

The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- where c is a constant.
- .
- .
- Discrete Leibniz integral law:
- Caputo fractional difference of a constant x:
3. The Discrete Fractional-Order FitzHugh–Nagumo Reaction–Diffusion System
4. Local Stability
4.1. Local Stability of the Free Diffusions System
- If , the equilibrium point is locally asymptotically stable.
- If the equilibrium points and are locally asymptotically stable.
- If , the equilibrium points and are locally asymptotically stable, and is stable if the following hold true:
- Given that the origin always represents an equilibrium point, we shall investigate the stability of the system (21) regardless of the sign of .The Jacobian matrix of the equilibrium point may be expressed as follows:The Jacobian matrix has the following characteristic equation:whereThis might lead to the following discriminantThe solutions of (26) are obviously dependent on the sing of ; therefore, we may analyze the stability in the following situations.
- -
- If , and since , the negativity of the eigenvalues is determined by the sign of . Furthermore, as , and the eigenvalues and are real, thus we haveAs a consequence of this, . It is self-evident that As a result, according to Theorem 3, the equilibrium is asymptotically stable.
- -
- If , thenSince , the system (21) is then asymptotically stable, based on the identical situation studied before.
- -
- If , cannot be equal to zero. The sign of the eigenvalues is the same as the sign of . As a result, is asymptotically stable for all .
We may deduce that the origin is locally asymptotically stable, regardless of the sing of - Now, assuming that , and the origin is clearly stable according to the previous investigations, we can thus investigate the stability of the equilibrium point .In this case, we have the Jacobian matrix of the equilibrium point defined byand we also have:This may lead us to the discriminant of the eigenvalue problem (26):We notice that and , which indicates that, based on the results we have reached about the stability of the equilibrium point, , is asymptotically stable.
- In the last case, we suppose that ; thus, the equilibrium point remains stable, and we will discuss the stability of the two other equilibriums.
- -
- Concering the equilibrium we haveThis leads us to:The discriminant of the eingenvalue problem (26) is as follows:This case is identical to the case of the equilibrium point , since and , which leads us to the same results as the first and second cases of the demonstration. As a result, is locally asymptotically stable.
- -
- Finally, we investigate the stability of the equilibrium , and we haveWe might observe from the Jacobian matrix thatThe characteristic equation (26) has the following discriminantBased on (34), we investigate each case independently.
- ∗
- If and if , as a result, the eigenvalues’ negativity is dependent on the sign of , and the eigenvalues and are real and may be represented as
- ·
- If , then we haveAs a result, . Since both eigenvalues are real, it is obvious that As a consequence, based on Theorem 3, the equilibrium is asymptotically stable.
- ·
- If , then we haveTherefore, , and based on Theorem 3, system (21) is unstable.
- ∗
- If and if , thenWe may discuss the solutions based on the sign of .
- ∗
- If , and , cannot be equal to zero. The sign of the eigenvalues is the same as the sign of . As a result, is asymptotically stable for all if and unstable if .
4.2. Local Stability of the Diffusion System
- We suppose that and System (17) is asymptotically stable at the steady state if the following hold:
- -
- If and
- -
- If and , and in addition, the eigenvaluessatisfy
- We suppose that and System (17) is asymptotically stable at the steady state if the following hold:
- -
- If and
- -
- If and , and in addition, the eigenvaluessatisfy
- We suppose that and we have two cases:
- We first start with the origin , and we havewhich has the eigenvalue equationwhereandand its discriminant isThe sign of is important to the stability of . The discriminant of in relation to isClearly, , because with we distinguish two cases:
- -
- If , then , and the two solutions of the equation are both negative. Thus, and the roots of (43) areNote that the solutions are real, and also In addition, if , then This leads towhich ensures the asymptotic stability of .
- -
- If , we have This returns us to the previous scenario. Again, for ; thus, and are negative and must meet the conditions of Theorem 3.
