
Reliability-Based Design Optimization of Structures Considering Uncertainties of Earthquakes Based on Efficient Gaussian Process Regression Metamodeling


Abstract
:1. Introduction
2. RBDO Problem and EGO-EGRA Approach
2.1. RBDO Formulation
2.2. Efficient Global Optimization
2.3. EGO-EGRA Approach
3. Proposed RBDO Method for Structures Subjected to Earthquakes
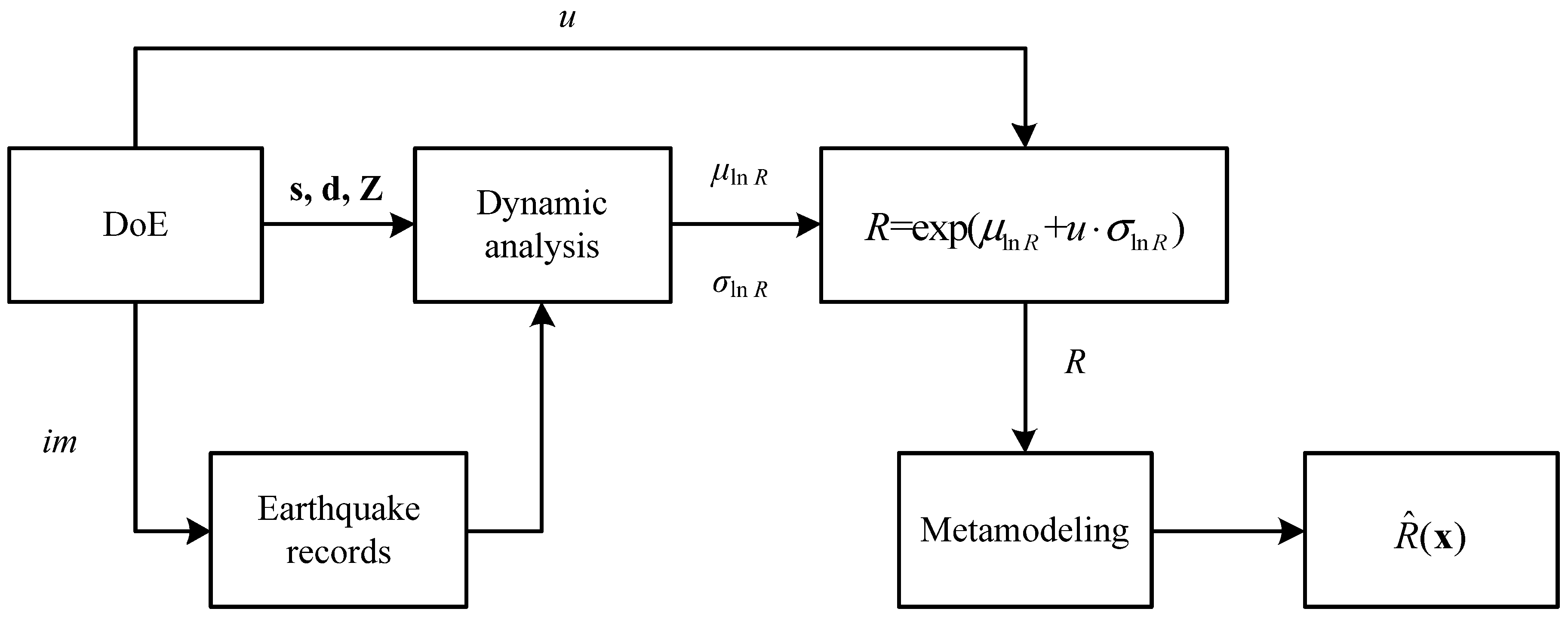
3.1. Metamodel of the EDP
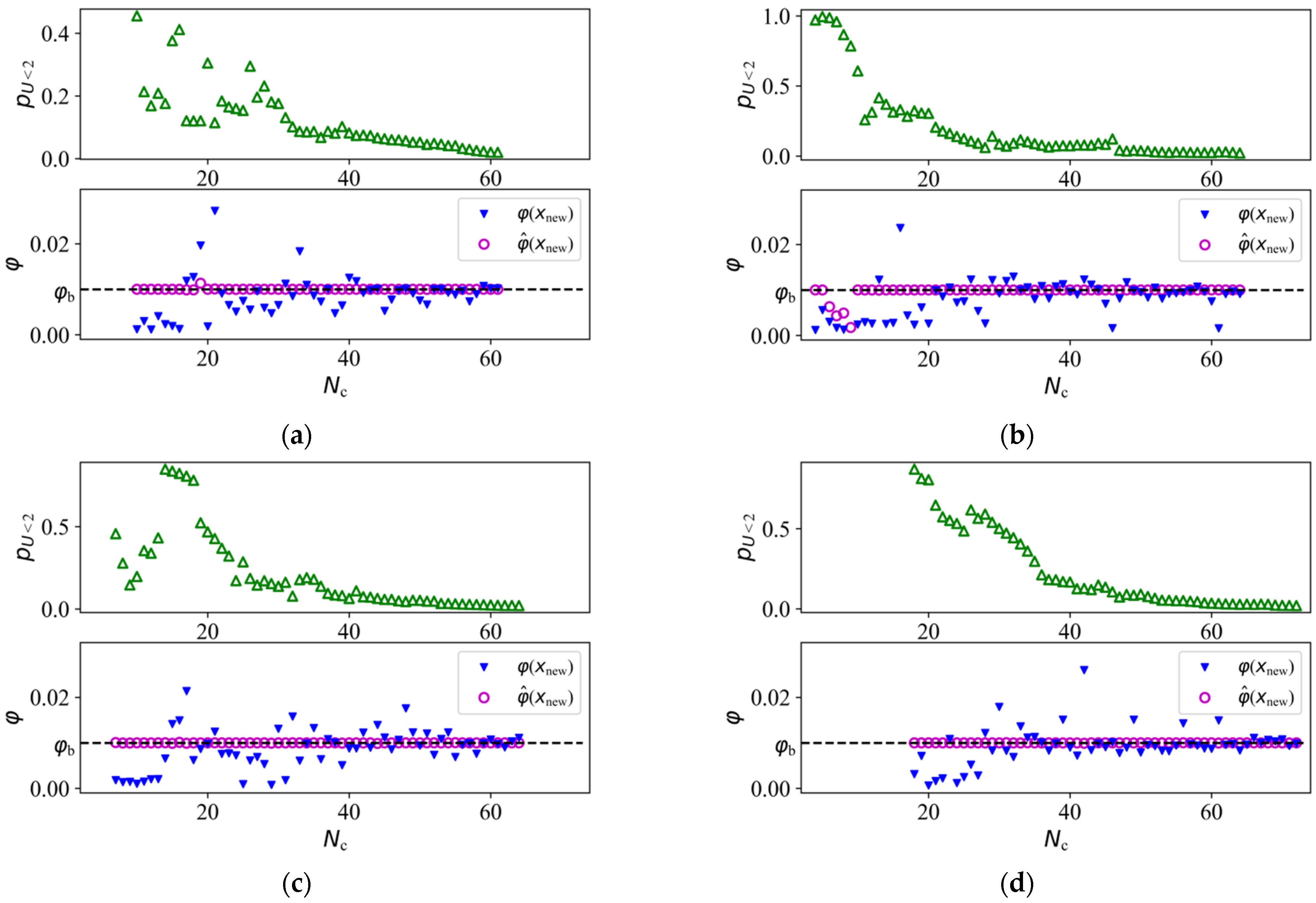
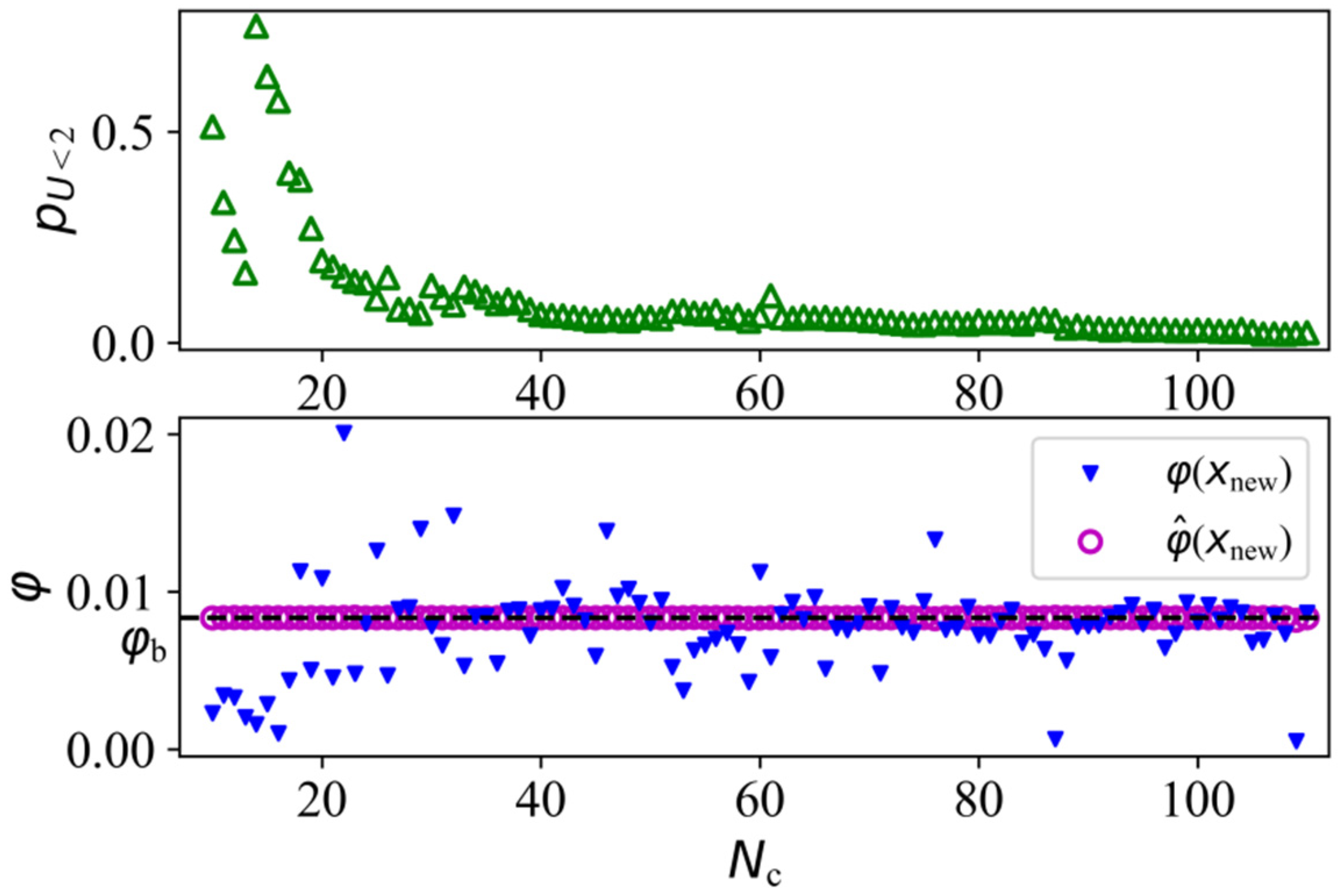
