
Reliability Analysis and Numerical Simulation of the Five-Robot System with Early Warning Function


Abstract
1. Introduction
2. Model Description
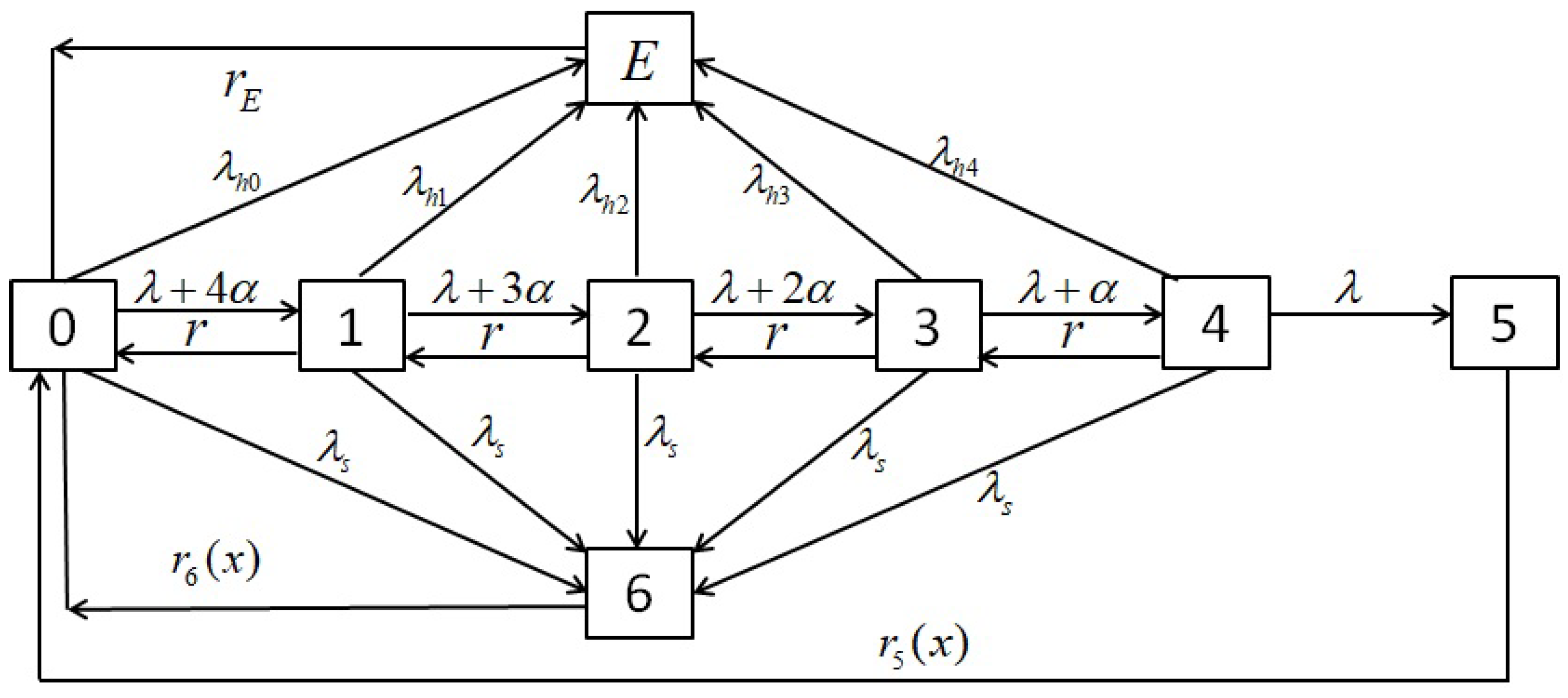
2.1. Background Description of the Five-Robot System Model
- Failures occur randomly and independently.
- The entire system comprises one robot, safety devices, and four redundant warm standby robots.
- All five robots share an identical structure and are restored to a like-new condition.
- The entire system enters a failure state only when all five robots fail, or when the safety device fails for conventional reasons.
- The lifetime of the system in state i is described by the distribution,
- The distribution of the lifetime X of the robot under normal working conditions isthe distribution function of its repair time and a probability density function is
- The distribution of the lifetime of the robot in the thermal reserve state is described by
- The repair of the safety device is equivalent to a new condition, and the distribution of the lifetime Y of the safety device isthe distribution function of the repair time and the probability density function is
- Let represent the repair time required by the system after each failure, with a distribution function and the probability density functions and that satisfyand
- are mutually independent variables.
- State 0: One robot and the safety device in the five-robot system are functioning normally, while four robots remain in hot standby status.
- State 1: One robot and the safety device in the five-robot system are functioning normally, one robot has malfunctioned, and three robots are in a hot standby status.
