
The Λ-Fractional Hydrocephalus Model




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Λ-Fractional Derivative
- Definition of the Λ-fractional space corresponding to the initial space and time t, based upon Equation (8).
- Solution of the problem into the Λ-space following conventional procedures since differential geometry is generated in that space.
- Transferring the results into the initial space, considering Equation (9).
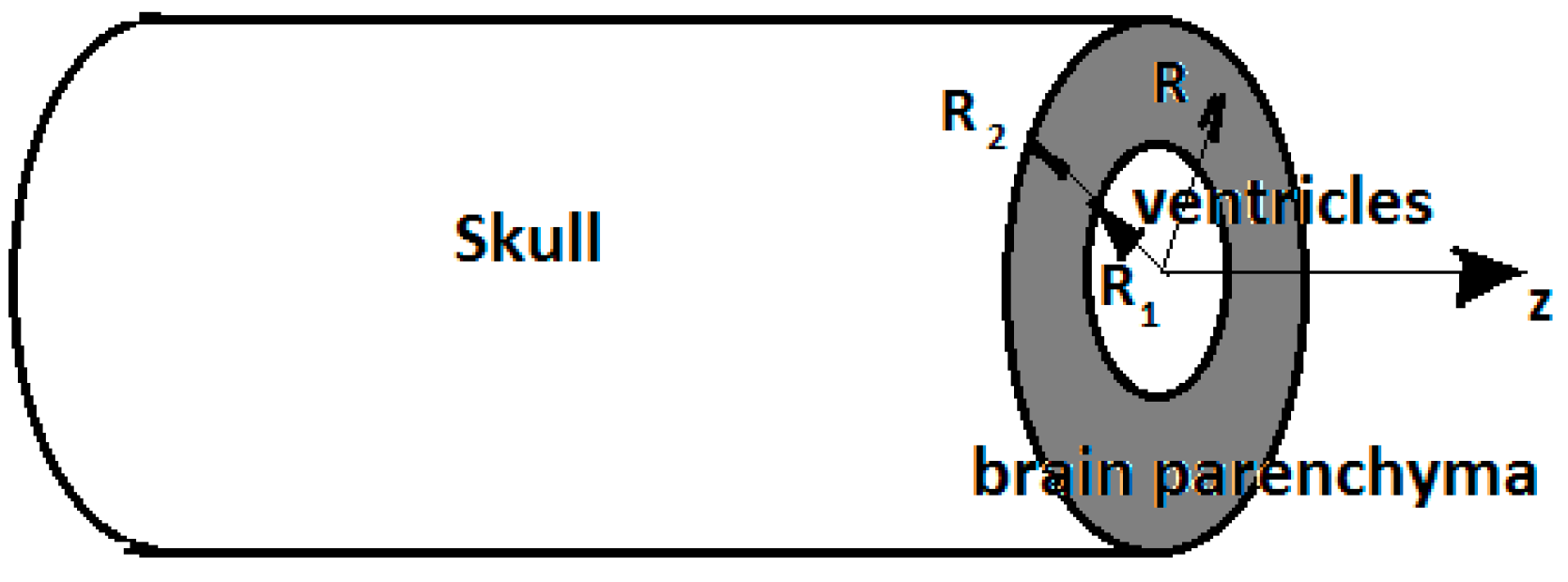
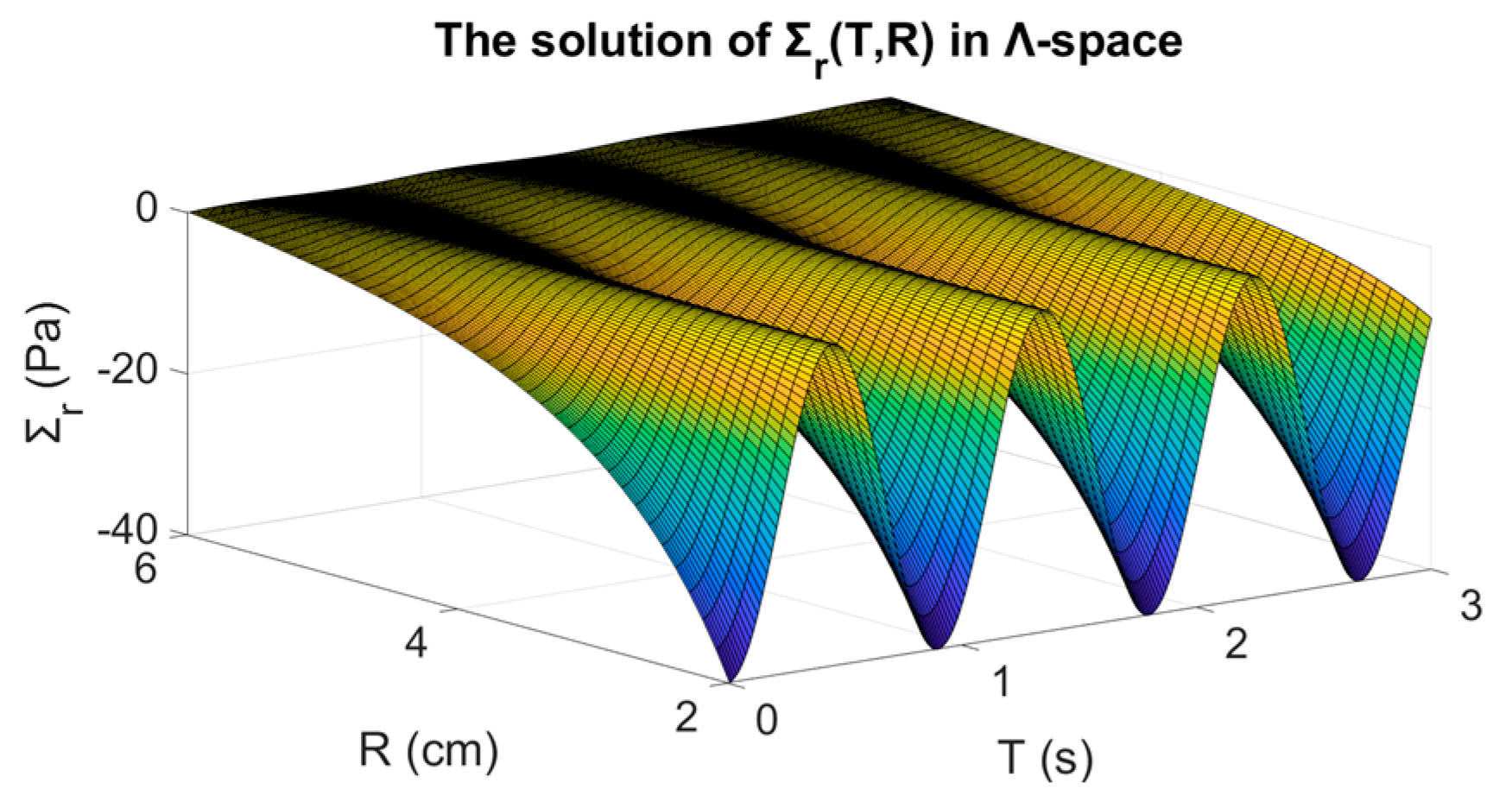
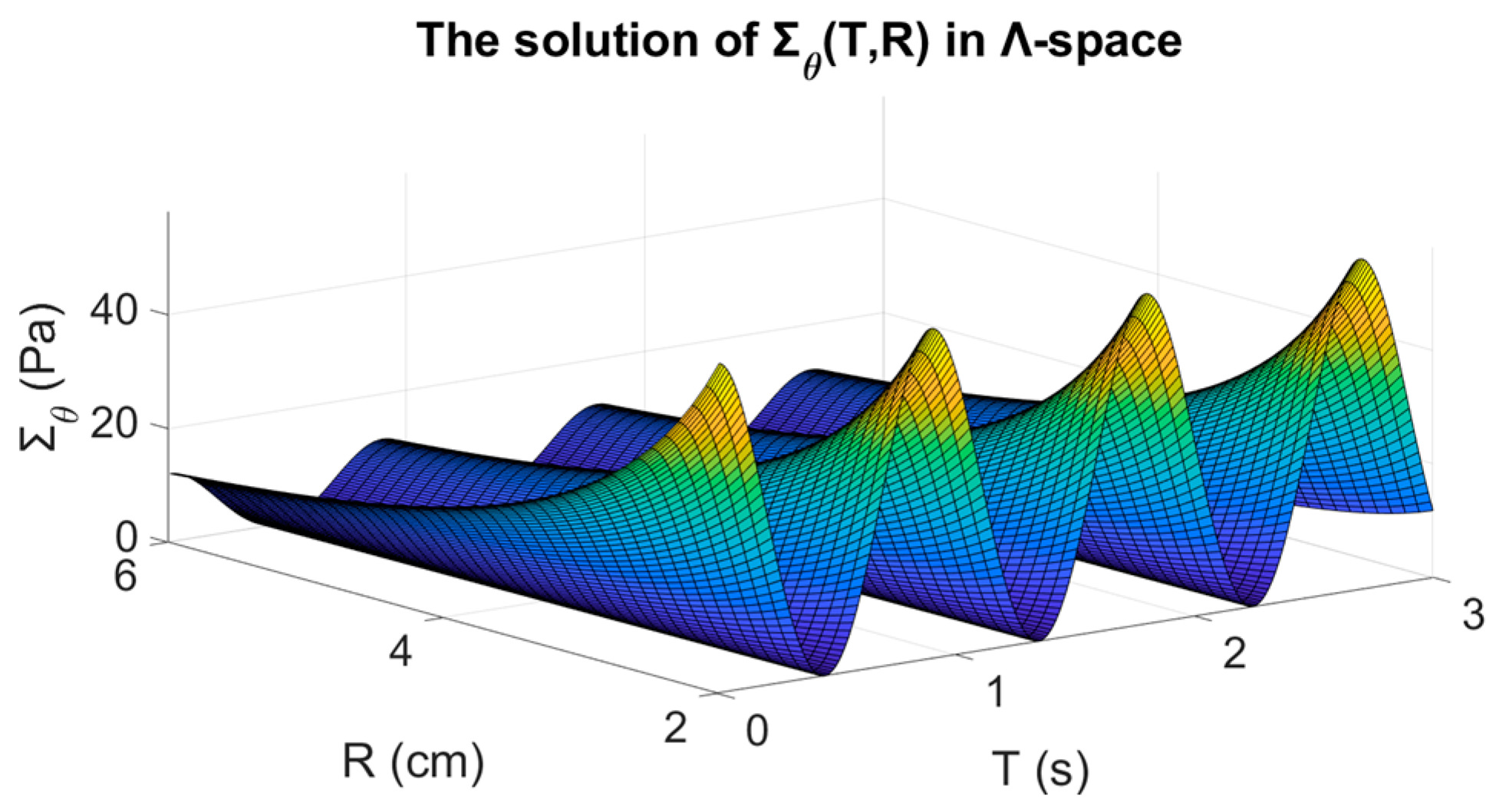
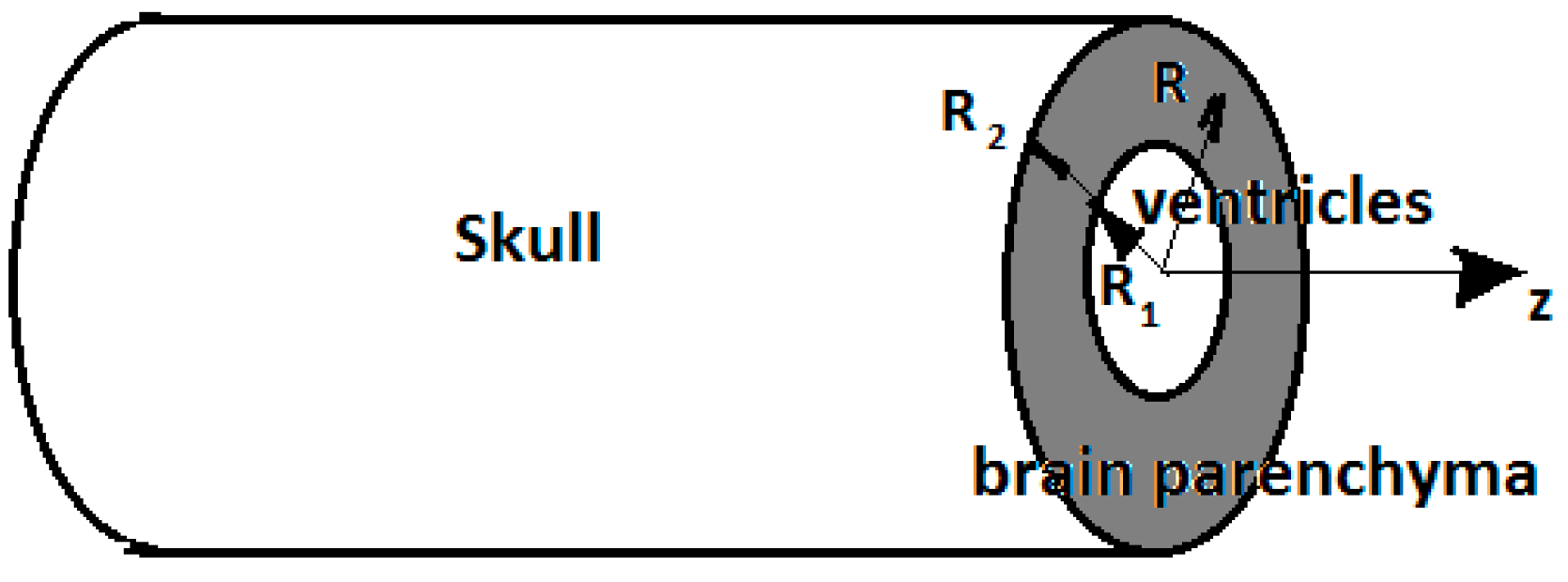
