1. Introduction
In recent decades, cellular neural networks (CNNs) have shown their effectiveness in many application domains such as pattern identification [
1] and associative memory [
2]. In order to optimize the design of CNNs and broaden their practical applications, various dynamic characteristics of CNNs have been thoroughly investigated. In particular, the synchronization behavior of CNNs has been a focus and attracted a lot of research interest in the past few decades [
3,
4,
5,
6].
Considering the inherent uncertainty and imprecision in real systems, Yang et al. [
7] innovatively integrated fuzzy logic into the traditional cellular neural networks architecture and introduced the concept of fuzzy cellular neural networks (FCNNs) for the first time in 1966. In contrast with conventional CNNs, FCNNs show better ability when performing complex nonlinear filtering tasks, which significantly improves their adaptability and effectiveness in a variety of practical application scenarios. In view of the wide application prospects of FCNNs in many fields, it is particularly important to explore its dynamic characteristics, especially the synchronization behavior [
8,
9,
10].
As the limited information transmission speed will cause a delay effect in the implementation process of neural networks, Roska and Chua [
11] integrated the influence of time delays into the fundamental framework of conventional CNNs and pioneered the concept of time-delayed CNNs in 1990. On this basis, Wei et al. [
12] further proposed fuzzy logic to address uncertainty and investigated the FCNNs with discrete delays. Moreover, random fluctuations and other variables in the process of neurotransmitter release tend to disrupt synaptic transmission and generate random interference. Therefore, incorporating random disturbances into the analysis of the dynamic properties of CNNs is quite significant. In light of this perspective, Chen and Zhao [
13] elaborated on the notion of FSCNNs with time delays in 2008 and delved deeper into the exponential stability of such networks. At present, there are many research results about the synchronization of FSCNNs. In 2018, Zhang et al. [
14] established a class of FSCNNs defined on time scales, demonstrated the system’s exponential stability, and revealed periodic solutions. In [
15,
16,
17], the authors used the Lyapunov method and stochastic analysis techniques to design feedback and adaptive controllers, such that FSCNNs with discrete and distributed delays can achieve synchronization at a finite or fixed time.
It is worth mentioning that most researchers are primarily concerned with the synchronization problems of FSCNNs with finite time delays currently. However, some scholars have found that the totality of a neuron’s past states often exerts a profound influence on its present state and proposed the phenomenon of infinite delays [
18,
19,
20,
21]. The finite time delay means that the current state of the system is only affected by the previous time period
. It is unreasonable in some cases, because the neural network accumulates more information over time [
22], while some complex systems usually accumulate information and respond over a longer period of time. At the same time, in many practical situations, the current behavior of a neuron is related to its entire past state [
23]. Therefore, in many cases, infinite delay is more applicable. Considering infinite delay can not only help to optimize the existing FSCNNs, especially when dealing with complex systems or multi-time domain information, it can provide higher simulation accuracy, but also better simulate the long-term memory effect of real systems. That is to say that accounting for infinite delays is of importance when addressing the synchronization issue in the realm of FSCNNs. In 2010, Li and Fu [
24] established a set of theorems about the
pth moment exponential stability and global convergence properties of differential equations with infinite delay by effectively using both Razumikhin techniques and Lyapunov function method. The application of these theorems has facilitated the study of
pth moment exponential stability in a class of stochastic recurrent neural networks with infinite delays and provided insights into the synchronization of related models. But, the research on FSCNNs synchronization under infinite delays conditions is still limited. This prompted us to investigate the
pth moment exponential synchronization in FSCNNs with infinite delays in this paper.
In this paper, the Lyapunov function method and
pth moment exponential synchronization principle are used. At the same time, the related theorems of infinite delay differential equations with
pth moment exponential stability in reference [
24] are also used. Unlike the study of
pth-moment exponential synchronization in traditional cellular neural networks [
25], the neural network model studied in this paper uses a fuzzy term and infinite delays. Therefore, during the mathematical derivation, we perform additional scaling based on the mathematical characteristics of the fuzzy term and the related properties of the infinite delays. At the same time, the traditional method of verifying
pth-moment exponential synchronization is mainly based on the definition of
pth moment exponential synchronization [
26]. However, considering the addition of infinite delays, based on the study of infinite delays in reference [
24], in this paper, we use the Lyapunov function method and inequality scaling to study the
pth moment exponential synchronization of FSCNNs. At the same time, the conditions for the realization of
pth-moment exponential synchronization of FSCNNs with infinite delays are given and proved. The purpose is to study the synchronization issue of a class of FSCNNs with both infinite and discrete delays.
