
An Edge-Deployable Multi-Modal Nano-Sensor Array Coupled with Deep Learning for Real-Time, Multi-Pollutant Water Quality Monitoring


Abstract
1. Introduction
2. Materials and Methods
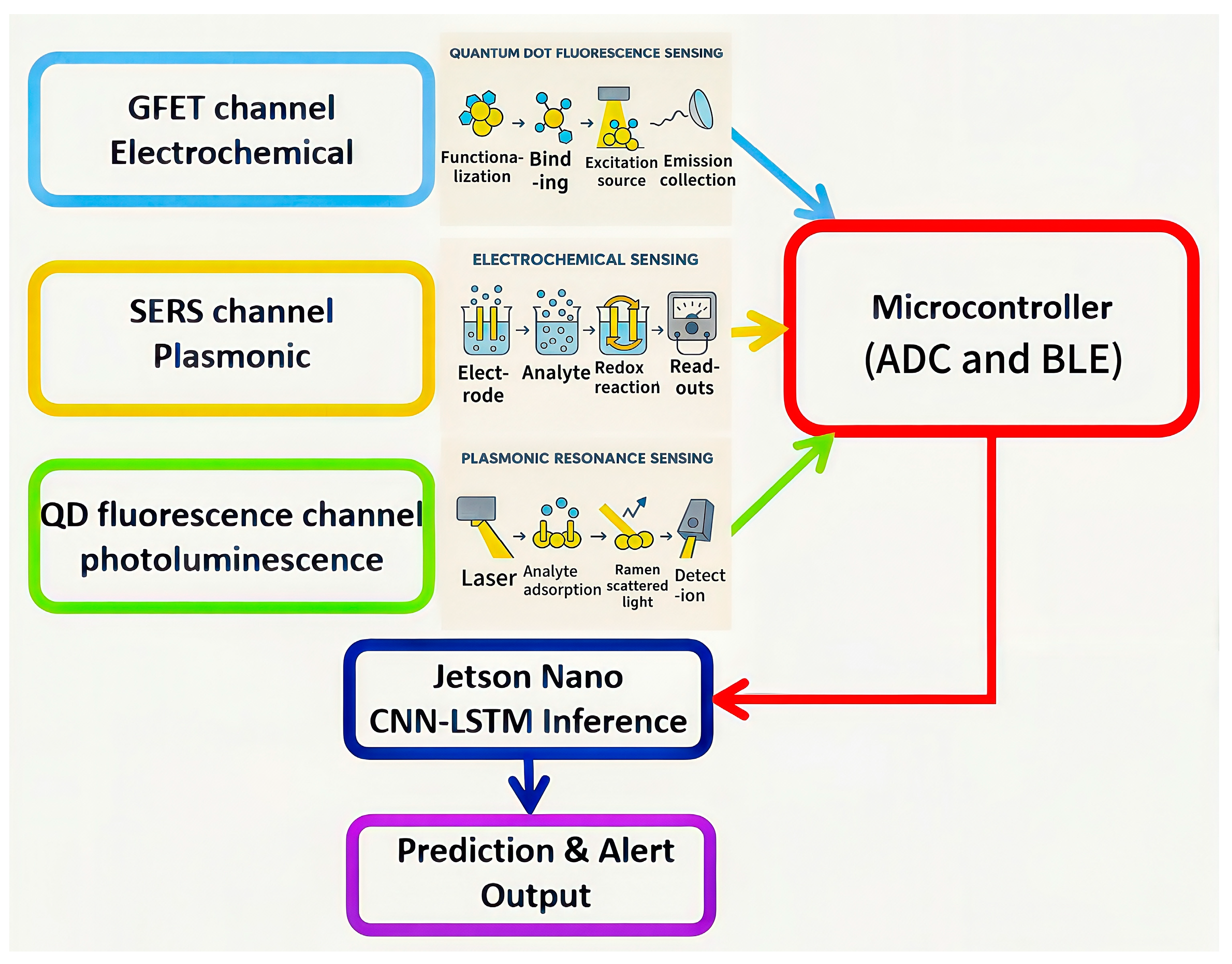
2.1. System Architecture Overview
2.2. Multi-Modal Nano-Sensor Array Design
2.2.1. Transduction Mechanisms and Target Allocation
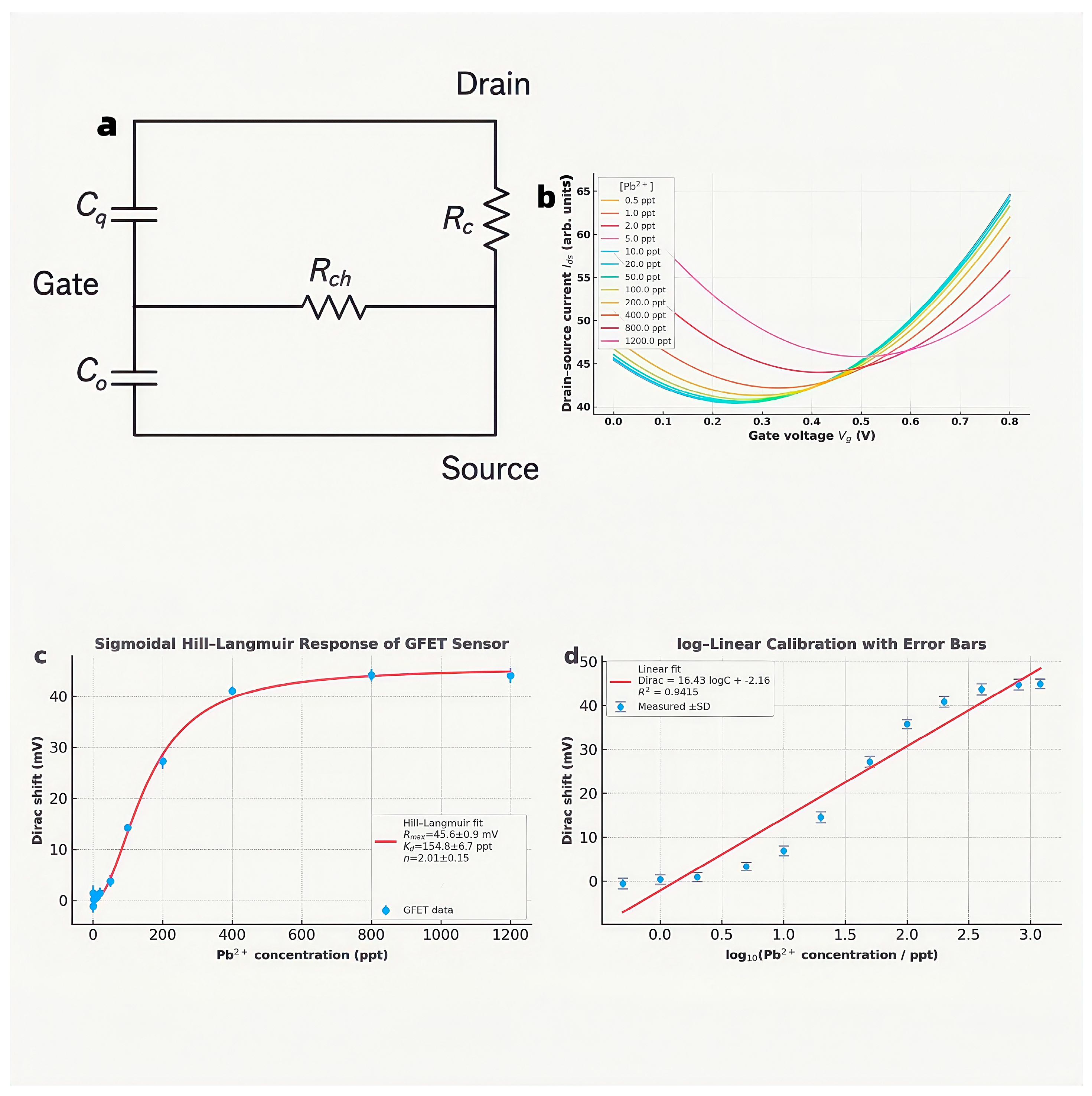
- GFET channel (electrochemical): Single-layer graphene grown by chemical vapour deposition (CVD) on Cu foil is transferred onto Si/SiO2 (300 nm) and patterned into 10 µm wide channels by photolithography. The Dirac-point shift (ΔVD) is used to quantify Pb2+ down to 5 ppt.