3. The Continuum Mechanics Hydrocephalus Model in the Λ-Fractional Space
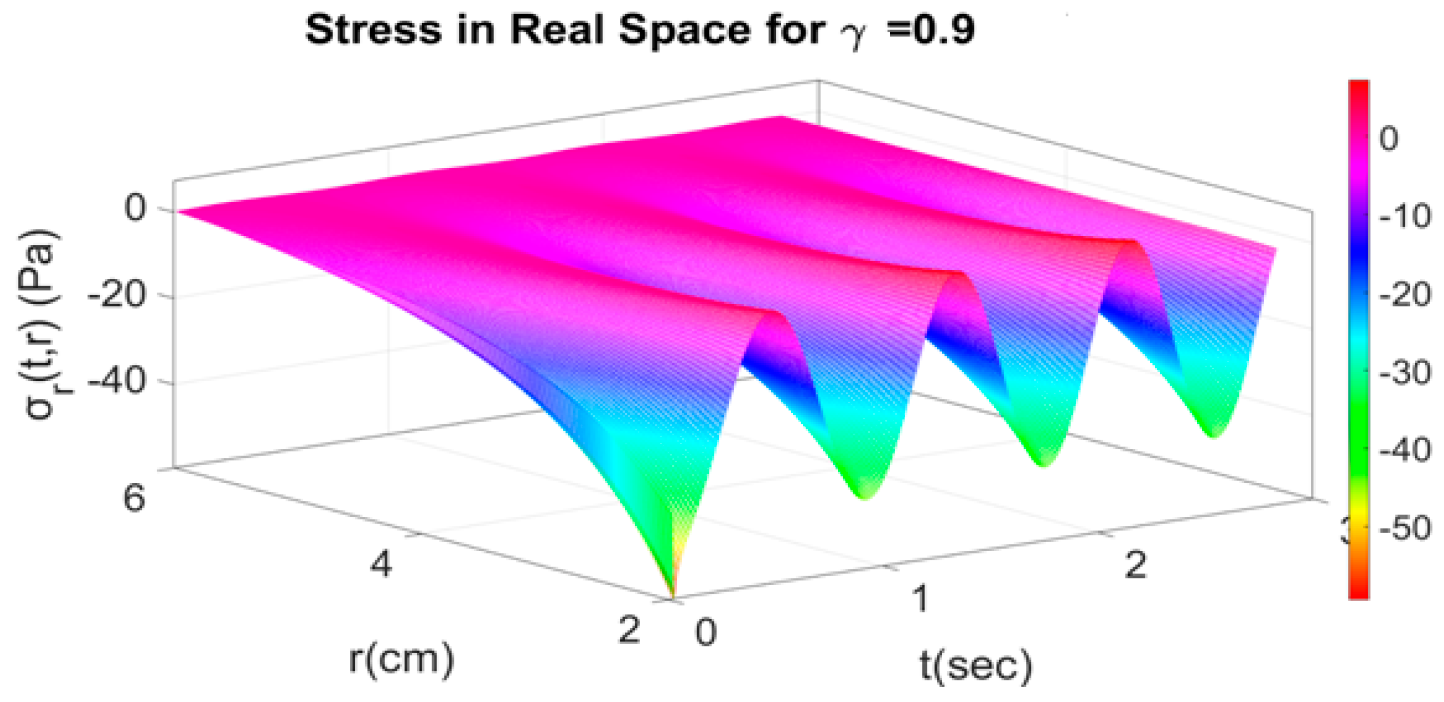
4. The Stresses in the Initial Space
4.1. Fractional Response with Respect to Time
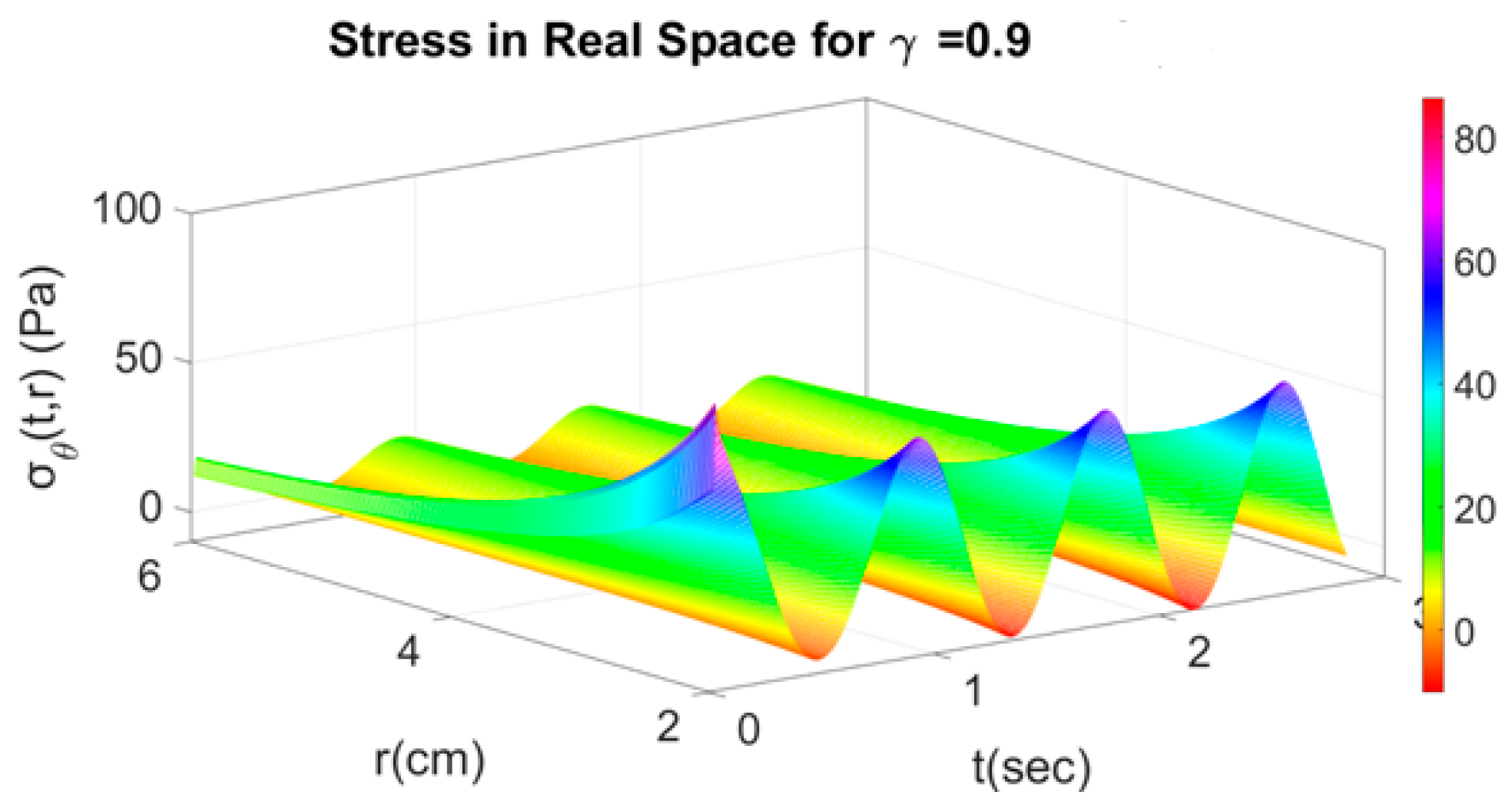
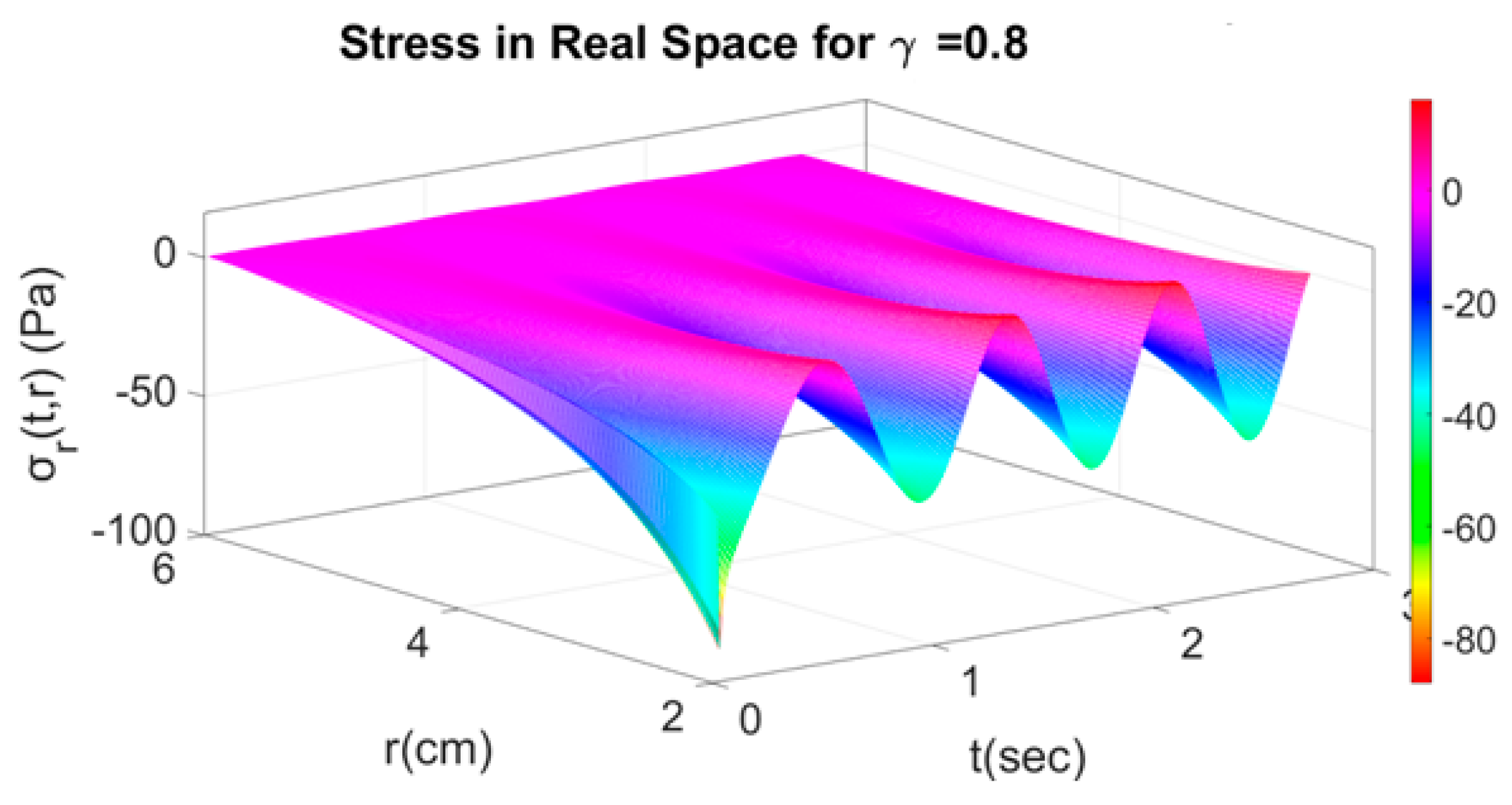
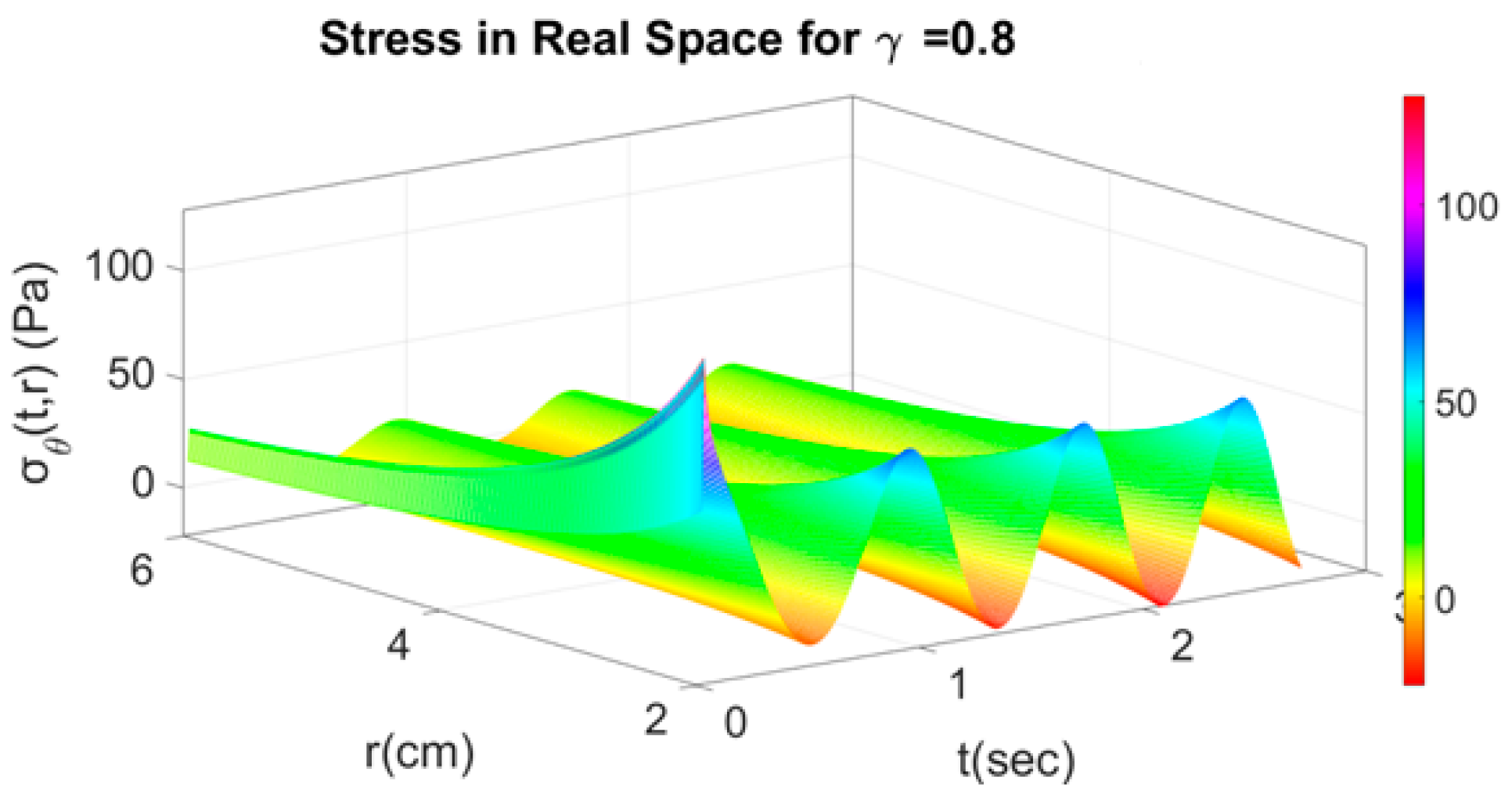
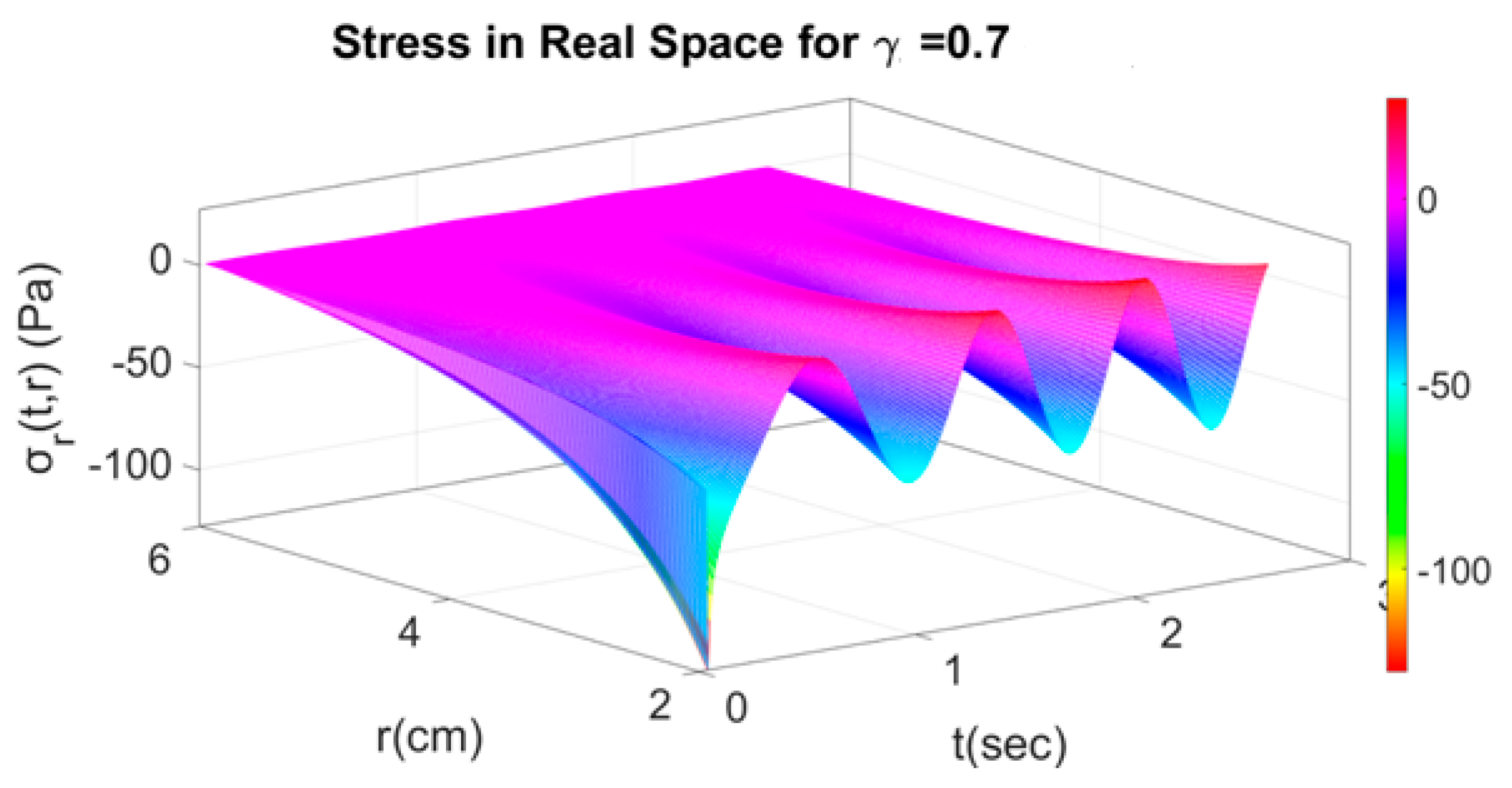
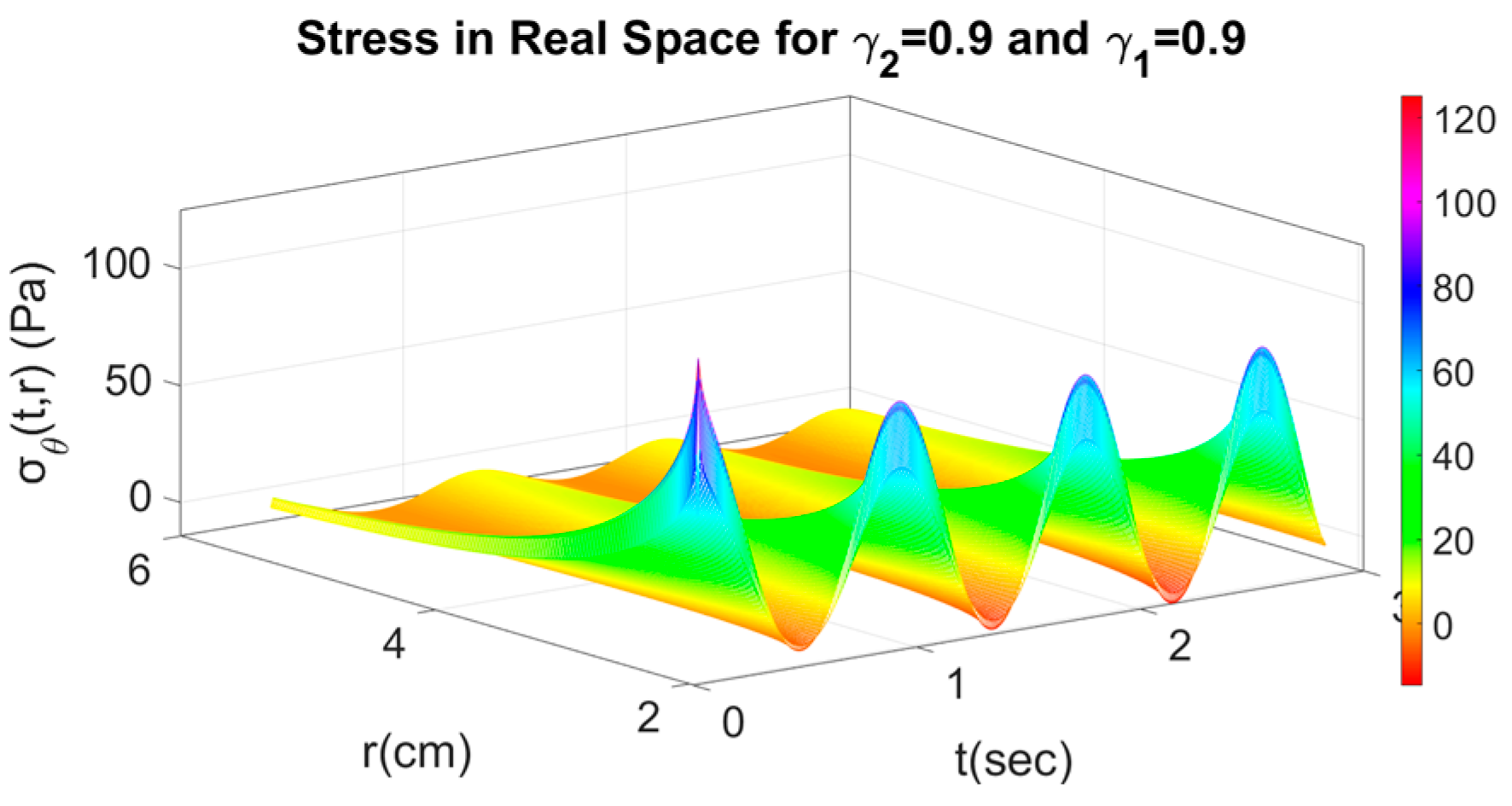
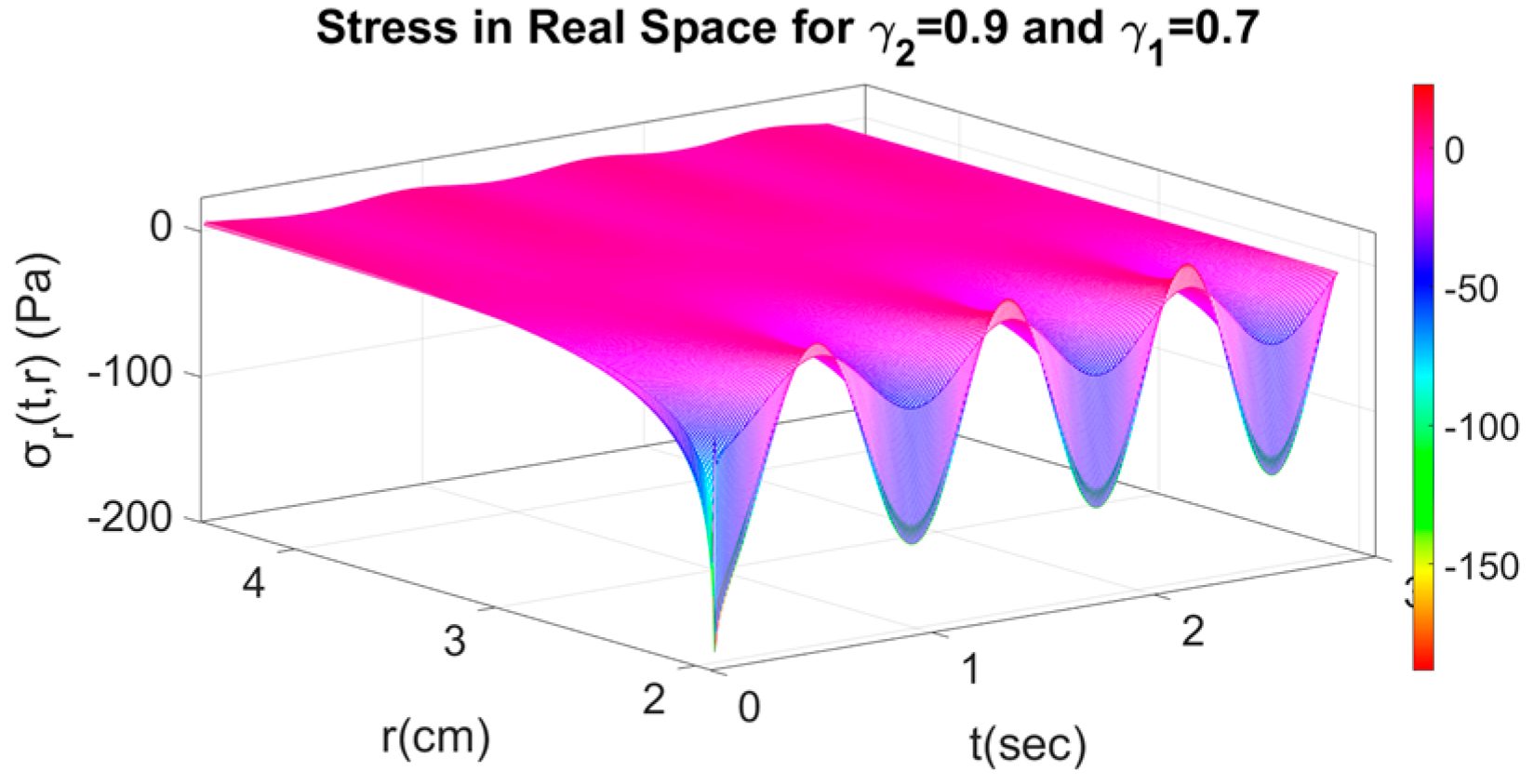
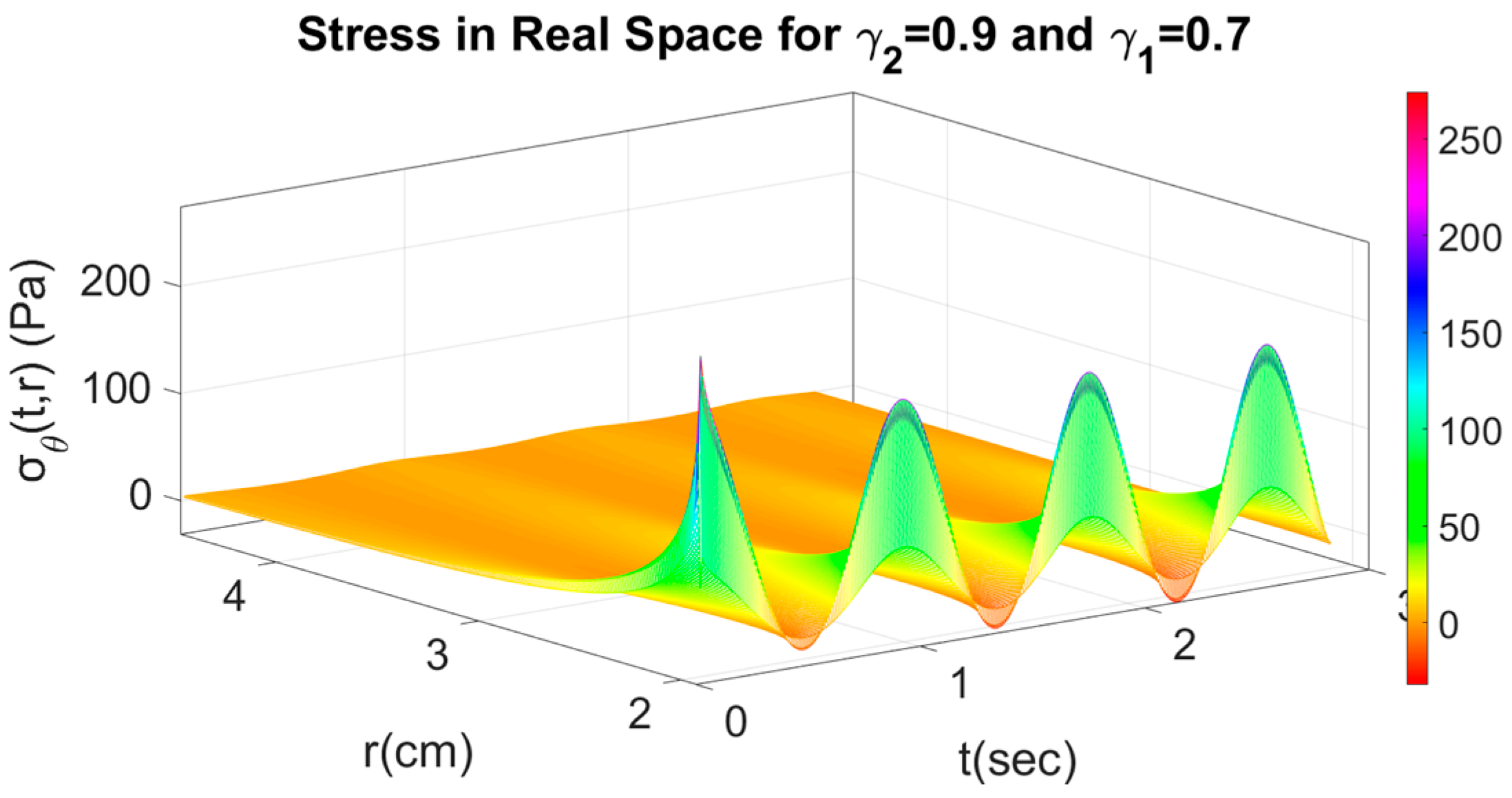
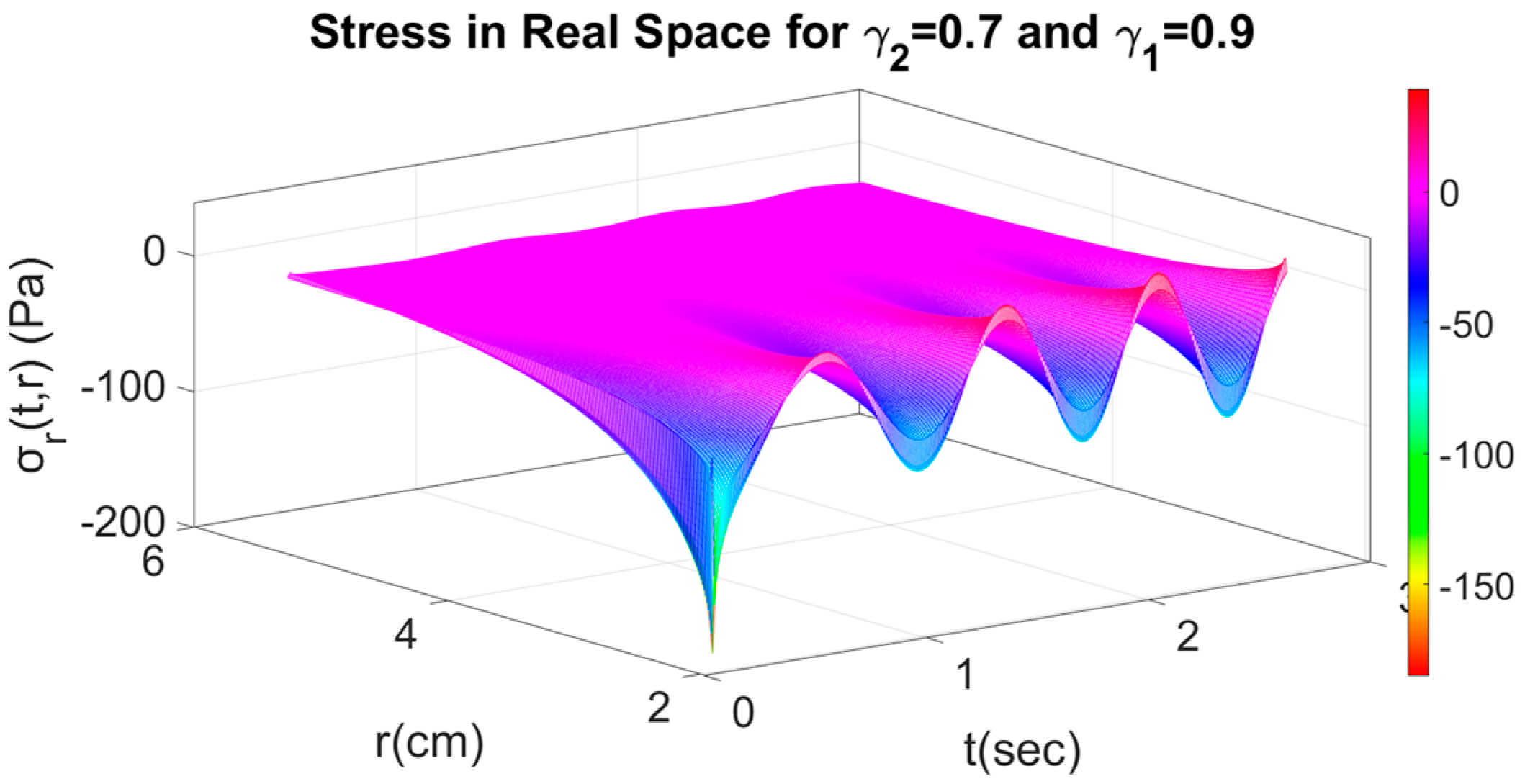
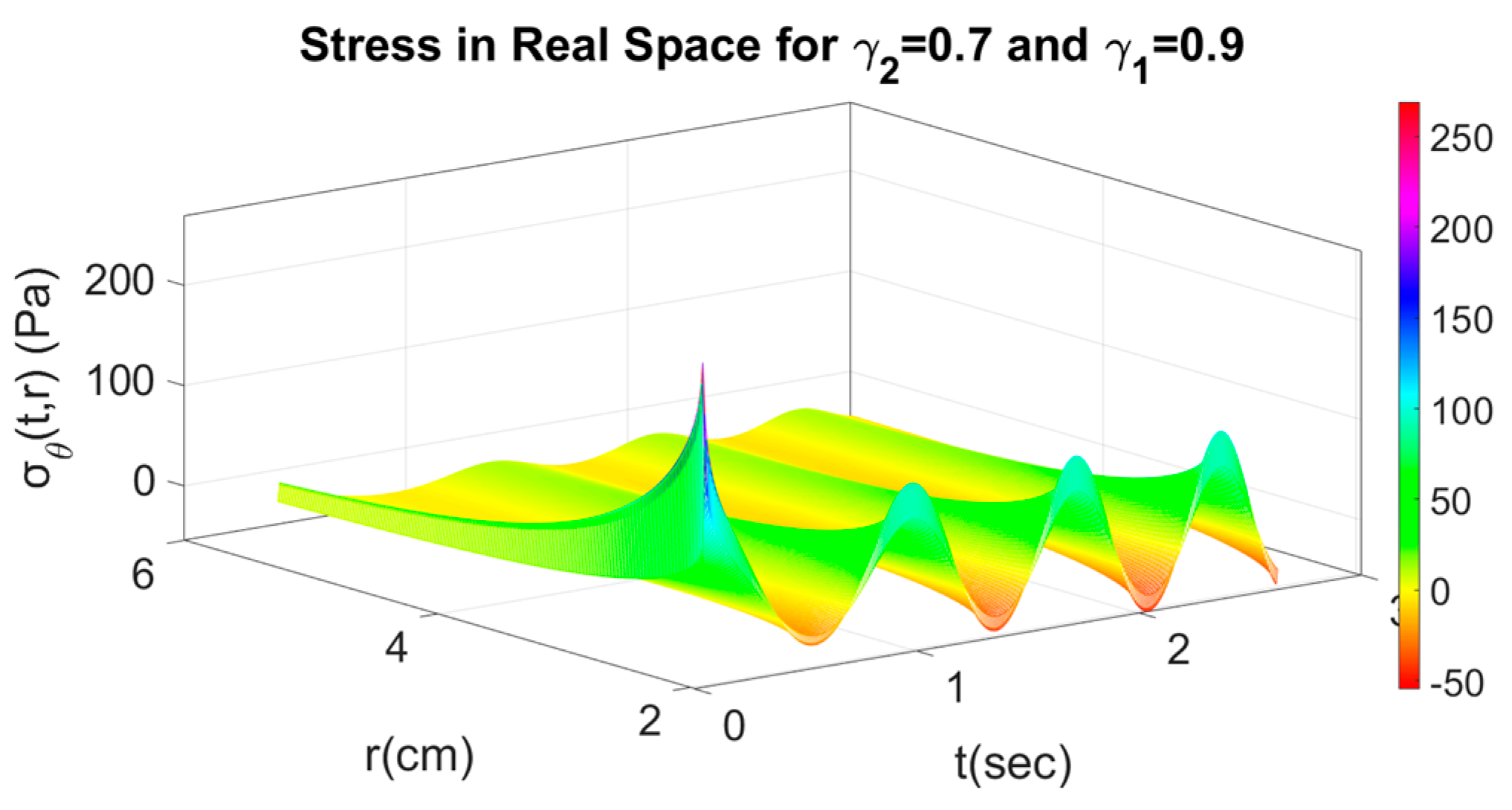