. The symbol is used, as well as the positive real number set . The n-dimensional Euclidean space is represented by the symbol . The expected value in mathematics is represented by . represents the Itô differential operator, which is derived from the Itô formula. The function represents the sign function. The complete probability space has as the -algebra of , as the probability measure defined therein, and as the set of all possible basic results of random experiments. The filter in this space is right continuous, meaning it satisfies the standard condition. Its initial value contains all zero sets. Additionally, is a symbol for the Euclidean norm for vectors. The symbol , , indicates the class of nonnegative functions that are linearly and quadratically differentiable for t and x, respectively. is the space of bounded and continuously differentiable functions on the closed interval and its range is in . is a mathematical operation that takes a smaller value or a minimum value between and .
2. Materials and Methods
Consider the
n-dimensional stochastic functional differential equation system with infinite delays:
where
,
and the initial value is
.
can be regarded as a
value random process, where
. In particular, when
, the interval
is interpreted as
.
,
The set of
-measurable random variables
that take values in
and satisfy
is represented by
.
Definition 1 ([
27,
28]).
For any initial state , if and λ are positive constants, and the inequality holds, then the equilibrium solution of system (1) is said to be pth moment exponentially stable. When , the system is typically referred to as the mean square exponential stability. Lemma 1 ([
24]).
Suppose , , and p are positive, and . Suppose there exists a function and positive numbers λ, η, such that the following conditions hold: (i) for all ; (ii) , whenever for all , where . Under infinite delays, the equilibrium solution of the Equation (1) exhibits pth-moment exponential stability, and the pth moment Lyapunov exponent is less than . A category of FSCNNs with discrete and infinite delays is examined in this paper. Its mathematical expression is as follows:
For each , denotes the state of the ith neuron at time t, and is the passive decay rate of the ith neuron’s state. The feedback template elements are represented by the parameters , , and . The jth neuron’s activation functions are represented by the functions , , and . represents the noise intensity that affects the ith neuron. The variable represents the input stimulus of the ith neuron, and represents the deviation of the ith neuron. and symbolize the components of the fuzzy feedback MIN template, whereas and embody the constituents of the fuzzy feedback MAX structure. The elements and belong to the fuzzy feedforward MIN and MAX templates, respectively. represents the time delay, and the kernel delay function is a continuous, non-negative real-valued function that is defined over a given interval and complies with certain requirements that are explained later. where is a continuous function satisfying the integral constraint with being a positive constant. In addition, is a term with distributed infinite time delay. is a term with a discrete time delay, where represents the signal transmission delay between the ith neuron and jth neuron.
Remark 1. Compared with the FSCNNs with bounded time delays in reference [13,14,15], our model has infinite time delays, which is more appropriate to the real world and has a wider role. In this section, we regard system (
2) as the drive system of the problem to be studied. The response system of FSCNNs with controllers is as follows:
At time
t, the
ith neuron’s state is represented by
, and
provides an appropriate controller intended to accomplish
pth-moment exponential synchronization between the systems (
2) and (
3). The synchronization error of the
ith neuron is defined as
in order to assess the synchronization between the two systems. The system’s overall synchronization error dynamics is represented as follows:
For the system (
2), the specified initial condition is the vector-valued function
, where
takes any value in the interval
. Similarly, for the system (
3), the initial condition
. In order to guarantee that there are solutions to the systems represented by Equations (
2) and (
3) in their respective initial states, we always assume that functions
f and
g meet all requirements in this work. When examining the error system (
4) contained in the equation, the initial condition is defined accordingly: the initial state vector of the error, denoted as
.
