
Performance Study of a Sewage Collection Device for Seawater Pond Recirculating Aquaculture System

Abstract
1. Introduction
2. Materials and Methods
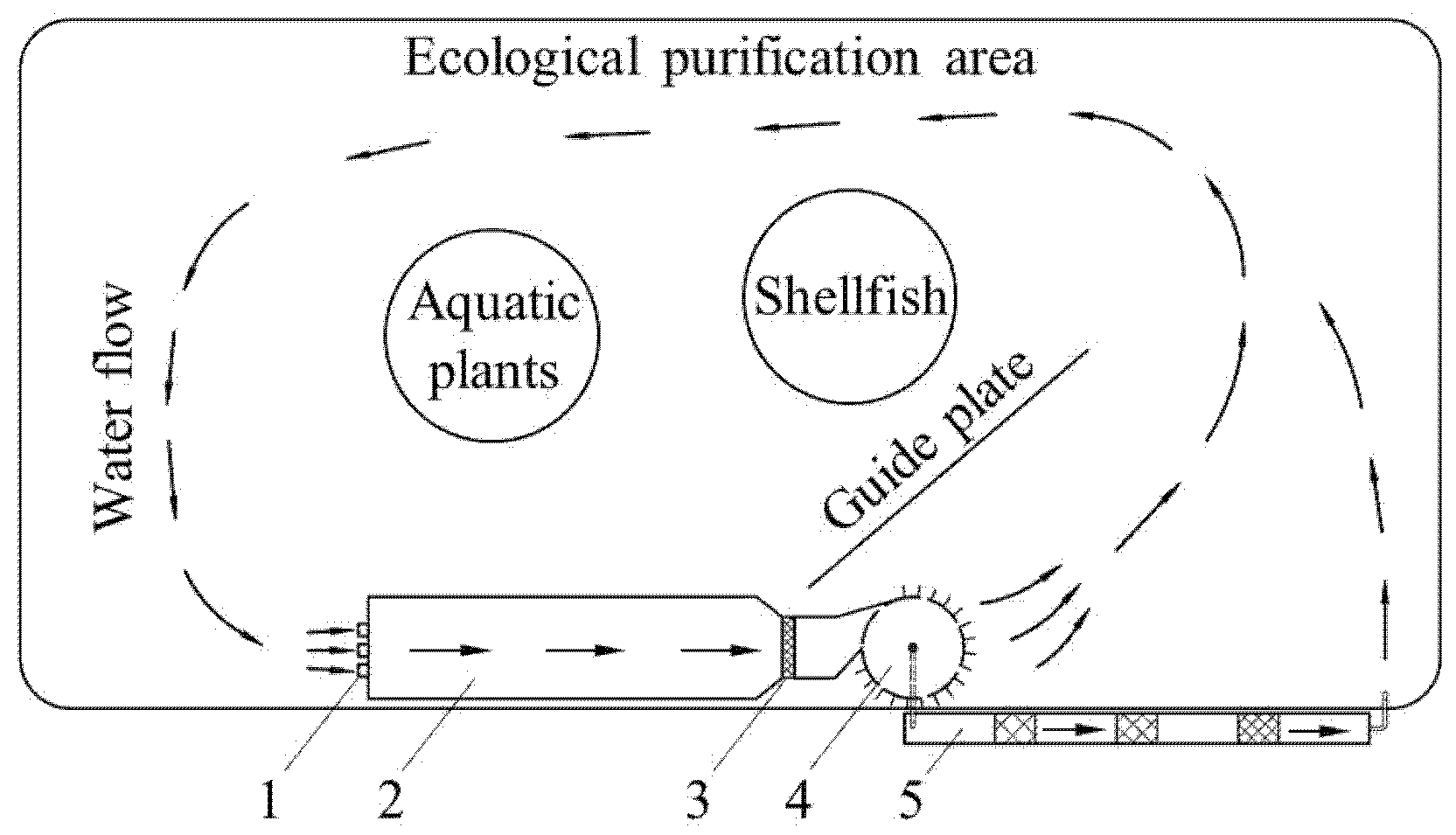
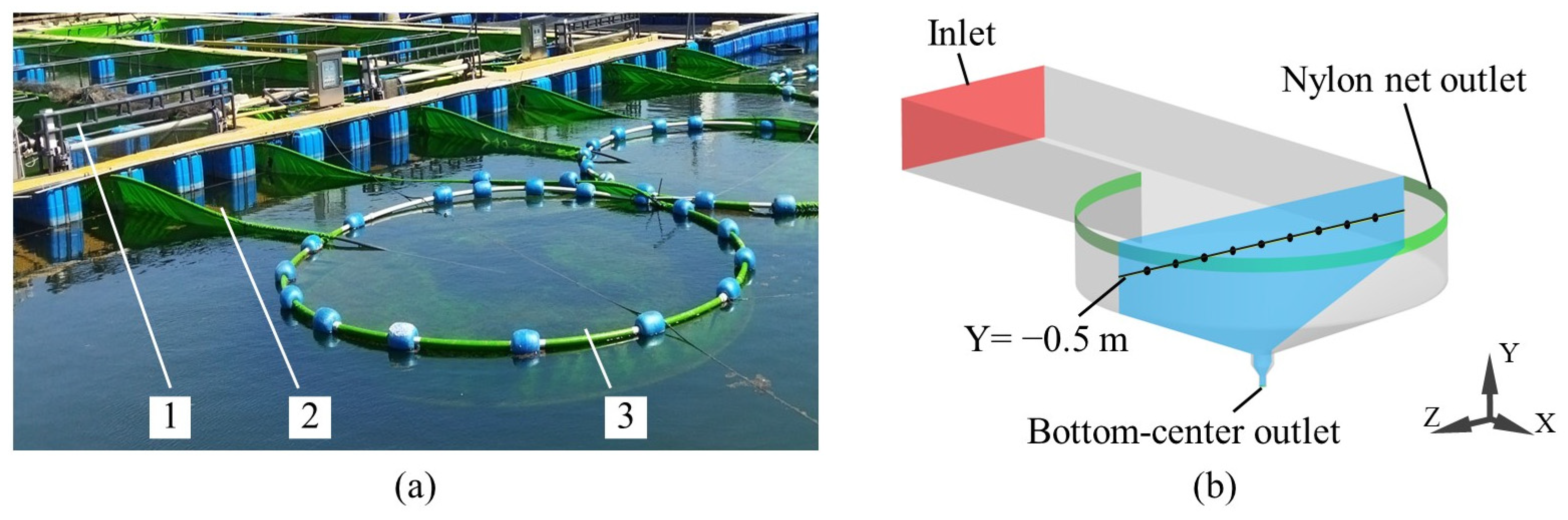
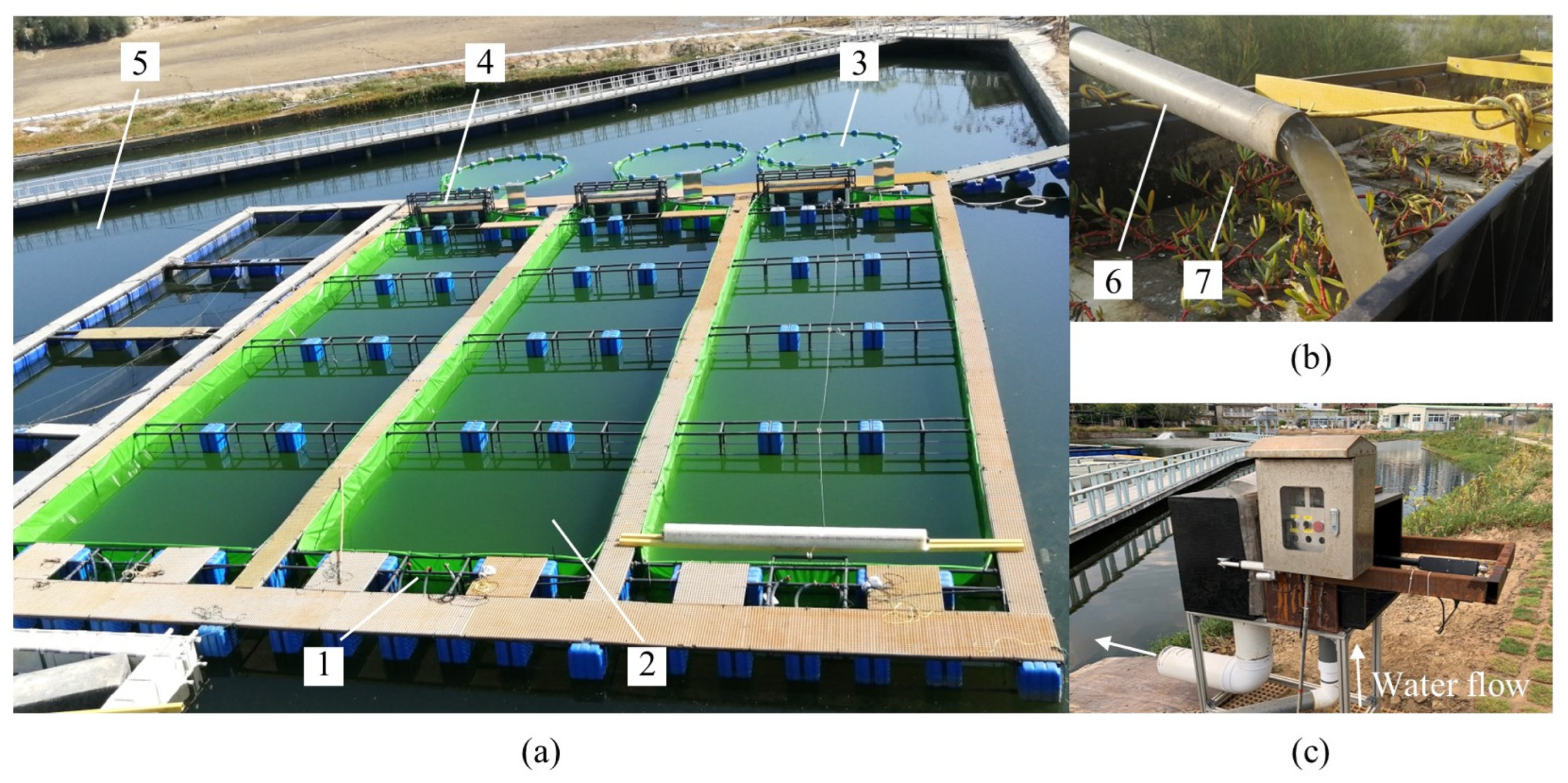
2.1. Description of the Seawater Pond Recirculating Aquaculture Mode
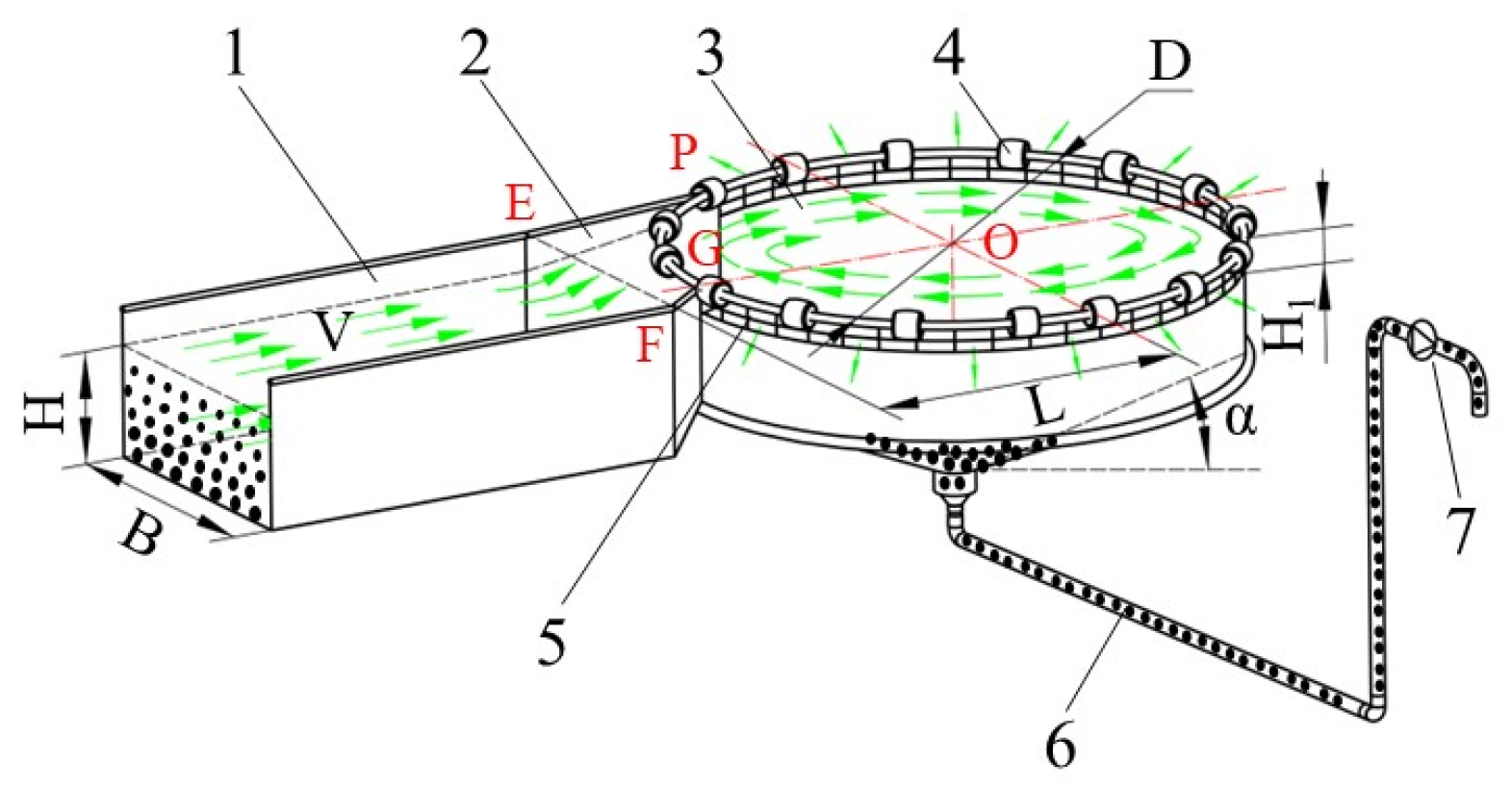
2.2. Structure of Sewage Collection Device
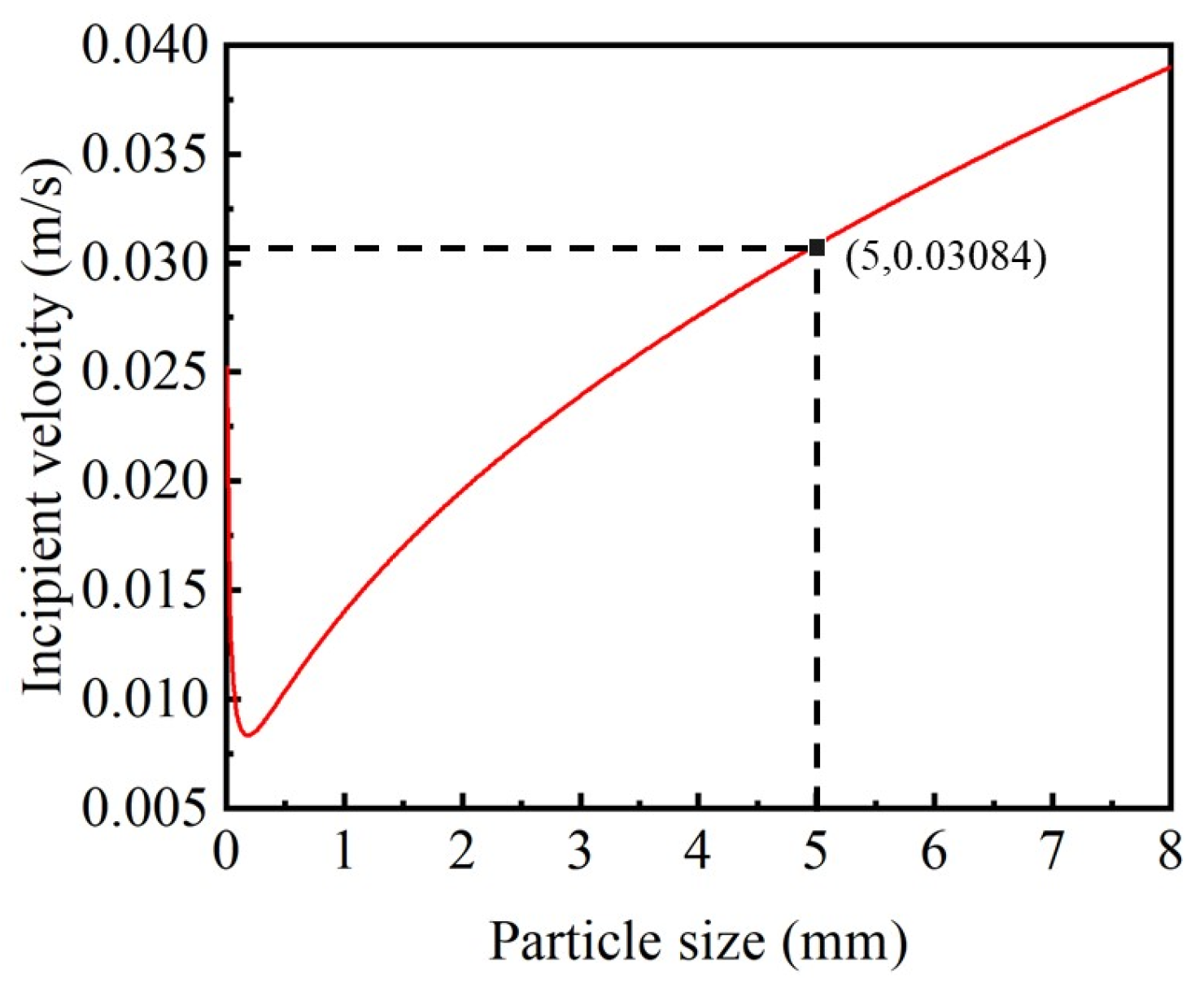
2.3. Force Analysis of Solid Particles in Water Flow
2.4. Numerical Simulation
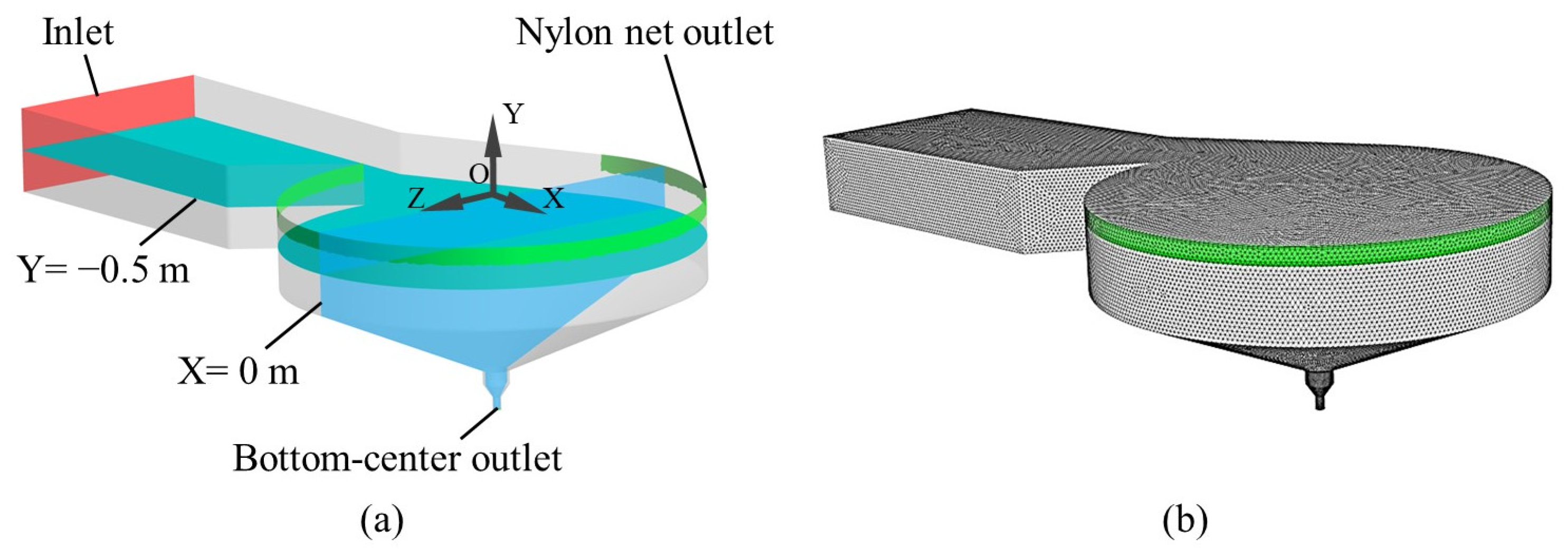
2.4.1. Meshing and Boundary Conditions
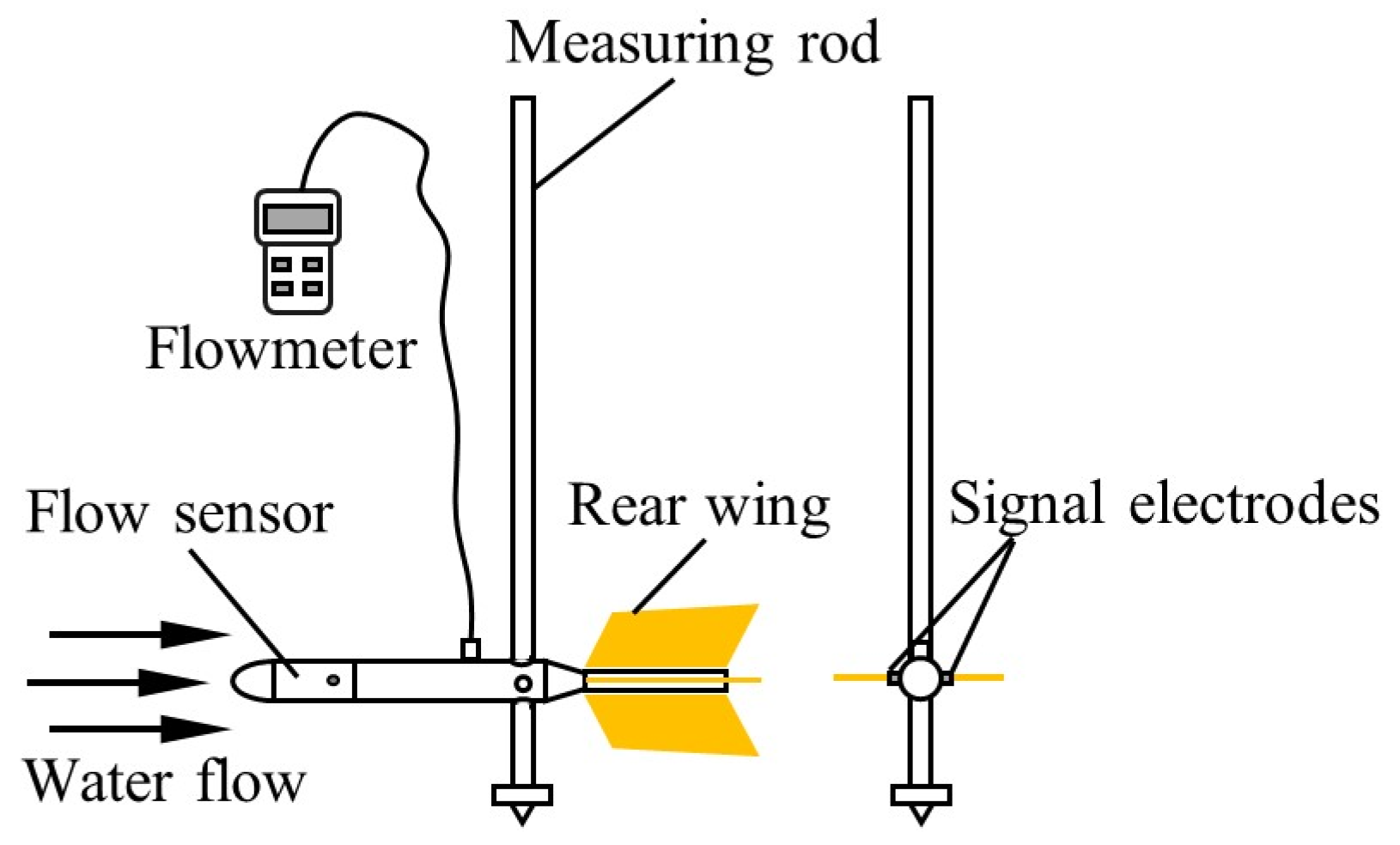
2.4.2. Experimental Measurements
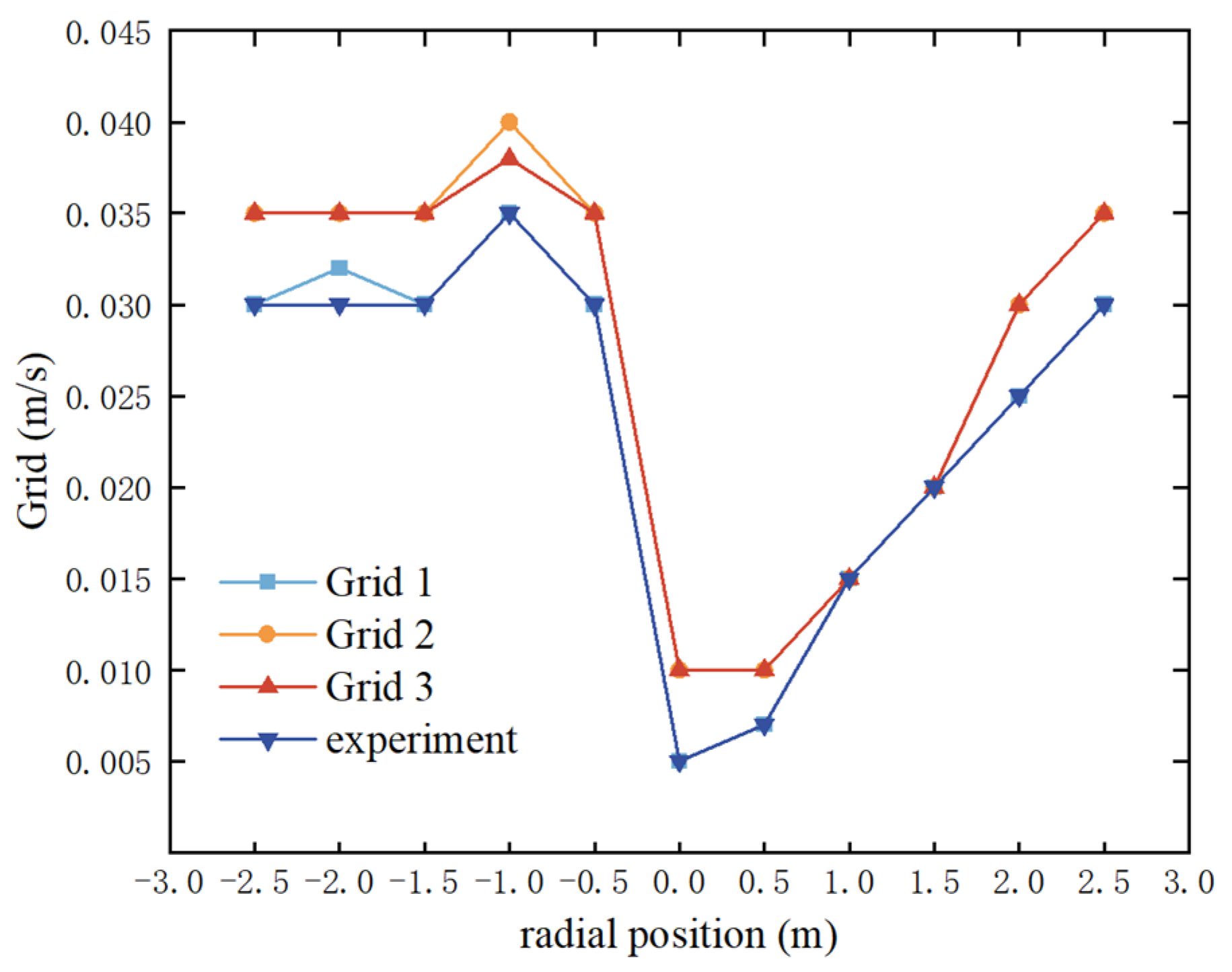
2.4.3. Model Verification
3. Results and Discussion
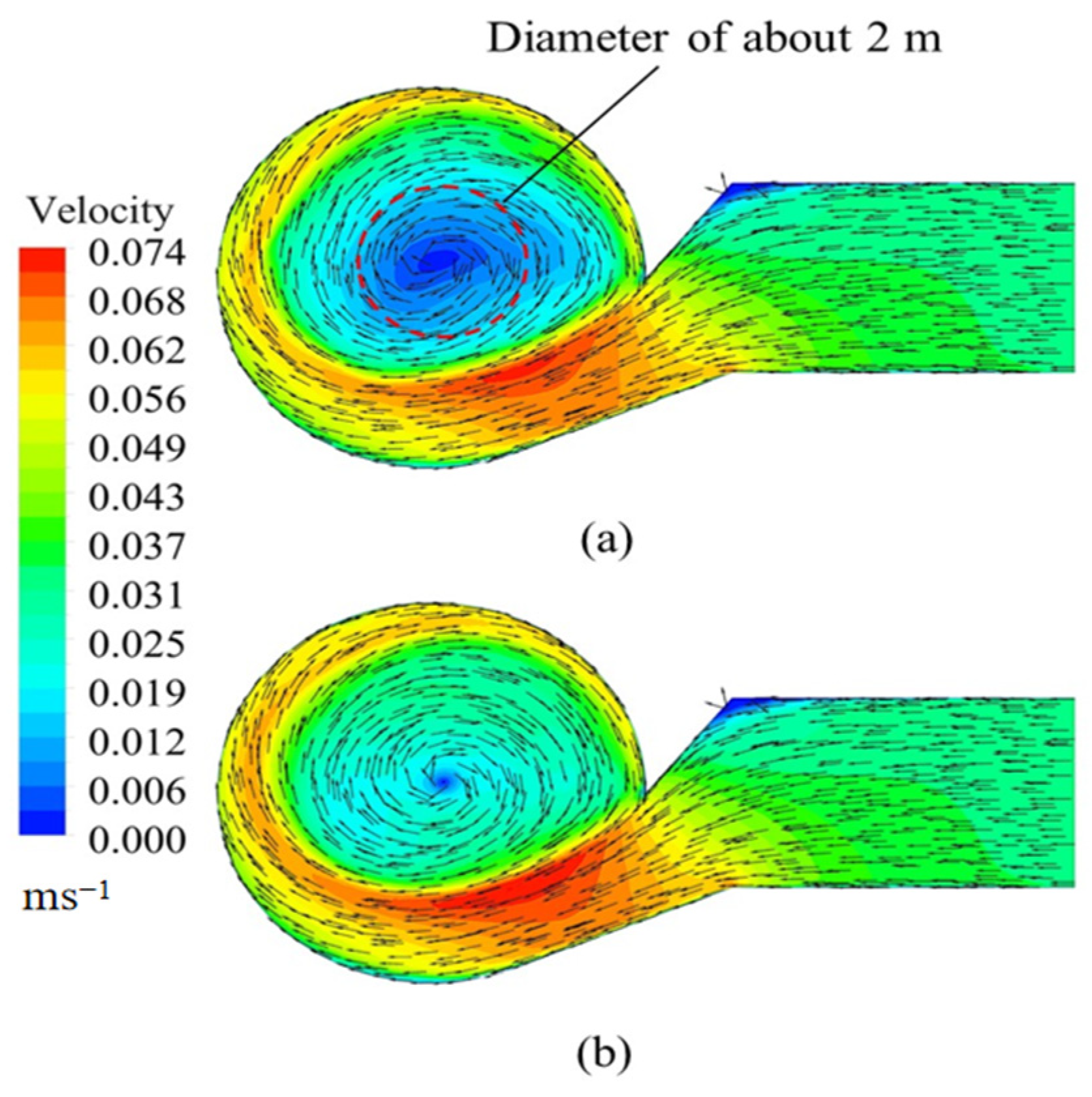
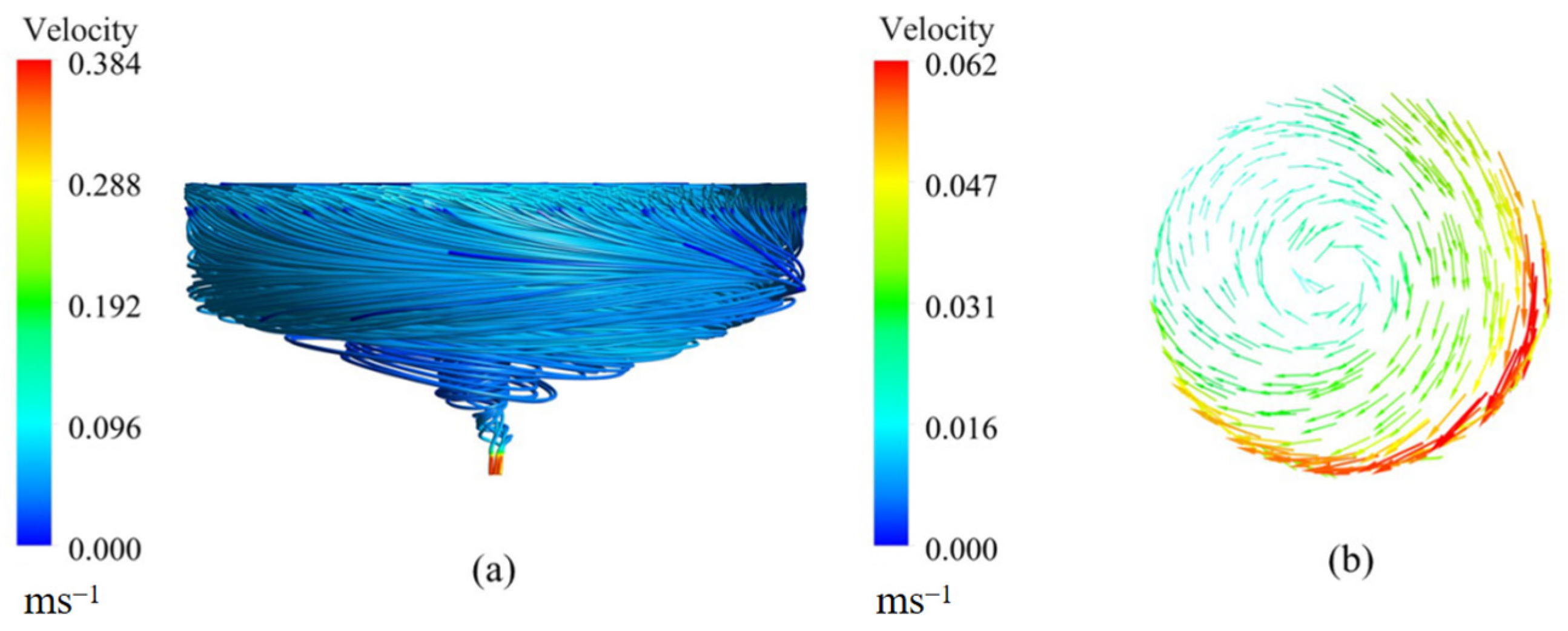
3.1. Distribution of Flow Field in Different States of the Sewage Collection Device
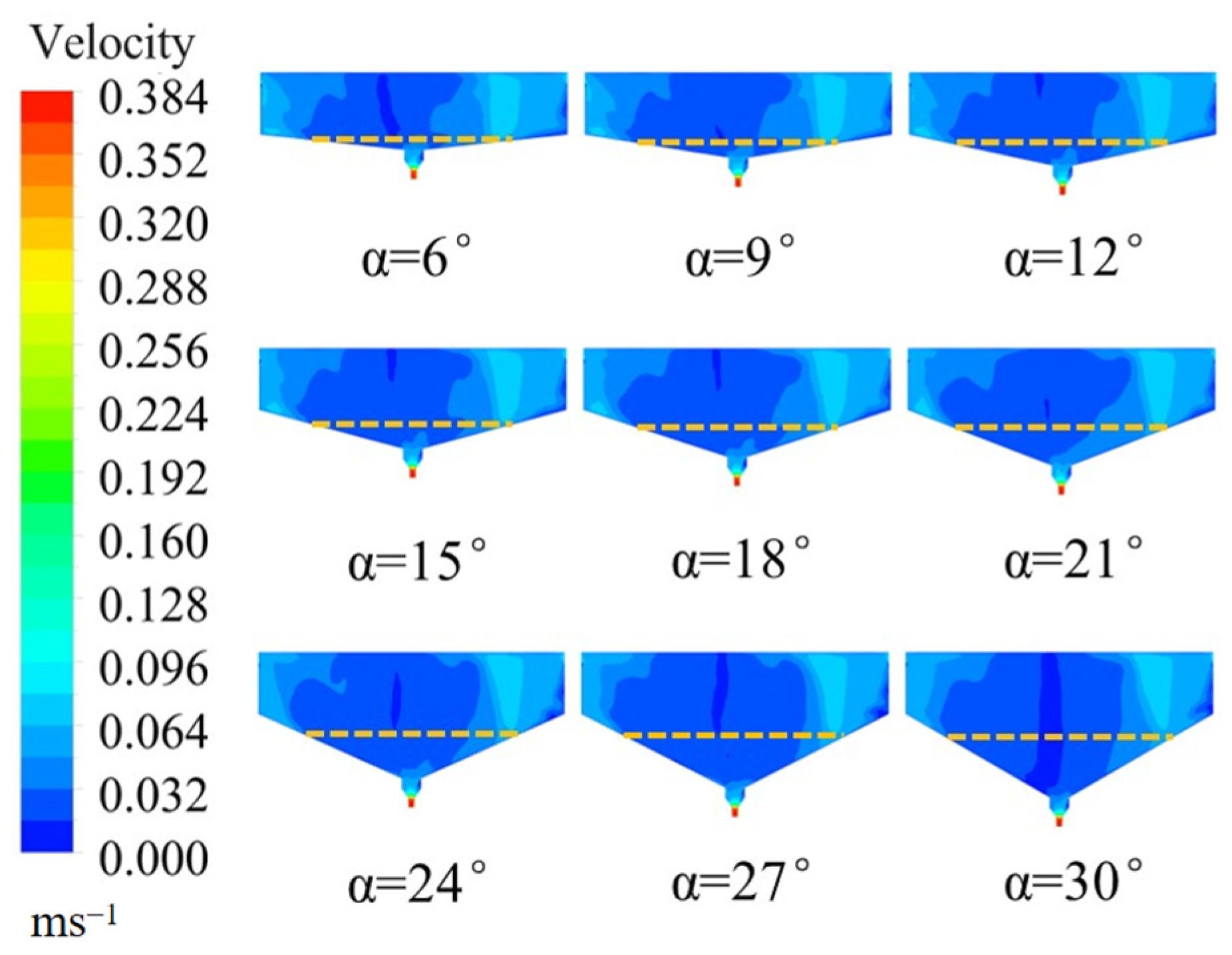
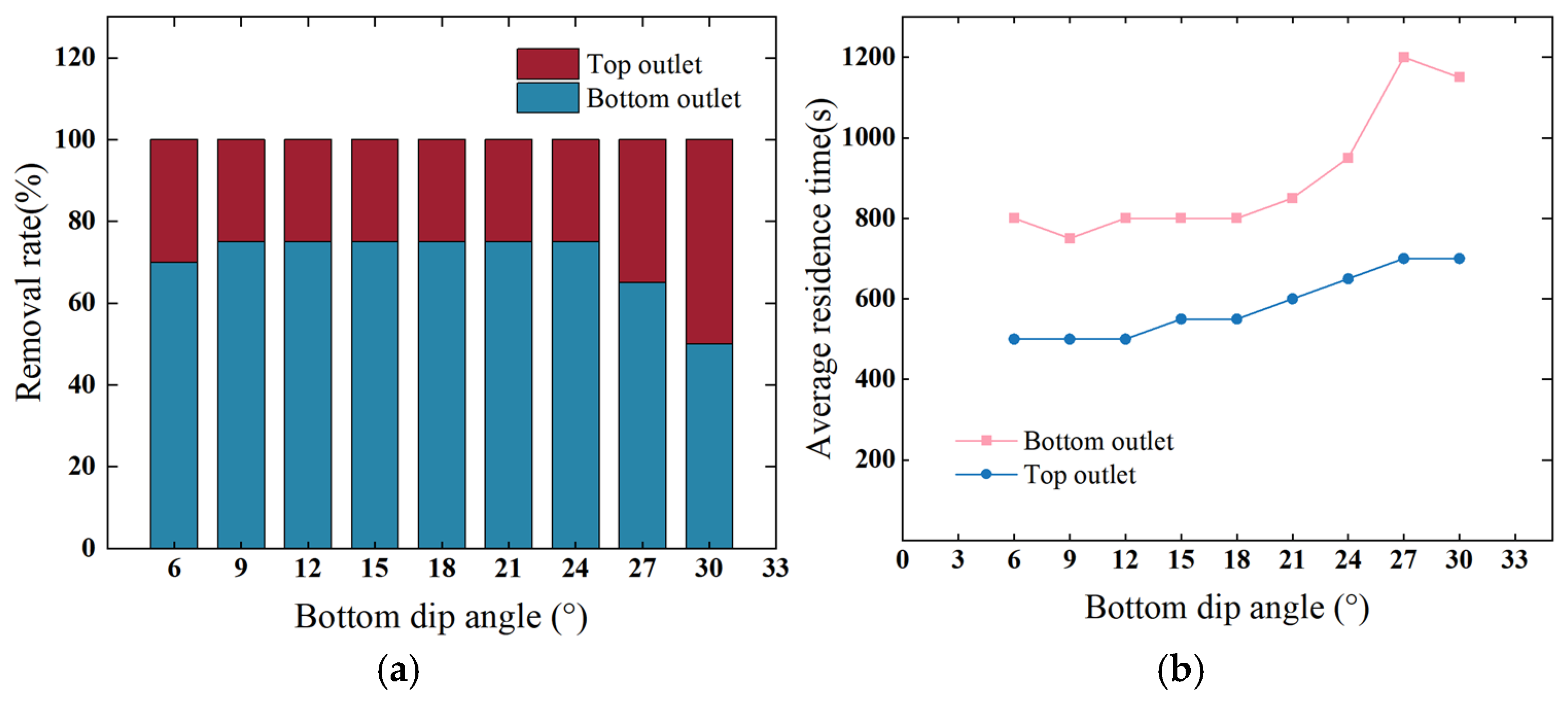
3.2. Influence of Different Bottom Dip Angles on Sewage Discharge Effect
3.3. Prototyping Testing
