Abstract
This study explores the development of fixed-point results in the setting of the recently proposed double-composed metric spaces. We establish conditions ensuring both existence and uniqueness of fixed points for several types of contractive mappings defined on such spaces. To enrich the analysis, the space is further equipped with a graph structure through the use of concepts from graph theory, leading to the formulation of two novel fixed-point theorems. An illustrative example is also provided to highlight the applicability and relevance of the obtained results.
MSC:
47H10; 54H25; 54E50
1. Introduction
Fixed-point (FP) theory constitutes a fundamental pillar of mathematical analysis, serving as a powerful framework for the systematic study of mappings and their structural properties in a wide range of mathematical spaces. Among the classical results in this area, the Banach FP theorem [1]—commonly referred to as the Contraction Mapping Theorem—holds a distinguished position as perhaps the most celebrated result within the theory of metric spaces. The significance of this theorem transcends its original formulation, as it has inspired a vast body of research devoted to its refinement, extension, and application across diverse mathematical and applied contexts. In particular, the last few decades have witnessed an intensification of efforts aimed at exploring FP results within increasingly sophisticated and generalized structures, thereby motivating the development and investigation of FP theorems across various classes of metric spaces [2,3,4,5,6,7,8,9]. For instance, Jiang et al. [10] examined generalized contractive mappings in complete metric spaces, providing new insights into their fixed-point behavior and extending classical results to broader contexts. Similarly, Panda et al. [11] introduced novel approaches for solving nonlinear integral equations through various contractions, illustrating the practical applicability of FP theory in analytical problems. Additionally, George et al. [12] studied rectangular b-metric spaces, establishing contraction principles that further generalized conventional metric space frameworks and opened new avenues for theoretical exploration.
These developments in generalized metric spaces highlight the theoretical significance of FP theory while opening avenues for applications in geometrically and physically motivated contexts. In fact, by examining how geometric structures influence the existence and properties of fixed points, mathematicians gain deeper insights into both theoretical constructs and practical systems. A notable application is in satellite dynamics, where fixed points are essential for understanding the equilibrium positions of satellites under gravitational forces. The geometric configuration of these points aids in designing stable orbits and predicting satellite behavior. A prominent application was introduced by Joshi et al. [13], where a satellite web coupling was idealized as a thin sheet connecting two cylindrical satellites. The study of radiation from the web coupling between satellites leads to a nonlinear boundary value problem, which can be effectively analyzed using appropriate FP theorems in S-metric spaces. Also, Khan et al. [14] applied fixed-point results in fuzzy S-metric spaces to solve this satellite web coupling problem.
Moreover, the versatility of FP theory extends beyond geometric and physical systems, finding powerful applications in graph theory, where it helps analyze network structures and study mappings on graphs. Indeed, the interplay between FP theory and graph theory has garnered increasing attention, leading to new insights and advancements in both fields. By endowing metric spaces with graph structures, researchers can explore the dynamics of mappings in a more flexible and nuanced manner. For instance, Samreen et al. [15] propose several notions of contraction mappings in b-metric spaces endowed with a graph G, and, using these concepts, they establish corresponding FP results for these classes of contractions. Building on the applicability of their framework, they also derive FP theorems for cyclic operators and prove an existence theorem for the solution of a specific integral equation. In this setting, Souayah et al. [16] introduce the concept of the -contraction principle and establish a series of FP theorems within the framework of M-metric spaces endowed with a graph. In addition, the existence and uniqueness of FPs for such contractions are rigorously investigated. Several related contributions and applications have been reported in the following studies [17,18,19,20].
This approach allows for the examination of not only the distances between points but also the relational properties captured by graphs, such as connectivity and directedness. The significance of this intersection is underscored by its diverse applications across various disciplines, including computer science, optimization, and social network analysis. For instance, in network theory, FPs can represent stable states of dynamic systems, while in optimization, iterative methods for finding solutions can be effectively modeled as traversals of graphs.
One of the new metric spaces recently introduced is the double-composed metric spaces introduced in [21]. A new triangle inequality was proposed with the form for all , where the control functions are composed with the metric in the triangle inequality.
This paper is devoted to establishing novel FP theorems within the framework of double-composed metric spaces and to extending these results to settings in which the underlying space is endowed with a graph, in accordance with the framework proposed by Jachymski [22]. By connecting these two domains, we strive to deepen insights into FPs on graphs, paving the way for further theoretical developments and real-world applications.
2. Preliminaries
In 2020, Abdeljawad et al. [23] presented the notion of the double-controlled metric spaces (this serves as an extension of controlled metric spaces) as follows:
Definition 1.