3.2. Refinement of the Metamodel
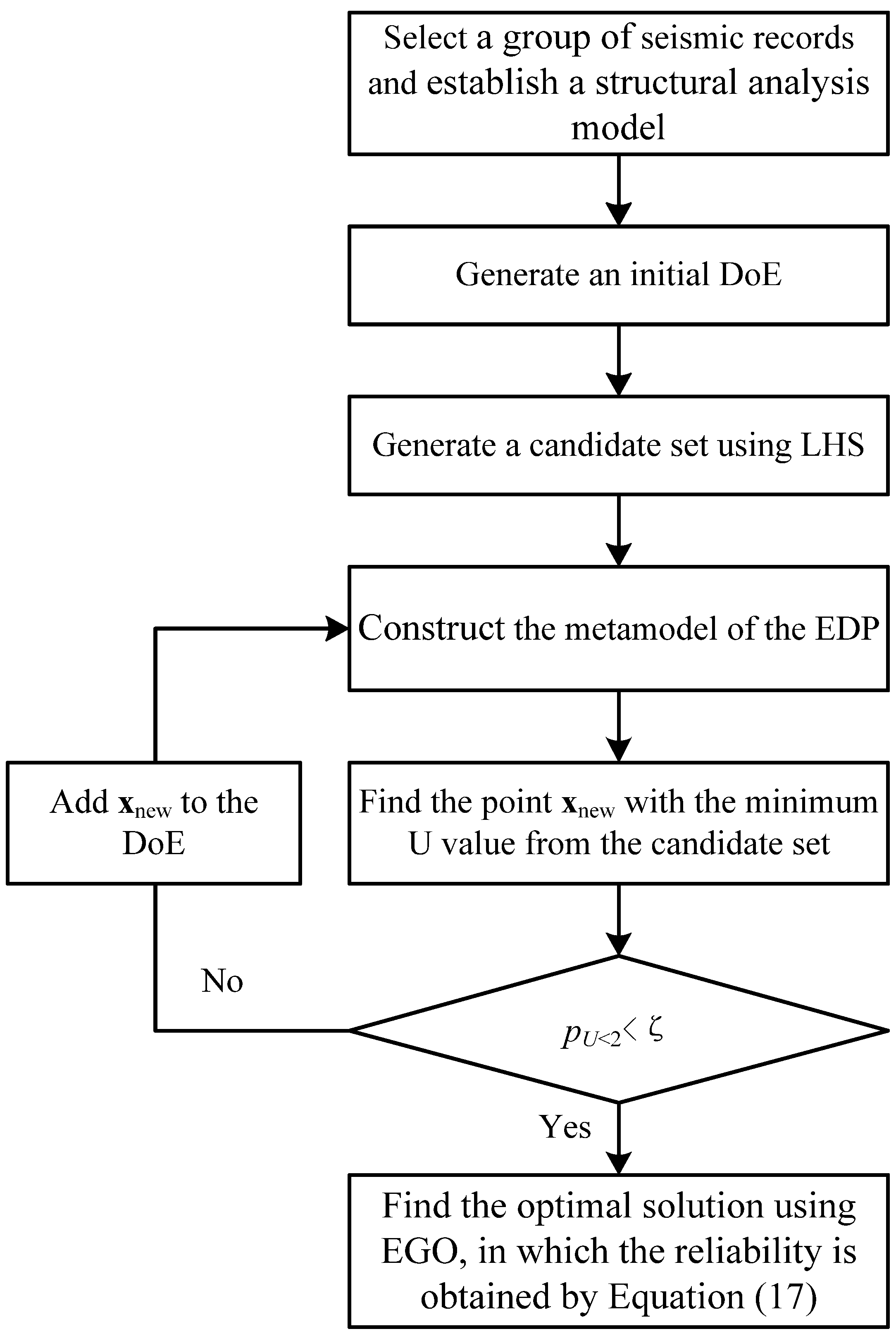
3.3. Computational Procedure of RBDO
- (1)
- Select a group of seismic records and establish a structural analysis model.
- (2)
- Generate an initial DoE: sample ns (e.g., the number of the input variables) initial experiments in the space of x = [d, Z, P] by LHS, perform NLTHA for all selected records at each sample, and calculate the seismic demand according to Formula (16).
- (3)
- In terms of Formula (18), use LHS to choose a candidate set containing r points (r = 10,000 in this research).
- (4)
- Construct the GPR model of EDP with DoE.
- (5)
- Pick the point with the minimum value of U function from the candidate set according to Formula (20). If < ζ (ζ is taken as 0.02), proceed to step (6); otherwise, add the new sample with its seismic demand to the DoE, and return to step (4).
- (6)
- By Formula (17), transform RBDO problems (1) or (2) into the form in Formulas (8) or (9) and search for the optimal solution using the EGO algorithm.
