1. Introduction
Among various geological disasters, landslides are characterized by their wide distribution, high frequency of occurrence, and significant damage. They can be divided into three categories according to the time that they occurred, i.e., ancient landslides, old landslides, and recent landslides. Ancient landslides refer to landslides that took place prior to the Holocene and are of higher stability. Old landslides refer to landslides that occurred during the Holocene and are currently stable overall but may be unstable locally. Recent landslides refer to landslides that just took place or are taking place and whose stability is poor; thus, this is the category that deserves the most attention in engineering. For recent landslides, a number of cracks are typically observed at their trailing edges, sides, and leading edges. These cracks often serve as ideal pathways for rainfall infiltration, which can significantly increase the risk of landslide recurrence, posing a threat to the safety of the people involved in the landslide disaster rescue on site. This issue is particularly prominent in red clay landslides, attributed to the inherent structure of red clay, which includes a high proportion of voids and fissures. As a result, this study mainly focuses on the stability analysis of recent red clay landslides considering the influence of cracks and rainfall.
Extensive research has been conducted on slope stability analysis, yielding substantial results. However, most studies focus on slopes before sliding occurs. Even though a few investigators have explored the stability of already failed slopes, their studies primarily focus on ancient or old landslides. For example, Yang et al., Hu et al., Zhu et al. and Frink et al. studied the stability of ancient or old landslides with field survey and monitoring, satellite remote sensing, optical remote sensing dynamic monitoring, drone aerial survey, and numerical simulation [
1,
2,
3,
4,
5,
6,
7,
8]. While these studies have contributed to understanding the resurrection of ancient or old landslides, the restoration of the shear strength of the slip zone in a recent landslide is limited, and surface cracks remain unblocked. Consequently, findings from ancient or old landslide studies cannot be directly applied to recent landslides. The stability of a recent landslide, i.e., the Gaokanzi Landslide in Xintang, Enshi, Hubei, China, was analyzed using the transfer coefficient method [
9]. However, only the natural unit weight of the soil and the unit weight under a once-in-50-years heavy rain scenario were considered. The parameters such as the angle of internal friction and the cohesion of both the slide mass and the slide zone in the two scenarios were considered without considering the influence of cracks and rainfall infiltration. A hydraulic coupling numerical analysis was carried out to simulate the resurrection of a recent loess landslide by Wang et al. [
10]. However, only three kinds of rainfall conditions, i.e., light rain, moderate rain, and heavy rainstorm, were considered, without considering the influence of crack state. The study by Wang et al. [
11] shows that abundant loose material sources and dominant joint (crack) structures could provide fundamental conditions for the resurrection of a recent landslide and the transition from a shallow slide to a deep slide. In their study, only natural conditions and heavy rainfall scenarios were considered, which were insufficient. Recently, the reverse analysis method and cloud model method have been employed to evaluate the stability of a recent landslide [
12]. However, the degree of influence of the length, width, depth, and position of cracks on the stability of the recent landslide was not considered.
Based on the above facts, previous researchers seldom considered both rainfall conditions and crack states simultaneously, despite their interaction and mutual constraints [
13,
14,
15,
16,
17,
18]. At present, machine learning is being widely used as a prediction approach in various fields. Every machine learning model, such as Decision Tree (DT) [
19], K-Nearest Neighbors (KNN) [
20], Naive Bayes (NB) [
21], Random Forest (RF) [
22], eXtreme Gradient Boosting (XGBoost) [
23], and Support Vector Regression (SVR) [
24], has its advantages and disadvantages. For example, the XGBoost model has the advantages of nonlinear data processing, low computational cost, fast operation speed, and improved prevention of overfitting [
25,
26]. However, it has the disadvantage of sensitivity to outliers. The SVR model can effectively solve practical issues, such as small sample sizes, nonlinearity, high dimensionality, and local minima, demonstrating excellent generalization performance [
27,
28]. However, it has the shortcomings of slow training and difficult parameter selection. It was believed that combining multiple single-machine learning models can yield a prediction model with superior performance [
29,
30,
31,
32].
