All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
The paper introduces a new two-level time-mesh difference scheme for solving the symmetric regularized long wave equation. The scheme consists of three steps. A coarse time-mesh and a fine time-mesh are defined, and the equation is solved using an existing nonlinear scheme on the coarse time-mesh. Lagrange’s linear interpolation formula is employed to obtain all preliminary solutions on the fine time-mesh. Based on the preliminary solutions, Taylor’s formula is utilized to construct a linear system for the equation on the fine time-mesh. The convergence and stability of the scheme is analyzed, providing the convergence rates of in the discrete -norm for and in the discrete -norm for . Numerical simulation results show that the proposed scheme achieves equivalent error levels and convergence rates to the nonlinear scheme, while also reducing CPU time by over half, which indicates that the new method is more efficient. Furthermore, compared to the earlier time two-mesh method developed by the authors, the proposed scheme significantly reduces the error between the numerical and exact solutions, which means that the proposed scheme is more accurate. Additionally, the effectiveness of the new scheme is discussed in terms of the corresponding conservation laws and long-time simulations.
In this paper, the following initial boundary value problem of the symmetric regularized long wave (SRLW) Equation [1] is considered:
where and are the fluid velocity and the density, respectively.
The SRLW equation is a partial differential equation that takes into account the effects of dispersion and nonlinearity utilized to depict a range of physical phenomena such as nonlinear optics, fluid dynamics, and quantum mechanics. In nonlinear optics, it is employed to study the propagation of optical pulses in materials with nonlinear properties. In fluid dynamics, it is used to model the behavior of shallow water waves and to study wave interactions in coastal regions. In quantum mechanics, it is applied to describe the dynamics of Bose–Einstein condensates and other quantum systems. Currently, many researchers have employed various methods to obtain exact traveling and solitary wave solutions for the SRLW equation, such as the exp-function method [2], ()-expansion method [3], Lie symmetry approach [4], analytical method [5], sine–cosine method [6], etc.
Significant achievements have also been made in the research of numerical solutions for the SRLW equation. Guo [7] conducted a study on the existence, uniqueness, and regularity of numerical solutions for the periodic initial value problem of the generalized SRLW equation using the spectral method. Zheng et al. [8] proposed a Fourier pseudospectral method with a restraint operator for the SRLW equation that demonstrated stability and optimal error estimates. Shang et al. [9] analyzed a Chebyshev pseudospectral scheme for multi-dimensional generalized SRLW equations. Fang et al. [10] studied the presence of global attractors of the SRLW equation. Wang et al. [11] investigated a coupled two-level and nonlinear-implicit finite difference method for solving the SRLW equation, achieving second-order accuracy in both space and time. Bai et al. [12] studied a finite difference scheme with two layers for the SRLW equation, which is a conservative scheme and converges with an order of in the norm for u and in the norm for . Xu et al. [13] solved a dissipative SRLW equation containing a damping term using a mixed finite element method. Yimnet et al. [14] introduced a novel finite difference method in which a new average difference technique with four levels is employed to solve the u independently from the of the SRLW equation. In order to achieve better solving results, many researchers have constructed difference schemes with higher convergence orders. Nie [15] constructed a decoupled finite difference scheme with fourth-order accuracy for solving the SRLW equation. Hu et al. [16] introduced a novel conservative Crank–Nicolson finite difference scheme for the SRLW equation. This scheme achieves an accuracy of without refined mesh. Kerdboon et al. [17] proposed a three-point compact difference scheme for the SRLW equation. He et al. [18] presented a compact difference scheme with four time-levels for the SRLW equation. The scheme is constructed for the SRLW equation with a sole nonlinear velocity term and exhibits a high accuracy of . However, most of the high convergence accuracy scheme deal with the points near the boundary via the use of ghost points or fictitious points. Li et al. [19] proposed a compact scheme for the SRLW equation that avoids the use of ghost points by utilizing inverse compact operators. He et al. [20] also proposed a novel conservative three-point linearized compact difference scheme to handle the challenges posed by discrete boundaries and nonlinear terms in solving SRLW equations.
The combination of the time two-mesh (TT-M) technique [21,22,23,24,25,26,27] with other numerical methods also can improve the efficiency of solving nonlinear partial differential equations. Liu et al. [21] investigated a finite element method with the TT-M technique, which was successfully applied to solve the fractional water wave model and other fractional models. Afterward, other authors [22,23,24,25,26] used the TT-M method to study the numerical solutions for the partial differential equations such as the Allen–Cahn model, Sobolev model and the nonlinear Schrödinger equation. Gao et al. [27] introduced a TT-M finite difference scheme for the SRLW equation, achieving first-order accuracy in time and second-order accuracy in space. However, the error in the numerical solutions of the scheme increases rapidly over a long time period, making it hard to simulate the long-time behavior of Equation (1).
To improve the efficiency and accuracy of numerical schemes for the SRLW equation, in this paper, we construct a second-order two-level time-mesh finite difference scheme based on the nonlinear scheme in [16]. As a result, the proposed scheme achieves a convergence rate of in the discrete -norm for and in the discrete -norm for . The proposed scheme has several advantages: (i) Combined with the two level time-mesh technique, the scheme utilizes the nonlinear scheme on a coarse time-mesh and then constructs a linear difference system on a fine time-mesh, which more efficiently solves the SRLW equation than the nonlinear scheme in [16]; (ii) The new scheme obtains a high accuracy in solving the SRLW equation. The proposed scheme has a second-order convergence rate in time and a fourth-order convergence rate in space, which is higher than that of the scheme in [27]; (iii) The convergence and stability of the scheme have been verified through detailed proofs. Theoretical analysis of the scheme is more intricate compared to existing TT-M methods since a function with three variables is used in the process of the linear system construction.