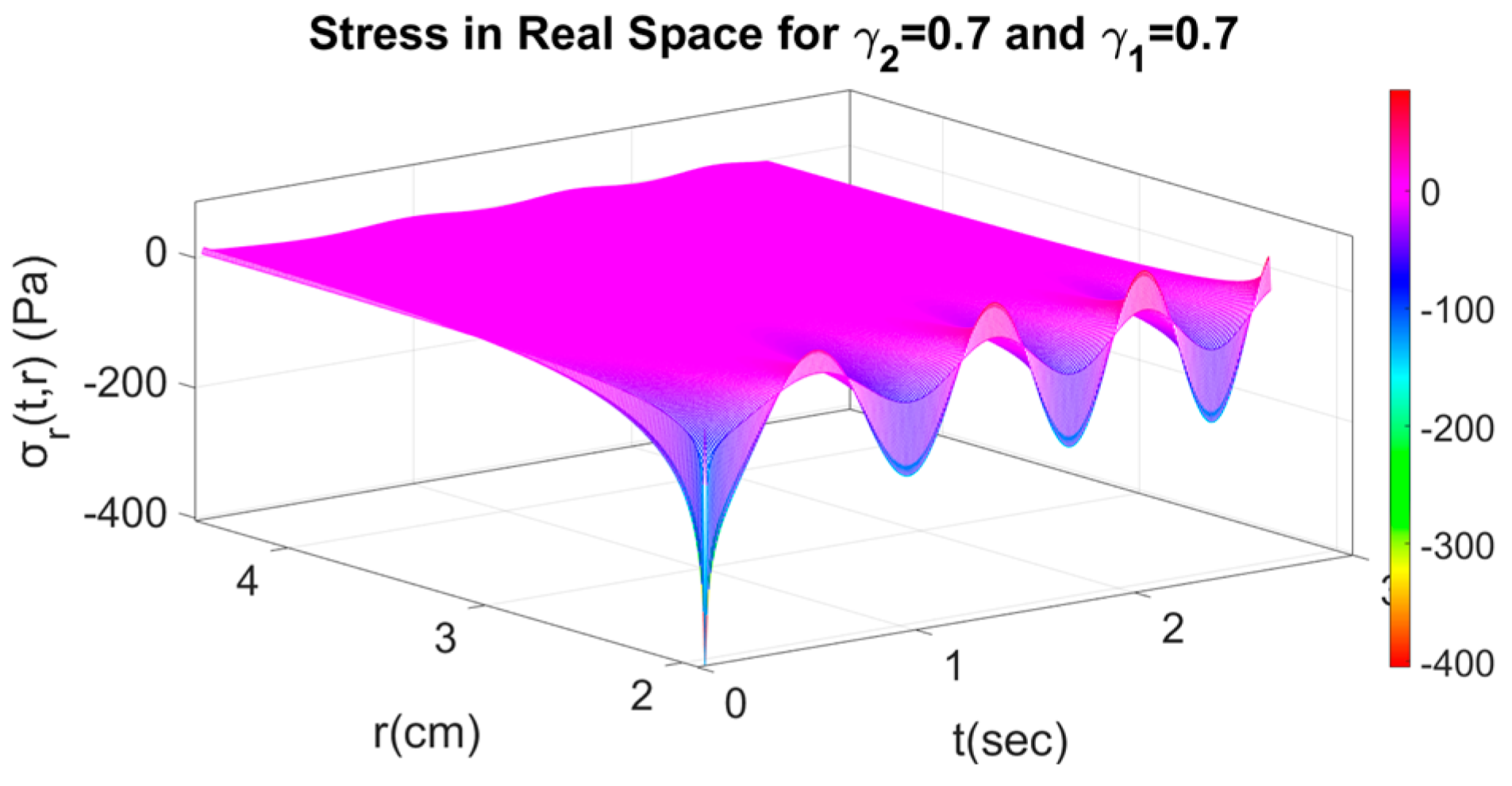
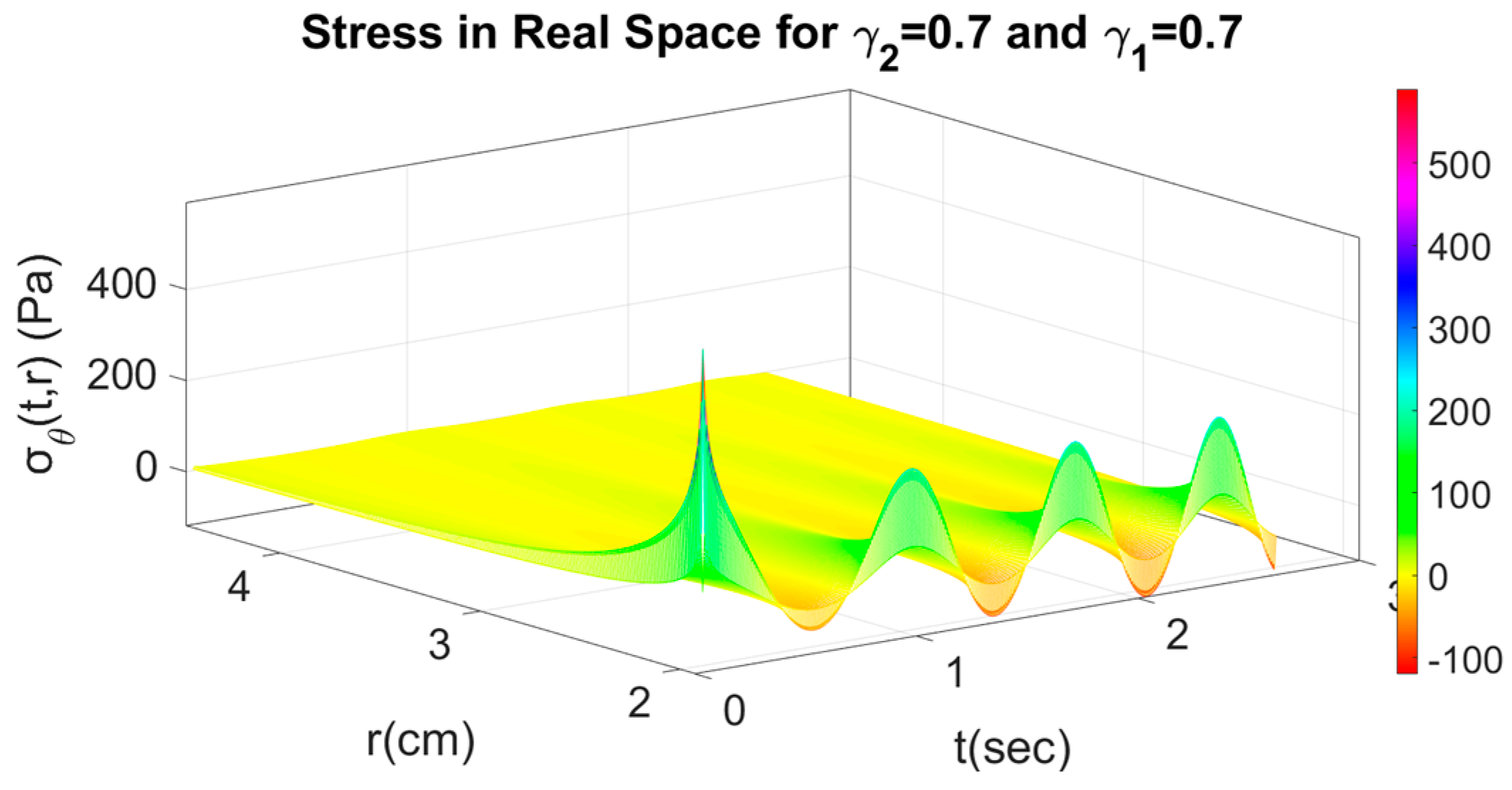
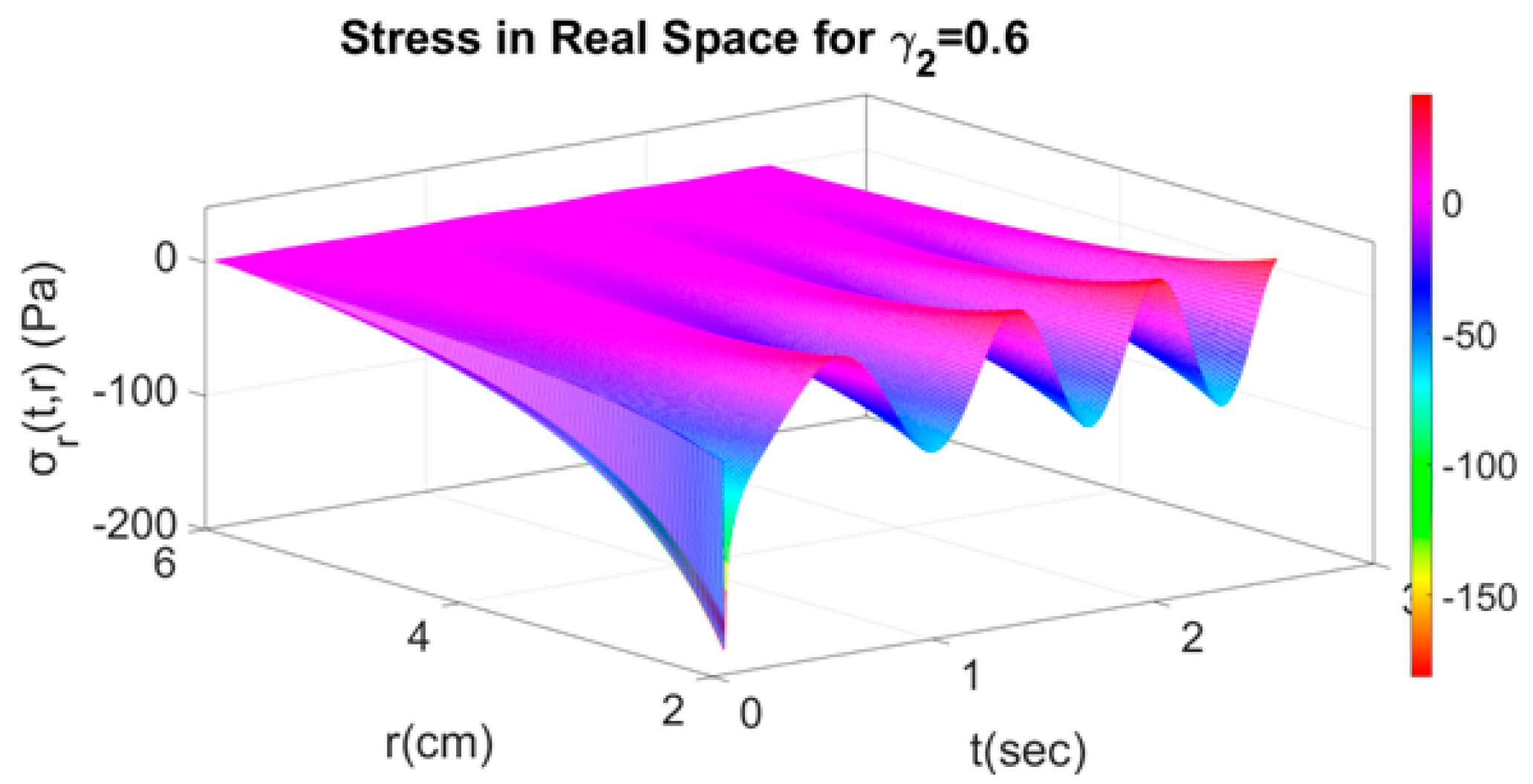
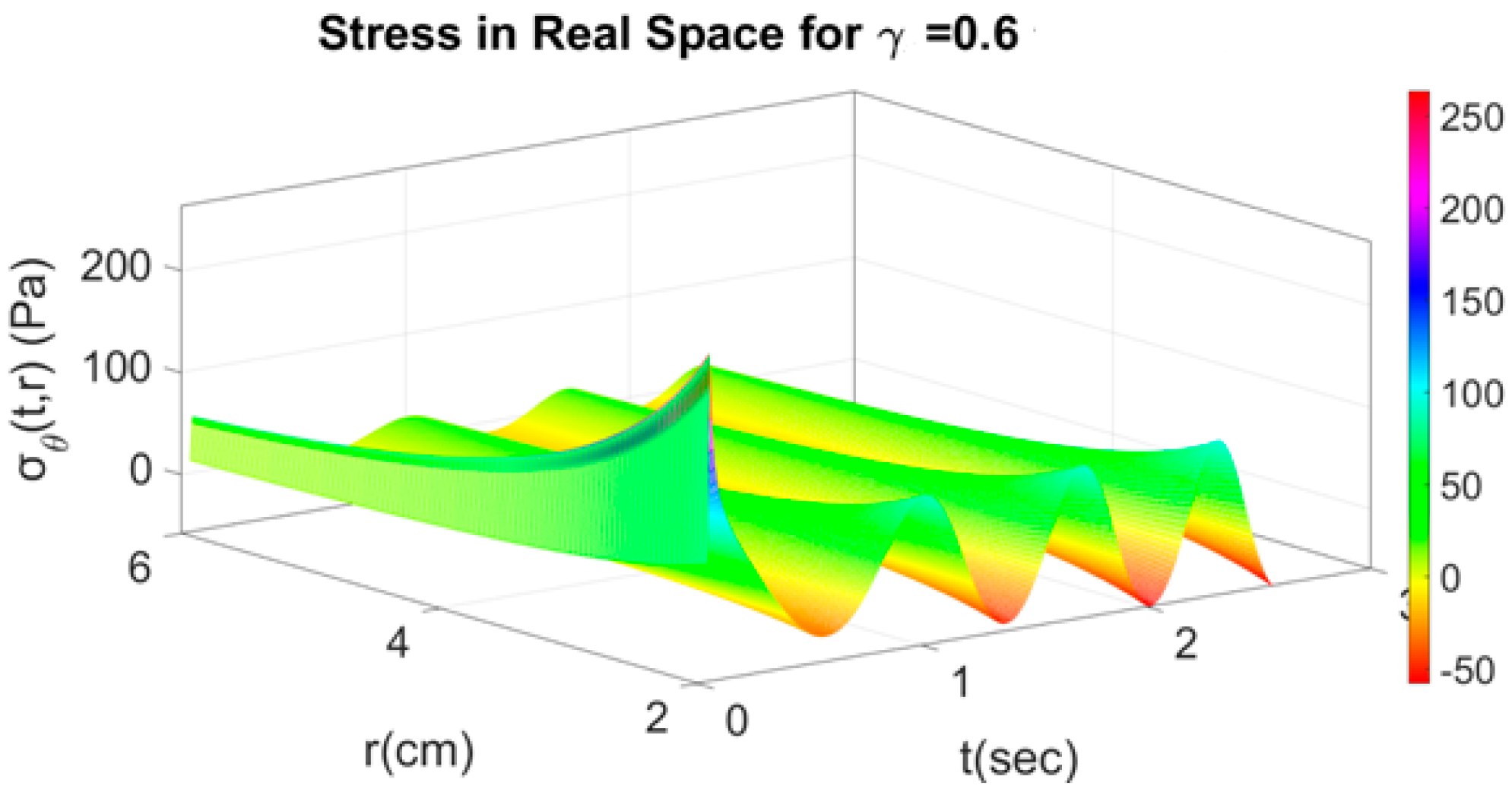
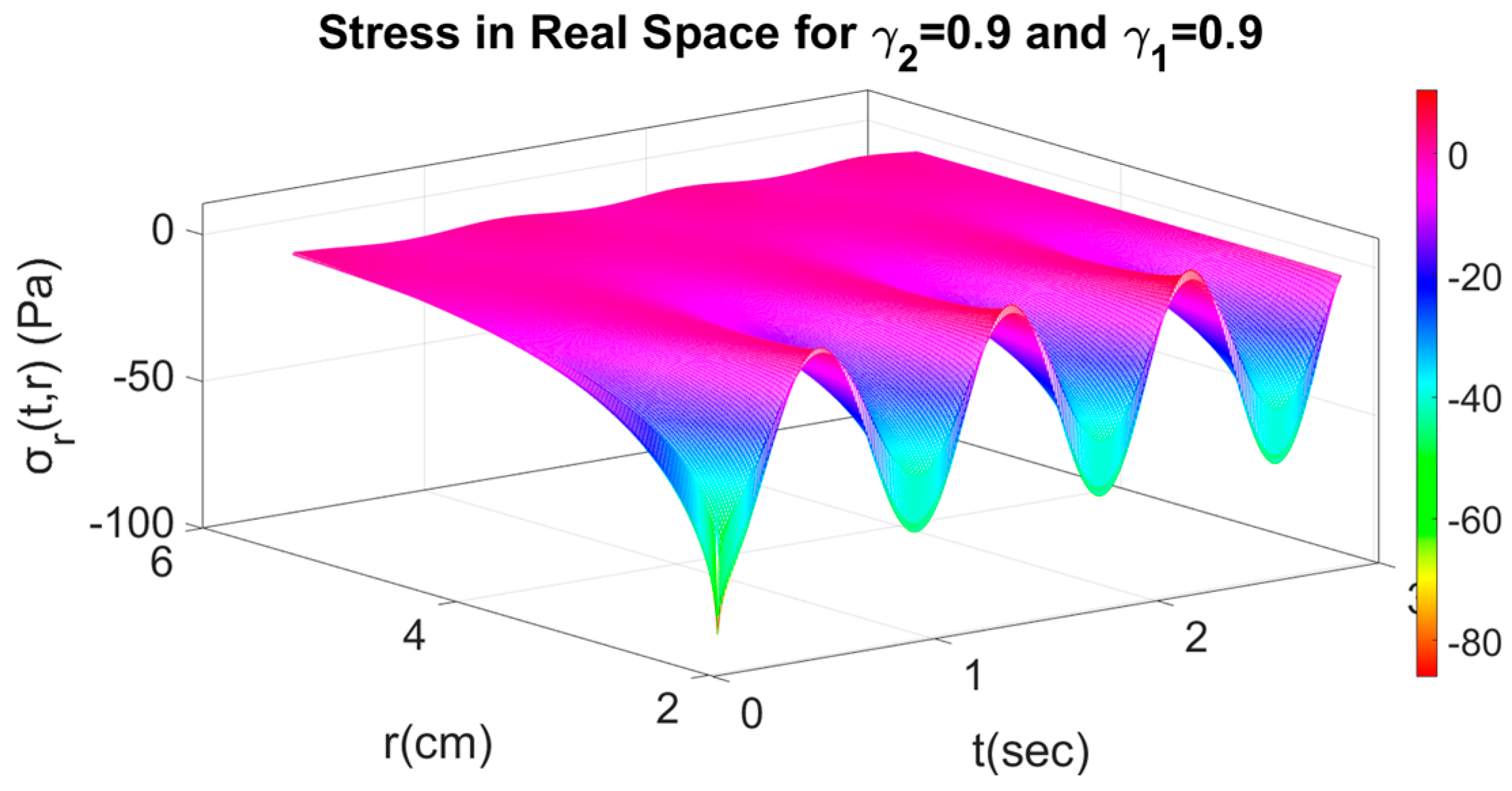
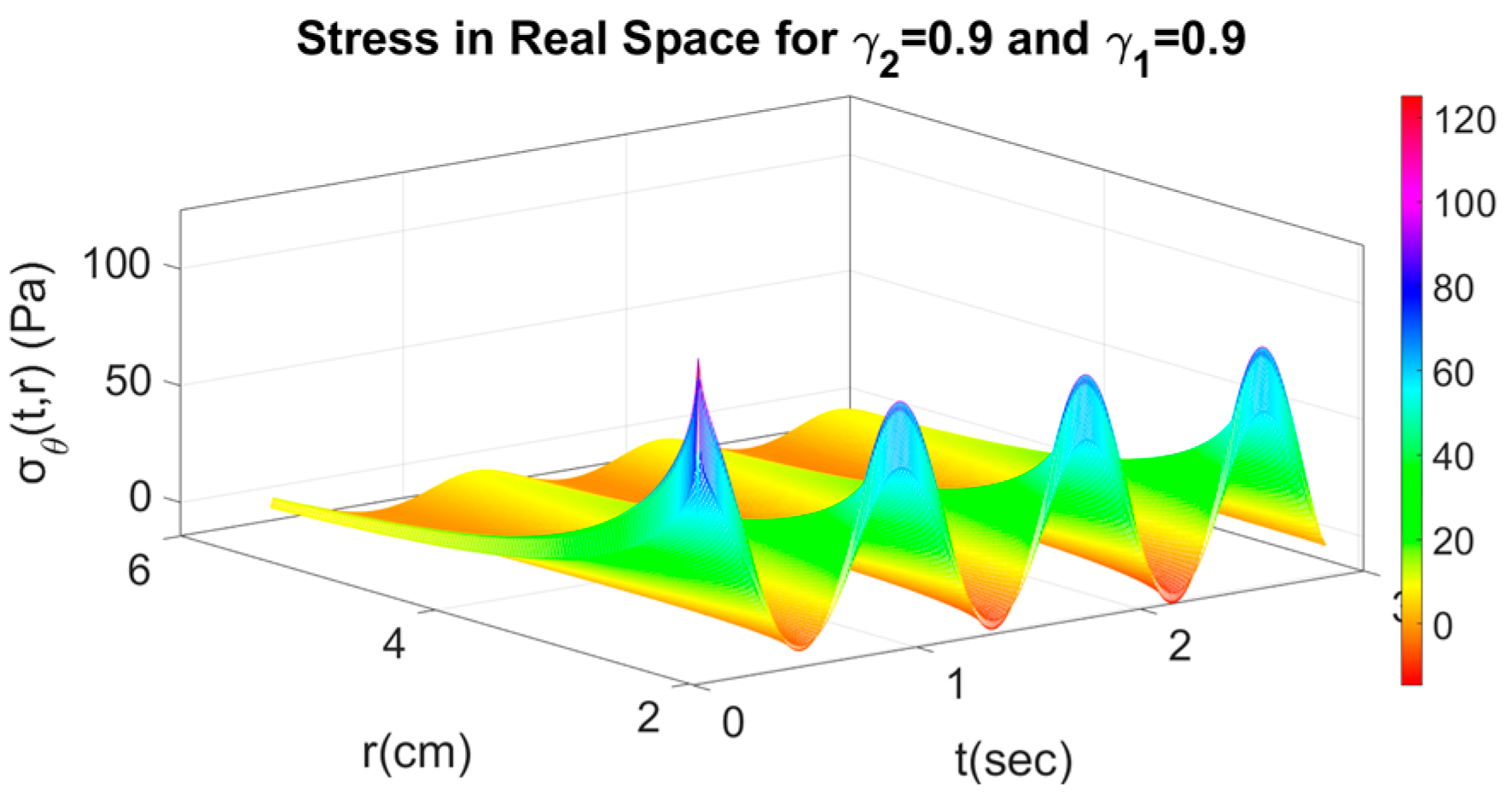
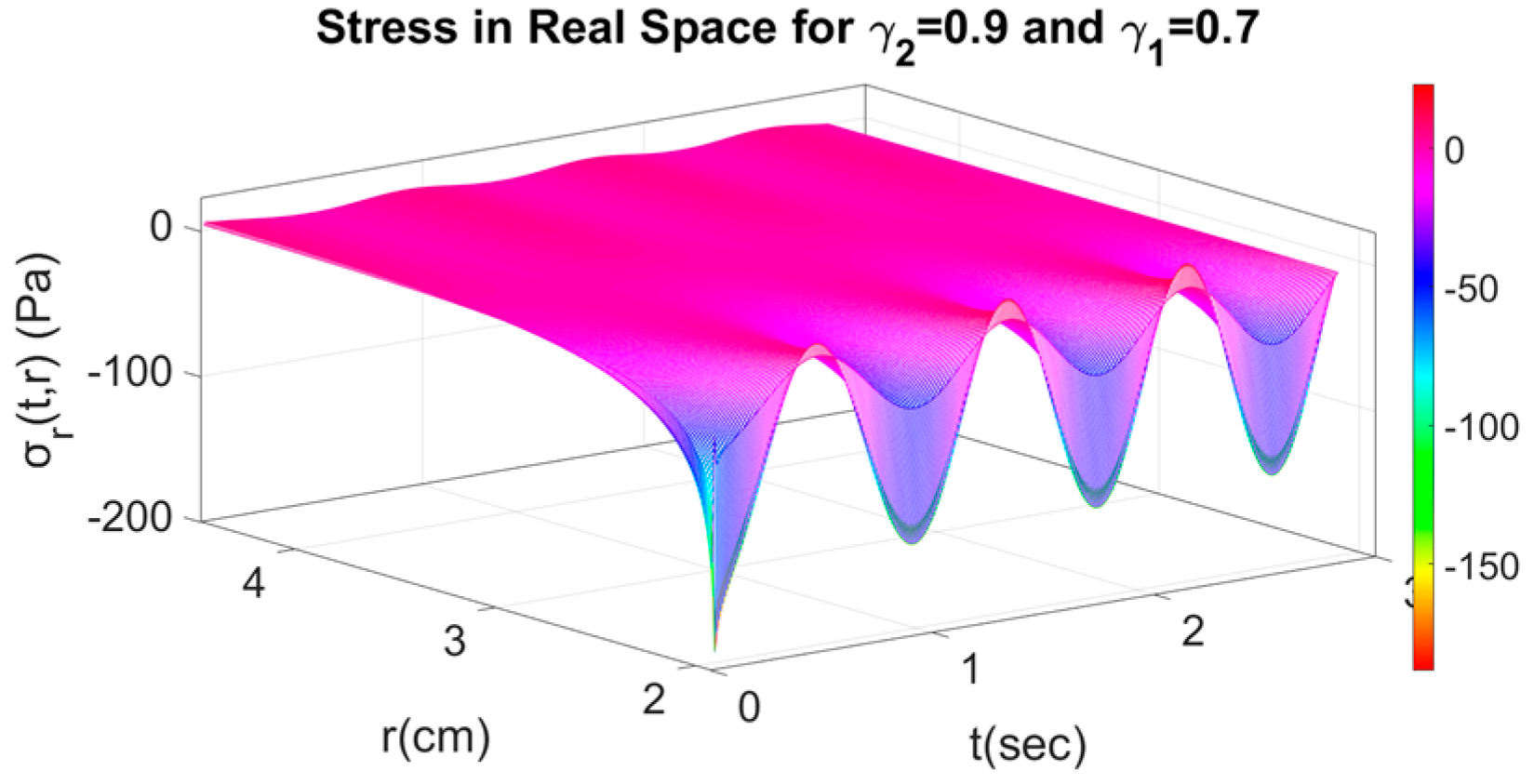
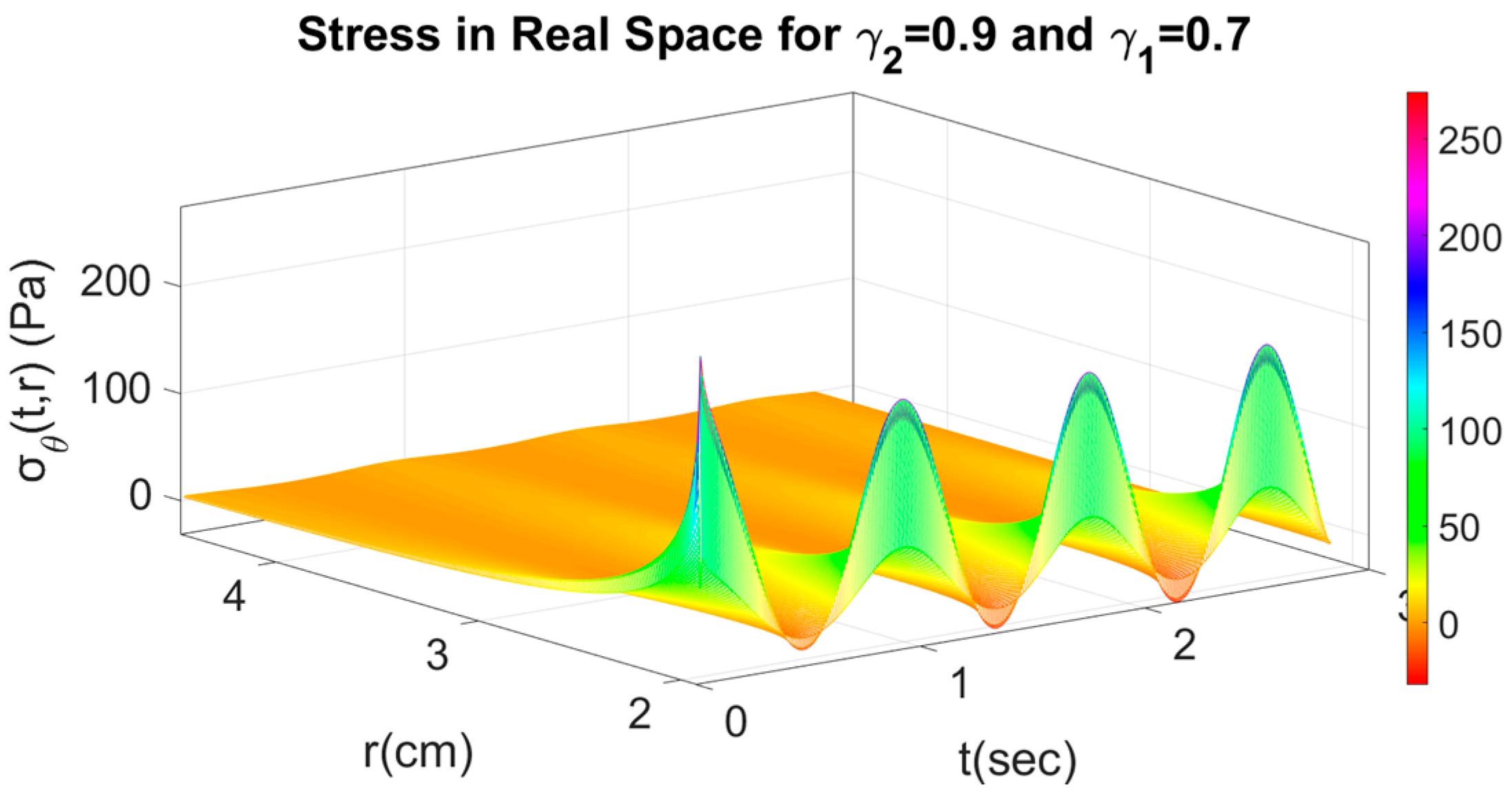
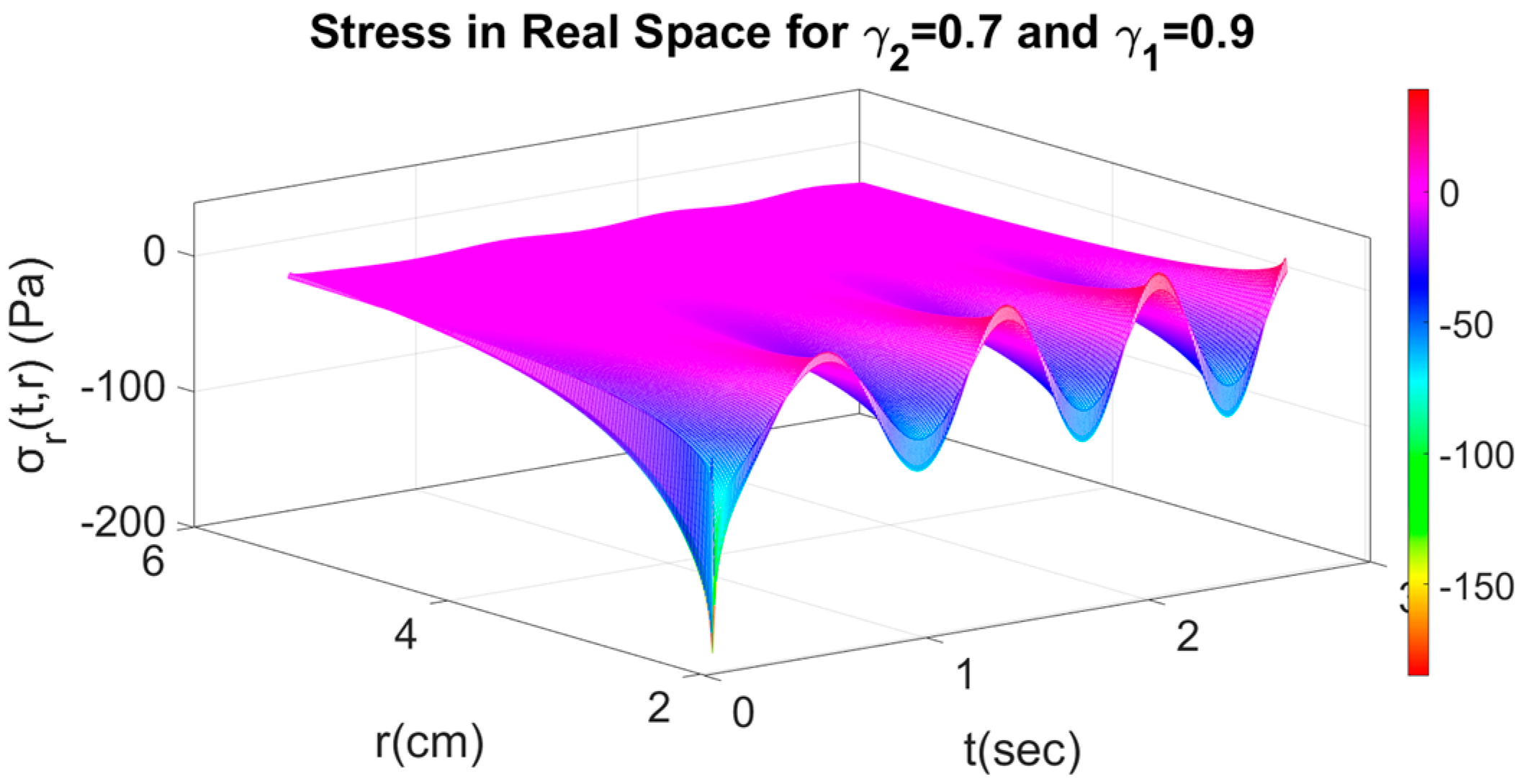
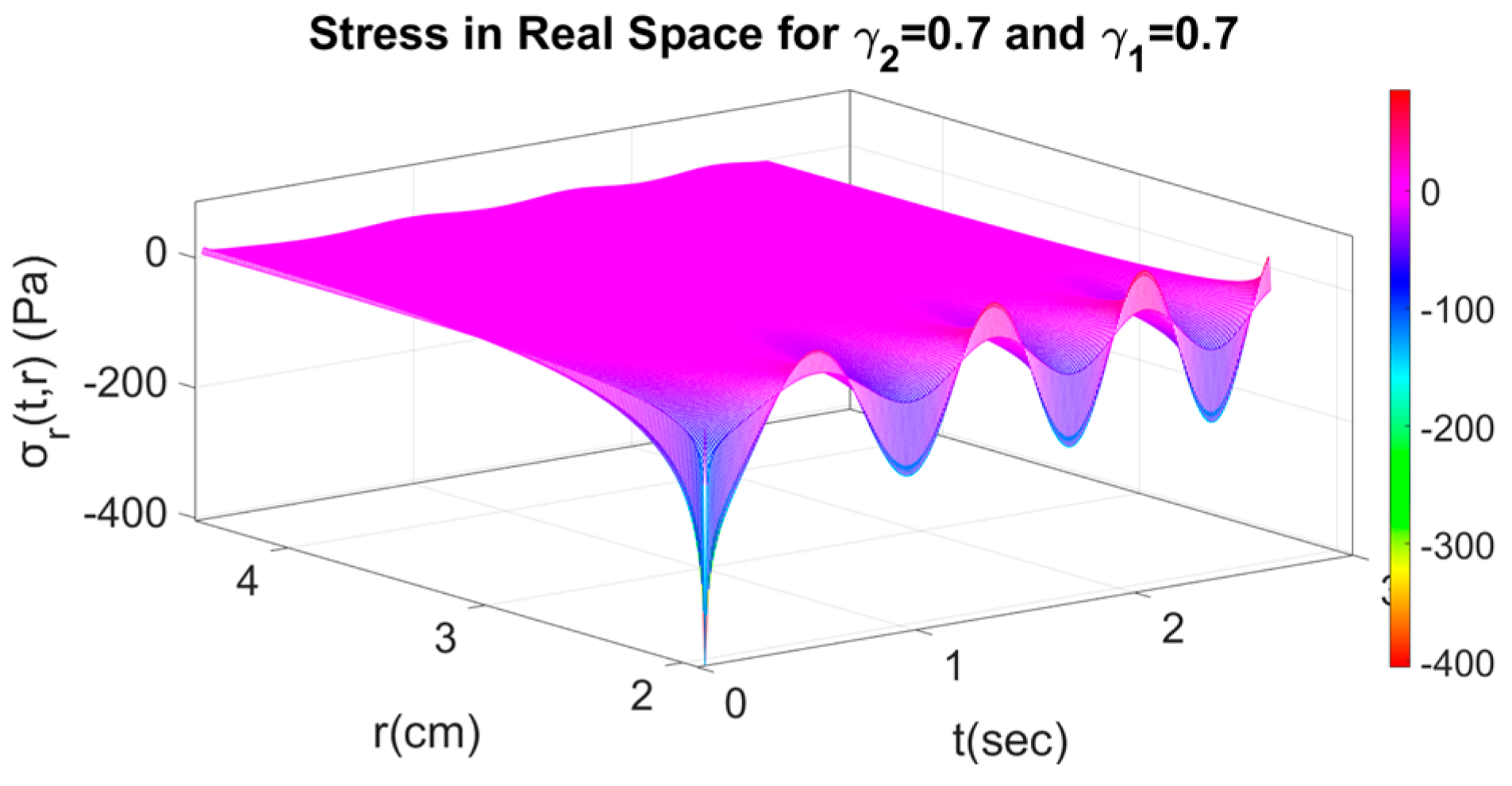
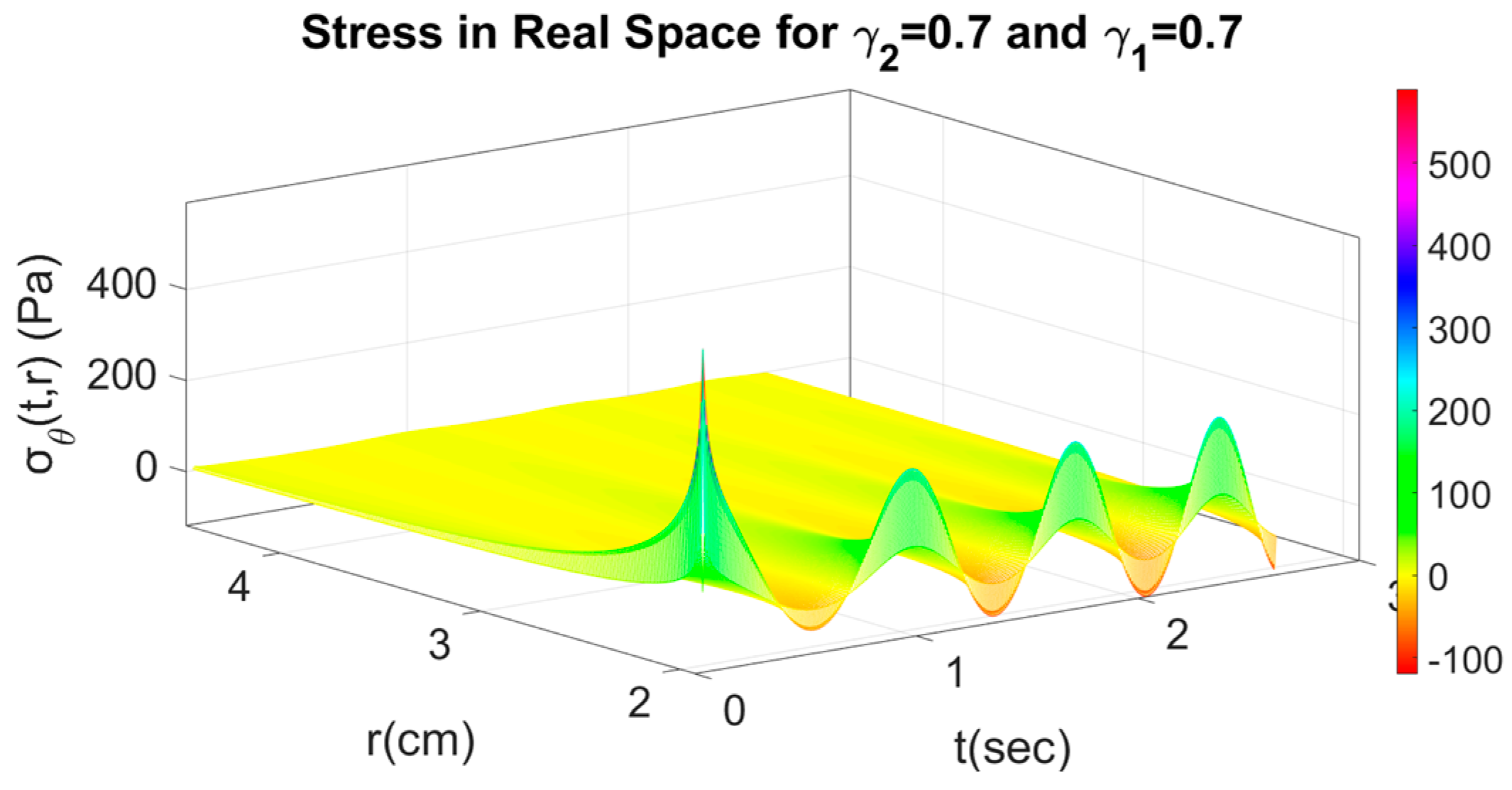
4.2. Fractional Response with Respect to Time and Space
