
Complementary Analysis and Performance Improvement of a Hydro-Wind Hybrid Power System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Hydro–Wind Hybrid Power Model
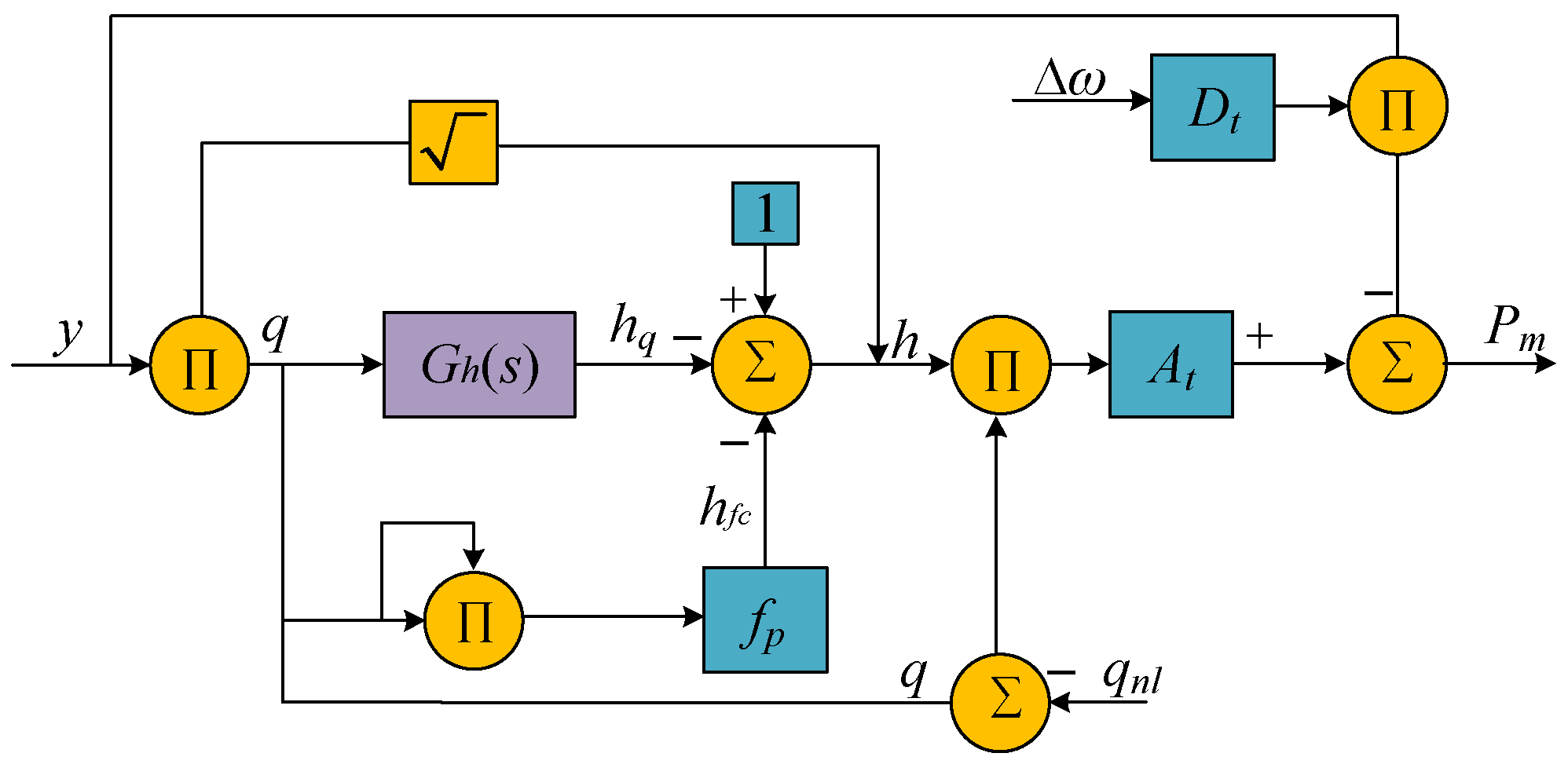
2.1. Hydropower System
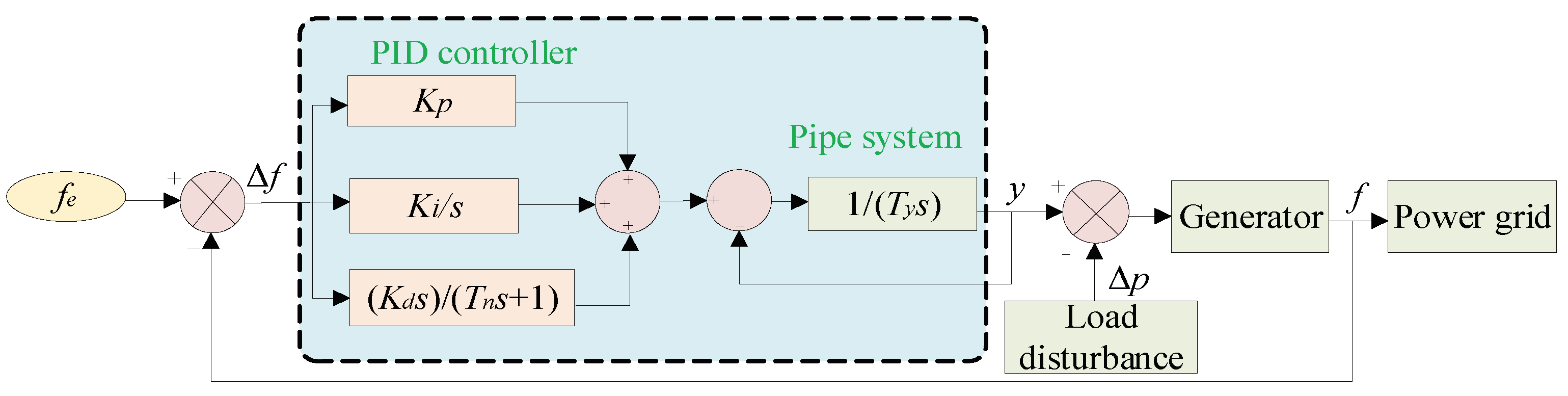
2.2. Model of Control System
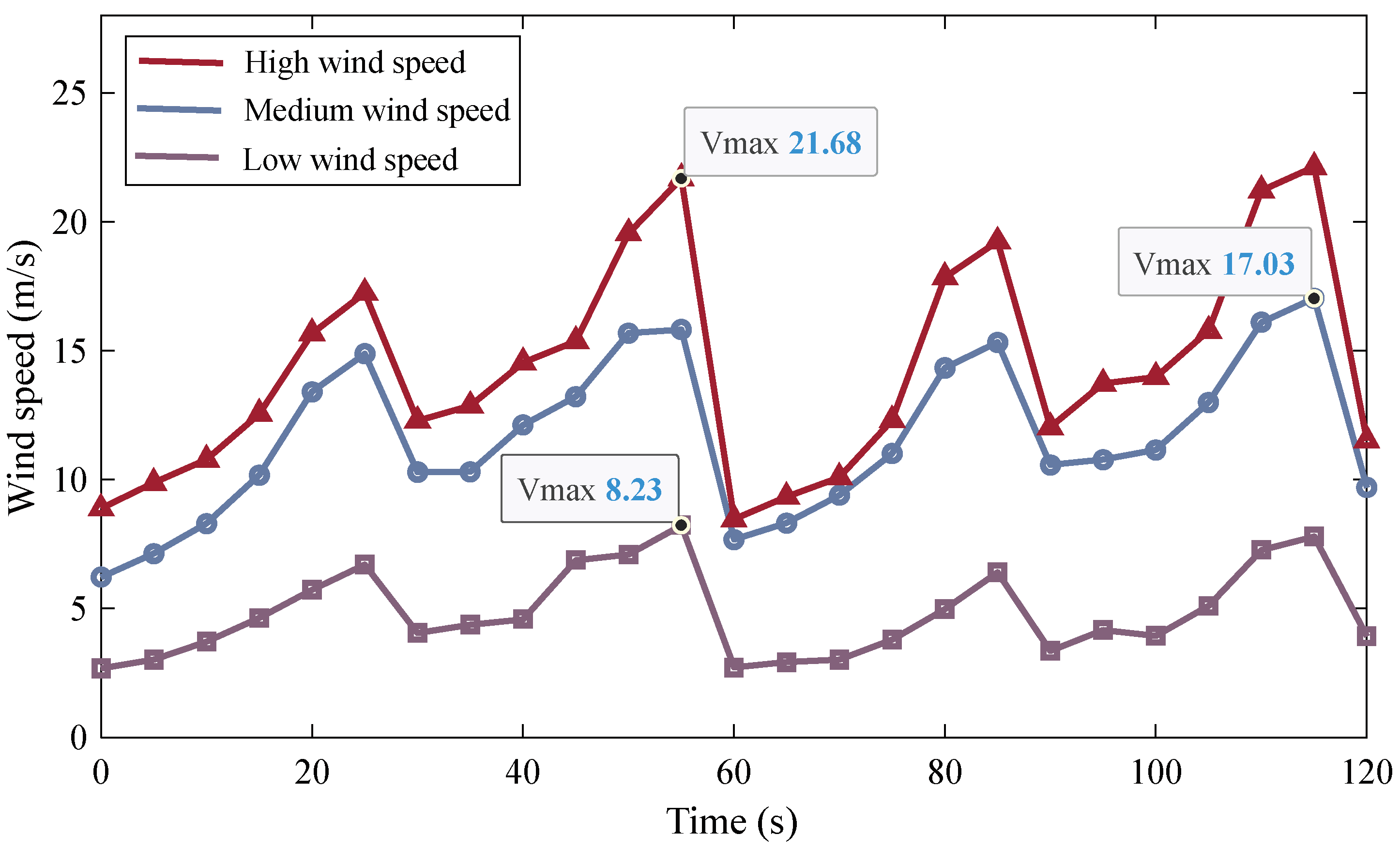
2.3. Wind Power System
2.4. Model of Hybrid System
3. Methodology
4. Complementary Analysis
5. Impact of Parameter Setting on Complementary Performances
6. Conclusions and Discussion
- Complementary characteristics: The utilization rate of the installed capacity for a hydropower generation unit approaches 95% under the low wind speed operating scenario, although the total power from the hybrid system is far below the power demand. As a result, there is little capacity space for improvement under the low wind speed in comparison with the operating scenarios in both the medium and high wind speeds.
