
Water Quality Inversion of a Typical Rural Small River in Southeastern China Based on UAV Multispectral Imagery: A Comparison of Multiple Machine Learning Algorithms

 and
and 
Abstract
1. Introduction
2. Materials and Methods
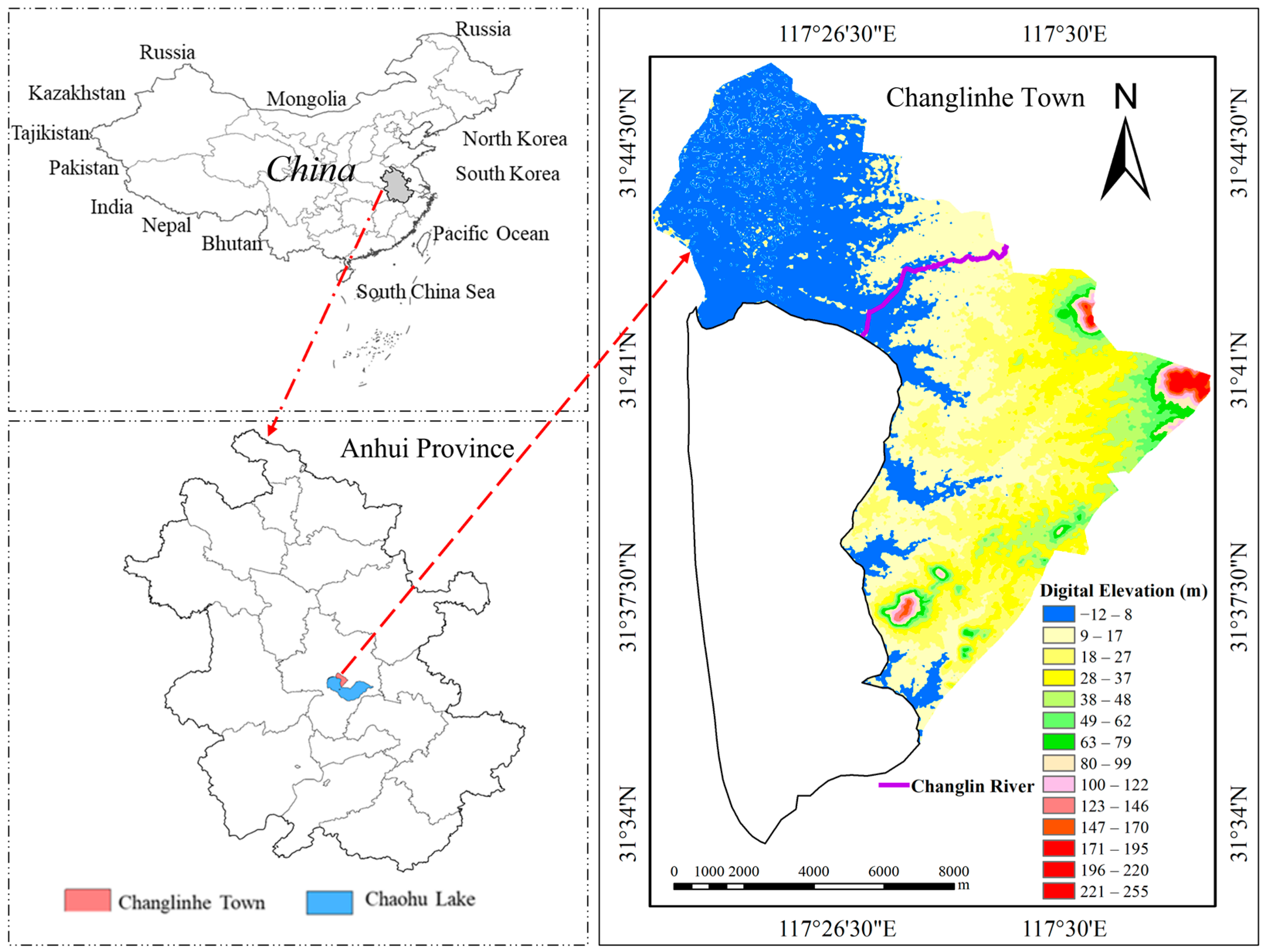
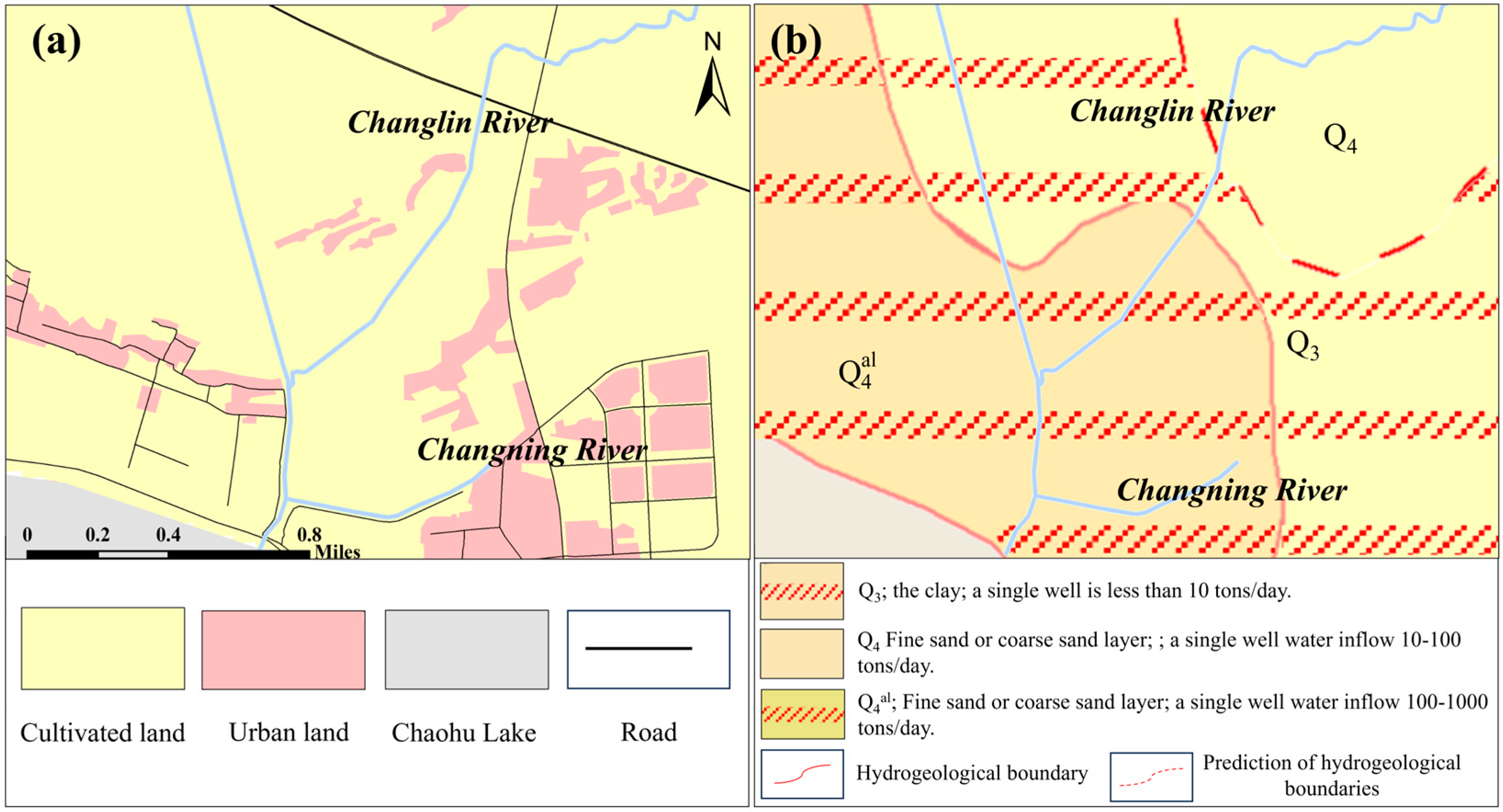
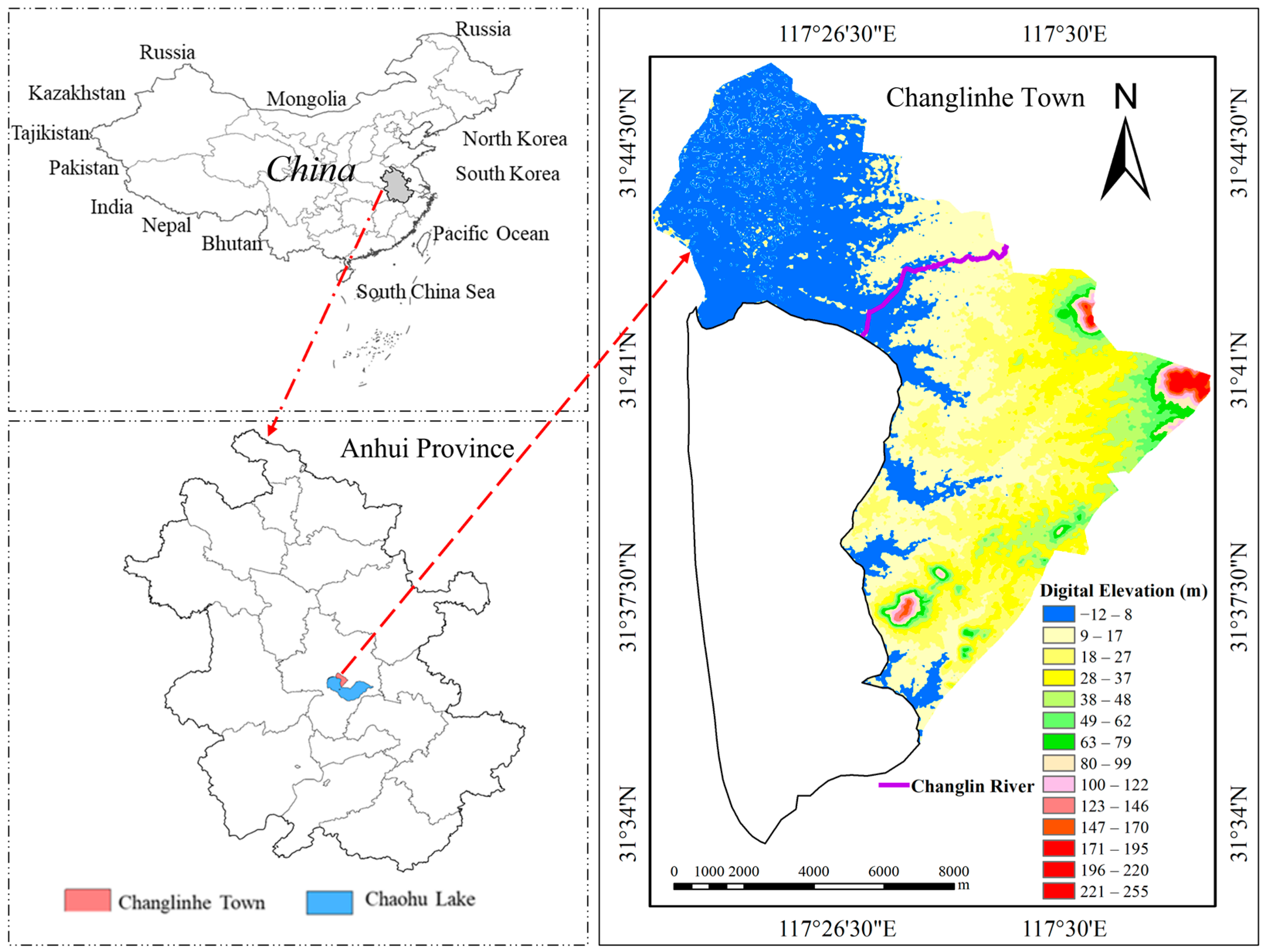
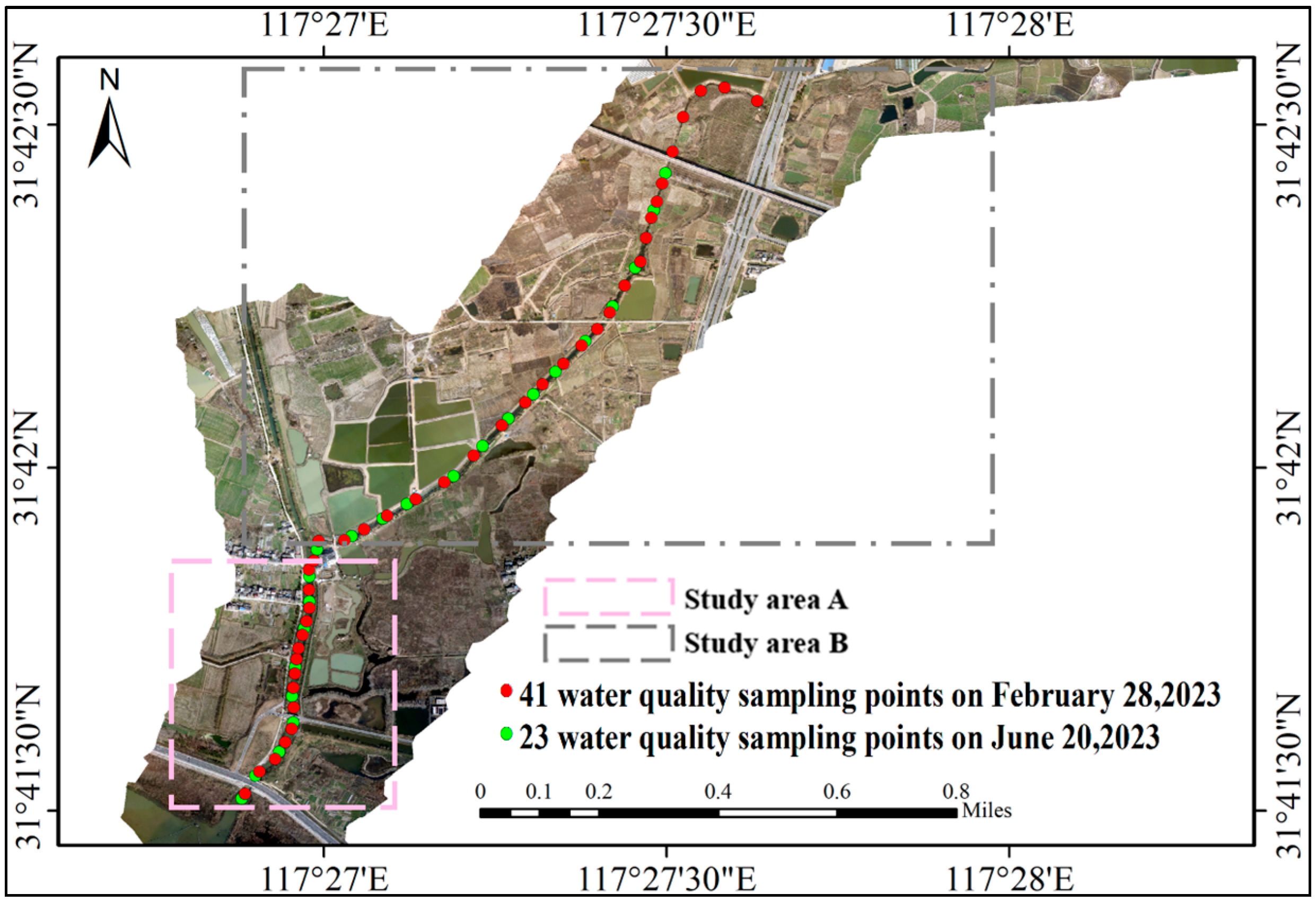
2.1. Study Area
2.2. Data Acquisition
2.2.1. UAV Multispectral Images Collection and Processing
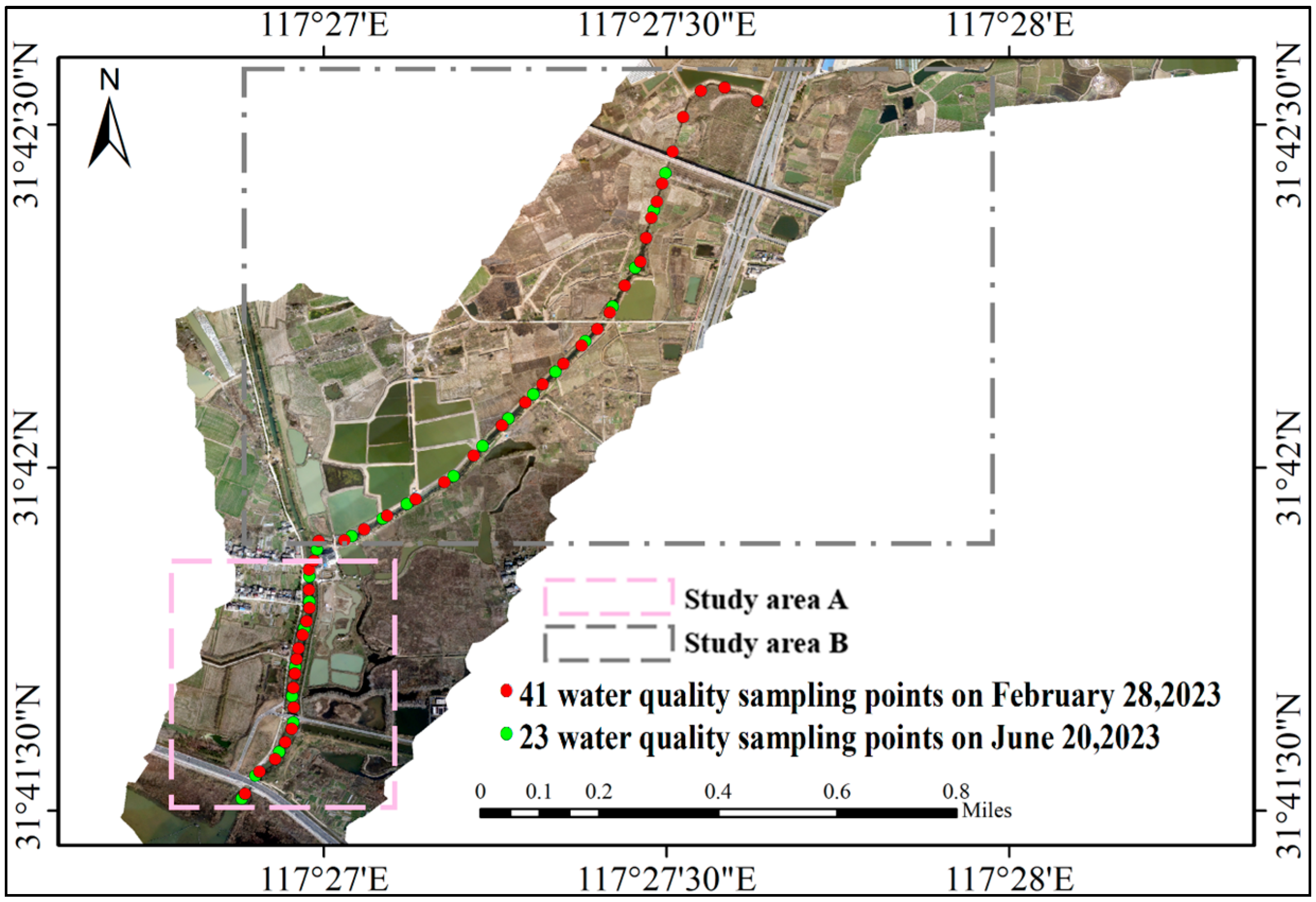
2.2.2. Manual Monitoring Data
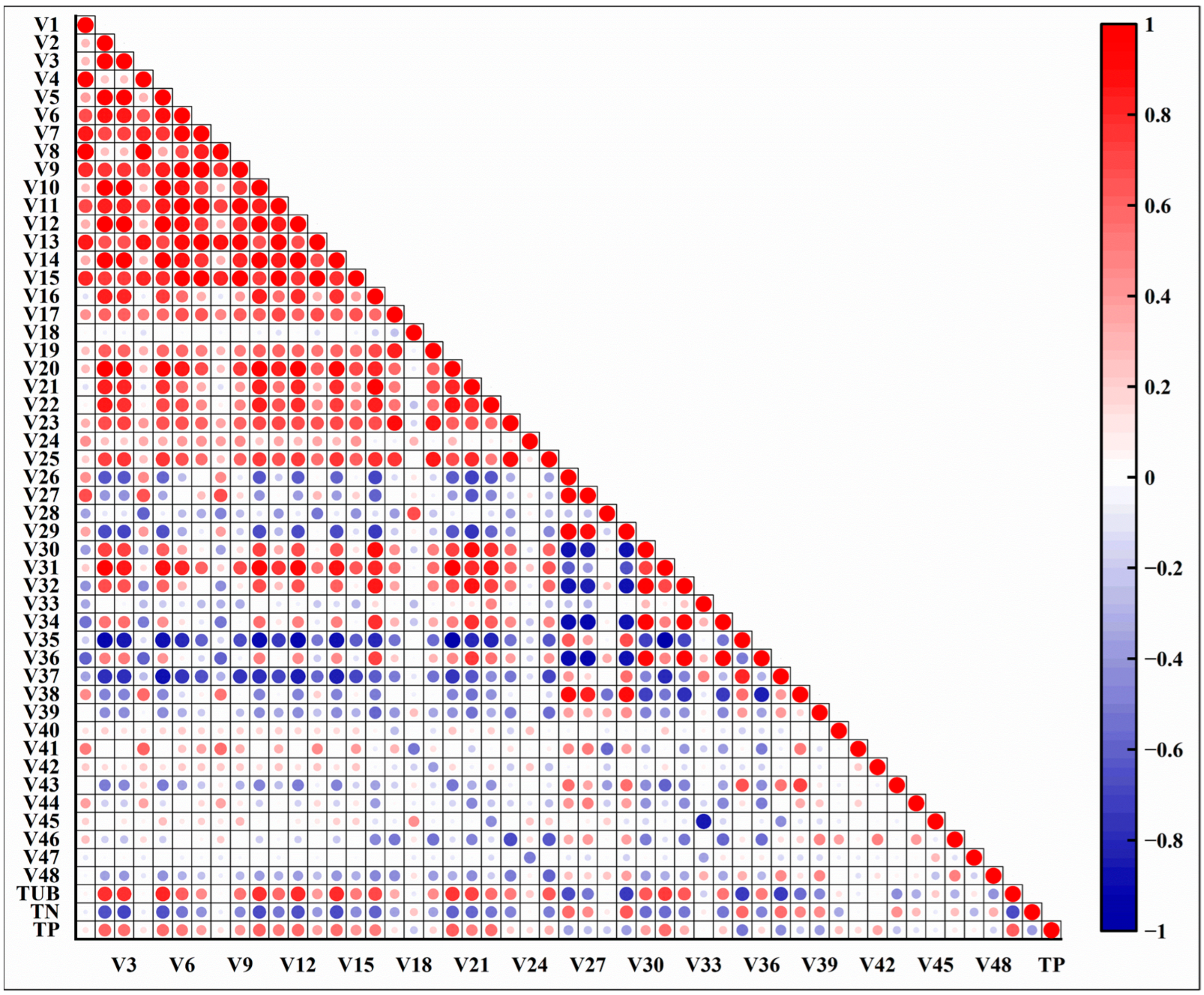
2.3. Correlation Analysis and Model Input
2.4. Machine Learning Models
2.4.1. Ridge Regression (RR)
2.4.2. Random Forest (RF) and Grid Search Random Forest (GS-RF)
2.4.3. Support Vector Regression (SVR) and Grid Search Support Vector Regression (GS-SVR)
2.4.4. Extreme Gradient Boosting Regression (XGBoost)
2.4.5. Deep Neural Networks (DNN)
2.4.6. Convolutional Neural Networks (CNN)
2.4.7. Catboost Regression (CBR)
2.5. Model Evaluation
2.6. Model Stability Evaluation
2.7. Model Suitability Evaluation
3. Results
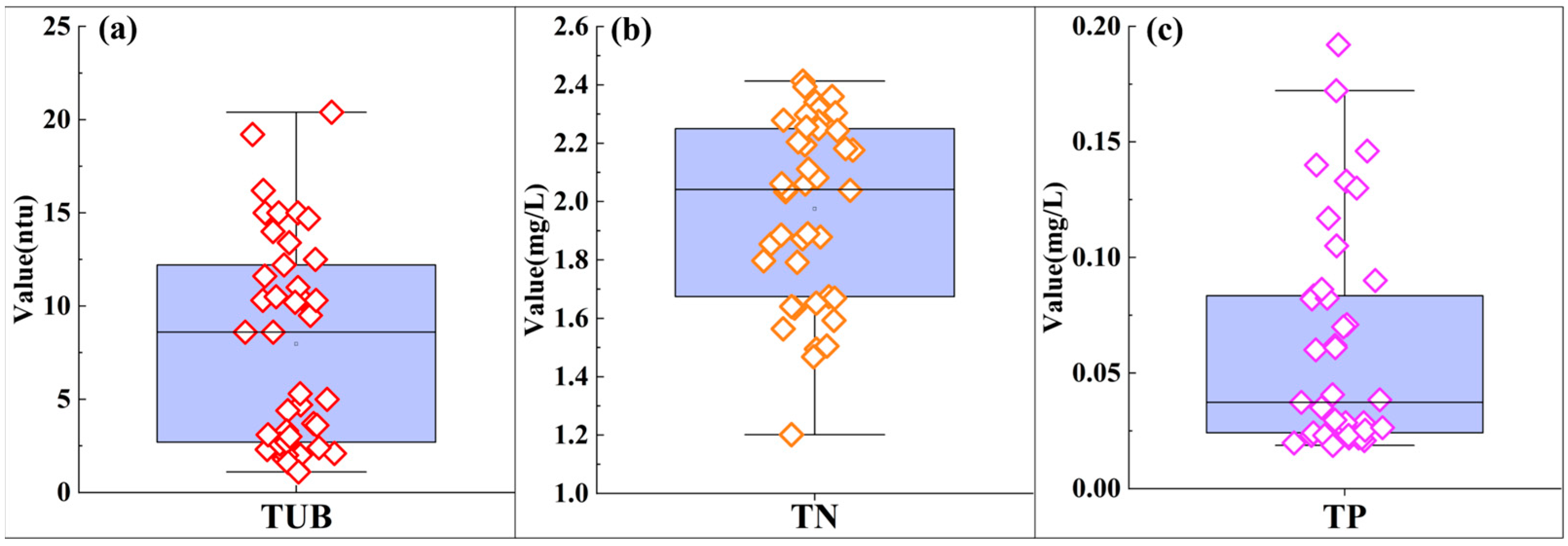
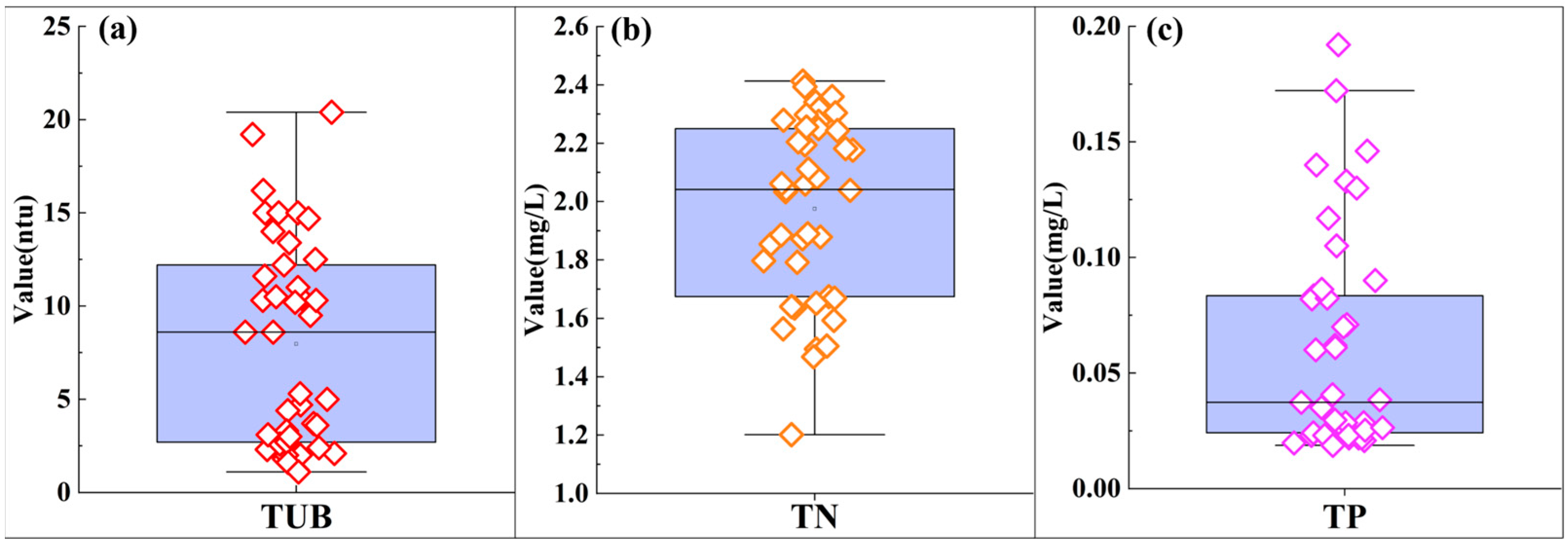
3.1. Water Quality of the Changlin River
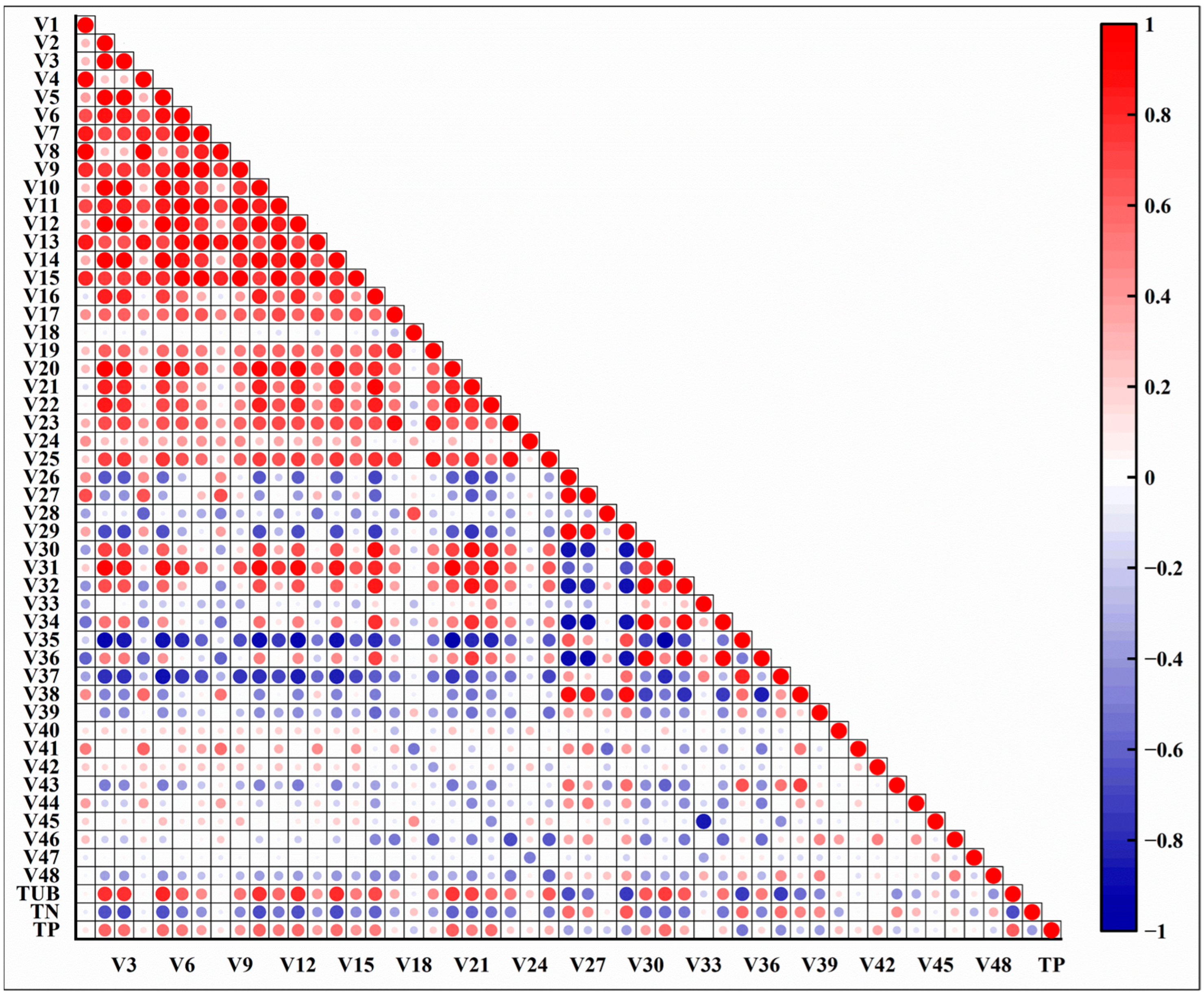
3.2. Correlations between Spectral Parameters and Model Inputs
3.3. Univariate Regression Models
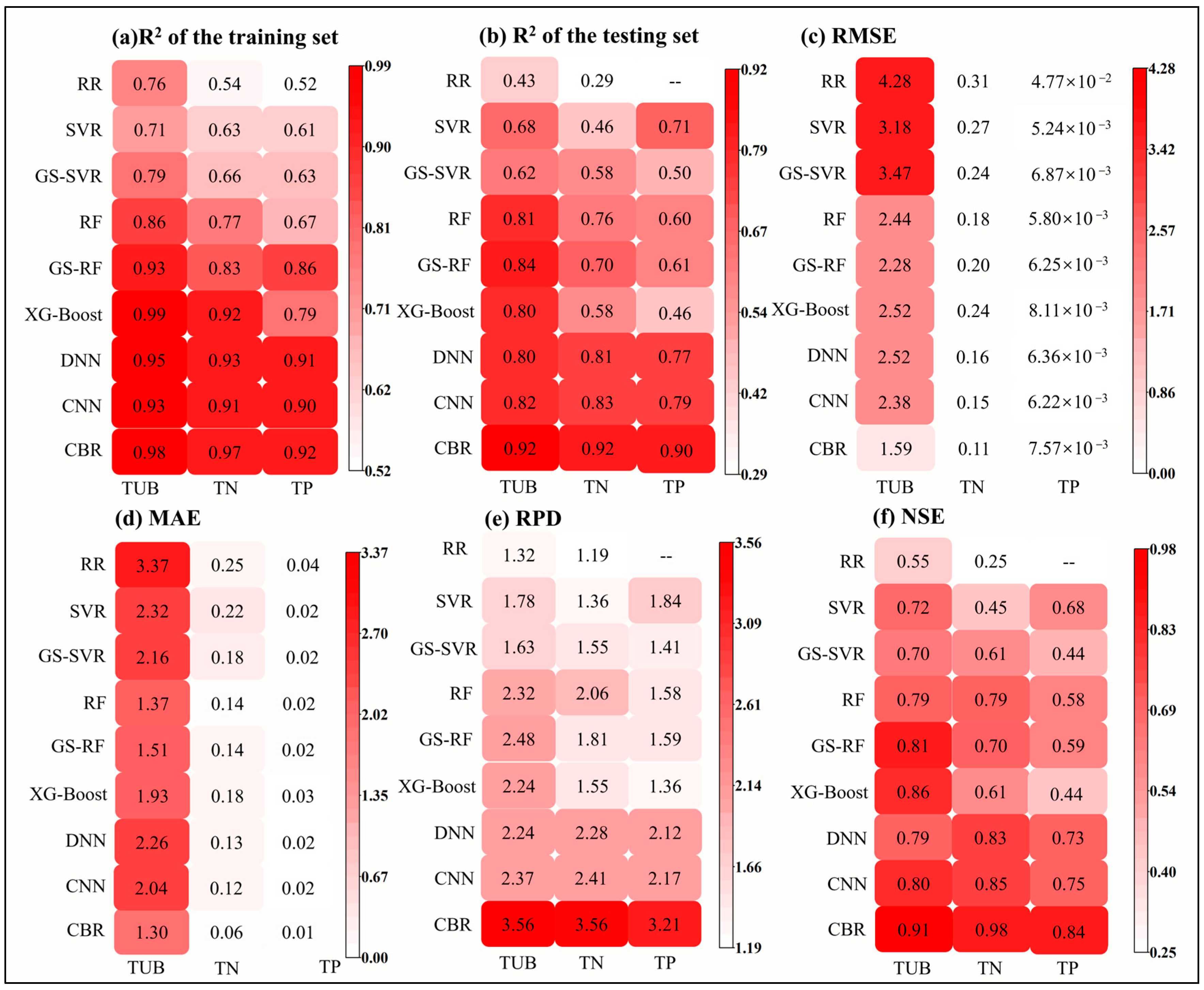
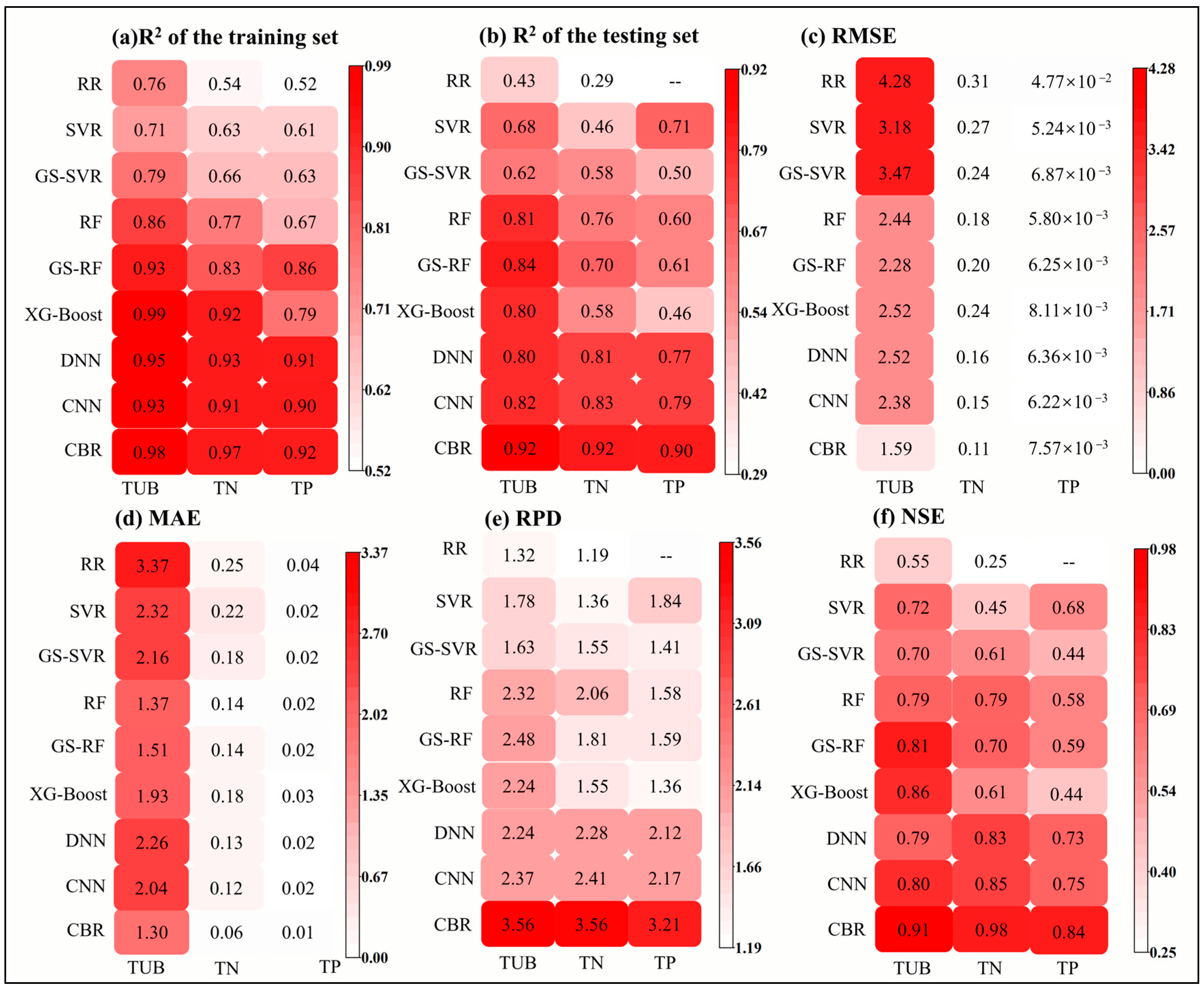
3.4. Fitness of ML Models
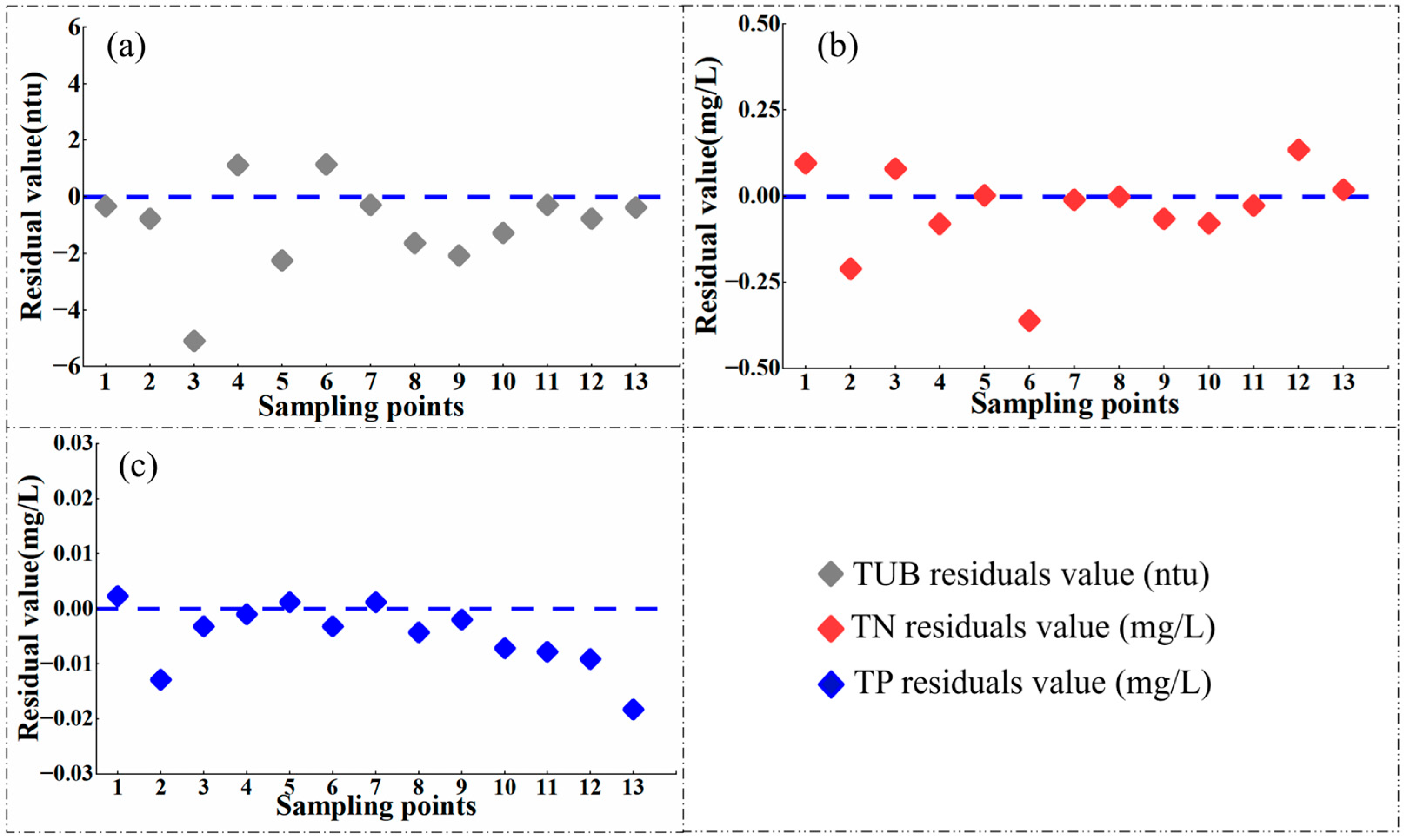
3.5. Optimal Model Validation
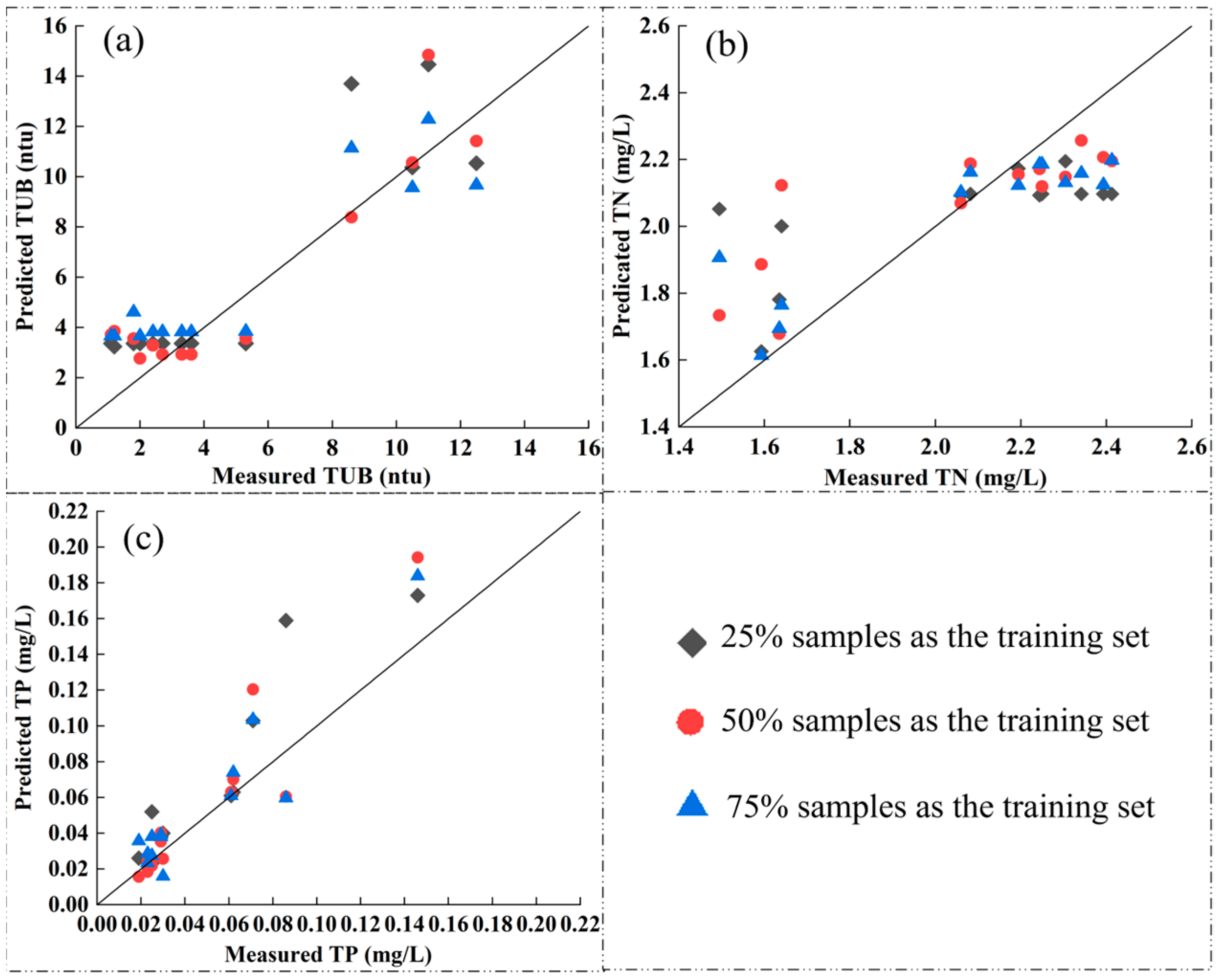
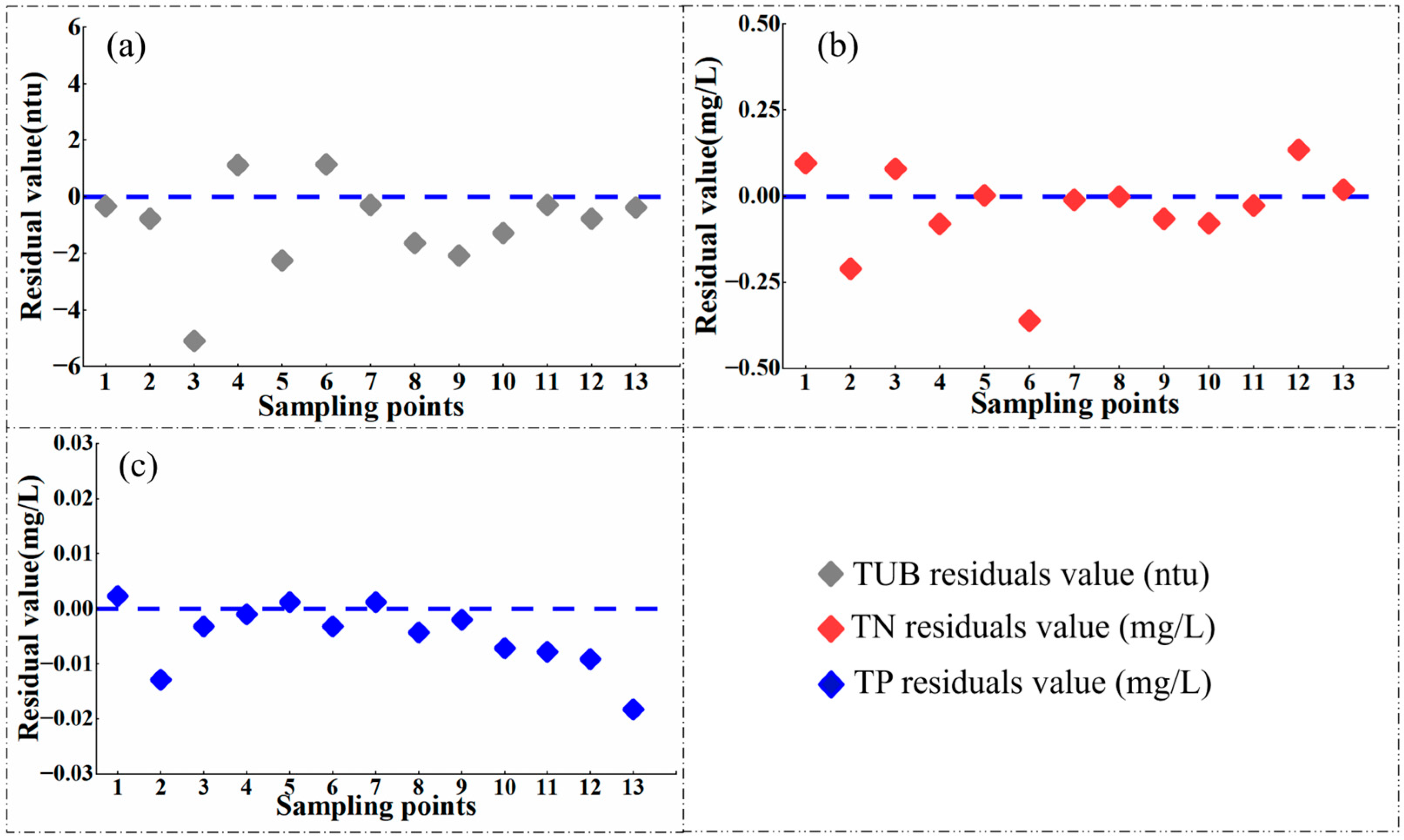
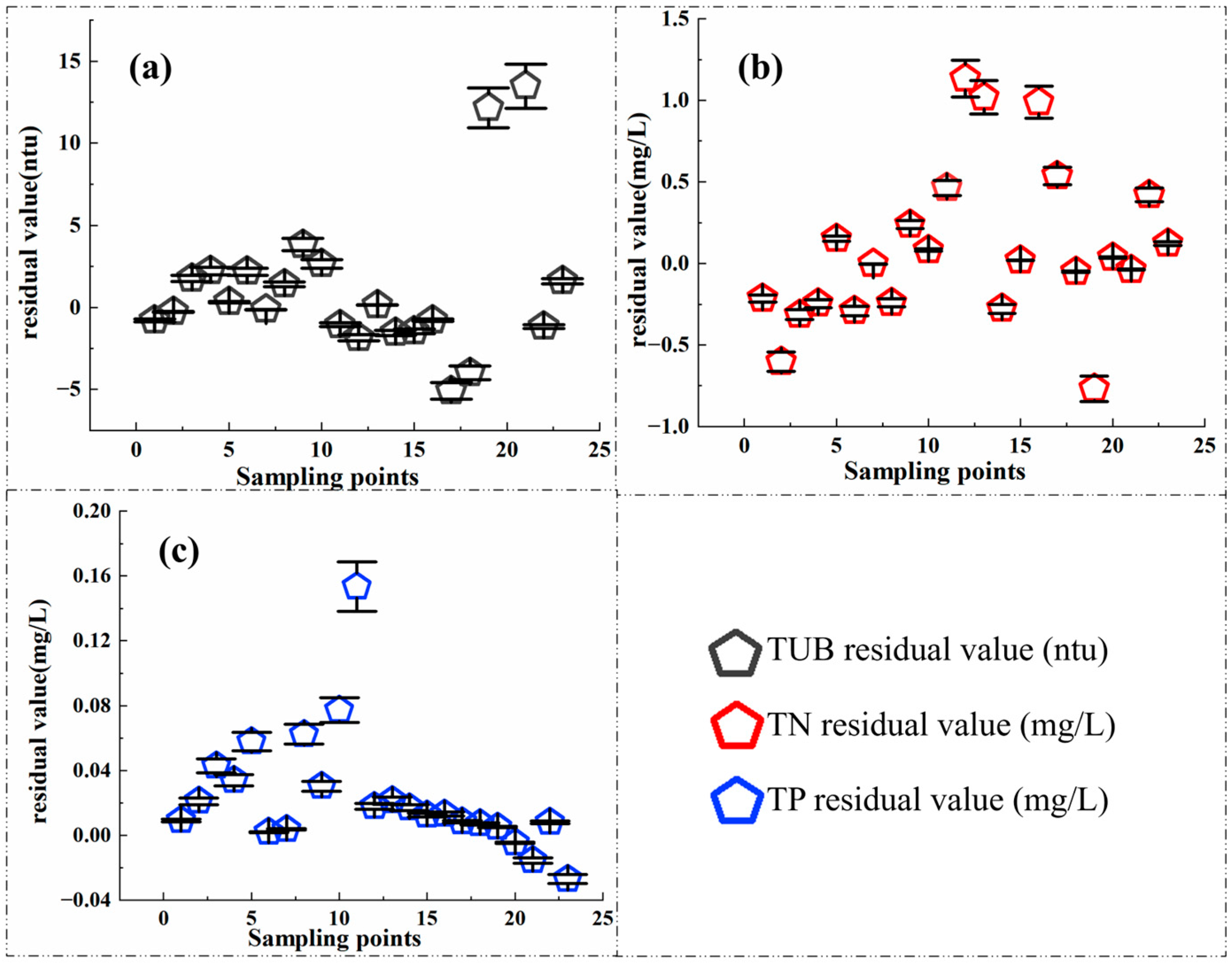
3.5.1. Stability of the ML Models
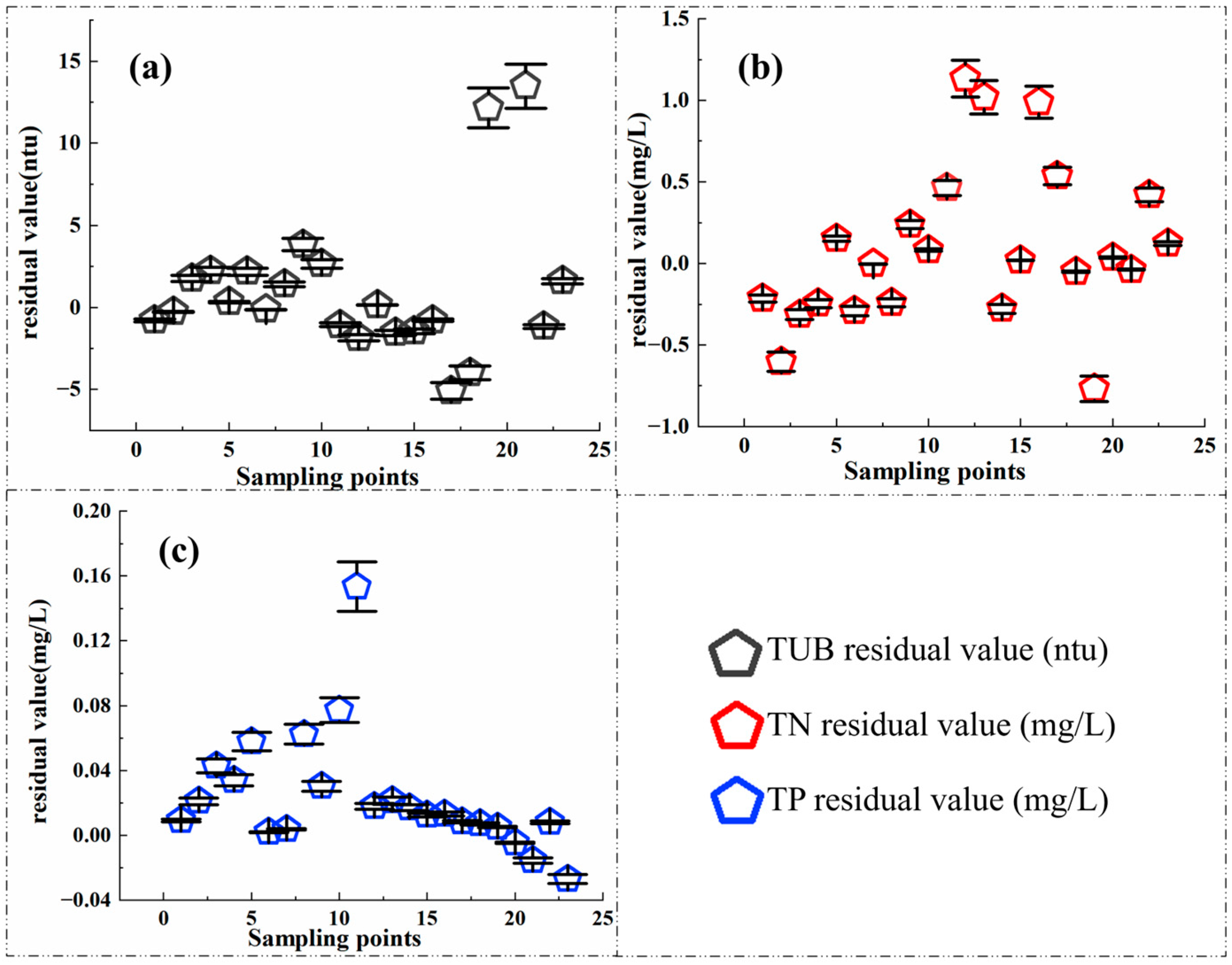
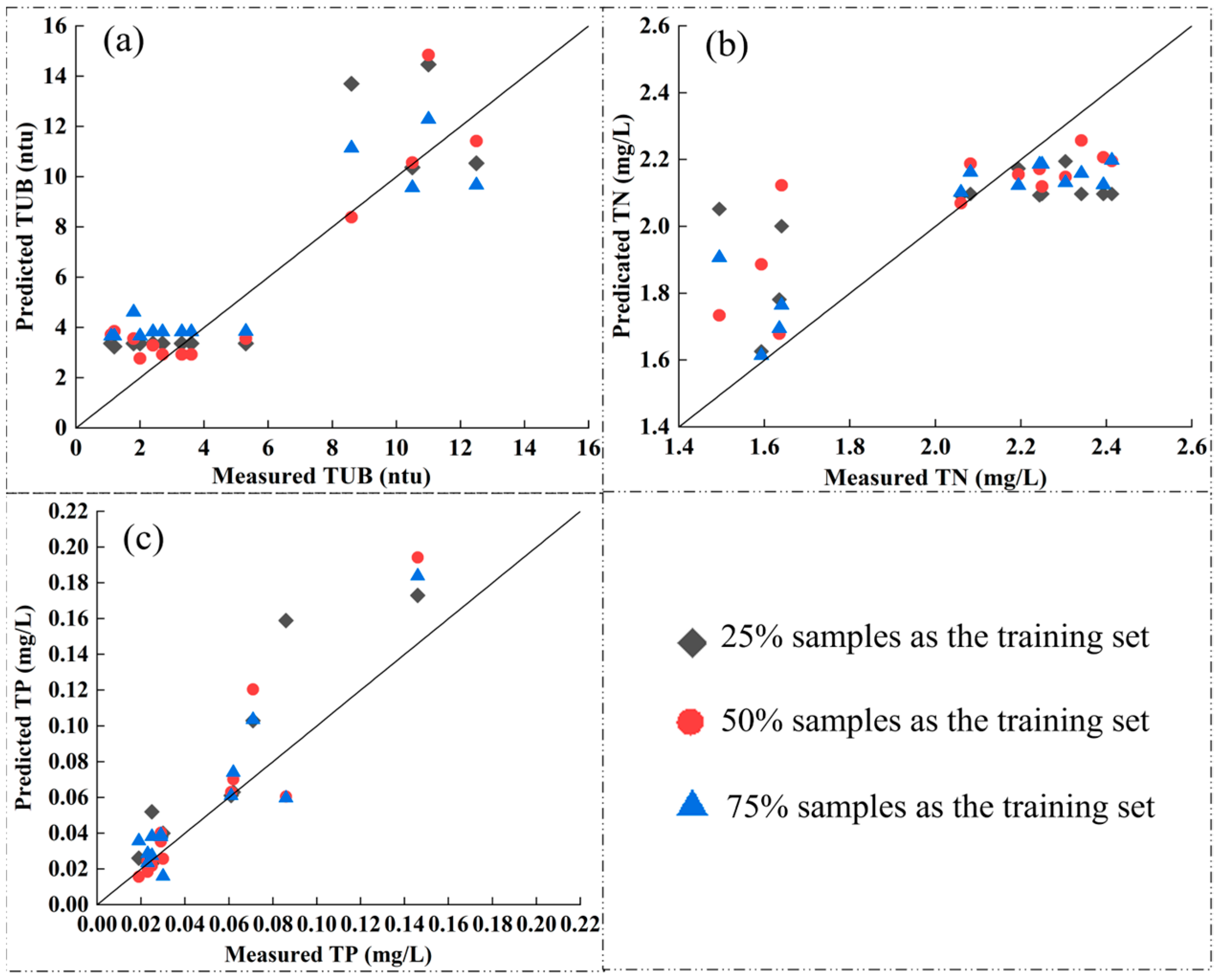
3.5.2. Verification of Model Suitability
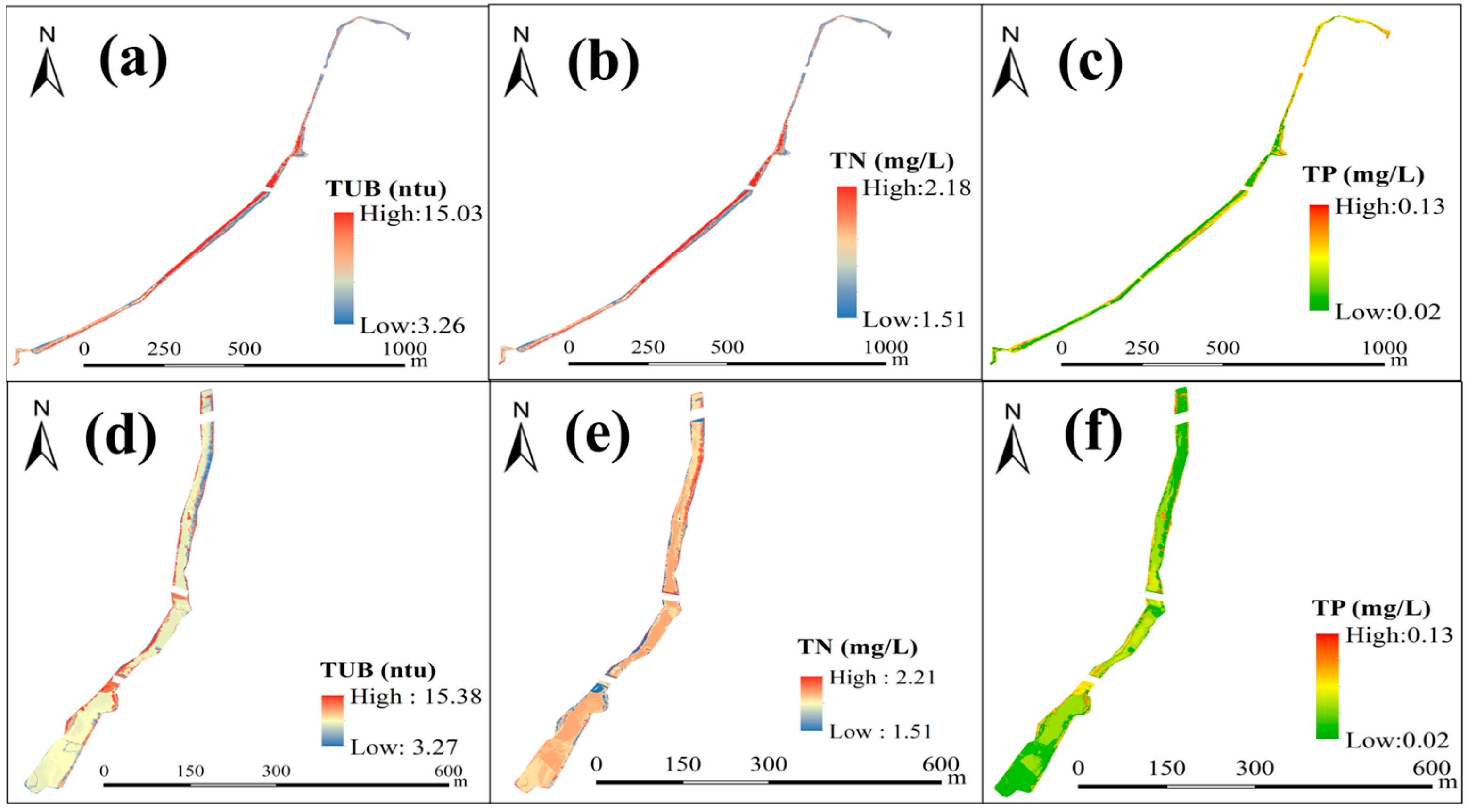
3.6. Spatial Distribution Characteristics of Water Quality Parameters
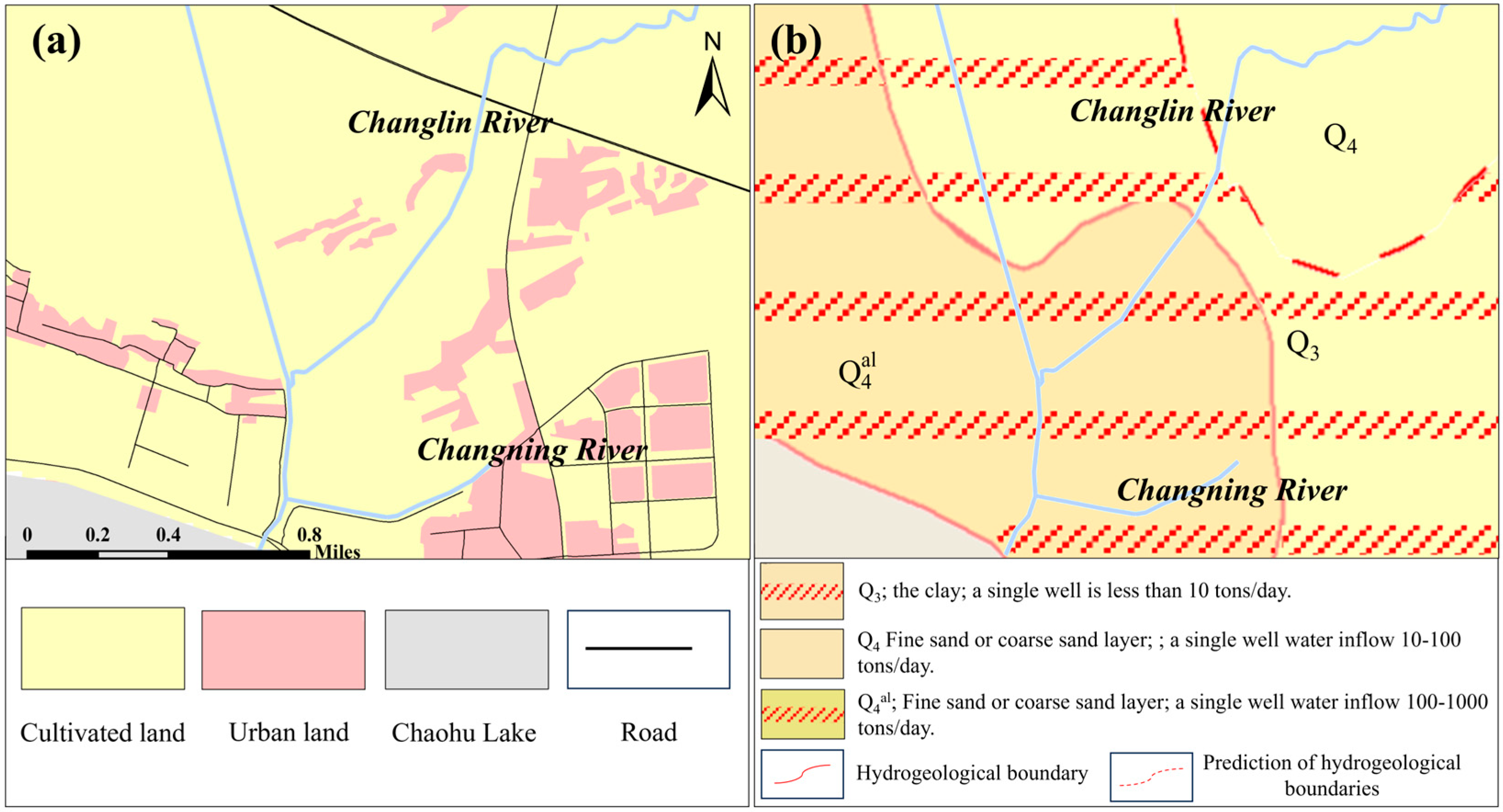
3.7. Land-Use Characteristics of the Study Area
4. Discussion
4.1. Model Performance Analysis
4.2. Comparison of Inversion Accuracy with Other Research
4.3. Implications of This Study
4.4. Limitations and Perspective
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, W.; Liu, J.; Wang, H.; Miao, D.; Shao, D.; Gu, W. Retrieval of TP Concentration from UAV Multispectral Images Using IOA-ML Models in Small Inland Waterbodies. Remote Sens. 2023, 15, 1250. [Google Scholar] [CrossRef]
- Sayers, M.J.; Bosse, K.R.; Shuchman, R.A.; Ruberg, S.A.; Fahnenstiel, G.L.; Leshkevich, G.A.; Stuart, D.G.; Johengen, T.H.; Burtner, A.M.; Palladino, D. Spatial and Temporal Variability of Inherent and Apparent Optical Properties in Western Lake Erie: Implications for Water Quality Remote Sensing. J. Great Lakes Res. 2019, 45, 490–507. [Google Scholar] [CrossRef]
