
A Note on the Time-Fractional Navier–Stokes Equation and the Double Sumudu-Generalized Laplace Transform Decomposition Method


Abstract
1. Introduction
2. Basic Definitions of Fractional Derivatives and Sumudu-Generalized Laplace Transforms
3. Main Results
3.1. Analysis of the Sumudu-Generalized Laplace Decomposition Method
3.2. Analysis of the Double Sumudu-Generalized Laplace Transforms Decomposition Method
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dyyak, I.I.; Rubino, B.; Savula, Y.; Styahar, A.O. Numerical analysis of heterogeneous mathematical model of elastic body with thin inclusion by combined BEM and FEM. Math. Model. Comput. 2019, 6, 239–250. [Google Scholar] [CrossRef]
- Grigorenko, Y.M.; Savula, Y.G.; Mukha, I.S. Linear and nonlinear problems on the Elastic Deformation of Complex Shells and Methods of Their Numerical Solution. Int. Appl. Mech. 2000, 36, 979–1000. [Google Scholar] [CrossRef]
- Shymanskyi, V.; Sokolovskyy, I.; Sokolovskyy, Y.; Bubnyak, T. Variational method for solving the time-fractal heat conduction problem in the Claydite-Block construction. In Lecture Notes on Data Engineering and Communications Technologies, Proceedings of the Advances in Computer Science for Engineering and Education, ICCSEEA 2022, Kyiv, Ukraine, 21–22 February 2022; Springer: Cham, Switzerland, 2022; Volume 134. [Google Scholar]