Lemma 2 ([
24]).
If is an integral number, then there is a positive number , such that, .
Lemma 3 ([
29]).
For and , , equality holds only if , for all . Lemma 4 ([
7]).
Assuming that and are the two states of the system (2), there are , . Assumption 1. The functions , and conform to the Lipschitz condition, and there exist three positive constants , , and , fulfilling the condition thatfor all . Assumption 2. The noise intensity function satisfies the Lipschitz condition, with two constants and , such that: Assumption 3. , .
3. Results
A feedback controller
is designed in this section to synchronize the systems (
2) and (
3) exponentially in the
pth moment. The design of the feedback controller proceeds as follows:
where
, the non-negative number
is the gain coefficient, and
is an undetermined constant, and
is the sign function.
Theorem 1. Under Assumptions (1, 2, 3), it is demonstrated that Systems (2) and (3) synchronize exponentially in the pth moment with the proposed feedback controller if the following conditions hold: Proof. Initially, a proposed Lyapunov function is constructed as
, where
signifies the solution to system (
4). From Lemma 2, it follows that
then, we can deduce
, in which,
,
.
The
can be derived using the Itô formula,
By using Lemma 3, we can obtain
and
From the Cauchy Schwartz inequality, we have
Based on Lemma 4 and Lemma 3, it follows that
and
and
According to Lemma 3, we can obtain
and
and
From the above inequality (
8) to (
17), we can derive
Based on (
6), we can then take the mathematical expectation and obtain
Whenever
for all
, we can obtain
Substituting (
19) into the terms containing infinite delays in (
18), we have
and
and
and
From the above inequality, we can derive
When condition (
6) is satisfied, we take the positive scalars
to satisfy
At this time, we obtain
According to Lemma 1, system (
4) satisfies
pth-moment exponential stability, indicating that system (
2) and system (
3) are synchronized with
pth-moment exponents.
4. Numerical Simulation
To achieve
pth-moment exponential synchronization, a feedback controller for FSCNNs with discrete and infinite delays is designed in the previous section. This section provides a numerical simulation to validate the effectiveness of the proposed control strategy. By choosing