- Brando, V.E.; Dekker, A.G. Satellite Hyperspectral Remote Sensing for Estimating Estuarine and Coastal Water Quality. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1378–1387. [Google Scholar]
- Alparslan, E.; Aydöner, C.; Tufekci, V.; Tüfekci, H. Water Quality Assessment at Ömerli Dam Using Remote Sensing Techniques. Environ. Monit Assess 2007, 135, 391–398. [Google Scholar] [CrossRef] [PubMed]
- Tong, X.; Xie, H.; Qiu, Y.; Zhang, H.; Song, L.; Zhang, Y.; Zhao, J. Quantitative Monitoring of Inland Water Using Remote Sensing of the Upper Reaches of the Huangpu River, China. Int. J. Remote Sens. 2010, 31, 2471–2492. [Google Scholar] [CrossRef]
- Dlamini, S.; Nhapi, I.; Gumindoga, W.; Nhiwatiwa, T.; Dube, T. Assessing the Feasibility of Integrating Remote Sensing and In-Situ Measurements in Monitoring Water Quality Status of Lake Chivero, Zimbabwe. Phys. Chem. Earth Parts A/B/C 2016, 93, 2–11. [Google Scholar] [CrossRef]
- Smith, V.H.; Tilman, G.D.; Nekola, J.C. Eutrophication: Impacts of Excess Nutrient Inputs on Freshwater, Marine, and Terrestrial Ecosystems. Environ. Pollut. 1999, 100, 179–196. [Google Scholar] [CrossRef]
- Odermatt, D.; Gitelson, A.; Brando, V.E.; Schaepman, M. Review of Constituent Retrieval in Optically Deep and Complex Waters from Satellite Imagery. Remote Sens. Environ. 2012, 118, 116–126. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring Inland Water Quality Using Remote Sensing: Potential and Limitations of Spectral Indices, Bio-Optical Simulations, Machine Learning, and Cloud Computing. Earth-Sci. Rev. 2020, 205, 103187. [Google Scholar] [CrossRef]
- Virdis, S.G.P.; Xue, W.; Winijkul, E.; Nitivattananon, V.; Punpukdee, P. Remote Sensing of Tropical Riverine Water Quality Using Sentinel-2 MSI and Field Observations. Ecol. Indic. 2022, 144, 109472. [Google Scholar] [CrossRef]
- Lu, H.; Ma, X. Hybrid Decision Tree-Based Machine Learning Models for Short-Term Water Quality Prediction. Chemosphere 2020, 249, 126169. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Zhou, Y.; He, B.; Xiao, F.; Feng, Q.; Kou, J.; Liu, H. Retrieving the Lake Trophic Level Index with Landsat-8 Image by Atmospheric Parameter and RBF: A Case Study of Lakes in Wuhan, China. Remote Sens. 2019, 11, 457. [Google Scholar] [CrossRef]
- Pyo, J.; Park, L.J.; Pachepsky, Y.; Baek, S.-S.; Kim, K.; Cho, K.H. Using Convolutional Neural Network for Predicting Cyanobacteria Concentrations in River Water. Water Res. 2020, 186, 116349. [Google Scholar] [CrossRef]
- He, Y.; Gong, Z.; Zheng, Y.; Zhang, Y. Inland Reservoir Water Quality Inversion and Eutrophication Evaluation Using BP Neural Network and Remote Sensing Imagery: A Case Study of Dashahe Reservoir. Water 2021, 13, 2844. [Google Scholar] [CrossRef]
