
Delay-Dependent Stability, Integrability and Boundedeness Criteria for Delay Differential Systems




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- We study the uniformly asymptotic stability of zero solution and the integrability of the norm of solutions of the following unperturbed nonlinear system of DDEs via Theorem 3 and Theorem 4, respectively:To investigate these problems, we define a very different LKF from that in Ren and Tian [16];
- (2)
- We investigate the boundedness of solutions of the perturbed system of nonlinear DDEs (2), see Theorem 5’
- (3)
- In particular cases, two new examples with graphs of their solutions are provided to show applications of Theorems 3–5.
2. Background and Motivation
- (A1)
- The functionsatisfies the locally Lipschitz in x, i.e., for every compactand, there exists awithsuch that:for alland;
- (A2)
- Letbe a functional such that it satisfies the one-side locally Lipschitz in t:whenever, whereis continuous;
- (A3)
- There are four strictly increasing functions ω,,,with value 0 at 0 such that:andwheneverand. Then, the solutionof the system of DDEs (5) is uniformly asymptotically stable.
3. Asymptotic Stability
4. Uniformly Asymptotic Stability and Integrability
- (C1)
- There exist positive constants,, andsuch that:and
- (C2)
- There exist constants, ,andfrom (C1) and (2), respectively, andsuch that:Then zero solution of the unperturbed system of DDEs (4) is uniformly asymptotically stable.
5. Boundedness of Solutions
- (C3)
- There exist positive constants , , , , from (C1) and (C2), L and a continuous function such that:where:
6. Discussion and Contribution
- (1)
- The nonlinear perturbed system of DDEs (2) extend and improve the linear system of DDEs (1) (see Tian and Ren [33], Theorem 1) from a linear system of the DDEs with a time-varying delay to the a class of non-linear systems of DDEs with three multiple time-varying delays. Next, in the main result of Tian and Ren ([33], Theorem 1), see the above Theorem 2, the satisfaction of the following LMI is very difficult:since the matrix has numerous terms. This fact can be seen clearly, when we look at ([33], Theorem 1) and the above Theorem 2. Hence, it is clear that this condition can lead conservatism, computational complexity, and difficulty in application fields. However, here, we have very simple conditions, (C1) and (C2) for our stronger result of uniformly asymptotically stability, Theorem 3, instead of asymptotically stability result in ([33], Theorem 1). For sake of brevity, there is no need for more information
- (2)
- To prove Theorem 1, the following LKF ,withis defined by Ren and Tian ([33], Theorem 1). Instead of the LKF (15), we defined the following LKF:In spite of the non-linear unperturbed system of DDEs (2) having three multiple time-varying delays, the LKF (16) is very simple and more convenient and effective. For the particular case of our theorem, Theorem 3, to get the main result of Ren and Tian ([33], Theorem 1) under very less conservative and optimal conditions, we need the following LKF:which is a particular case of the LKF (16).
- (3)
- In Ren and Tian ([33], Theorem 1), differentiating the LKF (15) and using the system of DDEs (1), it was derived that:withHowever, let . It is interesting that calculating the time derivative of the LKF given by (17) and using the system of DDEs (1), we obtain:The equality (20) has a very simple form than those given by (18) and (19). Indeed, the inequality (20) leads very to less conservative conditions for the negative definiteness of the time derivative than those given by Ren and Tian ([33], Theorem 1) for the negative definiteness of . Here, we would not like to give the details of the discussions for the sake of brevity. The less restrictive conditions of Theorem 3 can be followed with a comparison made between the conditions of Ren and Tian ([33], Theorem 1) and our Theorem 3.
