1. Introduction
With the rise of the sharing economy on a global scale, traditional human resource service models are gradually changing. Crowdsourcing, a new flexible employment model, has become a new strategy for enterprises to optimize resource allocation and enhance innovation capabilities. Compared to traditional employment relationships, under the crowdsourcing model, companies do not establish formal full-time employment relationships with talents. Instead, companies can flexibly hire talents on demand based on their employment needs without the need for complex entry and exit processes. Due to the advantages of high employment flexibility, low employment costs, and low employment risks of the crowdsourcing model, as well as breaking the dependence of workers on commercial organizations, more and more enterprises and organizations facing external competition and internal resource shortages are seeking to use crowdsourcing platforms for production and innovation activities.
On knowledge-intensive crowdsourcing platforms, task publishers, problem solvers, and transaction data are growing exponentially. The high cost of information search and the lack of intelligent task recommendation mechanisms have had a negative impact on crowdsourcing participants [
1,
2]. How to activate the potential of structured and unstructured data elements and achieve efficient matching between massive tasks and public intellectual resources is a problem worth studying.
Preference relation (PR) is an important tool for experts to describe the critical degree of the factors in crowdsourcing task recommendation. With the q-rung orthopair fuzzy (q-ROF) set (q-ROFS) theory developing, the q-rung orthopair fuzzy preference relation (q-ROFPR) has the advantages of describing the uncertainty and preference information in crowdsourcing task recommendation.
Thus, we develop a group decision-making (GDM) method under q-ROFPRs for finding out the critical factors in crowdsourcing task recommendation and define the compatibility measure between q-ROFPRs to reflect the important measures of experts. The contributions are provided as follows:
(1) The implication relations and constraints between intuitionistic fuzzy sets (IFSs) and q-ROFSs are analyzed.
(2) We define the multiplicative consistent q-ROFPRs (MCq-ROFPRs) and the normalized q-rung orthopair fuzzy priority weight vectors (q-ROFPWVs) and provide the conversion method for q-ROFPWVs to construct MCq-ROFPRs.
(3) In decision-making problems, evaluators cannot always give MCq-ROFPRs when comparing alternatives, and it is necessary to establish a method to obtain the priority weight vectors (PWVs) of general q-ROFPR. Thus, a goal programming model for obtaining the PWVs is considered to minimize the difference between q-ROFPRs and MCq-ROFPRs and minimize the uncertainty of the PWVs based on the conversion method between q-ROFPWVs and MCq-ROFPRs.
(4) In some GDM problems, decision-makers cannot always subjectively provide expert groups’ weight vectors. In contrast, the judgmental ability of experts can not only provide feedback on the authority and expertise of experts but also objectively indicate the importance of the evaluator in the evaluation process [
3]. In this paper, we extend the goal programming model to the overall goal planning model, use it to construct the ideal MCq-ROFPR, and combine the compatibility measures to obtain the objective weight vector of the expert group.
(5) A GDM method under q-ROFPRs is provided by combing the overall goal programming model and the simple q-ROF weighted geometric (Sq-ROFWG) operator. Considering the advantage of FPRs in expressing experts’ preferences for crowdsourcing recommendation influencing factors, the effectiveness and practicality of the developed GDM method are verified by solving crucial factors in crowdsourcing task recommendation.
The rest of this paper is organized as follows:
Section 2 analyzes some existing literature and provides its drawbacks.
Section 3 introduces some concepts of intuitionistic fuzzy preference relations (IFPRs) and multiplicative consistent IFPRs (MCIFPRs). Then, q-ROFPRs and MCq-ROCPRs are developed in
Section 4. Next,
Section 5 puts forward a goal programming model under MCq-ROFPRs for obtaining the PWVs of experts. The GDM method combining the group goal programming model and the Sq-ROFWG operator is developed in
Section 6. An example of critical factor identification for crowdsourcing task recommendation illustrates the effectiveness of the developed GDM method in
Section 7. Finally, some conclusions are made in
Section 8.
