
A Comprehensive Study on the Applications of NTIM and OAFM in Analyzing Fractional Navier–Stokes Equations


Abstract
1. Introduction
2. Basic Definitions
3. Basic Procedure of Methods
3.1. Natural Transform Iterative Method
3.2. Optimal Auxiliary Function Method
4. Solving Fractional Order Navier–Stokes Equations
4.1. NTIM Solution
4.2. OAFM Solution
4.3. NTIM Solution
4.4. OAFM Solution
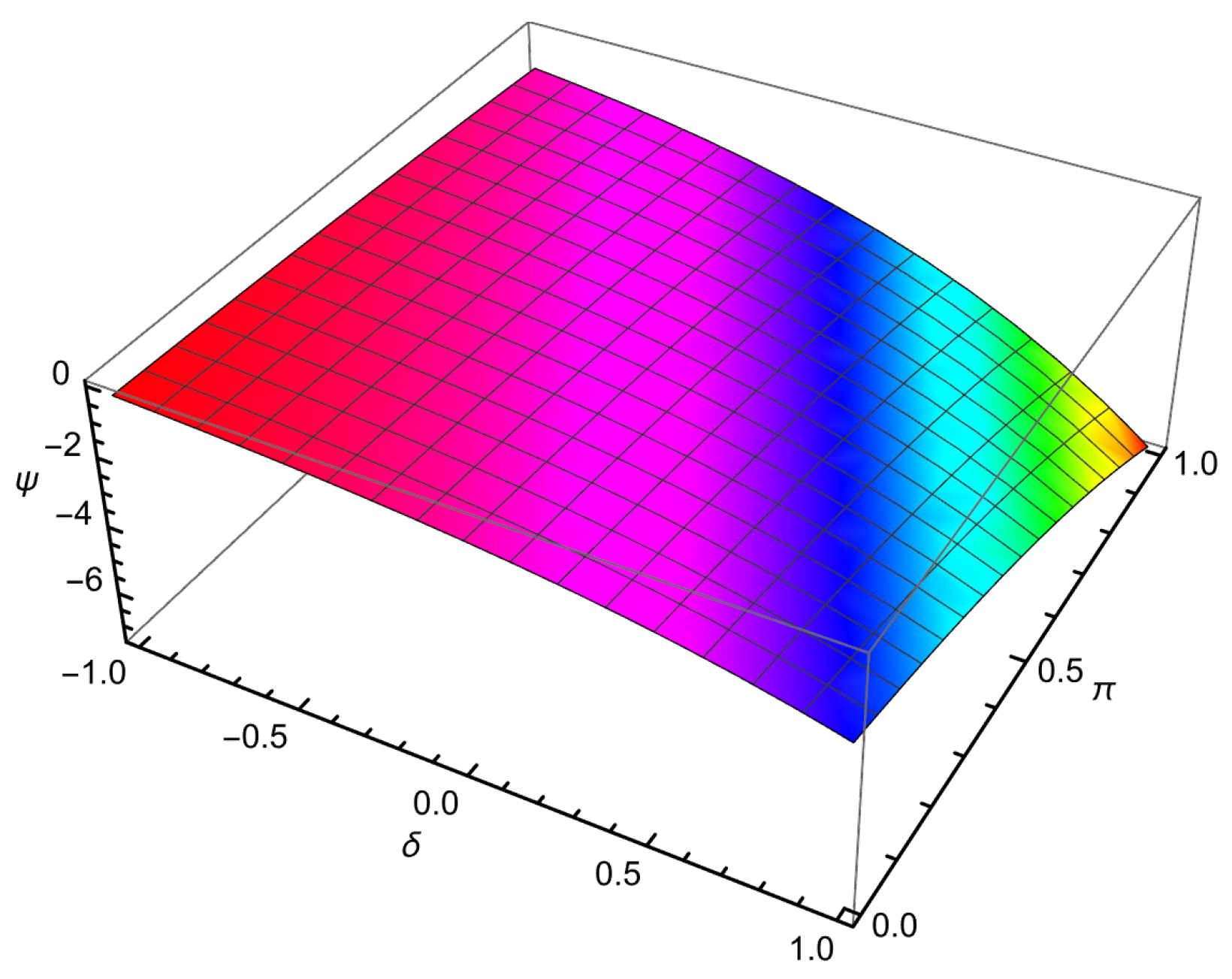
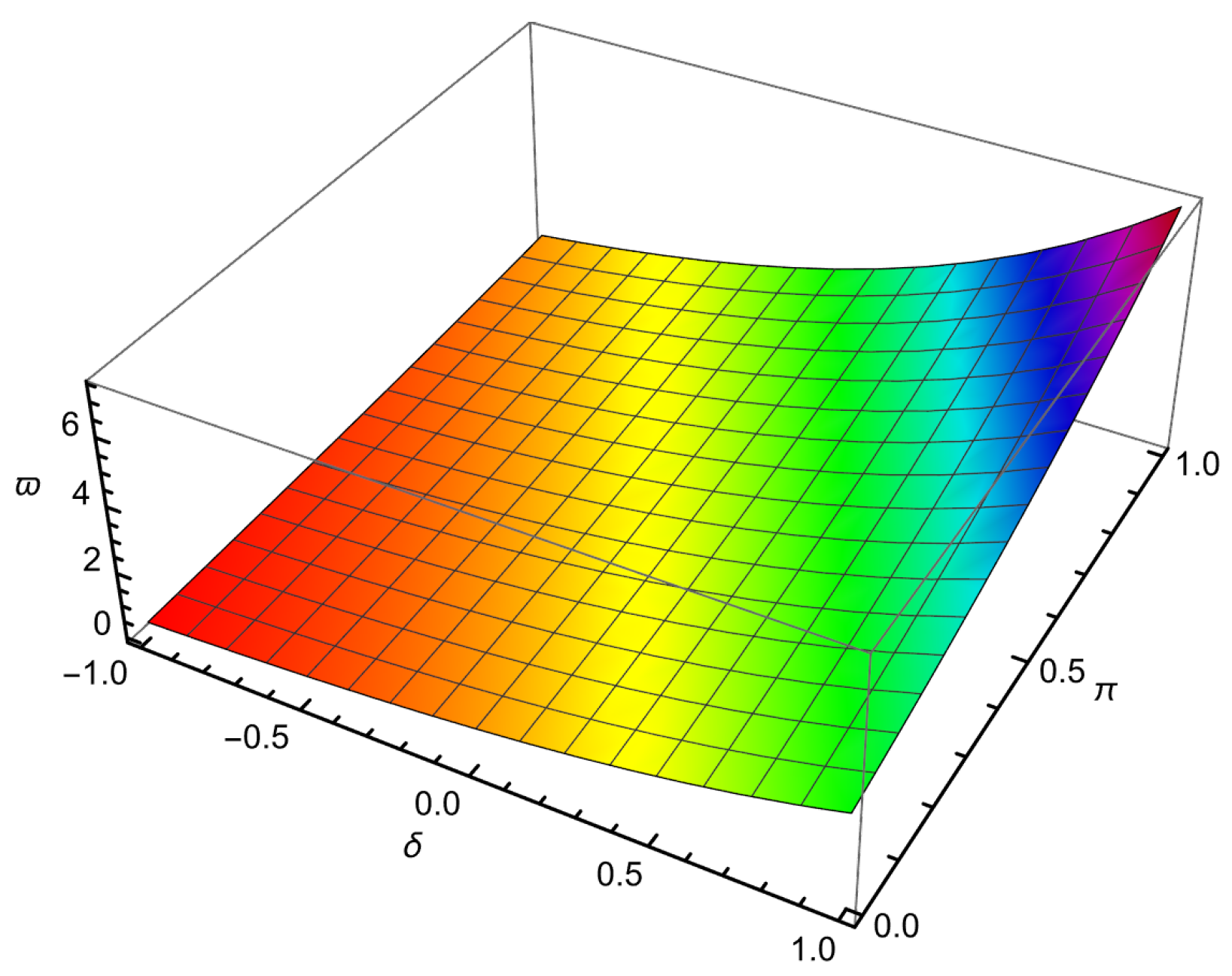
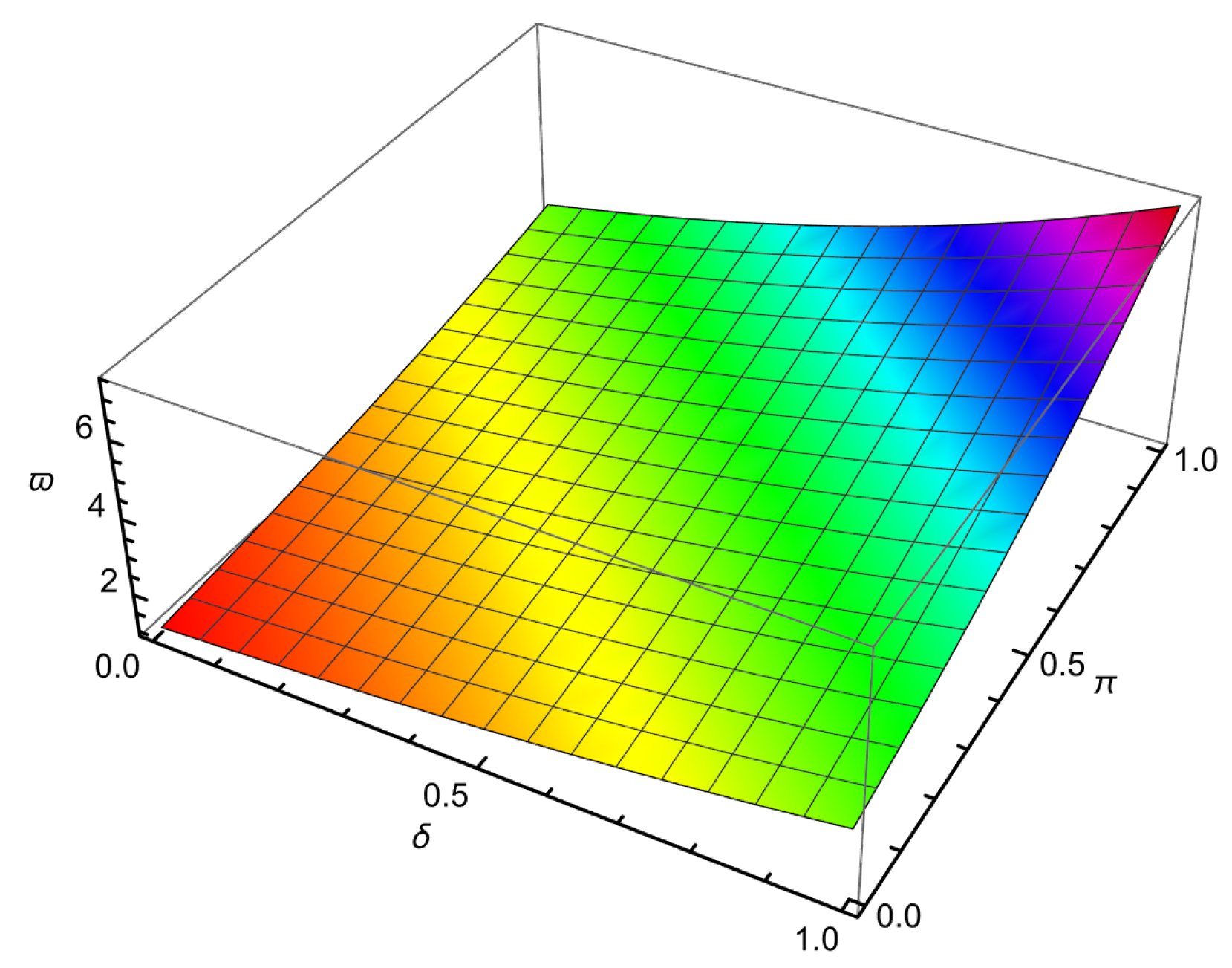
5. Results and Discussions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Caputo, M.; Fabrizio, M. Applications of New Time and Spatial Fractional Derivatives with Exponential Kernels. Prog. Fract. Differ. Appl. 2016, 2, 1–11. [Google Scholar] [CrossRef]
- Iqbal, N.; Yasmin, H.; Ali, A.; Bariq, A.; Al-Sawalha, M.M.; Mohammed, W.W.; Sousa, J.V.d.C. Numerical Methods for Fractional-Order Fornberg-Whitham Equations in the Sense of Atangana-Baleanu Derivative. J. Funct. Spaces 2021, 2021, 2197247. [Google Scholar] [CrossRef]
- Shah, N.A.; El-Zahar, E.R.; Chung, J.D.; Isik, M. Fractional Analysis of Coupled Burgers Equations within Yang Caputo-Fabrizio Operator. J. Funct. Spaces 2022, 2022, 6231921. [Google Scholar] [CrossRef]
- Naeem, M.; Zidan, A.M.; Nonlaopon, K.; Syam, M.I.; Al-Zhour, Z.; Shah, R. A New Analysis of Fractional-Order Equal-Width Equations via Novel Techniques. Symmetry 2021, 13, 886. [Google Scholar] [CrossRef]
- Sunthrayuth, P.; Zidan, A.M.; Yao, S.-W.; Shah, R.; Inc, M. The Comparative Study for Solving Fractional-Order Fornberg–Whitham Equation via ρ-Laplace Transform. Symmetry 2021, 13, 784. [Google Scholar] [CrossRef]
- Saad, K.M.; Atangana, A.; Baleanu, D. New fractional derivatives with non-singular kernel applied to the Burgers equation. Chaos: Interdiscip. J. Nonlinear Sci. 2018, 28, 063109. [Google Scholar] [CrossRef]