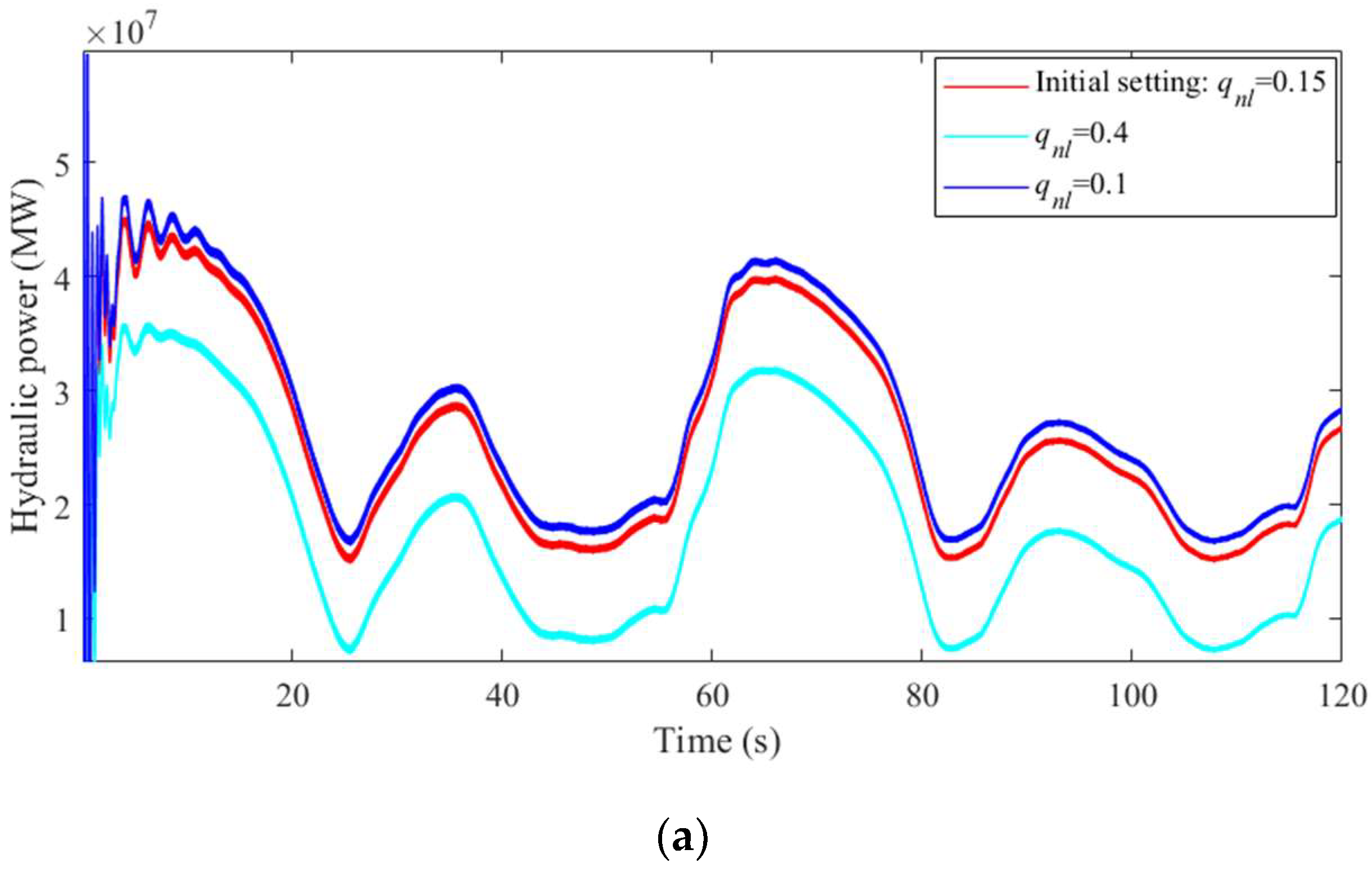
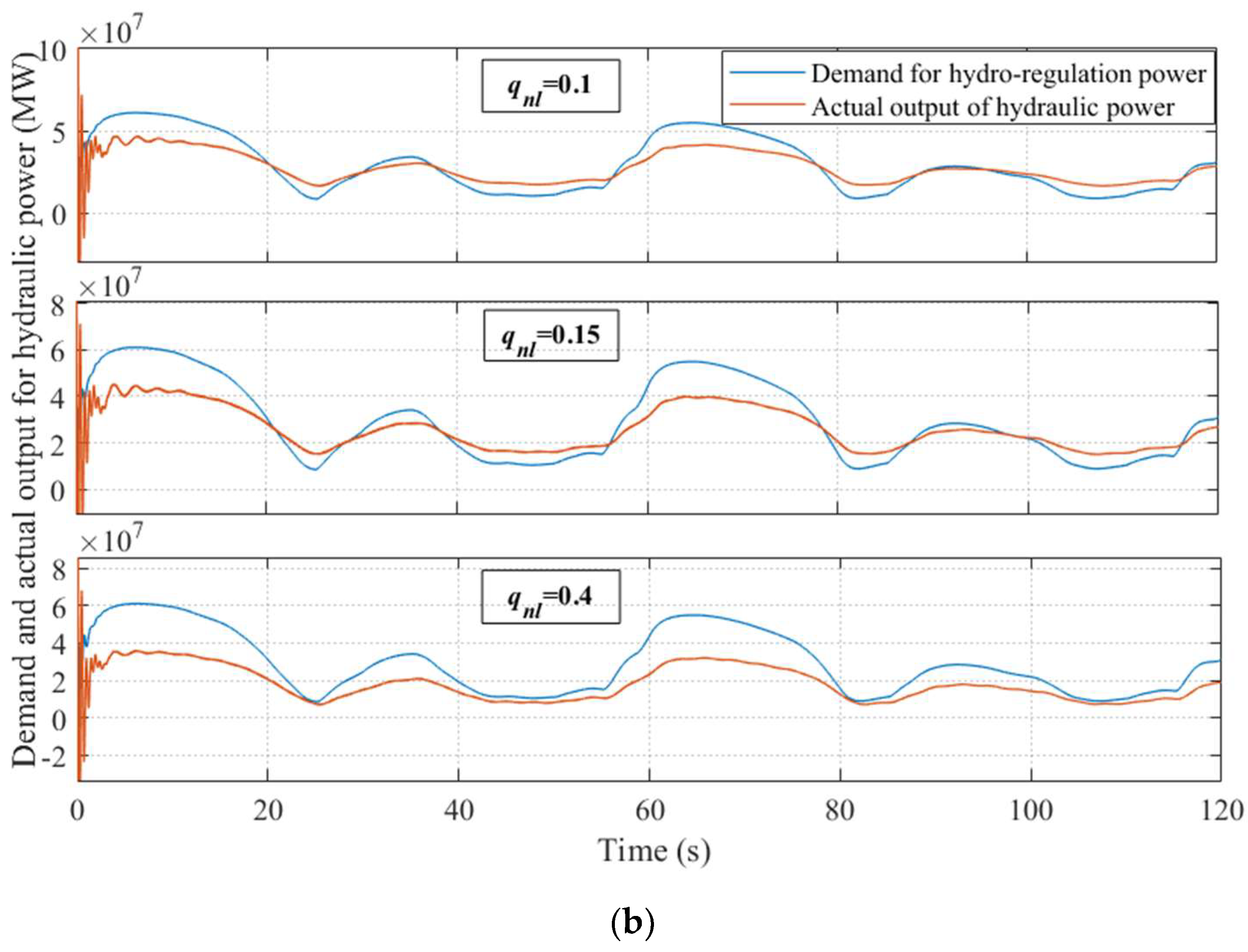
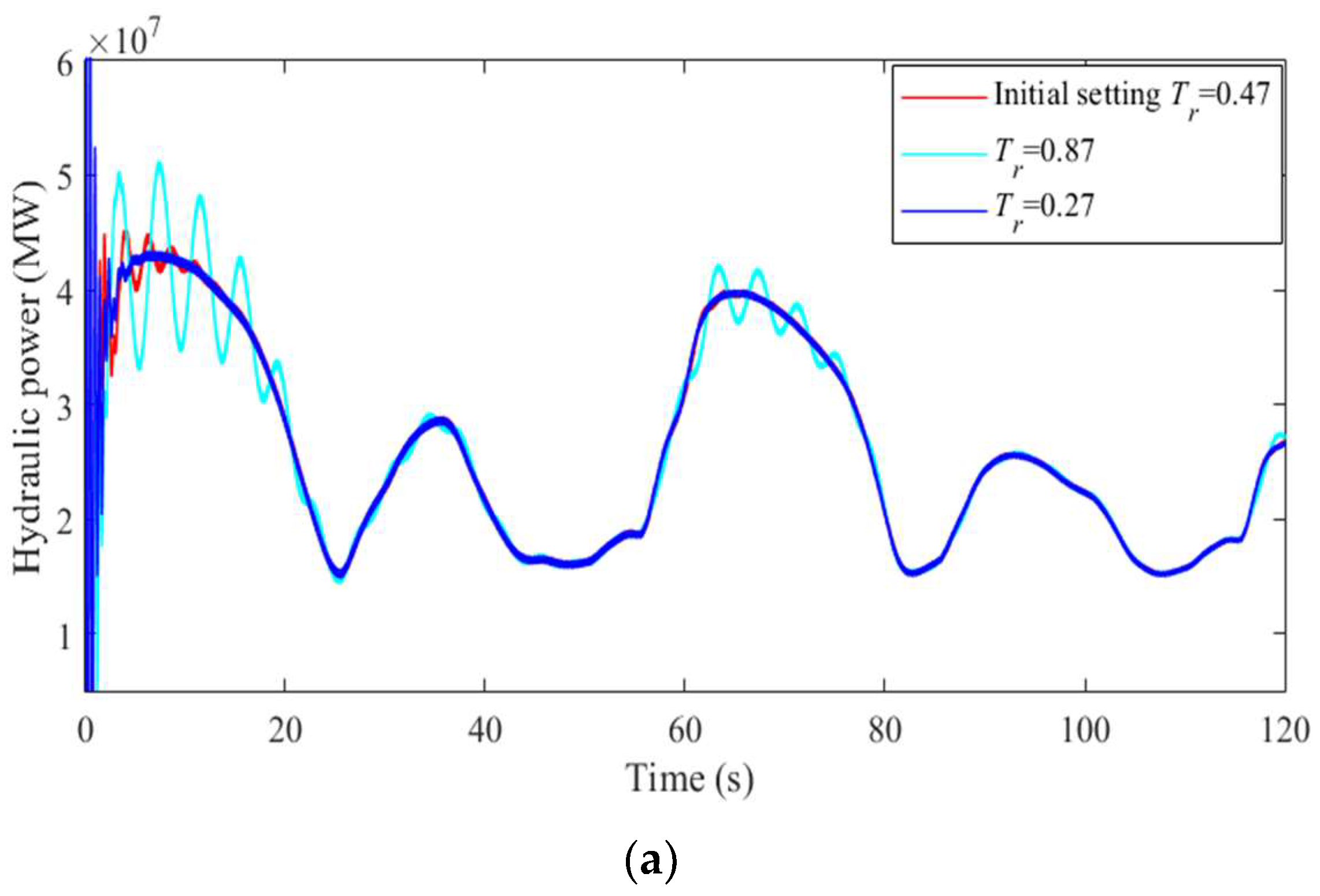
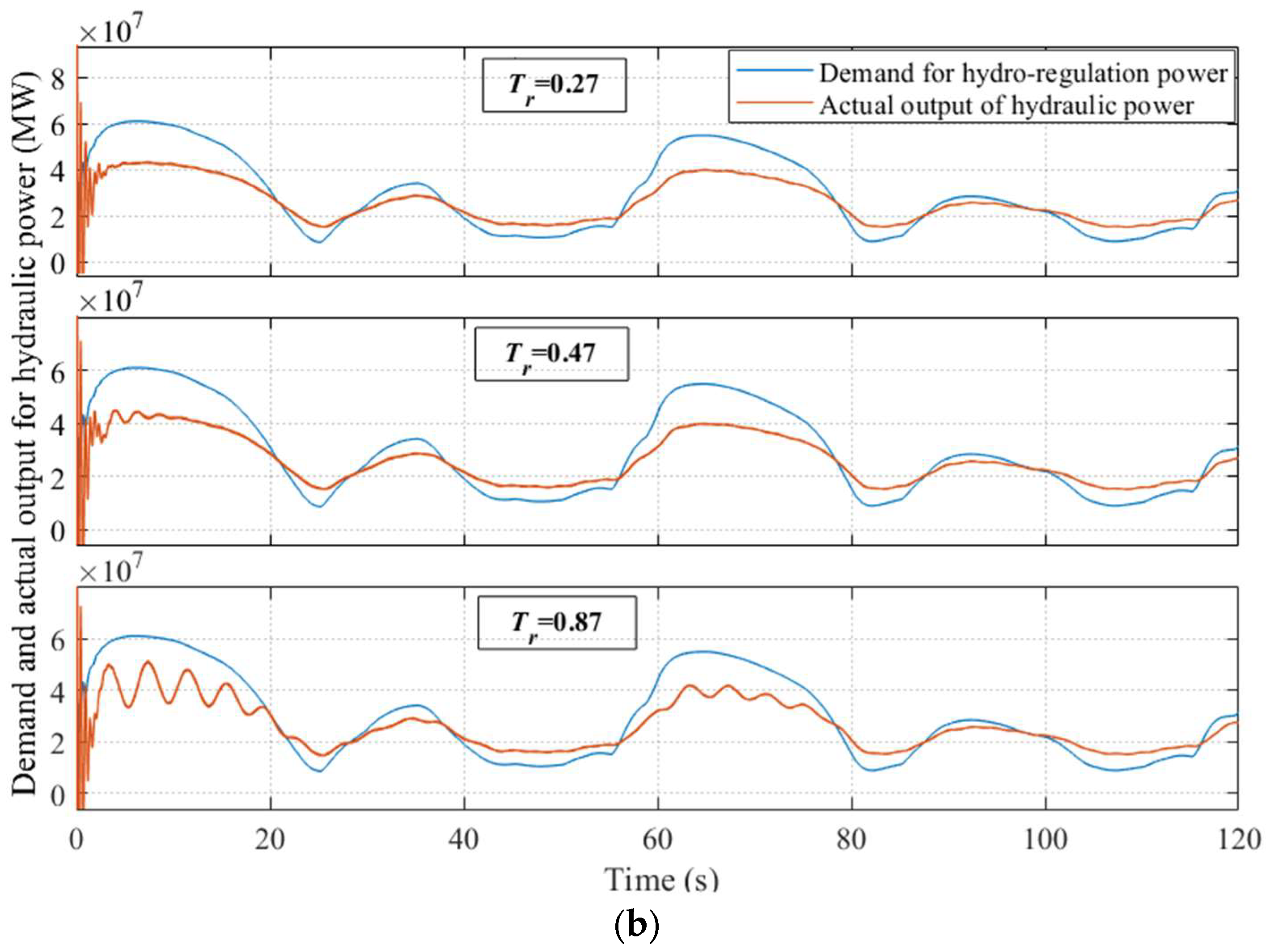
- Enhanced system performance: The complementary characteristics of the hybrid power system are closely related to the typical system parameters of the hydropower system, especially for the hydraulic parameters, such as the on-load flow of hydro-turbine and the elastic water-hammer time constant. The proper setting of such hydraulic parameters can increase the regulating capacity by nearly 9 MW.
- Suggestions for parameter setting: The hybrid power system shows an excellent complementary performance and also maintains stable operation when the typical system parameters (Kp, Ki, Kd, fp, Tr, qnl, xd, and xq) are appropriately set at the values of (2, 12, 0.1, 0.002, 0.27, 0.1, 0.8, 1), respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| A | sweep area |
| bp | coefficient of the permanent state difference |
| Cp | power coefficient |
| Dsh | damping coefficient |
| Eq | the q-axis transient electromotive force |
| Ef | excitation voltage |
| fp | head loss coefficient |
| H | inertia time constant of the wind turbine |
| hω | characteristic coefficient of the pipe |
| Id | d-axis currents |
| idg | d-axis current on the grid-side |
| idg-ref | reference value of the d-axis current on the grid-side |
| idr | rotor d-axis current |
| idr_ref | current reference value of the d-axis rotor |
| Iq | q-axis currents |
| iqr | rotor q-axis current |
| iqr_ref | current reference value of the q-axis rotor |
| iqg | q-axis current on the grid-side |
| iqg_ref | reference value of the q-axis current on the grid-side |
| Kd | differential adjustment coefficient |
| Ki | integral adjustment coefficient |
| Ki1 | integration coefficient of the active power control |
| Ki2 | integration coefficient of rotor side current control |
| Ki3 | integration coefficient of the voltage control |
| Ki4 | integral coefficient of the capacitor voltage controller |
| Ki5 | integration coefficient of the grid-side current controller |