- Hou, Y.; Zhang, A.; Lv, R.; Zhang, Y.; Ma, J.; Li, T. Machine Learning Algorithm Inversion Experiment and Pollution Analysis of Water Quality Parameters in Urban Small and Medium-Sized Rivers Based on UAV Multispectral Data. Environ. Sci Pollut Res 2023, 30, 78913–78932. [Google Scholar] [CrossRef] [PubMed]
- Huo, A.; Zhang, J.; Qiao, C.; Li, C.; Xie, J.; Wang, J.; Zhang, X. Multispectral Remote Sensing Inversion for City Landscape Water Eutrophication Based on Genetic Algorithm-Support Vector Machine. Water Qual. Res. J. 2014, 49, 285–293. [Google Scholar] [CrossRef]
- Shen, L.Q.; Amatulli, G.; Sethi, T.; Raymond, P.; Domisch, S. Estimating Nitrogen and Phosphorus Concentrations in Streams and Rivers, within a Machine Learning Framework. Sci. Data 2020, 7, 161. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Huang, M.; Wang, R. Numerical Simulation of Donghu Lake Hydrodynamics and Water Quality Based on Remote Sensing and MIKE 21. Int. J. Geo-Inf. 2020, 9, 94. [Google Scholar] [CrossRef]
- Tan, Z.; Ren, J.; Li, S.; Li, W.; Zhang, R.; Sun, T. Inversion of Nutrient Concentrations Using Machine Learning and Influencing Factors in Minjiang River. Water 2023, 15, 1398. [Google Scholar] [CrossRef]
- Xiaojuan, L.; Mutao, H.; Jianbao, L. Remote Sensing Inversion of Lake Water Quality Parameters Based on Ensemble Modelling. E3S Web Conf. 2020, 143, 02007. [Google Scholar] [CrossRef]
- Wang, L.; Yue, X.; Wang, H.; Ling, K.; Liu, Y.; Wang, J.; Hong, J.; Pen, W.; Song, H. Dynamic Inversion of Inland Aquaculture Water Quality Based on UAVs-WSN Spectral Analysis. Remote Sens. 2020, 12, 402. [Google Scholar] [CrossRef]
- Sharafati, A.; Asadollah, S.B.H.S.; Hosseinzadeh, M. The Potential of New Ensemble Machine Learning Models for Effluent Quality Parameters Prediction and Related Uncertainty. Process Saf. Environ. Prot. 2020, 140, 68–78. [Google Scholar] [CrossRef]
- Xiao, Y.; Guo, Y.; Yin, G.; Zhang, X.; Shi, Y.; Hao, F.; Fu, Y. UAV Multispectral Image-Based Urban River Water Quality Monitoring Using Stacked Ensemble Machine Learning Algorithms—A Case Study of the Zhanghe River, China. Remote Sens. 2022, 14, 3272. [Google Scholar] [CrossRef]
- Li, S.; Song, K.; Wang, S.; Liu, G.; Wen, Z.; Shang, Y.; Lyu, L.; Chen, F.; Xu, S.; Tao, H.; et al. Quantification of Chlorophyll-a in Typical Lakes across China Using Sentinel-2 MSI Imagery with Machine Learning Algorithm. Sci. Total Environ. 2021, 778, 146271. [Google Scholar] [CrossRef] [PubMed]
- Tran, M.D.; Vantrepotte, V.; Loisel, H.; Oliveira, E.N.; Tran, K.T.; Jorge, D.; Mériaux, X.; Paranhos, R. Band Ratios Combination for Estimating Chlorophyll-a from Sentinel-2 and Sentinel-3 in Coastal Waters. Remote Sens. 2023, 15, 1653. [Google Scholar] [CrossRef]
- Yang, H.; Kong, J.; Hu, H.; Du, Y.; Gao, M.; Chen, F. A Review of Remote Sensing for Water Quality Retrieval: Progress and Challenges. Remote Sens. 2022, 14, 1770. [Google Scholar] [CrossRef]