- SERS channel (vibrational): A densely packed Ag/Au nanostar monolayer (nanospike tip diameter ≈ 70 nm) is electrodeposited onto a glass slide coated with a 5 nm Ti/40 nm Au adhesion layer. The substrate yields an average enhancement factor of 1.1 × 107 at 785 nm excitation, permitting picomolar detection of pesticides (atrazine).
- QD fluorescence channel (photoluminescence): CdSe/ZnS core–shell QDs (peak emission wavelength, λem = 610 nm) are encapsulated in a sol–gel silica matrix and functionalised with poly(styrene sulphonate) to enhance affinity for microplastics and hydrophobic organic micropollutants; intensity quenching correlates linearly (R2 > 0.999) with nanoplastic concentration from 100 ng L−1 to 50 µg L−1.
2.2.2. Microfluidic Integration and Packaging
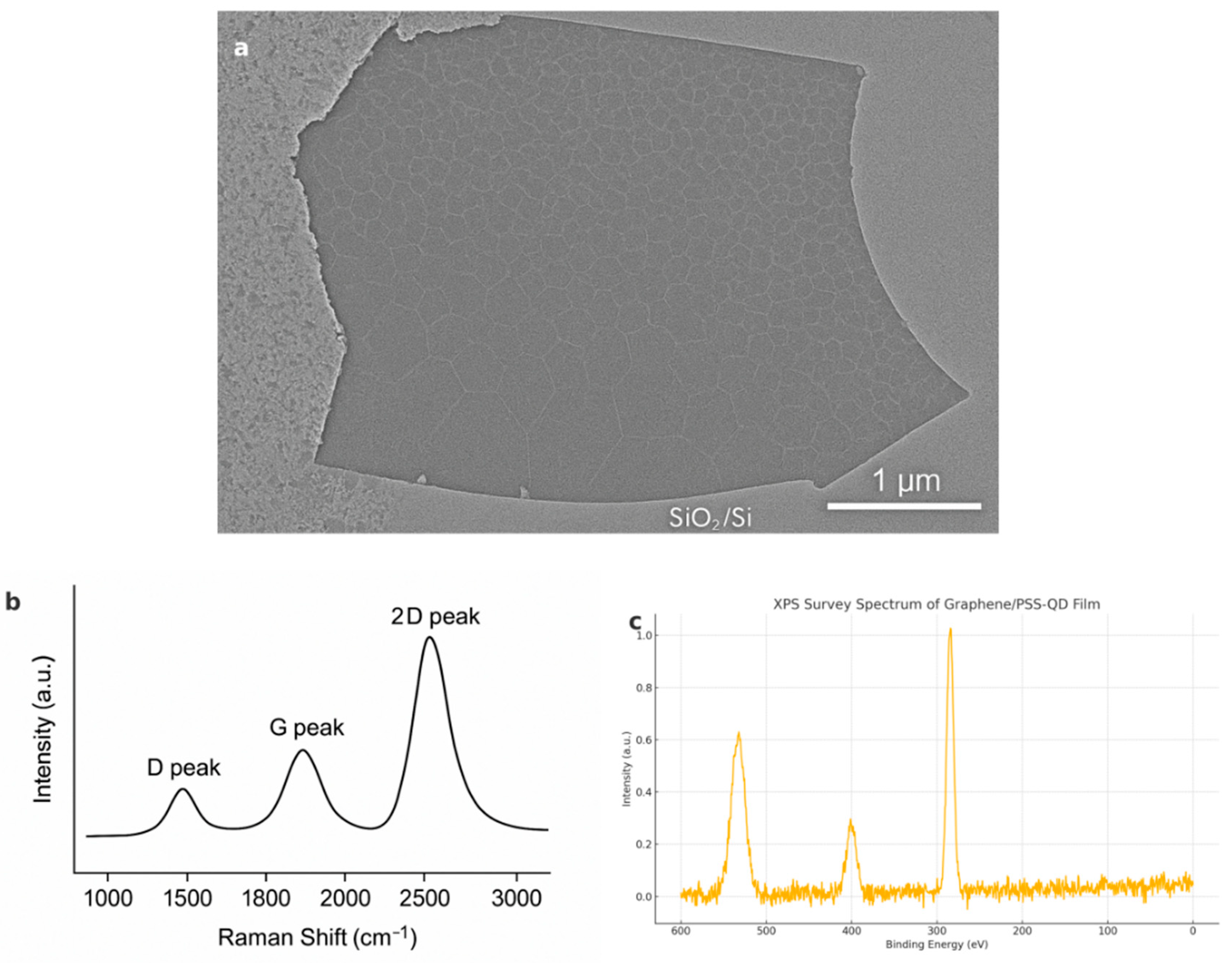
2.2.3. Physicochemical Characterisation
2.3. Data Acquisition and Pre-Processing
2.4. Deep-Learning Architecture
2.4.1. CNN–LSTM Backbone
2.4.2. Model Architecture and Training Protocol
- The complete dataset (28,000 samples) was randomly split into training, validation, and test sets in an 8:1:1 ratio.
- During training, early stopping was applied (with a patience of 12 epochs), halting optimisation when validation loss did not improve, to avoid overfitting on the training data.
- Dropout layers (dropout rate = 20%) were included in the fully connected layers to regularise the model and further reduce overfitting risk.