- Hamid, M.; Usman, M.; Haq, R.U.; Tian, Z. A spectral approach to analyze the nonlinear oscillatory fractional-order differential equations. Chaos Solitons Fractals 2021, 146, 110921. [Google Scholar] [CrossRef]
- Bokhari, A.; Baleanu, D.; Belgacem, R. Application of Shehu transform to Atangana-Baleanu derivatives. J. Math. Comput. Sci. 2019, 20, 101–107. [Google Scholar] [CrossRef]
- Nonlaopon, K.; Alsharif, A.M.; Zidan, A.M.; Khan, A.; Hamed, Y.S.; Shah, R. Numerical Investigation of Fractional-Order Swift–Hohenberg Equations via a Novel Transform. Symmetry 2021, 13, 1263. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Mofarreh, F.; Shah, R.; Luangboon, W.; Nonlaopon, K. An Analytical Technique, Based on Natural Transform to Solve Fractional-Order Parabolic Equations. Entropy 2021, 23, 1086. [Google Scholar] [CrossRef]
- Shah, N.A.; Dassios, I.; El-Zahar, E.R.; Chung, J.D. An Efficient Technique of Fractional-Order Physical Models Involving ρ-Laplace Transform. Mathematics 2022, 10, 816. [Google Scholar] [CrossRef]
- Aljahdaly, N.H.; Akgül, A.; Shah, R.; Mahariq, I.; Kafle, J. A comparative analysis of the fractional-order coupled Korteweg–De Vries equations with the Mittag–Leffler law. J. Math. 2022, 2022, 8876149. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Humaira, Y.; Iqbal, N.; Tanveer, A. Engineering applications of peristaltic fluid flow with hall current, thermal deposition and convective conditions. Mathematics 2020, 8, 1710. [Google Scholar] [CrossRef]
- Hamid, M.; Foong, O.M.; Usman, M.; Khan, I.; Wang, W. A New Operational Matrices-Based Spectral Method for Multi-Order Fractional Problems. Symmetry 2020, 12, 1471. [Google Scholar] [CrossRef]
- Sheikholeslami, M.; Hamid, M.; Haq, R.U.; Shafee, A. Numerical simulation of wavy porous enclosure filled with hybrid nanofluid involving Lorentz effect. Phys. Scr. 2020, 95, 115701. [Google Scholar] [CrossRef]