In view of the above facts, in this study, based on a recent red clay landslide, crack state (mainly including width and depth) and rainfall conditions were considered simultaneously, in addition to nine parameters, such as slope height, slope angle, and the cohesion and degree of internal friction of soil. The stability analyses of the landslide with different parameter values were conducted using the software GeoStudio. Subsequently, an adaptive weighted XGBoost–PSO–SVR hybrid model was trained with the simulation results to establish a prediction model. The validity of the model was validated by comparing its prediction results with those of single-machine-learning models like XGBoost, PSO–SVR, and DT. Finally, the reliability of the model was further verified by a case study of a recent red clay landslide in Yongchun County, Fujian Province, China. This study provided a new approach for the stability analysis of recent landslides under the comprehensive consideration of various factors, particularly rainfall conditions and crack status.
4. Justification
For a recent failed slope in Lengshuicun, Yongchun County, China, as reported in reference [
12], the XGBoost–PSO–SVR model established in this study was used for comparison. Since the opening width at the rear edge of the slide mass of this slope was approximately 0.3 to 1 m, the main crack width was taken as 1.0 m. Moreover, since the rear edge of the slope body had already moved down as a whole by approximately 2 to 2.5 m, the main crack depth was taken as 2.5 m. Since there was rainfall from 4–7 November 2016, with a total rainfall of 126.1 mm, the rainfall duration was taken as 4 days, and the rainfall intensity was taken as 31.525 mm/day. According to the field investigation, as shown in
Figure 8 and
Figure 9, the crack area ratio at the top of the slope was estimated to be 20%, and the crack area ratio on the surface of slope was taken as 10%. The values of the other parameters are shown in
Table 6.
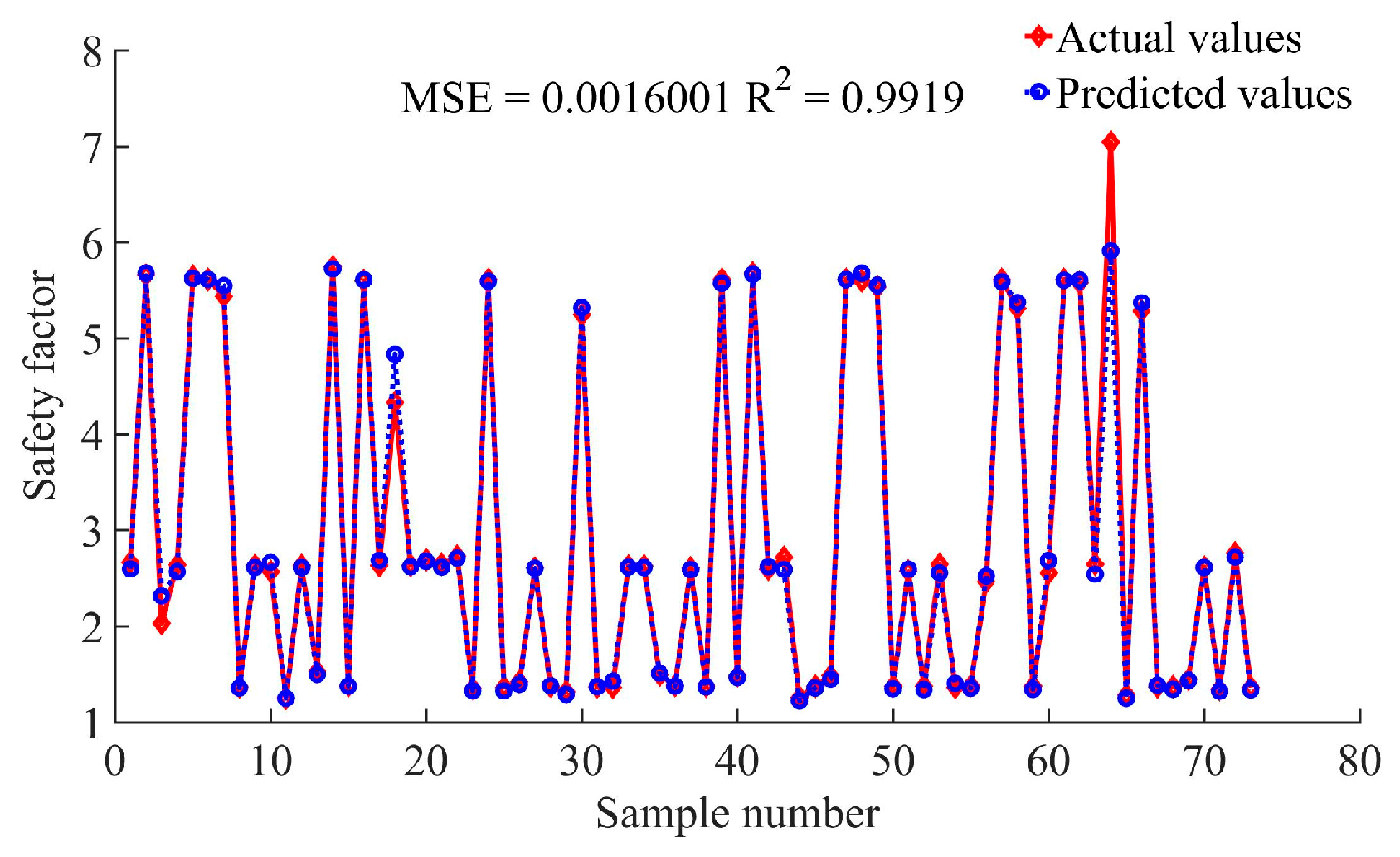
The parameters listed in
Table 6 were input into the XGBoost–PSO–SVR model for prediction, and the results are shown in
Figure 10.
It is evident from
Figure 10 that the model predicted the 74th sample for this slope, with a value of 0.966. According to the Technical Code for Building Slope Engineering of China (GB50330-2013) [