4. Numerical Studies
4.1. Example 1: A Steel Frame
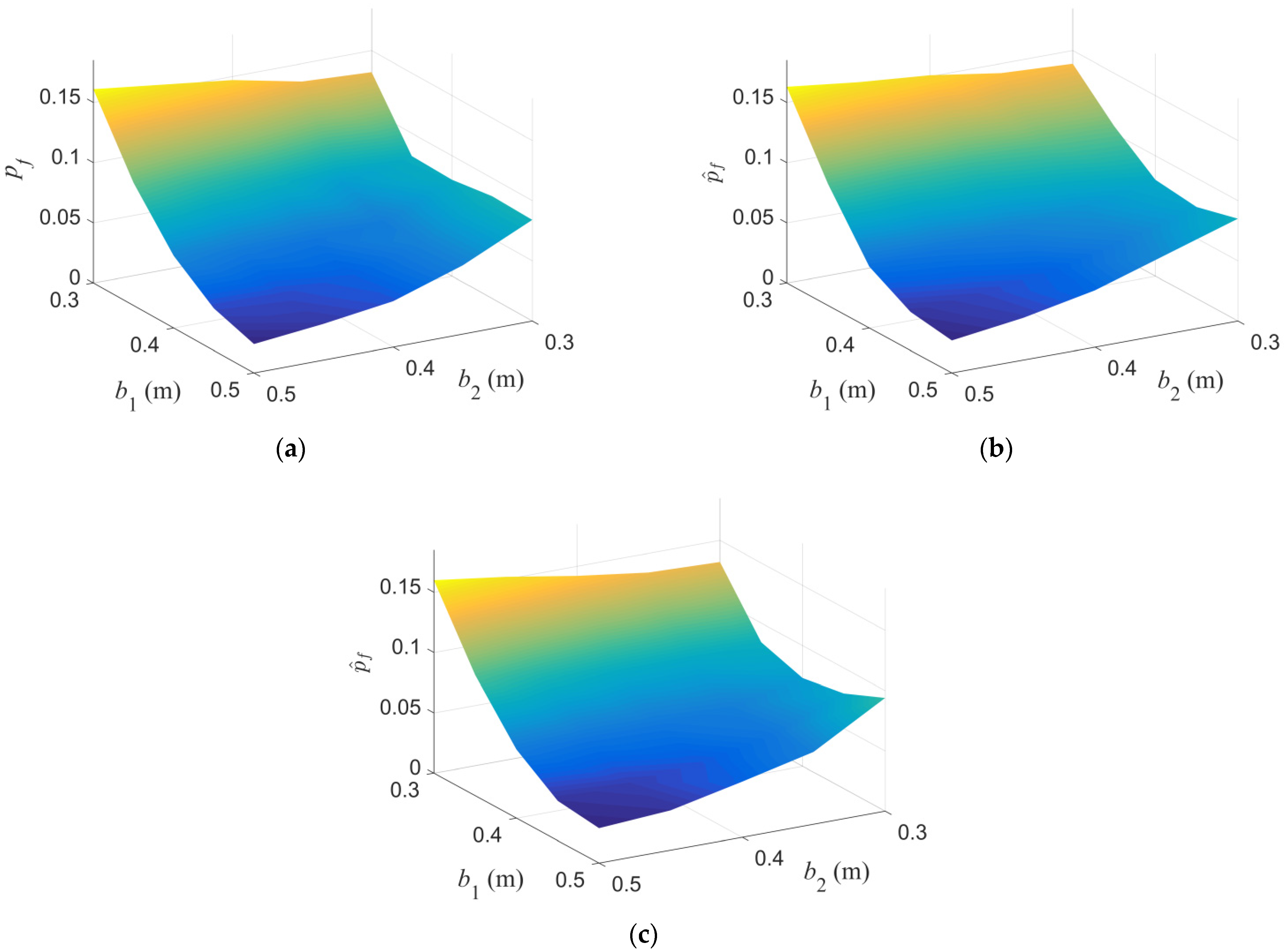
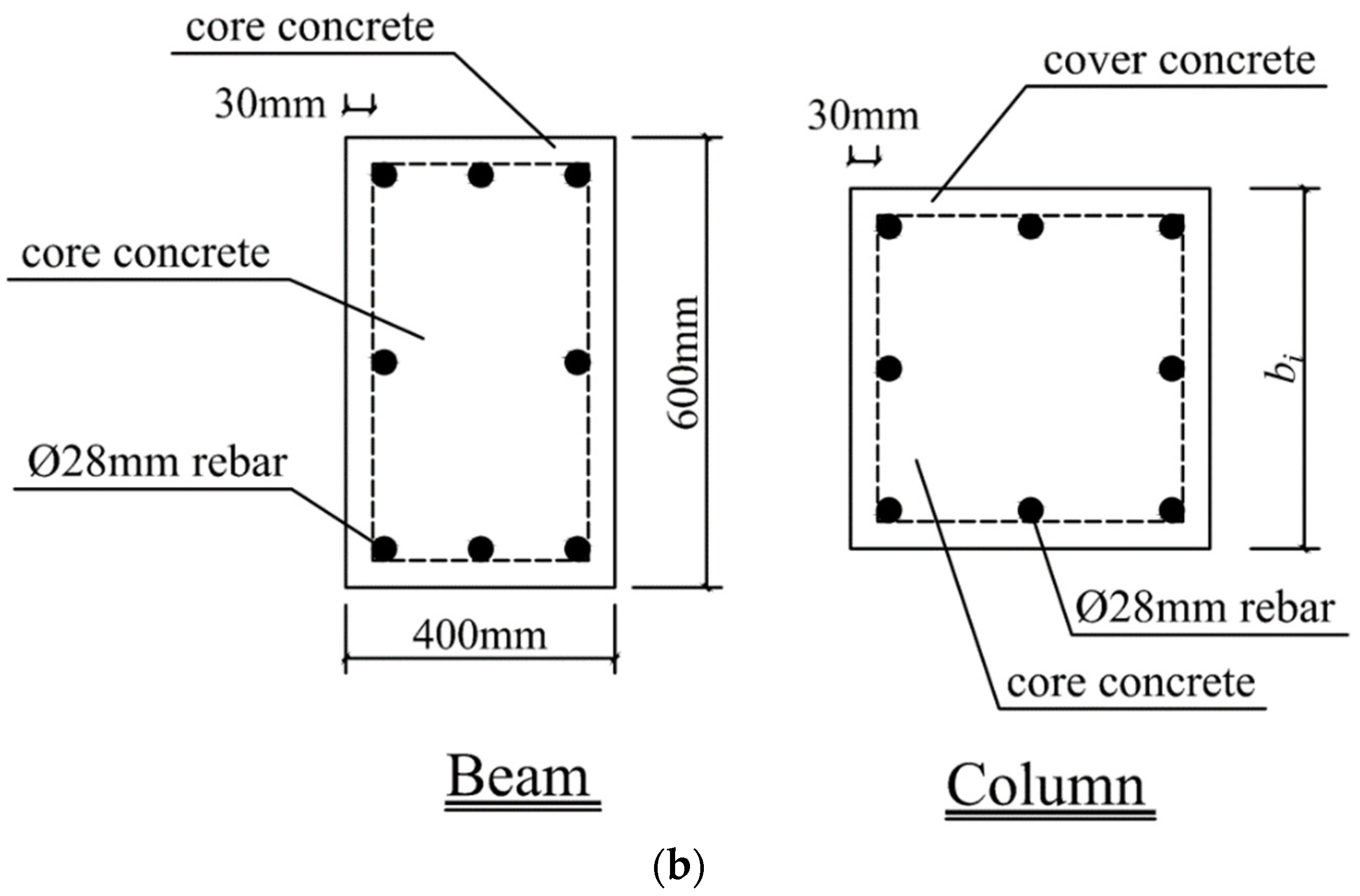
4.2. Example 2: A Reinforced Concrete Frame
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- FEMA-356; Prestandard and Commentary for the Seismic Rehabilitation of Buildings. Federal Emergency Management Agency: Washington, DC, USA, 2000.
- Ni, P.; Li, J.; Hao, H.; Yan, W.; Du, X.; Zhou, H. Reliability analysis and design optimization of nonlinear structures. Reliab. Eng. Syst. Saf. 2020, 198, 106860. [Google Scholar] [CrossRef]
- Yazdani, H.; Khatibinia, M.; Gharehbaghi, S.; Hatami, K. Probabilistic performance-based optimum seismic design of RC structures considering soil–structure interaction effects. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2017, 3, G4016004. [Google Scholar] [CrossRef]
- Zou, X.; Wang, Q.; Wu, J. Reliability-based performance design optimization for seismic retrofit of reinforced concrete buildings with fiber-reinforced polymer composites. Adv. Struct. Eng. 2018, 21, 838–851. [Google Scholar] [CrossRef]
- Mishra, S.K.; Roy, B.K.; Chakraborty, S. Reliability-based-design-optimization of base isolated buildings considering stochastic system parameters subjected to random earthquakes. Int. J. Mech. Sci. 2013, 75, 123–133. [Google Scholar] [CrossRef]
- Hadidi, A.; Azar, B.F.; Rafiee, A. Reliability-based design of semi-rigidly connected base-isolated buildings subjected to stochastic near-fault excitations. Earthq. Struct. 2016, 11, 701–721. [Google Scholar] [CrossRef]
- Peng, Y.; Ma, Y.; Huang, T.; De Domenico, D. Reliability-based design optimization of adaptive sliding base isolation system for improving seismic performance of structures. Reliab. Eng. Syst. Saf. 2021, 205, 107167. [Google Scholar] [CrossRef]
- FEMA P695; Quantification of Building Seismic Performance Factors. Federal Emergency Management Agency: Washington, DC, USA, 2009.
- Su, L.; Li, X.L.; Jiang, Y.P. Comparison of methodologies for seismic fragility analysis of unreinforced masonry buildings considering epistemic uncertainty. Eng. Struct. 2020, 205, 110059. [Google Scholar] [CrossRef]
- Dolsek, M. Incremental dynamic analysis with consideration of modeling uncertainties. Earthq. Eng. Struct. Dyn. 2009, 38, 805–825. [Google Scholar] [CrossRef]
- Perotti, F.; Domaneschi, M.; De Grandis, S. The numerical computation of seismic fragility of base-isolated nuclear power plants buildings. Nucl. Eng. Des. 2013, 262, 189–200. [Google Scholar] [CrossRef]
- Lagaros, N.D.; Fragiadakis, M. Fragility assessment of steel frames using neural networks. Earthq. Spectra 2007, 23, 735–752. [Google Scholar] [CrossRef]
- Khatibinia, M.; Salajegheh, E.; Salajegheh, J.; Fadaee, M.J. Reliability-based design optimization of reinforced concrete structures including soil–structure interaction using a discrete gravitational search algorithm and a proposed metamodel. Eng. Optim. 2013, 45, 1147–1165. [Google Scholar] [CrossRef]
- Pang, Y.; Dang, X.; Yuan, W. An artificial neural network based method for seismic fragility analysis of highway bridges. Adv. Struct. Eng. 2014, 17, 413–428. [Google Scholar] [CrossRef]
- Towashiraporn, P. Building Seismic Fragilities Using Response Surface Metamodels. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, CA, USA, 2004. [Google Scholar]