- State 2: One robot and the safety device in the five-robot system are functioning normally, two robots have malfunctioned, and two robots are in a hot standby status.
- State 3: One robot and the safety device in the five-robot system are functioning normally, three robots have malfunctioned, and one robot is in a hot standby status.
- State 4: One robot and the safety device in the system are functioning normally, while four robots have malfunctioned.
- State 5: The state of the five-robot system is due to the malfunction of all five robots.
- State 6: The state of the five-robot system is a result of the malfunction of the safety device.
- State E: The state of the five-robot system resulting from routine failures.
2.2. Notation
- t denotes time.
- i denotes the ith state of the five-robot system.
- denotes the probability that the five-robot system occupies state i, for , at time t.
- denotes the probability that, at time t, the failed five-robot system in state is undergoing repair and that the elapsed repair time falls within the interval , where .
- denotes the steady-state probability that the five-robot system occupies state i, for .
- denotes the constant damage rate resulting from the robot’s inherent factors.
- denotes the constant normal damage rate from states to state E.
- denotes the constant human-induced failure rate of the work system transitioning from states to state 6.
- denotes the constant damage rate of thermal reserve robots.
- r denotes the constant repair rate of normal working robots transitioning from state to state i.
- denotes the constant repair rate of the operating system transitioning from state E to state 0.
- denotes the repair rates from state to state 0. It satisfies the conditions: ,, and . Additionally, .
2.3. Formulation of the Five-Robot System Model
3. Stability Analysis
3.1. Constructing the System Model Based on the Abstract Cauchy Problem
3.2. The Well-Posedness Analysis
3.3. Asymptotic Stability
3.4. Analysis of the Properties of the Main Operator
4. Reliability Indicators and Solutions
4.1. Reliability Index
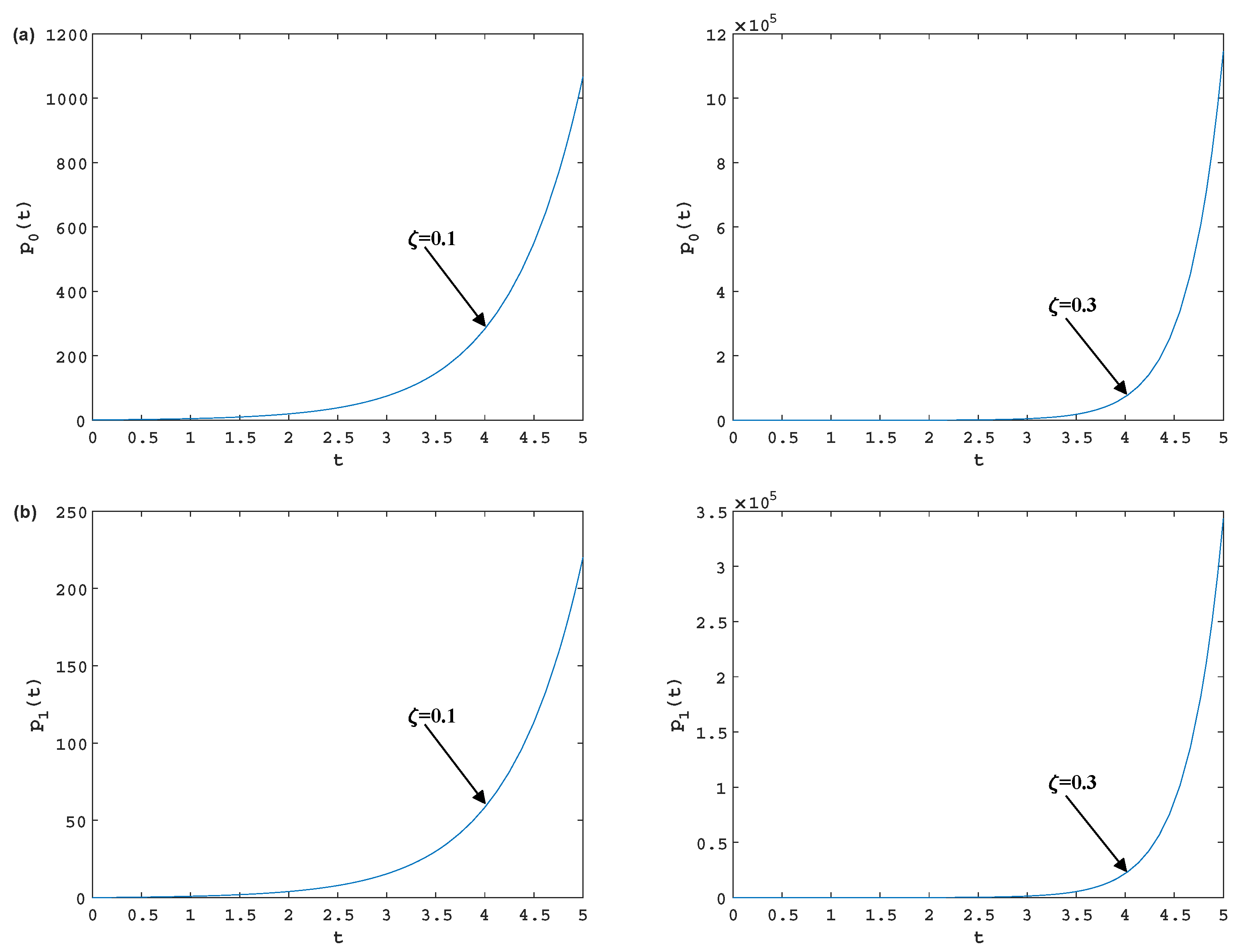
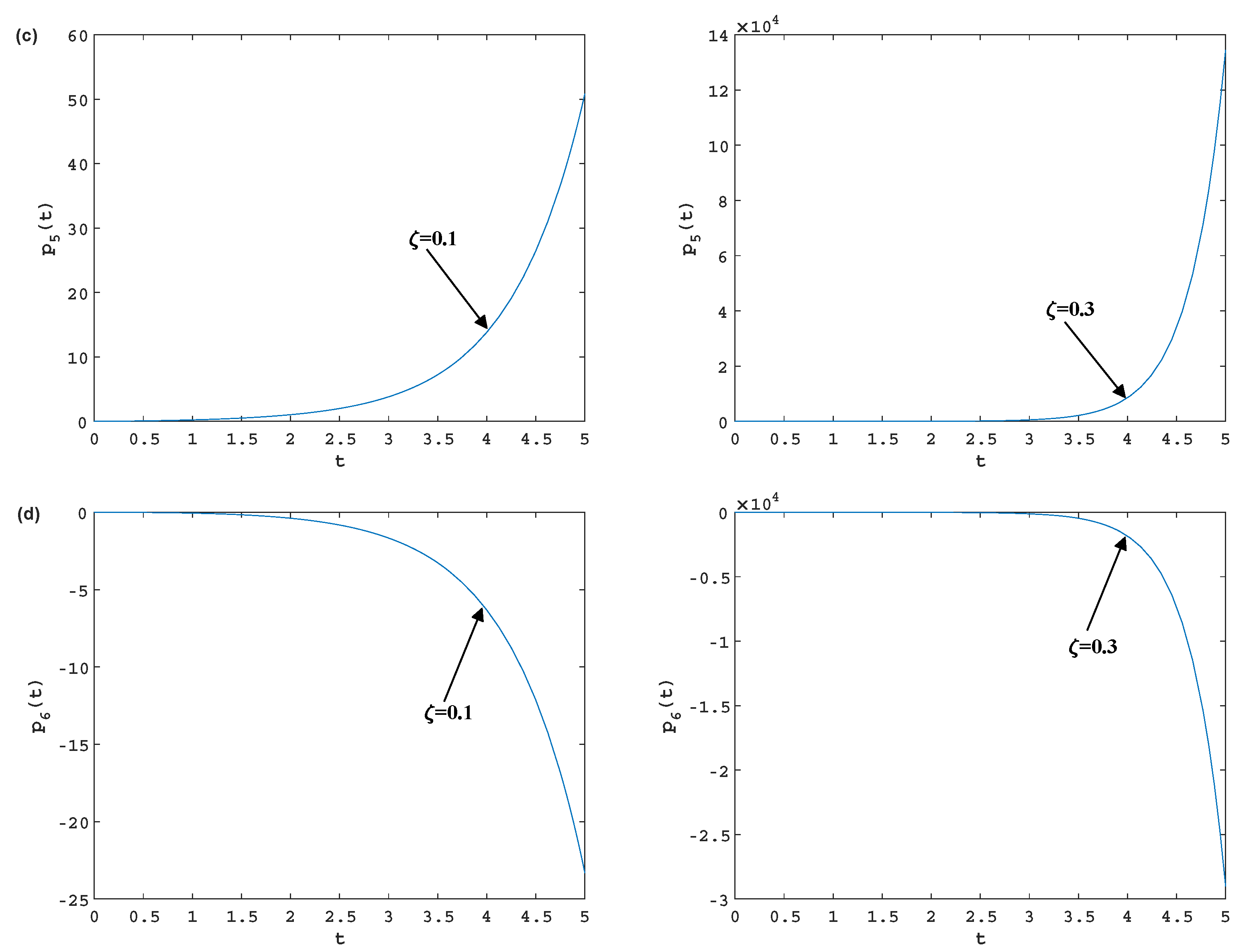
4.2. Analytical and Numerical Solutions
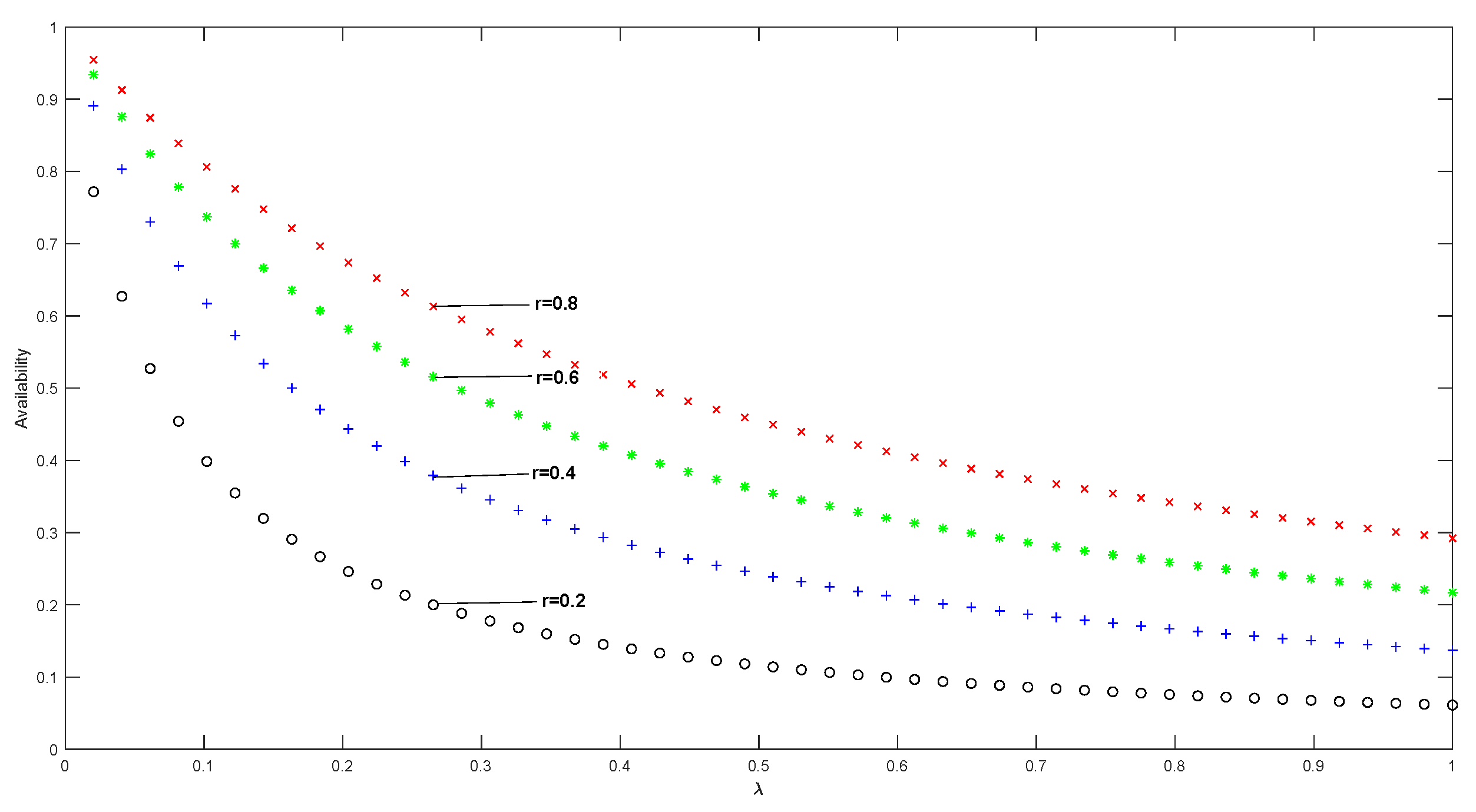
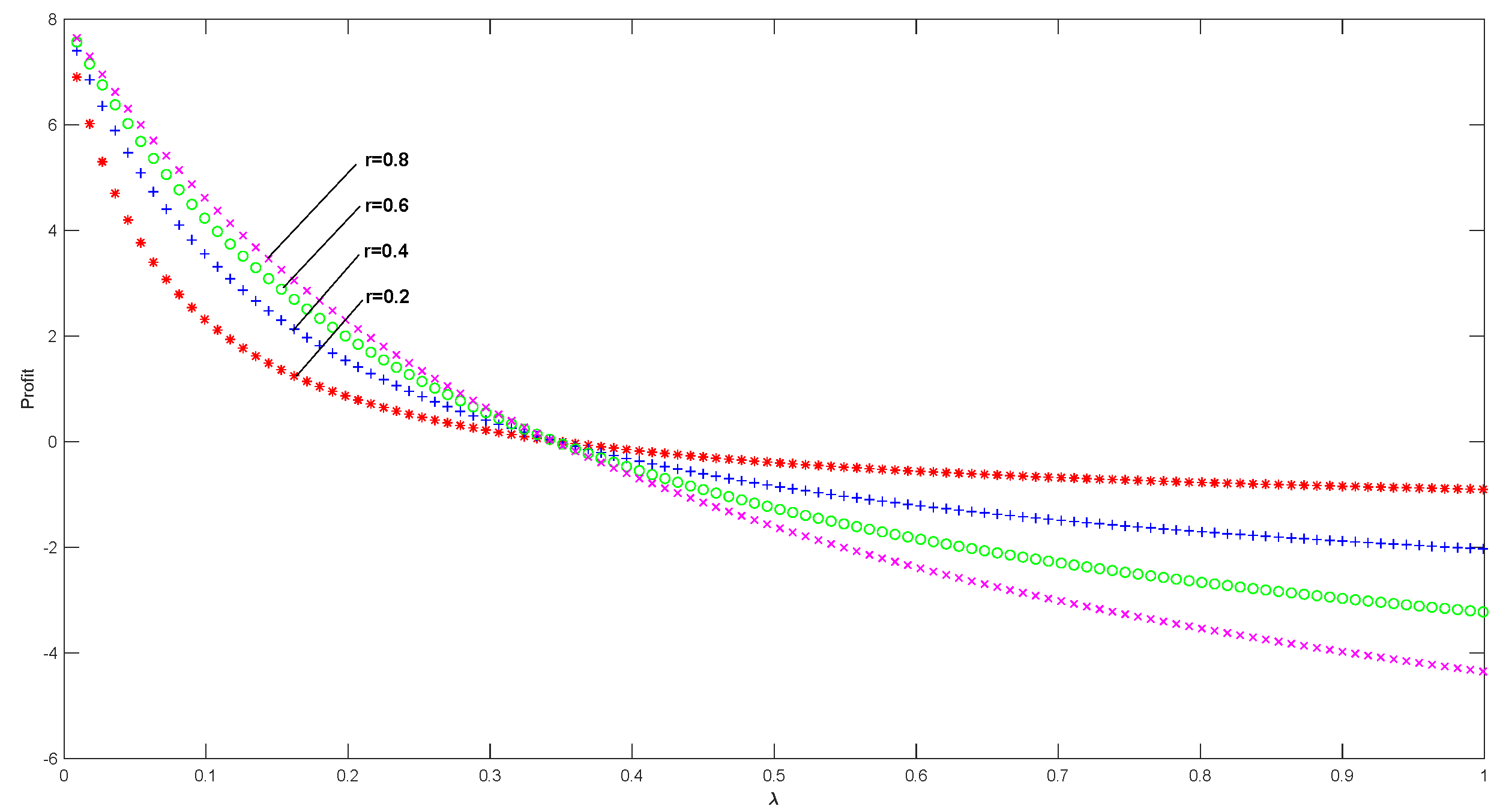
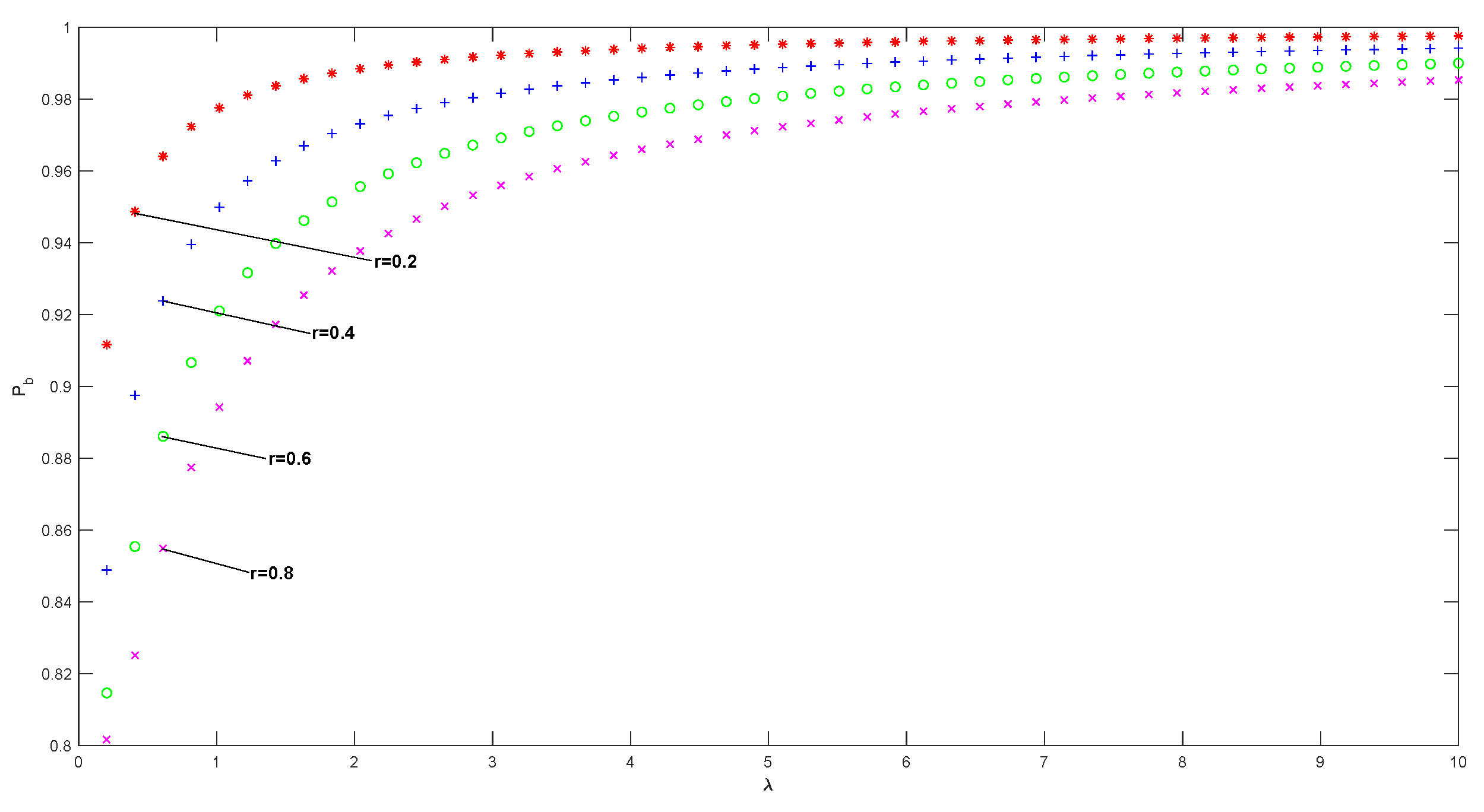
5. Availability Analysis Based on Numerical Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dhillon, B.S.; AnudeIncome, O.C. Optimization of a repairable and redundant system. Microelectron. Reliab. 1994, 34, 1709–1720. [Google Scholar] [CrossRef]
- Yang, N.; Dhillon, B.S. Stochastic analysis of a general standby system with constant human error and arbitrarily system repair rates. Microelectron. Reliab. 1995, 35, 1037–1045. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Y.; Ji, W.; Wang, L. A Context-Aware Safety System for Human-Robot Collaboration. Procedia Manuf. 2018, 17, 238–245. [Google Scholar] [CrossRef]
