
Numerical Models for Predicting Water Flow Characteristics and Optimising a Subsurface Self-Regulating, Low-Energy, Clay-Based Irrigation (SLECI) System in Sandy Loam Soil

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Overview of Materials and Methodology
2.2. Geometry of SLECI Emitter
2.3. Preliminary Laboratory Experiments
2.3.1. Determining the Hydraulic Conductivity of the SLECI Emitters
2.3.2. Determining the Properties of the Soil Sample Used
2.4. Developing and Evaluating the Simulation Model
2.4.1. Theory of Numerical Subsurface Flow Modelling in COMSOL
2.4.2. Inputs to the Richards Equation Model Builder
2.4.3. Setting the Model’s Boundary Conditions
2.5. Model Simulation Treatments
Soil Moisture Dynamics at the Management Allowed Depletion
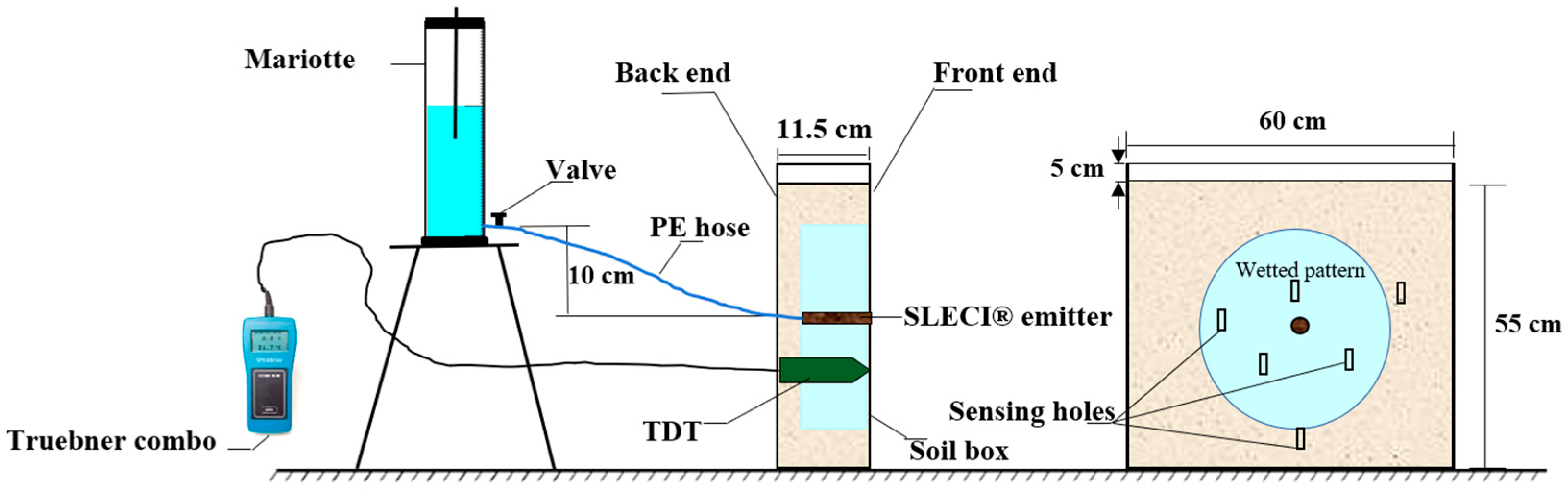
2.6. A Soil Box Laboratory Experiment
Preparation of the Soil Sample for the Soil Box Experiment
2.7. Evaluating the Key Performance Parameters
2.7.1. Emitter Discharge in Soil, Soil Water Content, and Evaporation
2.7.2. Evaluating the Simulated Model
2.7.3. Evaluating the SLECI System’s Key Performance Indices
2.7.4. Interpretation of the Key Performance Indices
2.8. Multi-Objective Optimisation for the SLECI System
2.9. Statistical Analyses
