surgical treatment (wearing a shoe lift) and surgical treatment (shortening longer limbs or lengthening shorter limbs) [
4]. However, limb shortening is disallowed in some instances since it leads to muscle weakening.
An orthopedic surgeon, Gavriil A. Ilizarov, proposed the theory of tensions, which has become the fundamental principle in limb lengthening and reshaping treatment. According to this theory, the Ilizarov external fixator was widely promoted in the 1980s and gradually became the primary treatment apparatus in this field, which showed revolutionary results [
5]. However, the Ilizarov external fixator has accentuated the problem of inconvenience and discomfort that may cause certain complications such as pin site infection, axial deviation, joint stiffness, soft tissue incarceration, and delayed union of the docking site [
6,
7,
8,
9]. As a result, an implantable lengthening nail (ILN) [
10] was invented to solve these issues.
The implantable lengthening nail is a kind of intramedullary distraction device that has been widely used in limb lengthening and replaced the mainstream therapy apparatus due to its effectiveness in treating LLD without complications. The first implantable lengthening nail, the Bliskunov intramedullary nail, was driven by a mechanical ratchet system and controlled via the rod bolted to the pelvis [
5]. Baumgart et al. proposed a motorized implantable lengthening nail with a subcutaneous antenna, where the electric currents for powering the motor are generated via an induction method [
11,
12]. However, the wire between the antenna and the motor might fail to function due to daily routine or tissue fluid corrosion.
The Orthofix company designed an implantable lengthening nail, the Intramedullary Skeletal Kinetic Distractor (ISKD), which has a magnet encased within the tip of the threaded rod showing a new driving mechanism concept. However, the Food and Drug Administration (FDA) banned ISKD from the market because of its unstable and uncontrollable distraction rate [
13,
14,
15,
16,
17]. A. Soubierian proposed an internal rotating magnet implantable lengthening nail (Phenix) driven by the circular motion of a hand-held magnet around the limb. Even though Phenix demonstrates outstanding clinical results, it is less known [
18].
The NuVasive company designed an internal magnet implantable lengthening nail and two external magnets housed in a computer-controlled power assembly. PRECICE (P1), a welded-split structure implantable lengthening nail, was the first implantable lengthening nail marketed in the United States. However, P1 was unbearable for weight-bearing, resulting in a rift appearing at the welding part after implantation [
16]. Therefore, an upgrade version of P1, PRECICE2 (P2), utilized a seamlessly connected structure, giving higher bending strength than P1 [
10,
17]. P2 achieved great accomplishment in LLD clinical treatment but still had some shortcomings, e.g., full weight-bearing before the consolidation phase is prohibited and temporarily decelerating or stopping distraction [
19,
20]. NuVasive’s latest and largest weight-bearing implantable lengthening nail, PRECICE STRYDE, allowed the patient to proceed with their daily routine quicker. Yet, its material was unendurable to tissue fluid, and its non-hermetically seal design corroded the internal and external of the implantable lengthening nail [
21,
22,
23,
24]. Despite its remarkable success, several problems still exist in PRECICE, such as insufficient rigidity, unreliable distraction rate, and material corrosion.
In this study, we propose an implantable lengthening nail based on an electromagnetic configuration, Intramedullary Skeletal Distractor Robot (ISDR). ISDR possesses a high reduction ratio (exceeding 150), large distraction force (exceeding 1000 N), and sturdy structure stiffness characteristics for treating LLD. The essay is organized in the following way.
Section 2 describes the electromagnetic configuration synthesis in terms of the human lower extremity and presents the conceptual design of the ISDR. Next,
Section 3 investigates the mechanical stiffness and distraction forces that commonly trouble the clinician during limb lengthening.
Section 4 shows the simulation and experiment results of the designed ISDR, while
Section 5 optimizes the electromagnetic properties. Finally,
Section 6 concludes.