- Moving on to the second case where , we will investigate the stability of the equilibrium point , and in order to do so we consider the following:whereandand its discriminant isIn this case, we have the discriminant of in relation to , defined byWe can clearly notice that the discriminant in this case is identical to the one calculated previously; therefore, we summarized the dynamics of the system concerning the in Theorem 5.
- Moving on to the last case where , we will investigate the stability of the equilibrium points and .
- -
- We start by considering the Jacobian matrix of , and we havewhereandand its discriminant isThe discriminant of in relation to isThe discriminant in this situation is obviously similar to the one determined previously; therefore, we summarized the dynamics of the system concerning the in Theorem 5.
- -
- Finally, let us consider the equilibrium pointwhereandand its discriminant isThe discriminant of in relation to isWe can easily see that the discriminant in this case is also similar to the one determined previously; thus, we outlined the dynamics of the system concerning the in Theorem 5.
5. Global Stability
- If , then
- If , then
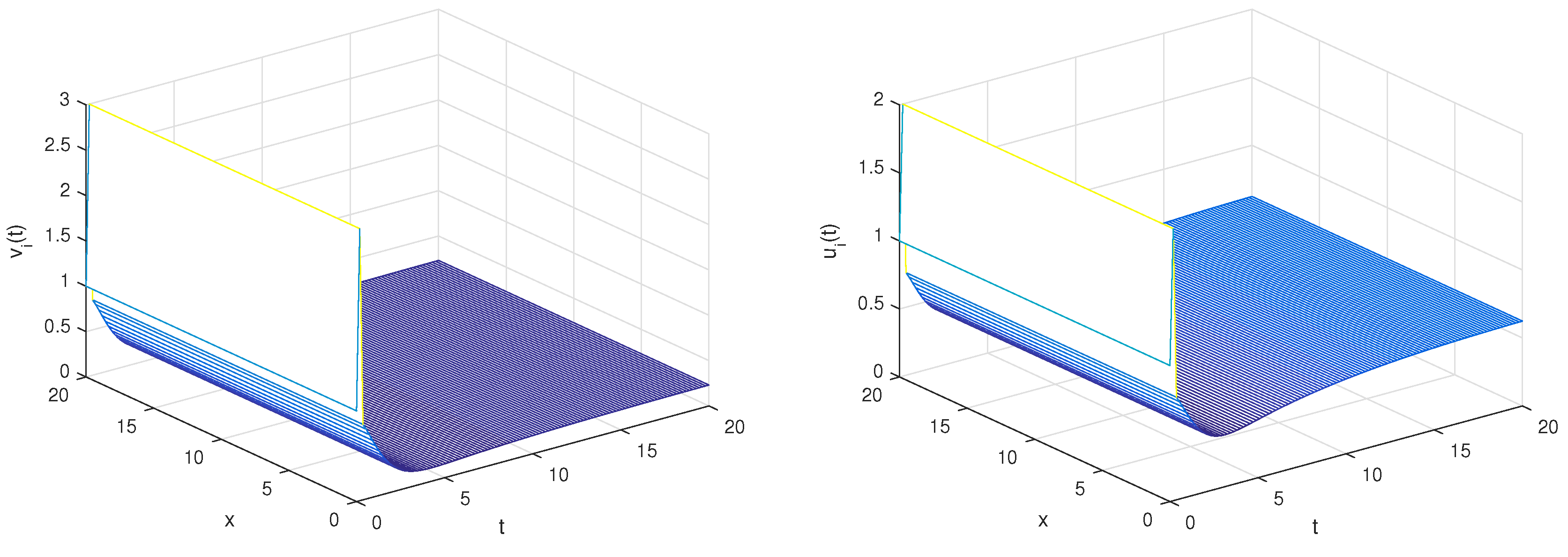
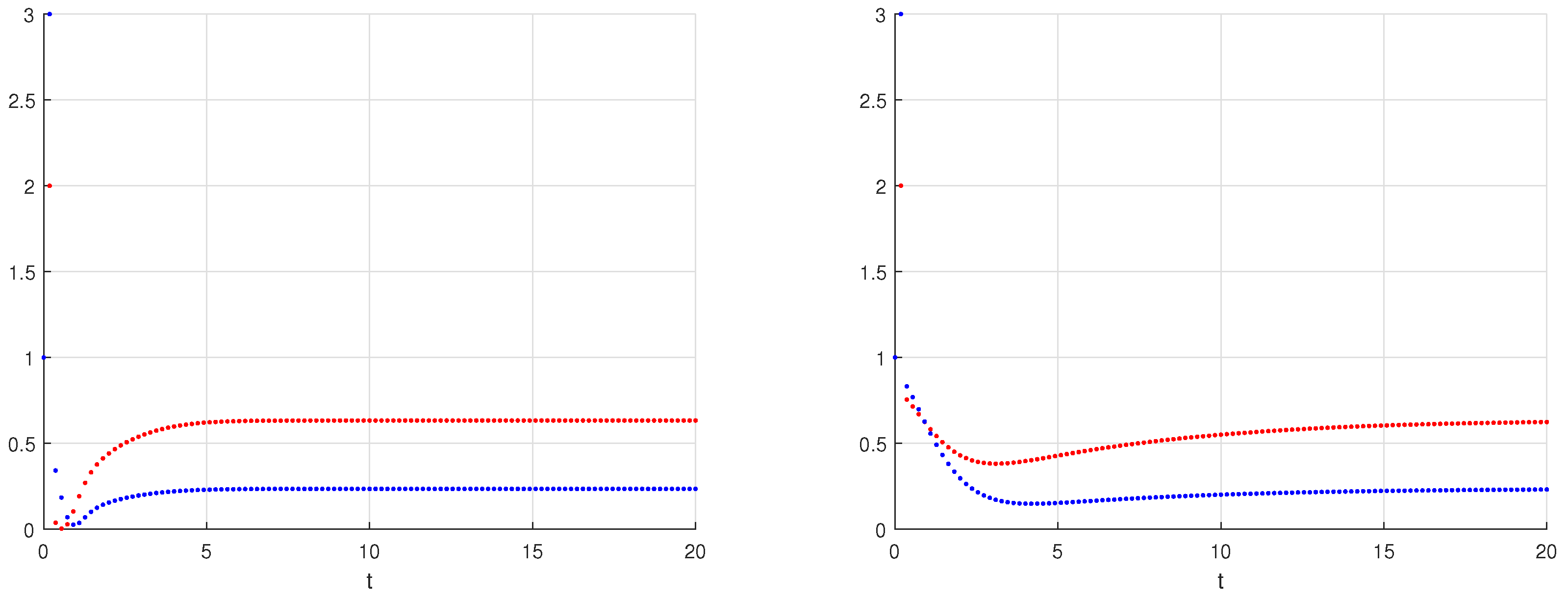
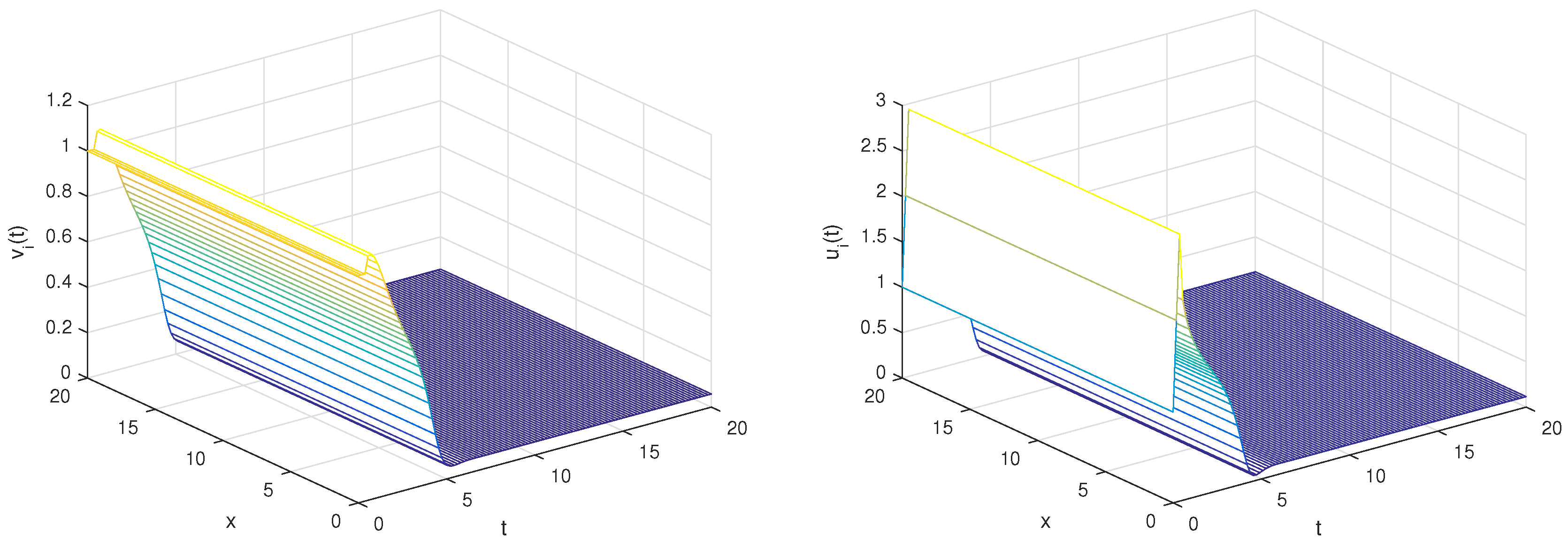
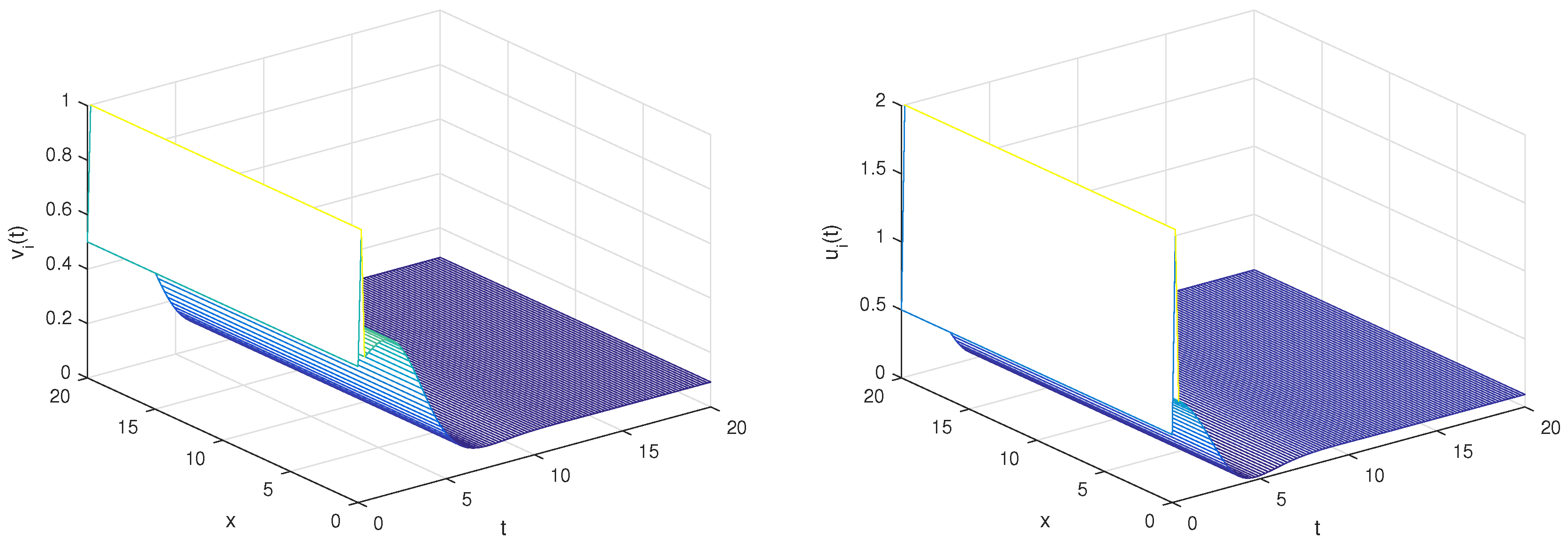
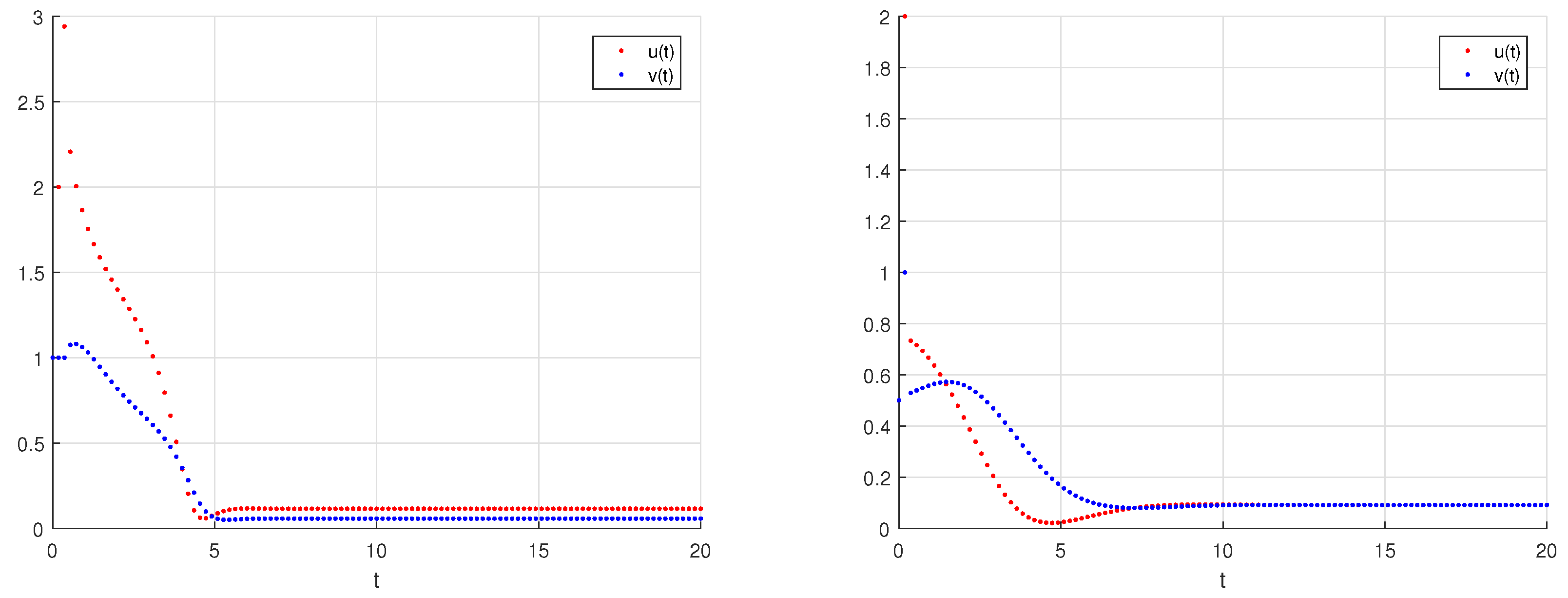
6. Numerical Simulations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Oldham, K.B. The Fractional Calculus; Spanier, J., Ed.; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: Cham, Switzerland, 1993. [Google Scholar]