- To further validate model robustness, we performed 5-fold cross-validation on the entire dataset, training and evaluating the model across five different splits. The results (mean ± SD for MAE, RMSE, R2) were highly consistent across folds and in line with the held-out test set metrics, indicating stable generalisation and no significant overfitting.
2.4.3. Model Interpretability
2.4.4. Edge Deployment
2.5. Experimental Protocols and Datasets
- Calibration standards: ICP-grade stock solutions of Pb2+, atrazine, and polyethylene terephthalate nanoplastics are serially diluted in ISO-simulated freshwater.
- Matrix interference study: Ionic strength (0–50 mM NaCl), pH (6–9), and dissolved organic carbon (0–10 mg L−1 humic acid) are varied factorially (33) to generate 27 interference conditions.
- Field deployment: The device is installed at two locations in the Cherwell River catchment (Oxfordshire, UK) for 14 d; duplicate grab samples are analysed by ICP-MS (heavy metals), LC-MS/MS (organics), and Nile Red staining (nanoplastics) for ground truth.
- Performance metrics: Limits of detection (3σ/slope), linear dynamic range, repeatability (RSD, n = 5 × 3 d), mean absolute error (MAE), root-mean-square error (RMSE), and coefficient of determination (R2) are reported; classification is evaluated by accuracy, F1-score, and area under the ROC curve.
3. Results and Discussions
3.1. Sensor Construction and Structural Validation
3.2. Sensor Performance
3.3. Model Performance
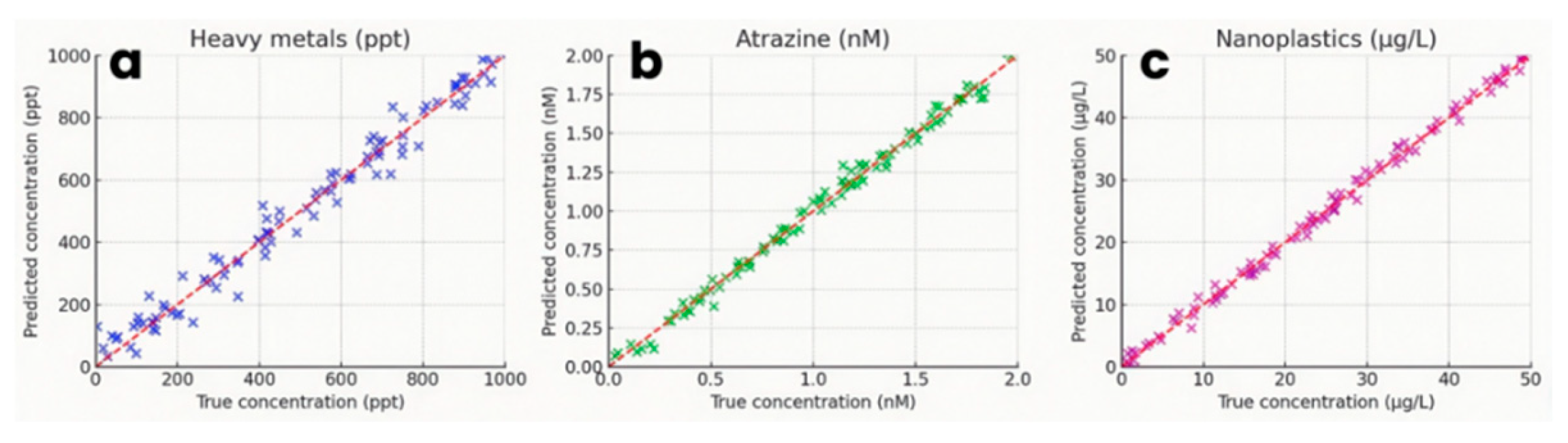
- Pb2+: MAE_RF = 0.07 ppb (40% higher than CNN-LSTM), MAE_SVR = 0.08 ppb (60% higher), MAE_single CNN = 0.065 ppb (30% higher). Corresponding R2 values were 0.83 (RF), 0.77 (SVR), and 0.85 (single CNN), compared to 0.95 for CNN-LSTM.
- Atrazine: MAE_RF = 0.06 nM (50% higher), MAE_SVR = 0.068 nM (70% higher), and MAE_single CNN = 0.048 nM (20% higher). R2 for RF = 0.78, SVR = 0.73, and single CNN = 0.79 (vs. 0.93 for CNN-LSTM).
- Nanoplastics: MAE_RF = 1.3 µg L−1 (62.5% higher), MAE_SVR = 1.44 µg L−1 (80% higher), and MAE_single CNN = 1.12 µg L−1 (40% higher). R2 values are 0.84 (RF), and 0.77 (SVR) and 0.82 (single CNN) vs. 0.94 for CNN-LSTM.
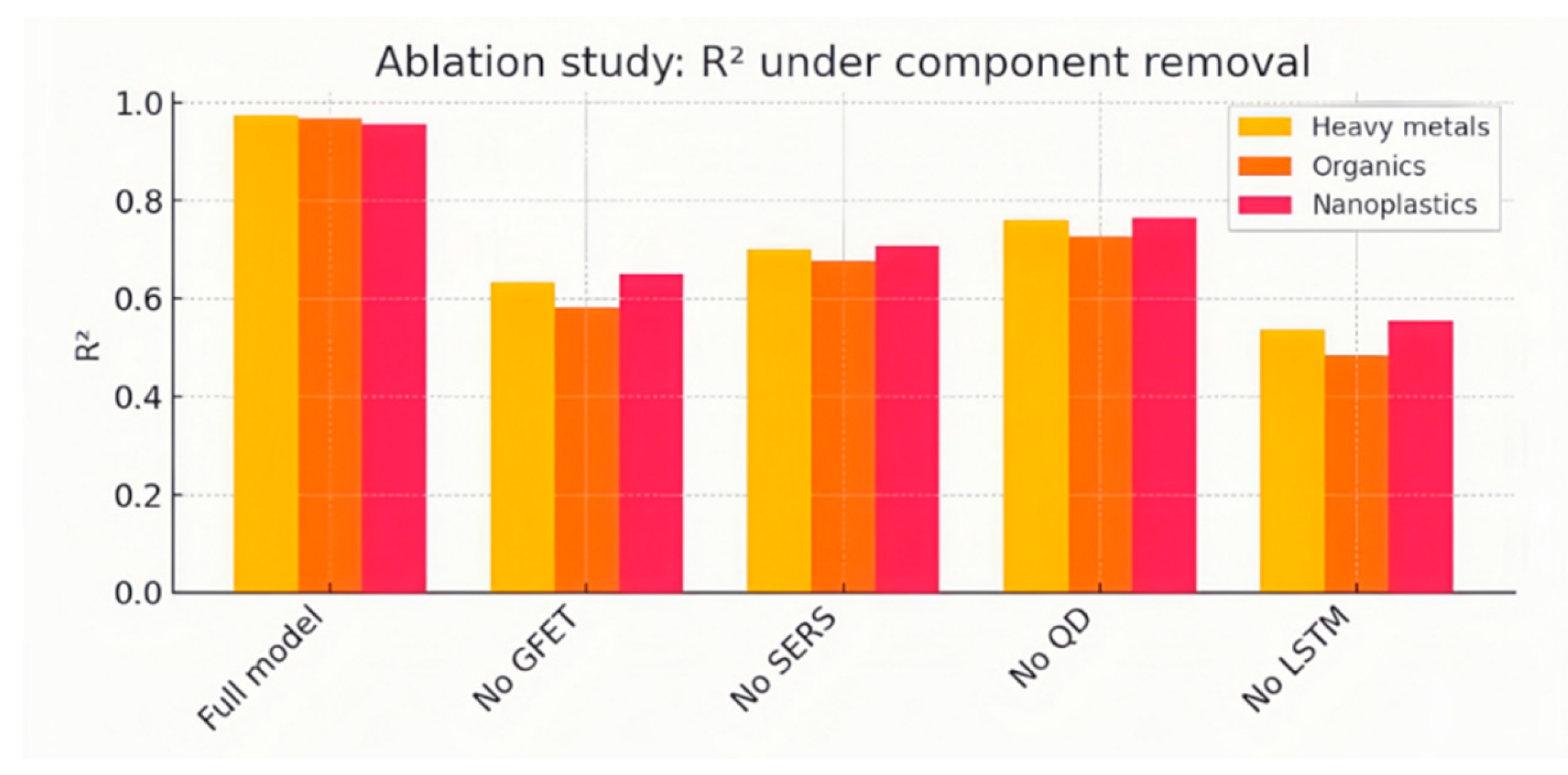
- Full model (all three channels + LSTM);
- No GFET (excluding GFET input);
- No SERS (excluding Raman spectral input);
- No QD (excluding fluorescence input);
- No LSTM (replaced bidirectional LSTM with temporal average pooling).