2. Literature Review
In real-life decision problems, decision-makers need to select the best solution from a set of alternatives or arrive at a ranking of alternatives. A group of experts provides preference information on the alternatives, and then the decision-makers use reasonable decision-making methods to obtain credible and convincing decision results. The expert provides their preference for the alternatives based on their expertise. Preference relationship (PR) is an important tool for experts to describe preference information after comparing alternatives. The traditional PR mainly characterizes the preference degree between alternatives on a scale of 1/9~9 [
4] and has been widely used in economic, environmental, and risk management fields [
5,
6,
7,
8,
9]. At present, the research on multiplicative PRs (MPRs) [
10], additive PRs (APRs) [
11], fuzzy PRs (FPRs) [
12], and linguistic PRs (LPRs) [
13] is complete. FPRs use the membership value to characterize the PRs between experts for different solutions. LPRs, on the other hand, described experts’ preference information using a set of linguistic terms. Nowadays, the complexity of real decision-making problems increases with the continuous progress of society. When dealing with time-sensitive and complex decision problems, experts often do not know enough about the evaluated objects or solutions due to their knowledge limitations, resulting in three aspects of their perceptions: positive, negative, and hesitant. In such cases, experts do not necessarily fit their cognitive results when using the above PRs to characterize their preferences for the alternatives. IFSs are an extension of the fuzzy set [
14], which has the advantage of containing information on membership, nonmembership, and hesitation at the same time. Thus, Xu [
15] proposed the concept of IFPRs by incorporating IFSs into PRs. Compared with MPRs, APRs, FPRs, and LPRs, IFPRs can describe the fuzzy nature of the alternatives in a more delicate and reasonable way [
16,
17,
18].
The concept of q-ROFSs was put forward by Yager [
19], which is an extension of IFSs. We see that q-ROFSs continue the advantageous feature that IFSs contain three aspects of information, and the value area and information amount of membership and nonmembership are larger than those of IFSs. It ensures that any IFS is included in the scope of q-ROFS and enhances the flexibility of information representation for decision-makers. The existing research on q-ROFSs mainly includes operation laws, aggregation operators, and decision methods, where operation laws are the basis for calculating operators, operators are used to assemble multiple q-ROFSs with weights, and decision methods are used to solve realistic decision problems. The q-ROF decision methods have been widely applied in different fields. Yager [
19] defined some operation laws and ordered weighted aggregation (OWA) operators for q-ROFSs. Liu and Wang [
20] developed the q-ROF-weighted average (q-ROFWA) and weighted geometric (q-ROFWG) operators and applied them to multi-attribute decision-making (MADM) problems. Wei et al. [
21] investigated some Heronian operators of q-ROFSs and applied them to select enterprise resource planning systems. Peng et al. [
22] developed the exponential operation methods of q-ROFSs, and the developed q-ROF MADM methods have advantages in finding the optimal alternative without being counterintuitive. Riaz et al. [
23] developed a q-ROF TOPSIS method to solve the transport policy selection problem. Alkan and Kahraman [
24] analyzed the measures taken by countries in response to COVID-19, adopted a q-ROF TOPSIS method, and tried to find out the ideal government strategies against the COVID-19 pandemic. Arya and Kumar [
25] defined the entropy and divergence measures of q-ROFSs and developed a comprehensive TODIM-VIKOR to measure the uncertainty of medical supplier selection problems.
In the above decision-making problems, using aggregation operators and decision-making methods of q-ROFSs, the decision information is provided with some common features. The evaluators provide attribute values for each alternative. However, in some decision-making problems, due to the limitations of obtaining knowledge information about the relevant attributes of the alternative set, the evaluator may prefer to provide evaluation information in the form of a two-by-two comparison of alternatives. It is called the preference relations (PRs) or comparison matrix. Thus, the experts do not need to determine the preference information of the alternative under each attribute, and the binary relationship obtained by two-by-two comparison appears to be relatively easy and refined [
26,
27].