- Alesemi, M.; Iqbal, N.; Abdo, M.S. Novel Investigation of Fractional-Order Cauchy-Reaction Diffusion Equation Involving Caputo-Fabrizio Operator. J. Funct. Spaces 2022, 2022, 4284060. [Google Scholar] [CrossRef]
- Areshi, M.; Khan, A.; Shah, R.; Nonlaopon, K. Analytical investigation of fractional-order Newell-Whitehead-Segel equations via a novel transform. AIMS Math. 2022, 7, 6936–6958. [Google Scholar] [CrossRef]
- Yang, X.-J.; Baleanu, D. Fractal heat conduction problem solved by local fractional variation iteration method. Therm. Sci. 2013, 17, 625–628. [Google Scholar] [CrossRef]
- Dehghan, M.; Manafian, J.; Saadatmandi, A. Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numer. Methods Partial. Differ. Equ. 2009, 26, 448–479. [Google Scholar] [CrossRef]
- Acan, O.; Al Qurashi, M.M.; Baleanu, D. Reduced differential transform method for solving time and space local fractional partial differential equations. J. Nonlinear Sci. Appl. 2017, 10, 5230–5238. [Google Scholar] [CrossRef]
- Aljahdaly, N.H.; Agarwal, R.P.; Shah, R.; Botmart, T. Analysis of the Time Fractional-Order Coupled Burgers Equations with Non-Singular Kernel Operators. Mathematics 2021, 9, 2326. [Google Scholar] [CrossRef]
- Patra, A.; Ray, S.S. Homotopy perturbation sumudu transform method for solving convective radial fins with temperature-dependent thermal conductivity of fractional order energy balance equation. Int. J. Heat Mass Transf. 2014, 76, 162–170. [Google Scholar] [CrossRef]
- Momani, S.; Odibat, Z. Homotopy perturbation method for nonlinear partial differential equations of fractional order. Phys. Lett. A 2007, 365, 345–350. [Google Scholar] [CrossRef]
- Wazwaz, A.-M.; Gorguis, A. An analytic study of Fisher’s equation by using Adomian decomposition method. Appl. Math. Comput. 2004, 154, 609–620. [Google Scholar] [CrossRef]
- Warsi, Z.U.A. Conservation form of the Navier-Stokes equations in general nonsteady coordinates. AIAA J. 1981, 19, 240–242. [Google Scholar] [CrossRef]