- Park, J.; Towashiraporn, P. Rapid seismic damage assessment of railway bridges using the response-surface statistical model. Struct. Saf. 2014, 47, 1–12. [Google Scholar] [CrossRef]
- Saha, S.K.; Matsagar, V.; Chakraborty, S. Uncertainty quantification and seismic fragility of base-isolated liquid storage tanks using response surface models. Probabilistic Eng. Mech. 2016, 43, 20–35. [Google Scholar] [CrossRef]
- Ghosh, S.; Ghosh, S.; Chakraborty, S. Seismic reliability analysis of reinforced concrete bridge pier using efficient response surface method–based simulation. Adv. Struct. Eng. 2018, 21, 2326–2339. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, G. Seismic vulnerability analysis of RC bridges based on Kriging model. J. Earthq. Eng. 2019, 23, 242–260. [Google Scholar] [CrossRef]
- Xiao, Y.; Ye, K.; He, W. An improved response surface method for fragility analysis of base-isolated structures considering the correlation of seismic demands on structural components. Bull. Earthq. Eng. 2020, 18, 4039–4059. [Google Scholar] [CrossRef]
- Datta, G.; Bhattacharjya, S.; Chakraborty, S. Efficient reliability-based robust design optimization of structures under extreme wind in dual response surface framework. Struct. Multidiscip. Optim. 2020, 62, 2711–2730. [Google Scholar] [CrossRef]
- Liu, H.; Ong, Y.S.; Cai, J. A survey of adaptive sampling for global metamodeling in support of simulation-based complex engineering design. Struct. Multidiscip. Optim. 2018, 57, 393–416. [Google Scholar] [CrossRef]
- Zhuang, X.; Pan, R. A sequential sampling strategy to improve reliability-based design optimization with implicit constraint functions. J. Mech. Des. 2012, 134, 021002. [Google Scholar] [CrossRef]
- Bichon, B.J.; Eldred, M.S.; Mahadevan, S.; McFarland, J.M. Efficient global surrogate modeling for reliability-based design optimization. J. Mech. Des. 2013, 135, 011009. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, H.; Gao, L.; Li, X.; Li, P. A local adaptive sampling method for reliability-based design optimization using Kriging model. Struct. Multidiscip. Optim. 2014, 49, 401–416. [Google Scholar] [CrossRef]
- Meng, Z.; Zhang, Z.; Zhang, D.; Yang, D. An active learning method combining Kriging and accelerated chaotic single loop approach (AK-ACSLA) for reliability-based design optimization. Comput. Methods Appl. Mech. Eng. 2019, 357, 112570. [Google Scholar] [CrossRef]
- Li, G.; Yang, H.; Zhao, G. A new efficient decoupled reliability-based design optimization method with quantiles. Struct. Multidiscip. Optim. 2020, 61, 635–647. [Google Scholar] [CrossRef]
- Wang, C.; Qiu, Z. Improved numerical prediction and reliability-based optimization of transient heat conduction problem with interval parameters. Struct. Multidiscip. Optim. 2015, 51, 113–123. [Google Scholar] [CrossRef]
- Wang, C.; Qiu, Z.; Xu, M.; Li, Y. Novel numerical methods for reliability analysis and optimization in engineering fuzzy heat conduction problem. Struct. Multidiscip. Optim. 2017, 56, 1247–1257. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, H.; Gao, L.; Li, P. An optimal shifting vector approach for efficient probabilistic design. Struct. Multidiscip. Optim. 2013, 47, 905–920. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Qian, J.; Cheng, Y.; Zhang, J.; Liu, J.; Zhan, D. A parallel constrained efficient global optimization algorithm for expensive constrained optimization problems. Eng. Optim. 2021, 53, 300–320. [Google Scholar] [CrossRef]