- Zheng, K.; Hu, Y.; Wu, B. Intelligent fuzzy sliding mode control for complex robot system with disturbances. Eur. J. Control 2020, 51, 95–109. [Google Scholar] [CrossRef]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human-robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef]
- Leite, A.; Pinto, A.; Matos, A. A safety monitoring model for a faulty mobile robot. Robotics 2018, 7, 32. [Google Scholar] [CrossRef]
- Huang, Y.; Xiang, X.; Zhou, H.; Yan, C.; Chang, Y.; Sun, Y. Multi-robot self-organizing cooperative pursuit method based on probabilistic graphical model. Control. Theory Appl. 2023, 40, 2225–2235. [Google Scholar]
- Reza, G.; Mehdi, M.F. Robust Control of Robotic Manipulators in the Task-Space Using an Adaptive Observer Based on Chebyshev Polynomials. J. Syst. Sci. Complex. 2020, 33, 1360–1382. [Google Scholar]
- Qiao, X.; Ma, D.; Yao, X.; Feng, B. Stability and Numerical Analysis of a Standby System. J. Shanghai Jiaotong Univ. Sci. 2020, 25, 769–778. [Google Scholar] [CrossRef]
- Gerasimos, R. A Nonlinear Optimal Control Approach for Tracked Mobile Robots. J. Syst. Sci. Complex. 2021, 34, 1279–1300. [Google Scholar]
- Wang, S.; Lu, S. Dynamic Optimization of Robot Automatic Control System Based on Differential Algebraic Equations. Appl. Math. Nonlinear Sci. 2023, 8, 3149–3158. [Google Scholar] [CrossRef]
- Jiang, H.; Yang, F. Application of industrial robot based on infrared sensor technology in monitoring of electrical equipment. Appl. Math. Nonlinear Sci. 2024, 9, 1–16. [Google Scholar] [CrossRef]