The rest of this article is structured as follows: Section 2 introduces the notations and lemmas. Following that, Section 3 outlines the construction of the two-level time-mesh finite difference numerical scheme. In Section 4, we delve into the convergence and stability of the scheme. Next, Section 5 offers numerical results to test the theoretical findings, computational efficiency, and accuracy of the scheme. Finally, in Section 6, we conclude the paper.
2. Some Notations and Lemmas
For time and space intervals and , let be the time-level and be the space mesh point, where and h represent time and space step sizes.
Let be the space of mesh functions, where and are ghost points. The following notations will be used in this paper:
M is used to denote a general positive constant, which may have different values in different locations.
We define the discrete inner product and norms with respect to any pair of mesh functions as follows:
Lemma1
(See [16]). , by Cauchy–Schwarz inequality, we have
(See [26]). Assume that a sequence of non-negative real numbers satisfying
has the inequality , where and τ are positive constants.
Lemma4
(See [28]). For a mesh function , there exists constants and , such that
3. Construction of Two-Level Time-Mesh Difference Scheme
This article is inspired by the approach presented in [16], which involves a nonlinear implementation and requires a significant amount of CPU time. To address the problem, this study constructed a numerical difference scheme by incorporating the two-level time-mesh technique for the SRLW equation.
Prior to introducing the proposed scheme, we define the coarse time-mesh and the fine time-mesh. First, the time interval is equally divided into P small time intervals. This divided time-mesh is called a coarse time-mesh. Secondly, each small time interval is further partitioned into intervals. The mesh after this second segmentation is called a fine time-mesh. The coarse time-mesh has the time levels and , and the fine time-mesh has the time levels and , where and are the coarse and fine time step size, respectively. The combination of above two different time-meshes is referred to as a two-level time-mesh.
The two-level time-mesh difference scheme for the SRLW equation is presented as follows. Let be the numerical solutions on the coarse time-mesh, then we calculate the and by the following nonlinear scheme in [16],
where ,
Then, using the solutions and obtained at time levels from the initial step, we employ Lagrange’s linear interpolation formula to calculate at time levels and and have
By following the previous two steps, we obtain all the numerical solutions and on the fine time-mesh. It is important to note that the numerical solutions and are only preliminary solutions and not the ultimate numerical solutions we aim to achieve for the SRLW equation.
Remark1.
The solutions are not essential for the subsequent step but are used for convergence and stability analysis of the proposed scheme.
Next, we design a linear system on the fine time-mesh to obtain the final numerical solutions for the SRLW equation. Let be the numerical solutions on the fine time-mesh, then similar to Equations (2) and (3), we obtain
However, as we know, Equation (6) is still a nonlinear scheme. In order to construct the linear system, we use Taylor’s formula to linearize the nonlinear terms of Equation (6) as follows. Using the notations in Section 2, we have
where . Then, the Taylor’s formula expansion is used to linearize the first part of Equation (8) at point and the second part of Equation (8) at point , respectively, to obtain
and
Substituting Equations (8)–(10) into Equation (6) and denoting , , , , , , , , we construct a novel linear difference scheme that achieves a second-order convergence rate in time and a fourth-order convergence rate in space on the fine time-mesh as follows:
where
are the three partial derivatives of with respect to . The benefit of our method is that we avoid having to solve nonlinear equations at many time levels, and that instead, solve a much less expensive linear system.
Remark2.
From Equation (11), one knows that the values , , are utilized to obtain the . However, similar to the Gauss–Seidel method applied to linear systems, our scheme has been modified by using obtained from the previous time level instead of in the calculation process to enhance the accuracy of the numerical solutions .
Remark3.
The nonlinear system (2)–(3) is solved by Newton’s method and when , iteration stops, where k is the number of iterations. The linear system (11)–(12) is computed by a direct solver.
4. The Convergence and Stability Analysis of the Scheme
In this section, we focus on conducting a convergence and stability analysis of scheme (2)–(5) on the coarse time-mesh and scheme (11)–(12) on the fine time-mesh. Let be the exact solutions of problem (1), then the truncation errors of the difference scheme (2)–(3) are obtained as follows:
By Taylor series expansion, we conclude
Theorem1.
Suppose that , then the solutions of difference scheme (2)–(5) converge to the solutions of problem (1) with an order of by the norm for and by the norm for
Proof of Theorem1
Denote . Subtracting Equation (2) from Equation (13), we obtain
Subtracting Equation (3) from Equation (14), we obtain
The following validation of the theorem consists of two situations: (i) We first prove the situation of ; please refer to the references [16,27] for the proof of this part. In the end, we obtain
From Lemma 4, we have
(ii) Next, we prove the situation of and . We use Lagrange’s interpolation formula and obtain
Subtracting Equation (4) from Equation (19), we obtain
Subtracting Equation (5) from Equation (20), we obtain
From the triangle inequality and the results (17) and (18), we conclude
and
We derive the result of Theorem 1 by combining the two above-mentioned cases. □
Theorem2.
Suppose that , then the solutions of difference scheme (2)–(5) are stable by the norm for and by the norm for
Proof of Theorem2.
The theorem can be proved in the same way as that used to prove Theorem 1. □
Next, we analyze the convergence and stability of linear system (11) and (12) on the fine time-mesh. For simplification, we further denote , , , , , , , , , , , , where , , , , , are the second-order partial derivatives of , , , then the truncation errors of the scheme (11)–(12) are obtained as follows:
Theorem3.
Suppose that , then the solutions of difference scheme (11)–(12) converge to the solutions of problem (1) with an order of by the norm for and by the norm for
Proof of Theorem3.