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- You, G.; Xu, B.; Su, H.; Zhang, S.; Pan, J.; Hou, X.; Li, J.; Ding, R. Evaluation of Aquaculture Water Quality Based on Improved Fuzzy Comprehensive Evaluation Method. Water 2021, 13, 1019. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Y.; Zhang, Q.; Liu, P.; Guo, R.; Jin, S.; Liu, J.; Chen, L.; Ma, Z.; Liu, Y. Evaluation and Analysis of Water Quality of Marine Aquaculture Area. Int. J. Environ. Res. Public Health 2020, 17, 1446. [Google Scholar] [CrossRef]
- Xiao, R.; Wei, Y.; An, D.; Li, D.; Ta, X.; Wu, Y.; Ren, Q. A review on the research status and development trend of equipment in water treatment processes of recirculating aquaculture systems. Rev. Aquac. 2018, 11, 863–895. [Google Scholar] [CrossRef]
- Han, P.; Lu, Q.; Fan, L.; Zhou, W. A Review on the Use of Microalgae for Sustainable Aquaculture. Appl. Sci. 2019, 9, 2377. [Google Scholar] [CrossRef]
- Jia, S.-P.; Wang, L.; Zhang, J.-M.; Zhang, L.; Ma, F.-R.; Huang, M.-L.; Liu, S.-S.; Gong, J.