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wilkie, K.P.; Drapaca, C.S.; Sivaloganathan, S. A nonlinear viscoelastic fractional derivative model of infant hydrocephalus. Appl. Math. Comput. 2011, 217, 8693–8704. [Google Scholar] [CrossRef]
- Chillingworth, D.R.J. Differential Topology with a View to Applications; Pitman: London, UK; San Francisco, CA, USA, 1976. [Google Scholar]
- Lazopoulos, K.A.; Lazopoulos, A.K. On Λ-fractional Elastic Solid Mechanics. Meccanica 2022, 57, 775–791. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. On plane Λ-fractional linear elasticity theory. Theor. Appl. Mech. Lett. 2020, 10, 270–275. [Google Scholar] [CrossRef]
- Drapaca, C. Brain Biomechanics: Dynamical Morphology and Nonlinear Viscoelastic Models of Hydrocephalus. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2002. [Google Scholar]
- Drapaca, C.S.; Sivaloganathan, S. Mathematical Modelling and Biomechanics of Brain; Fields Institute, Monographs; Springer: New York, NY, USA, 2019; Volume 37. [Google Scholar]
- Hakim, S.; Venegas, J.; Burton, J. The physics of the cranial cavity, hydrocephalus and normal pressure hydrocephalus: Mechanical interpretation and mathematical model. Surg. Neurol. 1976, 5, 187–210. [Google Scholar] [PubMed]