- El-Shahed, M.; Salem, A. On the generalized Navier–Stokes equations. Appl. Math. Comput. 2004, 156, 287–293. [Google Scholar]
- Devendra, K.; Singh, J.; Kumar, S. A fractional model of Navier–Stokes equation arising in unsteady flow of a viscous fluid. J. Assoc. Arab. Univ. Basic Appl. Sci. 2015, 17, 14–19. [Google Scholar]
- Chu, Y.-M.; Shah, N.A.; Agarwal, P.; Chung, J.D. Analysis of fractional multi-dimensional Navier–Stokes equation. Adv. Differ. Equ. 2021, 2021, 91. [Google Scholar] [CrossRef]
- Ganji, Z.; Ganji, D.; Ganji, A.D.; Rostamian, M. Analytical solution of time-fractional Navier–Stokes equation in polar coordinate by homotopy perturbation method. Numer. Methods Partial. Differ. Equ. 2009, 26, 117–124. [Google Scholar] [CrossRef]
- Birajdar, G.A. Numerical Solution of Time Fractional Navier-Stokes Equation by Discrete Adomian decomposition method. Nonlinear Eng. 2013, 3, 21–26. [Google Scholar] [CrossRef]
- Shehu, M. Analytical solution of time-fractional Navier–Stokes equation by natural homotopy perturbation method. Prog. Fract. Differ. Appl. 2018, 4, 123–131. [Google Scholar]
- Kumar, S.; Kumar, D.; Abbasbandy, S.; Rashidi, M. Analytical solution of fractional Navier–Stokes equation by using modified Laplace decomposition method. Ain Shams Eng. J. 2014, 5, 569–574. [Google Scholar] [CrossRef]
- Jena, R.M.; Chakraverty, S. Solving time-fractional Navier–Stokes equations using homotopy perturbation Elzaki transform. SN Appl. Sci. 2019, 1, 16. [Google Scholar] [CrossRef]
- Ishak, H.; Abdulaziz, O.; Momani, S. Homotopy analysis method for fractional IVPs. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 674–684. [Google Scholar]
- El-Tawil, M.A.; Huseen, S.N. On convergence of q-homotopy analysis method. Int. J. Contemp. Math. Sci. 2013, 8, 481–497. [Google Scholar] [CrossRef]