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Dababneh, A.; Djenina, N.; Ouannas, A.; Grassi, G.; Batiha, I.M.; Jebril, I.H. A new incommensurate fractional-order discrete COVID-19 model with vaccinated individuals compartment. Fractal Fract. 2022, 6, 456. [Google Scholar] [CrossRef]
- Bonfanti, A.; Kaplan, J.L.; Charras, G.; Kabla, A. Fractional viscoelastic models for power-law materials. Soft Matter 2020, 16, 6002–6020. [Google Scholar] [CrossRef] [PubMed]
- Skwara, U.; Martins, J.; Ghaffari, P.; Aguiar, M.; Boto, J.; Stollenwerk, N. Applications of fractional calculus to epidemiological models. Aip Conf. Proc. 2012, 1479, 1339–1342. [Google Scholar]
- Acay, B.; Bas, E.; Abdeljawad, T. Fractional economic models based on market equilibrium in the frame of different type kernels. Solitons Fractals 2020, 130, 109438. [Google Scholar] [CrossRef]
- Tarasov, V.E. Mathematical economics: Application of fractional calculus. Mathematics 2020, 8, 660. [Google Scholar] [CrossRef]
- Acay, B.; Inc, M. Electrical circuits RC, LC, and RLC under generalized type non-local singular fractional operator. Fractal Fract. 2021, 5, 9. [Google Scholar] [CrossRef]
- Atici, F.M.; Eloe, P.W. A transform method in discrete fractional calculus. Int. J. Differ. Equ. 2007, 2, 165–176. [Google Scholar]
- Atici, F.; Eloe, P. Initial value problems in discrete fractional calculus. Proc. Am. Math. Soc. 2009, 137, 981–989. [Google Scholar] [CrossRef]
- Atici, F.M.; Eloe, P. Discrete fractional calculus with the nabla operator. Electron. J. Qual. Theory Differ. Equ. 2009, 2009. [Google Scholar] [CrossRef]