Let be a nonempty set, and . A function is called a double-controlled metric-type space if it satisfies
- 1.
- if and only if for all ;
- 2.
- for all ;
- 3.
- for all .
The pair is a said to be double-controlled metric-type space.
Inspired from the double-controlled metric spaces, recently, Irshad et al. [21] introduced double-composed metric spaces with a new triangle inequality using control functions as follows:
Definition 2
(DCM) [21]). Let be a nonempty set, and consider the two non-constant functions . A function is said to be a double-composed metric if it satisfies
- 1.
- ⟺ for all ;
- 2.
- for all ;
- 3.
- for all .
The pair is a called double-composed metric space ().
Remark 1.
Every metric space can be considered a DCM with the control functions . However, the converse does not always hold, as illustrated by the following example.
Example 1
([21]). Let and are defined by . Define a function by
Then, is a with control functions and , but it is not a metric space.
From Example 1, DCMs need not be metric spaces; however, every DCM with sub-additive control functions gives rise to a metric space in the following manner.
Proposition 1
([21]). Let be a DCM, with being two non-constant sub-additive control functions. Define a function by
Then, is a metric space.
Example 2.
Let . Define function as follows:
Define a function by
Then, is a DCM with the control functions and .
Proof.
The first and second assumptions in Definition 2 are straightforward to verify. Let us prove the triangle inequality. For all , we have
On the other hand, consider the function for . Using variational calculus, we obtain ; that is,
From (1) and (2), we obtain
The inequality (3) proves the triangle inequality. Then, is a . □
Now, the topology of the DCM is defined as follows:
Definition 3
([21]). Let be a DCM. For each sequence , we say
- 1.
- That a Cauchy sequence if exists and is finite;
- 2.
- That converges to ℏ if ;
- 3.
- That is complete if every Cauchy sequence in is convergent to some point in and is noted CDCM.
Proposition 2
([21]). Let be a DCM with two continuous and non-constant control functions such that . Then, the limit of every convergent sequence is unique.
3. Main Result
This section presents some of the main results, establishing new fixed-point theorems in CDCM. By leveraging the concepts of sequential and subsequential convergence, we provide sufficient conditions for the existence and uniqueness of FPs for various classes of mappings.
Definition 4.
Let be a CDCM, and is a mapping.
- 1.
- For each sequence , if is convergent, then also converges, and then g is called sequentially convergent.
- 2.
- For every sequence , if is convergent, then has a convergent subsequence, and then g is said to be subsequentially convergent.
Theorem 1.
Let be a CDCM with non-constant control functions . Let be a mapping such that is continuous, subsequentially convergent, one-to-one, and
for all and For , define a sequence by . Suppose that the following conditions are satisfied:
- 1.
- where , and and denote the composite functions.
- 2.
- and are non-decreasing functions and continuous with and for every and
- 3.
- is sub-additive, and for all .
Hence, has a unique FP.
Proof.
Let , and define a sequence in inductively as follows: . Set ; then we have,
which implies,
where as . It follows that
For every such that , using the triangle inequality, we have
Since the mapping is sub-additive, we get
Taking the limit as tend to infinity in (8) and using condition (1) from Theorem 1, we get
Consequently, the sequence is Cauchy in . Since the DCMS is complete, it follows that converges to a point ; that is,
Since is subsequentially convergent, then the sequence has a convergent subsequence denoted by such that
From the continuity of , it follows that
From (10) and (12), we conclude that . Then, by using the triangle inequality and (4), we get
Using the property of , we get
Since , we obtain
Let k tend to infinity in (13) and using the continuity of and , we obtain
Since , then . Then, . Since is one-to-one mapping, ; that is, u is an FP of .
Finally, let us prove the uniqueness of the FP. Let be two FPs of , then , and .
Therefore, . Since is one-to-one mapping, . □
Next, we consider an important special case of the general FP results established in Theorem 1, namely Kannan-type contractions, whose definition is given as follows.
Definition 5.
Let be a DCM. A self-mapping is said to be a Kannan-type contraction if there exists such that
It is easy to see that (14) is a special case of (4) introduced in Theorem 1. Indeed, it is sufficient to consider the mapping F as an identity mapping. Therefore, we can state the following FP result, namely, under the same conditions as in Theorem 1, the Kannan-type contraction on a CDCM has a unique FP.
Corollary 1.
Let be a CDCM with non-constant control functions . Let be a continuous mapping and
for all and For , define a sequence by . Suppose that the following conditions are satisfied:
- 1.
- , where , and and denote the composite functions.
- 2.
- and are continuous and non-decreasing functions with and for every and
- 3.