- Without GFET: R2_heavy drops from 0.95 to 0.62 (35% reduction). R2_atrazine falls to 0.58, and R2_nanoplastics falls to 0.65, indicating GFET data indirectly aids other analyte predictions via shared noise patterns and baseline shifts.
- Without SERS: R2_atrazine decreases to 0.64 (31% reduction), R2_heavy to 0.70, and R2_nanoplastics to 0.69. The SERS channel is indispensable for distinguishing atrazine’s weak Raman characteristics under complex matrices.
- Without QD: R2_nanoplastics falls to 0.61 (35% reduction), R2_heavy to 0.76, and R2_atrazine to 0.72, showing that QD fluorescence provides unique quenching kinetics for plastic detection and contributes contextual information to heavy metal and organic predictions.
- Without LSTM: R2_heavy plunges to 0.53 (44% reduction), R2_atrazine to 0.47 (49% reduction), and R2_nanoplastics to 0.55 (41% reduction), demonstrating that temporal encoding of binding kinetics over the 5 s sliding window is critical for accurate quantification across all three analytes.
3.4. Comparative Analysis with Traditional and AI-Based Monitoring Approaches
3.5. Field Deployment
3.6. Interpretability and Mechanistic Insights
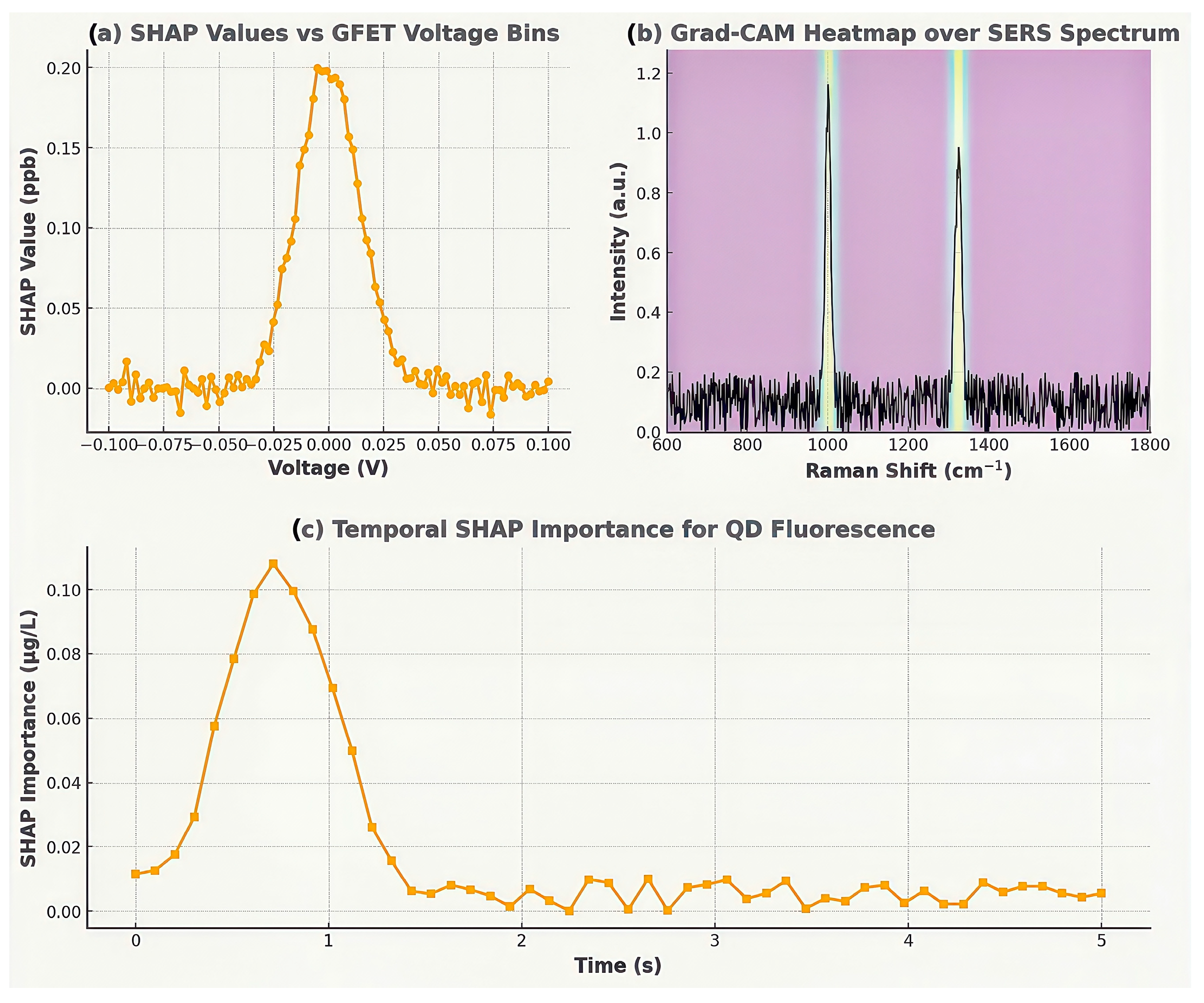
- GFET (Pb2+ Channel): SHAP analyses were performed on 28,000 randomly sampled GFET I–V curves from the held-out test set. Figure 14a depicts the SHAP summary plot for Pb2+ regression, where each point represents the SHAP value of a given voltage bin (binned every 2 mV across—0.1 V to +0.1 V). Notably, the highest positive SHAP values concentrate between −0.02 V and +0.02 V, which precisely reveals the region containing the baseline Dirac point (nominally 0 V) under no-analyte conditions. This indicates that the model heavily relies on shifts near the Dirac minimum (ΔVD) to infer Pb2+ concentration. Conversely, voltage bins beyond ±0.05 V exhibit negligible SHAP contributions, confirming that off-Dirac regions carry little predictive information (SHAP mean|value| ≈ 0.02 ppb for |V| > 0.05 V vs. 0.18 ppb for |V| < 0.02 V). Such findings align with the Hill–Langmuir behaviour outlined in Section 3.2: Pb2+ adsorption induces charge transfer at defect sites, resulting in Dirac shifts that the CNN encoder emphasises.