- Chaurasia, V.; Kumar, D. Applications of Sumudu Transform in the Time-Fractional Navier-Stokes Equation with MHD Flow in Porous Media. J. Appl. Sci. Res. 2010, 6, 1814–1821. [Google Scholar]
- El-Shahed, M.; Salem, A. On the Generalized Navier-Stokes Equations. Appl. Math. Comp. 2005, 156, 287–293. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, J.; Kumar, S. A Fractional Model of Navier-Stokes Equation Arising in Unsteady Flow of a Viscous Fluid. J. Assoc. Arab. Univ. Basic Appl. Sci. 2015, 17, 14–19. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, D.; Abbasbandy, S.; Rashidi, M.M. Analytical Solution of Fractional Navier-Stokes Equation by using Modified Laplace Decomposition Method. Ain Shams Eng. J. 2014, 5, 569–574. [Google Scholar] [CrossRef]
- Liao, S. On the Homotopy Analysis Method for Nonlinear Problems. Appl. Math. Comput. 2004, 147, 499–513. [Google Scholar] [CrossRef]
- Momani, S.; Odibat, Z. Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Appl. Math. Comput. 2006, 177, 488–494. [Google Scholar] [CrossRef]
- Prakash, A.; Prakasha, D.G.; Veeresha, P. A reliable algorithm for time-fractional Navier–Stokes equations via Laplace transform. Nonlinear Eng. 2019, 8, 695–701. [Google Scholar] [CrossRef]
- Maitama, S. Analytical Solution of Time-Fractional Navier-Stokes Equation by Natural Homotopy Perturbation Method. Progr. Fract. Differ. Appl. 2018, 4, 123–131. [Google Scholar] [CrossRef]