- Ke, X.; Liu, S. Exponential Stability of Impulsive Neutral Stochastic Functional Differential Equations with Markovian Switching. J. Syst. Sci. Complex. 2023, 36, 1560–1582. [Google Scholar]
- Jain, M.; Rakhee; Singh, M. Bilevel control of degraded machining system with warm standbys, setup and vacation. Appl. Math. Model. 2004, 28, 1015–1026. [Google Scholar] [CrossRef]
- Ke, J.C.; Wang, K.H. Vacation policies for machine repair problem with two type spares. Appl. Math. Model. 2007, 31, 880–894. [Google Scholar] [CrossRef]
- Gaver, D.P. Time to failure and availability of paralleled systems with repair. IEEE Trans. Reliab. 1963, 12, 30–38. [Google Scholar] [CrossRef]
- Pazy, A. Semigroups of Linear Operators and Applications to Partial Differential Equations; Springer Science Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Gurtin, M.E.; MacCamy, R.C. Non-linear age-dependent population dynamics. Arch. Ration. Mech. Anal. 1974, 54, 281–300. [Google Scholar] [CrossRef]
- Dunford, N.; Schwartz, J.T. Linear Operators Part I: General Theory; Interscience Publishers: New York, NY, USA, 1958. [Google Scholar]
- Arendt, W. Resolvent positive operators. Proc. Lond. Math. Soc. 1987, 3, 321–349. [Google Scholar] [CrossRef]
- Zhang, X. Reliability analysis of a cold standby repairable system with repairman extra work. J. Syst. Sci. Complex. 2015, 28, 1015–1032. [Google Scholar] [CrossRef]