| Kp | proportional adjustment coefficient |
| Kp1 | proportional coefficient of the active power control |
| Kp2 | proportional coefficient |
| Kp3 | proportional coefficient of the voltage control |
| Kp4 | proportional coefficient of the capacitor voltage controller |
| Kp5 | proportional coefficient of the grid-side current controller |
| Ksh | strength coefficient of the drive shaft |
| Lm | winding mutual inductance of rotor and stator |
| Lrr | rotor winding inductance of rotor and stator |
| me | electromagnetic torque |
| output power of ith wind turbine at time t | |
| Pref | reference value of the active power |
| Ps | active power of the generator |
| q0 | relative value of the flow in the initial operating condition |
| Tab | inertia time constant |
| Td0 | d-axis transient time constant |
| Tm | input torque of the rotor |
| Tr | elastic water-hammer time constant |
| Tsh | mechanical torque of the drive shaft |
| Twm | input mechanical torque |
| udc | capacitor voltage |
| udc_ref | reference value of the capacitor voltage |
| udg | target values of the output voltage with respect to the d axes |
| udr | target values of the rotor-side converter output voltage with respect to the d axes |
| uqg | target values of the output voltage with respect to the q axes |
| uqr | target values of the rotor-side converter output voltage with respect to the q axes |
| us | stator voltage |
| us_ref | stator voltage reference value |
| wind speed flowing through the i wind turbine at time t | |
| ωt | wind speed at time t |
| ωr | rotor speed |
| Xd | d-axis reactances |
| Xq | q-axis reactances |
| XTg | transformer reactance connecting the converter and the grid |
| YP | proportional of the governor regulated outputs |
| YD | differential components of the governor regulated outputs |
| YI | integral of the governor regulated outputs |
| δ | rotor angle |
| θtw | twist angle of the drive shaft |
| ρ | air density |
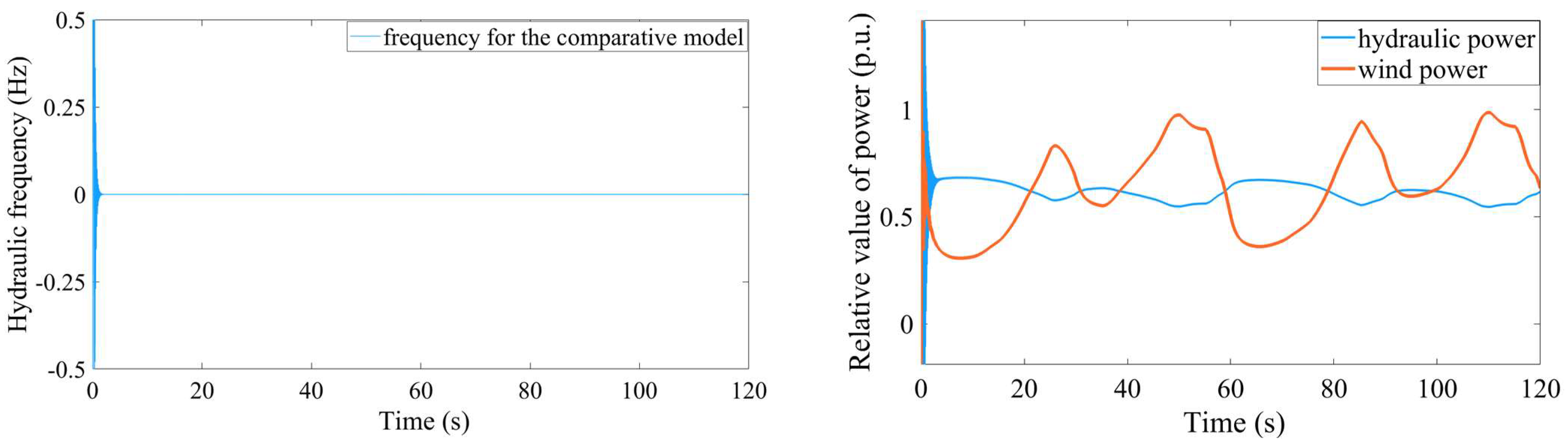
Appendix A. Comparison between the Models and Complementary Results