Recently, the q-rung orthopair fuzzy information has been combined with PRs and has been used to develop the concepts of q-ROFPRs. Li et al. [
28] defined some q-ROFPRs, including consistency, incompleteness, consistent incompleteness, and acceptable incompleteness. Zhang et al. [
29,
30] defined the q-ROFPRs with additive or multiplicative consistency. Zhang and Chen [
31,
32] completed the q-ROFPRs with additive or multiplicative consistency and developed some GDM methods with incomplete q-ROFPRs. However, experts’ weights are subjective, and the important measures of experts are not reflected in the above GDM methods. In addition, the group q-ROFPRs aggregated using individual q-ROFPRs may not satisfy multiplicative consistency.
Thus, we developed a GDM method in the q-ROFPR environment to find out the critical factors in crowdsourcing task recommendation.
3. Preliminaries
To express the importance measure between the two alternatives, the MPR is defined as follows:
Definition 1 [
4]
. Let be an alternative set and be the MPR, where denotes the preference degree of the alternative over by a scale of 1/9~9, satisfying Remark 1. The symbol represents .
Further, Saaty [
4] defined the consistency of MPR, which is used to measure the reliability and reasonableness of PRs.
Definition 2 [
4]
. Let PR be an MCPR, thenSince , the multiplicative consistency condition is . Saaty [4] provided a sufficient condition for an MCPR , i.e., there exists a standard weight vector , such that , where .
Orlovsky [
33] first used the membership function in fuzzy sets to express the relative importance among alternatives to deal with decision problems characterized by fuzzy uncertainty information. Further, Tanino [
34] refined the definition of FPRs. The concept of fuzzy sets is provided below.
Definition 3 [
35]
. A fuzzy set on the universe is defined as follows:where is the membership function, and the membership value of is a fuzzy number (FN), which indicates the membership degree of the element belong to .
Definition 4 [
33]
. Let be an FPR on , where is the preference degree of the alternative and , then Definition 5 [
33]
. If an FPR is an MCPR, then it satisfies the following conditions:Similar to the PRs of 1/9 to 9 scales, the FPR satisfies the sufficient condition of multiplicative consistency if there is a standard weight vector such that The elements of both MPRs and FPRs are values of 1/9~9 or 0~1. In dealing with some decision problems of high complexity and uncertainty, evaluators prefer to express their preferences among alternatives in terms of certainty, negativity, and hesitation. Thus, IFPRs have been introduced [
15,
36].
Definition 6 [
37,
38]
. An IFS on is defined as follows:where and denote the membership and nonmembership degrees of the elements belonging to the set , respectively. is the hesitation degree of the element belonging to the set .
For convenience, is an intuitionistic fuzzy number (IFN) and is abbreviated as , where . is the hesitation degree of .
Definition 7 [
15]
. Let be an IFPR on the alternative set , where is an IFN, thenwhere denotes the preference degree of the alternative over , is the preference degree of the alternative over , and is the hesitation degree. Liao and Xu [
36] gave a general definition of MCIFPRs based on the membership values.
Definition 8 [
31]
. If an IFPR satisfiesthen is an MCIFPR.Because , its multiplicative consistency condition is .
Similar to FPRs, Wang [
39] provided a normalized intuitionistic fuzzy weight vector (IFWV) and gave a conversion relation between the weight vector and the multiplicative consistency.
Definition 9 [
38]
. If a weight vector satisfies , then is a normalized IFWV, where is an IFN. Theorem 1 [
36]
. If an IFPR satisfies the following conditions:then is an MCIFPR, where is the normalized IFWV in Definition 9. If satisfies in Definition 1, then degenerates to an MCIFPR , and .
Yager [
19] extended IFSs and introduced the concept of q-ROFSs. The q-ROFSs continue the advantageous features of IFSs and extend the information range consisting of membership and nonmembership values, which ensures that all IFSs are included in the scope of q-ROFSs.
Definition 10 [
19]
. Let be a q-ROFS on , and then the q-ROFS is defined as follows:where and denote the membership and nonmembership degrees of the element belonging to the set , respectively. is the hesitation degree.
For convenience, is a q-ROFN, and the q-ROFN is abbreviated as , where . is the hesitation degree.
From Definitions 4 and 10, any IFN is a q-ROFN. For any two q-ROFNs
. Yager [
19] provided the partial order relation
. However, the partial order relation does not distinguish all the q-ROFNs.