- Shi, K.; Wang, P.; Yin, H.; Lang, Q.; Wang, H.; Chen, G. Dissolved Oxygen Inversion Based on Himawari-8 Imagery and Machine Learning: A Case Study of Lake Chaohu. Water 2023, 15, 3081. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Peng, B.; Fan, K.; Tong, L. Remote Sensing Inversion of Water Quality Parameters in Longquan Lake Based on PSO-SVR Algorithm. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 9268–9271. [Google Scholar]
- Fu, B.; Lao, Z.; Liang, Y.; Sun, J.; He, X.; Deng, T.; He, W.; Fan, D.; Gao, E.; Hou, Q. Evaluating Optically and Non-Optically Active Water Quality and Its Response Relationship to Hydro-Meteorology Using Multi-Source Data in Poyang Lake, China. Ecol. Indic. 2022, 145, 109675. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, F.; Ding, J. Evaluation of Water Quality Based on a Machine Learning Algorithm and Water Quality Index for the Ebinur Lake Watershed, China. Sci. Rep. 2017, 7, 12858. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, J.; Meng, H.; Lai, Y.; Xu, M. Remote Sensing Inversion of Water Quality Parameters in the Yellow River Delta. Ecol. Indic. 2023, 155, 110914. [Google Scholar] [CrossRef]
- Ding, H.; Li, R.R.; Lin, H.; Wang, X. Monitoring and Evaluation on Water Quality of Hun River Based on Landsat Satellite Data. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016; IEEE: Shanghai, China, 2016; pp. 1532–1537. [Google Scholar]
- Qian, J.; Liu, H.; Qian, L.; Bauer, J.; Xue, X.; Yu, G.; He, Q.; Zhou, Q.; Bi, Y.; Norra, S. Water Quality Monitoring and Assessment Based on Cruise Monitoring, Remote Sensing, and Deep Learning: A Case Study of Qingcaosha Reservoir. Front. Environ. Sci. 2022, 10, 979133. [Google Scholar] [CrossRef]
- Qun’ou, J.; Lidan, X.; Siyang, S.; Meilin, W.; Huijie, X. Retrieval Model for Total Nitrogen Concentration Based on UAV Hyper Spectral Remote Sensing Data and Machine Learning Algorithms—A Case Study in the Miyun Reservoir, China. Ecol. Indic. 2021, 124, 107356. [Google Scholar] [CrossRef]
- Chen, B.; Mu, X.; Chen, P.; Wang, B.; Choi, J.; Park, H.; Xu, S.; Wu, Y.; Yang, H. Machine Learning-Based Inversion of Water Quality Parameters in Typical Reach of the Urban River by UAV Multispectral Data. Ecol. Indic. 2021, 133, 108434. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.; Song, K.; Liu, G.; Wen, Z.; Fang, C.; Shang, Y.; Lyu, L.; Zhang, L. Sentinel-3 OLCI Observations of Chinese Lake Turbidity Using Machine Learning Algorithms. J. Hydrol. 2023, 622, 129668. [Google Scholar]
- Chen Yuli, S.F. Influence of Suspended Particulate Matter on Chlorophyll\|a Retrieval Algorithms in Yangtze River Estuary and Adjacent Turbid Waters. Remote Sens. Technol. Appl. 2016, 31, 126–133. [Google Scholar]