Denote , Subtracting Equation (11) from Equation (23), we obtain
where
Subtracting Equation (12) from Equation (24), we have
Taking the inner product (·, ·) on both sides of Equation (25) with , we have
Notice that
Furthermore, from Lemmas 1 and 2, Lemma 4.2 in [16], and the Cauchy–Schwarz inequality, we have
Substituting Equations (28)–(37) into Equation (27), then
Taking the inner product (·, ·) on both sides of Equation (26) with , we obtain
We also have
Substituting Equations (40) and (41) into Equation (39), then
Choosing to be sufficiently small such that , then
Summing the inequalities in Equation (44) from 0 to , we obtain
From Lemma 3, we have
Using the initial and boundary conditions, we get following results from Equation (45)
Using Lemma 4, this leads to
This completes the proof of the Theorem. □
Theorem4.
Suppose that , then the solutions of difference scheme (11)–(12) are stable by the norm for and by the norm for
Proof of Theorem4.
The way used to prove Theorem 3 can also be applied to demonstrate the validity of this theorem. □
5. Numerical Simulation Results
In this section, we conducted several numerical simulations of the proposed scheme for solving the SRLW equation. On the one hand, we present the computational efficiency and numerical accuracy of the proposed scheme and compare the obtained results with the nonlinear scheme in [16] and the TT-M difference scheme in [27], respectively. On the other hand, we focus on the conservation laws and the long-time behavior simulation of the proposed scheme. All simulations are implemented on a personal computer running Windows 10 with an Intel(R) i7-10710U 1.61 GHz CPU and 16 GB of memory using Matlab R2019b.
For all experiments, we selected the following domains and parameters: , , and . The SRLW equation possesses the following solitary wave solution
and
The error and convergence rate of the numerical solutions with respect to the exact velocity v and density are defined as follows:
First, we verify that the proposed scheme can achieve second-order convergence in time and fourth-order convergence in space. To do so, we obtain the errors between the numerical and exact solution at with various time and space steps. The convergence rates and CPU times determined by both the nonlinear scheme in [16] and the proposed scheme are summarized in Table 1 and Table 2. From the results presented the tables, we can see that: (i) the errors provided by the proposed scheme are nearly identical to those obtained from the nonlinear scheme; (ii) Both schemes exhibit approximately second-order convergence in time when and fourth-order convergence in space when . These results verify the analysis results stated in Theorem 3; however, (iii) The proposed scheme is significantly more cost-effective than the nonlinear scheme. In other words, the CPU time required by the proposed scheme is approximately half that needed by the nonlinear scheme. The results in Table 1 and Table 2 clearly demonstrate that a significant improvement has been achieved by proposed scheme compared to the nonlinear scheme in [16].
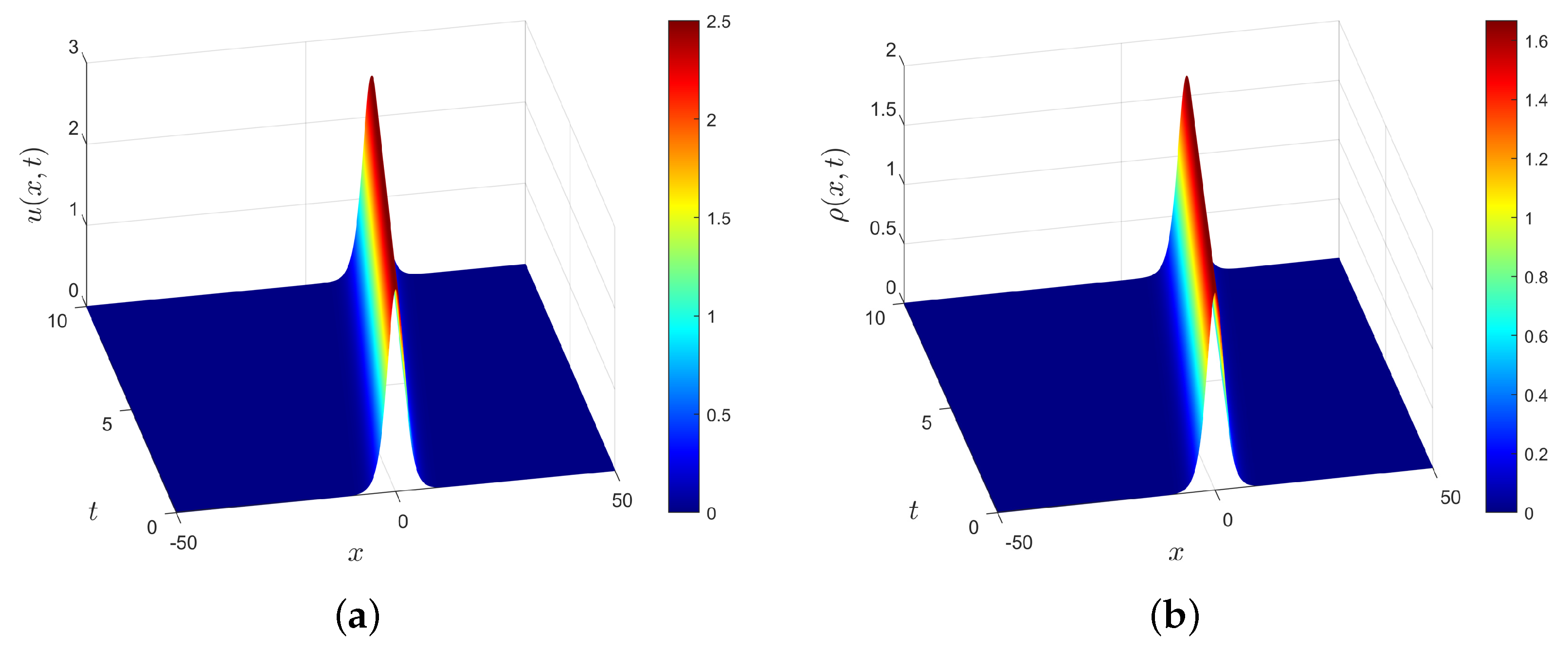
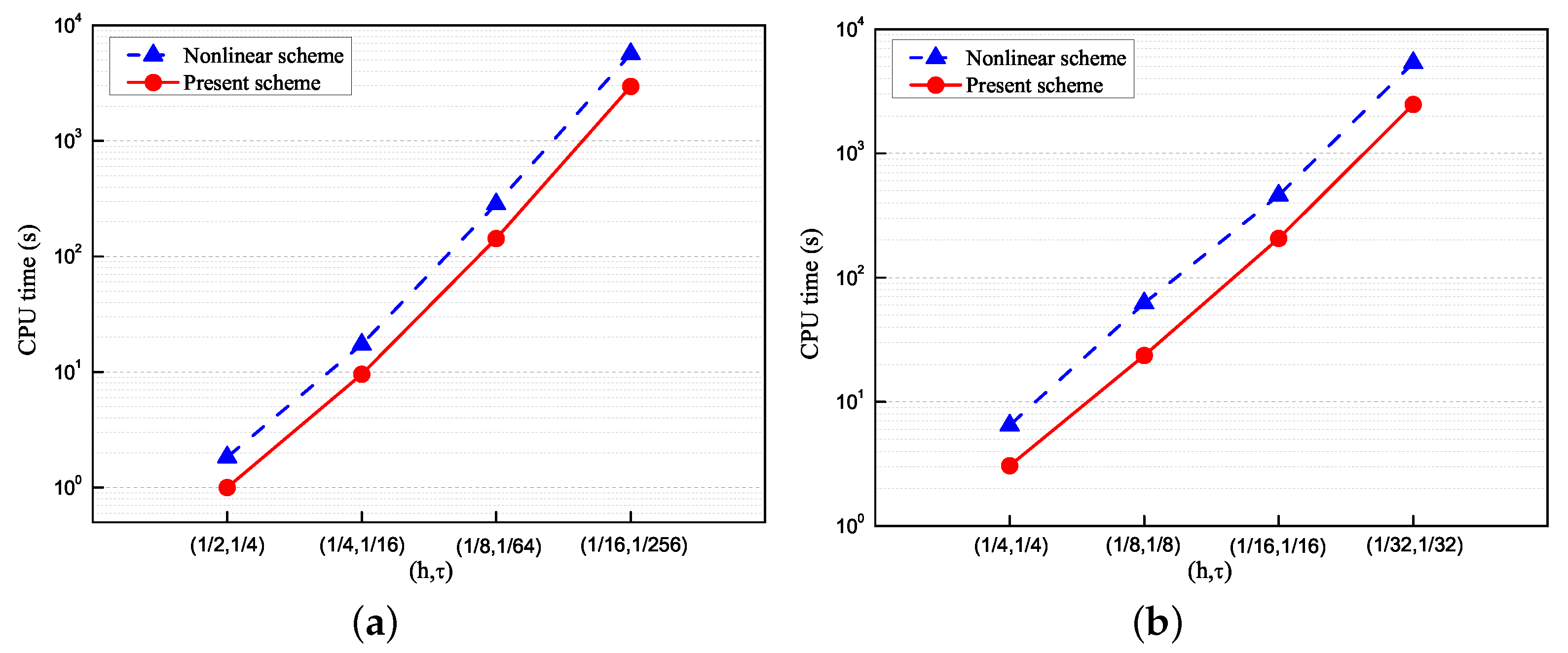
The three-dimensional plots of the numerical solutions of and for problem (1) using the proposed scheme by taking and are presented in Figure 1. These visualizations provide insights into the evolution of wave propagation over the time interval . Additionally, Figure 2 shows the exact and numerical solutions of and with and at obtained from the proposed scheme. A comparison clearly illustrates a remarkable agreement between our numerical solutions and the exact solution. Moreover, Figure 3 displays the computational times (CPU times) required by the nonlinear scheme in [16] and the proposed scheme for different choices of and . Notably, our proposed scheme demonstrates a large reduction in computation time. In conclusion, in contrast to the nonlinear method presented in [16], the proposed scheme not only preserves nearly the same accuracy and convergence rate as the nonlinear scheme but also substantially decreases the CPU time needed to obtain numerical solutions.
