
Numerical Scheme Based on the Implicit Runge-Kutta Method and Spectral Method for Calculating Nonlinear Hyperbolic Evolution Equations



Abstract
:1. Introduction
2. Discretization of Space Using Spectral Method
3. Discretization of Time Using Implicit Runge-Kutta Method
3.1. Matrix Form
3.2. Implicit Runge-Kutta Method
3.3. Application of Implicit Runge-Kutta Method and Iteration Formula
3.4. Implementation of Iterative Method
3.4.1. Implementation of Half Step
3.4.2. The First Stage
3.4.3. The Second Stage
3.4.4. Decision of Convergence
4. Benchmark Calculations
4.1. Linear Case
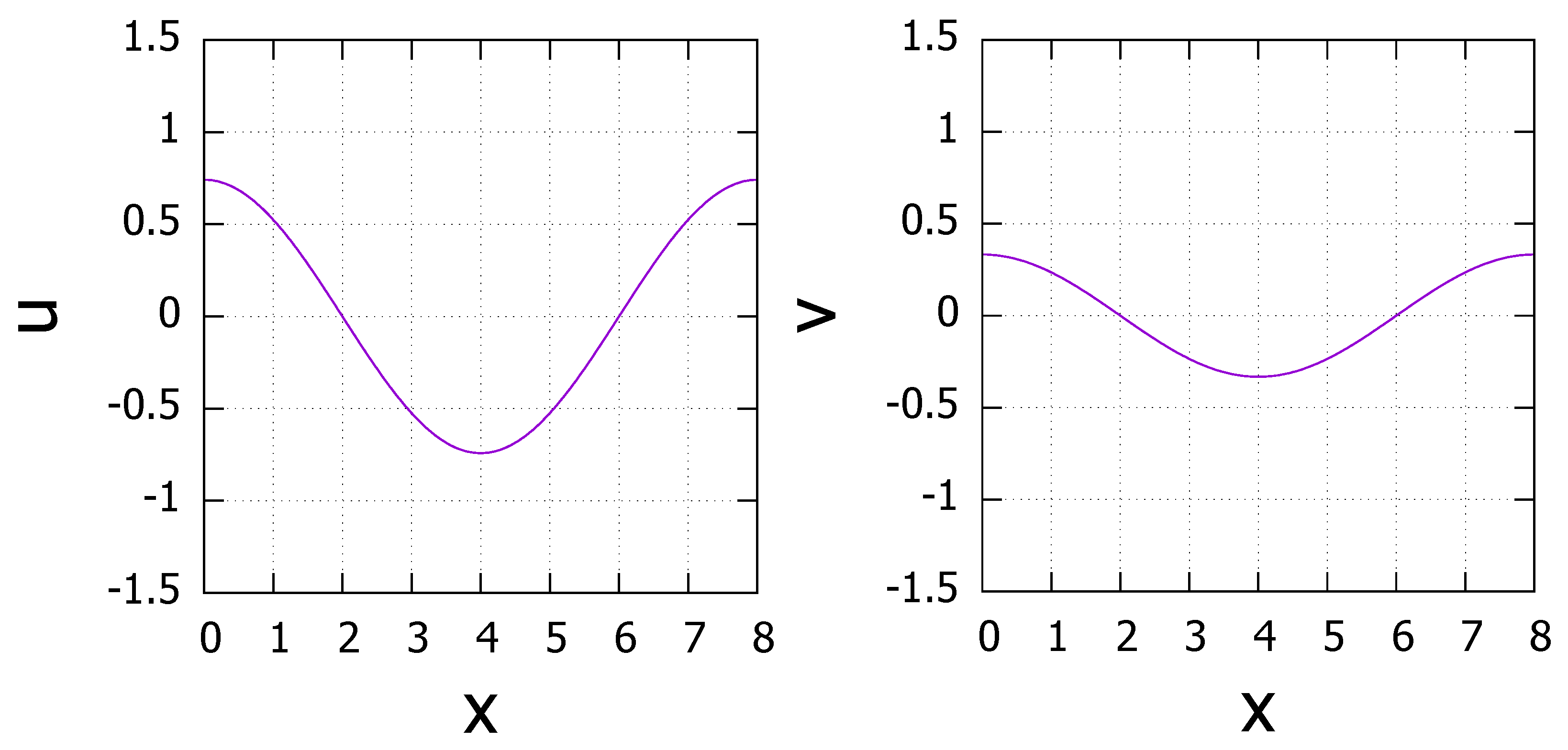
4.1.1. Comparison to Exact Solution
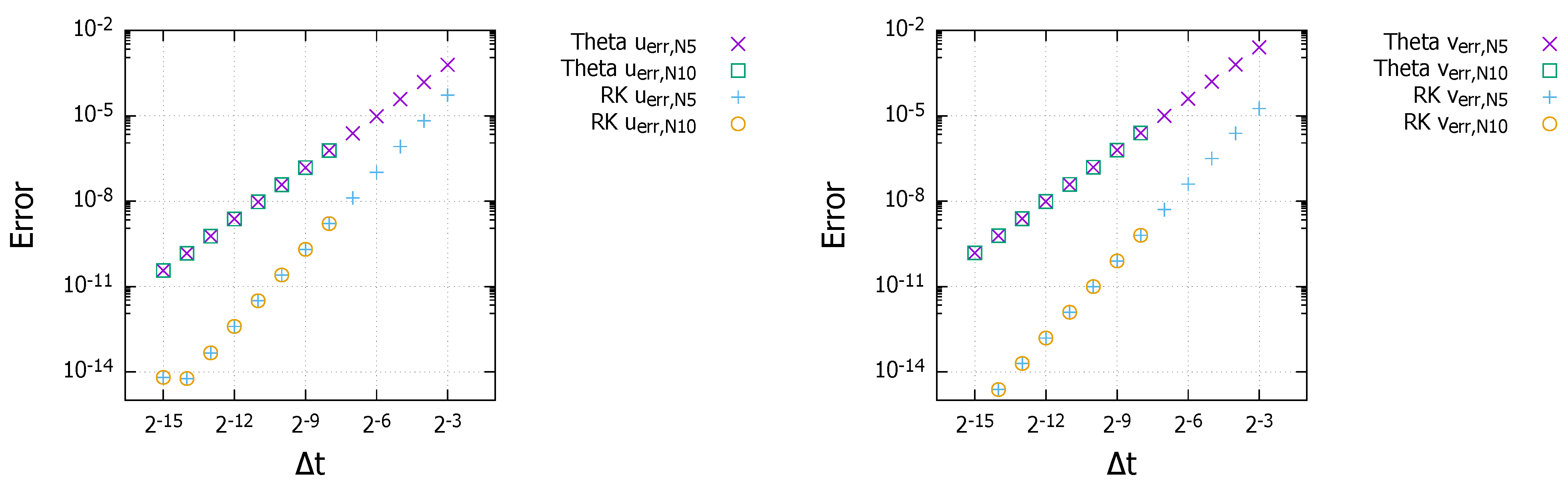
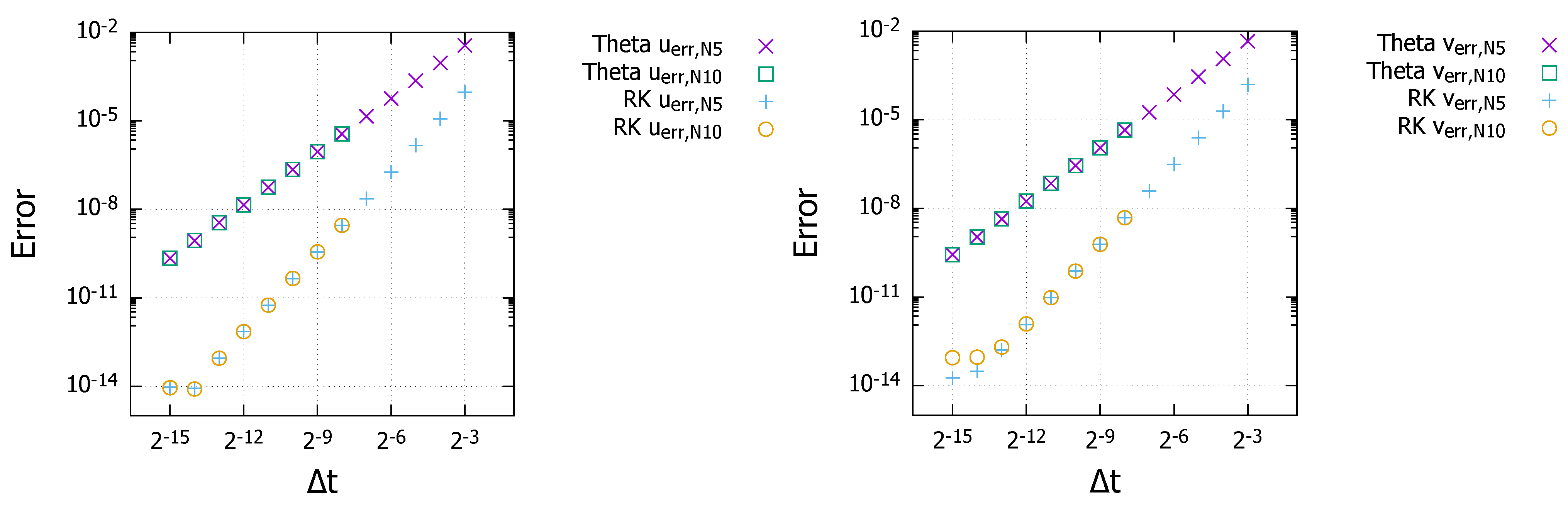
4.1.2. Accuracy Depending on Discretization of Time Variables
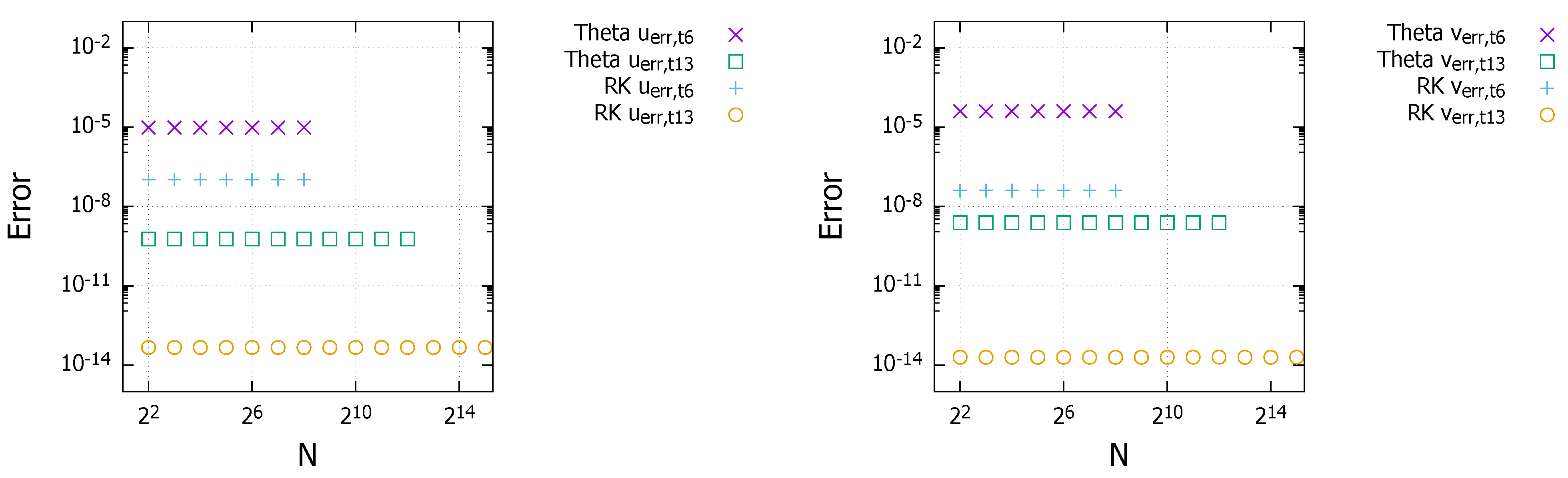
4.1.3. Accuracy Depending on Discretization of Spatial Variables
4.1.4. Convergence/Stability of Iteration
4.2. Nonlinear Case
4.2.1. Comparison to Exact Solution
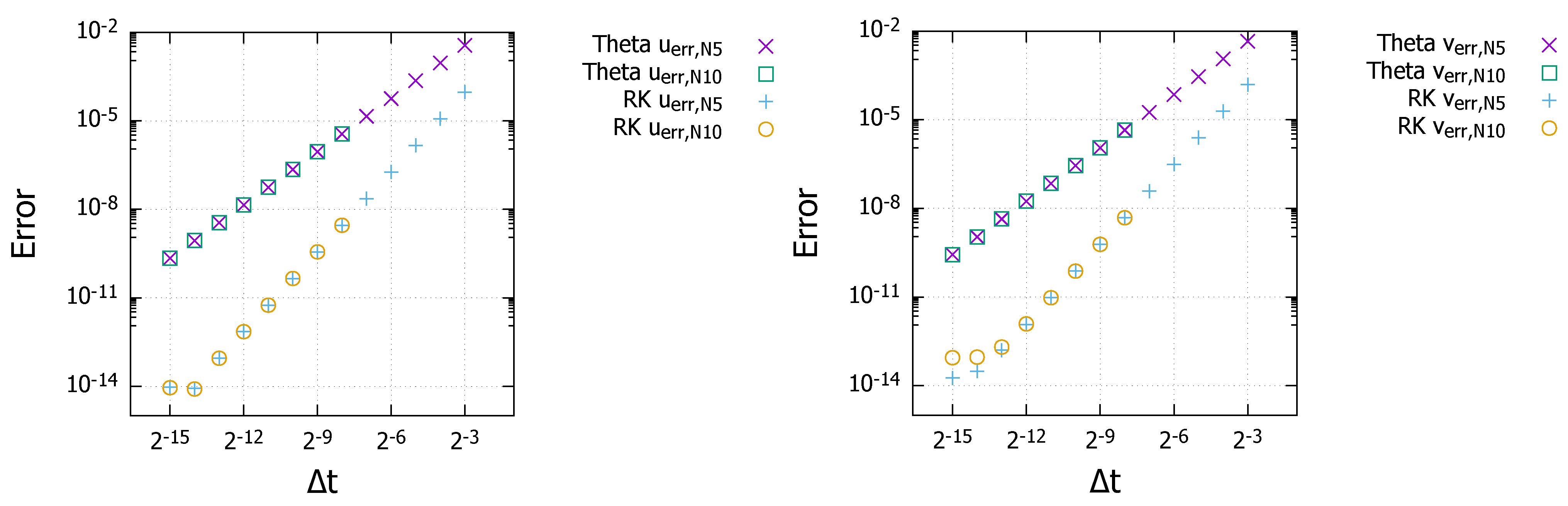
4.2.2. Accuracy Depending on Discretization of Time Variables
4.2.3. Accuracy Depending on Discretization of Spatial Variables
4.2.4. Convergence/Stability of Iteration
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Jacobian Elliptic Functions
References