Liu and Wang [
20] defined the score and accuracy measures of q-ROFNs to sort them.
Definition 11 [
20]
. Let and be two q-ROFNs, then- (1)
if , then ;
- (2)
if and , then ;
- (3)
if and , then , namely, and ;
where and are score and accuracy measures of , respectively.
According to Definition 11, if , then .
4. Multiplicative Consistent q-ROFPRs
From Definition 10, for any q-ROFN satisfying , if satisfying ,, and , then is an intuitionistic fuzzy number (IFN) according to Definition 6. Therefore, for a q-ROFN, its membership and nonmembership degrees can be converted into IFNs using .
The q-ROFSs are introduced into PRs, and the definition of q-ROFPRs is shown as follows:
Definition 12 [
30]
. Let be a q-ROFPR on , where is a q-ROFN, thenwhere denotes the preference degree of the alternative over , is the preference degree of the alternative to , is the degree of uncertainty and hesitation, and .
In Definition 12, means that the alternative is equally important relative to . For IFPRs, means that the alternative is equally important relative to .
Similar to FPRs and IFPRs, the MCq-ROFPRs are defined as follows:
Definition 13 [
30]
. If the q-ROFPR satisfiesthen is an MCq-ROFPR.Since , then the multiplicative consistency condition is equivalent to .
Similar to the intrinsic connection between IFSs and q-ROFSs, Theorem 2 further presents the connection between IFPRs and q-ROFPRs.
Theorem 2. Let be an IFPR and be a q-ROFPR, the function satisfies , and is its inverse function.
(1) When is an MCq-ROFPR, if satisfies , then is an MCIFPR.
(2) When is an MCIFPR, if satisfies , then is an MCq-ROFPR.
Proof. (1) Since
is an MCq-ROFPR, then
. If
, in IFPR
, then
Therefore, , then satisfies consistent consistency.
(2) The proof is similar to (1).
Based on the partial order relations between q-ROFNs, we discuss the properties of q-ROFPRs. □
Property 1. (Midpoint transferability) Let be an MCq-ROFPR,
(1) When , if and , then .
(2) When , if and , then .
Proof.
(1) When , , then and . Proving by the converse method, assume that , then . From Definition 13, , contradicts the assumption. Therefore, .
(2) The proof is similar to (1). □
Theorem 3. Property 1(1) is equivalent to Property 1(2).
Proof. When , , , , because , , , .
Assume that , Property 1(2) can be expressed in the following form: When , if and , then . Therefore, Property 1(2) is equivalent to Property 1(1). □
Theorem 4. The equivalence of Property 1 is as follows: , .
Proof. In fact, , . Therefore, . □
Property 1(1) can be expressed equivalently in the following form: .
When , Property 1 degenerates to the following special form:
Property 2. Let be an MCq-ROFPR, then Property 2 shows that if the alternative is better than , and the alternative is better than , the preference degree of the alternative over is less than .
In GDM problems, how consistent or divergent between experts or between experts and the expert group is important for the impact of the decision process. Definitions 14 and 15 will give the divergence and compatibility measures between the two PRs.
Definition 14. Let and be two q-ROFPRs, the divergence measure between and is defined as follows: .
Since and , therefore, Theorem 5. For any two q-ROFPRs and , the divergence measure satisfies , and when , then .
Definition 15. The compatibility measure between any two q-ROFPRs and is .
According to Definition 15 and Theorem 5, Corollary 1 is easily obtained.
Corollary 1. (1) ; (2) , when and only when ; (3) .
The compatibility measure can be used to measure the gap between PRs. The higher the compatibility measure, the stronger the consistency degree between PRs. When two PRs are exactly equal, the compatibility measure is 1.
Property 3. , , and are three q-RPFPRs, if and satisfy , then .
Proof. Let , then . According to Definition 14, . Therefore, . □
5. The Goal Programming Model under MCq-ROFPRs for q-ROFPWVs
This section defines the normalized q-ROFPWVs of MCq-ROFPRs, and the specific formula for q-ROFPWVs to construct MCq-ROFPRs is provided. In decision-making problems, evaluators may not always be able to give MCIFPR when comparing alternatives and thus need to study methods to obtain preference weight vectors corresponding to general PFPR. To this end, based on the conversion formula between PFPWV and MCIFPR, an objective planning model for obtaining the priority weight vector is considered to minimize the difference between PFPR and MCIFPR and minimize the uncertainty of the priority weight vector.