-H.; Zhang, M.; Yu, M.; et al. Comparative study on the morphological characteristics and nutritional quality of largemouth bass (Micropterus salmoides) cultured in an aquaculture system using land-based container with recycling water and a traditional pond system. Aquaculture 2022, 549, 737721. [Google Scholar] [CrossRef]
- Liu, X.; Shao, Z.; Cheng, G.; Lu, S.; Gu, Z.; Zhu, H.; Shen, H.; Wang, J.; Chen, X. Ecological engineering in pond aquaculture: A review from the whole-process perspective in China. Rev. Aquac. 2020, 13, 1060–1076. [Google Scholar] [CrossRef]
- Edwards, P. Aquaculture environment interactions: Past, present and likely future trends. Aquaculture 2015, 447, 2–14. [Google Scholar] [CrossRef]
- Boyd, C.E.; D’Abramo, L.R.; Glencross, B.D.; Huyben, D.C.; Juarez, L.M.; Lockwood, G.S.; McNevin, A.A.; Tacon, A.G.J.; Teletchea, F.; Tomasso, J.R., Jr.; et al. Achieving sustainable aquaculture: Historical and current perspectives and future needs and challenges. J. World Aquac. Soc. 2020, 51, 578–633. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, G.; Nie, Z.; Li, Q.; Shao, N.; Xu, P. Effect of Stocking Density on Growth, Serum Biochemical Parameters, Digestive Enzymes Activity and Antioxidant Status of Largemouth Bass, Micropterus salmoides. Pak. J. Zool. 2019, 51, 1509–1517. [Google Scholar] [CrossRef]
