
Polar Code BP Decoding Optimization for Green 6G Satellite Communication: A Geometry Perspective

Abstract
1. Introduction
- The first approach involves designing a verification condition to judge the result of each iteration. If the condition is met, the iteration stops, and the current decoding result is output. For instance, the early termination criterion based on the G-matrix proposed in Ref. [4] determines whether to terminate early by comparing the estimated messages and codewords at the end of each BP decoding iteration. Ref. [5] improves upon the method in [4] by proposing the Bit Difference Ratio (BDR) criterion, which focuses on the number of differing bits between the estimated codeword and the codeword calculated based on the estimated messages. Ref. [6] introduces an early termination criterion based on the H-matrix, which has lower complexity compared to the G-matrix criterion in [4]. Ref. [7] incorporates Cyclic Redundancy Check (CRC) to more accurately perceive convergence properties. This approach draws inspiration from early termination algorithms for LDPC codes and belongs to the general idea of linear block code decoding. Its advantage lies in its simplicity and directness, while the disadvantage is that it does not incorporate the characteristics of polar codes.
- The second approach analyzes each information bit or frozen bit based on the characteristics of polarized channels and designs early termination algorithms according to their reliability. Ref. [8] points out that observing a group of information bits, known as the Worst of Information Bits (WIBs), can detect successful decoding. WIBs are bits transmitted through channels with higher error probabilities and thus require more decoding iterations for successful decoding compared to other bits. Additionally, Ref. [9] proposes an early termination criterion based on the bit error rate (BER) for frozen bits of polar codes. In Ref. [10], researchers suggest using optimal frozen bits to terminate decoding, as these partially frozen bits have lower average error probabilities. The advantage of this approach is that it leverages channel polarization theory and combines the characteristics of polar codes, while the disadvantage is that it does not incorporate the transmission of soft information for information nodes and does not utilize the advantages of BP decoding.
- The third approach leverages the SISO characteristics of polar code BP decoding to design early termination algorithms based on the Log-Likelihood Ratio (LLR). Since the BP decoding algorithm outputs soft information, the LLR of each information node represents the reliability of the information. Designing early termination algorithms by calculating the LLR exploits the advantages of polar code BP decoding algorithms. Ref. [4] proposes the min Log-Likelihood Ratio (minLLR) criterion, which was later simplified in subsequent research [11] with the decision condition that all LLR values are greater than a set threshold indicating successful decoding. Furthermore, in Ref. [7], an LLR magnitude-aided (LMA) early termination scheme based on the convergence properties of LLR messages is proposed, which terminates iterations early when the LLR of an information node remains unchanged for two consecutive times. Ref. [12] introduces a partial LLR-aided (PLA) early termination scheme, which terminates iterations early when the difference in LLR values of an information node over two consecutive times is less than a threshold. This approach fully exploits the characteristics of soft information transmission in polar code BP decoding, but existing algorithms directly use Euclidean distance to calculate LLR differences, lacking a mathematical analysis of LLR.
- To mathematically analyze the changes in LLR values during the BP decoding process of polar codes, this paper utilizes mathematical tools—information geometry and modern differential geometry—to analyze the BP decoding algorithms of polar codes, establish a geometric framework for polar code BP decoding algorithms, and propose a theoretical explanation for polar code BP decoding algorithms. It maps information nodes to statistical manifolds, equates the probability information contained in nodes to points on manifolds, and represents the iterative process as finding convergence points on manifolds, providing an intuitive representation of the iterative process of polar code BP decoding algorithms. Under this framework, information geometry and modern differential geometry can be utilized to improve polar code BP decoding algorithms, providing new insights for research on polar code BP decoding algorithms.
- Addressing the issue of high iteration counts in BP decoding algorithms, this paper studies early termination algorithms for polar code BP decoding within the geometric framework. By calculating metrics, distance, and divergence in statistical manifolds, it optimizes existing algorithms and proposes early termination algorithms for polar code BP decoding based on Riemannian distance and divergence. These algorithms improve the convergence speed of polar code BP decoding without affecting the BER.
