

A Nonclassical Stefan Problem with Nonlinear Thermal Parameters of General Order and Heat Source Term


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analytic Treatment
3. Lower and Upper Bounds of the Solution y
- If then So
- If then So
- If and then and
- If and then and
4. Existence and Uniqueness of the Solution
- 1.
- There is a constant such that for
- 2.
- There are functions and , which are bounded when v varies in a bounded set and if
- 3.
- There is a continuous function φ such that as and for
- By writing the nonlinear terms of Pr. (4) in the formthe nonlinear differential equation of Pr. (4) becomeswhere Thus,Using the change of variableEquation (44) becomesHence,where Therefore,Consequently,
- The second part of this lemma follows from the first one.
- Since from the upper bounds of we haveandThus,whereforfor andfor and .Hence, for we haveandFor we haveandFor and we haveandFor and we haveandWhen v varies in a bounded set we have
Uniqueness of the Solution
5. The General Problem: Nonhomogeneous Equation
5.1. Pr. (4)–(5) with
5.2. Pr. (4) – (6) with
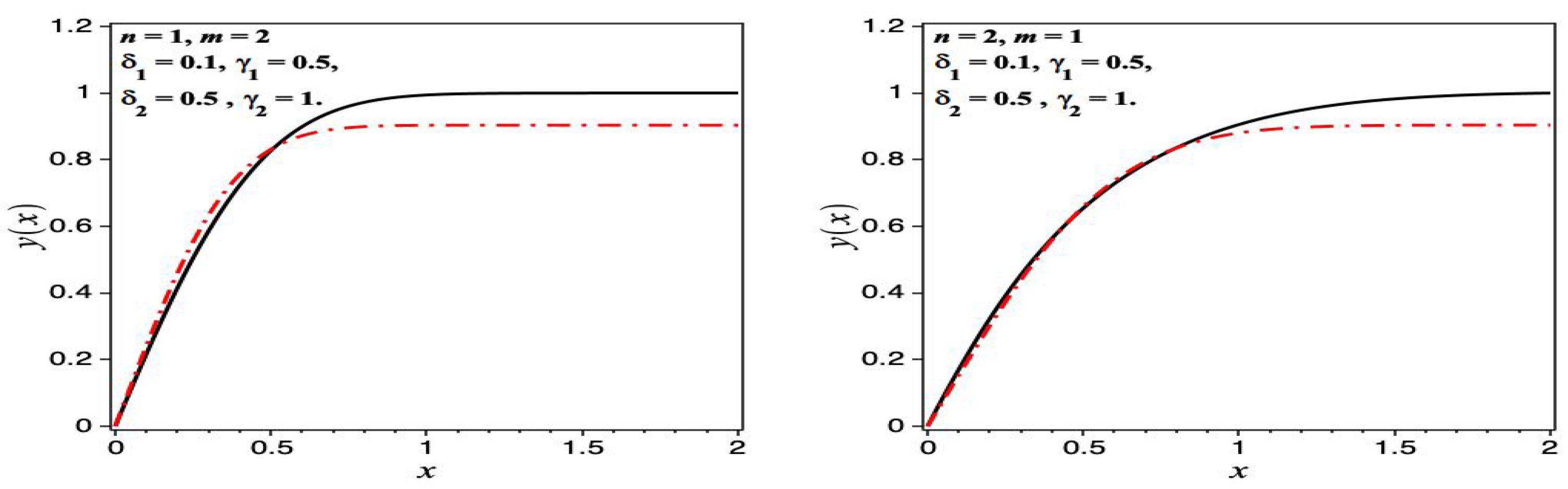
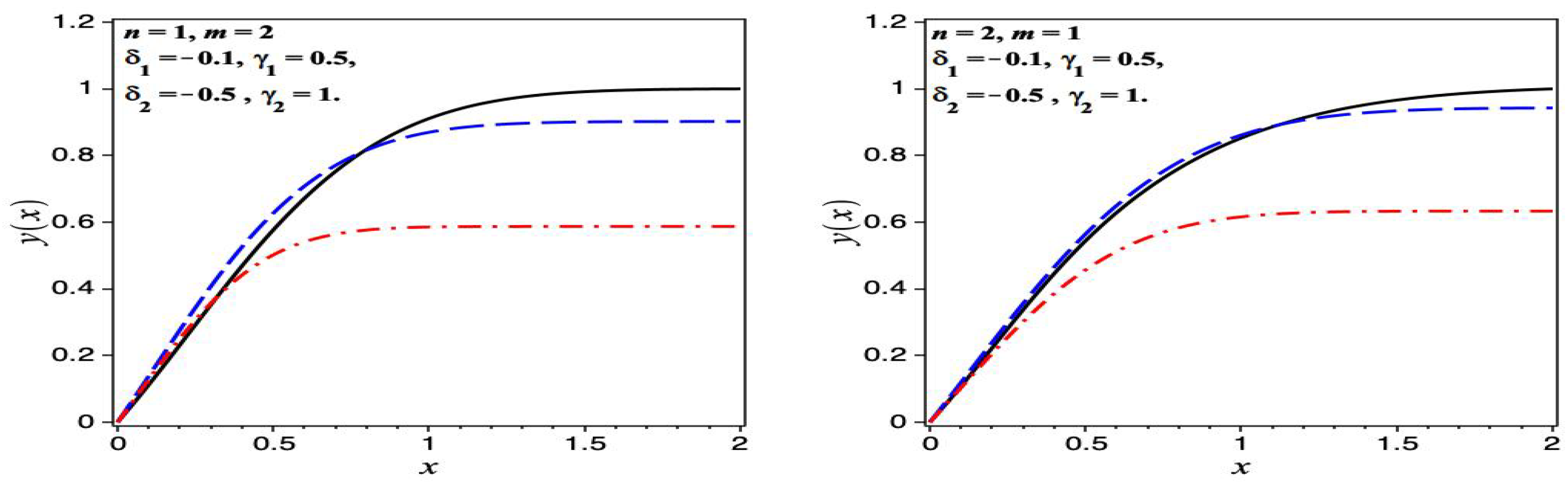
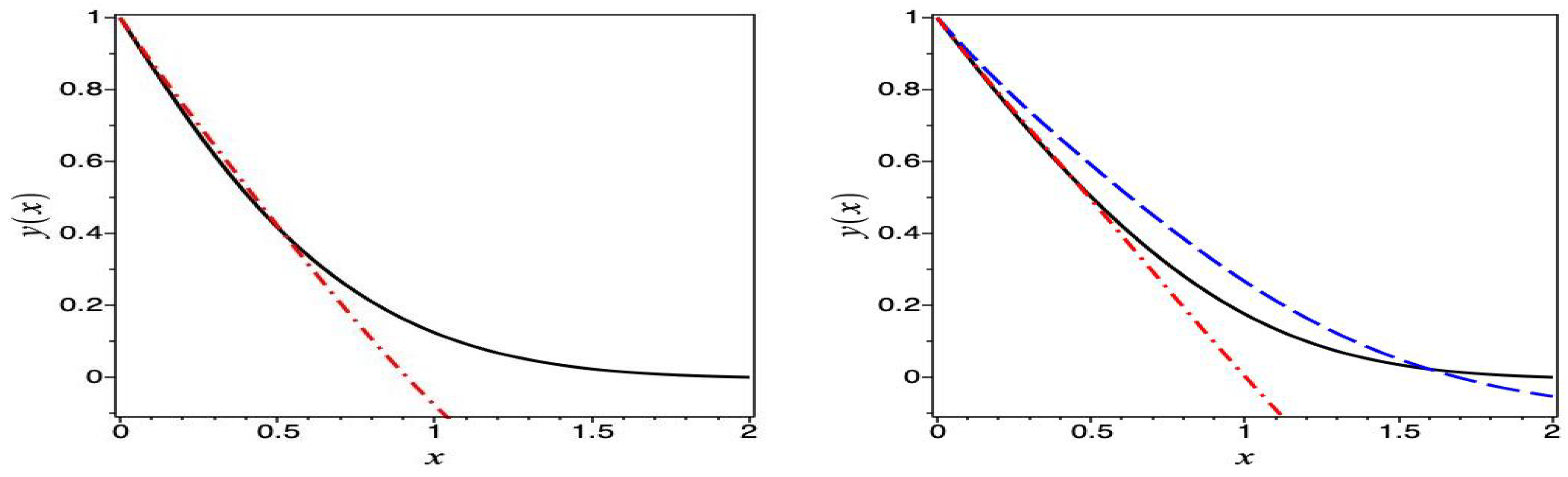
6. Numerical Results
6.1. Homogeneous Case
6.2. Nonhomogeneous Case
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cho, S.H.; Sunderland, J.E. Phase Change Problems With Temperature-Dependent Thermal Conductivity. J. Heat Transf. 1974, 96, 214–217. [Google Scholar] [CrossRef]
- Oliver, D.; Sunderland, J. A phase change problem with temperature-dependent thermal conductivity and specific heat. Int. J. Heat Mass Transf. 1987, 30, 2657–2661. [Google Scholar] [CrossRef]
- Ceretani, A.N.; Salva, N.N.; Tarzia, D.A. Existence and uniqueness of the modified error function. Appl. Math. Lett. 2017, 70, 14–17. [Google Scholar] [CrossRef]
- Bougouffa, S.; Khanfer, A.; Bougoffa, L. On the approximation of the modified error function. Math. Methods Appl. Sci. 2022, 46, 11657–11665. [Google Scholar] [CrossRef]