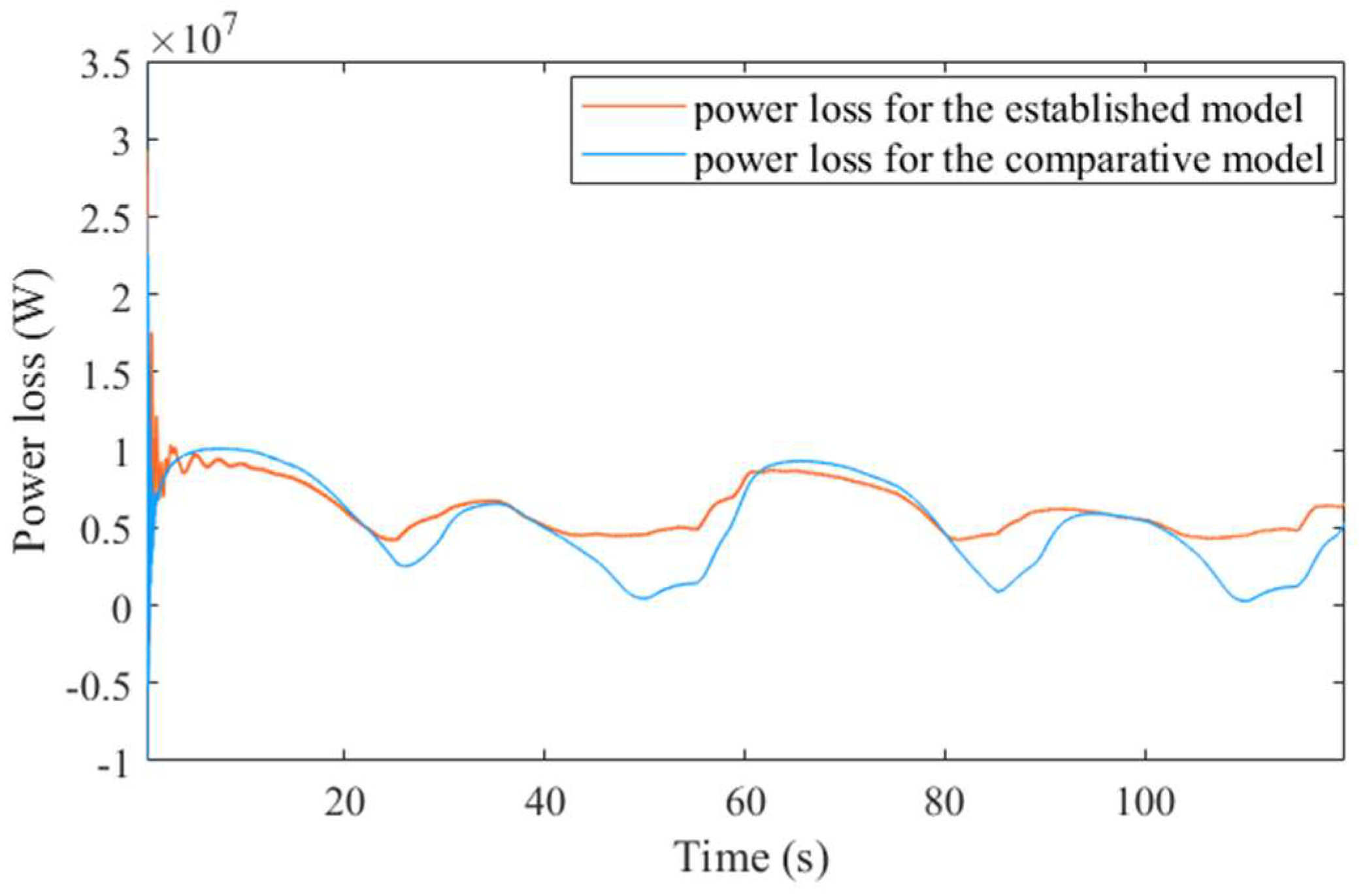
Appendix B. Model Comparison from the Perspective of Power Loss
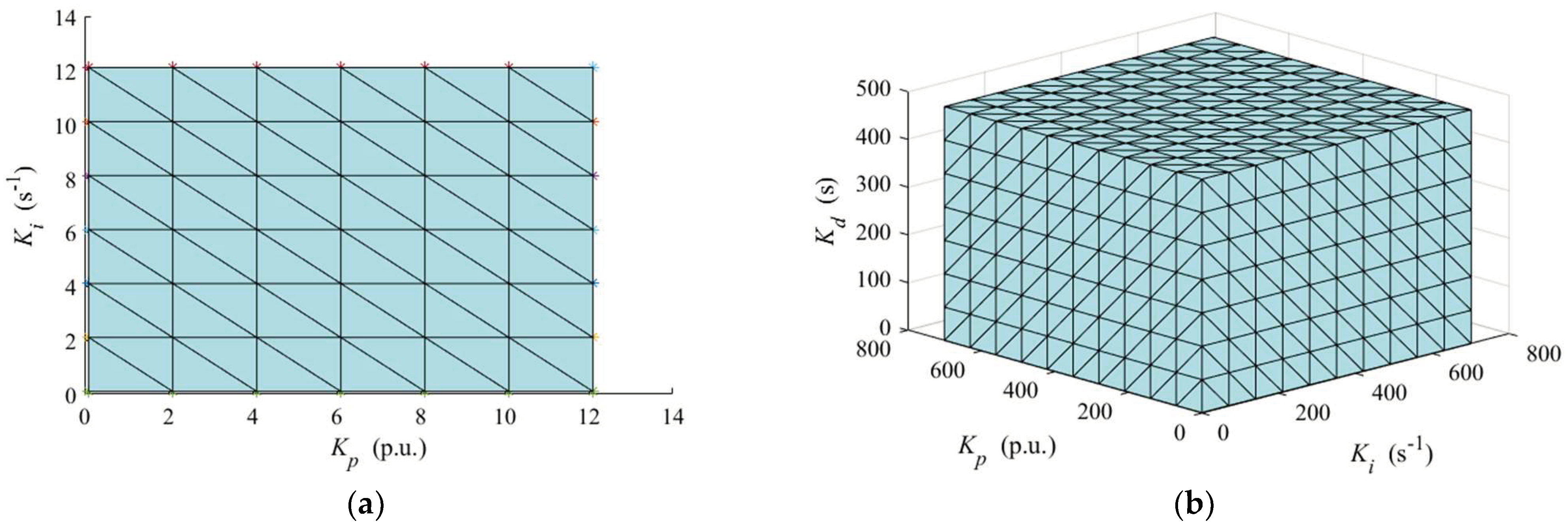
Appendix C. Descriptions of the Emerging Limitations of the Control Parameters and the Contradictions in Their Choice
References
- Zhu, F.L.; Zhong, P.A.; Xu, B.; Liu, W.F.; Wang, W.Z.; Sun, Y.M.; Chen, J.; Li, J.Y. Short-term stochastic optimization of a hydro-wind-photovoltaic hybrid system under multiple uncertainties. Energy Convers. Manag. 2020, 214, 112902. [Google Scholar] [CrossRef]
- Salem, S.; Rabeh, A.; Wafa, B.H.; Souad, C. Solar photovoltaic energy system-based shunt active filter for electrical energy quality improvement. Int. J. Simul. Process Model. (IJSPM) 2016, 11, 119–126. [Google Scholar]
- Li, F.G.; Chen, S.J.; Ju, C.Q.; Zhang, X.S.; Ma, G.W.; Huang, W.B. Research on short-term joint optimization scheduling strategy for hydro-wind-solar hybrid systems considering uncertainty in renewable energy generation. Energy Strateg. Rev. 2023, 50, 101242. [Google Scholar] [CrossRef]
- Topalovic, Z.; Haas, R. Role of Renewables in Energy Storage Economic Viability in the Western Balkans. Energies 2024, 17, 955. [Google Scholar] [CrossRef]
- Xie, T.T.; Zhang, C.B.; Wang, T.T.; Cao, W.Z.; Shen, C.H.; Wen, X.K.; Mao, C. Optimization and service lifetime prediction of hydro-wind power complementary system. J. Clean. Prod. 2021, 291, 125983. [Google Scholar] [CrossRef]
- Saidi, S.; Abbassi, R.; Amor, N.; Chebbi, S. Passivity-based direct power control of shunt active filter under distorted grid voltage conditions. Automatika 2016, 57, 361–371. [Google Scholar] [CrossRef]
- Saidi, S.; Chebbi, S.; Jouini, H. Harmonic and reactive power compensations by shunt active filter controlled by adaptive fuzzy logic. Int. Rev. Model. Simul. (IREMOS) 2011, 4, 1487–1492. [Google Scholar]
- Ding, Z.Y.; Wen, X.; Tan, Q.F.; Yang, T.T.; Fang, G.H.; Lei, X.H.; Zhang, Y.; Wang, H. A forecast-driven decision-making model for long-term operation of a hydro-wind-photovoltaic hybrid system. Appl. Energy 2021, 291, 116820. [Google Scholar] [CrossRef]