, the drive system can be described as follows:
For all
,
,
,
,
,
,
. Let
, then
,
,
,
,
,
,
,
. The kernel delay function
can be taken as
,
,
,
,
,
,
,
. Let parameters
,
,
, and it can be concluded that
.
satisfies Assumption 2 when
,
. Across coefficients
,
,
,
, and the rest is equated to 0. The values of
,
,
,
,
, and
, are in
Table 1, and any unmentioned values are zero.
The following is the response system:
Let
, then
,
,
,
,
,
,
,
. Through the system (
24) and (
25), we can obtain the expression of the error system
The design of the feedback controller is as follows:
in which,
,
,
,
and other quantities not mentioned are 0.
By computing the values for the aforementioned parameters, one can verify the conditions stated in Theorem 1,
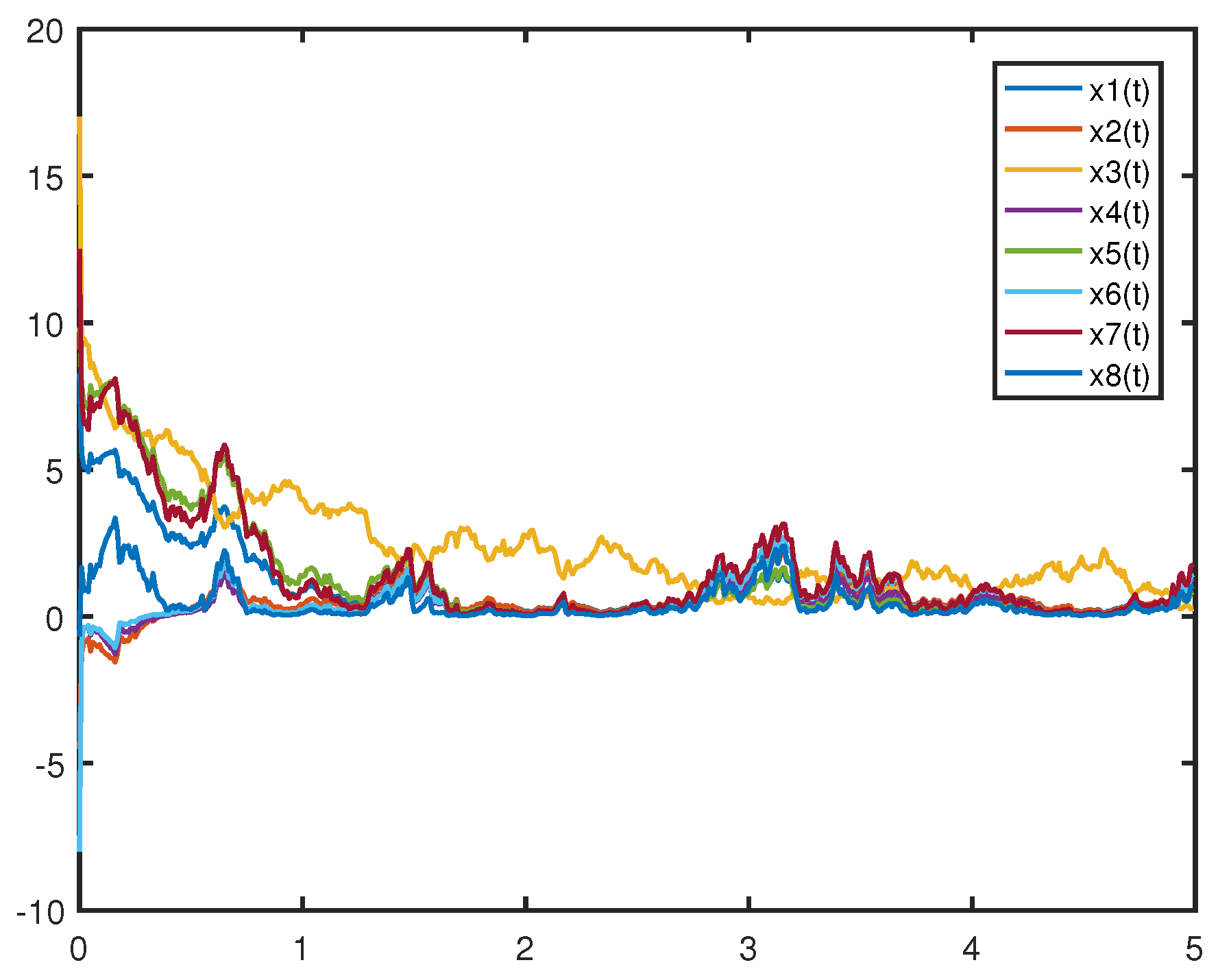
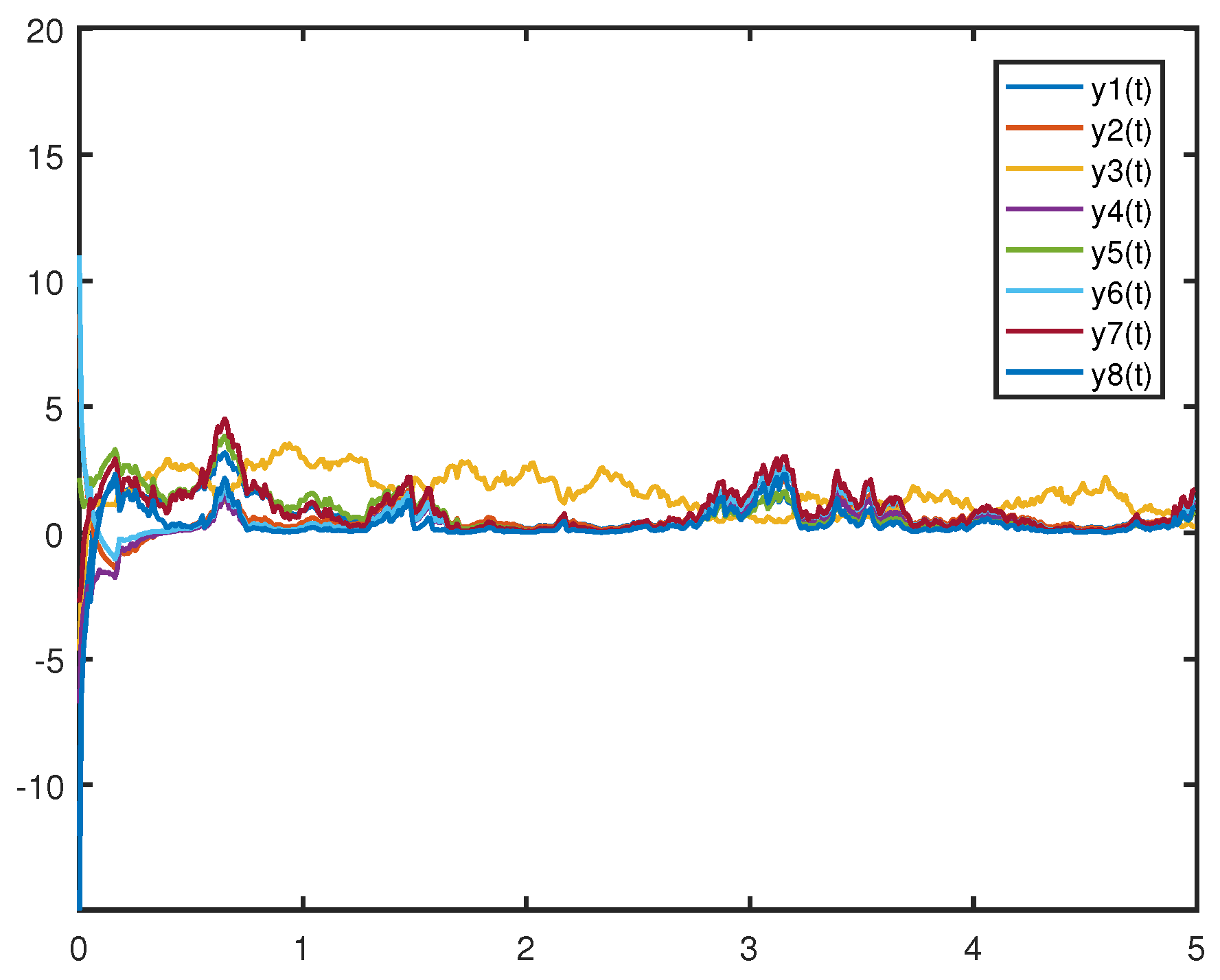
The trajectories of the drive system (
24) and response system (
25) are shown in
Figure 1 and
Figure 2, respectively.
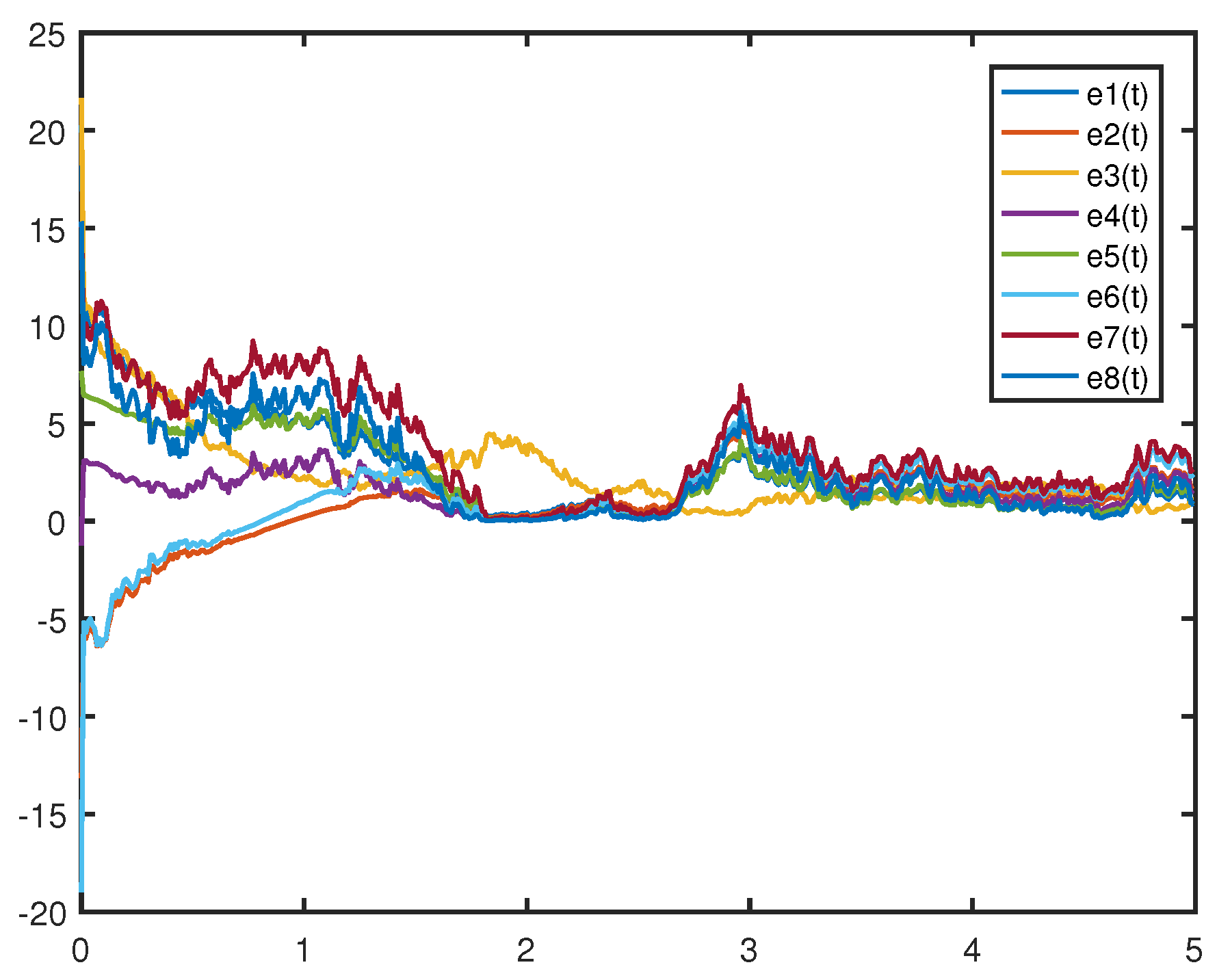
Figure 3 shows that the error system (
26) in the absence of control does not tend to zero, which implies that drive system (
24) and response system (