- Bjorken, J.D.; Drell, S.D. Relativistic Quantum Fields; MacGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Boyd, J.P. Chebyshev and Fourier Spectral Methods Second Edition (Revised); Dover: New York, NY, USA, 2001. [Google Scholar]
- Abbasbandy, S.; Shivanian, E. Multiple solutions of mixed convection in a porous medium on semi-infinite interval using pseudo-spectral collocation method. Commun. Nonlinear Sci. Numer. Simulat. 2011, 16, 2745–2752. [Google Scholar] [CrossRef]
- Fornberg, B. A Practical Guide to Pseudospectral Methods; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Pasciak, J.E. Spectral and Pseudo Spectral Methods for Advection Equations. Math. Comput. 1980, 35, 1081–1092. [Google Scholar] [CrossRef] [Green Version]
- Chantawansri, T.L.; Hur, S.M.; García-Cervera, C.J.; Ceniceros, H.D.; Fredrickson, G.H. Spectral collocation methods for polymer brushes. J. Chem. Phys. 2011, 134, 244905. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomez, H.; Reali, A.; Sangalli, G. Accurate, efficient, and (iso)geometrically flexible collocation methods for phase-field models. J. Comput. Phys. 2014, 262, 153–171. [Google Scholar] [CrossRef]
- Ai, Q.; Li, H.Y.; Wang, Z.Q. Diagonalized Legendre spectral methods using Sobolev orthogonal polynomials for elliptic boundary value problems. Appl. Numer. Math. 2018, 127, 196–210. [Google Scholar] [CrossRef]