- Wang, Y.; Qiao, X.; Zhan, B.; Ma, D.; Zhao, G. The Stability and Reliability Analysis of a System Containing Two Redundant Robots. In Proceedings of the 2014 Sixth International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2014; Volume 1, pp. 288–291. [Google Scholar]
- Yuan, W.; Xu, G. Spectral analysis of a two unit deteriorating standby system with repair. WSEAS Trans. Math. 2011, 10, 125–138. [Google Scholar]
- Taylor, A.E.; Lay, D.C. Introduction to Functional Analysis; Wiley: New York, NY, USA, 1958. [Google Scholar]
- Arendt, W.; Grabosch, A.; Greiner, G.; Moustakas, U.; Nagel, R.; Schlotterbeck, U.; Groh, U.; Lotz, H.P.; Neubrander, F. One-Parameter Semigroups of Positive Operators; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- MATLAB. 9.6.0.1.1072779. MathWorks. March 2019. Available online: https://ww2.mathworks.cn/products/matlab.html (accessed on 12 March 2019).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.1 | 0.079 | 0.244 | 0.403 | 0.529 | 0.622 | 0.690 | 0.741 | 0.780 | 0.809 |
| 0.2 | 0.041 | 0.137 | 0.250 | 0.357 | 0.449 | 0.525 | 0.587 | 0.637 | 0.678 |
| 0.3 | 0.028 | 0.095 | 0.181 | 0.269 | 0.350 | 0.422 | 0.485 | 0.538 | 0.583 |
| 0.4 | 0.021 | 0.073 | 0.141 | 0.215 | 0.287 | 0.353 | 0.412 | 0.465 | 0.511 |
| 0.5 | 0.017 | 0.059 | 0.116 | 0.179 | 0.243 | 0.303 | 0.359 | 0.409 | 0.454 |
| 0.6 | 0.014 | 0.050 | 0.099 | 0.154 | 0.210 | 0.266 | 0.317 | 0.365 | 0.409 |
| 0.7 | 0.012 | 0.043 | 0.086 | 0.135 | 0.186 | 0.236 | 0.285 | 0.330 | 0.372 |
| 0.8 | 0.010 | 0.038 | 0.076 | 0.120 | 0.166 | 0.213 | 0.258 | 0.301 | 0.341 |