- Dehkordi, A.T.; Javad Valadan Zoej, M.; Chegoonian, A.M.; Mehran, A.; Jafari, M. Improved Water Chlorophyll-A Retrieval Method Based On Mixture Density Networks Using In-Situ Hyperspectral Remote Sensing Data. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16 July 2023; IEEE: Pasadena, CA, USA, 2023; pp. 3745–3748. [Google Scholar]
- Dingtian, Y.; Delu, P.; Xiaoyu, Z.; Xiaofeng, Z.; Xianqiang, H.; Shujing, L. Retrieval of Chlorophyll a and Suspended Solid Concentrations by Hyperspectral Remote Sensing in Taihu Lake, China. Chin. J. Ocean. Limnol. 2006, 24, 428–434. [Google Scholar] [CrossRef]
- Ha, N.; Koike, K.; Nhuan, M. Improved Accuracy of Chlorophyll-a Concentration Estimates from MODIS Imagery Using a Two-Band Ratio Algorithm and Geostatistics: As Applied to the Monitoring of Eutrophication Processes over Tien Yen Bay (Northern Vietnam). Remote Sens. 2013, 6, 421–442. [Google Scholar]
- Na, Z.-L.; Yao, H.-M.; Chen, H.-Q.; Wei, Y.-M.; Wen, K.; Huang, Y.; Liao, P.-R. Retrieval and Evaluation of Chlorophyll-A Spatiotemporal Variability Using GF-1 Imagery: Case Study of Qinzhou Bay, China. Sustainability 2021, 13, 4649. [Google Scholar] [CrossRef]
- Su, T.-C. A Study of a Matching Pixel by Pixel (MPP) Algorithm to Establish an Empirical Model of Water Quality Mapping, as Based on Unmanned Aerial Vehicle (UAV) Images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Hoerl, A.E.; Kennard, R.W. Ridge Regression: Applications to Nonorthogonal Problems. Technometrics 1970, 12, 69–82. [Google Scholar] [CrossRef]
- McDonald, G.C. Ridge Regression. WIREs Comput. Stat. 2009, 1, 93–100. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Lei, C.; Deng, J.; Cao, K.; Ma, L.; Xiao, Y.; Ren, L. A Random Forest Approach for Predicting Coal Spontaneous Combustion. Fuel 2018, 223, 63–73. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Mutanga, O.; Adam, E.; Cho, M.A. High Density Biomass Estimation for Wetland Vegetation Using WorldView-2 Imagery and Random Forest Regression Algorithm. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 399–406. [Google Scholar]
- Smola, A.J.; Schölkopf, B. A Tutorial on Support Vector Regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]
- Leong, W.C.; Bahadori, A.; Zhang, J.; Ahmad, Z. Prediction of Water Quality Index (WQI) Using Support Vector Machine (SVM) and Least Squaresupport Vector Machine (LS-SVM). Int. J. River Basin Manag. 2021, 19, 149–156. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; ACM: San Francisco, CA, USA, 2016; pp. 785–794. [Google Scholar]
- Dong, W.; Huang, Y.; Lehane, B.; Ma, G. XGBoost Algorithm-Based Prediction of Concrete Electrical Resistivity for Structural Health Monitoring. Autom. Constr. 2020, 114, 103155. [Google Scholar] [CrossRef]
- Asghar, S.; Gilanie, G.; Saddique, M.; Ullah, H.; Mohamed, H.G.; Abbasi, I.A.; Abbas, M. Water Classification Using Convolutional Neural Network. IEEE Access 2023, 11, 78601–78612. [Google Scholar] [CrossRef]