- Patera, A.T. A spectral element method for fluid dynamics: Laminar flow in a channel expansion. J. Comput. Phys. 1984, 54, 468–488. [Google Scholar] [CrossRef]
- Jafarzadeh, S.; Larios, A.; Bobaru, F. Efficient Solutions for Nonlocal Diffusion Problems via Boundary-Adapted Spectral Methods. J. Peridyn. Nonlocal Model. 2020, 2, 85–110. [Google Scholar] [CrossRef] [Green Version]
- Hesthaven, J.S. Spectral penalty methods. Appl. Numer. Math. 2000, 33, 23–41. [Google Scholar] [CrossRef]
- Cordero-Carrión, I.; Cerdá-Durán, P. Partially implicit Runge-Kutta methods for wave-like equations. In Advances in Differential Equations and Applications; Casas, F., Martínez, V., Eds.; SEMA SIMAI Springer Series 4; Springer: Cham, Switzerland, 2012. [Google Scholar]
- Wang, H.; Zhang, Q.; Shu, C.W. Third order implicit–explicit Runge-Kutta local discontinuous Galerkin methods with suitable boundary treatment for convection–diffusion problems with Dirichlet boundary conditions. J. Comput. Appl. Math. 2018, 342, 164–179. [Google Scholar] [CrossRef]
- Zhao, W.; Huang, J. Boundary treatment of implicit-explicit Runge-Kutta method for hyperbolic systems with source terms. J. Comput. Phys. 2020, 423, 109828. [Google Scholar] [CrossRef]
- Masud Rana, M.; Howle, V.E.; Long, K.; Meek, A.; Milestone, W. A New Block Preconditioner for Implicit Runge-Kutta Methods for Parabolic PDE Problems. SIAM J. Sci. Comput. 2020, 43, S475–S495. [Google Scholar] [CrossRef]