| 0.9 | 0.009 | 0.030 | 0.061 | 0.098 | 0.137 | 0.177 | 0.217 | 0.256 | 0.292 |
| 0.1 | 0.046 | 0.141 | 0.234 | 0.308 | 0.363 | 0.403 | 0.432 | 0.454 | 0.471 |
| 0.2 | 0.047 | 0.157 | 0.288 | 0.412 | 0.520 | 0.609 | 0.682 | 0.742 | 0.790 |
| 0.3 | 0.047 | 0.163 | 0.311 | 0.463 | 0.605 | 0.732 | 0.841 | 0.935 | 1.015 |
| 0.4 | 0.047 | 0.166 | 0.323 | 0.493 | 0.659 | 0.813 | 0.951 | 1.074 | 1.182 |
| 0.5 | 0.047 | 0.168 | 0.331 | 0.513 | 0.696 | 0.870 | 1.032 | 1.179 | 1.311 |
| 0.6 | 0.047 | 0.169 | 0.337 | 0.527 | 0.722 | 0.913 | 1.093 | 1.260 | 1.413 |
| 0.7 | 0.047 | 0.170 | 0.341 | 0.537 | 0.743 | 0.946 | 1.142 | 1.326 | 1.496 |
| 0.8 | 0.047 | 0.171 | 0.344 | 0.545 | 0.759 | 0.973 | 1.181 | 1.379 | 1.565 |
| 0.9 | 0.047 | 0.171 | 0.347 | 0.552 | 0.771 | 0.994 | 1.213 | 1.424 | 1.624 |
| 0.1 | 0.45 | 1.39 | 2.29 | 3.00 | 3.53 | 3.91 | 4.20 | 4.42 | 4.59 |
| 0.2 | 0.14 | 0.47 | 0.85 | 1.21 | 1.51 | 1.76 | 1.96 | 2.13 | 2.27 |
| 0.3 | 0.03 | 0.11 | 0.20 | 0.30 | 0.38 | 0.45 | 0.51 | 0.56 | 0.60 |
| 0.4 | −0.02 | −0.08 | −0.16 | −0.25 | −0.34 | −0.43 | −0.51 | −0.58 | −0.64 |
| 0.5 | −0.06 | −0.20 | −0.40 | −0.62 | −0.84 | −1.06 | −1.26 | −1.44 | −1.61 |
| 0.6 | −0.08 | −0.28 | −0.56 | −0.88 | −1.21 | −1.53 | −1.83 | −2.12 | −2.38 |
| 0.7 | −0.09 | −0.34 | −0.68 | −1.07 | −1.49 | −1.90 | −2.29 | −2.66 | −3.01 |
| 0.8 | −0.11 | −0.38 | −0.77 | −1.22 | −1.71 | −2.19 | −2.66 | −3.11 | −3.53 |
| 0.9 | −0.12 | −0.42 | −0.84 | −1.35 | −1.88 | −2.43 | −2.97 | −3.48 | −3.98 |
| 0.1 | 0.971 | 0.915 | 0.867 | 0.839 | 0.826 | 0.826 | 0.832 | 0.844 | 0.859 |