3. Results and Discussions
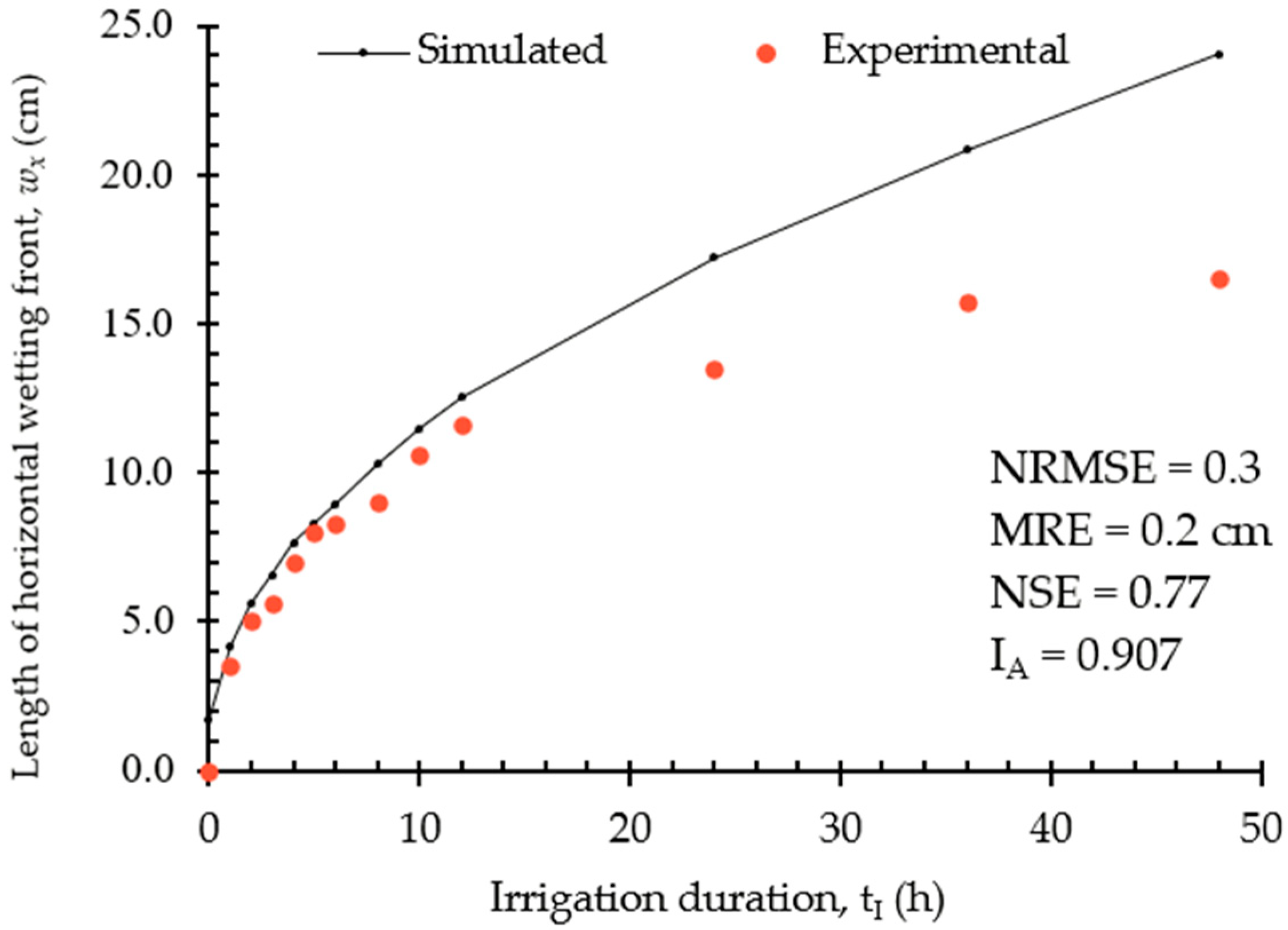
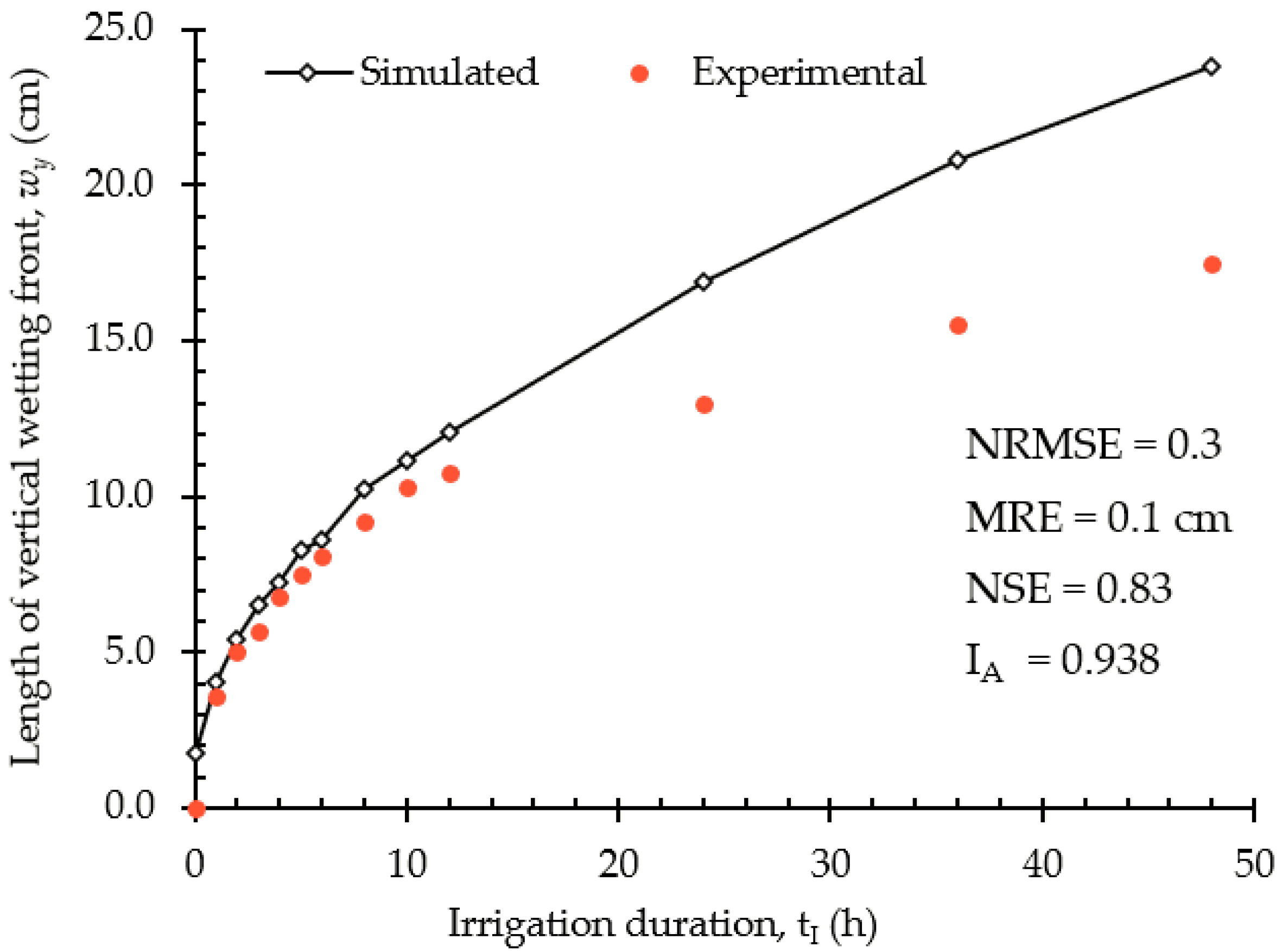
3.1. Validation of the COMSOL-2D Model
3.2. Predicted Variables Versus Different System Operating Parameters
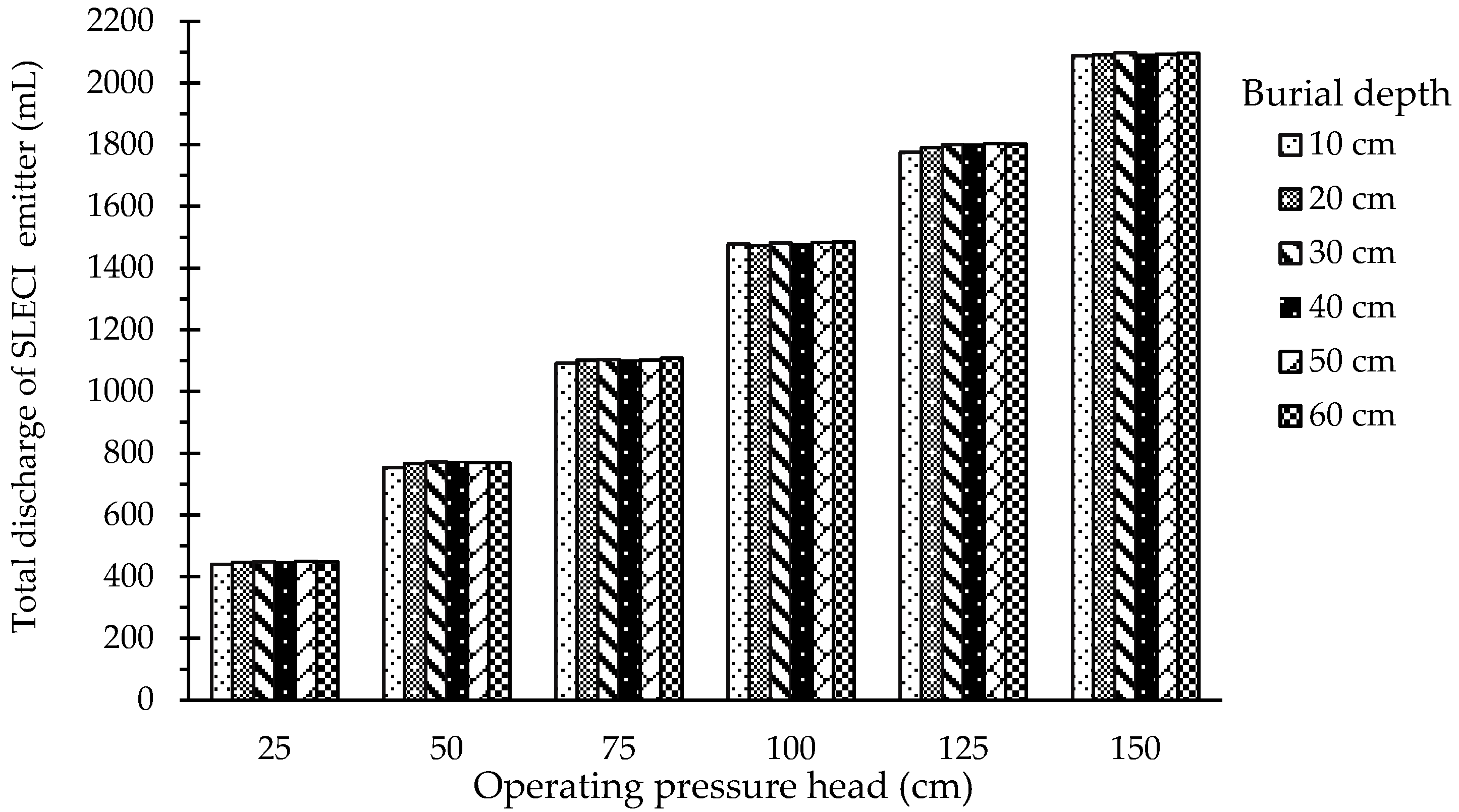
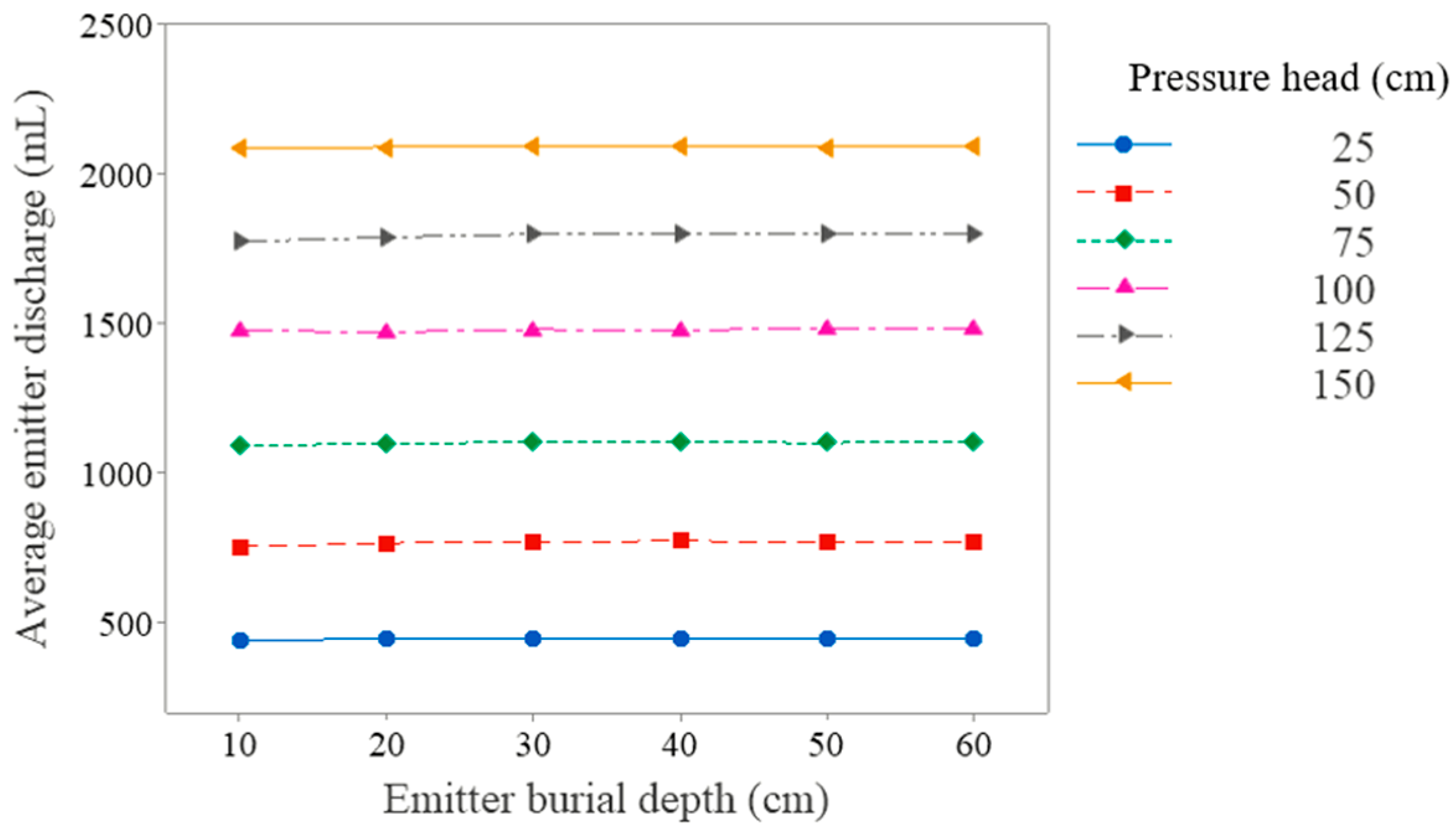
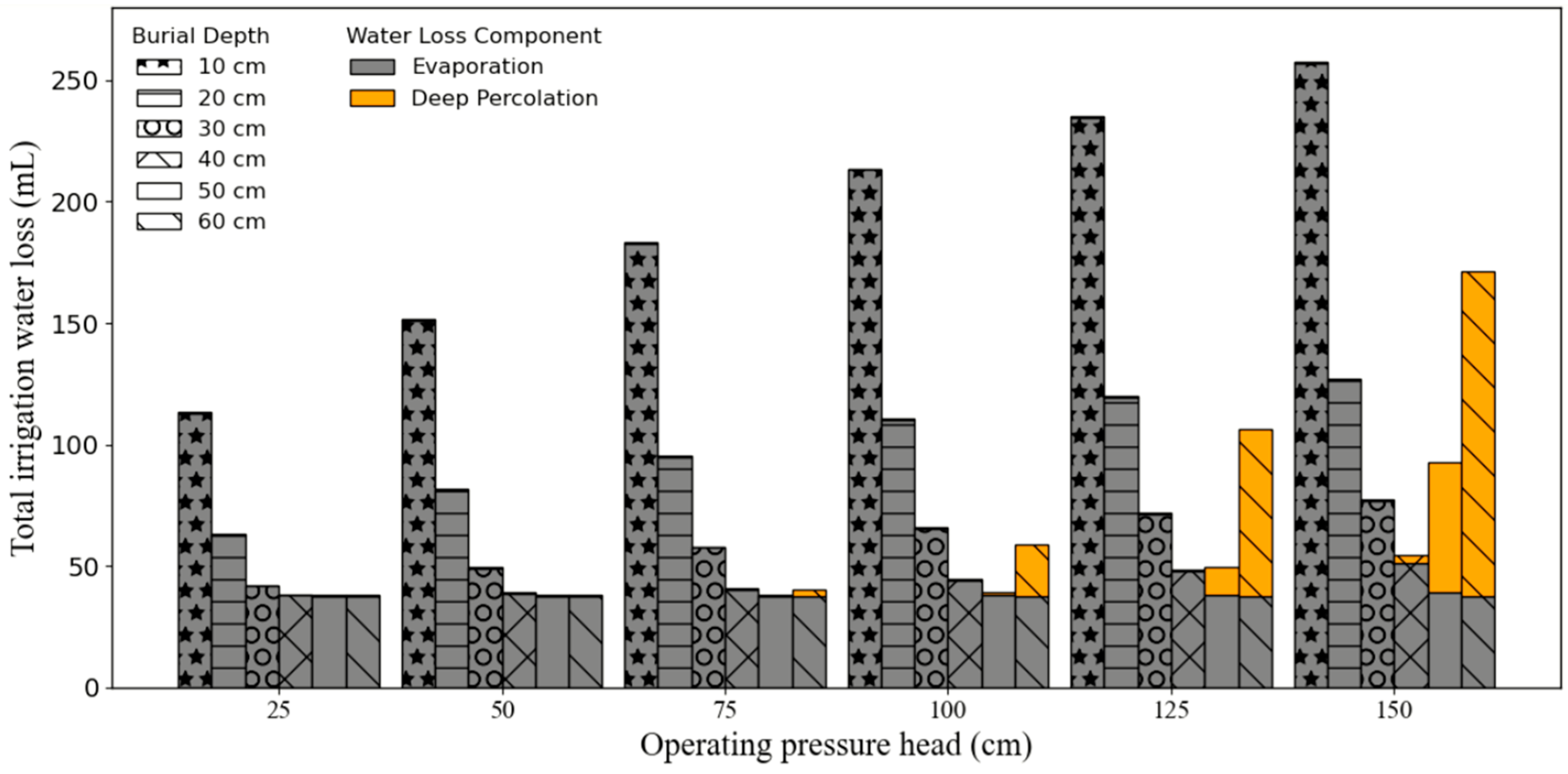
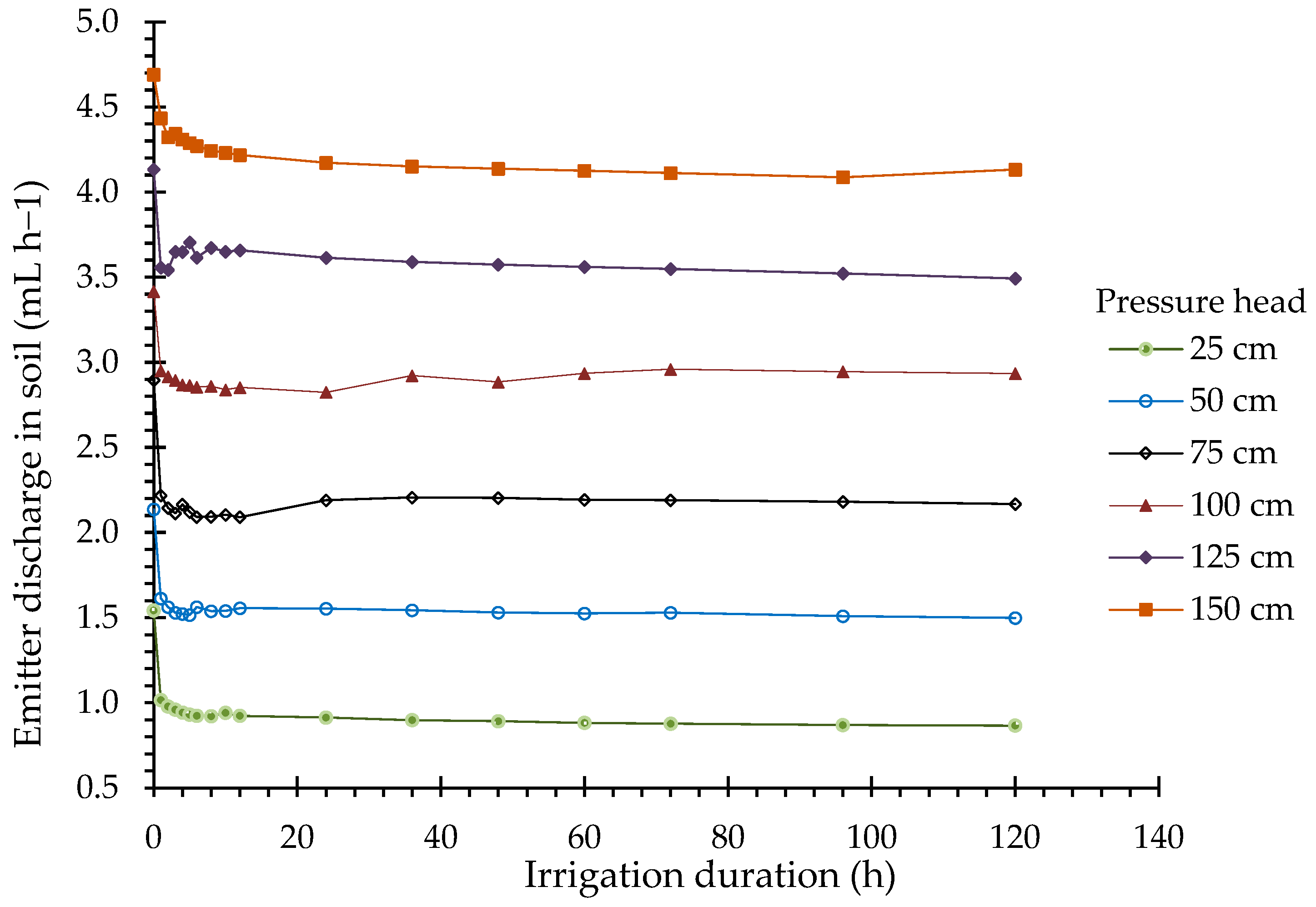
3.2.1. SLECI Emitter Operating Head and Burial Depth
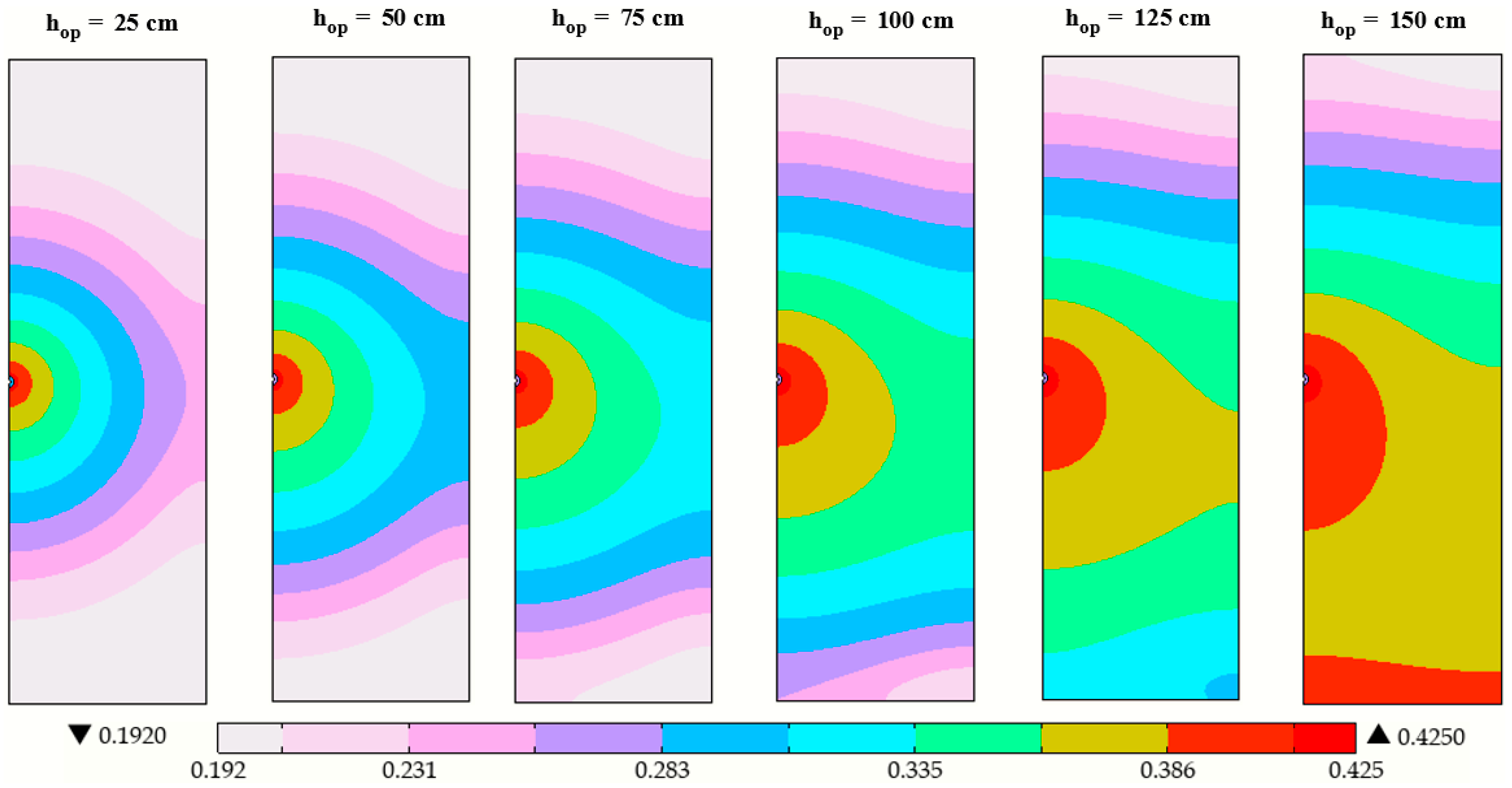
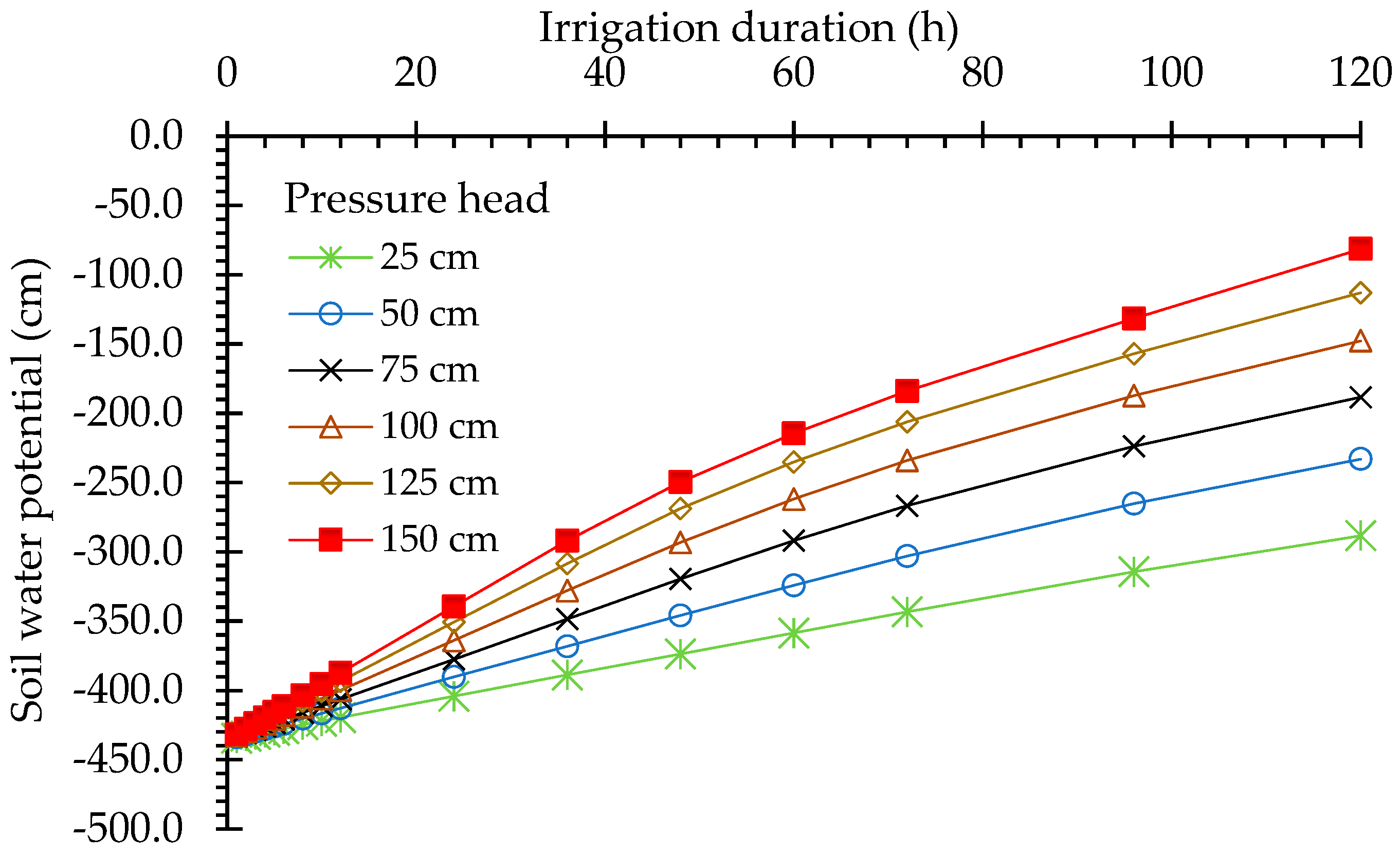
3.2.2. Effect of the Operating Pressure Head on the Advancement of the Water Front
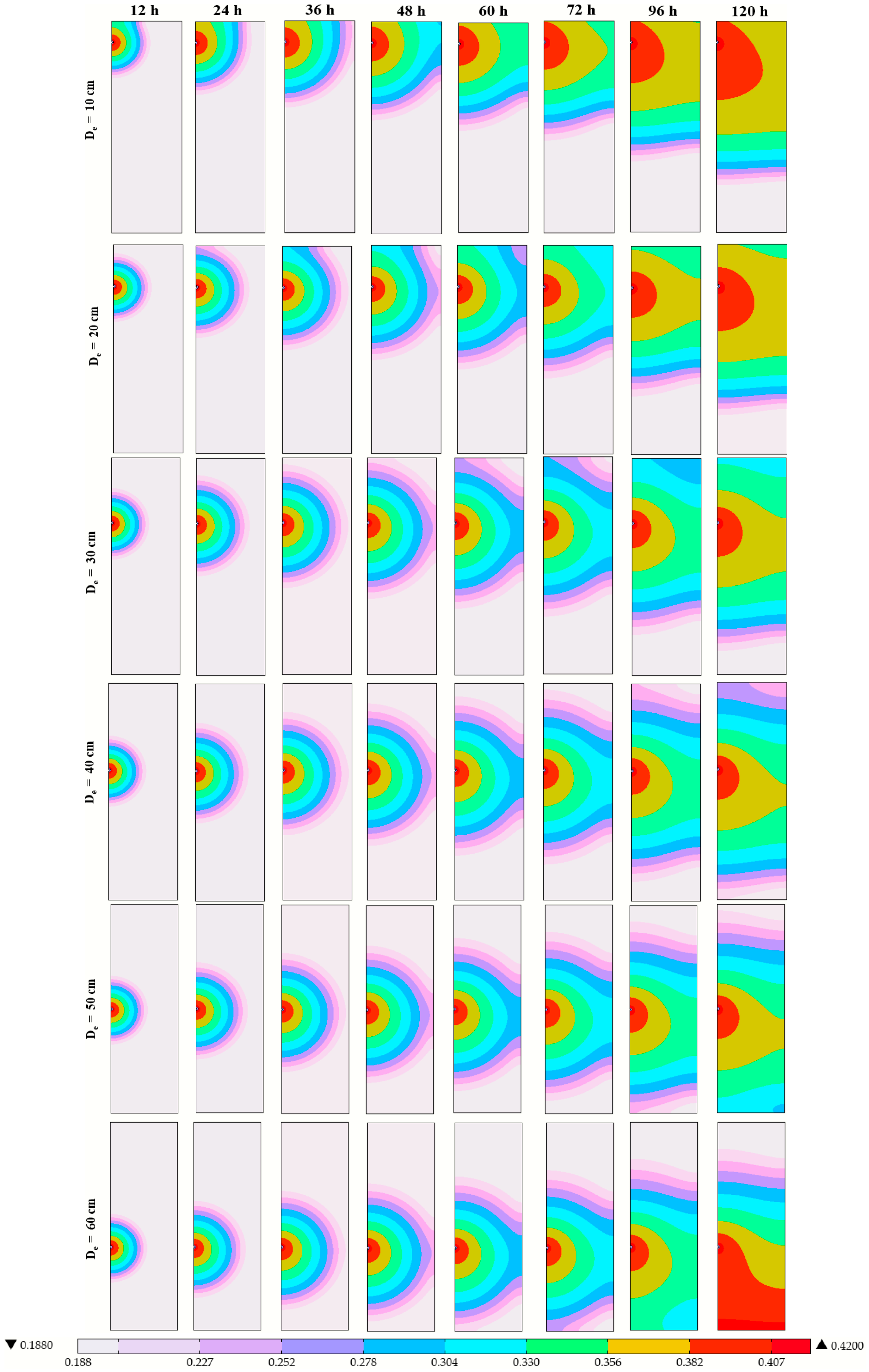