(1) MCq-ROFPRs based on normalized weight vectors
Definition 16. If the weight vector satisfiesthen is the normalized q-ROFWV, and is a q-ROFN. Definition 17. The function satisfies Theorem 6. Let be a normalized q-ROFWV, if , it satisfies the following conditions: Then is an MCq-ROFPR.
Proof. First, prove that
is a q-ROFPR, i.e., prove that
is a q-ROFN. When
, it obviously holds. When
, because
, according to Definition 17, then
Therefore,
is a q-ROFN. Then
is a q-ROFPR. Then, it should prove that
satisfies the multiplicative consistency.
□
Corollary 2. For a q-ROFPR , if there exists a normalized q-ROFWV satisfyingthen is an MCq-ROFPR. Theorem 7. Let be an MCq-ROFPR, and be the normalized q-ROFWV of , if the IFWV satisfies , then is a normalized IFWV.
(2) Priority weight vector based on the goal programming model
For a q-ROFPR
, if there exists a standardized q-ROFWV
, then
is an MCq-ROFPR. However, in some realistic decision problems, experts may not be able to propose an MCq-ROFPR. To obtain the standardized weight vector of
, we propose a goal programming model with the objective of minimizing the deviation between
and
and minimizing the hesitation of
. Finally, the corresponding standardized weight vector of
is obtained [
32].
From Theorem 6, an MCq-ROFPR can be constructed based on the standardized q-ROFWV . The membership deviation and nonmembership deviation between and are , .
The smaller the membership deviation and the nonmembership deviation , the higher the consistency degree between and the MCq-ROFPR .
In addition to considering the deviation values, the hesitancy of the elements of the MCq-ROFPR is .
For
, the increase or decrease in the value
is consistent with that of
. Therefore,
should be considered for the hesitation of
. Furthermore, since
and the hesitation value
is less than or equal to the hesitancy of the upper triangular element of
The lower the hesitation, the stronger the confidence of .
Based on the above analysis, the following model (21) is constructed to minimize the deviation and minimize the hesitation:
According to Definition 12,
. Therefore, the model (21) only needs to consider the upper triangular element of the PR:
. Assume that
Then .
Therefore, model (21) can be replaced with the following model (22):
The normalized weight vector of can be obtained by solving the model (22): .
6. Group Decision-Making Method Based on the Group Goal Programming Model and the Sq-ROFWG Operator
6.1. Problem Description
In the GDM problem under q-ROFPRs with unknown expert weights, the alternative set is , and the expert group is . Based on the alternative information provided by the decision-makers, the expert makes a two-by-two comparison of the alternatives and , provides the q-ROFPR , where is a q-ROFN. In order to obtain the ranking of the alternatives in , the normalized q-ROFWV is obtained. Thus, we propose a GDM method based on the Sq-ROFWG operator and goal programming model, apply it to solve the q-ROFWV, and finally obtain the optimal alternative.
6.2. Expert Weight Calculation
To solve the GDM problem, we need to determine the weight vector of the expert group first. Thus, the above individual goal programming model should be extended to a GDM method, and the overall normalized q-ROFWV is obtained to construct an ideal MCq-ROFPR . Then, we develop the compatibility measure between the individual q-ROFPR and the ideal MCq-ROFPR to obtain the weight vector of experts.
The consistency of each element of the ideal MCq-ROFPR
with the corresponding element of the individual q-ROFPR given by each expert should be high, i.e., the deviation should be minimized. Next, the overall goal programming model is constructed to obtain the ideal MCq-ROFPR
. The standardized weight vector of
is
. Inspired by the models (21) and (22), an overall programming model with the objective of minimizing the deviation among
and all individuals
and minimizing the hesitation of the weight vector
is constructed. In contrast to model (22), if the overall deviation is considered, only the relevant variables and objectives of the model (22) need to be adjusted, and the detailed adjustments are as follows:
Furthermore, the overall goal programming model (23) is constructed as follows:
Because
is equivalent to
Similarly,
is equivalent to
And .