- Atanackovic, T.; Philipovic, S.; Stankovic, B.; Zorica, D. Fractional Calculus with Applications in Mechanics, Vibrations and Diffusion Processes; Wiley: New York, NY, USA, 2014. [Google Scholar]
- Drapaca, C.S.; Sivaloganathan, S.; Tenti, G.; Brake, J. Dynamical morphology of the brain’s ventricular cavities in hydrocephalus. J. Theor. Med. 2005, 6, 151–160. [Google Scholar] [CrossRef] [Green Version]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; An Introduction to Fractional Derivatives, Fractional Differential Equations, Some Methods of Their Solution and Some of Their Applications; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA; London, UK, 1974. [Google Scholar]
- McAlister, P., II; Talcott, M.R.; Isaacs, A.M.; Zwick, S.H.; Garcia-Bonilla, M.; Castaneyra-Ruiz, L.; Hartman, A.L.; Dilger, R.N.; Fleming, S.A.; Golden, R.K.; et al. A novel model of acquired hydrocephalus for evaluation of neurosurgical treatments. Fluids Barriers CNS 2021, 18, 49. [Google Scholar] [CrossRef] [PubMed]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazopoulos, A.K.; Karaoulanis, D.; Lazopoulos, K.A. The Λ-Fractional Hydrocephalus Model. Axioms 2022, 11, 638. https://doi.org/10.3390/axioms11110638
Lazopoulos AK, Karaoulanis D, Lazopoulos KA. The Λ-Fractional Hydrocephalus Model. Axioms. 2022; 11(11):638. https://doi.org/10.3390/axioms11110638
Chicago/Turabian StyleLazopoulos, Anastasios K., Dimitrios Karaoulanis, and Kostantinos A. Lazopoulos. 2022. "The Λ-Fractional Hydrocephalus Model" Axioms 11, no. 11: 638. https://doi.org/10.3390/axioms11110638
APA StyleLazopoulos, A. K., Karaoulanis, D., & Lazopoulos, K. A. (2022). The Λ-Fractional Hydrocephalus Model. Axioms, 11(11), 638. https://doi.org/10.3390/axioms11110638