- Amit, P.; Kaur, H. q-homotopy analysis transform method for space and time-fractional KdV-Burgers equation. Nonlinear Sci. Lett. A 2018, 9, 44–61. [Google Scholar]
- Akinyemi, L. q-Homotopy analysis method for solving the seventh-order time-fractional Lax’s Korteweg–de Vries and Sawada–Kotera equations. Comput. Appl. Math. 2019, 38, 191. [Google Scholar] [CrossRef]
- Ali, N.; Nawaz, R.; Zada, L.; Mouldi, A.; Bouzgarrou, S.M.; Sene, N.; Gul, T. Analytical Approximate Solution of the Fractional Order Biological Population Model by Using Natural Transform. J. Nanomater. 2022, 2022, 6703086. [Google Scholar] [CrossRef]
- Rehman, S.U.; Nawaz, R.; Zia, F.; Fewster-Young, N.; Ali, A.H. A comparative analysis of Noyes-Field model for the non-linear Belousov–Zhabotinsky reaction using two reliable techniques. Alex. Eng. J. 2024, 93, 259–279. [Google Scholar] [CrossRef]
- Sachin, B.; Daftardar-Gejji, V. Convergence of the new iterative method. Int. J. Differ. Equ. 2011, 2011, 989065. [Google Scholar]
- Zada, L.; Nawaz, R.; Alqudah, M.A.; Nisar, K.S. A new technique for approximate solution of fractional-order partial differential equations. Fractals 2021, 30, 2240015. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.01 | 0.001 | −0.109997 | −0.110146 | −0.109778 | 2.18662 × | 3.67275 × |
| 0.035 | 0.001 | −0.134858 | −0.135044 | −0.13459 | 2.67256 × | 4.5386 × |
| 0.06 | 0.001 | −0.159633 | −0.159869 | −0.159318 | 3.15181 × | 5.50792 × |
| 0.085 | 0.001 | −0.184309 | −0.18461 | −0.183947 | 3.62315 × | 6.63065 × |
| 0.01 | 0.003 | −0.110437 | −0.11088 | −0.109778 | 6.58592 × | 1.10183 × |
| 0.035 | 0.003 | −0.135395 | −0.135952 | −0.13459 | 8.04935 × | 1.36158 × |
| 0.06 | 0.003 | −0.160267 | −0.160971 | −0.159318 | 9.49249 × | 1.65238 × |
| 0.085 | 0.003 | −0.185038 | −0.185936 | −0.183947 | 1.09117 × | 1.9892 × |
| 0.01 | 0.005 | −0.11088 | −0.111615 | −0.109778 | 1.10203 × | 1.83638 × |