- Khanfer, A.; Bougoffa, L. A Stefan problem with nonlinear thermal conductivity. Math. Methods Appl. Sci. 2022, 46, 4602–4611. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Tarzia, D.A. Existence, Uniqueness and an Explicit Solution for a One-Phase Stefan Problem for a Non-classical Heat Equation, Free Boundary Problems. Int. Ser. Numer. Math. 2006, 154, 117–124. [Google Scholar]
- Bougoffa, L. A note on the existence and uniqueness solutions of the modified error function. Math. Methods Appl. Sci. 2018, 41, 5526–5534. [Google Scholar] [CrossRef]
- Bougoffa, L.; Rach, R.; Mennouni, A. On the existence, uniqueness, and new analytic approximate solution of the modified error function in two-phase Stefan problems. Math. Methods Appl. Sci. 2021, 44, 10948–10956. [Google Scholar] [CrossRef]
- Zhou, Y.; Xia, L.-J. Exact solution for Stefan problem with general power-type latent heat using Kummer function. Int. J. Heat Mass Transf. 2015, 84, 114–118. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, A.K.; Rajeev. A moving boundary problem with variable specific heat and thermal conductivity. J. King Saud Univ.-Sci. 2020, 32, 384–389. [Google Scholar] [CrossRef]
- Chen, X.; Lou, B.; Zhou, M.; Giletti, T. Long time behavior of solutions of a reaction-diffusion equation on unbounded intervals with Robin boundary conditions. Ann. Inst. H. Poincare Anal. non lin. 2016, 33, 67–92. [Google Scholar] [CrossRef]
- Ribera, H.; Myers, T.G. A mathematical model for nanoparticle melting with size-dependent latent heat and melt temperature. Microfluid. Nanofluidics 2016, 20, 147. [Google Scholar] [CrossRef]
- Font, F.; Myers, T.G.; Mitchell, S.L. A mathematical model for nanoparticle melting with density change. Microfluid. Nanofluid. 2015, 18, 233–243. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Natale, M.F. One-phase Stefan problem with temperature-dependent thermal conductivity and a boundary condition of Robin type. J. Appl. Anal. 2015, 21, 89–97. [Google Scholar] [CrossRef]
- Bougoffa, L.; Khanfer, A. On the solutions of a phase change problem with temperature-dependent thermal conductivity and specific heat. Results Phys. 2020, 19, 103646. [Google Scholar] [CrossRef]