- is sub-additive and for all .
Therefore, T has a unique FP.
To conclude this section, we introduce a new class of mappings, known as -admissible mappings, which will be instrumental in formulating the final FP result.
Definition 6.
Let be a nonempty set, and . T is γ-admissible with respect to λ if
Notation:
We consider a new family such that
- is an upper semicontinuous mapping from right;
- For all , ;
- .
Using the notion of admissibility together with the family of functions , we are now able to formulate a general FP result. This theorem extends classical contraction principles to mappings that respect the -admissible structure, providing conditions for the existence and uniqueness of FPs in CDCM.
Theorem 2.
Let be a CDCM with non-constant control functions . Let . Suppose that the continuous mapping satisfies the following hypothesis:
- (i)
- T is γ-admissible with respect to λ;
- (ii)
- If and , then ;
- (iii)
- There exists such that ;
- (iv)
- The functions and are continuous.
Therefore, T has a unique FP.
Proof.
Since , there exists such that . Then, we can build the sequence in such that
Assume that for all ; otherwise, . Since and T is -admissible with respect to , we obtain that
By continuing the process as above, we have
By applying (ii), we get
Then, is a nonincreasing sequence. It follows that there exists such that
We claim that . Suppose that . Since is upper semicontinuous from the right using (20), we have
which is a contradiction. Then,
Let be such that for all . Suppose without loss of generality that . Using the triangle inequality, we obtain
Let tend to infinity, we obtain, using (22), Then, is a Cauchy sequence, and converges to some . Then, using the continuity of T, we obtain
Therefore, s is an FP of T. □
In the following section, we present applications of these general FP results. In particular, Section 4 is devoted to the case of graphic contractions, where the abstract theory developed here is applied in a graph-theoretic framework.
4. Fixed-Point Results for Graphic Contractions
This section provides an application of the main results established in Section 3 to the setting of graphic contractions where a DCMS is enriched with a graph structure. This connection illustrates the applicability of our main results beyond the purely theoretical setting and provides a concrete demonstration of their usefulness.
Before delving into FP results in graph theory within DCMs, it is important to recall some fundamental concepts from graph theory. These notions form the building blocks to understanding the more complex structures and results discussed later.
Notation: a graph G is defined as a pair of sets: , where
- V is the set of vertices (or nodes).
- E is the set of edges, where each edge is a pair of vertices.
Definition 7
([22]). Let G be a graph. A path between two vertices u and v in G of length q () is a sequence of distinct vertices such that , and , for .
Definition 8
([22]). Consider a vertex u in a graph G. The subgraph , which consists of all the vertices and edges that are part of some path in G starting at u, is referred to as the component of G that contains u. The equivalence class on the vertex set , defined by the relation R (where if there is a path from u to v), satisfies the property that the set of vertices in , denoted , is equal to .
Let be a CDCM. Graph G can be transformed into a weighted graph by assigning each edge a weight that corresponds to the distance between its vertices, given by the double-composed metric shown in Figure 1.
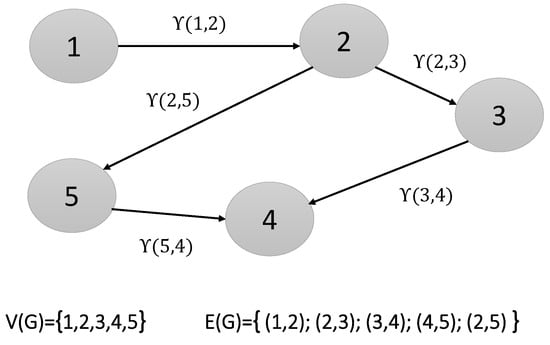
Figure 1.
Illustration of graph G.
Notation: we denote by .
Definition 9.
Let be a CDCM endowed with a graph G. The mapping is referred to as a contraction if it satisfies the following conditions:
- there exists a function such thatwhere ψ is a nondecreasing function, and for all .
Definition 10.
A mapping is said to be orbitally G continuous if, for all and any positive sequence ,
Theorem 3.
Let be a CDCM with non-constant control functions endowed with a graph G. Let be a contraction that is orbitally G continuous. We assume the following property : for any in , if and , then there is a subsequence with .
Additionally, suppose that the following conditions are satisfied:
- where and denote the composite functions.
- and are non-decreasing functions and continuous with , , which exist and are finite, and , for every and
- is sub-additive and for all .
Then, the restriction has a unique FP.
Proof.