- Xiong, H.L.; Egusquiza, M.; Ostergaard, P.A.; Perez-Diaz, J.I.; Sun, G.X.; Egusquiza, E.; Patelli, E.; Xu, B.B.; Duan, H.J.; Chen, D.Y.; et al. Multi-objective optimization of a hydro-wind-photovoltaic power complementary plant with a vibration avoidance strategy. Appl. Energy 2021, 301, 117459. [Google Scholar] [CrossRef]
- Xiong, H.L.; Xu, B.B.; Kheav, K.; Luo, X.Q.; Zhang, X.J.; Patelli, E.; Guo, P.C.; Chen, D.Y. Multiscale power fluctuation evaluation of a hydro-wind-photovoltaic system. Renew. Energy 2021, 175, 153–166. [Google Scholar] [CrossRef]
- Wang, H.; Liao, S.L.; Liu, B.X.; Zhao, H.Y.; Ma, X.Y.; Zhou, B.B. Long-term complementary scheduling model of hydro-wind-solar under extreme drought weather conditions using an improved time-varying hedging rule. Energy 2024, 305, 132285. [Google Scholar] [CrossRef]
- Liu, B.X.; Liu, T.Y.; Liao, S.L.; Lu, J.; Cheng, C.T. Short-term coordinated hybrid hydro-wind-solar optimal scheduling model considering multistage section restrictions. Renew. Energy 2023, 217, 119160. [Google Scholar] [CrossRef]
- Zhou, S.Y.; Han, Y.; Zalhaf, A.S.; Chen, S.H.; Zhou, T.; Yang, P.; Elboshy, B. A novel multi-objective scheduling model for grid-connected hydro-wind-PV-battery complementary system under extreme weather: A case study of Sichuan, China. Renew. Energy 2023, 212, 818–833. [Google Scholar] [CrossRef]
- Sukah, T.; Saad, M.; Mougharbel, I. Long-term optimal coordination of hydro-wind-thermal energy generation using stochastic dynamic programming. Int. J. Green Energy 2024, 7, 1536–1549. [Google Scholar] [CrossRef]
- Lin, M.K.; Shen, J.J.; Cheng, C.T.; Lu, Q.; Wang, Y.Q. Long-term multi-objective optimal scheduling for large cascaded hydro-wind-photovoltaic complementary systems considering short-term peak-shaving demands. Energy Convers. Manag. 2024, 301, 118063. [Google Scholar] [CrossRef]
- He, Y.Y.; Hong, X.Y.; Wang, C.; Qin, H. Optimal capacity configuration of the hydro-wind-photovoltaic complementary system considering cascade reservoir connection. Appl. Energy 2023, 352, 121927. [Google Scholar] [CrossRef]
