
Analysis of Traub’s Method for Cubic Polynomials


Abstract
1. Introduction
2. Dynamical Study of the Methods
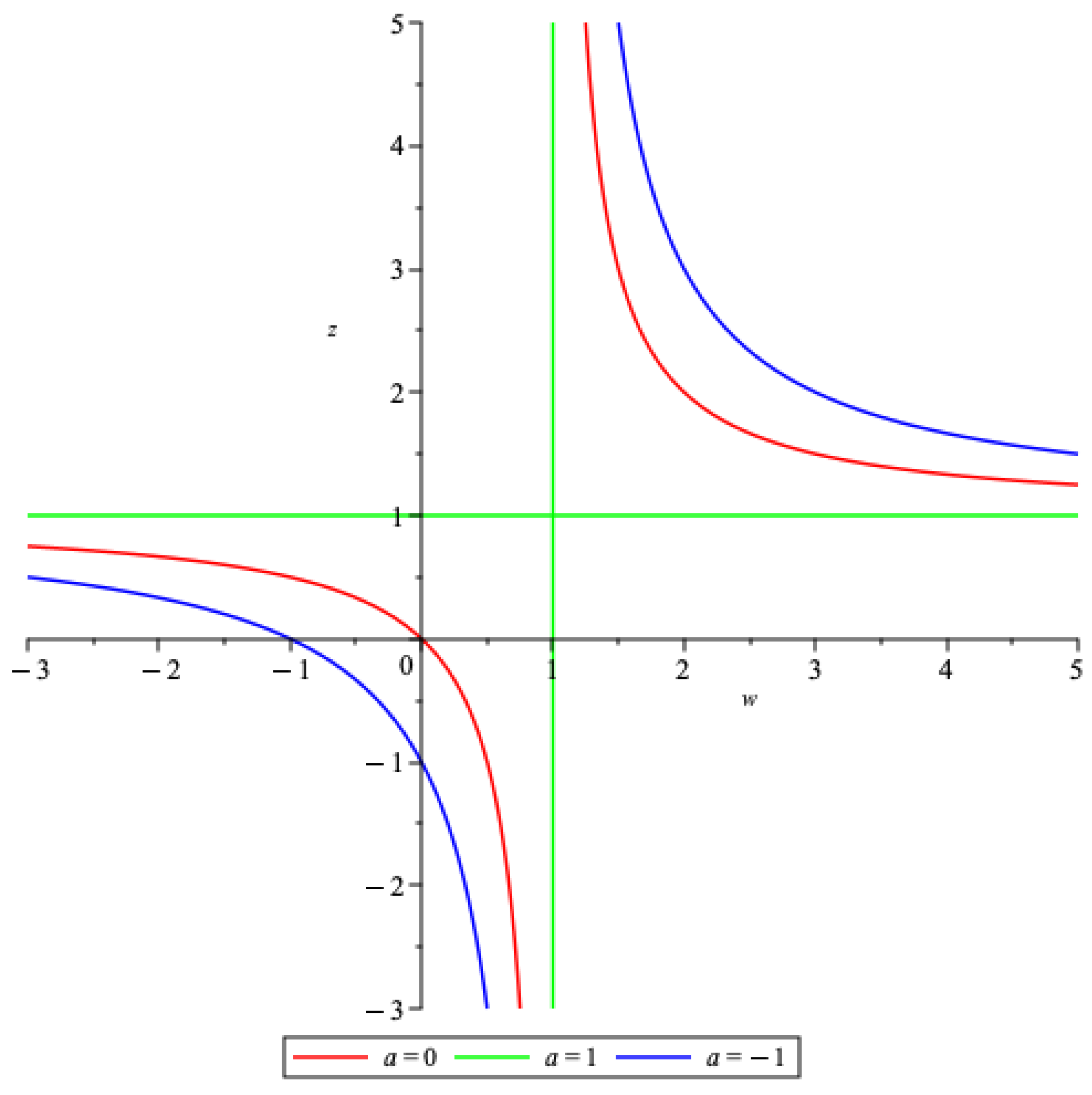
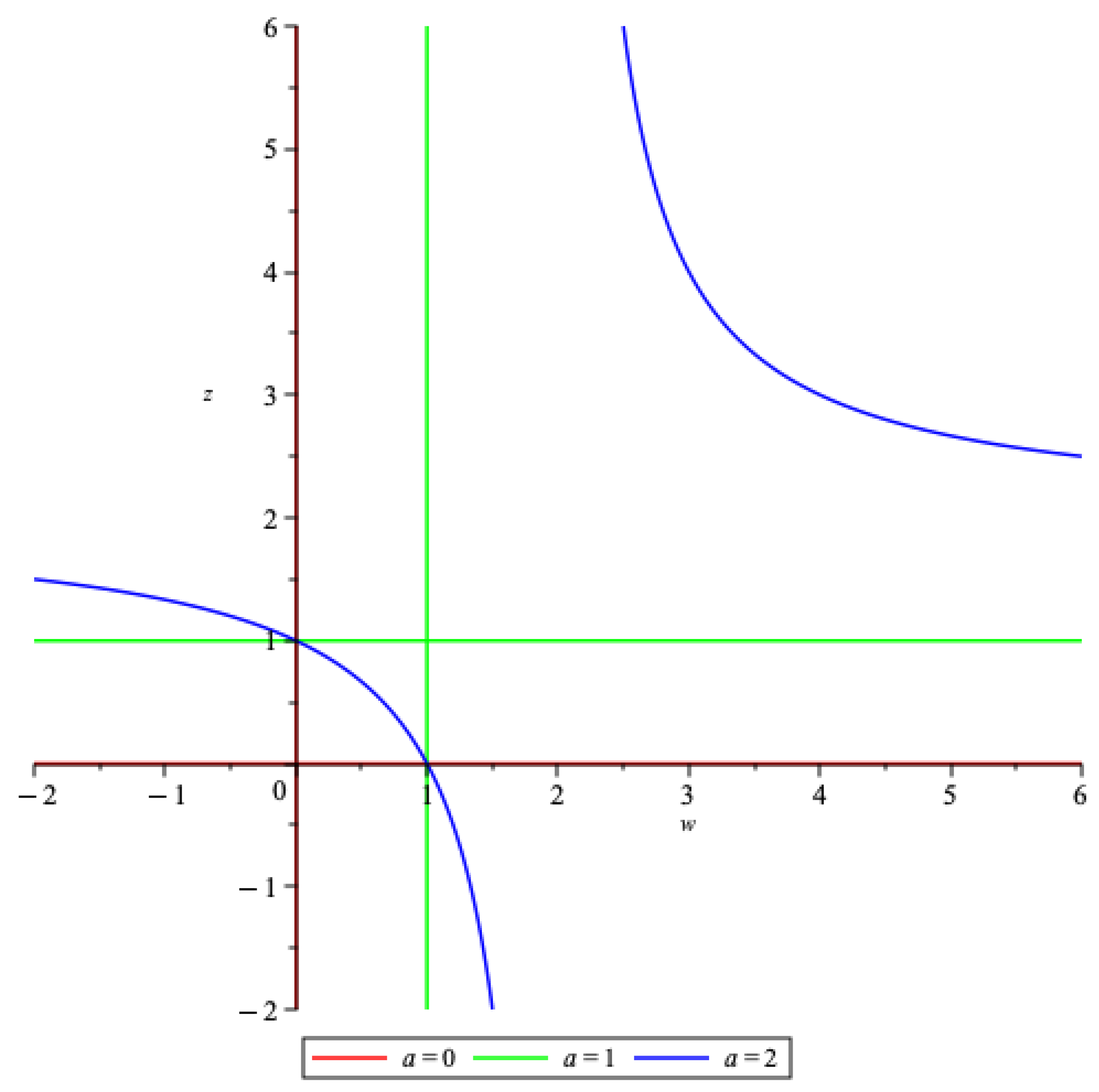