- Lv, Z.; Lu, Z.; Wang, P. A new learning function for Kriging and its applications to solve reliability problems in engineering. Comput. Math. Appl. 2015, 70, 1182–1197. [Google Scholar] [CrossRef]
- Vamvatsikos, D.; Cornell, C.A. Incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 2002, 31, 491–514. [Google Scholar] [CrossRef]
- Lagaros, N.D.; Papadrakakis, M. Robust seismic design optimization of steel structures. Struct. Multidiscip. Optim. 2007, 33, 457–469. [Google Scholar] [CrossRef]
- Pozzi, M.; Wang, Q. Gaussian Process Regression and Classification for Probabilistic Damage Assessment of Spatially Distributed Systems. KSCE J. Civ. Eng. 2018, 22, 1016–1026. [Google Scholar] [CrossRef]
- Su, G.; Peng, L.; Hu, L. A Gaussian process-based dynamic surrogate model for complex engineering structural reliability analysis. Struct. Saf. 2017, 68, 97–109. [Google Scholar] [CrossRef]
- Dixon, M.; Ward, T. Information-Corrected Estimation: A Generalization Error Reducing Parameter Estimation Method. Entropy 2021, 23, 1419. [Google Scholar] [CrossRef] [PubMed]
- Šinkovec, H.; Geroldinger, A.; Heinze, G. Bring more data!—A good advice? Removing separation in logistic regression by increasing sample size. Int. J. Environ. Res. Public Health 2019, 16, 4658. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preuss, R.; Von Toussaint, U. Global optimization employing Gaussian process-based Bayesian surrogates. Entropy 2018, 20, 201. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Xiao, Y.J.; Yue, F.; Zhang, X.A.; Shahzad, M.M. Aseismic Optimization of Mega-sub Controlled Structures Based on Gaussian Process Surrogate Model. KSCE J. Civ. Eng. 2022. [Google Scholar] [CrossRef]
- Lelièvre, N.; Beaurepaire, P.; Mattrand, C.; Gayton, N. AK-MCSi: A Kriging-based method to deal with small failure probabilities and time-consuming models. Struct. Saf. 2018, 73, 1–11. [Google Scholar] [CrossRef]
- Yun, W.; Lu, Z.; Zhou, Y.; Jiang, X. AK-SYSi: An improved adaptive Kriging model for system reliability analysis with multiple failure modes by a refined U learning function. Struct. Multidiscip. Optim. 2019, 59, 263–278. [Google Scholar] [CrossRef]
- Forrester, A.; Sobester, A.; Keane, A. Engineering Design via Surrogate Modelling: A Practical Guide; John Wiley & Sons Ltd.: Chichester, UK, 2008. [Google Scholar]
- Jäntschi, L.; Bolboacă, S.D. Computation of probability associated with Anderson–Darling statistic. Mathematics 2018, 6, 88. [Google Scholar] [CrossRef] [Green Version]
- Cornell, C.A. Engineering seismic risk analysis. Bull. Seismol. Soc. Am. 1968, 58, 1583–1606. [Google Scholar] [CrossRef]
- Chen, G.X.; Zhang, K.X.; Xie, J.F. A simple calculation method for site liquefaction risk analysis. Earthq. Resist. Eng. Retrofit. 1992, 1, 26–29. (In Chinese) [Google Scholar] [CrossRef]
- Gao, X.W.; Bao, A.B. Probabilistic model and its statistical parameters for seismic load. Earthq. Eng. Eng. Vib. 1985, 1, 13–22. (In Chinese) [Google Scholar] [CrossRef]
