1. Introduction
One of the foundational results in fixed point theory is the Banach contraction principle [
1], which guarantees the existence and uniqueness of fixed points for self-contractive mappings on complete metric spaces. Since its introduction in 1922, this principle has inspired extensive research, with many generalizations aimed at relaxing the original assumptions and broadening its applicability. One major direction of development has involved generalizing the underlying space. Notably,
b-metric spaces, introduced by Bakhtin [
2] and refined by Czerwik [
3], extend the classical metric structure. This was followed by extended
b-metric spaces [
4], controlled metric-type spaces [
5], controlled
b-Branciari metric-type spaces [
6], and double controlled metric-type spaces [
7,
8]. To address increasingly complex systems, recent work has introduced triple controlled metric-type spaces [
9,
10,
11], which employ three control functions to govern the generalized distance. These spaces enable the treatment of nonlinear problems with multiple interdependent constraints, opening new directions for both theory and application. Fixed point theory in such generalized frameworks has found applications across various fields. In ecology, it aids in analyzing equilibrium states in population dynamics and ecosystem models [
12]. In computer science, it provides theoretical underpinnings for program semantics, static analysis, and iterative algorithms [
13]. In economics, it supports core results in game theory and general equilibrium models [
14]. The flexibility of controlled metric spaces makes them particularly valuable in these domains, where classical metric assumptions are often too restrictive.
Fixed point theory on generalized metric-type spaces has seen notable progress with the introduction of several contraction conditions. Among these, Wardowski’s
-contraction [
15] and Samet et al.’s
-admissible mappings [
16] have proven instrumental in relaxing classical assumptions. Recent works (such as [
11,
17]) have extended these ideas to
-contractions on various metric frameworks.
To control the iterative behavior in more complex settings, we incorporate a control pair
from the upper class of type I, as introduced by Ansari et al. [
18,
19]. The use of
allows for a finer regulation of the contraction dynamics, particularly in triple controlled metric-type spaces. This combination facilitates the establishment of fixed point results under broader and more flexible conditions, with potential applications in nonlinear analysis and applied mathematics.
In this work, we introduce a novel contraction mapping, denoted by ()-contractions, within the framework of triple controlled metric-type spaces. These mappings incorporate the following:
-admissible and -subadmissible control functions.
a control pair from the upper class of type I.
a function-based contraction condition of Wardowski type via -functions.
We establish both the existence and uniqueness of fixed points for these mappings and derive several corollaries as special cases of our main result. In addition, we present an example of our main result.
To demonstrate the applicability of the proposed theory, we analyze a nonlinear equation involving powers of the
function,
by first establishing the existence and uniqueness of a real root of an
mth-degree polynomial in
x. Then, as an application, we apply it to the
function, thereby illustrating how our framework effectively handles analytical problems involving nonlinear trigonometric expressions.
2. Preliminaries
In 2000, Branciari [
20] introduced the notion of rectangular metric spaces, also known as generalized metric spaces.
Definition 1. The mapping , with , is defined as follows:
- 1.
, for all ;
- 2.
the symmetry property for all ;
- 3.
The pair is called a rectangular metric space.
Rectangular metric spaces have attracted considerable interest, as their topological structure is generally incompatible with that of ordinary metric spaces. This fundamental distinction has motivated numerous authors to further explore and develop the theory of such spaces [
21]. The concept was subsequently extended to rectangular
b-metric spaces [
22,
23]. More recently, in 2020, the controlled
b-Branciari metric-type space was introduced [
6], providing an even more flexible framework.
Definition 2. Let , and consider a real number . The mapping is defined as follows:
- 1.
, for all ;
- 2.
the symmetry property for all ;
- 3.
for all and all distinct points , each different from . The structure is called a rectangular b-metric space.
Definition 3. Let and consider . A function is referred to as a controlled b-Branciari type metric if it fulfills the following conditions:
- 1.
, for all ;
- 2.
symmetry condition for all ;
- 3.
For every pair that belongs to , and for all distinct elements , each different from . The structure is termed a controlled b-Branciari metric-type space.
The triple controlled metric-type space was introduced as an extension to the controlled
b-Branciari metric-type space. For more information, consult [
9,
10,
11].
Definition 4. ([
9]).
Consider , let be functions. A mapping is termed as a triple controlled metric type if it satisfies the following:- (q1)
if and only if for every ;
- (q2)
for every ;
- (q3)
.
For every and for every distinct elements each different from and . The structure is termed a triple controlled metric-type space (it is abbreviated as ).