- Hou, Y.; Li, B.; Xu, G.; Li, D.; Zhang, C.; Jia, R.; Li, Q.; Zhu, J. Dynamic and Assembly of Benthic Bacterial Community in an Industrial-Scale In-Pond Raceway Recirculating Culture System. Front. Microbiol. 2021, 12, 797817. [Google Scholar] [CrossRef]
- Becke, C.; Schumann, M.; Geist, J.; Brinker, A. Shape characteristics of suspended solids and implications in different salmonid aquaculture production systems. Aquaculture 2020, 516, 734631. [Google Scholar] [CrossRef]
- Huang, B.; Liu, B.; Lie, J.; Zhai, J.; Yan, K.; Liang, Y. The research on key technology and intelligent equipment of aquaculture welfare in industrial circulating water mode. J. Fish. China 2013, 37, 1750–1760. [Google Scholar] [CrossRef]
- Tom, A.P.; Jayakumar, J.S.; Biju, M.; Somarajan, J.; Ibrahim, M.A. Aquaculture wastewater treatment technologies and their sustainability: A review. Energy Nexus 2021, 4, 100022. [Google Scholar] [CrossRef]
- Bao, W.; Zhu, S.; Guo, S.; Wang, L.; Fang, H.; Ke, B.; Ye, Z. Assessment of Water Quality and Fish Production in an Intensive Pond Aquaculture System. Trans. ASABE 2018, 61, 1425–1433. [Google Scholar] [CrossRef]
- Davidson, J.; Summerfelt, S. Solids flushing, mixing, and water velocity profiles within large (10 and 150 m3) circular ‘Cornell-type’ dual-drain tanks. Aquac. Eng. 2004, 32, 245–271. [Google Scholar] [CrossRef]
- Zhang, J.; Jia, G.; Wang, M.; Cao, S.; Mkumbuzi, S.G. Hydrodynamics of recirculating aquaculture tanks with different spatial utilization. Aquac. Eng. 2022, 96, 102217. [Google Scholar] [CrossRef]
- Yu, L.; Xue, B.; Ren, X.; Liu, Y.; Xu, T.; Shi, X.; Hu, Y.; Zhang, Q. A study on the effect of single inlet pipe structure on the hydrodynamic characteristics of single-pass rectangular arc angle culture tanks. J. Dalian Ocean. Univ. 2020, 35, 134–140. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, B.; Lei, J.; Guan, C.; Huang, B. Numerical simulation of the hydrodynamics within octagonal tanks in recirculating aquaculture systems. Chin. J. Oceanol. Limnol. 2016, 35, 912–920. [Google Scholar] [CrossRef]