- Guo, Y.; Ming, B.; Huang, Q.; Liu, P.; Wang, Y.M.; Fang, W.; Zhang, W. Evaluating effects of battery storage on day-ahead generation scheduling of large hydro-wind-photovoltaic complementary systems. Appl. Energy 2022, 324, 119781. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, Z.P.; Zhou, J.L.; Cheng, C.T.; Su, H.Y. Developing operating rules for a hydro-wind-solar hybrid system considering peak-shaving demands. Appl. Energy 2024, 360, 122762. [Google Scholar] [CrossRef]
- Jiang, W.Y.; Liu, Y.Q.; Fang, G.H.; Ding, Z.Y. Research on short-term optimal scheduling of hydro-wind-solar multi-energy power system based on deep reinforcement learning. J. Clean. Prod. 2023, 385, 135704. [Google Scholar] [CrossRef]
- Shi, Y.H.; Wang, H.L.; Li, C.J.; Negnevitsky, M.; Wang, X.L. Stochastic optimization of system configurations and operation of hybrid cascade hydro-wind-photovoltaic with battery for uncertain medium- and long-term load growth. Appl. Energy 2024, 364, 123127. [Google Scholar] [CrossRef]
- Kumar, V.; Sharma, V.; Naresh, R. Leader Harris Hawks algorithm based optimal controller for automatic generation control in PV-hydro-wind integrated power network. Electr. Power Syst. Res. 2023, 214, 108924. [Google Scholar] [CrossRef]
- Li, H.H.; Mahmud, M.A.; Arzaghi, E.; Abbassi, R.; Chen, D.Y.; Xu, B.B. Assessments of economic benefits for hydro-wind power systems: Development of advanced model and quantitative method for reducing the power wastage. J. Clean. Prod. 2020, 277, 123823. [Google Scholar] [CrossRef]
- IEEE Group. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar] [CrossRef]
- Nicolet, C.; Greiveldinger, B.; Herou, J.; Kawkabani, B.; Allenbach, P.; Simond, J.J. High-order modeling of hydraulic power plant in islanded power network. IEEE Trans. Power Syst. 2007, 22, 1870–1880. [Google Scholar] [CrossRef]
- Zeng, Y.; Guo, Y.K.; Zhang, L.X.; Xu, T.M.; Dong, H.K. Nonlinear hydro turbine model having a surge tank. Math. Comput. Model. Dyn. Syst. 2013, 1, 12–28. [Google Scholar] [CrossRef]