3.2.3. Simulated Wetted Front After 120 h for Emitter Burial Depths
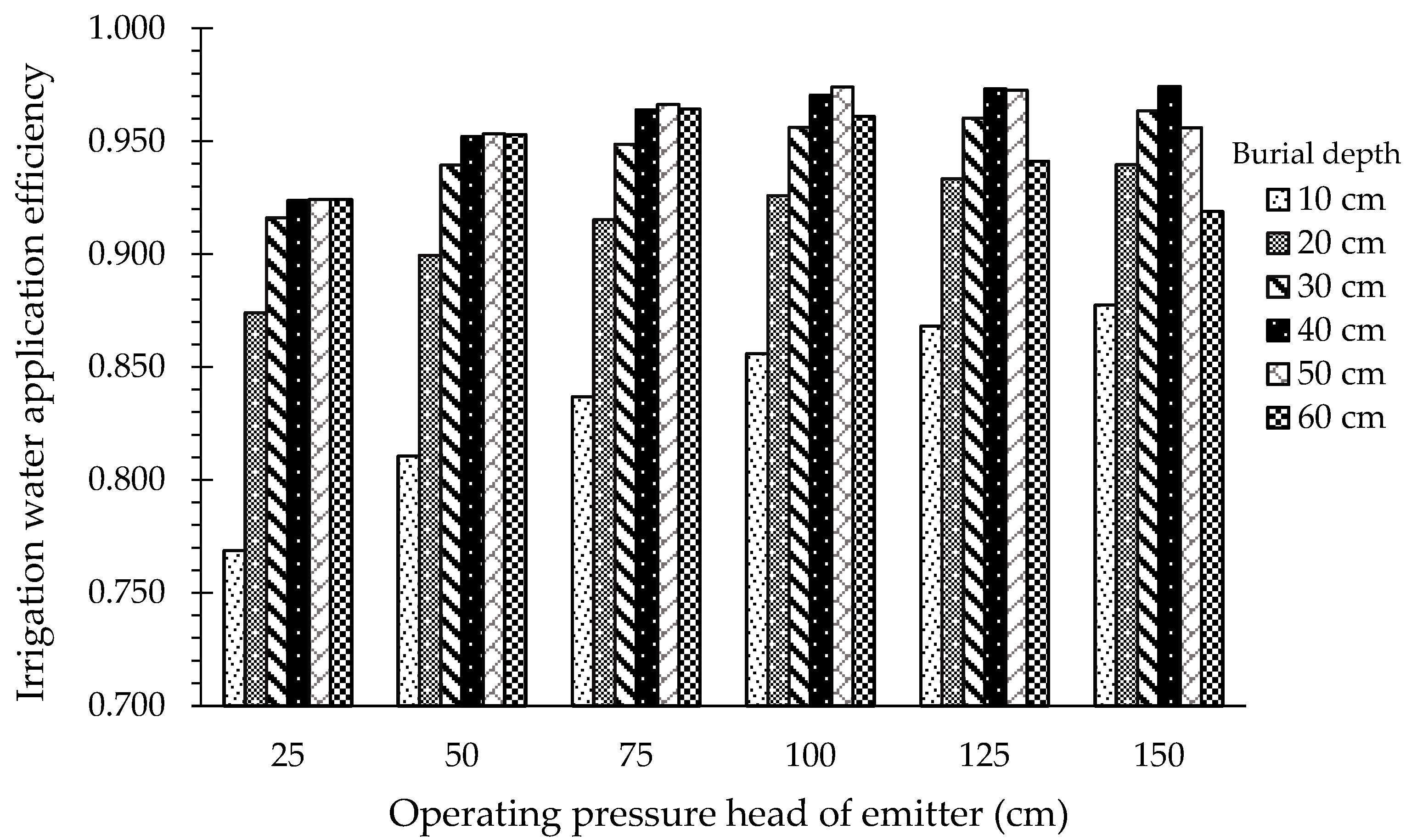
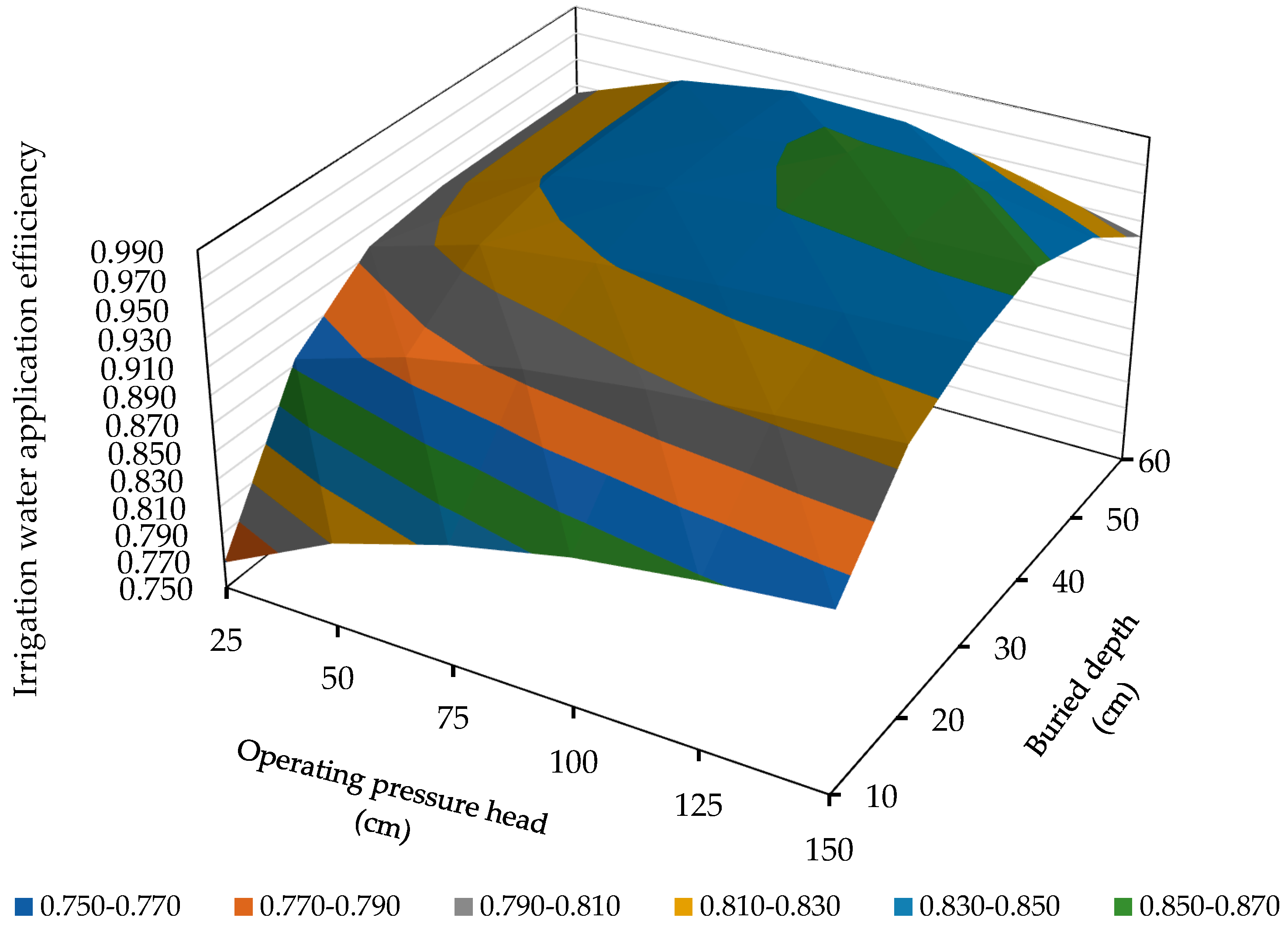
3.2.4. Key Performance Indices of the SLECI System
3.2.5. Soil Water Infiltration Under the Key Design Parameters of SLECI System
3.3. Estimating the Optimal Performance Parameters of the SLECI System
3.3.1. A Predictive Model for the Water Infiltration Characteristics in Sandy Loam Under the SLECI System
3.3.2. Multi-Objective Optimisation
4. Conclusions and Recommendations