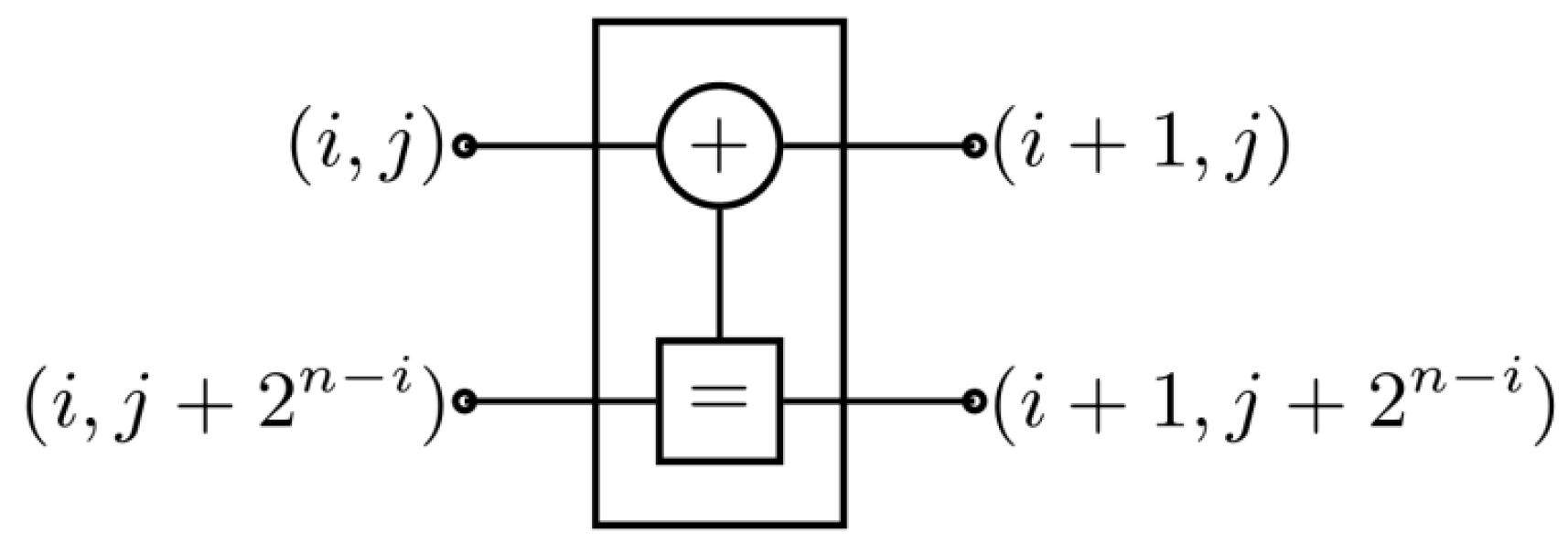
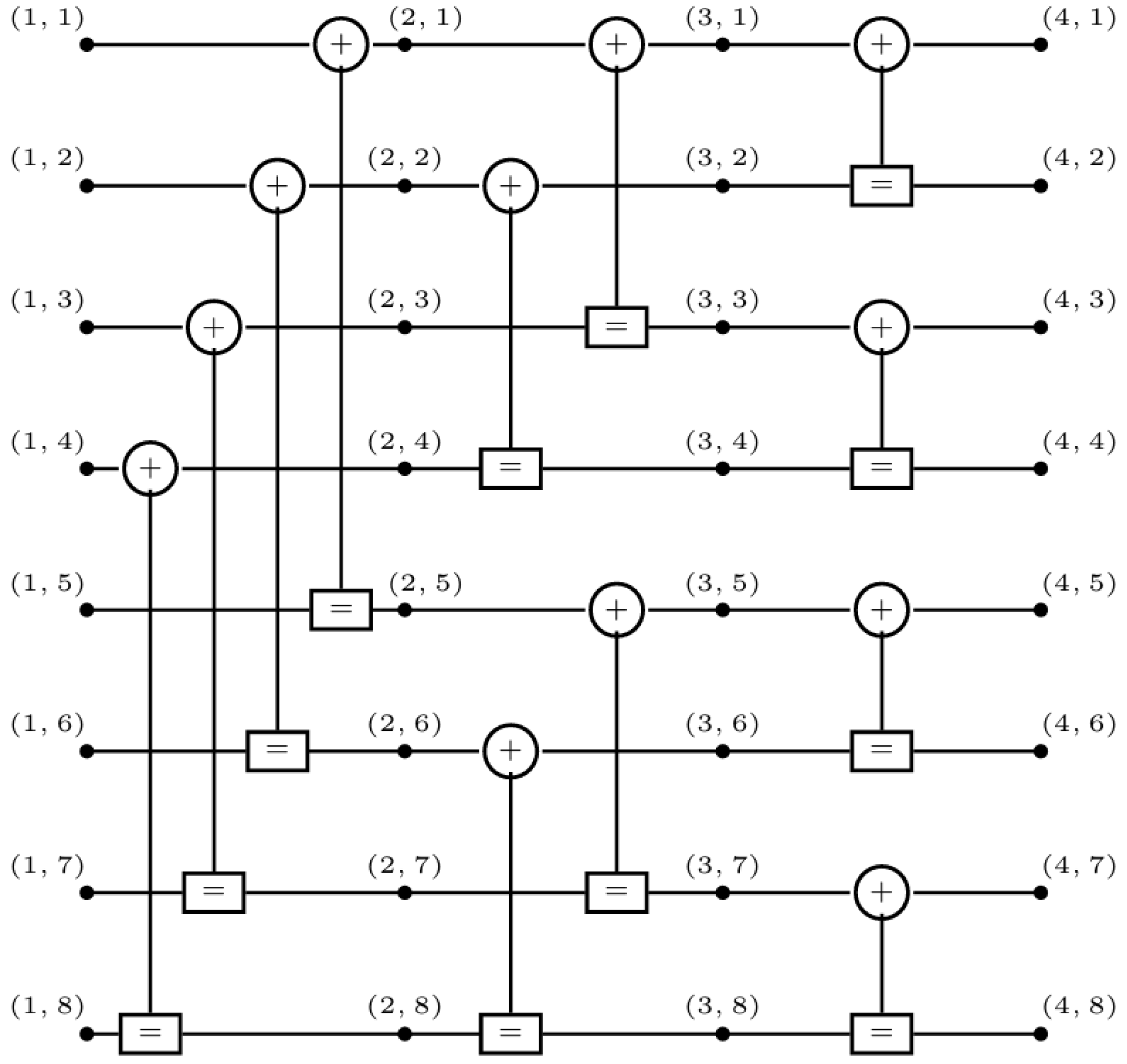
2. BP Decoding Algorithm for Polar Codes
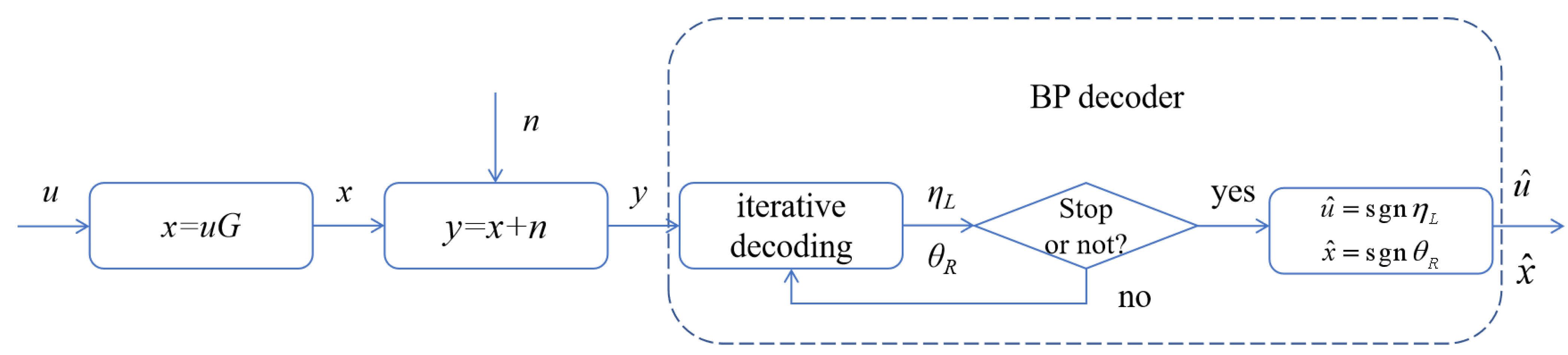
- When Erdal Arıkan introduced the BP decoding for polar codes, he did not specify a concrete stopping criterion. In practical applications, a maximum number of iterations is often set or one of the three approaches mentioned in the introduction is adopted to prematurely terminate the iterations.
- In the literature and practical applications, attention is often solely focused on , while is overlooked. Ref. [4] points out that when the iterations are stopped, .
| Algorithm 1 Polar Code BP Decoding |
|
3. Information Geometry of BP Polar Decoding
3.1. Geometric Representation of Soft Information
- Intuitiveness: The geometric representation dynamically demonstrates the process of polar code BP decoding, providing a clear perspective for a deep understanding of the nature of decoding.
- Flexibility: The construction of the manifold can be flexibly adjusted according to research objectives. For example, when studying a particular information node, a two-dimensional manifold can be constructed through the Cartesian product, with left information and right information corresponding to different