- Stockton, K.A.; Moffitt, C.M.; Watten, B.J.; Vinci, B.J. Comparison of hydraulics and particle removal efficiencies in a mixed cell raceway and Burrows pond rearing system. Aquac. Eng. 2016, 74, 52–61. [Google Scholar] [CrossRef]
- Sun, D.; Liu, F. Pollution discharge performance and bottom slope optimization of aquaculture tanks for intensive pond aquaculture. J. Fish. China 2019, 43, 946–957. [Google Scholar]
- Pfeiffer, T.J.; Osborn, A.; Davis, M. Particle sieve analysis for determining solids removal efficiency of water treatment components in a recirculating aquaculture system. Aquac. Eng. 2008, 39, 24–29. [Google Scholar] [CrossRef]
- Chien, N.; Wan, Z.H. Mechanics of Sediment Transport; American Society of Civil Engineers: Reston, VA, USA, 2003. [Google Scholar]
- Li, L.L.; Zhang, G.G.; Wu, Z.; Gao, Y. Incipient motion velocity of non-cohesive uniform sediment particles on the positive and negative slopes. Sediment Res. 2016, 6, 54–59. [Google Scholar] [CrossRef]
- Zhang, H.W. A unified formula for incipient velocity of sediment. Hydraul. Eng. 2012, 43, 1387–1396. [Google Scholar] [CrossRef]