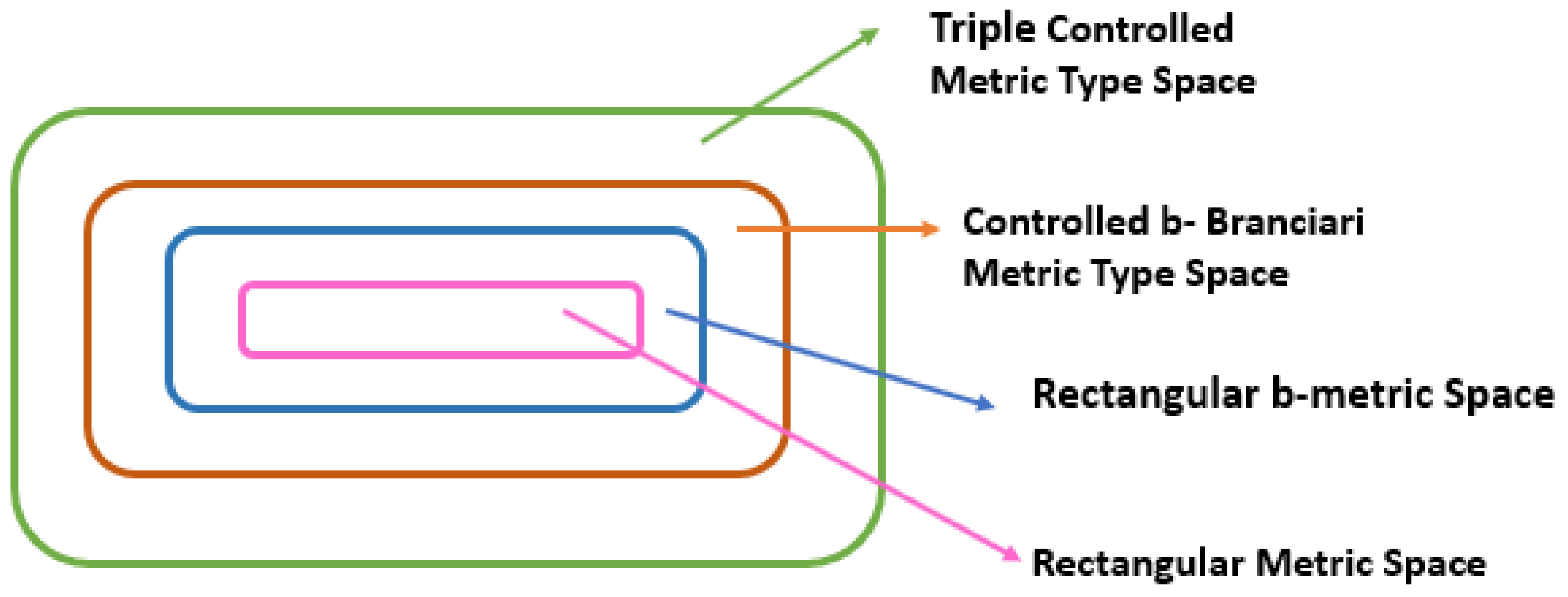
Remark 1. The relationship between these various rectangular metric-type spaces can be observed as follows: by taking , one can see that every rectangular metric space is a rectangular b-metric-type space. Also, by taking the function , we observe that every rectangular b-metric space is a controlled b-Branciari metric-type space. Moreover, by taking , we conclude that every controlled b-Branciari metric-type space is a triple controlled metric-type space. The converse does not hold in any of these cases. Figure 1 below illustrates the relationship between various metric spaces. The triple controlled metric-type space,
, is a generalization of controlled
b-Branciari metric-type space, as illustrated in the example below (c.f. [
9]).
Example 1. Let , where and is the set of all positive integers. Define the mapping by The control functions are defined asand One can easily show that ϖ is a . Note Thus, the is not a controlled b-Branciari metric-type space.
The notions of convergence, Cauchy sequences, completeness, and open balls within the framework of are presented in the following discussion.
Definition 5. Consider the structure , and assume is any sequence in the space .
- (1)
The operator is termed to be continuous at point if for every , there exists so that .
- (2)
The open ball is described asfor some and . - (3)
A sequence in is termed to converge to some in if for every , you can find some so that for every In this case, we write
- (4)
The sequence is said to be a Cauchy sequence, if for every , there exists some such that for every
- (5)
The space is said to be a complete space if every Cauchy sequence in is convergent.
Remark 2. In light of the disparities between the rectangular b-metric space topology and the conventional metric space topology, an illustrative example, initially constructed in [24] and further discussed in subsequent studies [23,25], demonstrates a fundamental distinction. Unlike traditional metric spaces, where each convergent sequence has a unique limit, in b-metric spaces, sequences may converge to multiple limits. This property highlights a significant deviation from the standard sequence convergence’s behavior within metric spaces. Example 2. Let , and consider the set . The mapping is defined as Consider , and , then one can see that is a rectangular b-metric space. Note that the sequence converges to two elements 0 and 2. For more illustrations, refer to [23,24]. The next lemma, adapted from [
26] and further explored in [
23,
25], illustrates the condition that guarantees the unique convergence of a sequence in
b-metric spaces.