manifold coordinates, respectively. When studying the left information of N nodes, an N-dimensional manifold can be constructed, with each coordinate component representing the left information of one node.
- Practicality: Analyzing and optimizing characteristics such as metrics, curvature, and divergence on the manifold with geometric tools can effectively improve the convergence performance of decoding algorithms, providing powerful tool support for subsequent performance optimization.
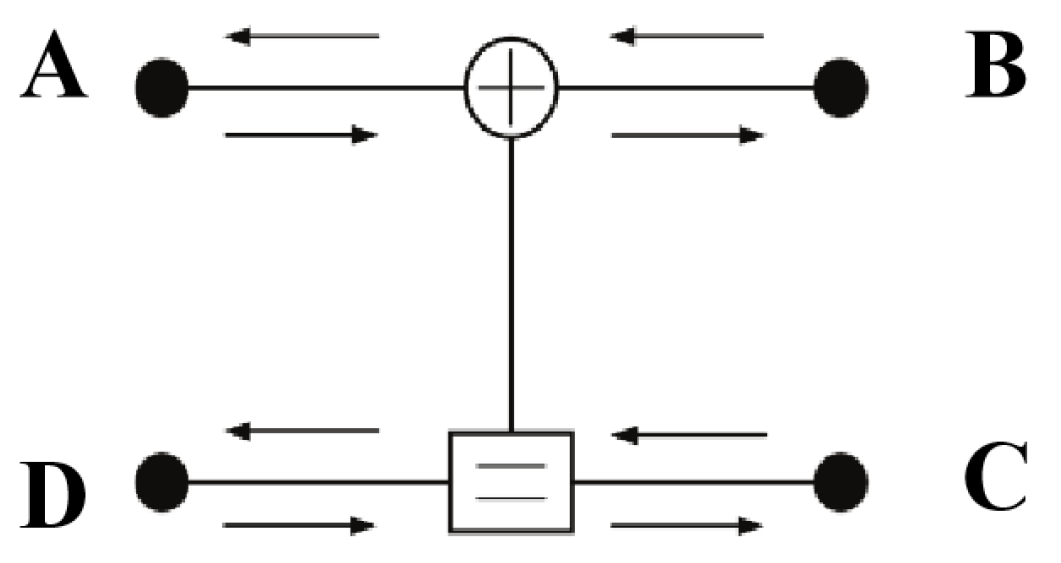
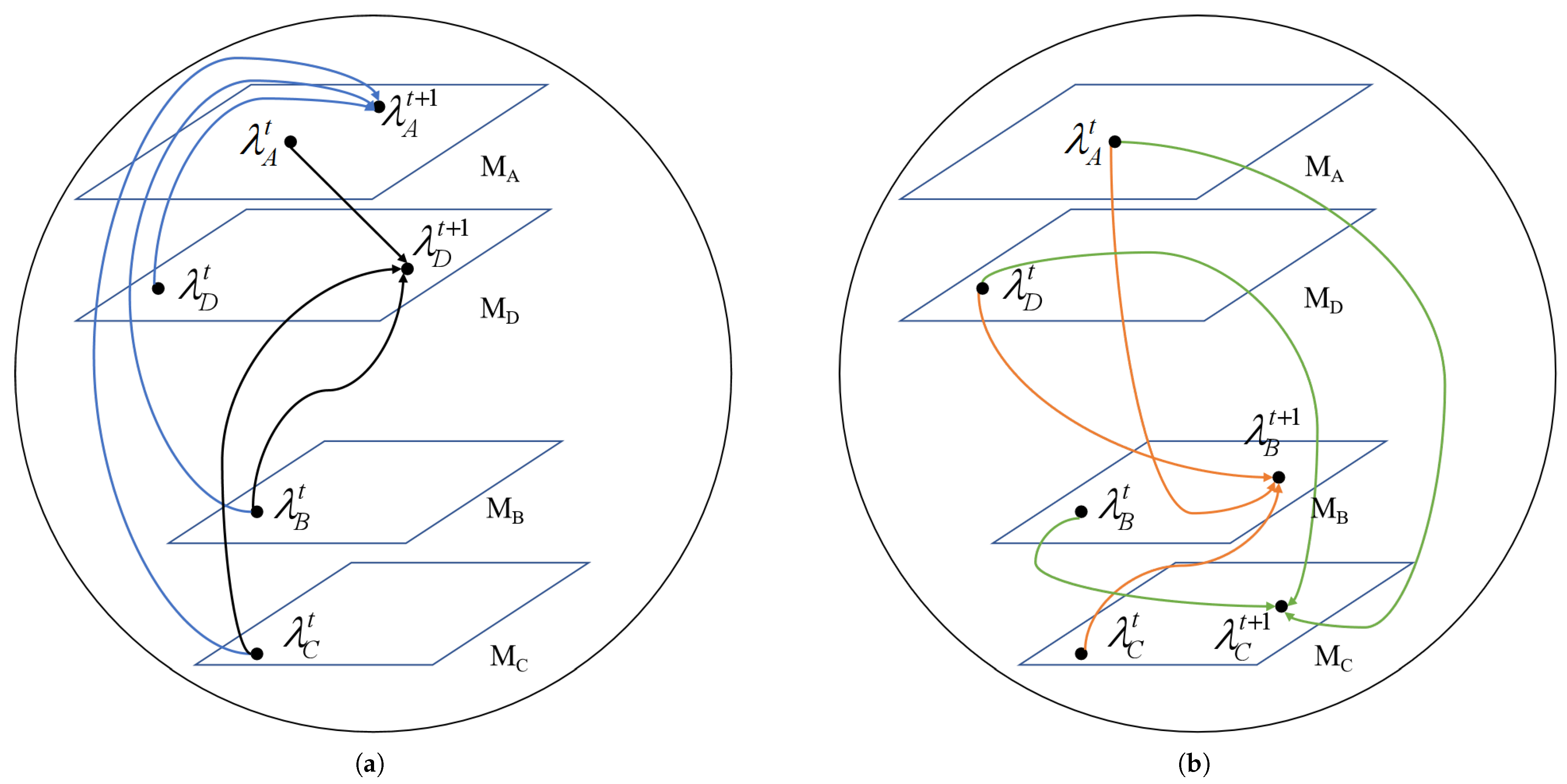
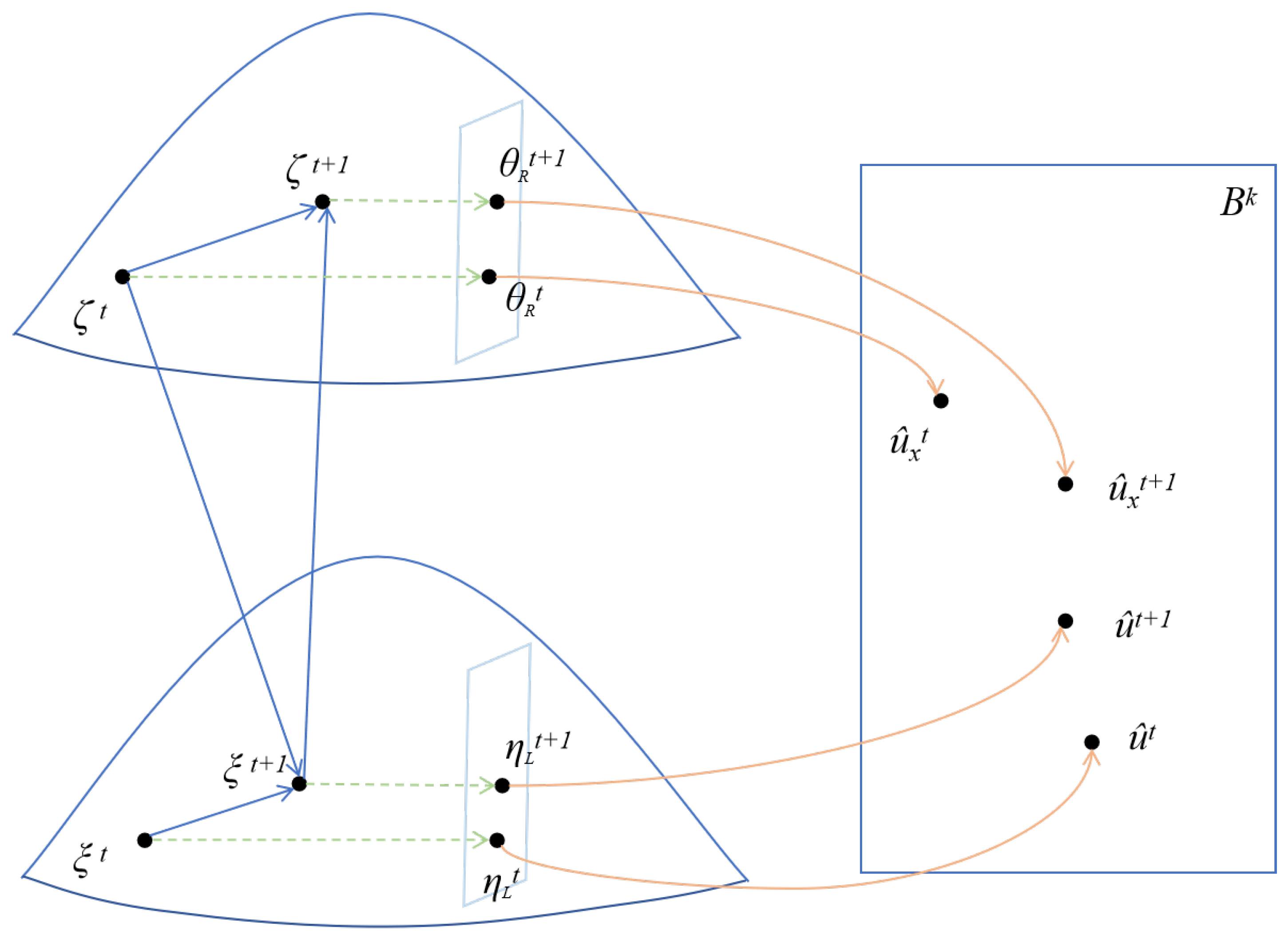
3.2. Geometric Representation of Node Information
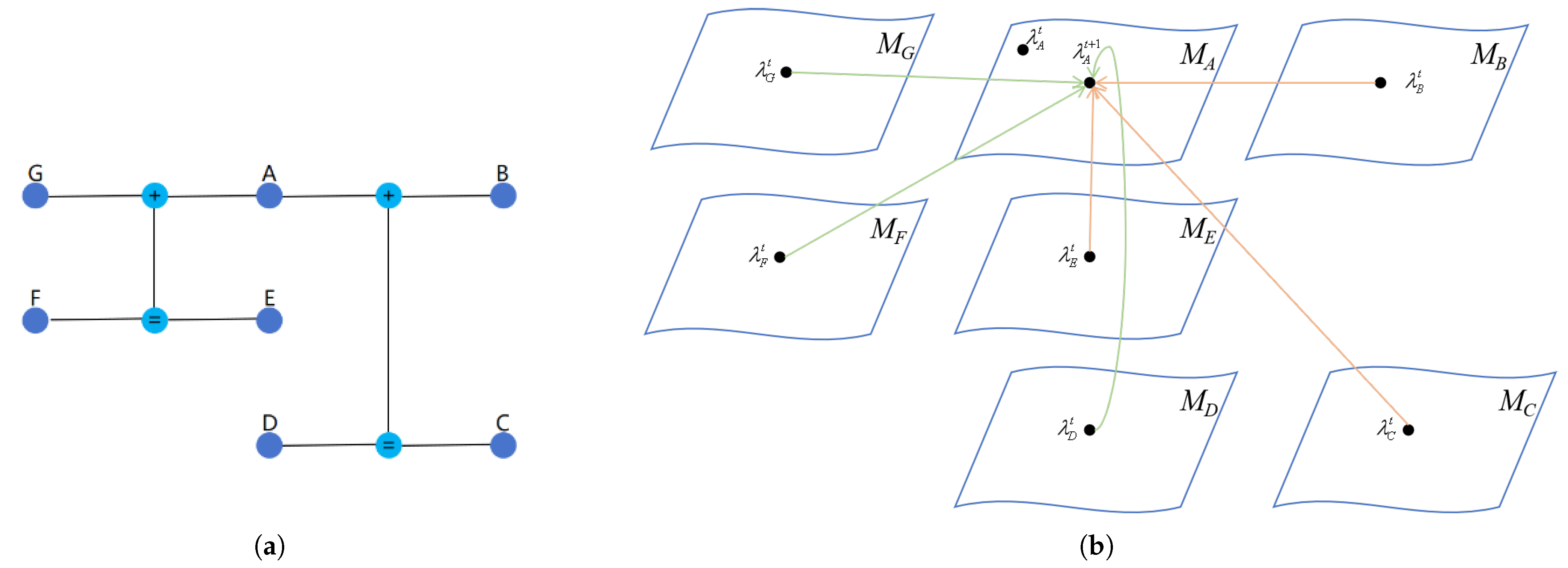
3.3. Geometric Representation of Factor Graph Information
| Algorithm 2 Polar Code BP Decoding |
|
4. Early Stopping Based on Information Geometry
4.1. Algorithm Flow
| Algorithm 3 Early Convergence Algorithm Based on Information Geometry |
|
4.2. Calculation of Geometric Distance
4.2.1. Riemann Distance
4.2.2. Divergence
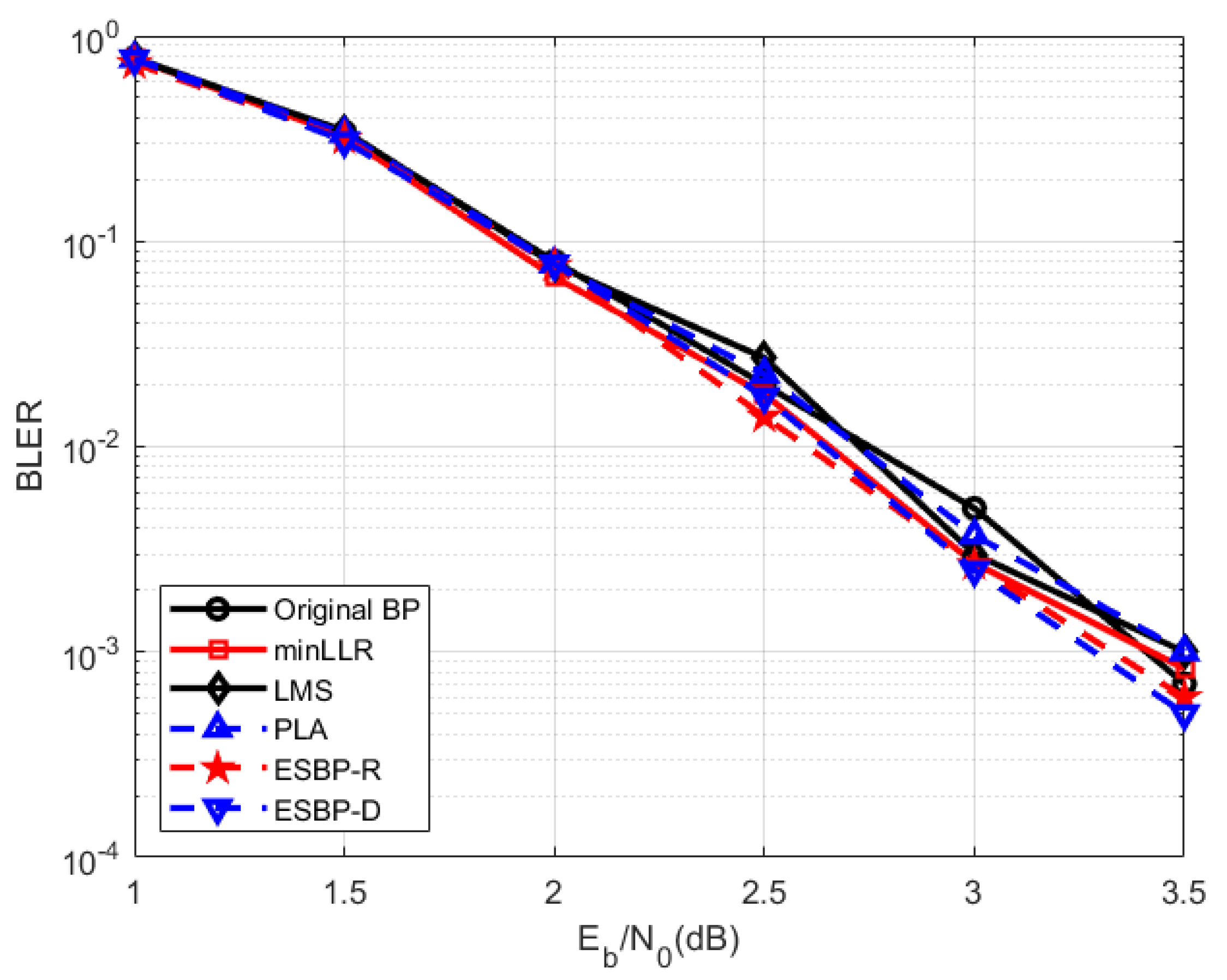
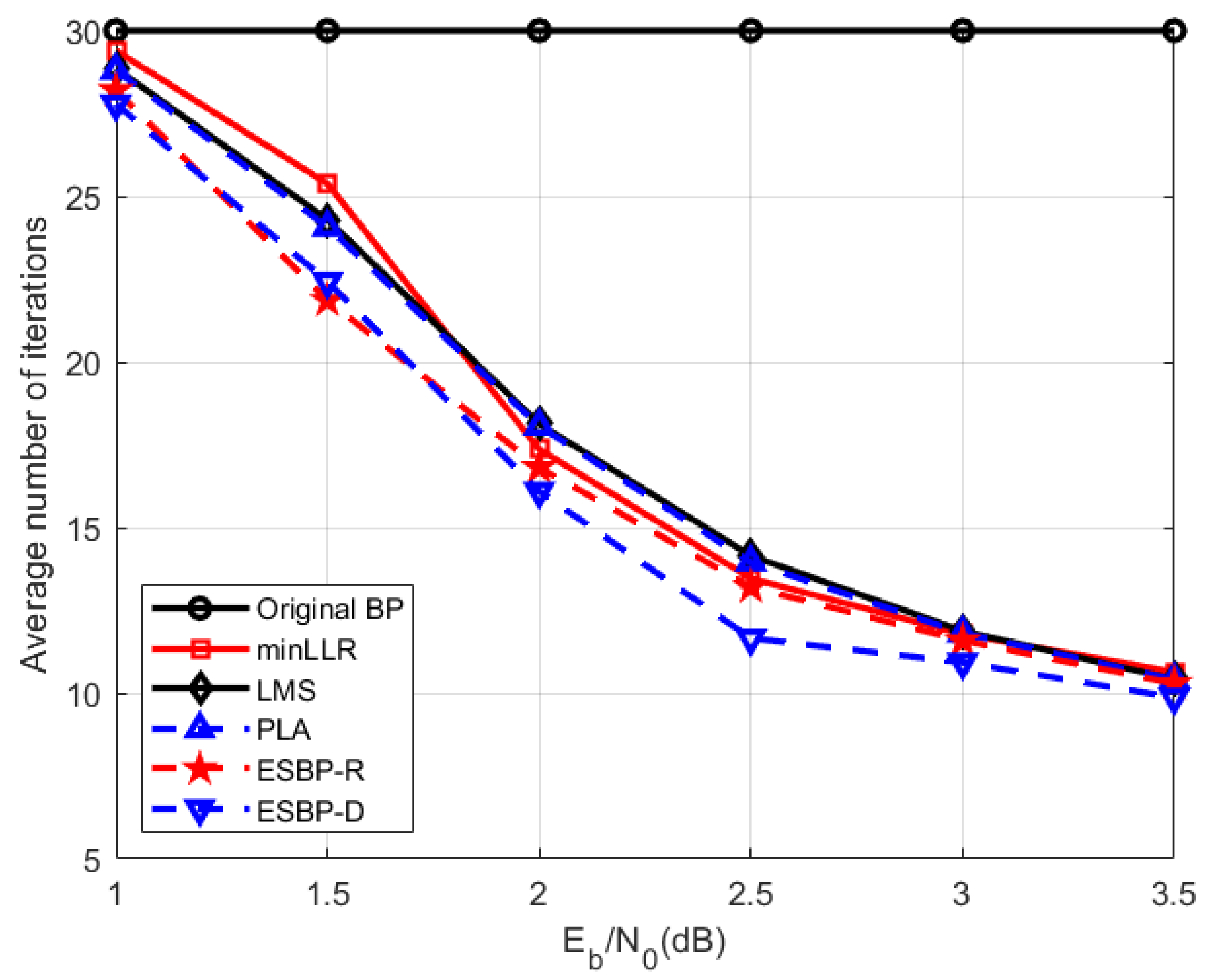
5. Simulation Results and Comparisons
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Deduction of Equation (25)
References