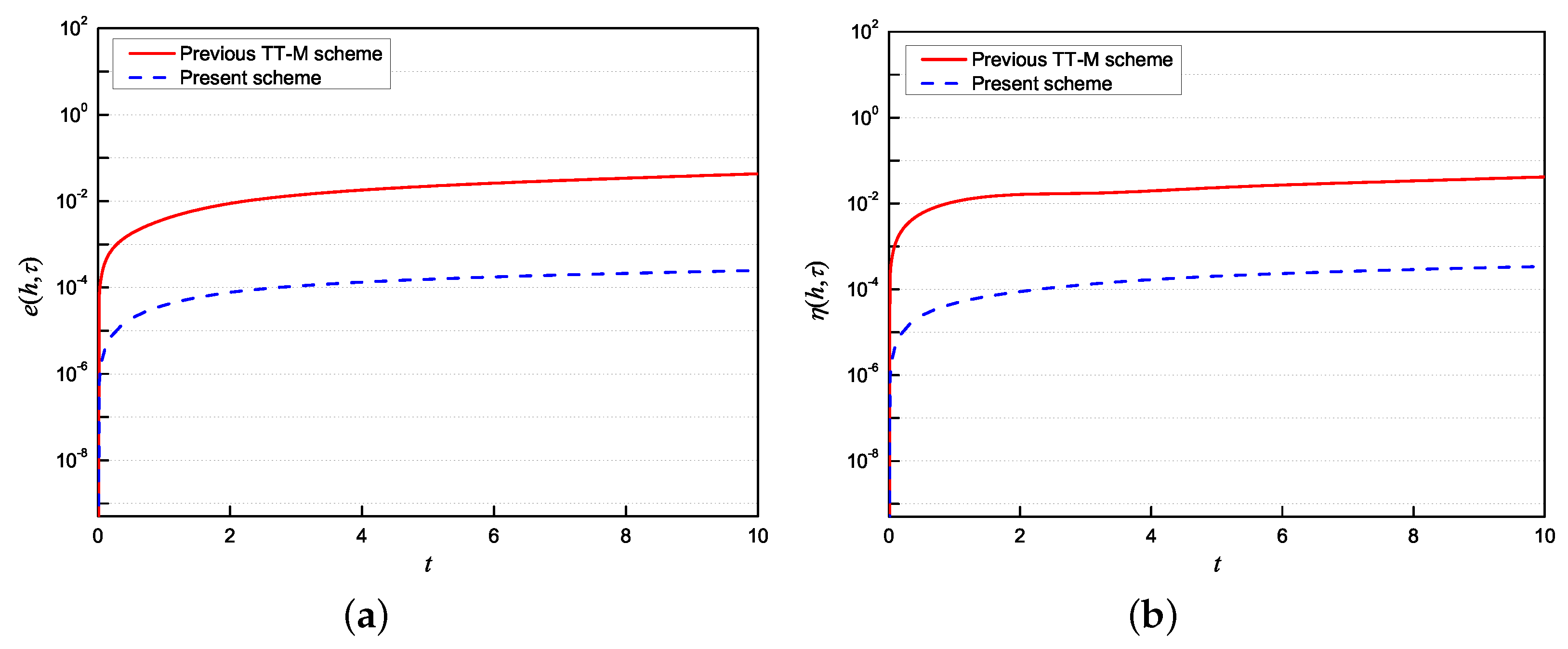
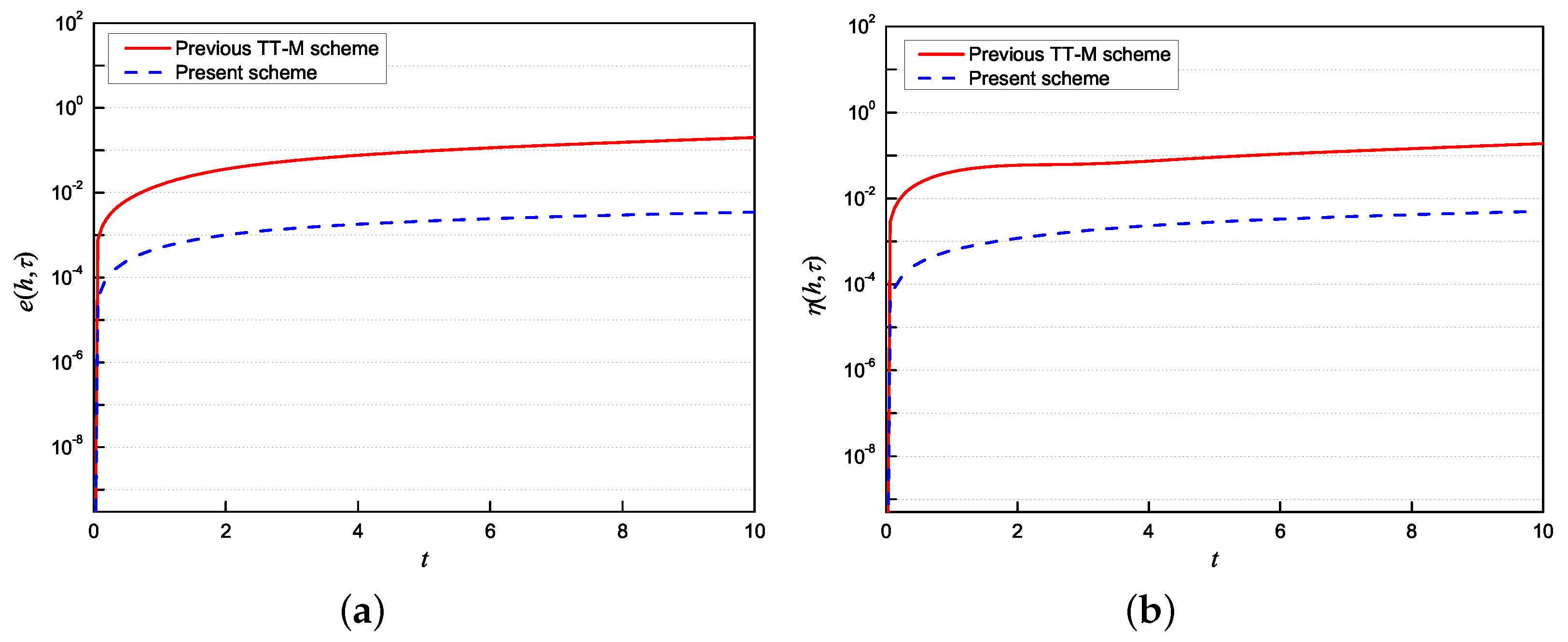
Next, we compare the accuracy of two schemes for the SRLW equation: the previous TT-M scheme in [27] and the proposed scheme. The former scheme exhibits first-order convergence in time and second-order convergence in space. Under the same temporal and spatial domain conditions as in this article, we use the previous TT-M scheme to calculate the errors of and as well as the CPU time for different time and space steps. The resulting data are presented in Table 3. By comparing the errors and CPU times presented in Table 1, Table 2 and Table 3, it is evident that the proposed scheme exhibits significantly lower CPU time requirements compared to that of the previous TT-M scheme under similar error value. This indicates that the computational efficiency of the proposed scheme is higher than that of the previous TT-M scheme. Figure 4 and Figure 5 illustrate the error comparison between the two methods with and , respectively. The results show that the errors in numerical solutions of and obtained from the proposed scheme are considerably smaller than the errors provided by the previous TT-M scheme, which implies that our proposed method has superior accuracy than the previous TT-M scheme for solving the SRLW equation.
