
The Future of City Squares: Robotics in the Urban Design of Tomorrow

Abstract
1. Introduction
1.1. The Role of Changeability in Public Spaces
1.2. New Industrial Tools

1.3. ROBOneighborhood
2. Materials and Methods
- Accessibility, based on research and experience gathered during the ROBOsenior courses in 2017/2018 and 2018/2019 [26];
- Private and public transportation of the future in a responsive city;
- Anticipated social changes related to the post-industrial revolution, including employment structure and users’ lifestyles;
- The change of geometry as a response to changing urban conditions;
- The modularization, prefabrication and assembly of architectural elements.
Information about the Process
- dR 1 involved a situated user case study, which studied the specific needs of the future city square users. In this part, students participated in a workshop including a presentation on a social science study on the design process presented by Ewa Majdecka, a sociologist studying Warsaw’s urban space;
- dR 2 comprised the urban modules’ precedent study/technology, which investigated the innovative precedents, new technologies and materials for making the prefab structures dedicated to the public space. In this part, students were supported by an engineer specializing in mechatronics.
- PS1: The first problem set involved the design of the fragment, i.e., a mechatronic element significant to the city square users. Students were expected to prepare an animation illustrating the mechanical principle of a design and the logic diagram of its mechatronic system. The design of bottom-up fragments/elements was to be followed by the integration with PS2;
- PS2: The second design problem involved the design of a future city square, as a systemic, prefabricated, multipurpose container using experimental technologies such as carbon fiber or cocoon-type air frames. The design of the future city square had to be adapted to the needs of seniors and people with disabilities, taking into account changes in the city transport system (private and public) as well as employment structures. The top-down design of the future city square followed an integration with the PS1;
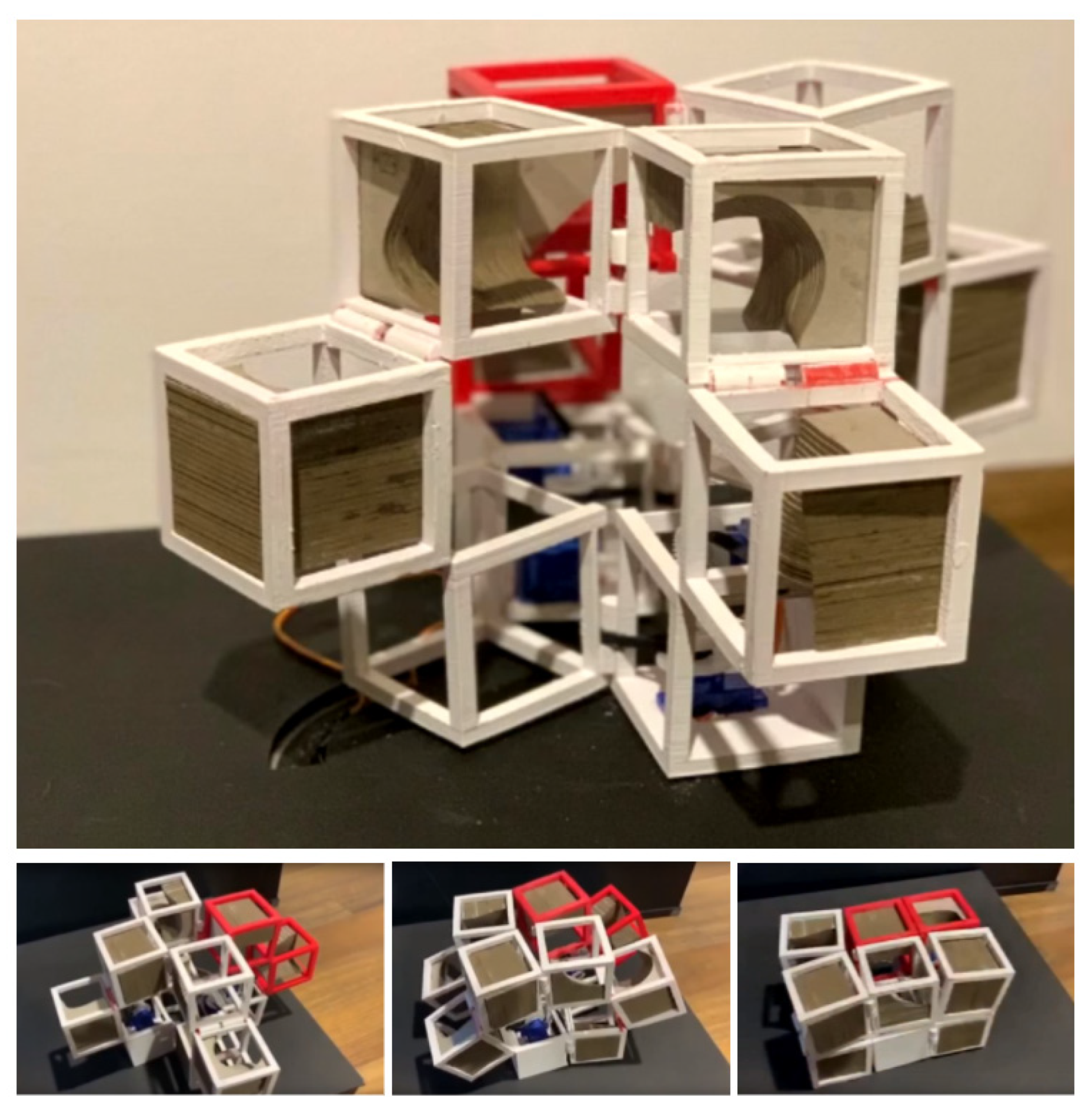
- PS3: The third, short design problem set required designing and building a reductive interactive model of the previously considered project element or detail. The scaled prototype of the fragment had to be schematic, diagrammatic and interactive. The electronic components were provided as well as an introduction to Arduino programming.