- Mardal, K.A.; Nilssen, T.K.; Staff, G.A. Order-optimal preconditioners for implicit Runge-Kutta schemes applied to parabolic PDEs. SIAM J. Sci. Comput. 2007, 29, 361–375. [Google Scholar] [CrossRef] [Green Version]
- Staff, G.A.; Mardal, K.A.; Nilssen, T.K. Preconditioning of fully implicit Runge-Kutta schemes for parabolic PDEs. Model. Identif. Control. 2006, 27, 109–123. [Google Scholar] [CrossRef] [Green Version]
- Butcher, J.C. The Numerical Analysis of Ordinary Differential Equations: Runge-Kutta and General Linear Methods; John Wiley and Sons: New York, NY, USA, 1987. [Google Scholar]
- Gottlieb, D.; Orszag, S.A. Numerical Analysis of Spectral Methods: Theory and Applications; SIAM-CBMS: Philadelphia, PA, USA, 1997. [Google Scholar]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods in Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 1986. [Google Scholar]
- Iwata, Y.; Takei, Y. Numerical scheme based on the spectral method for calculating nonlinear hyperbolic evolution equations. In Proceedings of the ICCMS ’20; ACM Digital Library: New York, NY, USA, 2020; pp. 25–30. ISBN 978-1-4503-7703-4. (In English) [Google Scholar]
- Hairer, E.; Wanner, G. Stiff differential equations solved by Radau methods. J. Comput. Appl. Math. 1999, 111, 93–111. [Google Scholar] [CrossRef]