- Wei, Z.; Wei, L.; Yang, H.; Wang, Z.; Xiao, Z.; Li, Z.; Yang, Y.; Xu, G. Water Quality Grade Identification for Lakes in Middle Reaches of Yangtze River Using Landsat-8 Data with Deep Neural Networks (DNN) Model. Remote Sens. 2022, 14, 6238. [Google Scholar] [CrossRef]
- Hancock, J.T.; Khoshgoftaar, T.M. CatBoost for Big Data: An Interdisciplinary Review. J. Big Data 2020, 7, 94. [Google Scholar] [CrossRef] [PubMed]
- Jabeur, S.B.; Gharib, C.; Mefteh-Wali, S.; Arfi, W.B. CatBoost Model and Artificial Intelligence Techniques for Corporate Failure Prediction. Technol. Forecast. Soc. Change 2021, 166, 120658. [Google Scholar] [CrossRef]
- Lamontagne, J.R.; Barber, C.A.; Vogel, R.M. Improved Estimators of Model Performance Efficiency for Skewed Hydrologic Data. Water Resour. Res. 2020, 56, e2020WR027101. [Google Scholar] [CrossRef]
- Chen, P.; Wang, B.; Wu, Y.; Wang, Q.; Huang, Z.; Wang, C. Urban River Water Quality Monitoring Based on Self-Optimizing Machine Learning Method Using Multi-Source Remote Sensing Data. Ecol. Indic. 2023, 146, 109750. [Google Scholar] [CrossRef]
- Chen, K.; Chen, H.; Zhou, C.; Huang, Y.; Qi, X.; Shen, R.; Liu, F.; Zuo, M.; Zou, X.; Wang, J.; et al. Comparative analysis of surface water quality prediction performance and identification of key water parameters using different machine learning models based on big data. Water Res 2020, 171, 115454. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Wu, X.; Hao, H.; He, Z. Mechanisms and Assessment of Water Eutrophication. J. Zhejiang Univ. Sci. B 2008, 9, 197–209. [Google Scholar] [CrossRef]
- Cózar, A. Light Control of the Productivity of Aquatic Ecosystems. WIT Trans. Ecol. Environ. 2005, 81, 9. [Google Scholar]
- Dong, G.; Hu, Z.; Liu, X.; Fu, Y.; Zhang, W. Spatio-Temporal Variation of Total Nitrogen and Ammonia Nitrogen in the Water Source of the Middle Route of the South-To-North Water Diversion Project. Water 2020, 12, 2615. [Google Scholar] [CrossRef]
- Ke Wang, E.; Wang, F.; Sun, R.; Liu, X. Harbin Institute of Technology, Shenzhen, 518055, China. A New Privacy Attack Network for Remote Sensing Images Classification with Small Training Samples. Math. Biosci. Eng. 2019, 16, 4456–4476. [Google Scholar] [CrossRef]
- Tong, S.T.Y.; Chen, W. Modeling the Relationship between Land Use and Surface Water Quality. J. Environ. Manag. 2002, 66, 377–393. [Google Scholar] [CrossRef]
- Wang, B. Correlation Analysis between Ammonia Nitrogen and Total Nitrogen in Wastewater. Environ. Sci. Manag. 2015, 40, 107–109. [Google Scholar]
- Galbraith, L.M.; Burns, C.W. Linking Land-Use, Water Body Type and Water Quality in Southern New Zealand. Landsc. Ecol. 2007, 22, 231–241. [Google Scholar] [CrossRef]
- Liu, Q.; Wu, T.Y.; Pu, L.; Sun, J. Comparison of Fertilizer Use Efficiency in Grain Production between Developing Countries and Developed Countries. J. Sci. Food Agric. 2022, 102, 2404–2412. [Google Scholar] [CrossRef] [PubMed]