- Arikan, E. Channel Polarization: A Method for Constructing Capacity-Achieving Codes for Symmetric Binary-Input Memoryless Channels. IEEE Trans. Inf. Theory 2009, 55, 3051–3073. [Google Scholar] [CrossRef]
- Arikan, E. A performance comparison of polar codes and Reed-Muller codes. IEEE Commun. Lett. 2008, 12, 447–449. [Google Scholar] [CrossRef]
- Arikan, E. Polar codes: A pipelined implementation. In Proceedings of the 4th International Symposium on Broadband Communication (ISBC 2010), Melaka, Malaysia, 11–14 July 2010; Volume 2010, pp. 11–14. [Google Scholar]
- Yuan, B.; Parhi, K.K. Early stopping criteria for energy-efficient low-latency belief-propagation polar code decoders. IEEE Trans. Signal Process. 2014, 62, 6496–6506. [Google Scholar] [CrossRef]
- Zhang, S.y.; Shahrrava, B. Stopping criterion for belief propagation polar code decoders based on bits difference ratio. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 285–289. [Google Scholar] [CrossRef]
- Hasani, A.; Lopacinski, L.; Grass, E. Early stopping of BP polar decoding based on parity-check sums. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference:(VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Ren, Y.; Zhang, C.; Liu, X.; You, X. Efficient early termination schemes for belief-propagation decoding of polar