- (4)
- To prove Theorem 2, which is given above, firstly, three lemmas, Lemmas 1–3, are given by Ren and Tian [33]. Then, based upon the integral and matrix inequalities therein, a new delay-dependent stability criterion via Theorem 2 is proven in terms of a linear matrix inequality, see Ren and Tian [33], Theorem 1.In this paper, we define a more suitable LKF (6) and depend upon Burton [1], (Theorem 4. 2.9), to prove Theorems 3–5. From this point of view, Ren and Tian ([33], Theorem 1) investigated the asymptotic stability of the linear system of DDEs (1). Here, we investigate the uniformly asymptotically stability of the zero solution and integrability of the norm of solutions of an unperturbed system of DDEs (4) as well as the boundedness of solutions of the perturbed system of DDEs (2). The result of Theorem 3, the uniformly asymptotically stability includes and implies the asymptotic stability of the linear system of DDEs (1), i.e., but the converse is not true.As a brief summary, here, we extend and improve the result of Ren and Tian ([33], Theorem 1), and obtain this result under very less conservative conditions and make it more optimal than before. Next, we also obtain two new results on the qualitative properties of the nonlinear unperturbed system of DDEs (4) and as well as the nonlinear perturbed system of DDEs (2), (see Theorems 4 and 5). The applicability of our results can be done easily because of the form of the new less restrictive conditions of Theorems 3–5.
- (5)
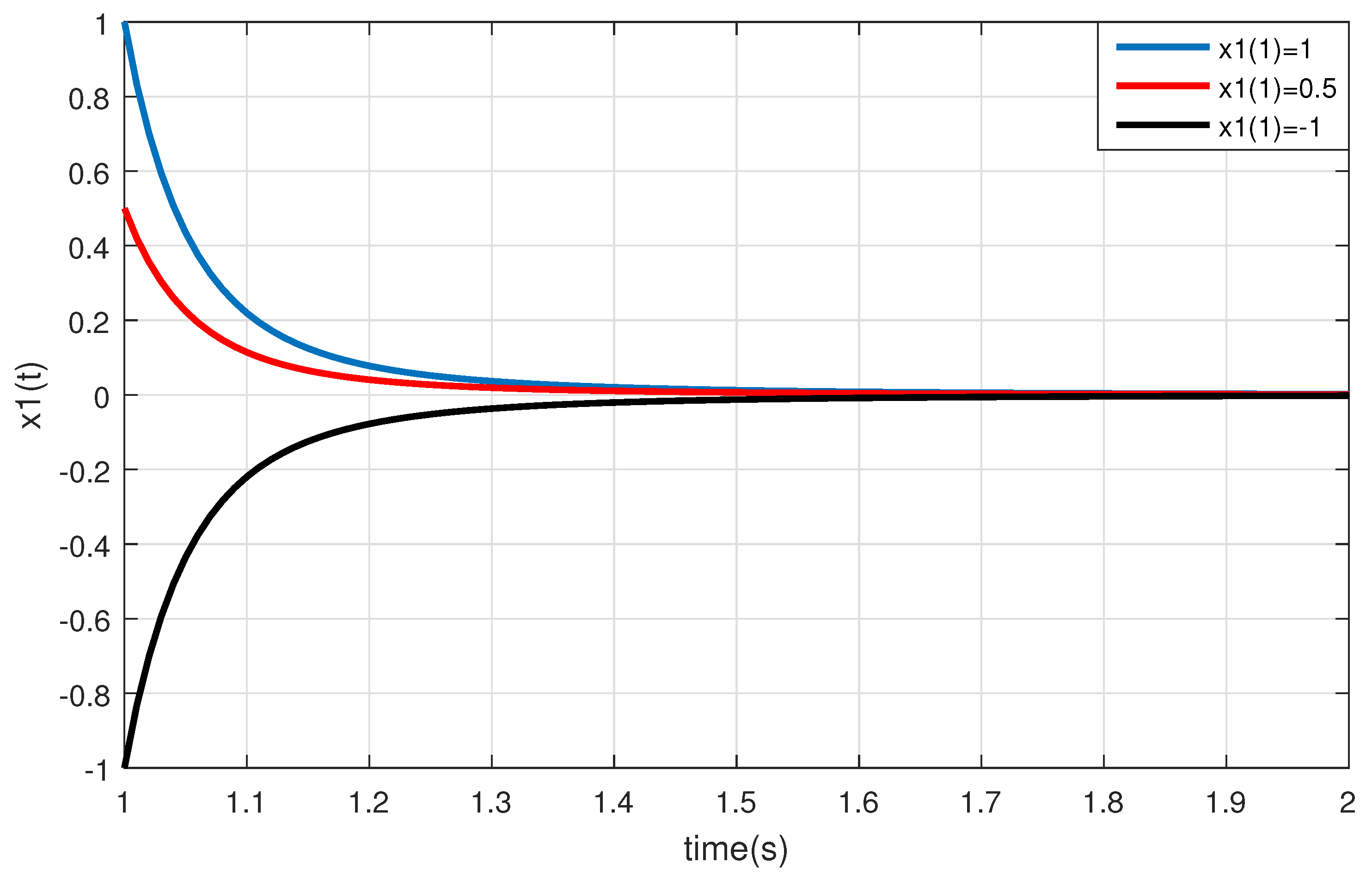