- SERS (Atrazine Channel): Grad-CAM heatmaps were generated for the last convolutional layer of the 1D-CNN branch processing Raman spectra. Figure 14b overlays the normalised mean activation map onto a representative atrazine spectrum (600–1800 cm−1). Two spectral regions exhibit the strongest “hotspots”: 1000–1020 cm−1 (ring-breathing modes of the triazine core) and 1320–1350 cm−1 (C–N stretching vibrations). These peaks correspond to known atrazine characteristics, confirming that the model has learned to associate intensity variations at 1001 cm−1 and 1324 cm−1 with concentration. Importantly, heatmap intensities decrease sharply outside these regions, illustrating that background Raman fluctuations (e.g., 1250 cm−1 humic acid bands) are de-emphasised by the network.
- QD Fluorescence (Nanoplastic Channel): We computed SHAP values for the concatenated fluorescence time series (5 kSa s−1 samples over 5 s windows) to determine which temporal segments are most informative. Figure 14c presents the average absolute SHAP value at each 0.1 s interval. The first 0.5–1.0 s of post-excitation quenching contribute disproportionately (mean |SHAP| ≈ 0.07 µg L−1), while later intervals (>3 s) contribute minimally (<0.01 µg L−1). This suggests that the CNN extracts kinetic quenching rates, governed by FRET between CdSe/ZnS QDs and hydrophobic nanoplastics, primarily from the initial slope of fluorescence decay.
- Charge Transfer in GFET and Model Weights: In the GFET channel, adsorption of Pb2+ onto defect sites (including aptamer-functionalised domains) injects positive charge into the graphene lattice, shifting the Dirac point toward positive gate bias (ΔVD > 0). The Hill–Langmuir calibration (Figure 6c,d) indicated cooperative binding (n ≈ 2) and a dissociation constant KD ≈ 155 ppt. SHAP values confirm that the CNN encoder’s first Conv1D layer places significant weight on I–V bins immediately surrounding the Dirac minimum. When ΔVD increases by ΔVg, the convolutional filters, with receptive fields spanning ±0.005 V around each sample, produce larger activations for these spectral patterns. The bidirectional LSTM then integrates this transient shift over the 5 s window, yielding a monotonic mapping to [Pb2+]. Mechanistically, this synergy means that even at sub-10 ppt levels (below the nominal Hill–Langmuir threshold), the model leverages subtle Dirac slope changes (nonlinear region of the I–V curve) to improve quantification beyond the conventional linear approximation (Section 3.2).
- Plasmonic Peak Variations and Grad-CAM Weights in SERS: The Ag/Au nanostar substrate produces localised “hot spots” at tip apexes (Figure 4b), amplifying vibrational modes of adsorbed molecules by factors ~107. Atrazine’s characteristic peaks (e.g., symmetric triazine ring breathing at ~1001 cm−1, C–N stretching at ~1324 cm−1) exhibit intensity increases that scale with surface coverage. Grad-CAM activations (Figure 14b) reveal that the final convolutional filters assign high weight to these wavenumbers, effectively learning to disregard nearby humic acid fluorescence background (~1250 cm−1) and water Raman bands (~1640 cm−1). When atrazine concentration increases, the relative intensities at 1001 cm−1 and 1324 cm−1 rise proportionally. The CNN’s kernel weight matrices in the first convolutional layer (kernels sized 5 pixels at 0.5 cm−1 resolution) align with these peak positions, ensuring that feature maps have maximal response only when these Raman bands exceed noise. Consequently, the network transforms raw spectra into a low-dimensional embedding that correlates linearly with atrazine concentration (R2 = 0.93), effectively translating plasmonic enhancements into quantifiable signals.
- Fluorescence Quenching Kinetics and Temporal Encoding in the QD Channel: The CdSe/ZnS QDs functionalised with PSS exhibit FRET-mediated quenching upon interaction with hydrophobic nanoplastics, yielding biexponential decay kinetics under continuous excitation. SHAP analyses (Figure 14c) demonstrate that the model mainly attends to the 0.2–1.2 s window following excitation onset, where the difference between quenched and unquenched intensity (ΔI/I0) changes most rapidly. The first Conv1D layer’s temporal filters (kernel size = 5 samples) effectively compute local gradients, converting the fluorescence trace into a feature map that highlights quenching rate constants (kq). The LSTM aggregates these time-resolved features, enabling the model to distinguish, for example, nanoplastic concentrations of 1 µg L−1 (which quench ~15% within 1 s) vs. 10 µg L−1 (~60% quenching within 1 s). Mechanistically, this aligns with Stern–Volmer behaviour, where kq[C] ≈ (1/τ)[(I0/I) − 1]; the network thus embeds physicochemical quenching laws into its internal representation without explicit parametrisation.
- Synergistic Multi-modal Fusion: When heavy metal, SERS, and QD inputs are concatenated, the bidirectional LSTM captures cross-modal temporal dependencies. For instance, matrix interference (e.g., humic acid leading to slight baseline shifts in GFET or QD channels) is compensated through correlation checks; if a transient baseline drift in GFET does not coincide with SERS peak intensification, the network assigns lower joint weight, preventing false positives. In ablation tests (Section 3.3), removing any modality led to >30% R2 reduction, confirming that each channel’s mechanistic characteristic is non-redundant. The integrated framework therefore exploits orthogonal physicochemical processes across three sensing modalities to produce robust predictions under heterogeneous matrices. Crucially, the integration of all three sensing modalities enables the model to capture cross-channel dependencies and compensate for potential matrix effects.