codes. In Proceedings of the 2015 IEEE 11th International Conference on ASIC (ASICON), Chengdu, China, 3–6 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Simsek, C.; Turk, K. Simplified early stopping criterion for belief-propagation polar code decoders. IEEE Commun. Lett. 2016, 20, 1515–1518. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, A.; Tong, X. Early stopping criterion for belief propagation polar decoder based on frozen bits. Electron. Lett. 2017, 53, 1576–1578. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, X.; Wu, B. Simplified early stopping criterion for belief-propagation polar code decoder based on frozen bits. IEEE Access 2019, 7, 134691–134696. [Google Scholar] [CrossRef]
- Choi, S.; Yoo, H. Area-efficient early-termination technique for belief-propagation polar decoders. Electronics 2019, 8, 1001. [Google Scholar] [CrossRef]
- Yang, C.; Yang, J.; Liang, X.; Zhang, Z.; You, X.; Zhang, C. BP polar decoders with early termination and belief enhancing. In Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 19–21 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Cui, J.; Li, J.; Dong, Y.; Zhang, X.; Zeng, Q. Simplified early stopping criterion for polar codes. In Proceedings of the 2018 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Qingdao, China, 14–16 September 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ikeda, S.; Tanaka, T.; Amari, S.i. Information geometry of turbo and low-density parity-check codes. IEEE Trans. Inf. Theory 2004, 50, 1097–1114. [Google Scholar] [CrossRef]
- Zhu, C.; He, Y.; Dou, Z. Research on Enhanced Belief Propagation List Decoding Algorithm for Polar Codes in UAV Communications for 6G. Drones 2024, 8, 737. [Google Scholar] [CrossRef]
- Amari, S.i. Information Geometry and Its Applications; Applied Mathematical Sciences; Springer: Tokyo, Japan, 2016; Volume 194. [Google Scholar] [CrossRef]
- Rao, C.R. Information and the accuracy attainable in the estimation of statistical parameters. In Breakthroughs in Statistics: Foundations and Basic Theory; Springer: New York, NY, USA, 1992; pp. 235–247. [Google Scholar] [CrossRef]
- Richardson, T. The geometry of turbo-decoding dynamics. IEEE Trans. Inf. Theory 2000, 46, 9–23. [Google Scholar] [CrossRef]
- Ikeda, S.; Tanaka, T.; Amari, S.i. Information Geometrical Framework for Analyzing Belief Propagation Decoder. In Proceedings of the Advances in Neural Information Processing Systems; Dietterich, T., Becker, S., Ghahramani, Z., Eds.; MIT Press: Cambridge, MA, USA, 2001; Volume 14, pp. 407–414. [Google Scholar] [CrossRef]