Based on the above analysis, model (23) can be converted into the model (24).
The model (24) is solved to obtain the overall normalized q-ROFWV
, and the ideal q-ROFPR
is constructed as
The ideal MCq-ROFPR
is constructed based on the overall goal programming model with the objective of minimizing the hesitancy of
and the deviation between
and all individuals
. Therefore, the compatibility measure between the individual PRs
and the ideal
reflects the consistency degree between the expert and the group opinion and examines the expert’s judgment level. Therefore, the compatibility measure between individual PRs
and ideal PR
is used to obtain the expert weights
.
6.3. Aggregation of Individual q-ROFPRs Using the Sq-ROFWG Operator
After obtaining the weight vectors of the expert group, using a reasonable q-ROF operator to aggregate the individual q-ROFPRs into a comprehensive q-ROFPR is one of the important steps to solve the GDM problem. Next, the aggregation operators are analyzed as follows:
Definition 18. Let be a set of q-ROFNs, whose weight vector is , then
(1) The q-rung orthopair fuzzy weighted geometric (q-ROFWG) operator [20] is defined as follows: (2) The symmetric q-rung orthopair fuzzy weighted geometric (SYq-ROFWG) operator is defined as follows: Let
be the q-ROFPR provided by the expert group
, and
be the weights of
. Assume that all
are MCq-ROFPRs, then they satisfy
According to Definition 18, the q-ROFWG and SYq-ROFWG operator is used to assemble the individual PRs that satisfy the multiplicative consistency, and the analysis is as follows:
(1) The obtained integrated q-ROFPR
using the q-ROFWG operator satisfies
then
does not necessarily hold. Therefore,
does not necessarily satisfy the multiplicative consistency.
(2) The obtained integrated PR
using the SYq-ROFWG operator satisfies
then
does not necessarily hold. Therefore,
does not satisfy the multiplicative consistency.
Based on the above analysis, the integrated q-ROFPR obtained from individual MCq-ROFPRs using the q-ROFWG and SYq-ROFWG operators is not necessarily an MCq-ROFPR.
Therefore, we propose the simple q-ROF weighted geometric (Sq-ROFWG) operator.
Definition 19. Let be a set of q-ROFNs, whose weight vector is . The Wq-ROFWG operator is defined as follows: Theorem 8. If the individual PRs are all MCq-ROFPRs, then the integrated matrix obtained using the Sq-ROFWG operator is still an MCq-ROFPR.
Proof. The integrated matrix obtained using the SYq-ROFWG is
. From Definition 19,
satisfies
and
. Then
Since all
satisfy the multiplicative consistency, then
. Thus,
Therefore, the integrated matrix obtained using the Sq-ROFWG operator is an MCq-ROFPR. □
Theorem 9. If the individual PR and the ideal MCq-ROFPR satisfy , then the integrated PR obtained from the Sq-ROFWG operator satisfies , where is the deviation threshold.
Proof. For any
,
. From
, then
then
Therefore, . □
According to Theorem 8, if all the individual q-ROFPRs satisfy the multiplicative consistency, then the combined q-ROFPRs obtained using the Sq-ROFWG operator still satisfy the multiplicative consistency. According to Theorem 9, if the compatibility measure between the individual PRs and the ideal MCq-ROFPRs is less than a given threshold, then the compatibility measure between the integrated PRs using the Sq-ROFWG operator and the ideal MCq-ROFPRs is still less than the given threshold. Therefore, the Sq-ROFWG operator is used as an aggregation operator to obtain the integrated q-ROFPRs.
6.4. GDM Method Based on the Group Goal Programming Model and the Sq-ROFWG Operator
Above all, the steps of the developed GDM method are as follows:
Step 1: Use the individual PRs provided by the expert group to construct the model (24) and solve it to obtain the . The ideal MCq-ROFPR is obtained using Equation (25).
Step 2: calculate the divergence measure and compatibility measure between
and
using Equation (15) and Definition 14.