- Voller, V.; Swenson, J.; Paola, C. An analytical solution for a Stefan problem with variable latent heat. Int. J. Heat Mass Transf. 2004, 47, 5387–5390. [Google Scholar] [CrossRef]
- Beasley, J.D. Thermal conductivities of some novel nonlinear optical materials. Appl. Opt. 1994, 33, 1000–1003. [Google Scholar] [CrossRef]
- Aggarwal, R.L.; Fan, T.Y. Thermal diffusivity, specific heat, thermal conductivity, coefficient of thermal expansion, and refractive-index change with temperature in AgGaSe2. Appl. Opt. 2005, 44, 2673–2677. [Google Scholar] [CrossRef]
- Henager, C.H.; Pawlewicz, W.T. Thermal conductivities of thin, sputtered optical films. Appl. Opt. 1993, 32, 91. [Google Scholar] [CrossRef]
- de Azevedo, A.M.; dos Santos Magalhães, E.; da Silva, R.G.D. A comparison between nonlinear and constant thermal properties approaches to estimate the temperature in LASER welding simulation. Case Stud. Therm. Eng. 2022, 35, 102135. [Google Scholar] [CrossRef]
- Xiao, Y.; Wu, H. An explicit coupled method of FEM and meshless particle method for simulating transient heat transfer process of friction stir welding. Math. Probl Eng. 2020, 2020, 2574127. [Google Scholar] [CrossRef]
- Brizes, E.; Jaskowiak, J.; Abke, T.; Ghassemi-Armaki, H.; Ramirez, A.J. Evaluation of heat transfer within numerical models of resistance spot welding using high-speed thermography. J. Mater. Process. Technol. 1985, 297, 117276. [Google Scholar] [CrossRef]
- Gladkov, S.O.; Bogdanova, S.B. On the theory of nonlinear thermal conductivity. Tech. Phys. 2016, 61, 157–164. [Google Scholar] [CrossRef]
- Sahoo, R.; Sarangi, S. Effect of temperature-dependent specific heat of the working fluid on the performance of cryogenic regenerators. Cryogenics 1985, 25, 583–590. [Google Scholar] [CrossRef]
- Tomeczek, J.; Palugniok, H. Specific heat capacity and enthalpy of coal pyrolysis at elevated temperatures. Fuel 1996, 75, 1089–1093. [Google Scholar] [CrossRef]
- Saxena, S.K. Earth mineralogical model: Gibbs free energy minimization computation in the system MgO-FeO-SiO2. Geochim. Cosmochim. Acta 1996, 60, 2379–2395. [Google Scholar] [CrossRef]