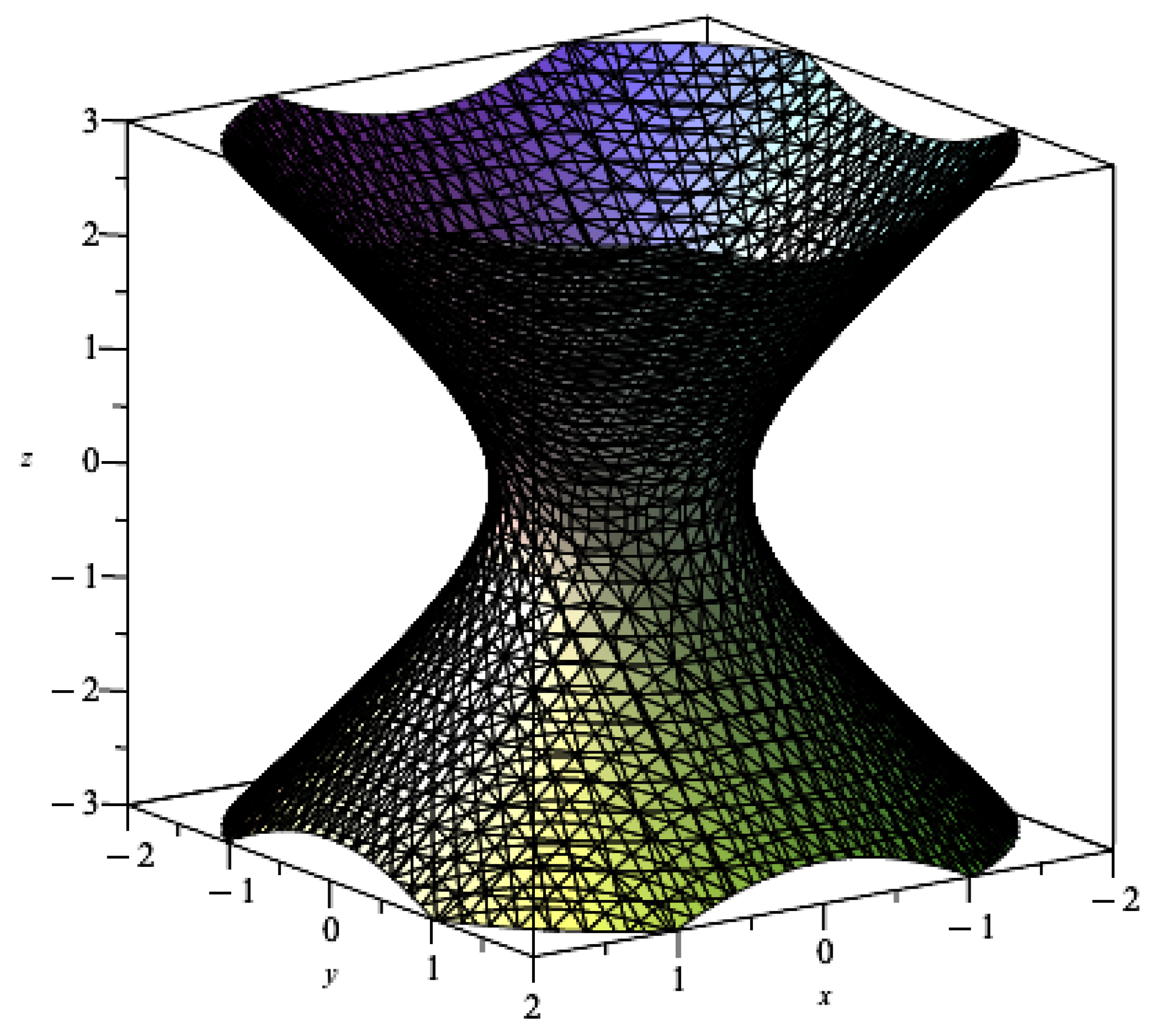
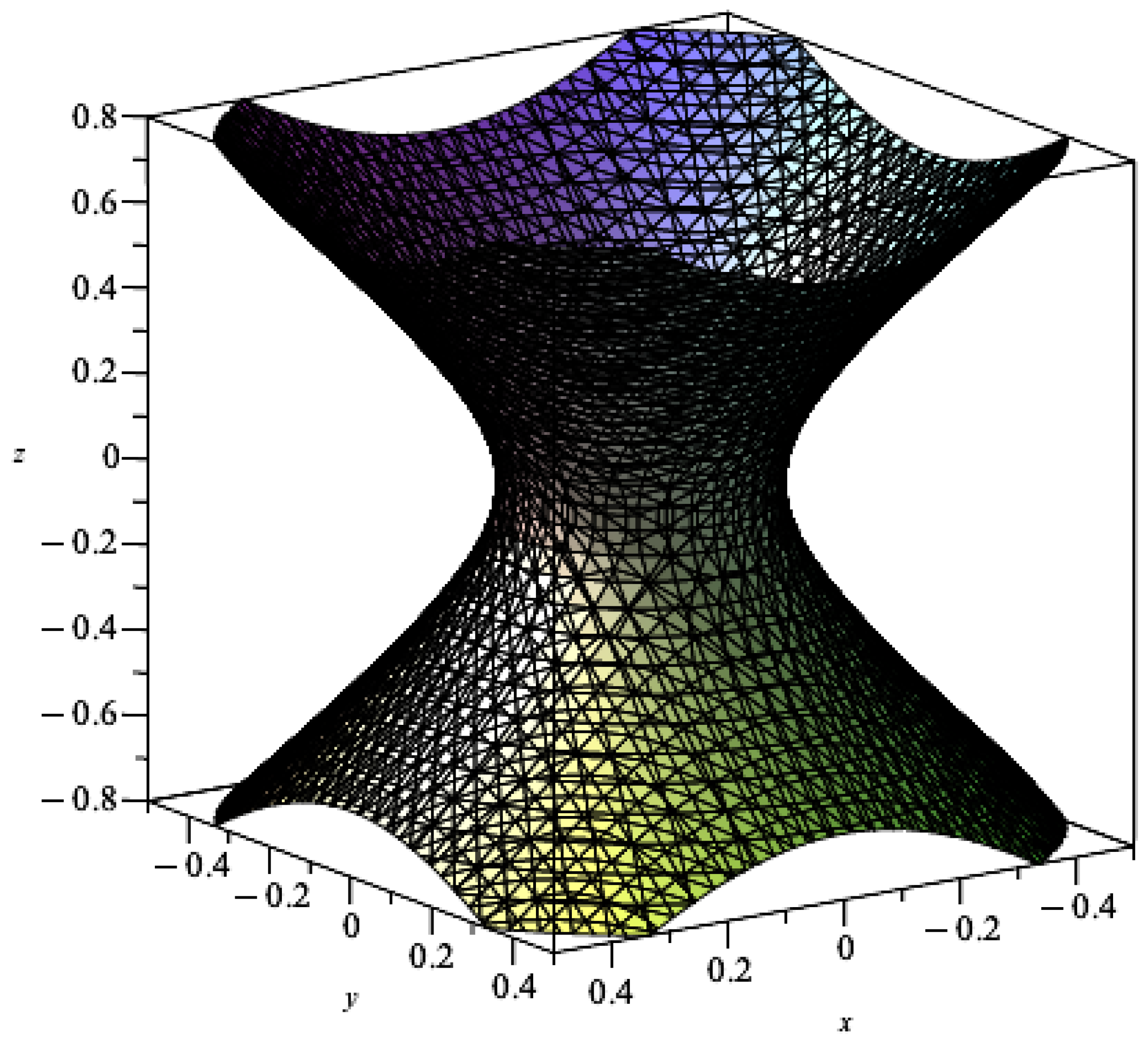
2.1. Focal Points and Prefocal Curves