- Chen, G.X.; Zhang, K.X.; Xie, J.F. A Theory Study Reliability on the Ground Aseismic Analysis Method. J. Harbin Univ. Civ. Eng. Archit. 1996, 29, 36–43. (In Chinese) [Google Scholar]
- GB 50011-2010; Code for Seismic Design of Buildings. Ministry of Construction of the People’s Republic of China: Beijing, China, 2010. (In Chinese)
- Wang, X.; Shahzad, M.M.; Shi, X. Research on the disaster prevention mechanism of mega-sub controlled structural system by vulnerability analysis. Structures 2021, 33, 4481–4491. [Google Scholar] [CrossRef]
- Haukaas, T.; Scott, M.H. Shape sensitivities in the reliability analysis of nonlinear frame structures. Comput. Struct. 2006, 84, 964–977. [Google Scholar] [CrossRef]
- Tavakoli, R.; Kamgar, R.; Rahgozar, R. Optimal location of energy dissipation outrigger in high-rise building considering nonlinear soil-structure interaction effects. Period. Polytech. Civ. Eng. 2020, 64, 887–903. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Earthquake Name | Year | Station Name | Arias Intensity (m/s) | Magnitude |
|---|---|---|---|---|---|
| 1 | Cape Mendocino | 1992 | Eureka—Myrtle and West | 0.3 | 7.01 |
| 2 | Cape Mendocino | 1992 | Fortuna—Fortuna Blvd | 0.3 | 7.01 |
| 3 | Landers | 1992 | Yermo Fire Station | 0.9 | 7.28 |
| 4 | Northridge-01 | 1994 | Downey—Co Maint Bldg | 0.6 | 6.69 |
| 5 | Northridge-01 | 1994 | Hollywood—Willoughby Ave | 0.9 | 6.69 |
| 6 | Northridge-01 | 1994 | LA—Baldwin Hills | 0.7 | 6.69 |
| 7 | Northridge-01 | 1994 | Moorpark—Fire Sta | 0.9 | 6.69 |
| 8 | Kocaeli_ Turkey | 1999 | Iznik | 0.4 | 7.51 |
| 9 | Cape Mendocino | 1992 | College of the Redwoods | 0.6 | 7.01 |
| 10 | Chuetsu-oki_ Japan | 2007 | Joetsu Ogataku | 0.7 | 6.8 |
| 11 | Chuetsu-oki_ Japan | 2007 | Sanjo Shinbori | 2 | 6.8 |
| 12 | Chuetsu-oki_ Japan | 2007 | Nakanoshima Nagaoka | 2.1 | 6.8 |
| 13 | Chuetsu-oki_ Japan | 2007 | Yan Sakuramachi City watershed | 0.7 | 6.8 |
| 14 | Iwate_ Japan | 2008 | Kami_ Miyagi Miyazaki City | 0.4 | 6.9 |
| 15 | Iwate_ Japan | 2008 | Matsuyama City | 1.2 | 6.9 |
| 16 | Iwate_ Japan | 2008 | Iwadeyama | 1.8 | 6.9 |
| 17 | Iwate_ Japan | 2008 | Misato_ Miyagi Kitaura—B | 0.7 | 6.9 |
| 18 | Iwate_ Japan | 2008 | Minamikatamachi Tore City | 1.4 | 6.9 |
| 19 | Iwate_ Japan | 2008 | Yokote Masuda Tamati Masu | 0.3 | 6.9 |
| 20 | Iwate_ Japan | 2008 | Yokote Ju Monjimachi | 0.4 | 6.9 |
| Variable | Distribution Type | Mean | Standard Deviation |
|---|---|---|---|
| f1 (Pa) | Lognormal | 3 × 108 | 3 × 107 |
| f2 (Pa) | Lognormal | 3 × 108 | 3 × 107 |
| E1 (Pa) | Lognormal | 2 × 1011 | 2 × 1010 |
| E2 (Pa) | Lognormal | 2 × 1011 | 2 × 1010 |
| u | Normal | 0 | 1 |
| a (m/s2) | Type II extreme value | 1.17 | 1.376 |
| tc (m) | Lognormal | 0.05· |
| No. | Input Variable Vector x | φ | |||||||
|---|---|---|---|---|---|---|---|---|---|
| f1 (108 Pa) | f2 (108 Pa) | E1 (1011 Pa) | E2 (1011 Pa) | u | a (m/s2) | bc (m) | tc (m) | ||
| 1 | 2.614 | 4.143 | 2.339 | 1.636 | 1 | 2.59 | 0.395 | 0.01875 | 0.00785 |
| 2 | 4.143 | 3.837 | 1.837 | 1.837 | −2 | 4.86 | 0.5 | 0.01125 | 0.00697 |
| 3 | 3.837 | 2.309 | 2.439 | 2.138 | 3 | 9.39 | 0.465 | 0.015 | 0.03796 |
| 4 | 2.003 | 3.532 | 1.636 | 2.038 | 4 | 13.92 | 0.36 | 0.01625 | 0.28035 |
| 5 | 4.449 | 2.92 | 2.138 | 1.937 | 0 | 18.45 | 0.29 | 0.02 | 0.06172 |