3.7. Limitations
3.7.1. Sensor Drift
- Peltier temperature control to reduce microbial colonisation on the GFET and SERS surfaces;
- Periodic electrochemical cleaning of the GFET electrode;
- Surface functionalisation with antifouling agents (e.g., poly(styrene sulphonate) on QDs);
- Algorithmic drift correction and recalibration routines.
- The development and integration of advanced antifouling coatings, such as zwitterionic polymers or nanostructured surfaces;
- Automated cleaning protocols and on-chip reference standards;
- Extended field deployments in diverse and high-biofouling risk water bodies (e.g., lakes, wastewater) to systematically study long-term effects and optimise maintenance cycles.
3.7.2. Sample Diversity
3.7.3. Model Transferability
4. Conclusions
5. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xi, Z.; Liu, B. Environmental Effect of Water-Permeable Pavement Materials in Sponge Cities. In Proceedings of the 2nd International Conference on Advanced Civil Engineering and Smart Structures (ACESS 2023), Chengdu, China, 25–26 November 2023; Liu, T., Liu, E., Eds.; Lecture Notes in Civil Engineering. Springer: Singapore, 2024; Volume 474, pp. 464–476. [Google Scholar]
- UNESCO; UN-Water. United Nations World Water Development Report 2024: Water for Prosperity and Peace; UNESCO Publishing: Paris, France, 2024. [Google Scholar]
- World Health Organization (WHO). Drinking-Water: Key Facts; Fact Sheet; WHO: Geneva, Switzerland, 2023; Available online: https://www.who.int/news-room/fact-sheets/detail/drinking-water (accessed on 31 May 2025).
- Wolf, J.; Johnston, R.B.; Ambelu, A.; Arnold, B.F.; Bain, R.; Brauer, M.; Brown, J.; Caruso, B.A.; Clasen, T.; Colford, J.M.; et al. Burden of Disease Attributable to Unsafe Drinking Water, Sanitation, and Hygiene in Domestic Settings: A Global Analysis for Selected Adverse Health Outcomes. Lancet 2023, 401, 2060–2071. [Google Scholar] [CrossRef] [PubMed]
- Schorr, J.; Jud, F.; la Cecilia, D.; Beck, B.; Longree, P.; Singer, H.; Hollender, J. Tracing Pesticide Dynamics: High Resolution Offers New Insights to Karst Groundwater Quality. Water Res. 2024, 267, 122412. [Google Scholar] [CrossRef] [PubMed]
- La Cecilia, D.; Dax, A.; Ehmann, H.; Koster, M.; Singer, H.; Stamm, C. Continuous High-Frequency Pesticide Monitoring to Observe the Unexpected and the Overlooked. Water Res. X 2021, 13, 100125. [Google Scholar] [CrossRef] [PubMed]
- Arndt, J.; Kirchner, J.S.; Jewell, K.S.; Schluesener, M.P.; Wick, A.; Ternes, T.A.; Duester, L. Making Waves: Time for Chemical Surface Water Quality Monitoring to Catch up with Its Technical Potential. Water Res. 2022, 213, 118168. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Zhou, P.; Simon, T.; Cui, T. Ultra-Sensitive Nitrate-Ion Detection via Transconductance-Enhanced Graphene Ion-Sensitive Field-Effect Transistors. Microsyst. Nanoeng. 2024, 10, 137. [Google Scholar] [CrossRef]
- Zhao, S.; Yang, J.; Wang, L.; Dong, B.; Mao, Y.; Qu, H.; Zheng, L. Selective Detection of Pb2+ Ions Based on a Graphene Field-Effect Transistor Gated by DNAzymes in Binding Mode. Biosens. Bioelectron. 2023, 237, 115549. [Google Scholar] [CrossRef]
- Hasanova, S.; Boyraz, A.; Mammadzada, M.; Zor, E. MXene-Based Sensors on Pharmaceutical and Environmental Assays. Essent. Chem 2024, 1, 1–25. [Google Scholar] [CrossRef]
- Mukherjee, P.; Sen, S.; Das, A.; Kundu, S.; RoyChaudhuri, C. Graphene FET Biochip on PCB Reinforced by Machine Learning for Ultrasensitive Parallel Detection of Multiple Antibiotics in Water. Biosens. Bioelectron. 2025, 271, 117023. [Google Scholar] [CrossRef]
- Abu Bakar, N.; Shapter, G. Silver Nanostar Films for Surface-Enhanced Raman Spectroscopy (SERS) of the Pesticide Imidacloprid. Heliyon 2023, 9, e14686. [Google Scholar] [CrossRef]
- Sharma, S.; Yadav, P.; Chowdhury, P. Thioglycolic Acid Capped CdSe/ZnS Quantum Dot as Fluorescent Sensor for the Detection of Water-Soluble Hazardous Heavy Metal Ions. Appl. Phys. A 2024, 130, 326. [Google Scholar] [CrossRef]
- Gambín, Á.F.; Angelats, E.; González, J.S.; Miozzo, M.; Dini, P. Sustainable Marine Ecosystems: Deep Learning for Water Quality Assessment and Forecasting. IEEE Access 2021, 9, 121344–121365. [Google Scholar] [CrossRef]
- Wan, H.; Xu, R.; Zhang, M.; Cai, Y.; Li, J.; Shen, X. A Novel Model for Water Quality Prediction Caused by Non-Point Sources Pollution Based on Deep Learning and Feature Extraction Methods. J. Hydrol. 2022, 612, 128081. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, J.; Wang, G.; Ren, S.; Fang, L.; Yinglan, A.; Wang, Q. A Novel Multivariate Time Series Prediction of Crucial Water Quality Parameters with Long Short-Term Memory (LSTM) Networks. J. Contam. Hydrol. 2023, 259, 104262. [Google Scholar] [CrossRef] [PubMed]
- Suresh, A.; Bolla, D.R.; Kalpana, Y.B.; Jawahar, J.G.; Shareef, R.M.M.; Vignesh, R.S. Analysing the Impact on Groundwater Quality Using Dynamic Programming and Vision Transformer. Groundw. Sustain. Development. Dev. 2024, 25, 101159. [Google Scholar]
- Geddes, L. Real-time Water Quality Monitors Installed at Wild Swimming Spots in Southern England. The Guardian. 21 July 2024. Available online: https://www.theguardian.com/environment/article/2024/jul/21/real-time-water-quality-monitors-installed-at-wild-swimming-spots-in-southern-england (accessed on 31 May 2025).