The weight vector of experts is calculated using Equation (26).
Step 3: combine the expert weight vector and aggregate to obtain the combined PR using the Sq-ROFWG operator (Equation (31)).
Step 4: construct the goal programming model (22) to calculate the vector based on the combined q-ROFPR .
Step 5: rank the weight vectors to obtain the optimal alternative based on Definition 11.
7. A Numerical Example
In order to find out the critical factors of crowdsourcing task recommendation, assume that a group of three decision-makers formed an expert group : a platform manager , a system designer , and a professor focused on crowdsourcing. The weight vector of decision-makers is unknown. The experts compared four factors: subject preference , skill , historical performance , and social capital . Before designing a recommendation system, it is necessary to use expert experience to identify critical factors in crowdsourcing task recommendation, serving the feature extraction of the recommendation system.
The experts
compare the influence factors
and
and provide the q-ROFPRs
, where
is a q-ROFN. Next, assume that
, the four factors are ranked using the developed GDM method, and the steps are as follows:
Step 1: Substitute the q-ROFPRs
into the model (24) and solve the normalized q-ROFWV.
The ideal MCq-ROFPR
is obtained using Equation (21).
Step 2: calculate the compatibility measures between
and
using Equations (15) and (32).
The expert weight vector is calculated as using Equation (26).
Step 3: gather individual PRs
using the Sq-ROFWG operator (Equation (31)) to obtain the comprehensive q-ROFPR
.
Step 4: Substitute
into the model (22) to obtain the normalized q-ROFWV.
Step 5: Calculate the scores of the weight vector according to Definition 11.
Then the ranking of influence factors is obtained as . Therefore, the crucial factor in crowdsourcing task recommendation is (subject preference).
In addition, the divergence measures between the individual q-ROFPRs
and the ideal MCq-ROFPR
are calculated using Definition 14.
The divergence between the combined q-ROFPR and is , the compatibility measure is , which demonstrates the soundness of Theorem 9.
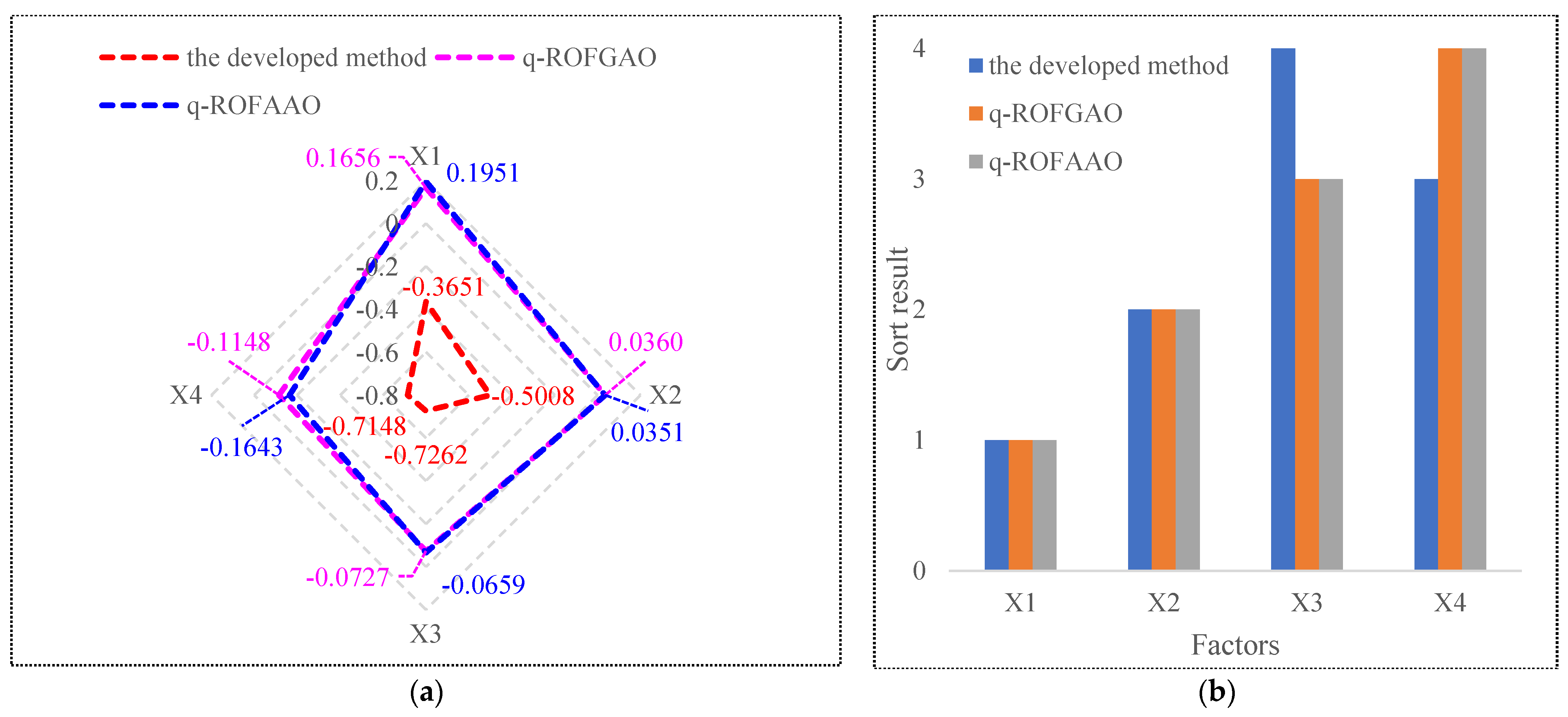
The q-ROFPR-based GDM method is compared with the q-ROF geometric averaging operator (q-ROFGAO) and the arithmetic averaging operator (q-ROFAAO) [
28] to find the critical factors of crowdsourcing task recommendation. The scores and sort results obtained using the three different methods are presented in