- Açıkkar, M.; Altunkol, Y. A Novel Hybrid PSO- and GS-Based Hyperparameter Optimization Algorithm for Support Vector Regression. Neural Comput. Appl. 2023, 35, 19961–19977. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Y.; Huang, H. GS-SVR: Analysis and Prediction of Henan Province Grain Production Using Support Vector Regression. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: Kunming, China, 2021; pp. 2264–2268. [Google Scholar]
- Zhong, S.; Guan, X. Count-Based Morgan Fingerprint: A More Efficient and Interpretable Molecular Representation in Developing Machine Learning-Based Predictive Regression Models for Water Contaminants’ Activities and Properties. Environ. Sci. Technol. 2023, 57, 18193–18202. [Google Scholar] [CrossRef]
- El Bilali, A.; Lamane, H.; Taleb, A.; Nafii, A. A Framework Based on Multivariate Distribution-Based Virtual Sample Generation and DNN for Predicting Water Quality with Small Data. J. Clean. Prod. 2022, 368, 133227. [Google Scholar] [CrossRef]
- Lu, Q.; Si, W.; Wei, L.; Li, Z.; Xia, Z.; Ye, S.; Xia, Y. Retrieval of Water Quality from UAV-Borne Hyperspectral Imagery: A Comparative Study of Machine Learning Algorithms. Remote Sens. 2021, 13, 3928. [Google Scholar] [CrossRef]
- Zhu, X.; Wen, Y.; Li, X.; Yan, F.; Zhao, S. Remote Sensing Inversion of Typical Water Quality Parameters of a Complex River Network: A Case Study of Qidong’s Rivers. Sustainability 2023, 15, 6948. [Google Scholar] [CrossRef]
- Huangfu, K.; Li, J.; Zhang, X.; Zhang, J.; Cui, H.; Sun, Q. Remote Estimation of Water Quality Parameters of Medium- and Small-Sized Inland Rivers Using Sentinel-2 Imagery. Water 2020, 12, 3124. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, Y.; Yu, C.; Zhang, Z. Multispectral Remote Sensing for Estimating Water Quality Parameters: A Comparative Study of Inversion Methods Using Unmanned Aerial Vehicles (UAVs). Sustainability 2023, 15, 10298. [Google Scholar] [CrossRef]
- Ni, J.; Shen, K.; Chen, Y.; Yang, S.X. An Improved SSD-Like Deep Network-Based Object Detection Method for Indoor Scenes. IEEE Trans. Instrum. Meas. 2023, 72, 1–15. [Google Scholar] [CrossRef]
- Zhu, N.; Ji, X.; Tan, J.; Jiang, Y.; Guo, Y. Prediction of Dissolved Oxygen Concentration in Aquatic Systems Based on Transfer Learning. Comput. Electron. Agric. 2021, 180, 105888. [Google Scholar] [CrossRef]
- Chen, J.; Huang, J.; Zhang, X.; Chen, J.; Chen, X. Monitoring Total Suspended Solids Concentration in Poyang Lake via Machine Learning and Landsat Images. J. Hydrol. Reg. Stud. 2023, 49, 101499. [Google Scholar] [CrossRef]
- Ni, J.; Liu, R.; Li, Y.; Tang, G.; Shi, P. An Improved Transfer Learning Model for Cyanobacterial Bloom Concentration Prediction. Water 2022, 14, 1300. [Google Scholar] [CrossRef]