- Ikeda, S.; Tanaka, T.; Amari, S.i. Information geometry of turbo codes. In Proceedings of the Proceedings IEEE International Symposium on Information Theory, Lausanne, Switzerland, 30 June–5 July 2002; p. 114. [Google Scholar] [CrossRef]
- Ikeda, S. Information geometry of turbo and LDPC codes. In Proceedings of the Proceedings. (ICASSP ’05). IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 23 March 2005; Volume 5, pp. v/1029–v/1032. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| System Parameters | |
| N | Code length |
| K | Information bits length |
| Energy-per-bit-to-noise power spectral density ratio | |
| Maximum number of iterations | |
| Algorithmic Variables | |
| , | Leftward LLR message at node |
| Rightward LLR message at node | |
| Leftward propagation vector at iteration t | |
| Rightward propagation vector at iteration t | |
| Geometric Framework | |
| Natural parameter of Bernoulli distribution | |
| Metric matrix | |
| Soft information at leftmost bit nodes | |
| Soft information at rightmost bit nodes | |
| Riemannian distance or divergence measure | |
| Fisher information matrix | |
| minLLR | LMS | PLA | ESBP-R | ESBP-D | |
|---|---|---|---|---|---|
| 1 | 2.01% | 3.81% | 4.01% | 6.01% | 7.39% |