- Atıcı, F.M.; Şengül, S. Modeling with fractional difference equations. J. Math. Anal. Appl. 2010, 369, 1. [Google Scholar] [CrossRef]
- Holm, M. Cubo Sum and difference compositions in discrete fractional calculus. Temuco 2011, 13, 153–184. [Google Scholar]
- Atıcı, F.M.; Eloe, P.W. Two-point boundary value problems for finite fractional difference equations. J. Differ. Equ. Appl. 2011, 17, 445–456. [Google Scholar] [CrossRef]
- Hioual, A.; Ouannas, A.; Grassi, G.; Oussaeif, T.E. Nonlinear nabla variable-order fractional discrete systems: Asymptotic stability and application to neural networks. J. Comput. Appl. Math. 2023, 423, 114939. [Google Scholar] [CrossRef]
- Batiha, I.M.; Alshorm, S.; Ouannas, A.; Momani, S.; Ababneh, O.Y.; Albdareen, M. Modified Three-Point Fractional Formulas with Richardson Extrapolation. Mathematics 2022, 10, 3489. [Google Scholar] [CrossRef]
- Saadeh, R.; Abbes, A.; Al-Husban, A.; Ouannas, A.; Grassi, G. The Fractional Discrete Predator–Prey Model: Chaos, Control and Synchronization. Fractal Fract. 2023, 7, 120. [Google Scholar] [CrossRef]
- Ouannas, A.; Batiha, I.M.; Bekiros, S.; Liu, J.; Jahanshahi, H.; Aly, A.A.; Alghtani, A.H. Synchronization of the glycolysis reaction-diffusion model via linear control law. Entropy 2021, 23, 1516. [Google Scholar] [CrossRef]
- Al Noufaey, K.S. Stability analysis for Selkov-Schnakenberg reaction-diffusion system. Open Math. 2021, 19, 46–62. [Google Scholar] [CrossRef]
- Madzvamuse, A.; Gaffney, E.A.; Maini, P.K. Stability analysis of non-autonomous reaction-diffusion systems: The effects of growing domains. J. Math. Biol. 2010, 61, 133–164. [Google Scholar] [CrossRef]