| 0.035 | 0.005 | −0.135937 | −0.13686 | −0.13459 | 1.34688 × | 2.2693 × |
| 0.06 | 0.005 | −0.160907 | −0.162072 | −0.159318 | 1.58831 × | 2.75396 × |
| 0.085 | 0.005 | −0.185772 | −0.187262 | −0.183947 | 1.8257 × | 3.31533 × |
| 0.01 | 0.001 | 0.109778 | 0.109893 | 0.109778 | 1.08562 × | 1.14202 × |
| 0.035 | 0.001 | 0.13459 | 0.13473 | 0.13459 | 1.32282 × | 1.3979 × |
| 0.06 | 0.001 | 0.159318 | 0.159483 | 0.159318 | 1.55425 × | 1.65209 × |
| 0.085 | 0.001 | 0.183947 | 0.184137 | 0.183947 | 1.77893 × | 1.90444 × |
| 0.01 | 0.003 | 0.109779 | 0.110121 | 0.109778 | 9.78995 × | 3.42605 × |
| 0.035 | 0.003 | 0.134592 | 0.13501 | 0.13459 | 1.19287 × | 4.19369 × |
| 0.06 | 0.003 | 0.15932 | 0.159814 | 0.159318 | 1.40155 × | 4.95626 × |
| 0.085 | 0.003 | 0.183948 | 0.184518 | 0.183947 | 1.60412 × | 5.71332 × |
| 0.01 | 0.005 | 0.109781 | 0.110349 | 0.109778 | 2.72483 × | 5.71008 × |
| 0.035 | 0.005 | 0.134594 | 0.135289 | 0.13459 | 3.32007 × | 6.98948 × |
| 0.06 | 0.005 | 0.159322 | 0.160144 | 0.159318 | 3.90079 × | 8.26043 × |
| 0.085 | 0.005 | 0.183951 | 0.184899 | 0.183947 | 4.46451 × | 9.52219 × |
| 0.01 | 0.001 | −1.11878 | −1.11582 | −1.11628 | 2.50051 × | 4.59333 × |
| 0.035 | 0.001 | −1.14717 | −1.14407 | −1.14454 | 2.62893 × | 4.71136 × |
| 0.06 | 0.001 | −1.17627 | −1.17303 | −1.17351 | 2.76396 × | 4.83245 × |
| 0.085 | 0.001 | −1.20612 | −1.20272 | −1.20322 | 2.90593 × | 4.95671 × |
| 0.01 | 0.003 | −1.12383 | −1.1149 | −1.11628 | 7.5518 × | 1.378 × |
| 0.035 | 0.003 | −1.15248 | −1.14312 | −1.14454 | 7.941 × | 1.41341 × |
| 0.06 | 0.003 | −1.18186 | −1.17206 | −1.17351 | 8.35031 × | 1.44974 × |
| 0.085 | 0.003 | −1.212 | −1.20173 | −1.20322 | 8.78077 × | 1.48701 × |
| 0.01 | 0.005 | −1.12895 | −1.11398 | −1.11628 | 1.26704 × | 2.29667 × |
| 0.035 | 0.005 | −1.15786 | −1.14218 | −1.14454 | 1.33257 × | 2.35568 × |
| 0.06 | 0.005 | −1.18753 | −1.17109 | −1.17351 | 1.4015 × | 2.41623 × |