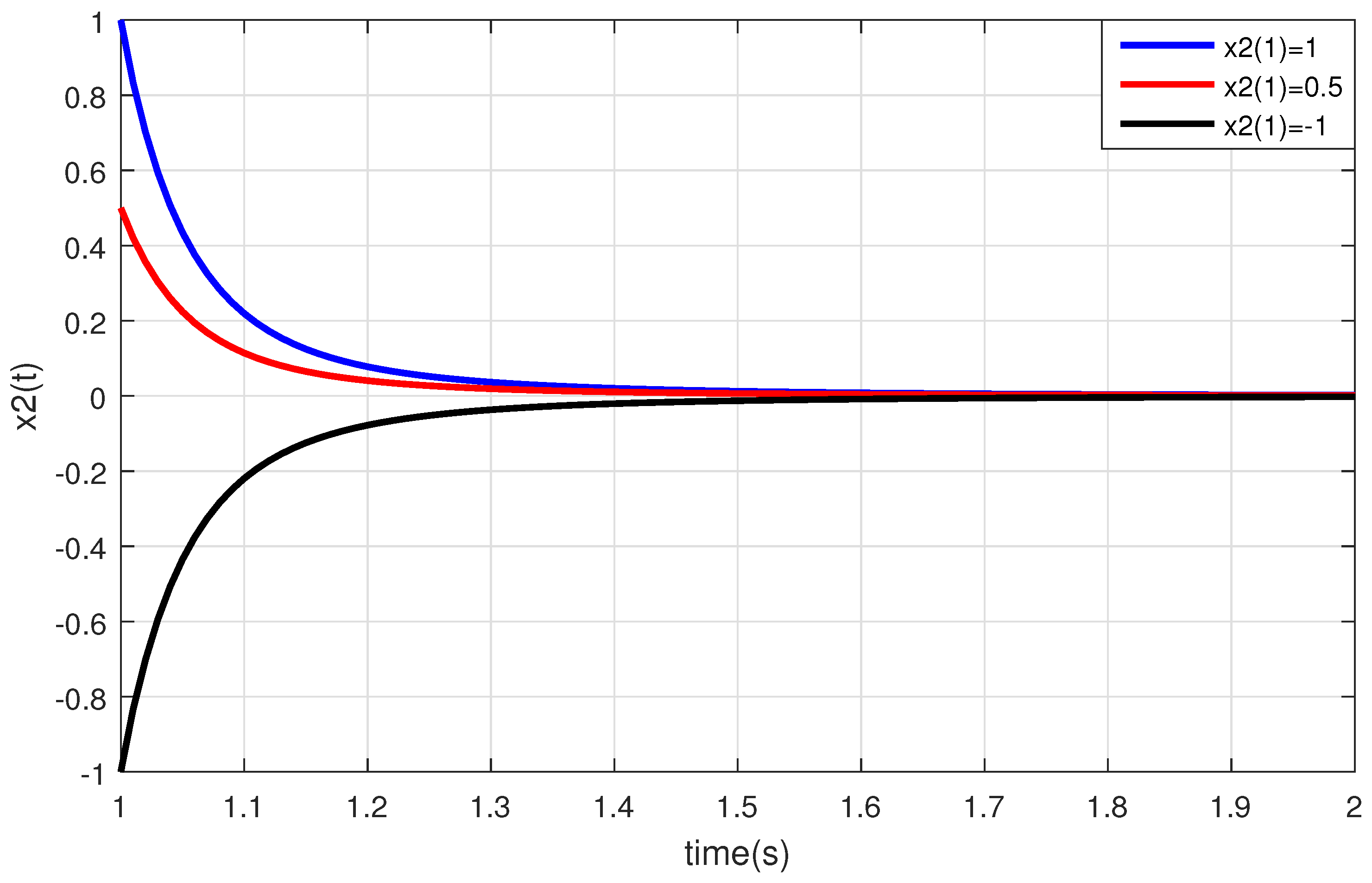
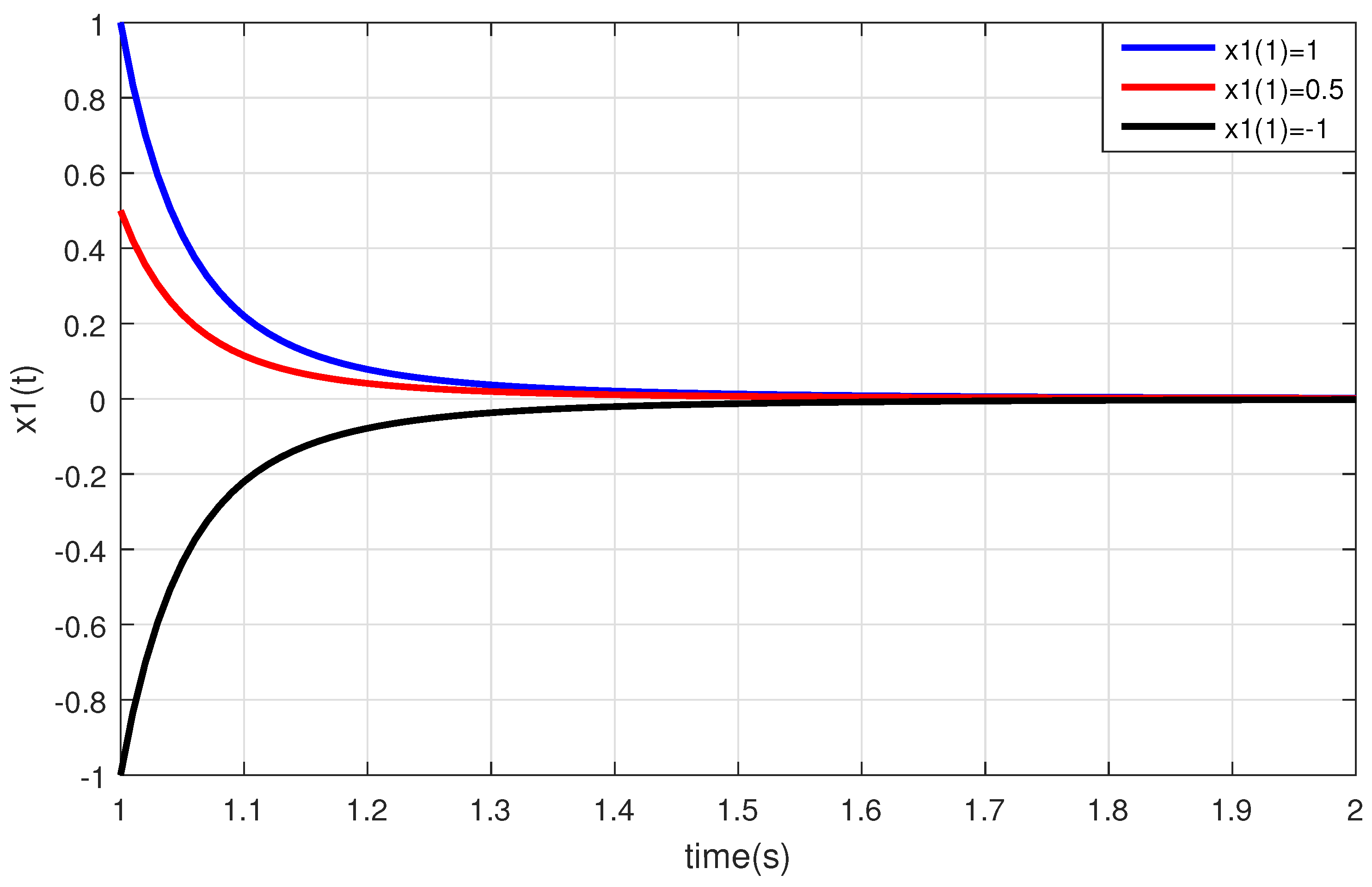
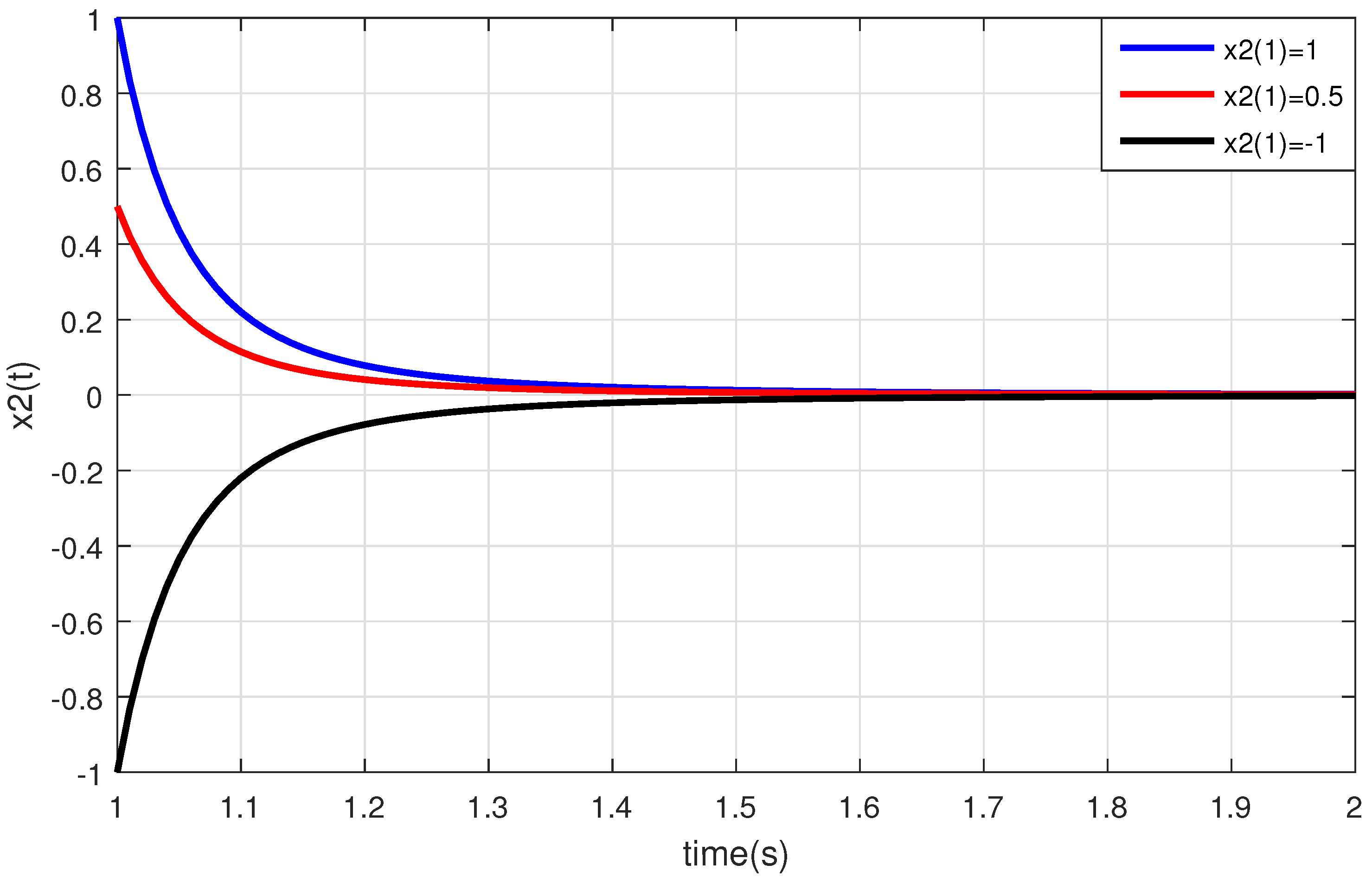
- In this particular case, two nonlinear Examples 1 and 2 with two and three time-varying delays, respectively, are given. These examples satisfy the conditions of Theorems 3–5 and they were solved depending upon the 4th order Runge–Kutta method. The trajectories of these examples are plotted by MATLAB software. The stability, integrability, and boundedness of the solutions can be followed clearly.