- Anakira, N.; Hioual, A.; Ouannas, A.; Oussaeif, T.E.; Batiha, I.M. Global Asymptotic Stability for Discrete-Time SEI Reaction-Diffusion Model. In Proceedings of the International Conference on Mathematics and Computations, Amman, Jordan, 11–13 May 2022; Springer Nature Singapore: Singapore, 2022; pp. 345–357. [Google Scholar]
- Henry, B.I.; Wearne, S.L. Fractional reaction–diffusion. Phys. A Stat. Mech. Its Appl. 2000, 276, 448–455. [Google Scholar] [CrossRef]
- Gafiychuk, V.; Datsko, B.; Meleshko, V. Mathematical modeling of time fractional reaction–diffusion systems. J. Comput. Appl. Math. 2008, 220, 215–225. [Google Scholar] [CrossRef]
- Khan, H.; Gómez-Aguilar, J.F.; Khan, A.; Khan, T.S. Stability analysis for fractional order advection–reaction diffusion system. Phys. A Stat. Mech. Its Appl. 2019, 521, 737–751. [Google Scholar] [CrossRef]
- Lu, Z.; Yu, Y.; Ren, G.; Xu, C.; Meng, X. Global dynamics for a class of reaction–diffusion multigroup SIR epidemic models with time fractional-order derivatives. Nonlinear Anal. Model. Control 2022, 27, 142–162. [Google Scholar] [CrossRef]
- Almatroud, O.A.; Hioual, A.; Ouannas, A.; Grassi, G. On Fractional-Order Discrete-Time Reaction Diffusion Systems. Mathematics 2023, 11, 2447. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Zeng, S.D.; Deng, Z.G. Discrete fractional diffusion equation. Nonlinear Dyn. 2015, 80, 281–286. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Xie, H.P.; Zeng, S.D. Applications of variable-order fractional operators: A review. Int. J. Bifurc. Chaos 2016, 26, 1650013. [Google Scholar] [CrossRef]