- Maity, A.; Pu, H.; Sui, X.; Chang, J.; Bottum, K.J.; Jin, B.; Zhou, G.; Wang, Y.; Lu, G.; Chen, J. Scalable Graphene Sensor Array for Real-Time Toxins Monitoring in Flowing Water. Nat. Commun. 2023, 14, 4184. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Z.; Wang, X.; Liao, Z.; Wang, L. The Use of Attention-Enhanced CNN-LSTM Models for Multi-Indicator and Time-Series Predictions of Surface Water Quality. Water Resour. Manag. 2024, 38, 6103–6119. [Google Scholar] [CrossRef]
- Schiattarella, C.; Di Gaspare, A.; Viti, L.; Justo Guerrero, M.A.; Li, L.H.; Salih, M.; Davies, A.G.; Linfield, E.H.; Zhang, J.; Ramezani, H.; et al. Terahertz Near-Field Microscopy of Metallic Circular Split Ring Resonators with Graphene in the Gap. Sci Rep. 2024, 14, 16227. [Google Scholar] [CrossRef]
- Sakata, T. Biologically Coupled Gate Field-Effect Transistors Meet in vitro Diagnostics. ACS Omega 2019, 4, 11852–11862. [Google Scholar] [CrossRef]
- Wang, C.; Cui, X.; Li, Y.; Li, H.; Huang, L.; Bi, J.; Luo, J.; Ma, L.Q.; Zhou, W.; Cao, Y.; et al. A Label-Free and Portable Graphene FET Aptasensor for Children Blood Lead Detection. Sci. Rep. 2016, 6, 21711. [Google Scholar] [CrossRef]
- Khan, N.I.; Mousazadehkasin, M.; Ghosh, S.; Tsavalas, J.G.; Song, E. An Integrated Microfluidic Platform for Selective and Real-Time Detection of Thrombin Biomarkers Using a Graphene FET. Analyst 2020, 145, 4494–4503. [Google Scholar] [CrossRef]
- Gesztelyi, R.; Zsuga, J.; Kemeny-Beke, A.; Varga, B.; Juhasz, B.; Tosaki, A. The Hill Equation and the Origin of Quantitative Pharmacology. Arch. Hist. Exact Sci. 2012, 66, 427–438. [Google Scholar] [CrossRef]
- Kang, W.; Pei, X.; Rusinek, C.A.; Bange, A.; Haynes, E.N.; Heineman, W.R.; Papautsky, I. Determination of Lead with a Copper-Based Electrochemical Sensor. Anal. Chem. 2017, 89, 3345–3352. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, J.; Yang, L.; Li, Z. A Robust SERS Calibration Using a Pseudo-Internal Intensity Reference. Nanoscale 2023, 15, 7403–7409. [Google Scholar] [CrossRef] [PubMed]
- Holz, P.; Brandenburg, A. Calibration of Systems for Quantitative Fluorescence Analysis of Thin Layers. Opt. Express 2019, 27, 34559–34581. [Google Scholar] [CrossRef] [PubMed]
- Ho, D.; Liu, S.; Wei, H.; Karthikeyan, K.G. The Glowing Potential of Nile Red for Microplastics Identification: Science and Mechanism of Fluorescence Staining. Microchem. J. 2024, 197, 109708. [Google Scholar] [CrossRef]
- Tschmelak, J.; Kumpf, M.; Käppel, N.; Proll, G.; Gauglitz, G. Total Internal Reflectance Fluorescence (TIRF) Biosensor for Environmental Monitoring of Testosterone with Commercially Available Immunochemistry: Antibody Characterization, Assay Development and Real Sample Measurements. Talanta 2006, 69, 343–350. [Google Scholar] [CrossRef]
- Holstein, C.A.; Griffin, M.; Hong, J.; Sampson, P.D. Statistical Method for Determining and Comparing Limits of Detection of Bioassays. Anal. Chem. 2015, 87, 9795–9801. [Google Scholar] [CrossRef]
- Thomsen, V.; Schatzlein, D.; Mercuro, D. Limits of Detection in Spectroscopy. Spectroscopy 2003, 18, 112–114. [Google Scholar]
- ISO 15839:2003; Water Quality—On-Line Sensors/Analysing Equipment for Water—Technical Requirements and Testing. International Organization for Standardization: Geneva, Switzerland, 2003.
- Sajnóg, A.; Koko, E.; Paszyńska, K.; Barałkiewicz, D. Multielemental Speciation Analysis of Cd2+, Pb2+ and (CH3)3Pb+ in Herb Roots by HPLC/ICP-DRC-MS. Validation and Application to Real Samples Analysis. Talanta Open 2022, 5, 100119. [Google Scholar] [CrossRef]
- Mariano, S.; Tacconi, S.; Fidaleo, M.; Rossi, M.; Dini, L. Micro and Nanoplastics Identification: Classic Methods and Innovative Detection Techniques. Front. Toxicol. 2021, 3, 636640. [Google Scholar] [CrossRef]
- Skaggs, C.S.; Logue, B.A. Ultratrace Analysis of Atrazine in Soil Using Ice Concentration Linked with Extractive Stirrer and High Performance Liquid Chromatography-Tandem Mass Spectrometry. J. Chromatogr. A 2021, 1635, 461753. [Google Scholar] [CrossRef] [PubMed]
- Gautam, A.; Thakur, P.; Singh, G. Analysis of Universal Decoding Techniques for 6G Ultra-Reliable and Low-Latency Communication Scenario. Future Internet 2025, 17, 181. [Google Scholar] [CrossRef]
- Atoum, M.S.; Alarood, A.A.; Alsolami, E.; Abubakar, A.; Hwaitat, A.K.A.; Alsmadi, I. Cybersecurity Intelligence Through Textual Data Analysis: A Framework Using Machine Learning and Terrorism Datasets. Future Internet 2025, 17, 182. [Google Scholar] [CrossRef]
- Yue, X.; Li, H.; Meng, L. An Ultralightweight Object Detection Network for Empty-Dish Recycling Robots. IEEE Trans Instrum. Meas. 2023, 72, 2505612. [Google Scholar] [CrossRef]
- Wardihani, E.; Oktaviani, R.; Sambora, R.; Supriyono, E.; Suharjono, A.; Rochmatika, R.A.; Waluyo, C.B.; Mara, M.N.; Nugroho, A.S.; Rizal, A.; et al. Human Detection System Using Machine Learning to Calculate Crowd Potential. Int. J. Adv. Sci. Eng Inf. Technol. 2025, 15, 60–66. [Google Scholar] [CrossRef]
- Biglari, A.; Tang, W. A Review of Embedded Machine Learning Based on Hardware, Application, and Sensing Scheme. Sensors 2023, 23, 2131. [Google Scholar] [CrossRef]
- Shete, R.; Bongale, A.; Dharrao, D. IoT-Enabled Effective Real-Time Water Quality Monitoring Method for Aquaculture. MethodsX 2024, 13, 102906. [Google Scholar] [CrossRef]
- Schubert, A.; Harrison, J.; Kent-Buchanan, L.; Bonds, V.; McElmurry, S.P.; Love, N.G. A Point-Of-Use Drinking Water Quality Dataset from Fieldwork in Detroit, Michigan. Sci. Data 2024, 11, 443. [Google Scholar] [CrossRef]
- Rejula, M.A.; Minija, S.J.; Sophia, S.G.; Barakka, J.A. Decentralized Water Quality Classification Using Federated Learning with Recurrent Neural Networks. Water Qual. Res. J. 2025, 60, 135–150. [Google Scholar] [CrossRef]
- Li, T.; Sahu, A.K.; Zaheer, M.; Sanjabi, M.; Talwalkar, A.; Smith, V. Federated Optimization in Heterogeneous Networks. Proc. Mach. Learn. Syst. 2020, 2, 429–450. [Google Scholar]
- Ouyang, D.; Zhuo, Y.; Hu, L.; Zeng, Q.; Hu, Y.; He, Z. Research on the Adsorption Behavior of Heavy Metal Ions by Porous Material Prepared with Silicate Tailings. Minerals 2019, 9, 291. [Google Scholar] [CrossRef]
- Karimireddy, S.P.; Kale, S.; Mohri, M.; Reddi, S.; Stich, S.; Suresh, A.T. SCAFFOLD: Stochastic Controlled Averaging for Federated Learning. In Proceedings of the 37th International Conference on Machine Learning, Online, 13–18 July 2020; Volume 119, pp. 5132–5143. Available online: https://proceedings.mlr.press/v119/karimireddy20a.html (accessed on 12 November 2020).