45], the stability state of this slope was unstable. According to the reference [
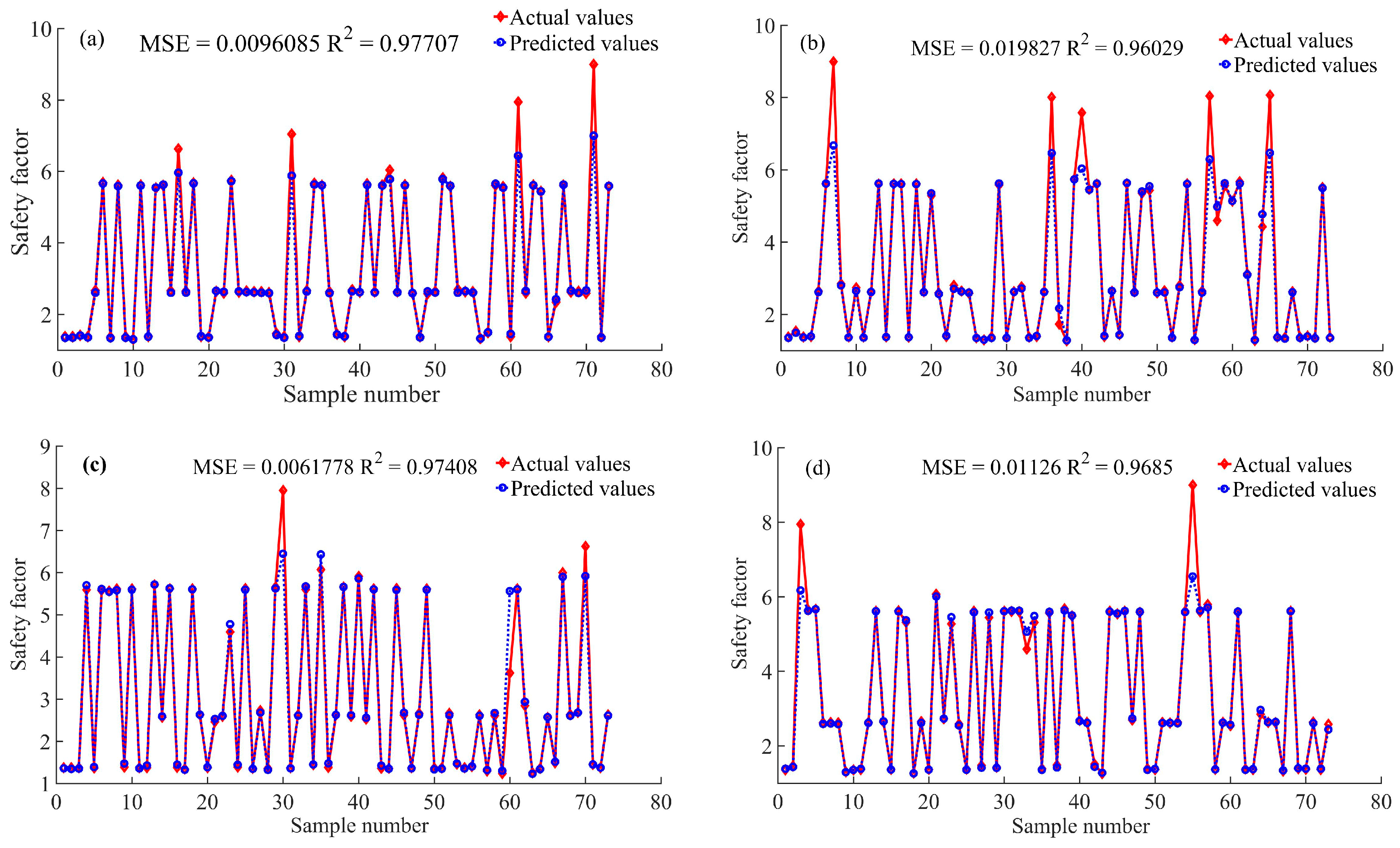
12], the soil at the front edge of the slope moved forward by approximately 0.5 m from 4 to 7 November 2016, verifying the accuracy of the XGBoost–PSO–SVR model. The primary cause of the slope failure was the intense rainfall, which significantly increased the pore water pressure and reduced the shear strength of the soil. The total rainfall of 126.1 mm over the four-day period led to increased pore water pressure and soil saturation, which in turn reduced the effective stress and shear strength of the soil. The infiltration of rainwater into the slope body also increased the pore water pressure, particularly in the slip zone, leading to a decrease in the effective normal stress, thus reducing the soil’s resistance to slide. The high rainfall amount caused the soil to become saturated, further reducing its shear strength and increasing the likelihood of slope failure. These conditions collectively led to the slope failure. The safety factors obtained by using XGBoost, PSO–SVR, DT, KNN, NB, and RF for this slope are shown in
Table 7.