- Merrick, D. Mathematical models of the thermal decomposition of coal: 2. Specific heats and heats of reaction. Fuel 1983, 62, 540–546. [Google Scholar] [CrossRef]
- Hanrot, F.; Ablitzer, D.; Houzelot, J.; Dirand, M. Experimental measurement of the true specific heat capacity of coal and semicoke during carbonization. Fuel 1994, 73, 305–309. [Google Scholar] [CrossRef]
- Haemmerich, D.; dos Santos, I.; Schutt, D.J.; Webster, J.G.; Mahvi, D.M. In vitro measurements of temperature-dependent specific heat of liver tissue. Med. Eng. Phys. 2006, 28, 194–197. [Google Scholar] [CrossRef]
- Ghosh, A.; McSween, H.Y. Temperature dependence of specific heat capacity and its effect on asteroid thermal models. Mefeorifrcs Planet. Sci. 1999, 34, 121–127. [Google Scholar] [CrossRef]
- Scott, E.P. An Analytical Solution and Sensitivity Study of Sublimation-Dehydration Within a Porous Medium With Volumetric Heating. J. Heat Transf. 1994, 116, 686–693. [Google Scholar] [CrossRef]
- Menaldi, J.L.; Tarzia, D.A. Generalized Lamé–Clapeyron solution for a one-phase source Stefan problem. Comput. Appl. Math. 1993, 12, 123–142. [Google Scholar]
- Briozzo, A.C.; Natale, M.F.; Tarzia, D.A. Explicit solutions for a two-phase unidimensional Lamé–Clapeyron–Stefan problem with source terms in both phases. J. Math. Anal. Appl. 2007, 329, 145–162. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Tarzia, D.A. A Stefan problem for a non-classical heat equation with a convective condition. Appl. Math. Comput. 2010, 217, 4051–4060. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Tarzia, D.A. Exact Solutions for Nonclassical Stefan Problems. Int. J. Differ. Equ. 2010, 2010, 868059. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Natale, M.F. Two Stefan problems for a non-classical heat equation with nonlinear thermal coefficients. Differ. Integral Equ. 2014, 27, 1187–1202. [Google Scholar] [CrossRef]
- Briozzo, A.C.; Natale, M.F. Non-classical Stefan problem with nonlinear thermal coefficients and a Robin boundary condition. Nonlinear Anal. Real World Appl. 2019, 49, 159–168. [Google Scholar] [CrossRef]