| 0.2 | 0.985 | 0.950 | 0.910 | 0.875 | 0.848 | 0.828 | 0.814 | 0.806 | 0.802 |
| 0.3 | 0.990 | 0.965 | 0.934 | 0.903 | 0.875 | 0.852 | 0.834 | 0.819 | 0.808 |
| 0.4 | 0.992 | 0.973 | 0.948 | 0.921 | 0.896 | 0.873 | 0.854 | 0.837 | 0.824 |
| 0.5 | 0.994 | 0.978 | 0.957 | 0.934 | 0.911 | 0.890 | 0.871 | 0.854 | 0.839 |
| 0.6 | 0.995 | 0.982 | 0.963 | 0.943 | 0.923 | 0.903 | 0.885 | 0.868 | 0.853 |
| 0.7 | 0.996 | 0.984 | 0.968 | 0.950 | 0.931 | 0.913 | 0.896 | 0.880 | 0.865 |
| 0.8 | 0.996 | 0.986 | 0.972 | 0.956 | 0.939 | 0.922 | 0.905 | 0.890 | 0.876 |
| 0.9 | 0.997 | 0.987 | 0.975 | 0.960 | 0.944 | 0.928 | 0.913 | 0.899 | 0.885 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, X.; Ma, D.; Guo, S. Reliability Analysis and Numerical Simulation of the Five-Robot System with Early Warning Function. Axioms 2025, 14, 113. https://doi.org/10.3390/axioms14020113
Qiao X, Ma D, Guo S. Reliability Analysis and Numerical Simulation of the Five-Robot System with Early Warning Function. Axioms. 2025; 14(2):113. https://doi.org/10.3390/axioms14020113
Chicago/Turabian StyleQiao, Xing, Dan Ma, and Shuang Guo. 2025. "Reliability Analysis and Numerical Simulation of the Five-Robot System with Early Warning Function" Axioms 14, no. 2: 113. https://doi.org/10.3390/axioms14020113
APA StyleQiao, X., Ma, D., & Guo, S. (2025). Reliability Analysis and Numerical Simulation of the Five-Robot System with Early Warning Function. Axioms, 14(2), 113. https://doi.org/10.3390/axioms14020113