2. Configuration Synthesis of ISDR
In this section, the configuration synthesis of ISDR is investigated by setting its design guidelines based on lower extremity characteristics for conceptual design.
2.1. Design Guidelines for ISDR Based on Human Lower Extremity Characteristics
According to medical reports, the diameter of the femur in Asian men is 11.08 ± 1.9 mm, the length of the femur is 418 ± 20 mm, and the circumference of the thigh is 53.9 ± 6.3 cm [
25,
26]. Ji et al. showed that the frequency of men walking has a range of 1.77 ± 0.36 Hz [
27]. The values of the lower extremity are chosen nearly to their extreme value for general purpose (listed in
Table 1).
Generally, the human walking gait cycle is divided into six phases: heel strike (HS), foot-flat (FF), mid stance (MS), heel-off (HO), toe-off I (TO-I), and toe-off II (TO-II) [
28] (shown in
Figure 1). The maximal force occurs during the MS phase, around 40% to 60% of the stance phase [
29]. Based on this, we estimate the forces acting on the femur in three directions (frontal force, lateral force, and axial force) among six phases, as listed in
Table 2.
On the basis of these prerequisites, the priority of ISDR design guidelines is the body characteristics. After setting design guidelines, the driving method becomes our main concern. Although magnetic configurations achieve massive success in treating LLD, the limitation of external magnets is that their properties are unadjustable in various cases. Therefore, in this study, electromagnetic configurations are used in designing ISDR.
2.2. Conceptual Design of ISDR
The configuration of the intramedullary lengthening nail system includes two parts: an implantable lengthening nail implanted inside the medullary canal and an internal magnet driver placed outside the limb. The internal magnet driver generates rotating magnetic fields that spin the permanent magnet of the implantable lengthening nail to endow a force for bone distraction.
Clinicians make an incision near the hip joint and femoral shaft before implanting the implantable lengthening nail into the limb. Then, they use a cannulated drill to enlarge the medullary canal to facilitate implantation. After completing the enlargement procedure, they apply an osteotomy by using the osteotome, followed by the insertion of the implantable lengthening nail into the medullary canal and fixed tightly by bone screws at both the upper and lower ends. Once the clinicians complete implantation surgery, they can place the internal magnet driver near the limb to drive the implantable lengthening nail magnet for treating LLD.