- Liu, S.G.; Liu, H.F.; Shu, H.S.; Zhao, D.; Xu, Z.; Zhang, L. Flow noise reduction of outboard valves based on internal flow path optimization. Harbin Eng. Univ. 2013, 34, 511–516. [Google Scholar] [CrossRef]
- Gorle, J.; Terjesen, B.; Summerfelt, S. Hydrodynamics of octagonal culture tanks with Cornell-type dual-drain system. Comput. Electron. Agric. 2018, 151, 354–364. [Google Scholar] [CrossRef]
- Xue, B.; Zhao, Y.; Bi, C.; Cheng, Y.; Ren, X.; Liu, Y. Investigation of flow field and pollutant particle distribution in the aquaculture tank for fish farming based on computational fluid dynamics. Comput. Electron. Agric. 2022, 200, 107243. [Google Scholar] [CrossRef]
- Ebeling, J.M.; Timmons, M.B. Recirculating Aquaculture Systems. In Aquaculture Production Systems; Cayuga Aqua Ventures, LLC: Freeville, NY, USA, 2012; pp. 245–277. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Parameter | Symbol | Values |
|---|---|---|
| Width of the water inlet | B | 2.5 m |
| Depth of the water inlet | H | 1 m |
| The vertical distance from the front section of the shrinkage trough to the center O point of the sewage collecting cone trough | L | 3.5 m |
| Diameter of the cylindrical section of the sewage collecting cone trough | D | 5 m |