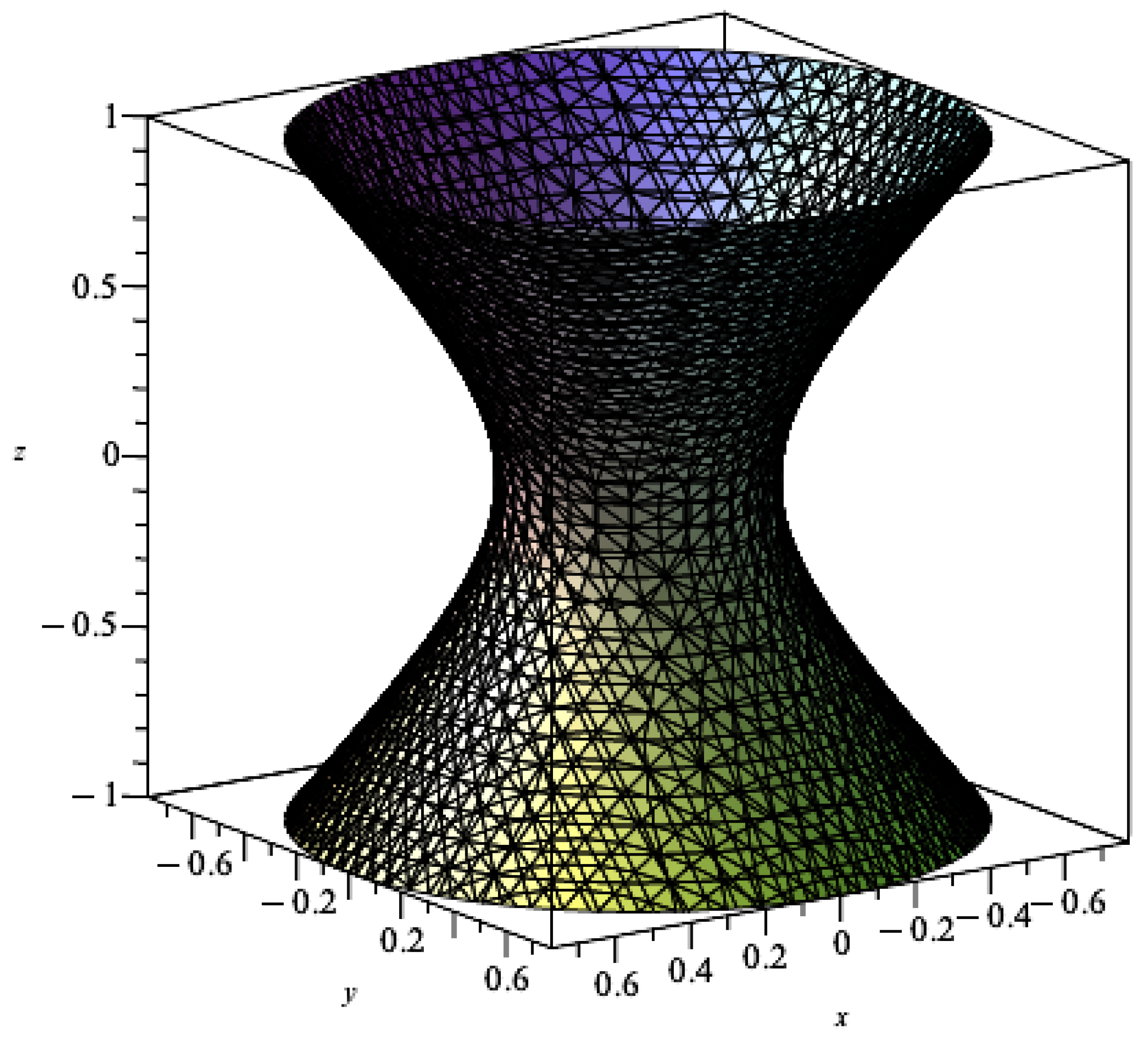
- also if ; then and replacing in (24), we obtain the surface in ,However, , so

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2.2. Inverse of Ta and Its Properties
- 1.