3. Results
3.1. Case Study of Students’ Projects
3.1.1. Transport: The Snap Hub
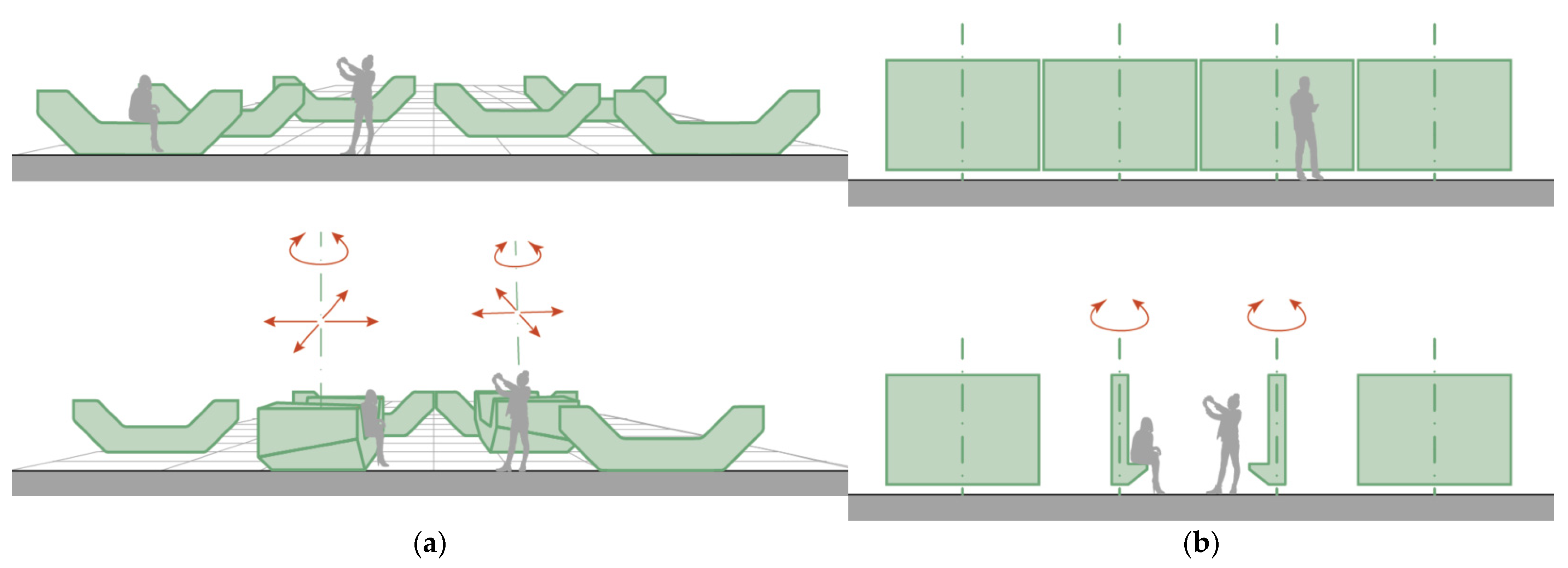
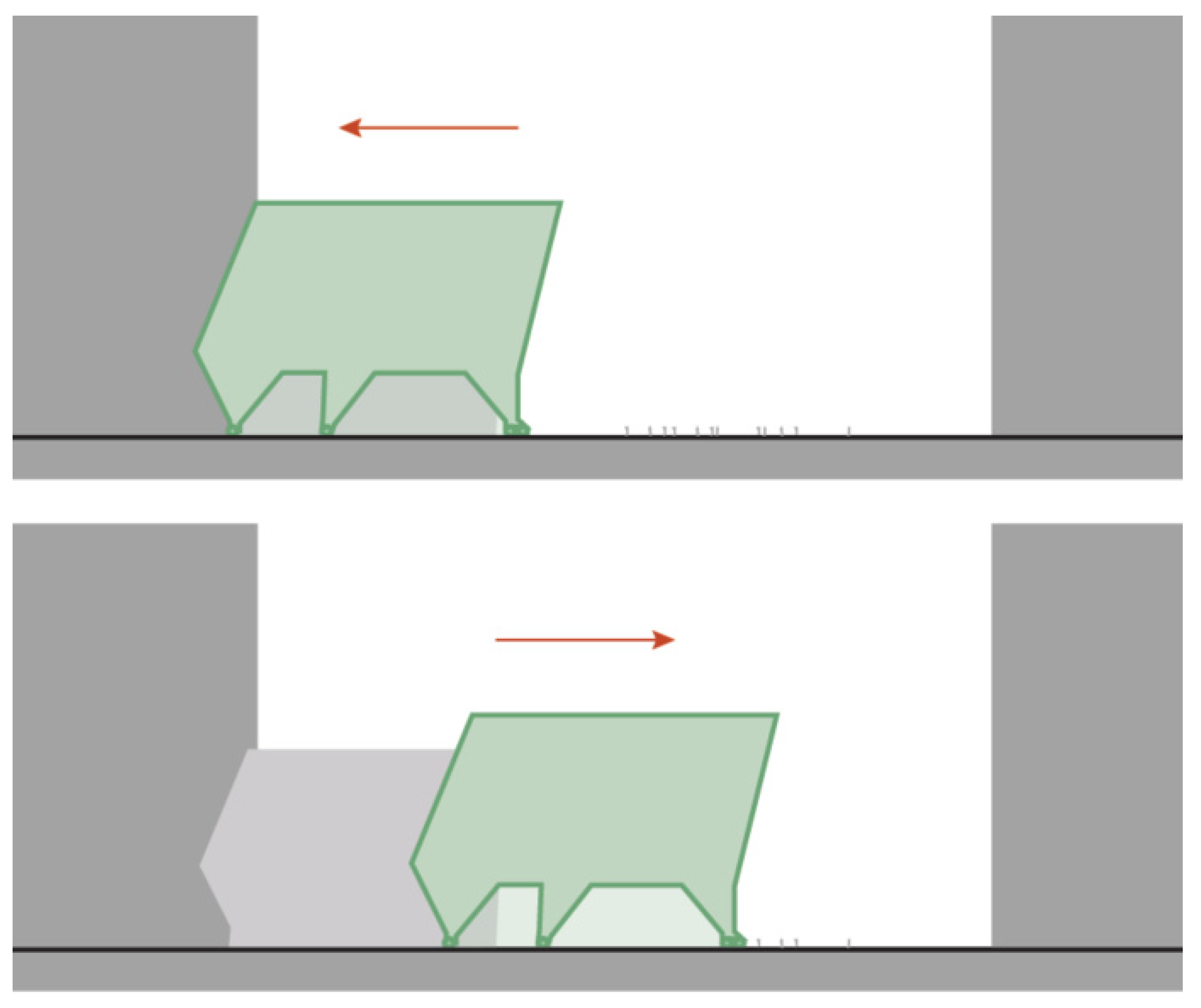
3.1.2. Rhythm of the Day: The Modulequare
3.1.3. City Events
3.1.4. Weather/Climate: The Urban Umbrella
3.1.5. Comparison of the Data Used for System Control and User Safety
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schumacher, M.; Schaeffer, O.; Vogt, M.-M. Hoberman Arch. In Move: Architecture in Motion-Dynamic Componenets and Elements; Birkhäuser Architecture: Basel, Switzerland; Boston, MA, USA; Berlin, Germany, 2012; pp. 222–223. [Google Scholar]
- Aghamolaei, R. Urban renewal with a cultural approach. MANZAR Sci. J. Landsc. 2017, 9, 50–59. [Google Scholar]
- Interboro, Lentspace. Available online: https://www.interboropartners.com/projects/lentspace (accessed on 28 August 2021).