Let , then or . Let us suppose w.l.o.g that . We derive through induction that
Thus, we have
Let ; using the triangle inequality, we get
Using (27), we obtain
Now, from (25) and (28), it follows that
Hence, the sequence is a Cauchy sequence. Exploiting the completeness of , there exists so that
We claim that u is a, FP of .
Since , , for every , then . From property a subsequence of exists such that for all .
Definition 11.
Let be a CDCM endowed with a graph G. The mapping is said to be a G contraction if the following hypothesis are fulfilled:
Theorem 4.
Let be a CDCM with non-constant control functions endowed with a graph G. Let be a G contraction that is orbitally G continuous. Suppose that the following property holds: for any in , if and , then there is a subsequence with .
Furthermore, suppose that the following conditions are met:
- where and denote the composite functions.
- is sub-additive.
Then, the restriction has a unique FP.
Proof.
Let ; then, or . We suppose without loss of generality that . We obtain by induction
Thus, we have
Let . By applying the triangle inequality and the sub-additivity of the function , and following a similar approach to the proof of Theorem 3, we obtain
Using (37), we obtain
Now, from (35) and (38), we infer that
Therefore, the sequence is a Cauchy sequence. Given the completeness , there exists such that
Let us prove that u is an FP of the restriction of f to .
Since , , for every , then . From property there exists a subsequence of such that for all .
On the other hand, a path G can be constructed by utilizing the points , which allows us to affirm that . Given the orbitally G continuity of f, we get
Hence, using (40) and (41), we deduce that u is a FP of .
Assume that there exist such that and . We have
Then, , and , hence the uniqueness of the FP. □
To illustrate the applicability of Theorem 4, we now present a concrete example within the setting of a DCMS.
Example 3.
Let . Define the functions by , for all .
We define a function by . Consider such that . Then, f has a unique FP.
Beyond demonstrating the existence and uniqueness result, this example highlights how the abstract framework can be applied in a concrete setting. Moreover, when interpreted in the context of the graph structure introduced in Section 4, the mapping f can be viewed as a contraction on a simple graph, thereby connecting the theoretical results with practical applications. This illustrates not only the theoretical significance of the theorem but also its potential use in modeling problems where metric and graph structures interact.
Proof.
Let us begin by proving that is a DCM. Indeed, it is easy to see that for all , and . Let , then we have
Since for all , we get
Then, is a DCM.
Now, let us verify the hypothesis of Theorem 4.
At first, note that . Then, (34) is satisfied.
Consider a graph G consisting of a set of vertices and . Then, f satisfies the preserving edge condition (33). Hence, is a G contraction. Moreover, f is orbitally G continuous since f is continuous and satisfies the property .
On the other hand, is a sub-additive function. Now, let us check hypothesis (35). We have
Hence, all the hypotheses of Theorem 4 are satisfied, which implies that f has a unique FP. □
5. Conclusions
In this paper, we explored double-composed metric spaces, a concept where the control functions are composed with the metric in the triangle inequality. Firstly, we established and proved some new FP theorems. Next, we investigated double-composed metric spaces endowed with a graph structure, a concept that blends the properties of metric spaces with the combinatorial and topological features of graphs. We presented two FP theorems and an example to illustrate the usefulness of our results. The results presented in this paper also have potential applications in a variety of domains. In particular, FP techniques may serve as powerful tools in network analysis, where they can be employed to study stability, connectivity, and equilibrium states of complex networks. Likewise, in distributed systems, such results can be utilized to analyze convergence behavior and synchronization in large-scale interconnected frameworks.
Future research on this metric could explore many contractions under different assumptions. Additionally, the investigation of graph theory in the context of metric spaces may lead to new insights into the geometry of spaces with non-trivial graph structures.