- Hodgkin, A.L.; Huxley, A.F. Current and Its Application to Conduction. J. Physiol. 1952, 117, 500–544. [Google Scholar] [CrossRef]
- Pikovsky, A.S.; Kurths, J. Coherence resonance in a noise-driven excitable system. Phys. Rev. Lett. 1997, 78, 775. [Google Scholar] [CrossRef]
- Makarov, V.A.; Nekorkin, V.I.; Velarde, M.G. Spiking behavior in a noise-driven system combining oscillatory and excitatory properties. Phys. Rev. Lett. 2001, 86, 3431. [Google Scholar] [CrossRef]
- Lindner, B.; Garcıa-Ojalvo, J.; Neiman, A.; Schimansky-Geier, L. Effects of noise in excitable systems. Phys. Rep. 2004, 392, 321–424. [Google Scholar] [CrossRef]
- Bendoukha, S.; Abdelmalek, S.; Kirane, M. Spiral-generation mechanism in the two-dimensional FitzHugh–Nagumo system. Nonlinear Anal. Real World Appl. 2020, 53, 103052. [Google Scholar] [CrossRef]
- Ambrosio, B.; Aziz-Alaoui, M.A. Synchronization and control of coupled reaction–diffusion systems of the FitzHug–Nagumo type. Comput. Math. Appl. 2012, 64, 934–943. [Google Scholar]
- Ouannas, A.; Mesdoui, F.; Momani, S.; Batiha, I.; Grassi, G. Synchronization of FitzHugh-Nagumo reaction-diffusion systems via one-dimensional linear control law. Arch. Control. Sci. 2021, 31, 1–13. [Google Scholar]
- Al-Juaifri, G.A.; Harfash, A.J. Finite element analysis of nonlinear reaction–diffusion system of fitzhugh–nagumo type with robin boundary conditions. Math. Comput. Simul. 2023, 203, 486–517. [Google Scholar] [CrossRef]