- (6)
- An advantage of the new and optimal LKF (6) used in the proof of Theorem 5 is to eliminate using Gronwall’s inequality for the boundedness of solutions at infinity. A comparison of Theorems 3–5 and those in the literature also shows that the conditions of Theorems 3–5 are more general, simple, and convenient for applications.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Burton, T.A. Stability and Periodic Solutions of Ordinary and Functional Differential Equations; Corrected Version of the 1985 Original; Dover Publications, Inc.: Mineola, NY, USA, 2005. [Google Scholar]
- Hale, J.K.; Lunel, S.M.V. Introduction to functional-differential equations. In Applied Mathematical Sciences; Springer: New York, NY, USA, 1993; p. 99. [Google Scholar]
- Kiri, Y.; Ueda, Y. Stability criteria for some system of delay differential equations. In Theory, Numerics and Applications of Hyperbolic Problems II; Springer Processing In Mathematics amd Statistics, 237; Springer: Cham, Switzerland, 2016; pp. 137–144. [Google Scholar]
- Kolmanovskii, V.; Myshkis, A. Applied theory of functional-differential equations. In Mathematics and Its Applications; Soviet Series 85; Kluwer Academic Publishers Group: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Kuang, Y. Delay differential equations with applications in population dynamics. In Mathematics in Science and Engineering; Academic Press, Inc.: Boston, MA, USA, 1993; p. 191. [Google Scholar]
- Lakshmikantham, V.; Wen, L.Z.; Zhang, B.G. Theory of differential equations with unbounded delay. In Mathematics and Its Applications; Kluwer Academic Publishers Group: Dordrecht, The Netherlands, 1994; p. 298. [Google Scholar]
- Smith, H. An Introduction to Delay Differential Equations with Applications to the Life Sciences; Texts in Applied Mathematics 57; Springer: New York, NY, USA, 2011. [Google Scholar]
- Berezansky, L.; Braverman, E.; Idels, L. New global exponential stability criteria for nonlinear delay differential systems with applications to BAM neural networks. Appl. Math. Comput. 2014, 243, 899–910. [Google Scholar] [CrossRef]
- Gil’, M.I. Exponential stability of nonlinear non-autonomous multivariable systems. Discuss. Math. Differ. Incl. Control Optim. 2015, 35, 89–100. [Google Scholar] [CrossRef]
- Berezansky, L.; Diblík, J.; Svoboda, Z.; Šmarda, Z. Simple uniform exponential stability conditions for a system of linear delay differential equations. Appl. Math. Comput. 2015, 250, 605–614. [Google Scholar] [CrossRef]
- Gözen, M.; Tunç, C. A new result on exponential stability of a linear differential system of first order with variable delays. Nonlinear Stud. 2020, 27, 275–284. [Google Scholar]
- Liu, B. Global stability of a class of non-autonomous delay differential systems. Proc. Am. Math. Soc. 2010, 138, 975–985. [Google Scholar] [CrossRef]
- Matsunaga, H. Delay-dependent and delay-independent stability criteria for a delay differential system. Proc. Am. Math. Soc. 2008, 136, 4305–4312. [Google Scholar] [CrossRef]
- Ngoc, P.H.A. Stability of nonlinear differential systems with delay. Evol. Equ. Control Theory 2015, 4, 493–505. [Google Scholar] [CrossRef][Green Version]
- Petruşel, A.; Petruxsxel, G.; Yao, J. Existence and stability results for a system of operator equations via fixed point theory for non-self orbital contractions. J. Fixed Point Theory Appl. 2019, 21, 18. [Google Scholar] [CrossRef]
- Rebenda, J.; Šmarda, Z. Stability of a functional differential system with a finite number of delays. Abstr. Appl. Anal. 2013, 2013, 853134. [Google Scholar] [CrossRef]
- Shu, F.C. Stability of a 2-dimensional irreducible linear system of delay differential equations. Appl. Math. E Notes 2012, 12, 36–43. [Google Scholar]