- Wang, K.; Liu, S. Analytical study of time-fractional Navier-Stokes equations by transform methods. Adv. Differ. Equ. 2016, 2016, 61. [Google Scholar] [CrossRef]
- Ahmed, Z.; Idreesb, M.I.; Belgacemc, F.B.M.; Perveen, Z. On the convergence of double Sumudu transform. J. Nonlinear Sci. Appl. 2019, 13, 154–162. [Google Scholar] [CrossRef]
- Kadhem, H.S.; Hasan, S.Q. Numerical double Sumudu transform for nonlinear mixed fractional partial differential equations. J. Phys. Conf. Ser. 2019, 1279, 012048. [Google Scholar] [CrossRef]
- Eltayeb, H. Application of Double Sumudu-Generalized Laplace Decomposition Method for Solving 2+1-Pseudoparabolic Equation. Axioms 2023, 12, 799. [Google Scholar] [CrossRef]
- Eltayeb, H. Application of the Double Sumudu-Generalized Laplace Transform Decomposition Method to Solve Singular Pseudo-Hyperbolic Equations. Symmetry 2023, 15, 1706. [Google Scholar] [CrossRef]
- Ghandehari, M.A.M.; Ranjbar, M. A numerical method for solving a fractional partial differential equation through converting it into an NLP problem. Comput. Math. Appl. 2013, 65, 975–982. [Google Scholar] [CrossRef]
- Bayrak, M.A.; Demir, A. A new approach for space-time fractional partial differential equations by residual power series method. Appl. Math. Comput. 2018, 336, 215–230. [Google Scholar]
- Hayman, T.; Subhash, K. Analytical solutions for conformable space-time fractional partial differential equations via fractional differential transform. Chaos Solitons Fractals 2018, 109, 238–245. [Google Scholar]