- Diller Scofidio + Renfro, The Shed. Available online: https://dsrny.com/project/the-shed (accessed on 28 September 2021).
- Gannon, D. Watch the Shed, an 8-Million-Pound Structure, Glide Effortlessly alongside the High Line. 6sqft, 18 August 2017. Available online: https://www.6sqft.com/watch-the-hudson-yards-8-million-pound-arts-center-the-shed-glide-effortlessly/ (accessed on 29 September 2021).
- Global Agenda Council on the Future of Cities. Top Ten Urban; World Economic Forum: Geneva, Switzerland, 2015. [Google Scholar]
- Anderson, W.B. Physics for Technical Students: Mechanics and Heat; McGraw Hill: New York, NY, USA, 1914. [Google Scholar]
- Ramzy, N. Sustainable spaces with psychological values: Historical architecture as reference book for biomimetic models with biophilic qualities. Int. J. Archit. Res. ArchNet-IJAR 2015, 9, 248–267. [Google Scholar] [CrossRef]
- Lansdown, J.; Maver, T. CAD in architecture and building. Comput.-Aided Des. 1984, 3, 148–154. [Google Scholar] [CrossRef]
- Reichert, S.; Menges, A.; Correa, D. Meteorosensitive architecture: Biomimetic building skins based on materially embedded and hygroscopically enabled responsiveness. Comput.-Aided Des. 2015, 60, 50–59. [Google Scholar] [CrossRef]
- Баркалин, В. Acoustic properties of carbon nanotube arrays as chemical sensor elements. Rev. Adv. Mater. Sci. 2009, 20, 28–36. [Google Scholar]
- Hermann, M.; Pentek, T.; Otto, B. Design Principles for Industrie 4.0 Scenarios: A Literature Review. Tech. Univ. Dortm. Dortm. 2015, 45. [Google Scholar]
- Baheti, R.; Gill, H. Cyber-physical systems. Impact Control. Technol. 2011, 12, 161–166. [Google Scholar]
- Rada, M. Medium-INDUSTRY 5.0 Definition, 3 Luty 2018. Available online: https://medium.com/@michael.rada/industry-5-0-definition-6a2f9922dc48 (accessed on 25 September 2020).
- Atwell, C. Machine Design. 2017. Available online: https://www.machinedesign.com/automation-iiot/article/21835933/yes-industry-50-is-already-on-the-horizon (accessed on 25 September 2020).
- Stankosky, M. Global Forum-Convergence of Ideas, Industry 6.0, Październik 2019. Available online: http://globalforum.items-int.com/gf/gf-content/uploads/2019/10/GF-2019-Michael-Stankosky.pdf (accessed on 25 September 2020).
- Minoli, D.; Sohraby, K.; Occhiogrosso, B. IoT considerations, requirements, and architectures for smart buildings—Energy optimization and next-generation building management systems. IEEE Int. Things J. 2017, 4, 269–283. [Google Scholar] [CrossRef]
- Dąbrowska-Żółtak, K. Zmienność w Architekturze-Wczoraj, Dziś i Jutro. In Prace uczestników Konferencji Naukowej; Oficyna Wydawnicza Politechniki Wrocławskiej: Wrocław, Poland, 2020; pp. 7–22. [Google Scholar]
- Zuk, W.; Clark, R.H. Kinetic Architecture; Van Nostrand Reinhold: New York, NY, USA, 1970. [Google Scholar]
- Negroponte, N. Soft Architecture Machines; MIT Press: Cambridge, MA, USA, 1975. [Google Scholar]
- Sterk, T.D. Building upon Negroponte: A hybridized model of control suitable for responsive architecture. Autom. Constr. 2005, 2, 225–232. [Google Scholar] [CrossRef]
- Wojtowicz, J.; Johnson, G.; Meyboom, A. Architectronics: Towards a Responsive Environment. Int. J. Archit. Comput. 2011, 9, 77–98. [Google Scholar]
- Olszewski, M.; Wojtowicz, J.; Wrona, S.; Dąbrowska-Żółtak, K. Mechatronika in architekturze–architektronika. Pomiary Autom. Robot. 2017, 21, 11–25. [Google Scholar] [CrossRef]
- Roggema, R. Research by Design: Proposition for a Methodological Approach. Urban Sci. 2016, 12, 2. [Google Scholar] [CrossRef]
- Knapp, J.; Zeratsky, J.; Kowitz, B. Sprint: How to Solve Big Problems and Test New Ideas in Just Five Days; Simon & Schuster: New York, NY, USA, 2016. [Google Scholar]
- Dąbrowska-Żółtak, K.; Wojtowicz, J.; Wrona, S. Design and Automation for Seniors: Robot aided design of an environment for the elderly and disabled. In Proceedings of the eCAADe 2018 Computing for a Better Tomorrow, Łódź, Poland, 19–21 September 2018. [Google Scholar]
- Springer, K.; Han, S. Japan’s Crazy Underground Bike Vaults, CNN, 20 February 2016. Available online: https://edition.cnn.com/style/article/japan-underground-bike-vaults/index.html (accessed on 1 April 2022).