- Hairer, E.; Nørsett, S.P.; Wanner, G. Solving Ordinary Differential Equations I, Nonstiff Problems; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Wanner, G.; Hairer, E. Solving Ordinary Differential Equations II: Stiff Problems; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Jackson, E.A. Perspectives of Nonlinear Dynamics 1 and 2; Cambrdge University Press: Cambrdge, UK, 1991. [Google Scholar]
- Takei, Y.; Iwata, Y. Space-time breather solution for nonlinear Klein-Gordon equations. J. Phys. Conf. Ser. 2021, 1730, 012058. [Google Scholar] [CrossRef]
- Takei, Y.; Iwata, Y. Stationary analysis for coupled nonlinear Klein-Gordon equations. arXiv 2021, arXiv:2109.11038. [Google Scholar]
- Jacobi, C.G.J. Fundamenta Nova Theoriae Functionum Ellipticarum; Borntraeger: Kaliningrad, Russia, 1829; Reprinted by Cambridge University Press: Cambridge, UK, 2012; ISBN 978-1-108-05200-9. (In Latin) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | (a) Modified Ite. Count | (b) Normal Ite. Count | (a)/(b) | ||
|---|---|---|---|---|---|
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| 4 | 6 | ||||
| 4 | 6 | ||||
| 4 | 5 |
| N | (a) Modified Ite. Count | (b) Normal Ite. Count | (a)/(b) | ||
|---|---|---|---|---|---|
| N/A | N/A | N/A | |||
| 7 | 11 | ||||
| 6 | 9 | ||||
| 5 | 8 | ||||
| 5 | 7 | ||||
| 4 | 7 | ||||
| 4 | 6 | ||||
| 4 | 6 | ||||
| 4 | 5 |
| N | (a) Modified Ite. Count | (b) Normal Ite. Count | (a)/(b) | ||