Furthermore, based on Table 1, Table 2 and Table 3, we present the errors of and versus the CPU time using the three numerical schemes (i.e., nonlinear scheme, previous TT-M scheme and proposed scheme) in Figure 6. Figure 6 plots the errors versus the CPU time under and , respectively. From the figure, one can see that the cost of the previous TT-M scheme is the most expensive; the cost of the proposed scheme is the cheapest; and the cost of the nonlinear scheme is more expensive than that provided by the proposed scheme.
Next, we consider the three conservation laws of the SRLW Equation (1), namely:
Subsequently, by utilizing discretized formulations, we are able to evaluate three approximate conservative quantities as follows:
where
The values of these three quantities under different time and spatial steps are recorded in Table 4, Table 5 and Table 6. Table 4 and Table 5 demonstrate that the discrete masses and remain well-preserved at various times, regardless of the time and space steps. From the results presented in Table 6, for the case where the grid spacing is and the time step is , it can be observed that the discrete energy E undergoes a slight change over time. However, as the spatial and temporal step sizes become smaller, the tables show that our proposed scheme preserves the two discrete masses well and almost maintains discrete energy when the time and space steps are made smaller.
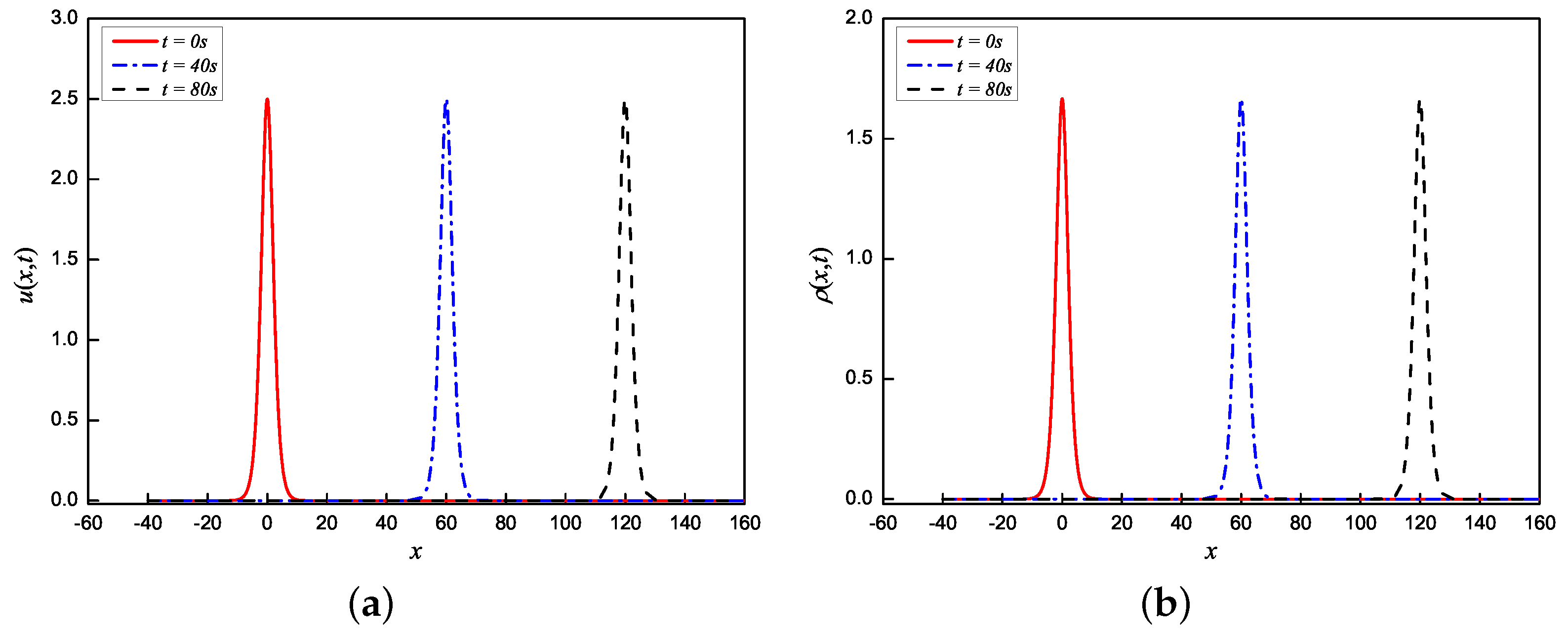
Finally, we present the long-time behavior of the and using the proposed scheme with the parameter . The waveforms of and at , and 80 obtained from the present scheme are illustrated in Figure 7. From the figure, it is evident that the waveforms at three different time instances are nearly identical. This observation strongly indicates the high accuracy of our proposed scheme. The long-time errors in and over the time interval are presented in Figure 8. Although the errors of the proposed scheme increase over time, the rate of growth is relatively slow, which also indicates the high effectiveness of the proposed scheme.