- Bollati, J.; Natale, M.F.; Semitiel, J.A.; Tarzia, D.A. Exact solution for non-classical one-phase Stefan problem with variable thermal coefficients and two different heat source terms. Comput. Appl. Math. 2022, 41, 375. [Google Scholar] [CrossRef]
- Bougoffa, L.; Bougouffa, S.; Khanfer, A. An Analysis of the One-Phase Stefan Problem with Variable Thermal Coefficients of Order p. Axioms 2023, 12, 497. [Google Scholar] [CrossRef]
- Willett, D. Uniqueness for second order nonlinear boundary value problems with applications to almost periodic solutions. Ann. Mat. Pura Appl. 1969, 81, 77–92. [Google Scholar] [CrossRef]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Hamming, R. Numerical Methods for Scientists and Engineers; Courier Corporation: Chelmsford, MA, USA, 1987. [Google Scholar]
- Ascher, U.; Petzold, L. Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Bougoffa, L.; Bougouffa, S.; Khanfer, A. Generalized Thomas-Fermi equation: Existence, uniqueness, and analytic approximation solutions. AIMS Math. 2023, 8, 10529–10546. [Google Scholar] [CrossRef]
- Khanfer, A.; Bougoffa, L.; Bougouffa, S. Analytic Approximate Solution of the Extended Blasius Equation with Temperature-Dependent Viscosity. J. Nonlinear Math. Phys. 2023, 30, 287–302. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanfer, A.; Bougoffa, L.; Bougouffa, S. A Nonclassical Stefan Problem with Nonlinear Thermal Parameters of General Order and Heat Source Term. Axioms 2024, 13, 14. https://doi.org/10.3390/axioms13010014
Khanfer A, Bougoffa L, Bougouffa S. A Nonclassical Stefan Problem with Nonlinear Thermal Parameters of General Order and Heat Source Term. Axioms. 2024; 13(1):14. https://doi.org/10.3390/axioms13010014
Chicago/Turabian StyleKhanfer, Ammar, Lazhar Bougoffa, and Smail Bougouffa. 2024. "A Nonclassical Stefan Problem with Nonlinear Thermal Parameters of General Order and Heat Source Term" Axioms 13, no. 1: 14. https://doi.org/10.3390/axioms13010014
APA StyleKhanfer, A., Bougoffa, L., & Bougouffa, S. (2024). A Nonclassical Stefan Problem with Nonlinear Thermal Parameters of General Order and Heat Source Term. Axioms, 13(1), 14. https://doi.org/10.3390/axioms13010014