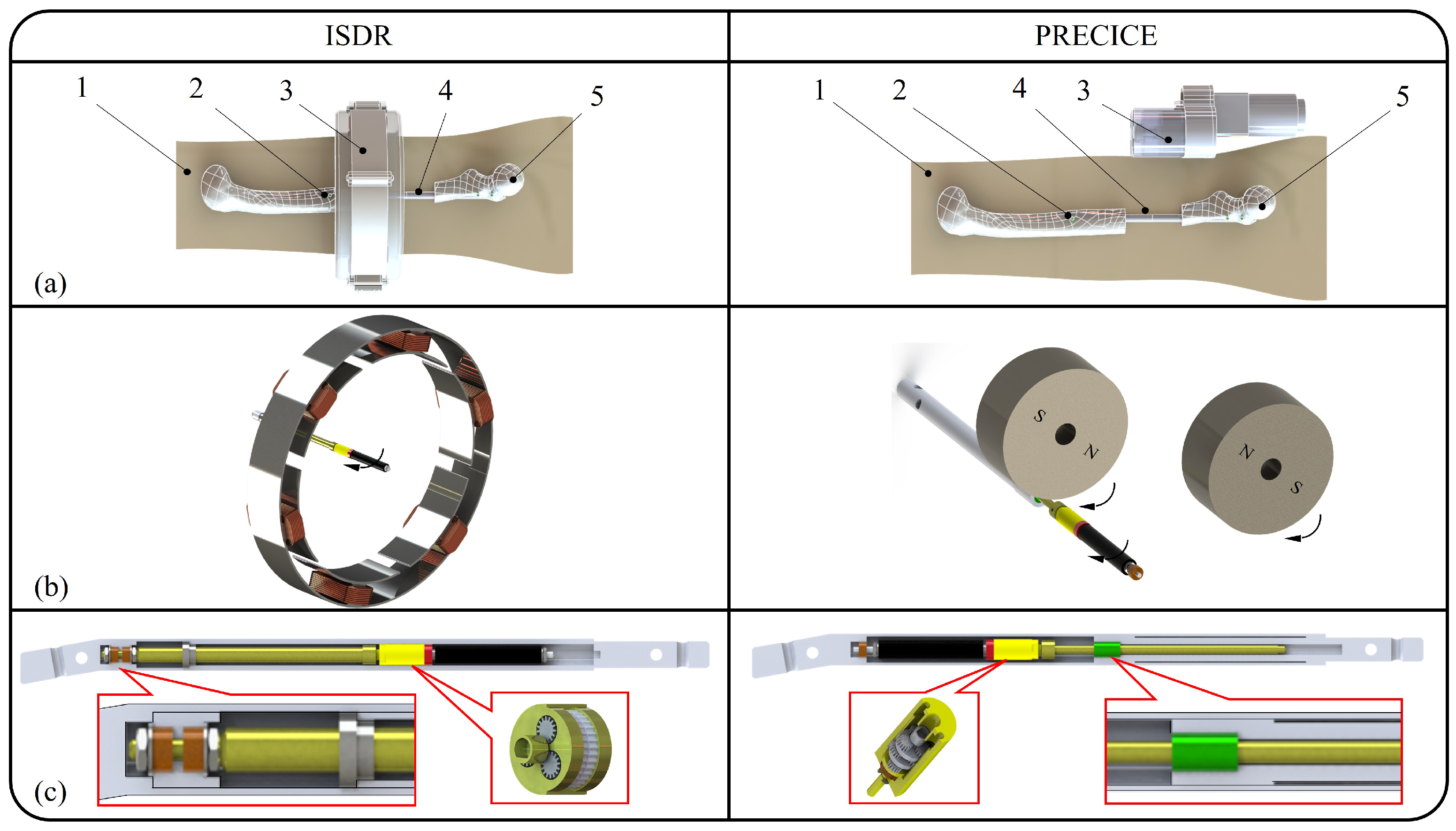
There are some differences between ISDR and PRECICE (
Figure 2a–c). PRECICE places its permanent magnet near the proximal femoral shaft, while ISDR places its permanent magnet near the distal femoral shaft. This design signifies that the air gap between the permanent magnet and the driver is minor, revealing the driving torque for the bone distraction is much more stable and forceful. Moreover, the transmission component of ISDR has a longer lifespan compared to PRECICE because the transmission of the axial load from the distraction nail towards the thrust bearing and protective shell occurs without passing through the gearbox. Last but not least, the distraction force of ISDR is adjustable and controllable by tuning the electromagnetic driver parameters akin to the Permanent Magnet Brushless Direct Current (PMBLDC) motor model.
2.2.1. Implantable Lengthening Nail
Figure 3 illustrates that the proposed implantable lengthening nail distraction mechanism is well-protected by a protective shell. The mechanical stiffness of implantable lengthening nail is guaranteed by a titanium alloy with good bio-compatibility (non-toxic and high resistance to oxidization), lightweight, and rigid characteristics, which is commonly used in surgical transplants [
30,
31,
32].
The implantable lengthening nail adopts a distraction structure design, where the distraction mechanism is placed within the distraction nail. The distraction mechanism consists of an internal permanent magnet, a gearbox that can be either a planetary gearbox or Rotate Vector (RV) gearbox, a lead screw, and its nut. The end of the lead screw is connected to the shafting system, which is fit or screwed tightly into the protective shell. This design provides a rotational degree of freedom for the lead screw, and its nut moves freely along with the distraction nail inside the protective shell since they are transition fit. The screw holes are designed in conventional patterns at both ends of the protective shell and distraction nail for fixation on the extremity medullary canal.