- Eltayeb, H.; Alhefthi, R.K. Solution of Fractional Third-Order Dispersive Partial Differential Equations and Symmetric KdV via Sumudu–Generalized Laplace Transform Decomposition. Symmetry 2023, 15, 1540. [Google Scholar] [CrossRef]
- Mahmood, S.; Shah, R.; Khan, H.; Arif, M. Laplace Adomian Decomposition Method for Multi Dimensional Time Fractional Model of Navier-Stokes Equation. Symmetry 2019, 11, 149. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, P. FRDTM for numerical simulation of multi-dimensional, time-fractional model of Navier-Stokes equation. Ain Shams Eng. J. 2016, 9, 827–834. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
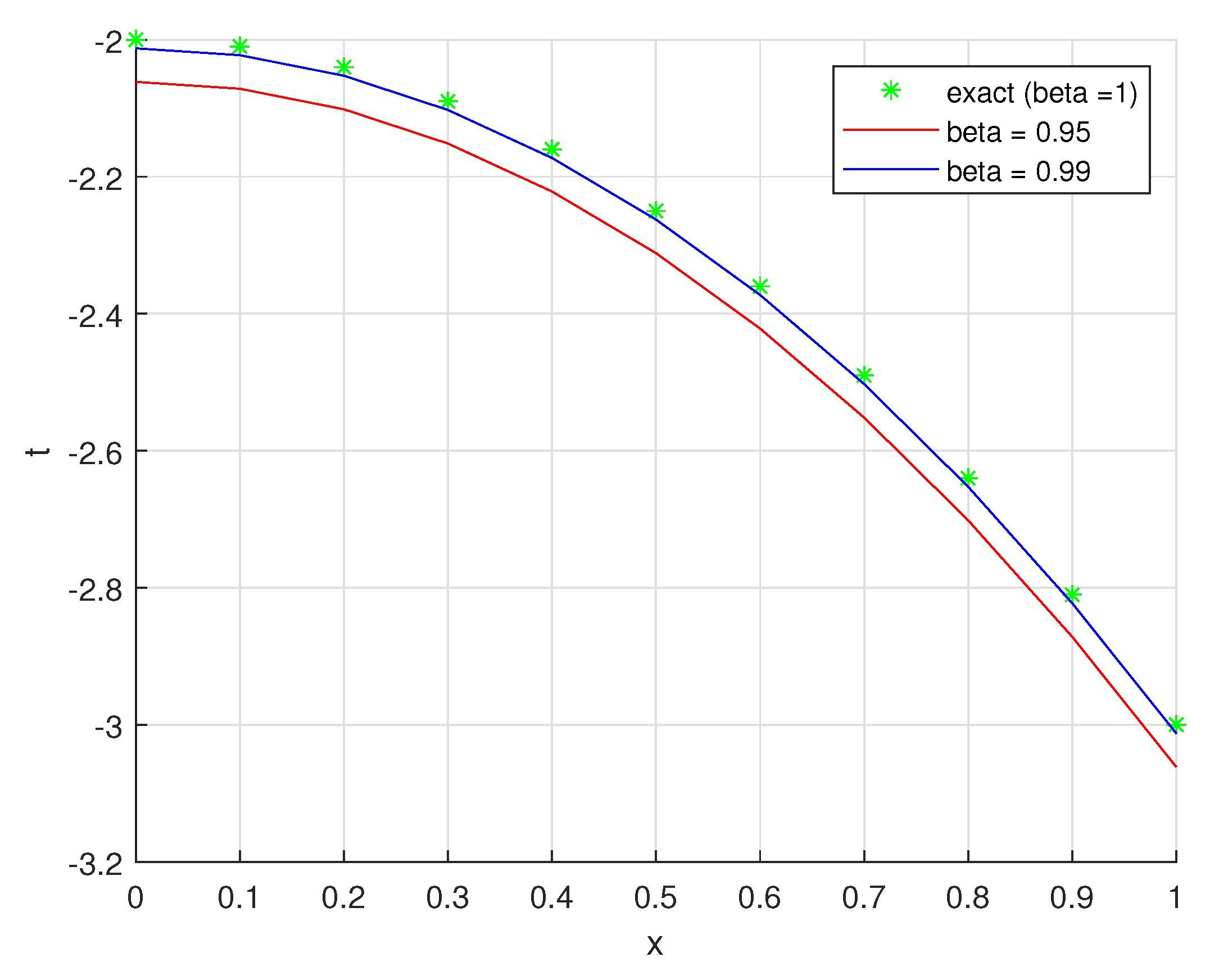
| Exact | The Method | Error | The Method | Error |
|---|---|---|---|---|
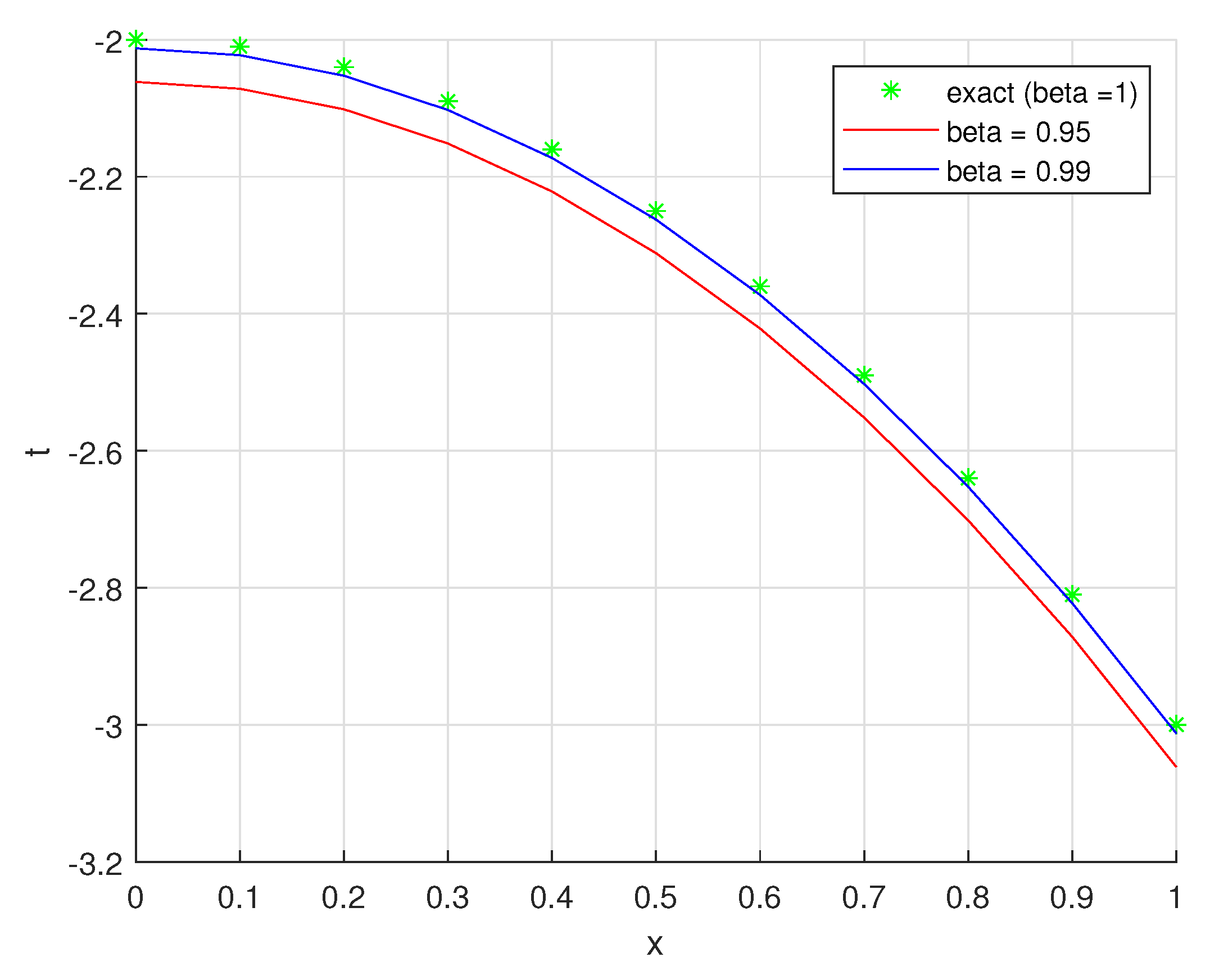
| −2.0000 | −2.0616 | 0.0616 | −2.0126 | 0.0126 |
| −2.0100 | −2.0716 | 0.0616 | −2.0226 | 0.0126 |
| −2.0400 | −2.1016 | 0.0616 | −2.0526 | 0.0126 |
| −2.0900 | −2.1516 | 0.0616 | −2.1026 | 0.0126 |
| −2.1600 | −2.2216 | 0.0616 | −2.1726 | 0.0126 |
| −2.2500 | −2.3116 | 0.0616 | −2.2626 | 0.0126 |
| −2.3600 | −2.4216 | 0.0616 | −2.3726 | 0.0126 |
| −2.4900 | −2.5516 | 0.0616 | −2.5026 | 0.0126 |
| −2.6400 | −2.7016 | 0.0616 | −2.6526 | 0.0126 |
| −2.8100 | −2.8716 | 0.0616 | −2.8226 | 0.0126 |
| −3.0000 | −3.0616 | 0.0616 | −3.0126 | 0.0126 |