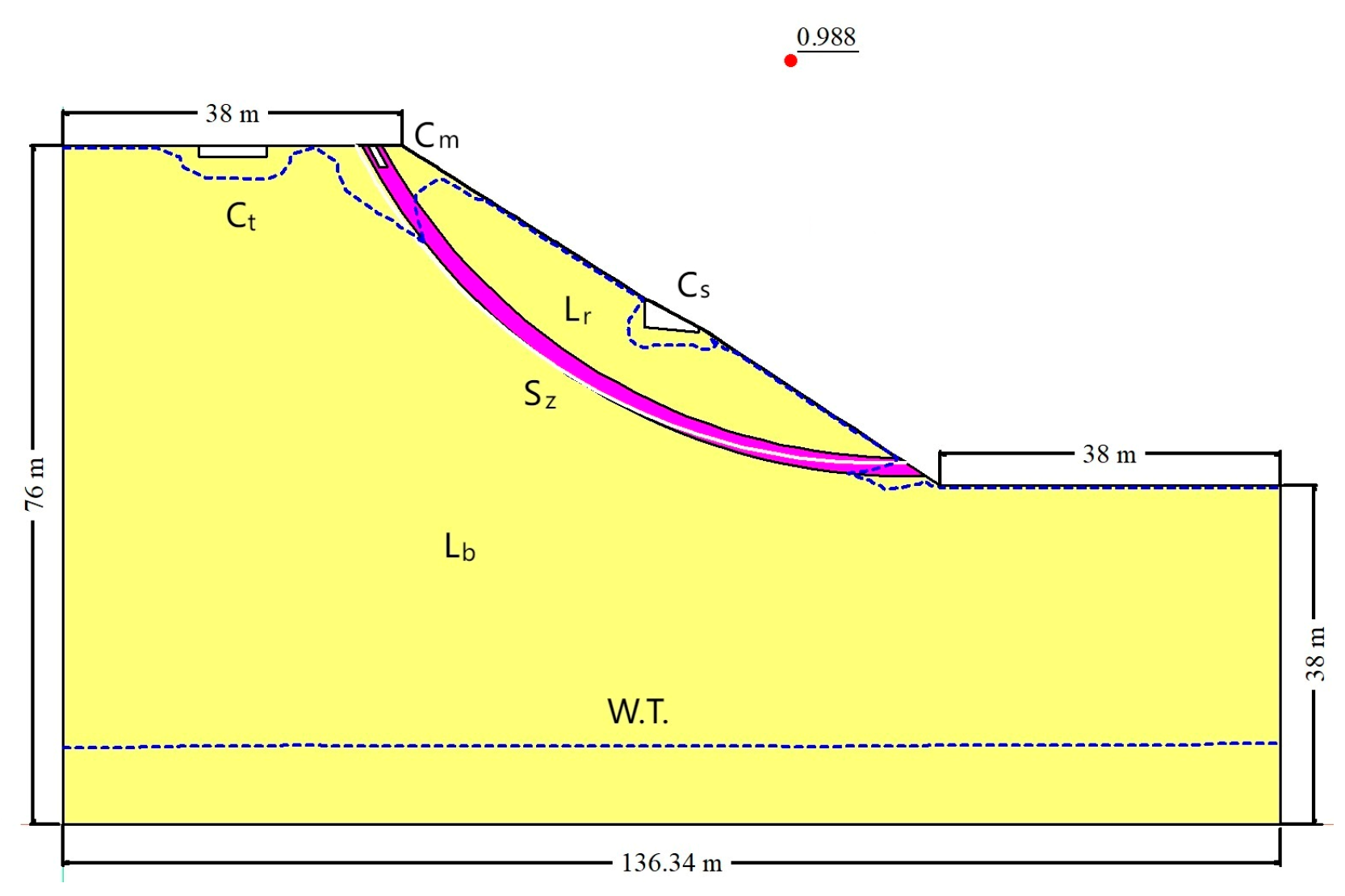
The numerical analysis of this slope using the software GeoStudio yielded a safety factor of 0.988, as shown in
Figure 11. It is evident from
Table 7 that the deviation between the predicted value obtained using XGBoost–PSO–SVR and the numerical analysis value was 0.022. Although this deviation was larger than that of XGBoost and DT, the prediction values of XGBoost and DT were both greater than 1. According to the Technical Code for Building Slope Engineering of China, the stability state of this slope should be judged as under stable, which did not match the actual situation of the slope slide. Therefore, in general, when compared with other methods, the prediction of XGBoost–PSO–SVR was closer to the actual situation.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}