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abbas, F.; Al-Naemi, S.; Farooque, A.A.; Phillips, M. A Review on the Water Dimensions, Security, and Governance for Two Distinct Regions. Water 2023, 15, 208. [Google Scholar] [CrossRef]
- Mateo-Sagasta, J.; Zadeh, S.M.; Turral, H.; Burke, J. Water Pollution from Agriculture: A Global Review; The Food and Agricultural Organization: Rome, Italy, 2017; pp. 1–35. [Google Scholar]
- Döll, P.; Schmied, H.M.; Schuh, C.; Portmann, F.T.; Eicker, A. Global-scale assessment of groundwater depletion and related groundwater abstractions: Combining hydrological modeling with information from well observations and GRACE satellites. Water Resour. Res. 2014, 50, 5698–5720. [Google Scholar] [CrossRef]
- Siebert, S.; Burke, J.; Faures, J.M.; Frenken, K.; Hoogeveen, J.; Döll, P.; Portmann, F.T. Groundwater use for irrigation—A global inventory. Hydrol. Earth Syst. Sci. 2010, 14, 1863–1880. [Google Scholar] [CrossRef]
- FAO. Food and Agriculture Organization Corporate Statistical Database. Available online: https://www.fao.org/aquastat/en/databases/maindatabase (accessed on 13 August 2023).
- FAO. Water for Sustainable Food and Agriculture: A Report Produced for the G20 Presidency of Germany. Rome. Available online: https://www.fao.org/3/i7959e/i7959e.pdf (accessed on 20 March 2025).