| 1.5 | 15.42% | 19.03% | 19.78% | 27.15% | 25.27% |
| 2 | 42.14% | 39.59% | 39.81% | 43.97% | 46.38% |
| 2.5 | 55.14% | 52.87% | 53.51% | 56.01% | 61.17% |
| 3 | 60.74% | 60.43% | 60.63% | 61.40% | 63.59% |
| 3.5 | 64.55% | 65.28% | 65.31% | 65.71% | 67.12% |
| ESBP-R | ESBP-D | |
|---|---|---|
| 1 | 2.8% | 4.3% |
| 1.5 | 11.0% | 8.8% |
| 2 | 5.8% | 9.9% |
| 2.5 | 4.7% | 15.9% |
| 3 | 2.0% | 7.6% |
| 3.5 | 2.0% | 5.9% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; He, Y.; Dou, Z. Polar Code BP Decoding Optimization for Green 6G Satellite Communication: A Geometry Perspective. Axioms 2025, 14, 174. https://doi.org/10.3390/axioms14030174
Zhu C, He Y, Dou Z. Polar Code BP Decoding Optimization for Green 6G Satellite Communication: A Geometry Perspective. Axioms. 2025; 14(3):174. https://doi.org/10.3390/axioms14030174
Chicago/Turabian StyleZhu, Chuanji, Yuanzhi He, and Zheng Dou. 2025. "Polar Code BP Decoding Optimization for Green 6G Satellite Communication: A Geometry Perspective" Axioms 14, no. 3: 174. https://doi.org/10.3390/axioms14030174
APA StyleZhu, C., He, Y., & Dou, Z. (2025). Polar Code BP Decoding Optimization for Green 6G Satellite Communication: A Geometry Perspective. Axioms, 14(3), 174. https://doi.org/10.3390/axioms14030174