- Grunwald, G.; Hermeking, T.; Prang, T. Kinetic Roof Structure: Msheireb Heart of Doha. Procedia Eng. 2016, 155, 289–296. [Google Scholar] [CrossRef][Green Version]
- SL-Rasch. Madinah Piazza Shading Project-The Biggest Convertible Roof in the World. Available online: https://www.sl-rasch.com/en/projects/u-26-piazza/ (accessed on 28 August 2021).
- Dąbrowska-Żółtak, K.; Wojtowicz, J.; Wrona, S. Reconfigurable Neighborhood—Mechatronisation of the Urban Design. Sustainability 2021, 1, 13547. [Google Scholar] [CrossRef]
- Yiyong, C.; Tao, L.; Weibin, L. Increasing the use of large-scale public open spaces: A case study of the North Central Axis Square in Shenzhen, China. Habitat Int. 2016, 4, 66–77. [Google Scholar]
- Wilczek, I.; Tenczyński, M. Multifunctional Public Space As Exemplified By the Concept of the Development of Kopernik Square in Opole. In IOP Conference Series: Materials Science and Engineering; IOP Publishing Ltd.: Bristol, UK, 2017. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Kinetic Element Description | Illustration |
|---|---|---|---|
| 1 | Transport: The Snap Hub | Permanent city roofs, with modular kinetic elements, allowing the independent control of the opening of two layers responsible for shading and protection against noise, and protection against rainfall |  |
| 2 | Rhythm of The Day: The Modulequare | Kinetic floor, allowing the reorganization of the city square by changing its tectonics, including the creation of seats or walls separating a smaller fragment of the space |  |
| 3 | City Events | A kinetic city sculpture that is a landmark of a given space, with built-in utility functions: shaded seats, a summer cinema screen and a playground |  |
| 4 | Weather: The Urban Umbrella | A modular network of city umbrellas with the possibility of automatic retraction under the square floor. |  |
| Transport: The Snap Hub | Rhythm of the Day: The Modulequare | City Events | Weather: The Urban Umbrella | |
|---|---|---|---|---|
| Information about the location of people and vehicles | ||||
| The project involves collecting information on the movement of people and vehicles | ✔ | ✔ | ✔ | ✔ |
| Information about users was to be used in advance planning for the alignment of kinetic elements | ✔ | ✔ | ✔ | ✔ |
| The change of kinetic forms based on the current analysis of information collected in real time | ✔ | ✔ | - | - |
| Information used to determine patterns of behavior characteristics for a given space and to develop a schedule for changing the arrangement of kinetic elements | ✔ | ✔ | ✔ | ✔ |
| Information from sensors is one of the main security measures | - | ✔ | - | ✔ |
| The data complement other security measures | ✔ | - | ✔ | - |
| Information about weather and environmental conditions | ||||
| Precipitation | ✔ | - | ✔ | ✔ |
| Insolation | ✔ | - | - | ✔ |
| Noise | ✔ | - | - | - |
| Air pollution | ✔ | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dąbrowska-Żółtak, K.; Wojtowicz, J.; Wrona, S. The Future of City Squares: Robotics in the Urban Design of Tomorrow. Land 2022, 11, 1055. https://doi.org/10.3390/land11071055
Dąbrowska-Żółtak K, Wojtowicz J, Wrona S. The Future of City Squares: Robotics in the Urban Design of Tomorrow. Land. 2022; 11(7):1055. https://doi.org/10.3390/land11071055
Chicago/Turabian StyleDąbrowska-Żółtak, Karolina, Jerzy Wojtowicz, and Stefan Wrona. 2022. "The Future of City Squares: Robotics in the Urban Design of Tomorrow" Land 11, no. 7: 1055. https://doi.org/10.3390/land11071055
APA StyleDąbrowska-Żółtak, K., Wojtowicz, J., & Wrona, S. (2022). The Future of City Squares: Robotics in the Urban Design of Tomorrow. Land, 11(7), 1055. https://doi.org/10.3390/land11071055