- Ghazouani, H.; Autovino, D.; Rallo, G.; Douh, B.; Provenzano, G. Using HYDRUS-2D model to assess the optimal drip lateral depth for Eggplant crop in a sandy loam soil of central Tunisia. Ital. J. Agrometeorol. 2016, 1, 47–58. [Google Scholar]
- Zhang, H.; Wang, D.; Ayars, J.E.; Phene, C.J. Biophysical response of young pomegranate trees to surface and sub-surface drip irrigation and deficit irrigation. Irrig. Sci. 2017, 35, 425–435. [Google Scholar] [CrossRef]
- Martínez-Gimeno, M.A.; Bonet, L.; Provenzano, G.; Badal, E.; Intrigliolo, D.S.; Ballester, C. Assessment of yield and water productivity of clementine trees under surface and subsurface drip irrigation. Agric. Water Manag. 2018, 206, 209–216. [Google Scholar] [CrossRef]
- Consoli, S.; Stagno, F.; Roccuzzo, G.; Cirelli, G.L.; Intrigliolo, F. Sustainable management of limited water resources in a young orange orchard. Agric. Water Manag. 2014, 132, 60–68. [Google Scholar] [CrossRef]
- Robles, J.M.; Botía, P.; Pérez-Pérez, J.G. Subsurface drip irrigation affects trunk diameter fluctuations in lemon trees, in comparison with surface drip irrigation. Agric. Water Manag. 2016, 165, 11–21. [Google Scholar] [CrossRef]
- Dirwai, T.L.; Mabhaudhi, T.; Kanda, E.K.; Senzanje, A. Moistube irrigation technology development, adoption and future prospects: A systematic scoping review. Heliyon 2021, 7, e06213. [Google Scholar] [CrossRef]
- Sechube, M.P.; Chaba, H.A.; Plooy, C.P.D.; Truter, M.; Araya, H. Evaluating the economic cost of the self-regulating, low energy, clay-based irrigation system as a climate-smart agricultural innovation for smallholder farmers, South Africa. In Evidence-Based Case Studies in South Africa; Department of Agriculture, Land Reform and Rural Development (DALRRD): Arcadia, South Africa, 2022; p. 209. [Google Scholar]
- Kanda, E.K.; Senzanje, A.; Mabhaudhi, T. Soil water dynamics under Moistube irrigation. Phys. Chem. Earth 2020, 115, 102836. [Google Scholar] [CrossRef]
- Pereira, D.; Leitao, J.C.C.; Gaspar, P.D.; Fael, C.; Falorca, I.; Khairy, W.; Wahid, N.; El Yousfi, H.; Bouazzama, B.; Siering, J.; et al. Exploring Irrigation and Water Supply Technologies for Smallholder Farmers in the Mediterranean Region. Sustainability 2023, 15, 6875. [Google Scholar] [CrossRef]
- Fan, Y.; Ma, L.; Wei, H.; Zhu, P. Numerical investigation of wetting front migration and soil water distribution under vertical line source irrigation with different influencing factors. Water Sci. Technol. Water Supply 2021, 21, 2233–2248. [Google Scholar] [CrossRef]
- Qiao, W.; Luo, Z.; Lin, D.; Zhang, Z.; Wang, S. An Empirical Model for Aeolian Sandy Soil Wetting Front Estimation with Subsurface Drip Irrigation. Water 2023, 15, 1336. [Google Scholar] [CrossRef]
- Cristóbal-Muñoz, I.; Prado-Hernández, J.V.; Martínez-Ruiz, A.; Pascual-Ramírez, F.; Cristóbal-Acevedo, D.; Cristóbal-Muñoz, D. An Improved Empirical Model for Estimating the Geometry of the Soil Wetting Front with Surface Drip Irrigation. Water 2022, 14, 1827. [Google Scholar] [CrossRef]
- Qin, X.; Duan, X.; Su, L.; Shen, X.; Hu, G. Numerical Simulation of Soil Water Movement under Subsurface Irrigation. Math. Probl. Eng. 2014, 2014, 126398. [Google Scholar] [CrossRef]
- Al-Ogaidi, A.A.M.; Wayayok, A.; Rowshon, M.K.; Abdullah, A.F. Wetting patterns estimation under drip irrigation systems using an enhanced empirical model. Agric. Water Manag. 2016, 176, 203–213. [Google Scholar] [CrossRef]
- Douh, B.; Didouni, O.; Mguidiche, A.; Ghazouani, H.; Khila, S.; Belaid, A.; Boujelben, A. Wetting patterns estimation under subsurface drip irrigation systems for different discharge rates and soil types. In Advances in Science, Technology and Innovation; Springer: Berlin/Heidelberg, Germany, 2018; pp. 877–878. [Google Scholar] [CrossRef]
- Shiri, J.; Karimi, B.; Karimi, N.; Kazemi, M.H.; Karimi, S. Simulating wetting front dimensions of drip irrigation systems: Multi criteria assessment of soft computing models. J. Hydrol. 2020, 585, 124792. [Google Scholar] [CrossRef]
- Fan, Y.; Yang, Z.; Wei, H. Establishment and verification of the prediction model of soil wetting pattern size in vertical moistube irrigation. Water Sci. Technol. Water Supply 2021, 21, 331–343. [Google Scholar] [CrossRef]
- Karimi, R.; Appels, W.M. Soil moisture dynamics in a new indoor facility for subsurface drip irrigation of field crops. Irrig. Sci. 2021, 39, 715–724. [Google Scholar] [CrossRef]
- Fan, Y.W.; Huang, N.; Zhang, J.; Zhao, T. Simulation of soil wetting pattern of vertical moistube-irrigation. Water 2018, 10, 601. [Google Scholar] [CrossRef]
- Liu, X.; He, X.; Zhang, L. Simplified method for estimating discharge of microporous ceramic emitters for drip irrigation. Biosyst. Eng. 2022, 219, 38–55. [Google Scholar] [CrossRef]
- Abid, H.N.; Abid, M.B. Predicting Wetting Patterns in Soil from a Single Subsurface Drip Irrigation System. J. Eng. 2019, 25, 41–53. [Google Scholar] [CrossRef]
- Qi, W.; Zhang, Z.; Wang, C.; Huang, M. Prediction of infiltration behaviors and evaluation of irrigation efficiency in clay loam soil under Moistube® irrigation. Agric. Water Manag. 2021, 248, 106756. [Google Scholar] [CrossRef]
- Lamm, F.R.; Ayars, J.E.; Nakayama, F.S. Microirrigation for Crop Production: Design, Operation, and Management; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Wang, J.; Huang, Y.; Long, H.; Hou, S.; Xing, A.; Sun, Z. Simulations of water movement and solute transport through different soil texture configurations under negative-pressure irrigation. Hydrol. Process 2017, 31, 2599–2612. [Google Scholar] [CrossRef]
- Cai, Y.; Zhao, X.; Wu, P.; Zhang, L.; Zhu, D.; Chen, J. Effect of soil texture on water movement of porous ceramic emitters: A simulation study. Water 2018, 11, 22. [Google Scholar] [CrossRef]
- Siyal, A.A.; Skaggs, T.H. Measured and simulated soil wetting patterns under porous clay pipe sub-surface irrigation. Agric. Water Manag. 2009, 96, 893–904. [Google Scholar] [CrossRef]
- Cai, Y.; Wu, P.; Zhang, L.; Zhu, D.; Wu, S.; Zhao, X.; Chen, J.; Dong, Z. Prediction of flow characteristics and risk assessment of deep percolation by ceramic emitters in loam. J. Hydrol. 2018, 566, 901–909. [Google Scholar] [CrossRef]
- Cai, Y.; Wu, P.; Zhang, L.; Zhu, D.; Chen, J.; Wu, S.; Zhao, X. Simulation of soil water movement under subsurface irrigation with porous ceramic emitter. Agric. Water Manag. 2017, 192, 244–256. [Google Scholar] [CrossRef]
- Kandelous, M.M.; Šimůnek, J. Numerical simulations of water movement in a subsurface drip irrigation system under field and laboratory conditions using HYDRUS-2D. Agric. Water Manag. 2010, 97, 1070–1076. [Google Scholar] [CrossRef]
- Malchev, S.; Kornov, G.; Hansmann, H. Innovative clay-based micro-irrigation system ‘SLECI’ (Self-regulating; Energy, L., Clay-based Irrigation): Preliminary results from cherry orchard trials. J. Agric. Food Environ. Sci. 2022, 76, 45–55. [Google Scholar] [CrossRef]
- DIVAGRI. Available online: https://divagri.org/sleci/ (accessed on 5 May 2021).
- Bear, J. Dynamics of Fluids in Porous Media; Courier Corporation: North Chelmsford, MA, USA, 1972. [Google Scholar]
- Schaap, M.G.; Leij, F.J.; Van Genuchten, M.T. Rosetta: A computer program for estimating soil hydraulic parameters with hierarchical pedotransfer functions. J. Hydrol. 2001, 251, 163–176. [Google Scholar] [CrossRef]
- FAO. Standard Operating Procedure for Soil Bulk Density, Cylinder Method; FAO: Rome, Italy, 2023. [Google Scholar] [CrossRef]
- Farooq, Q.U.; Naqash, M.T.; Ahmed, A.T.; Khawaja, B.A. Optimization of Subsurface Smart Irrigation System for Sandy Soils of Arid Climate. Model. Simul. Eng. 2021, 2021, 9012496. [Google Scholar] [CrossRef]
- COMSOL. The Subsurface Flow Module User’s Guide. 2023. Available online: https://doc.comsol.com/6.2/doc/com.comsol.help.ssf/SubsurfaceFlowModuleUsersGuide.pdf (accessed on 20 March 2025).