| 6 | 3.532 | 4.449 | 2.038 | 2.339 | 2 | 7.12 | 0.22 | 0.01375 | 0.12321 |
| 7 | 2.92 | 2.003 | 1.937 | 1.736 | −1 | 11.65 | 0.255 | 0.01 | 0.03365 |
| 8 | 2.309 | 3.226 | 2.239 | 2.439 | −3 | 16.18 | 0.43 | 0.0125 | 0.01047 |
| 9 | 3.226 | 2.614 | 1.736 | 2.239 | −4 | 0.33 | 0.325 | 0.0175 | 0.00025 |
| Method | Nc | Design Variable Vector D | Sc (m2) | ||
|---|---|---|---|---|---|
| bc (m) | |||||
| EGO-EGRA | 120 | 0.3322 | 0.01 | 0.01289 | 0.0481 |
| Proposed method | 9 + 52 | 0.3300 | 0.01 | 0.01280 | 0.0497 |
| 3 + 61 | 0.3302 | 0.01 | 0.01281 | 0.0496 | |
| 6 + 58 | 0.3304 | 0.01 | 0.01282 | 0.0496 | |
| 17 + 55 | 0.3321 | 0.01 | 0.01288 | 0.0483 | |
| Initial scenario | - | 0.25 | 0.016 | 0.01498 | 0.0914 |
| Variable | Distribution Type | Mean | Standard Deviation |
|---|---|---|---|
| fs (Pa) | Lognormal | 3.07 × 108 | 3.07 × 107 |
| fc (Pa) | Lognormal | 3.447 × 107 | 3.447 × 106 |
| Es (Pa) | Lognormal | 2.01 × 1011 | 2.01 × 1010 |
| εu,core | Lognormal | 5 × 10−3 | 5 × 10−4 |
| u | Normal | 0 | 1 |
| a (m/s2) | Type II extreme value | 1.17 | 1.376 |
| No. | Input Variable Vector x | φ(x) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| fs (108 Pa) | fc (107 Pa) | Es (1011 Pa) | εu,core (10−3) | u | a (m/s2) | b1 (m) | b2 (m) | ||
| 1 | 2.363 | 4.76 | 1.342 | 5.377 | 3 | 6.18 | 0.35 | 0.375 | 0.1648 |
| 2 | 4.24 | 4.409 | 2.571 | 7.415 | 1 | 4.23 | 0.425 | 0.3 | 0.02113 |
| 3 | 2.988 | 5.112 | 2.981 | 4.867 | −3 | 10.08 | 0.45 | 0.425 | 0.00566 |
| 4 | 3.614 | 3.707 | 1.957 | 3.338 | −4 | 2.28 | 0.3 | 0.4 | 0.00139 |
| 5 | 3.927 | 2.301 | 2.776 | 4.357 | 4 | 8.13 | 0.375 | 0.475 | 0.28316 |
| 6 | 4.553 | 4.058 | 1.547 | 6.396 | −2 | 12.03 | 0.4 | 0.5 | 0.01429 |
| 7 | 3.301 | 3.355 | 1.752 | 3.848 | 2 | 13.98 | 0.5 | 0.325 | 0.22224 |
| 8 | 2.675 | 2.653 | 2.366 | 6.905 | −1 | 15.93 | 0.325 | 0.35 | 0.04925 |
| 9 | 2.05 | 3.004 | 2.161 | 5.886 | 0 | 0.34 | 0.475 | 0.45 | 0.00066 |
| Method | Nc | Design Variable Vector D | Vc (m3) | ||
|---|---|---|---|---|---|
| b1 (m) | b2 (m) | ||||
| EGO-EGRA | 196 | 0.448 | 0.386 | 9.02 | 0.0424 |
| Proposed method | 9 + 101 | 0.442 | 0.388 | 9.02 | 0.0423 |
| Initial scenario | - | 0.33 | 0.43 | 9.02 | 0.096 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Yue, F.; Wang, X.; Zhang, X. Reliability-Based Design Optimization of Structures Considering Uncertainties of Earthquakes Based on Efficient Gaussian Process Regression Metamodeling. Axioms 2022, 11, 81. https://doi.org/10.3390/axioms11020081
Xiao Y, Yue F, Wang X, Zhang X. Reliability-Based Design Optimization of Structures Considering Uncertainties of Earthquakes Based on Efficient Gaussian Process Regression Metamodeling. Axioms. 2022; 11(2):81. https://doi.org/10.3390/axioms11020081
Chicago/Turabian StyleXiao, Yanjie, Feng Yue, Xinwei Wang, and Xun’an Zhang. 2022. "Reliability-Based Design Optimization of Structures Considering Uncertainties of Earthquakes Based on Efficient Gaussian Process Regression Metamodeling" Axioms 11, no. 2: 81. https://doi.org/10.3390/axioms11020081
APA StyleXiao, Y., Yue, F., Wang, X., & Zhang, X. (2022). Reliability-Based Design Optimization of Structures Considering Uncertainties of Earthquakes Based on Efficient Gaussian Process Regression Metamodeling. Axioms, 11(2), 81. https://doi.org/10.3390/axioms11020081