|---|---|---|---|---|---|
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| N/A | N/A | N/A | |||
| 11 | 16 | ||||
| 4 | 6 | ||||
| 4 | 5 |
| N | (a) Modified Ite. Count | (b) Normal Ite. Count | (a)/(b) | ||
|---|---|---|---|---|---|
| N/A | N/A | N/A | |||
| 13 | 24 | ||||
| 8 | 14 | ||||
| 6 | 10 | ||||
| 6 | 9 | ||||
| 5 | 7 | ||||
| 4 | 7 | ||||
| 4 | 6 | ||||
| 4 | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takei, Y.; Iwata, Y. Numerical Scheme Based on the Implicit Runge-Kutta Method and Spectral Method for Calculating Nonlinear Hyperbolic Evolution Equations. Axioms 2022, 11, 28. https://doi.org/10.3390/axioms11010028
Takei Y, Iwata Y. Numerical Scheme Based on the Implicit Runge-Kutta Method and Spectral Method for Calculating Nonlinear Hyperbolic Evolution Equations. Axioms. 2022; 11(1):28. https://doi.org/10.3390/axioms11010028
Chicago/Turabian StyleTakei, Yasuhiro, and Yoritaka Iwata. 2022. "Numerical Scheme Based on the Implicit Runge-Kutta Method and Spectral Method for Calculating Nonlinear Hyperbolic Evolution Equations" Axioms 11, no. 1: 28. https://doi.org/10.3390/axioms11010028
APA StyleTakei, Y., & Iwata, Y. (2022). Numerical Scheme Based on the Implicit Runge-Kutta Method and Spectral Method for Calculating Nonlinear Hyperbolic Evolution Equations. Axioms, 11(1), 28. https://doi.org/10.3390/axioms11010028