- Li, J.; Liu, C.; Lu, X.; Wu, B. CME-YOLOv5: An Efficient Object Detection Network for Densely Spaced Fish and Small Targets. Water 2022, 14, 2412. [Google Scholar] [CrossRef]
- Granata, F.; Di Nunno, F.; Modoni, G. Hybrid Machine Learning Models for Soil Saturated Conductivity Prediction. Water 2022, 14, 1729. [Google Scholar] [CrossRef]
- Rocha, A.D.; Groen, T.A.; Skidmore, A.K.; Darvishzadeh, R.; Willemen, L. The Naïve Overfitting Index Selection (NOIS): A New Method to Optimize Model Complexity for Hyperspectral Data. ISPRS J. Photogramm. Remote Sens. 2017, 133, 61–74. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Quality Parameter | I | II | III | IV | V |
|---|---|---|---|---|---|
| TN≤ | 0.2 | 0.5 | 1.0 | 1.5 | 2.0 |
| TP≤ | 0.02 | 0.1 | 0.2 | 0.3 | 0.4 |
| Parameter | Index | Modeling Formula | Training Set | Test Set | |||
|---|---|---|---|---|---|---|---|
| R2 | R2 | RMSE | MAE | RPD | |||
| TUB (ntu) | V3 | y = −7.2 × 105X3 + 711X − 12.2 | 0.74 | 0.79 | 2.59 | 1.83 | 2.19 |
| TN (mg/L) | V3 | y = 1410X3 − 28.6X + 2.9 | 0.55 | 0.14 | 0.29 | 0.24 | 1.08 |
| TP (mg/L) | V10 | y = −34X3 + 16X2 − 1.6X + 0.1 | 0.52 | 0.36 | 0.02 | 0.02 | 1.25 |
| Sample Size | Evaluation Index | TUB | TN | TP |
|---|---|---|---|---|
| 25% | R2 | 0.70 | 0.43 | 0.49 |
| RMSE | 4.68 | 0.06 | 0.03 | |
| MAE | 1.67 | 0.19 | 0.01 | |
| RPD | 1.82 | 1.33 | 1.41 | |
| 50% | R2 | 0.72 | 0.61 | 0.65 |
| RMSE | 4.29 | 0.04 | 0.02 | |
| MAE | 1.68 | 0.16 | 0.01 | |
| RPD | 1.90 | 1.61 | 1.68 | |
| 75% | R2 | 0.77 | 0.71 | 0.74 |
| RMSE | 3.52 | 0.03 | 0.02 | |
| MAE | 1.53 | 0.14 | 0.01 | |
| RPD | 2.09 | 1.86 | 1.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Yao, K.; Zhu, B.; Gao, Z.; Xu, J.; Li, Y.; Hu, Y.; Lin, F.; Zhang, X. Water Quality Inversion of a Typical Rural Small River in Southeastern China Based on UAV Multispectral Imagery: A Comparison of Multiple Machine Learning Algorithms. Water 2024, 16, 553. https://doi.org/10.3390/w16040553
Chen Y, Yao K, Zhu B, Gao Z, Xu J, Li Y, Hu Y, Lin F, Zhang X. Water Quality Inversion of a Typical Rural Small River in Southeastern China Based on UAV Multispectral Imagery: A Comparison of Multiple Machine Learning Algorithms. Water. 2024; 16(4):553. https://doi.org/10.3390/w16040553
Chicago/Turabian StyleChen, Yujie, Ke Yao, Beibei Zhu, Zihao Gao, Jie Xu, Yucheng Li, Yimin Hu, Fei Lin, and Xuesheng Zhang. 2024. "Water Quality Inversion of a Typical Rural Small River in Southeastern China Based on UAV Multispectral Imagery: A Comparison of Multiple Machine Learning Algorithms" Water 16, no. 4: 553. https://doi.org/10.3390/w16040553
APA StyleChen, Y., Yao, K., Zhu, B., Gao, Z., Xu, J., Li, Y., Hu, Y., Lin, F., & Zhang, X. (2024). Water Quality Inversion of a Typical Rural Small River in Southeastern China Based on UAV Multispectral Imagery: A Comparison of Multiple Machine Learning Algorithms. Water, 16(4), 553. https://doi.org/10.3390/w16040553