Lemma 1. Let be a Cauchy sequence in a rectangular b-metric space with the property that for all . Under these conditions, the sequence admits at most one limit point.
Definition 6 ([
18,
19])
. A map belongs to the subclass of type I if it fulfills the following condition: for all whenever , it holds that Example 3 ([
18,
19])
. Each function h is of a subclass of type I:- (1)
let with .
- (2)
let , with .
- (3)
let such that .
Definition 7 ([
18,
19])
. The pair is called an upper class of type I, if h is of a subclass of type I, and is a function fulfilling the following conditions:- 1.
implies
- 2.
implies
Example 4 ([
18,
19])
. Examples of the pair :- (1)
Let with and,
- (2)
Let and .
- (3)
Let and and .
- (4)
Let with and .
The notion of
-admissible mappings was proposed by Samet et al. [
16], while the notion
-subadmissible mapping can be found in [
27].
Definition 8. Consider the mapping and let be functions. Then,
- (1)
T is referred to as -admissible mapping, if for all , we have - (2)
T is referred to as η-subadmissible mapping, if for all , we have
Example 5. Consider , and let and be defined as , and for all , Then, T is termed as -admissible mapping
Example 6. Let , the mapping is defined as; Let be defined byand Then, T is α-admissible and η-subadmissible mapping, since if means , consequently, Moreover, T is η-subadmissible, since if , means , hence .
Wardowski [
15] introduced the
-contraction, later extended to various generalized metric spaces [
28,
29].
Definition 9. Define as the collection of all functions that meet the following conditions:
- (L1)
L is a strictly increasing.
- (L2)
For any sequence of positive real numbers, the equivalence;holds true. - (L3)
There exists a constant .
Example 7. Let , and , for . It is evident that both F(t) and G(t) fulfill the conditions , and . Therefore, they are member of the class . For additional information, refer to [15]. Definition 10. Let be a . A self-mapping is said to be -contraction if there exists a function and a constant such that the following implication holds: Next, we present our novel —contraction mapping on a .
Definition 11. Let be a , where . A mapping is considered to be an —contraction, if the following inequality is satisfied:for every , such that , and . The pair is an upper class of type I, here α and η as in Definition 8. Example 8. Let be a , and let the mapping be an -contraction mapping. By taking and where and , and , thus Equation (2) simplifies to 3. Main Results
The primary fixed-point result based on our novel -contraction mapping (defined on , ) framework is presented below.
Theorem 1. Let be a complete , and let be an -contraction mapping, as in Definition 11, satisfying the following conditions:
- (T1)
T is both α-admissible and η-subadmissible.
- (T2)
Some can be found, so that and .
- (T3)
For , we define the sequence by , for . Assume the following conditions hold:and Furthermore, for each , the following limits exists and are finite;
Then T admits a fixed point in . Moreover, if T has two fixed points satisfying and , then T possess a unique fixed point in
Proof. We start by selecting
as in condition (T2), hence
, and
. The general term of the sequence
is defined by setting
. For any
, we have
By utilizing the pair
:
After continuing the process a few times,
Taking the limit
in (
7), and utilizing
,
As
, by (L2), it implies that
. By condition (L3), we can find some
such that
Letting
n tends to infinity in Equation (
10), we obtain
Therefore,
; thus, there is some
so that
Step A: Establishing the convergence of the sequence .
We start by showing is Cauchy sequence in two steps; thus, for all, :
Step 1. Assume that
is an odd integer, where
. By applying triangular inequality in the context of the
, we derive:
The last inequality can be written as
By substituting Equation (
12) into the preceding inequality, we conclude that
which leads to
We express it as
where
and
Applying the ratio test in conjunction with Equation (
4), we find that
Likewise, employing Equation (
5) and again using the ratio test, we obtain
Furthermore, from Equation (
6) and the fact
, it follows that
Step 2: Let
be an even integer, with
. Repeat the same process as in Step 1. Hence, we obtain;
Consequently, the sequence
is Cauchy in the complete
, so it converges to a point
, that is,
Step B: We show , i.e., is a fixed point.
Since
belongs to the upper class of type I, it follows that
Taking the limit as
n tends to infinity in (
17), and using Equation
16 and (L2) from Definition 9, we obtain
, which implies
Observe
By passing to the limit as
in Equation (
18) and invoking Equation (
6), we arrive at the conclusion that
.
Step C: We establish the uniqueness of the fixed point. Suppose there exist two distinct fixed points,
, and
, such that
and
. Consider
This yields which contradicts the assumption that . Therefore, we must have , confirming that the fixed point is unique.
□
Remark 3. Let be a complete , by taking , then becomes controlled b-Branciari metric type as in Definition 3. Thus, we obtain a special case of our primary Theorem 1.