- Khanday, F.A.; Kant, N.A.; Dar, M.R.; Zulkifli, T.Z.A.; Psychalinos, C. Low-voltage low-power integrable CMOS circuit implementation of integer- and fractional-order FitzHugh–Nagumo neuron model. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 2108–2122. [Google Scholar] [CrossRef]
- Tabi, C.B. Dynamical analysis of the FitzHugh–Nagumo oscillations through a modified Van der Pol equation with fractional-order derivative term. Int. J. Non-Linear Mech. 2018, 105, 173–178. [Google Scholar] [CrossRef]
- Kelley, W.G.; Peterson, A.C. Difference Equations: An Introduction with Applications; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Baleanu, D.; Wu, G.C.; Bai, Y.R.; Chen, F.L. Stability analysis of Caputo–like discrete fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 48, 520–530. [Google Scholar] [CrossRef]
- Hioual, A.; Ouannas, A.; Oussaeif, T.E.; Grassi, G.; Batiha, I.M.; Momani, S. On variable-order fractional discrete neural networks: Solvability and stability. Fractal Fract. 2022, 6, 119. [Google Scholar] [CrossRef]
- Abdeljawad, T. Different type kernel h-fractional differences and their fractional h-sums. Chaos Solitons Fractals 2018, 116, 146–156. [Google Scholar] [CrossRef]
- Čermák, J.; Nechvátal, L. On a problem of linearized stability for fractional difference equations. Nonlinear Dyn. 2021, 104, 1253–1267. [Google Scholar] [CrossRef]
- Zheng, Q.; Shen, J. Pattern formation in the FitzHugh–Nagumo model. Comput. Math. Appl. 2015, 70, 1082–1097. [Google Scholar] [CrossRef]