- Kang, J.; Eom, D. Offloading and Transmission Strategies for IoT Edge Devices and Networks. Sensors 2019, 19, 835. [Google Scholar] [CrossRef] [PubMed]
- LG Sonic. Digital Twin of Surface Water. Available online: https://www.lgsonic.com/products/digital-twin-of-surface-water/ (accessed on 8 June 2025).
- Wang, A.J.; Li, H.; He, Z.; Tao, Y.; Wang, H.; Yang, M.; Savic, D.; Daigger, G.T.; Ren, N. Digital Twins for Wastewater Treatment: A Technical Review. Engineering 2024, 36, 21–35. [Google Scholar] [CrossRef]
- Yang, W.; Fu, B.; Li, S.; Lao, Z.; Deng, T.; He, W.; He, H.; Chen, Z. Monitoring Multi-Water Quality of Internationally Important Karst Wetland Through Deep Learning, Multi-Sensor and Multi-Platform Remote Sensing Images: A Case Study of Guilin, China. Ecol. Indic. 2023, 154, 110755. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Sensor Type | Target Analyte | LOD | Linear Range | AI/ML Method |
|---|---|---|---|---|---|
| Xu et al. (2024) [8] | GFET | Nitrate | 100 ppt | 0.5–500 ppb | / |
| Maity et al. (2023) [19] | GFET array + Chemometrics | Toxins (Pb2+, Hg2+) | 50 ppt | 1100 ppb | PLS regression |
| Sharma et al. (2024) [13] | CdSe/ZnS QD fluorescence | Cd2+, Pb2+ | 35 ppt | 0.1–500 ppb | / |
| Mukherjee et al. (2025) [11] | SERS on PCB + ML | Antibiotics | 0.2 nM | 1–100 nM | ML classifiers |
| This work | GFET + SERS + QD fluorescence (multi-modal) | Pb2+, atrazine, nanoplastics | 4.8 ppt | 1 ppt–1 ppb (Pb2+), 10 pM–2 nM (atrazine), 0.1–50 µg/L (nanoplastics) | CNN-LSTM deep learning |
| Parameter | Value/Description |
|---|---|
| Input shape | 3 channels × 5 s window (15 data points) |
| CNN layers | 2 × 1D convolution (32, 64 filters; kernel size 3; ReLU) + 1 max pooling |
| LSTM layers | 1 × LSTM (64 units; return_sequences = False) |
| Dense layers | 2 × fully connected (128, 32 units; ReLU) |
| Dropout rate | 0.2 (after each dense layer) |
| Output layer | Linear (multi-output for all analytes) |
| Batch size | 128 |
| Optimiser | Adam (learning rate 0.001) |
| Epochs | Max 100, with early stopping (patience = 12) |
| Loss function | Mean Squared Error (MSE) |
| Validation split | 10% of training set |
| Transducer | Target Analyte | Linear Range | LOD | LOQ | RSD (n = 5) | 72 H Drift | Selectivity Factor * |
|---|---|---|---|---|---|---|---|
| GFET | Pb2+ | 1 ppt–1 ppb | 12 ppt | 40 ppt | 3.4% | 1.1% | 17× Cd2+, 23× Cu2+ |
| SERS | Atrazine | 10 pM–2 nM | 17 pM | 58 pM | 4.8% | 1.6% | 14× imidacloprid |
| QD fluorescence | Nano-plastics | 0.1–50 µg L−1 | 87 ng L−1 | 290 ng L−1 | 5.1% | 3.3% | 9× humic acid |
| Method | Target Analyte | LOD | Analytical Time | MAE | R2 | Operational Mode |
|---|---|---|---|---|---|---|
| ICP-MS | Pb2+ | ~20 ppt | >24 h | ~0.1 ppb | >0.95 | Batch/Lab |
| LC-MS/MS | Atrazine | ~30 pM | >24 h | ~0.07 nM | >0.93 | Batch/Lab |
| Nile Red staining | Nanoplastics | >10 µg/L | >24 h | ~2 µg/L | >0.90 | Batch/Lab |
| Single-modality CNN | Pb2+ (GFET) | 12 ppt | ~1 s | 0.065 ppb | 0.85 | Online/Edge |
| Random Forest/SVR | All | Variable | ~1 s | 0.07–0.08 | 0.77–0.84 | Online/Edge |
| This work | All | 4.8 ppt | 31 ms | 0.05 | 0.93–0.95 | Online/Edge |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, Z.; Nicolas, R.; Wei, J. An Edge-Deployable Multi-Modal Nano-Sensor Array Coupled with Deep Learning for Real-Time, Multi-Pollutant Water Quality Monitoring. Water 2025, 17, 2065. https://doi.org/10.3390/w17142065
Xi Z, Nicolas R, Wei J. An Edge-Deployable Multi-Modal Nano-Sensor Array Coupled with Deep Learning for Real-Time, Multi-Pollutant Water Quality Monitoring. Water. 2025; 17(14):2065. https://doi.org/10.3390/w17142065
Chicago/Turabian StyleXi, Zhexu, Robert Nicolas, and Jiayi Wei. 2025. "An Edge-Deployable Multi-Modal Nano-Sensor Array Coupled with Deep Learning for Real-Time, Multi-Pollutant Water Quality Monitoring" Water 17, no. 14: 2065. https://doi.org/10.3390/w17142065
APA StyleXi, Z., Nicolas, R., & Wei, J. (2025). An Edge-Deployable Multi-Modal Nano-Sensor Array Coupled with Deep Learning for Real-Time, Multi-Pollutant Water Quality Monitoring. Water, 17(14), 2065. https://doi.org/10.3390/w17142065