Corollary 1. Let be a complete controlled b-Branciari metric type, and let be an —contraction mapping satisfying the following conditions:
- (T1)
T is both α-admissible and η-subadmissible.
- (T2)
There is some such that and .
- (T3)
For , we define the sequence by , for . Assume the following conditions hold:Furthermore, for each , the following limits exists and are finite:
Then T admits a fixed point in . Moreover, if T has two fixed points satisfying and , then T possess a unique fixed point in
Next, we state a corollary to our primary theorem.
Corollary 2. Let be a complete , and let be an α-admissible and η-subadmissible -contraction mapping satisfying the following:where . Moreover, the following conditions hold: - 1.
There is some such that and .
- 2.
For , we define the sequence by , for , such that the following conditions hold:andFurthermore, for each , the following limits exists and are finite:
Then, T admits a fixed point in . Moreover, if T has two fixed points satisfying and , then T admits a unique fixed point in
Proof. Choosing
and
where
and
in Definition 11. Therefore, in the statement of Theorem 1, the Equation (
2) becomes
□
Next, we present a supporting example for Corollary 2, inspired by [
30].
Example 9. Let , and consider the mapping defined by . The control functions are defined by , , and Then, is a complete . The pair of upper class of type I will be taken as and also while the mapping is defined as Let be defined as in Example 6. Thus, T is α-admissible and η-subadmissible.
To show T is -contraction mapping, we only need to look at the case when . Note By taking , in (24), we have Therefore, we havewhich implies that T is -contraction mapping. Let , then . We form a sequence by ; hence, for all . Finally, to show Equations (21) and (22) holds, observeand Moreover, for any , all the limits , , and exists and are finite. Therefore, T fulfills all the hypotheses of Corollary 2. Consequently, T has a fixed point, which is .
4. Application
In summary, Theorem 1 provides a rigorous framework for establishing the existence and uniqueness of a real root of an mth-degree polynomial. While various methods have been developed to address root-finding problems—most notably numerical algorithms—the fixed point approach employed herein offers an elegant and analytically tractable alternative. As a particular application, we further demonstrate the existence of a unique real root for an mth-degree polynomial formulated in terms of .
Theorem 2. For any natural number, the below equationadmits a unique solution within the interval Proof. If
, then Equation (
25) have no solution; thus,
. Let
. For any
, define the function
by
. Consider the three mappings
specified as follows:
It can be verified that constitute a complete triple controlled metric-type space .
Choose the pair
by
and
. Additionally, define the function
The operator
, is defined by
Given that
, we choose
for computational convenience. However, the same approach can be applied to verify the result for any
. Accordingly, Equation (
26) transforms into:
Let
be defined by
One can easily show that T is -admissible and -subadmissible mapping, since if , it means , so . Consequently, . Similarly, one can show that if , then
To show
T is
-contraction mapping, note that for
, we have
By taking
, in (
28), we have
Therefore, we have
which implies that
T is
-contraction mapping.
Finally, we show that Equations (
4) and (
5) of Theorem 1 holds. Let
such that
, and
, so
Form the sequence
. We study the behavior of
as
n tends to infinity.
The sequence
is decreasing as
n tends to infinity. Since,
, and
Thus, for general
n, we have
One can show that the sequence
is a decreasing sequence. Furthermore, for each
. Let
Hence, one can easily see that
Also, in the same way, one can show that
Moreover, the limit
exists and is finite, also both
and
are well defined and finite. Hence, all the requirements of Theorem 1 are satisfied. It follows that the operator
T admits a unique fixed point in
which corresponds to the unique real solution of Equation (
32). □
Next, we present an application of our Theorem 2 to the trignometric function .
Theorem 3. For any natural number, the following equationadmits a unique solution within the interval Proof. Note, for , we then have . Denote , and let . Apply Theorem 2. □
5. Conclusions
In this study, we introduced a novel class of contractive mappings, denoted as ()-contractions, within the framework of triple controlled metric-type spaces. By incorporating -admissibility,-subadmissibility, and a control pair from the upper class of type I, alongside Wardowski-type -contractions, we established comprehensive fixed point theorems ensuring both existence and uniqueness. These results not only generalize but also unify several prior contributions in the field of controlled and functional fixed point theory.
The practical efficacy of the proposed framework was demonstrated through the solvability analysis of a nonlinear equation involving powers of the sine function, where a unique solution was established within a bounded domain.
This work paves the way for several potential research directions. Can the present framework be extended to encompass multi-valued mappings or coupled fixed point configurations? Are analogous results attainable in fuzzy or probabilistic metric settings, or within partial metric structures? Moreover, exploring applications in domains such as ecology and economics, where controlled nonlinear dynamics frequently arise, remains an open and intriguing question.



{kind=link}