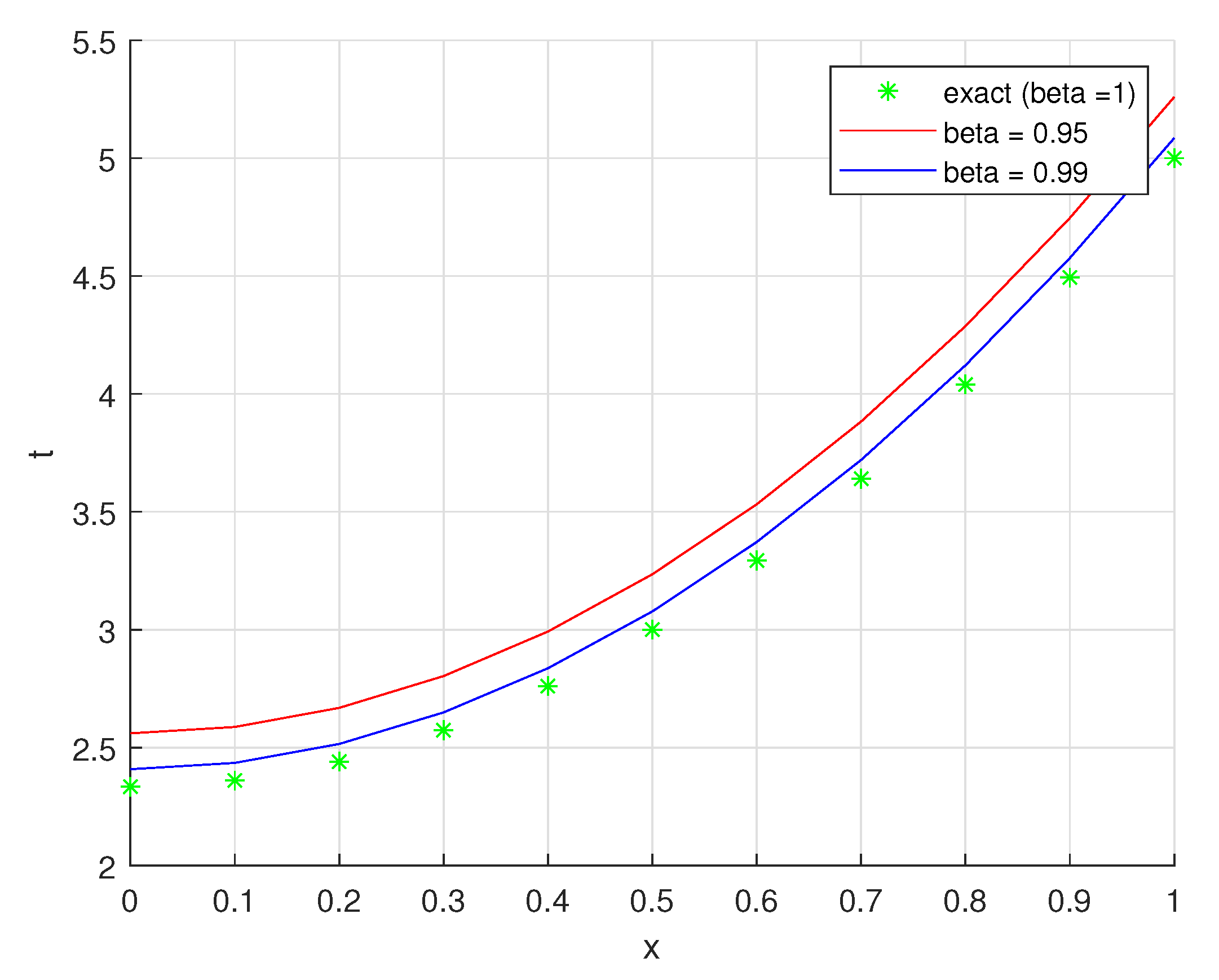
| Exact | The Method | Error | The Method | Error |
|---|---|---|---|---|
| 2.3333 | 2.5599 | 0.2266 | 2.4077 | 0.0744 |
| 2.3600 | 2.5869 | 0.2269 | 2.4345 | 0.0745 |
| 2.4400 | 2.6679 | 0.2279 | 2.5148 | 0.0748 |
| 2.5733 | 2.8029 | 0.2295 | 2.6487 | 0.0754 |
| 2.7600 | 2.9918 | 0.2318 | 2.8361 | 0.0761 |
| 3.0000 | 3.2348 | 0.2348 | 3.0771 | 0.0771 |
| 3.2933 | 3.5317 | 0.2384 | 3.3716 | 0.0783 |
| 3.6400 | 3.8827 | 0.2427 | 3.7197 | 0.0797 |
| 4.0400 | 4.2876 | 0.2476 | 4.1214 | 0.0814 |
| 4.4933 | 4.7465 | 0.2532 | 4.5766 | 0.0832 |
| 5.0000 | 5.2594 | 0.2594 | 5.0853 | 0.0853 |
| Exact | The Method | Error | The Method | Error |
|---|---|---|---|---|
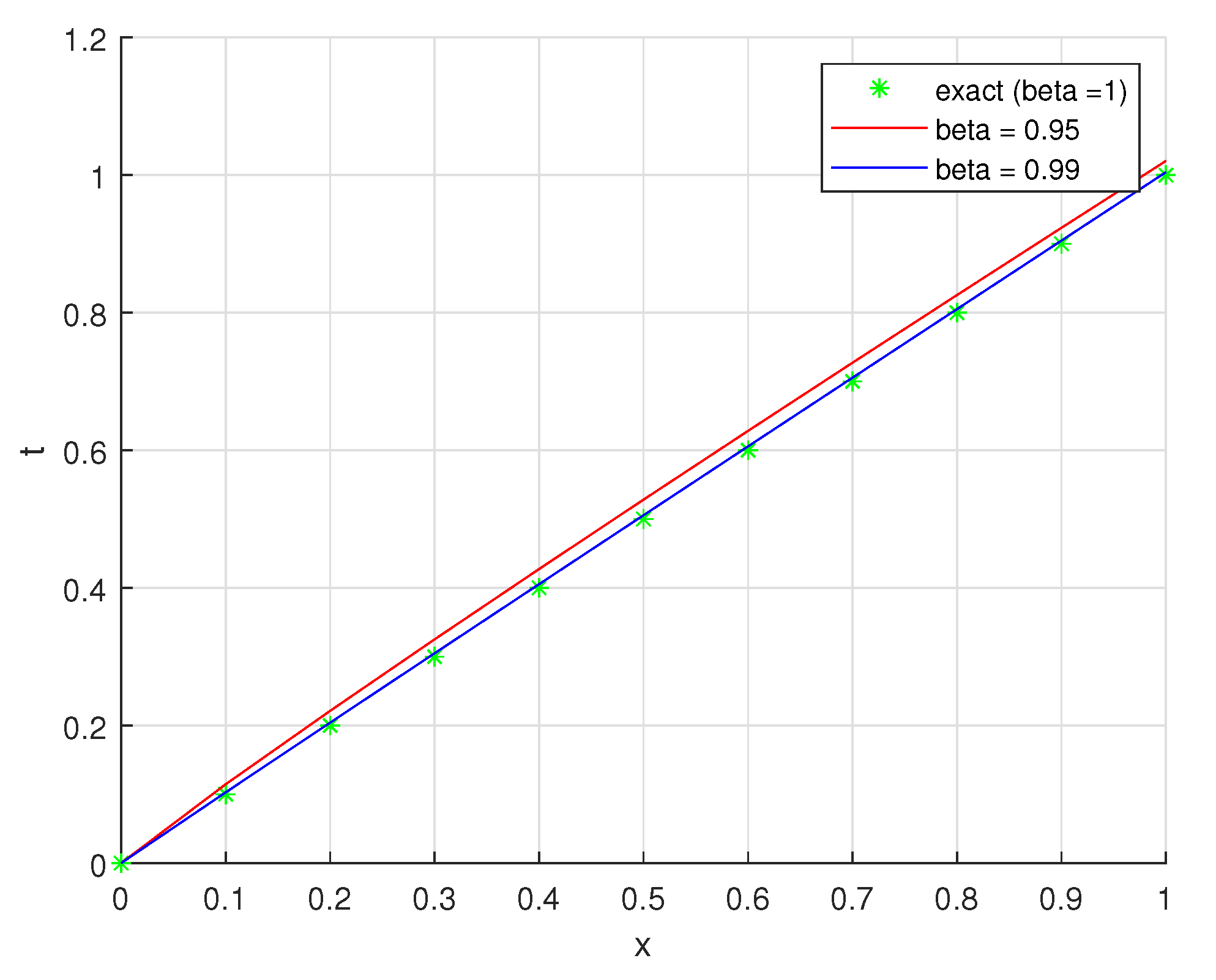
| 0 | 0 | 0 | 0 | 0 |
| 0.1000 | 0.1145 | 0.0145 | 0.1028 | 0.0028 |
| 0.2000 | 0.2212 | 0.0212 | 0.2041 | 0.0041 |
| 0.3000 | 0.3252 | 0.0252 | 0.3049 | 0.0049 |
| 0.4000 | 0.4274 | 0.0274 | 0.4054 | 0.0054 |
| 0.5000 | 0.5283 | 0.0283 | 0.5056 | 0.0056 |
| 0.6000 | 0.6282 | 0.0282 | 0.6056 | 0.0056 |
| 0.7000 | 0.7272 | 0.0272 | 0.7055 | 0.0055 |
| 0.8000 | 0.8256 | 0.0256 | 0.8052 | 0.0052 |
| 0.9000 | 0.9233 | 0.0233 | 0.9047 | 0.0047 |
| 1.0000 | 1.0205 | 0.0205 | 1.0042 | 0.0042 |
| Exact | The Method | Error | The Method | Error |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 |
| 0.1000 | 0.1145 | 0.0145 | 0.1028 | 0.0028 |