- ;
- 2.
- ;
- 3.
3. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Colebrook, C.F. Turbulent flows in pipes, with particular reference to the transition between the smooth and rough pipe laws. J. Inst. Civ. Eng. 1938, 11, 130. [Google Scholar] [CrossRef]
- Halley, E. A new, exact and easy method of finding the roots of equations generally and that without any previous reduction. Philos. Trans. R. Soc. Lond 1694, 18, 136–148. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice Hall: New York, NY, USA, 1964. [Google Scholar]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint Methods for the Solution of Nonlinear Equations; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Steffensen, J.F. Remarks on iteration. Scand. Actuar. J. 1933, 1, 64–72. [Google Scholar] [CrossRef]
- Kurchatov, V.A. On a method of linear interpolation for thew solution of functional equations (Russian). In Doklady Akademii Nauk; Russian Academy of Sciences: Moscow, Russia, 1971; Volume 198, pp. 524–526. [Google Scholar]
- Campos, B.; Cordero, A.; Torregrosa, J.R.; Vindel, P. Dynamical analysis of an iterative method with memory on a family of third-degree polynomials. AIMS Math. 2022, 7, 6445–6466. [Google Scholar] [CrossRef]
- Ren, H.; Wu, Q.; Bi, W. A class of two-step Steffensen type methods with fourth-order convergence. Appl. Math. Comput. 2009, 209, 206–210. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. An efficient derivative-free iterative method for solving systems of nonlinear equations. Appl. Anal. Discret. Math. 2013, 7, 390–403. [Google Scholar] [CrossRef]
- Neta, B. Basin attractors for derivative-free methods to find simple roots of nonlinear equations. J. Numer. Anal. Approx. Theory 2020, 49, 177–189. [Google Scholar] [CrossRef]
- Neta, B. Comparison of several numerical solvers for a discretized nonlinear diffusion model with source terms. Georgian Math. J. 2023. Accepted for Publication. [Google Scholar] [CrossRef]
- Kung, H.T.; Traub, J.F. Optimal orderof one-point and multipoint iteration. J. Assoc. Comput. Math. 1974, 21, 634–651. [Google Scholar] [CrossRef]
- Zhanlav, T.; Otgondorj, K. Comparison of some optimal derivative-free three-point iterations. J. Numer. Anal. Approx. Theory 2020, 49, 76–90. [Google Scholar] [CrossRef]
- Garijo, A.; Jarque, X. Global dynamics of the real secant method. Nonlinearity 2019, 32, 4557–4578. [Google Scholar] [CrossRef]
- Stewart, J. Calculus, Early Transcendentals; Brooks/Cole: Pacific Grove, CA, USA, 1995. [Google Scholar]
- Stewart, B.D. Attractor Basins of Various Root-Finding Methods. Master’s Thesis, Naval Postgraduate School, Department of Applied Mathematics, Monterey, CA, USA, 2001. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neta, B. Analysis of Traub’s Method for Cubic Polynomials. Axioms 2024, 13, 87. https://doi.org/10.3390/axioms13020087
Neta B. Analysis of Traub’s Method for Cubic Polynomials. Axioms. 2024; 13(2):87. https://doi.org/10.3390/axioms13020087
Chicago/Turabian StyleNeta, Beny. 2024. "Analysis of Traub’s Method for Cubic Polynomials" Axioms 13, no. 2: 87. https://doi.org/10.3390/axioms13020087
APA StyleNeta, B. (2024). Analysis of Traub’s Method for Cubic Polynomials. Axioms, 13(2), 87. https://doi.org/10.3390/axioms13020087