| Height of nylon net outlet | H1 | 0.2 m |
| Diameter of bottom-center outlet | d | 0.102 m |
| The bottom dip angle of the sewage collecting cone trough | α | 6°, 9°, 12°, 15°, 18°, 21°, 24°, 27°, 30° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Z.; Huang, Z.; Xu, Z.; Zhang, Y. Performance Study of a Sewage Collection Device for Seawater Pond Recirculating Aquaculture System. Water 2025, 17, 1972. https://doi.org/10.3390/w17131972
Cao Z, Huang Z, Xu Z, Zhang Y. Performance Study of a Sewage Collection Device for Seawater Pond Recirculating Aquaculture System. Water. 2025; 17(13):1972. https://doi.org/10.3390/w17131972
Chicago/Turabian StyleCao, Zhixiang, Zhongming Huang, Zhilong Xu, and Yu Zhang. 2025. "Performance Study of a Sewage Collection Device for Seawater Pond Recirculating Aquaculture System" Water 17, no. 13: 1972. https://doi.org/10.3390/w17131972
APA StyleCao, Z., Huang, Z., Xu, Z., & Zhang, Y. (2025). Performance Study of a Sewage Collection Device for Seawater Pond Recirculating Aquaculture System. Water, 17(13), 1972. https://doi.org/10.3390/w17131972