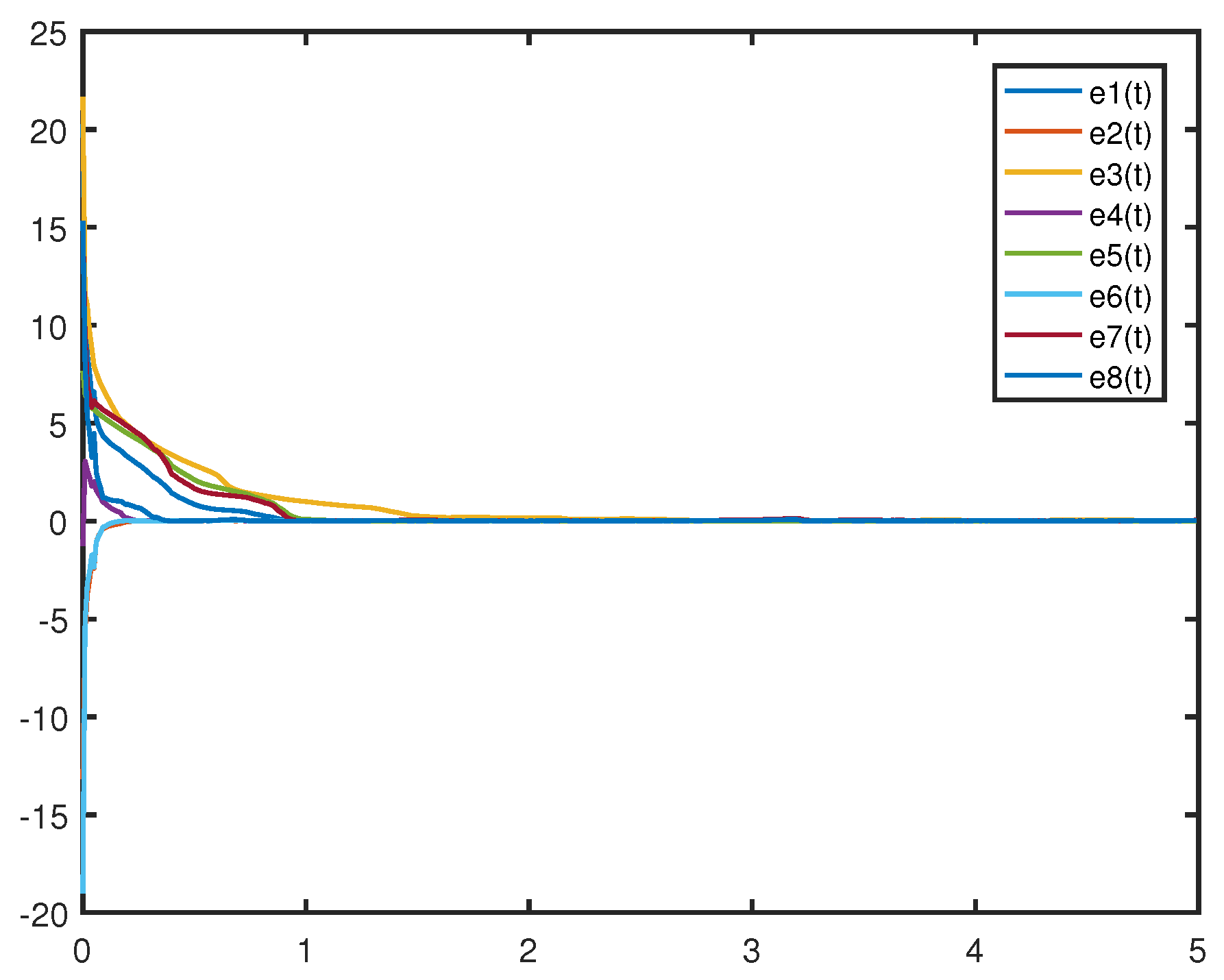
25) can not achieve synchronization without control. Obviously, the drive system (
24) and the response system (
25) are gradually synchronized under the action of the feedback controller, because the trajectories of error system (
26) with control in
Figure 4 gradually drops to zero. The validity of Theorem 1 is verified.
5. Conclusions
In this paper, we investigate the synchronization problem of FSCNNs with discrete and infinite delays. By using a feedback controller, we obtain some pth-moment exponential synchronization criterion for the neural networks. Moreover, we provide a numerical simulation example to verify the effectiveness of our results. At present, the research on the synchronization of neural networks with delays is mainly focused on the network with finite delays, and there is not much research on the neural networks with infinite delays. Our paper provides some new results on infinite delay networks.
Through Theorem 1, we can limit the coefficient values of the controller so that the network achieves synchronization. However, the form of the decision conditions and the calculation of some values in Theorem 1, such as , are more complicated. On the basis of this study, perhaps we can try to use adaptive controller, fuzzy controller, state feedback controller, and other means to study the synchronization control of FSCNNs with infinite delays, so as to obtain a conclusion with a lower computational complexity. At the same time, we can also try to consider the topological structure of FSCNNs on the basis of the original research, so as to better optimize the control strategy and improve the synchronization control efficiency.
There are many interesting questions that deserve to be investigated for FSCNNs with infinite delays. The neural network in this paper is affected by continuous random perturbations (white noise). In fact, discontinuous random perturbations (Levy noise) should also be considered that can be used to describe the sudden external influences. Moreover, we obtain the asymptotic synchronization of FSCNNs with infinite delays, but it is not clear whether FSCNNs can achieve synchronization at a finite or fixed time.




{kind=link}
{kind=link}
{kind=link}
{kind=link}