Once the electromagnetic driver is energized, the rotating magnetic field starts to drive the internal permanent magnet to rotate. The driving torque is amplified by the gearbox and transmitted to the lead screw. The thrust bearing is placed on the shafting tube so that the axial load acts directly on the protective shell without passing through the distraction mechanism. The distal bone begins to distract with the assistance of the distraction nail, meaning bone lengthening occurs as long as sufficient torque is provided.
2.2.2. Electromagnetic Driver
The electromagnetic driver acts as a PMBLDC motor stator group, providing the external rotating magnetic field required to drive the internal permanent magnet, as shown in
Figure 4.
The electromagnetic driver mainly consists of a stator core, self-tapping screws, nylon protective layers, and copper wire coils. The electromagnetic driver is designed as a tuck-in design for the convenience of wearing. The stator core and middle nylon protective layer are attached firmly by screwing them together with the self-tapping screws. The function of the nylon protective layer is to prevent the sharp edges of silicon steel sheets from accidentally cutting the patient or current leakage. Copper wire coils wind around the stator core slot with a distributed half-coiled pattern. The upper and lower nylon protective layers are screwed after winding, forming a closed ring structure.
5. Optimization of the Electromagnetic Driver Design
Although the driving torque is sufficient for bone distraction, there are sacrifices in the electromagnetic driver’s overall weight and power loss. Therefore, the genetic algorithm (GA) procedure is introduced to achieve the optimal value of driving torque.
5.1. Problem Formulation
The goal is to find the optimum geometric parameters by minimizing the objective function when the requirements are satisfied. The main emphasis of electromagnetic drivers is driving torque capability, followed by the apprehension of wearable design overall weight and the PMBLDC motor model power loss. In addition to these criteria, other objectives such as magnetic flux leakage and cogging torque minimization are also suitable for optimization.
Generally, the objectives are reorganized into a mathematical expression as a function of geometric parameters. As mentioned above, these objective variables are driving torque (
), overall weight (
), and power loss (
). The driving torque of the electromagnetic driver is reconstructed as a relation with geometric parameters by referring to Equations (5)–(7):
where
. These geometric parameters are further replaced by back iron length (
), number of slots (
), and tooth width (
) as is shown in Equations (8)–(12). Hence, these basic parameters and the copper wire diameter (
) are selected as the variables of driving torque, namely the genes in a chromosome for the GA procedure.
The overall weight of the electromagnetic driver is obtained by summing the mass of the stator core and the copper winding together, after multiplying steel density and copper density with their volume, respectively. Since the dimensions of the stator core and copper winding rely on the electromagnetic driver geometry, the following expression is written:
where
is the mass of silicon steel sheet,
is the mass of copper winding,
is the density of silicon steel sheet, and
is the density of copper. After that, the substitution of variables is conducted to achieve the identical variable as the driving torque.
On the other hand, power loss of the PMBLDC motor model is divided into three categories: electrical, magnetic, and mechanical [
45]. Mechanical loss is negligible in the power loss since efficiency loss in the planetary gearbox and safety factors were previously considered in the lifting torque. Thus, electrical loss and magnetic loss are discussed here. Electrical loss originates from the resistance of copper winding as well as magnetic loss comes from hysteresis and eddy current losses, which vary nonlinearly with frequency and magnetic flux density [
44]. The power loss is obtained through the summation of electrical loss and magnetic loss, as shown in the equation below.
and
where
is the electrical loss,
is the magnetic loss,
is the resistivity of copper,
is the core loss of silicon steel,
v is the source voltage, and
r is the resistance of each phase. The geometric parameters are changed to typical variables in driving torque.