| 0.2000 | 0.2212 | 0.0212 | 0.2041 | 0.0041 |
| 0.3000 | 0.3252 | 0.0252 | 0.3049 | 0.0049 |
| 0.4000 | 0.4274 | 0.0274 | 0.4054 | 0.0054 |
| 0.5000 | 0.5283 | 0.0283 | 0.5056 | 0.0056 |
| 0.6000 | 0.6282 | 0.0282 | 0.6056 | 0.0056 |
| 0.7000 | 0.7272 | 0.0272 | 0.7055 | 0.0055 |
| 0.8000 | 0.8256 | 0.0256 | 0.8052 | 0.0052 |
| 0.9000 | 0.9233 | 0.0233 | 0.9047 | 0.0047 |
| 1.0000 | 1.0205 | 0.0205 | 1.0042 | 0.0042 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eltayeb, H.; Bachar, I.; Mesloub, S. A Note on the Time-Fractional Navier–Stokes Equation and the Double Sumudu-Generalized Laplace Transform Decomposition Method. Axioms 2024, 13, 44. https://doi.org/10.3390/axioms13010044
Eltayeb H, Bachar I, Mesloub S. A Note on the Time-Fractional Navier–Stokes Equation and the Double Sumudu-Generalized Laplace Transform Decomposition Method. Axioms. 2024; 13(1):44. https://doi.org/10.3390/axioms13010044
Chicago/Turabian StyleEltayeb, Hassan, Imed Bachar, and Said Mesloub. 2024. "A Note on the Time-Fractional Navier–Stokes Equation and the Double Sumudu-Generalized Laplace Transform Decomposition Method" Axioms 13, no. 1: 44. https://doi.org/10.3390/axioms13010044
APA StyleEltayeb, H., Bachar, I., & Mesloub, S. (2024). A Note on the Time-Fractional Navier–Stokes Equation and the Double Sumudu-Generalized Laplace Transform Decomposition Method. Axioms, 13(1), 44. https://doi.org/10.3390/axioms13010044