Figure 1. The scores of the q-ROFGAO method are 0.1656, 0.0360, −0.0727, and −0.1148, and the scores of the q-ROFAAO method are 0.1951, 0.0351, −0.0659, and −0.1643. The sorting results of the three methods are generally consistent, but there are differences in the sorting of
X3 and
X4. This is due to the objective weight vector of experts obtained by comparing the differences in individual and group FPRs. The proposed q-ROFPR-based GDM method uses objective weighting methods to identify critical factors in crowdsourcing task recommendation, which is more reliable than the q-ROFGAO and q-ROFAAO methods.
Finally, the managerial implications are provided as follows: in the problem of crowdsourcing task recommendation, all participants place greater emphasis on subject preference, then skill, social capital, and historical performance.
8. Conclusions
In the GDM process, q-ROFSs have a strong advantage in expressing the uncertainty of attributes. Meanwhile, q-ROFPRs play a very important role in expressing the PRs among the alternatives flexibly without scoring all alternatives under the corresponding attributes. However, in the existing MCq-ROFPR methods, experts’ weights are subjective, and the importance measures of experts are not reflected in the GDM methods. In addition, the group q-ROFPRs aggregated using individual q-ROFPRs may not satisfy multiplicative consistency.
Thus, we developed a GDM method under q-ROFPRs, considering the important measures of experts. Firstly, the implication relations and constraints between IFSs and q-ROFSs were analyzed. Then, we introduced the MCq-ROFPRs and the normalized q-ROFPWVs. Next, a goal programming model under q-ROFPRs was developed to obtain the q-ROFPWVs. Further, a GDM method under q-ROFPRs was provided by combing the overall goal programming model and the simple q-ROF weighted geometric (Sq-ROFWG) operator. Finally, the effectiveness and practicality of the developed GDM method were verified by identifying crucial factors in crowdsourcing task recommendation. The results show that the developed GDM method effectively considers the importance measures of experts and identifies the critical factors that are more reliable than the q-ROFGAO and q-ROFAAO methods in crowdsourcing task recommendation.
However, the developed GDM method only quantitatively estimates the preference degree of experts in finding out critical factors. In the future, we will use natural language processing and deep learning methods to evaluate the importance of influencing factors and improve the efficiency of crowdsourcing task recommendation.




{kind=link}