6. Conclusions
In this paper, based on a two-level time-mesh technique, a novel finite difference scheme with a second-order convergence rate in time and a fourth-order convergence rate in space is developed for effectively solving the SRLW Equation (Equation (1)). The proposed scheme is nonlinear on the coarse time-mesh and linear on the fine time-mesh to make it easier to implement. The proposed scheme offers several advantages over existing methods, including improved efficiency and accuracy. We performed a convergence and stability analysis of the proposed scheme; compared to the nonlinear scheme in [16], the proposed scheme not only maintains the same errors and convergence rates as the nonlinear scheme but can also save in computational time, which makes the proposed scheme a valuable tool for practical applications. Moreover, a comparison of the errors obtained using the previous TT-M difference scheme in [27] and the proposed scheme is presented. The results indicate that our proposed scheme exhibits significantly smaller errors than the previous TT-M scheme. The higher accuracy of our scheme ensures stable and reliable solutions throughout the simulation. We also plotted the errors against the CPU time for three methods and found that our proposed scheme is the cheapest of the three schemes in the comparison in terms of CPU time. Finally, the discrete conservation laws were investigated and the long-time simulations that demonstrate the waveform’s preservation were conducted to illustrate the effectiveness of the proposed scheme. Overall, the proposed numerical scheme for the SRLW equation is more accurate and efficient than other earlier schemes in the literature. The new difference scheme presents an important advancement in numerical methods for solving the SRLW equation. However, as shown in Figure 8, one of the shortcomings of our scheme is that the error will become large over a very long simulation time. This will be addressed and enhanced through the use of alternative methods in our future work.
Author Contributions
Conceptualization, J.G.; methodology, J.G.; software, J.G. and S.H.; validation, S.H., Q.B. and E.B.; formal analysis, J.G. and S.H.; writing—original draft preparation, J.G.; writing—review and editing, J.G. and S.H.; funding acquisition, S.H., Q.B. and E.B. All authors have read and agreed to the published version of the manuscript.
Funding
Basic Scientific Research Funds of Subordinate Universities of Inner Mongolia (No. ZSLJ202213).
Data Availability Statement
All data were computed using our method.
Acknowledgments
We are grateful to the anonymous reviewers for their valuable suggestions and comments.
Conflicts of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Xu, F. Application of Exp-function method to symmetric regularized long wave (SRLW) equation. Phys. Lett. A2008, 372, 252–257. [Google Scholar] [CrossRef]
Abazari, R. Application of (G′/G)-expansion method to travelling wave solutions of three nonlinear evolution equation. Comput. Fluids2010, 39, 1957–1963. [Google Scholar] [CrossRef]
Hussain, A.; Jhangeer, A.; Abbas, N.; Khan, I.; Nisar, K.S. Solitary wave patterns and conservation laws of fourth-order nonlinear symmetric regularized long-wave equation arising in plasma. Ain Shams Eng. J.2021, 12, 3919–3930. [Google Scholar] [CrossRef]
Manafian, J.; Zamanpour, I. Exact travelling wave solutions of the symmetric regularized long wave (SRLW) using analytical methods. Stat. Optim. Inf. Comput.2014, 2014, 47–55. [Google Scholar]
Bekir, A. New solitons and periodic wave solutions for some nonlinear physical models by using the sine–cosine method. Phys. Scr.2008, 77, 045008. [Google Scholar] [CrossRef]
Guo, B. The spectral method for symmetric regularized wave equations. J. Comput. Math.1987, 5, 297–306. [Google Scholar]
Zheng, J.; Zhang, R.; Guo, B. The Fourier pseudo-spectral method for the SRLW equation. Appl. Math. Mech.1989, 10, 801–810. [Google Scholar]
Shang, Y.; Guo, B. Analysis of chebyshev pseudospectral method for multi-dimentional generalized SRLW equations. Appl. Math. Mech.2003, 24, 1035–1048. [Google Scholar]
Fang, S.; Guo, B.; Qiu, H. The existence of global attractors for a system of multi-dimensional symmetric regularized wave equations. Commun. Nonlinear Sci. Numer. Simul.2009, 14, 61–68. [Google Scholar]
Wang, T.C.; Zhang, L.M.; Chen, F.Q. Conservative schemes for the symmetric regularized long wave equations. Appl. Math. Comput.2007, 190, 1063–1080. [Google Scholar] [CrossRef]
Bai, Y.; Zhang, L.M. A conservative finite difference scheme for symmetric regularized long wave equations. Acta Math. Appl. Sin.2007, 30, 248–255. [Google Scholar]
Xu, Y.C.; Hu, B.; Xie, X.P.; Hu, J.S. Mixed finite element analysis for dissipative SRLW equations with damping term. Phys. Fluids2012, 218, 4788–4797. [Google Scholar] [CrossRef]
Yimnet, S.; Wongsaijai, B.; Rojsiraphisal, T.; Poochinapan, K. Numerical implementation for solving the symmetric regularized long wave equation. Appl. Math. Comput.2016, 273, 809–825. [Google Scholar] [CrossRef]
Nie, T. A decoupled and conservative difference scheme with fourth-order accuracy for the symmetric regularized long wave equations. Appl. Math. Comput.2013, 219, 9461–9468. [Google Scholar] [CrossRef]
Hu, J.; Zheng, K.; Zheng, M. Numerical simulation and convergence analysis of a high-order conservative difference scheme for SRLW equation. Appl. Math. Model.2014, 38, 5573–5581. [Google Scholar] [CrossRef]
Kerdboon, J.; Yimnet, S.; Wongsaijai, B.; Mouktonglang, T.; Poochinapan, K. Convergence analysis of the higher-order global mass-preserving numerical method for the symmetric regularized longwave equation. Int. J. Comput. Math.2021, 98, 27. [Google Scholar] [CrossRef]