Funding
The authors would like to thank Ongoing Research Funding Program, (ORFFT-2025-056-1), King Saud University, Riyadh, Saudi Arabia for financial support.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Banach, S. Sur les opérations dans les ensembles abstraits et leur applications aux équations intégrales. Fundam. Math. 1992, 3, 133–181. [Google Scholar] [CrossRef]
- Jleli, M.; Karapınar, E.; Samet, B. Further generalizations of the Banach contraction principle. J. Inequalities Appl. 2014, 1, 439. [Google Scholar] [CrossRef]
- Souayah, N. A Fixed Point in Partial Sb-Metric Spaces. An. St. Univ. Ovidius Constanta 2016, 24, 351–362. [Google Scholar] [CrossRef]
- Souayah, N.; Mlaiki, N. A coincident point principle for two weakly compatible mappings in partial S-metric spaces. J. Nonlinear Sci. Appl 2016, 9, 2217–2223. [Google Scholar] [CrossRef][Green Version]
- Karlsson, A. A Metric Fixed Point Theorem and Some of Its Applications. Geom. Funct. Anal. 2024, 34, 486–511. [Google Scholar] [CrossRef]
- Zhou, M.; Ansari, A.H.; Park, C.; Maksimovic, S.; Mitrovic, Z.D. A new approach for fixed point theorems for C-class functions in Hilbert C-modules. Aims Math. 2024, 28850–28869. [Google Scholar] [CrossRef]
- Hammad, H.A.; Aydi, H.; De la Sen, M. Solving a Nonlinear Fractional Integral Equation by Fixed Point Approaches Using Auxiliary Functions Under Measure of Noncompactness. Int. J. Anal. Appl. 2024, 22, 53. [Google Scholar] [CrossRef]
- Shereen, I.; Kiran, Q.; Aydi, H. New complex (fuzzy) generalized metric spaces and an application to integral equations. Adv. Theory Nonlinear Anal. Its Appl. 2023, 5, 107–129. [Google Scholar]
- Chatterjea, S.K. Fixed-point theorems. Comptes Rendus Acad. Bulg. Sci. 1972, 25, 727–730. [Google Scholar] [CrossRef]
- Jiang, S.; Li, Z.; Damjanović, B. A note on Some fixed point theorems for generalized contractive mappings in complete metric spaces. Fixed Point Theory Appl. 2016, 2016, 62. [Google Scholar] [CrossRef]
- Panda, S.K.; Tassaddiq, A.; Agarwal, R.P. A New Approach to the Solution of Non-Linear Integral Equations via Various FBe-Contractions. Symmetry 2019, 11, 206. [Google Scholar] [CrossRef]
- George, R.; Radenovic, S.; Reshma, K.P.; Shukla, S. Rectangular b-metric space and contraction principles. J. Nonlinear Sci. Appl. 2015, 8, 1005–1013. [Google Scholar] [CrossRef]
- Joshi, M.; Tomar, A.; Abdeljawad, T. On fixed points, their geometry and application to satellite web coupling problem in S-metric spaces. Aims Math. 2023, 8, 4407–4441. [Google Scholar] [CrossRef]
- Khan, I.; Shaheryar, M.; Din, F.U.; Ishtiaq, U.; Popa, I.-L. Fixed-Point Results in Fuzzy S-Metric Space with Applications to Fractals and Satellite Web Coupling Problem. Fractal Fract. 2025, 9, 164. [Google Scholar] [CrossRef]
- Samreen, M.; Kamran, T.; Shahzad, N. Some Fixed Point Theorems in b-Metric Space Endowed with Graph. Abstr. Appl. Anal. 2013, 2013, 967132. [Google Scholar] [CrossRef]
- Souayah, N.; Mlaiki, N.; Mrad, M. The Gm-Contraction Principle for Mappings on an-Metric Spaces Endowed With a Graph and Fixed Point Theorems. IEEE Access 2018, 6, 25178–25184. [Google Scholar] [CrossRef]
- Acar, Ö.; Aydi, H.; De la Sen, M. New Fixed Point Results via a Graph Structure. Mathematics 2021, 9, 1013. [Google Scholar] [CrossRef]
- Mishra, A.; Raja, H. Study of Fixed-Point Results In G-Metric Space and G- Cone Metric Space and Its Application. In Proceedings of the 2024 OPJU International Technology Conference (OTCON) on Smart Computing for Innovation and Advancement in Industry 4.0, Raigarh, India, 5–7 June 2024; pp. 1–9. [Google Scholar]
- Zaslavski, A.J. Existence of a Fixed Point and Convergence of Iterates for Self-Mappings of Metric Spaces with Graphs. Symmetry 2024, 16, 705. [Google Scholar] [CrossRef]
- George, R.; Tamrakar, E.; Vujaković, J.; Pathak, H.K.; Velusamy, S. (C, Ψ*, G) Class of Contractions and Fixed Points in a Metric Space Endowed with a Graph. Mathematics 2019, 7, 482. [Google Scholar] [CrossRef]
- Ayoob, I.; Chuan, N.Z.; Mlaiki, N. Double-Composed Metric Spaces. Mathematics 2023, 11, 1866. [Google Scholar] [CrossRef]
- Jachymski, J. The contraction principle for mappings on a metric space with a graph. Proc. Am. Math. Soc. 2008, 136, 1359–1373. [Google Scholar] [CrossRef]
- Abdeljawad, T.; Mlaiki, N.; Aydi, H.; Souayah, N. Double Controlled Metric Type Spaces and Some Fixed Point Results. Mathematics 2018, 6, 320. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).