- Slyn’ko, V.I.; Tunç, C. Instability of set differential equations. J. Math. Anal. Appl. 2018, 467, 935–947. [Google Scholar] [CrossRef]
- Tunç, C. A note on boundedness of solutions to a class of non-autonomous differential equations of second order. Appl. Anal. Discrete Math. 2010, 4, 361–372. [Google Scholar] [CrossRef]
- Tunç, C. Uniformly stability and boundedness of solutions of second order nonlinear delay differential equations. Appl. Comput. Math. 2011, 10, 449–462. [Google Scholar]
- Tunç, C. Stability to vector Liénard equation with constant deviating argument. Nonlinear Dynam. 2013, 73, 1245–1251. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. A note on certain qualitative properties of a second order linear differential system. Appl. Math. Inf. Sci. 2015, 9, 953–956. [Google Scholar]
- Tunç, C.; Tunç, O. On the boundedness and integration of non-oscillatory solutions of certain linear differential equations of second order. J. Adv. Res. 2016, 7, 165–168. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Tunç, C.; Tunç, O. A note on the stability and boundedness of solutions to non-linear differential systems of second order. J. Assoc. Arab Univ. Basic Appl. Sci. 2017, 24, 169–175. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. Qualitative analysis for a variable delay system of differential equations of second order. J. Taibah Univ. Sci. 2019, 13, 468–477. [Google Scholar] [CrossRef]
- Tunç, C.; Golmankhaneh, A.K. On stability of a class of second alpha-order fractal differential equations. AIMS Math. 2020, 5, 2126–2142. [Google Scholar] [CrossRef]
- Yskak, T. Stability of solutions to systems of differential equations with distributed delay. Funct. Differ. Equ. 2018, 25, 97–108. [Google Scholar]
- Zhang, H.; Jiang, W. Global exponential stability to a class of differential system with delay. Ann. Differ. Equ. 2007, 23, 564–569. [Google Scholar]
- Zhang, S.; Wu, S. Stability of delay differential systems by several Liapunov functions. Ann. Differ. Equ. 2001, 17, 86–92. [Google Scholar]
- Petruşel, A.; Rus, I.A. The Ulam-Hyers stability of an ordinary differential equation via Gronwall lemmas. Appl. Set Valued Anal. Optim. 2020, 2, 295–303. [Google Scholar]
- Kien, B.T.; Qin, X.; Wen, C.F. L∞-stability for a class of parametric optimal control problems with mixed pointwise constraints. J. Appl. Numer. Optim. 2020, 2, 297–320. [Google Scholar]
- Chadli, O.; Koukkous, A.; Saidi, A. Existence of anti-periodic solutions for nonlinear implicit evolution equations with time dependent pseudomonotone operators. J. Nonlinear Var. Aanl. 2017, 1, 71–88. [Google Scholar]
- Ren, Z.; Tian, J. Stability analysis of systems with interval time-varying delays via a new integral inequality. Complexity 2020, 2020, 2854293. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tunç, O.; Tunç, C.; Wang, Y. Delay-Dependent Stability, Integrability and Boundedeness Criteria for Delay Differential Systems. Axioms 2021, 10, 138. https://doi.org/10.3390/axioms10030138
Tunç O, Tunç C, Wang Y. Delay-Dependent Stability, Integrability and Boundedeness Criteria for Delay Differential Systems. Axioms. 2021; 10(3):138. https://doi.org/10.3390/axioms10030138
Chicago/Turabian StyleTunç, Osman, Cemil Tunç, and Yuanheng Wang. 2021. "Delay-Dependent Stability, Integrability and Boundedeness Criteria for Delay Differential Systems" Axioms 10, no. 3: 138. https://doi.org/10.3390/axioms10030138
APA StyleTunç, O., Tunç, C., & Wang, Y. (2021). Delay-Dependent Stability, Integrability and Boundedeness Criteria for Delay Differential Systems. Axioms, 10(3), 138. https://doi.org/10.3390/axioms10030138