- Tasbozan, O. A popular reaction-diffusion model fractional Fitzhugh-Nagumo equation: Analytical and numerical treatment. Appl. Math. J. Chin. Univ. 2021, 36, 218–228. [Google Scholar] [CrossRef]
- Smith, G.D.; Smith, G.D.; Smith, G.D.S. Numerical Solution of Partial Differential Equations: Finite Difference Methods; Oxford University Press: Oxford, UK, 1985. [Google Scholar]
- Ringqvist, M. On dynamical behaviour of FitzHugh-Nagumo systems. Res. Rep. Math. 2006, 5, 1–81. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, L.J.; Chang, Z.X.; Feng, J.T.; Zhang, G. Turing instability and pattern formation in a semi-discrete Brusselator model. Mod. Phys. Lett. 2013, 27, 1350006. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamadneh, T.; Hioual, A.; Alsayyed, O.; Al-Khassawneh, Y.A.; Al-Husban, A.; Ouannas, A. The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation. Axioms 2023, 12, 806. https://doi.org/10.3390/axioms12090806
Hamadneh T, Hioual A, Alsayyed O, Al-Khassawneh YA, Al-Husban A, Ouannas A. The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation. Axioms. 2023; 12(9):806. https://doi.org/10.3390/axioms12090806
Chicago/Turabian StyleHamadneh, Tareq, Amel Hioual, Omar Alsayyed, Yazan Alaya Al-Khassawneh, Abdallah Al-Husban, and Adel Ouannas. 2023. "The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation" Axioms 12, no. 9: 806. https://doi.org/10.3390/axioms12090806
APA StyleHamadneh, T., Hioual, A., Alsayyed, O., Al-Khassawneh, Y. A., Al-Husban, A., & Ouannas, A. (2023). The FitzHugh–Nagumo Model Described by Fractional Difference Equations: Stability and Numerical Simulation. Axioms, 12(9), 806. https://doi.org/10.3390/axioms12090806