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, L.; Liu, Q.; Yang, F.; Han, M.; Yao, S. Subsurface irrigation with ceramic emitters: Optimal working water head improves yield, fruit quality and water productivity of greenhouse tomato. Sci. Hortic. 2023, 310, 111712. [Google Scholar] [CrossRef]
- Doorenbos, J.; Pruitt, W.O. Crop Water Requirements; FAO Irrigation and Drainage Paper 24; FAO: Rome, Italy, 1984. [Google Scholar]
- Naglič, B.; Kechavarzi, C.; Coulon, F.; Pintar, M. Numerical investigation of the influence of texture, surface drip emitter discharge rate and initial soil moisture condition on wetting pattern size. Irrig. Sci. 2014, 32, 421–436. [Google Scholar] [CrossRef]
- Willmott, C.J. Some comments on the evaluation of model performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Gitau, M.W.; Pai, N.; Daggupati, P. Hydrologic and water quality models: Performance measures and evaluation criteria. Trans. ASABE 2015, 58, 1763–1785. [Google Scholar]
- Wang, Z.; Zerihun, D.; Feyen, J. General irrigation efficiency for field water management. Agric. Water Manag. 1996, 30, 123–132. [Google Scholar] [CrossRef]
- Christiansen, J.E. The uniformity of application of water by sprinkler systems. Agric. Eng. 1941, 22, 89–92. [Google Scholar]
- Qi, W.; Zhang, Z.Y.; Wang, C.; Chen, Y.; Zhang, Z.M. Crack closure and flow regimes in cracked clay loam subjected to different irrigation methods. Geoderma 2020, 358, 113978. [Google Scholar] [CrossRef]
- ASAE. Field Evaluation of Micro-Irrigation Systems, 43rd ed.; ASAE: St. Joseph, MO, USA, 1996; pp. 756–761. [Google Scholar]
- Eisenhauer, D.E.; Martin, D.L.; Heeren, D.M.; Hoffman, G.J. Irrigation Systems Management; American Society of Agricultural and Biological Engineers (ASABE): St Joseph, MO, USA, 2021. [Google Scholar]
- Deb, K.; Sindhya, K.; Hakanen, J. Multi-objective optimization. In Decision Sciences; CRC Press: Boca Raton, FL, USA, 2016; pp. 161–200. [Google Scholar]
- Li, Y.; Nie, W.-B.; Feng, Z.-J. Development of a soil wetting pattern estimation model for drip irrigation. Water Supply 2023, 23, 144–161. [Google Scholar] [CrossRef]
- Vishwakarma, D.K.; Kumar, R.; Tomar, A.S.; Kuriqi, A. Eco-hydrological modeling of soil wetting pattern dimensions under drip irrigation systems. Heliyon 2023, 9, e18078. [Google Scholar] [CrossRef] [PubMed]
- Alrubaye, Y.L.; Yusuf, B.; Mohammad, T.A.; Nahazanan, H.; Zawawi, M.A.M. Experimental and Numerical Prediction of Wetting Fronts Size Created by Sub-Surface Bubble Irrigation System. Sustainability 2022, 14, 11492. [Google Scholar] [CrossRef]
- Wang, C.; Ye, J.; Zhai, Y.; Kurexi, W.; Xing, D.; Feng, G.; Zhang, Q.; Zhang, Z. Dynamics of Moistube discharge, soil-water redistribution and wetting morphology in response to regulated working pressure heads. Agric. Water Manag. 2023, 282, 108285. [Google Scholar] [CrossRef]
- Kirkham, M.B. Principles of Soil and Plant Water Relations; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Sun, Q.; Wang, Y.; Chen, G.; Yang, H.; Du, T. Water use efficiency was improved at leaf and yield levels of tomato plants by continuous irrigation using semipermeable membrane. Agric. Water Manag. 2018, 203, 430–437. [Google Scholar] [CrossRef]
- Mattar, M.A.; El-Abedin, T.K.Z.; Al-Ghobari, H.M.; Alazba, A.A.; Elansary, H.O. Effects of different surface and subsurface drip irrigation levels on growth traits, tuber yield, and irrigation water use efficiency of potato crop. Irrig. Sci. 2021, 39, 517–533. [Google Scholar] [CrossRef]
- Jia, M.; Wei, S.; Zhang, F.L.Y.; Shen, Y. Influence of soil texture and drip emitter flow rate on soil water movement under subsurface drip irrigation. Chin. J. Eco-Agric. 2025, 33, 749–758. [Google Scholar]
- Zamani, S.; Fatahi, R.; Provenzano, G. A comprehensive model for hydraulic analysis and wetting patterns simulation under subsurface drip laterals. Water 2022, 14, 1965. [Google Scholar] [CrossRef]
- Kandelous, M.M.; Šimůnek, J.; Van Genuchten, M.T.; Malek, K. Soil water content distributions between two emitters of a subsurface drip irrigation system. Soil Sci. Soc. Am. J. 2011, 75, 488–497. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Soil depth | 0–100 | cm |
| Dry density (In situ) | 1.64 | |
| Dry density (Remoulded) | 1.34 * | |
| Proportion of particle sizes | 74.8 * | % Sand |
| 14.0 * | % Silt | |
| 11.2 * | % Clay | |
| Soil textural class | sandy loam | |
| Specific gravity | 2.43 | |
| Water content (In situ) | 0.117 | |
| Water content (remoulded) | 0.048 | |
| Field capacity | 0.224 * | |
| Saturated water content (remoulded) | 0.442 | |
| Electrical conductivity | 6.2 | |
| Organic matter content | 2.20 | % |
| Carbon content | 1.28 | % |
| pH | 5.23 | – |
| Soil Depth (cm) | () | () | () | (−) | () |
|---|---|---|---|---|---|
| Sandy loam soil | |||||
| 0–100 | 0.050 | 0.442 | 0.025 | 1.430 | 1.460 |
| SLECI emitter | |||||
| 0.078 | 0.260 | 1.040 | |||
| Point | x (cm) | y (cm) | Point | x (cm) | y (cm) |
|---|---|---|---|---|---|
| A | 30 | 50 | D | 34 | 34 |
| B | 30 | 20 | E | 30 | 40 |
| C | 30 | 25 | F | 22 | 30 |
| Range | Remark |
|---|---|
| <0.60 | Unacceptable |
| 0.60 ≤ < 0.70 | Weak |
| 0.70 ≤ < 0.80 | Moderate |
| 0.80 ≤ < 0.90 | Good |
| 0.90 ≤ < 1.00 | Excellent |
| (cm) | (cm) | (mL) | Class | |||
|---|---|---|---|---|---|---|
| 125 | 40 | 422.6 | 0.807 | 0.973 | 0.948 | Good |
| 125 | 50 | 422.4 | 0.808 | 0.973 | 0.902 | Good |
| 100 | 40 | 353.9 | 0.825 | 0.970 | 0.865 | Good |
| 100 | 50 | 353.5 | 0.824 | 0.974 | 0.860 | Good |
| 125 | 30 | 420.6 | 0.809 | 0.960 | 0.849 | Good |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agbesi, W.E.K.; Sam-Amoah, L.K.; Darko, R.O.; Kumi, F.; Boafo, G. Numerical Models for Predicting Water Flow Characteristics and Optimising a Subsurface Self-Regulating, Low-Energy, Clay-Based Irrigation (SLECI) System in Sandy Loam Soil. Water 2025, 17, 2058. https://doi.org/10.3390/w17142058
Agbesi WEK, Sam-Amoah LK, Darko RO, Kumi F, Boafo G. Numerical Models for Predicting Water Flow Characteristics and Optimising a Subsurface Self-Regulating, Low-Energy, Clay-Based Irrigation (SLECI) System in Sandy Loam Soil. Water. 2025; 17(14):2058. https://doi.org/10.3390/w17142058
Chicago/Turabian StyleAgbesi, Wisdom Eyram Kwame, Livingstone Kobina Sam-Amoah, Ransford Opoku Darko, Francis Kumi, and George Boafo. 2025. "Numerical Models for Predicting Water Flow Characteristics and Optimising a Subsurface Self-Regulating, Low-Energy, Clay-Based Irrigation (SLECI) System in Sandy Loam Soil" Water 17, no. 14: 2058. https://doi.org/10.3390/w17142058
APA StyleAgbesi, W. E. K., Sam-Amoah, L. K., Darko, R. O., Kumi, F., & Boafo, G. (2025). Numerical Models for Predicting Water Flow Characteristics and Optimising a Subsurface Self-Regulating, Low-Energy, Clay-Based Irrigation (SLECI) System in Sandy Loam Soil. Water, 17(14), 2058. https://doi.org/10.3390/w17142058