He, Y.Y.; Wang, X.F.; Cheng, H.; Deng, Y.Q. Numerical analysis of a high-order accurate compact finite difference scheme for the SRLW equation. Appl. Math. Comput.2022, 418, 126837. [Google Scholar] [CrossRef]
Li, S.G. Numerical study of a conservative weighted compact difference scheme for the symmetric regularized long wave equations. Numer. Methods Partial. Differ. Equ.2018, 35, 60–83. [Google Scholar] [CrossRef]
He, Y.Y.; Wang, X.F.; Zhong, R.H. New linearized fourth-order conservative compact difference scheme for the SRLW equations. Adv. Comput. Math.2022, 48, 27. [Google Scholar] [CrossRef]
Liu, Y.; Yu, Z.D.; Li, H.; Liu, F.W.; Wang, J.F. Time two-mesh algorithm combined with finite element method for time fractional water wave model. Int. J. Heat Mass Transf.2018, 120, 1132–1145. [Google Scholar] [CrossRef]
Yin, B.L.; Liu, Y.; Li, H.; He, S. Fast algorithm based on TT-M FE system for space fractional Allen-Cahn equations with smooth and non-smooth solutions. J. Comput. Phys.2019, 379, 351–372. [Google Scholar] [CrossRef]
Qiu, W.L.; Xu, D.; Guo, J.; Zhou, J. A time two-grid algorithm based on finite difference method for the two-dimensional nonlinear time-fractional mobile/immobile transport model. Numer. Algorithms2020, 85, 39–58. [Google Scholar] [CrossRef]
Xu, D.; Guo, J.; Qiu, W.L. Time two-grid algorithm based on finite difference method for two-dimensional nonlinear fractional evolution equations. Appl. Numer. Math.2019, 152, 169–184. [Google Scholar] [CrossRef]
Niu, Y.X.; Liu, Y.; Li, H.; Liu, F.W. Fast high-order compact difference scheme for the nonlinear distributed-order fractional Sobolev model appearing in porous media. Math. Comput. Simul.2023, 203, 387–407. [Google Scholar] [CrossRef]
He, S.; Liu, Y.; Li, H. A time two-mesh compact difference method for the one-dimensional nonlinear schrödinger equation. Entropy2022, 24, 806. [Google Scholar] [CrossRef] [PubMed]
Gao, J.Y.; He, S.; Bai, Q.M.; Liu, J. A Time Two-Mesh Finite Difference Numerical Scheme for the Symmetric Regularized Long Wave Equation. Fractal Fract.2023, 7, 487. [Google Scholar] [CrossRef]
Zhou, Y.L. Application of Discrete Functional Analysis to the Finite Difference Method; International Academic Publishers: Beijing, China, 1990. [Google Scholar]
Figure 1.
Three−dimensional plots of (a) and (b) with .
Figure 1.
Three−dimensional plots of (a) and (b) with .
Figure 2.
Exact and numerical solution of (a) and (b) at with .
Figure 2.
Exact and numerical solution of (a) and (b) at with .
Figure 3.
Comparison of CPU times with (a) and (b).
Figure 3.
Comparison of CPU times with (a) and (b).
Figure 4.
Comparison of (a) and (b) with .
Figure 4.
Comparison of (a) and (b) with .
Figure 5.
Comparison of (a) and (b) with .
Figure 5.
Comparison of (a) and (b) with .
Figure 6.
The numerical error versus the CPU time using the three different numerical schemes with (a) and (b).
Figure 6.
The numerical error versus the CPU time using the three different numerical schemes with (a) and (b).
Figure 7.
Long−time behavior of (a) and (b) under mesh steps with .
Figure 7.
Long−time behavior of (a) and (b) under mesh steps with .
Figure 8.
Errors in long-time behavior of and with .
Figure 8.
Errors in long-time behavior of and with .
Table 4.
Discrete mass under different mesh steps h and at various times.
Table 4.
Discrete mass under different mesh steps h and at various times.
Present Scheme
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078649
13.4164078648
13.4164078648
13.4164078648
13.4164078648
Table 5.
Discrete mass under different mesh steps h and at various times.
Table 5.
Discrete mass under different mesh steps h and at various times.
Present Scheme
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
8.9442719099
Table 6.
Discrete energy E under different mesh steps h and at various times.
Table 6.
Discrete energy E under different mesh steps h and at various times.
Present Scheme
34.7628720201
34.7781529556
34.7819964190
34.7829587447
34.7647712611
34.7781634038
34.7819965109
34.7829587460
34.7537001446
34.7780876049
34.7819962655
34.7829587461
34.7185711285
34.7778355542
34.7819952701
34.7829587428
34.6591320134
34.7773916731
34.7819934746
34.7829587360
34.5775373861
34.7767645581
34.7819909256
34.7829587262
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
Gao, J.; Bai, Q.; He, S.; Buhe, E.
New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms2023, 12, 1057.
https://doi.org/10.3390/axioms12111057
AMA Style
Gao J, Bai Q, He S, Buhe E.
New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms. 2023; 12(11):1057.
https://doi.org/10.3390/axioms12111057
Chicago/Turabian Style
Gao, Jingying, Qingmei Bai, Siriguleng He, and Eerdun Buhe.
2023. "New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation" Axioms 12, no. 11: 1057.
https://doi.org/10.3390/axioms12111057
APA Style
Gao, J., Bai, Q., He, S., & Buhe, E.
(2023). New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms, 12(11), 1057.
https://doi.org/10.3390/axioms12111057
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Gao, J.; Bai, Q.; He, S.; Buhe, E.
New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms2023, 12, 1057.
https://doi.org/10.3390/axioms12111057
AMA Style
Gao J, Bai Q, He S, Buhe E.
New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms. 2023; 12(11):1057.
https://doi.org/10.3390/axioms12111057
Chicago/Turabian Style
Gao, Jingying, Qingmei Bai, Siriguleng He, and Eerdun Buhe.
2023. "New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation" Axioms 12, no. 11: 1057.
https://doi.org/10.3390/axioms12111057
APA Style
Gao, J., Bai, Q., He, S., & Buhe, E.
(2023). New Two-Level Time-Mesh Difference Scheme for the Symmetric Regularized Long Wave Equation. Axioms, 12(11), 1057.
https://doi.org/10.3390/axioms12111057
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}