| 0.085 | 0.005 | −1.21796 | −1.20074 | −1.20322 | 1.474 × | 2.47835 × |
| 0.01 | 0.001 | 1.11628 | 1.11623 | 1.11628 | 1.39356 × | 4.34366 × |
| 0.035 | 0.001 | 1.14454 | 1.14449 | 1.14454 | 1.50217 × | 4.45306 × |
| 0.06 | 0.001 | 1.17351 | 1.17347 | 1.17351 | 1.61924 × | 4.56521 × |
| 0.085 | 0.001 | 1.20322 | 1.20317 | 1.20322 | 1.74544 × | 4.68017 × |
| 0.01 | 0.003 | 1.11629 | 1.11615 | 1.11628 | 1.2589 × | 1.3031 × |
| 0.035 | 0.003 | 1.14455 | 1.1444 | 1.14454 | 1.35714 × | 1.33592 × |
| 0.06 | 0.003 | 1.17353 | 1.17337 | 1.17351 | 1.46305 × | 1.36956 × |
| 0.085 | 0.003 | 1.20323 | 1.20308 | 1.20322 | 1.57724 × | 1.40405 × |
| 0.01 | 0.005 | 1.11631 | 1.11606 | 1.11628 | 3.51008 × | 2.17183 × |
| 0.035 | 0.005 | 1.14457 | 1.14431 | 1.14454 | 3.78436 × | 2.22653 × |
| 0.06 | 0.005 | 1.17355 | 1.17328 | 1.17351 | 4.08009 × | 2.28261 × |
| 0.085 | 0.005 | 1.20326 | 1.20298 | 1.20322 | 4.39897 × | 2.34008 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rehman, S.U.; Nawaz, R.; Zia, F.; Fewster-Young, N. A Comprehensive Study on the Applications of NTIM and OAFM in Analyzing Fractional Navier–Stokes Equations. Axioms 2025, 14, 521. https://doi.org/10.3390/axioms14070521
Rehman SU, Nawaz R, Zia F, Fewster-Young N. A Comprehensive Study on the Applications of NTIM and OAFM in Analyzing Fractional Navier–Stokes Equations. Axioms. 2025; 14(7):521. https://doi.org/10.3390/axioms14070521
Chicago/Turabian StyleRehman, Siddiq Ur, Rashid Nawaz, Faisal Zia, and Nick Fewster-Young. 2025. "A Comprehensive Study on the Applications of NTIM and OAFM in Analyzing Fractional Navier–Stokes Equations" Axioms 14, no. 7: 521. https://doi.org/10.3390/axioms14070521
APA StyleRehman, S. U., Nawaz, R., Zia, F., & Fewster-Young, N. (2025). A Comprehensive Study on the Applications of NTIM and OAFM in Analyzing Fractional Navier–Stokes Equations. Axioms, 14(7), 521. https://doi.org/10.3390/axioms14070521