5.2. Optimization Procedure
5.2.1. Objective Functions
The optimization variables that need to be optimally discovered are selected and represented as a vector of
x. As the previous section mentioned, the basic parameters are chosen as the optimization variables, which can be written as follows:
The lower and upper bound values of each variable are set, which are denoted as
and
, respectively. The pattern of an objective function may vary according to the application and requirement of the PMBLDC motor. In this paper, the objective function comprises the overall weight, power loss, and inverse of the driving torque that are meant to be minimized. Both weighting factors and normalization are considered in the objective function to adjust the significance of each objective and scale their values to an equivalent order of magnitude.
where
,
and
are the weighting factors,
,
and
are the randomization values of driving torque, overall weight and power loss, respectively.
Apart from determining the objective function, constraints are added based on the PMBLDC motor limitations of heat, electrical and mechanical energy. Since the copper wire diameter is an optimization variable, the source current is set as an inequality constraint that satisfies the allowable current for a particular wire gauge. Hence, the following objective function is rewritten as [
45]:
where
is a small constant,
is the allowable current for a specific wire gauge, and
where
is a large constant. The penalty function is introduced in Equation (
24) to override the multi-objective function result whenever
exceeds
giving larger values that deviate from the local or global optimum.
5.2.2. Genetic Algorithms
GA is an evolutionary algorithm that aims to find the optimal solution based on inspiration from a natural selection such as selection, crossover, and mutation, which are discovered in nature [
46]. An individual represents the solution domain, and a fitness function evaluates the solution domain.
First, the values of the objective parameters are randomly selected within their limits to form the initial populations for minimizing the objective functions by examining the fitness value. If the fitness value satisfies the stopping criterion, the procedure ends immediately. On the contrary, new populations are formed by selection, crossover, and mutation in each generation and adopted in the upcoming iterations until the fitness value is optimally found or reaches the maximum number of iterations. The fittest parameters are utilized in the electromagnetic driver to promote its performance. The flowchart of a simple GA procedure is shown in
Figure 12.
5.3. Optimization Result
Before solving the optimization problem, the constant parameters and optimization technical parameters needed for initialization of the objective function are listed in
Table 7. The lower and upper bounds of the optimization variables are confirmed, which contributed to the optimum value, see
Table 8. Other characteristics of the optimized stator core are listed in
Table 9. The geometric parameters and variables from the GA procedure are utilized in the simulation and gave the results shown in
Figure 13 and
Table 10.
As attested by the results, the performance of the electromagnetic driver shows significant improvement in driving torque and power loss by adjusting the stator core slot area, the number of turns, and the copper wire diameter. Nevertheless, the total weight increases but is still in the acceptable range. Moreover, we notice that the start-up takes more time than the previous one, but it is not the primary concern. Overall, the electromagnetic driver becomes more efficient than before optimization.
6. Conclusions
In this paper, we proposed an inverted distraction structure design implantable lengthening nail where the internal permanent magnet is placed nearer to the distal femoral shaft, which enables it to receive the driving torque without effort. Furthermore, the magnetic configuration is substituted with an electromagnetic one for ease of controlling the driving torque required for bone distraction. To this end, we designed an implantable lengthening nail and its electromagnetic driver based on the human lower extremity. Then, the mechanical stiffness of the implantable lengthening nail is verified by simulating the human walking gait cycle granting us a value of nearly 950 MPa. Next, the lifting torque required for the implantable lengthening nail to conduct bone distraction is calculated, followed by analyzing and experimenting with the driving torque of the electromagnetic driver. Lastly, the parameters of the electromagnetic driver are adjusted via the genetic algorithm to improve its driving torque to 9 Nmm, which is increased by 8.89% compared with the trial and error method.
In conclusion, the proposed ISDR meets the requirements that clinicians are eager for, but a crutch is recommended to avoid unpredictable accidents. In future works, we will manufacture the prototype of ISDR and verify its capability. In addition, an animal experiment will be conducted to prove its effectiveness in treating LLD.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}