- Wang, F.F.; Zeng, Y.; Qian, J. Nonlinear modelling and design of synergetic controllers for single penstock multi-machine hydropower system. Electr. Power Syst. Res. 2024, 234, 110584. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Chen, D.Y.; Liu, J.; Xu, B.B.; Venkateshkumar, M. A Feasibility Analysis of Controlling a Hybrid Power System over Short Time Intervals. Energies 2020, 21, 5682. [Google Scholar] [CrossRef]
- Lu, X.D.; Li, C.S.; Liu, D.; Wang, H.; Zhu, Z.W.; Ta, X.; Xu, R.L. Correlating analysis and optimization between hydropower system parameters and multi-frequency oscillation characteristics. Energy 2024, 304, 131789. [Google Scholar] [CrossRef]
- Dosoglu, M.K. Nonlinear dynamic modeling for fault ride-through capability of DFIG-based wind farm. Nonlinear Dyn. 2017, 4, 2683–2694. [Google Scholar] [CrossRef]
- Shah, N.N.; Joshi, S.R. Modal analysis for selection of DFIG-based wind farms for damping and reduction of the risk of SSR. IET Energy Syst. Integr. 2019, 4, 252–268. [Google Scholar] [CrossRef]
- Li, S.H.; Zhang, H.; Yan, Y.S.; Ren, J.F. Parameter Optimization to Power Oscillation Damper (POD) Considering its Impact on the DFIG. IEEE Trans. Power Syst. 2022, 2, 1508–1518. [Google Scholar] [CrossRef]
- Measurement and Instrumentation Data Center (MIDC). Available online: https://midcdmz.nrel.gov/apps/day.pl?NWTC (accessed on 1 December 2023).
- Ling, D.J. Bifurcation and Chaos of Hydraulic Turbine Governor. Ph.D. Thesis, Hohai University, Nanjing, China, 2007. Available online: http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1241732 (accessed on 1 January 2024).
- Pan, H.; Yang, J.; Yu, Y.; Zheng, Y.; Zheng, X.N.; Hang, C.Y. Intelligent Low-Consumption Optimization Strategies: Economic Operation of Hydropower Stations Based on Improved LSTM and Random Forest Machine Learning Algorithm. Mathematics 2024, 12, 1292. [Google Scholar] [CrossRef]
- Zhong, Z.W.; Zhu, L.K.; Fu, W.L.; Qin, J.F.; Zhao, M.Z.; Rixi, A. Parallel Disassembly Sequence Planning Using a Discrete Whale Optimization Algorithm for Equipment Maintenance in Hydropower Station. Processes 2024, 12, 1412. [Google Scholar] [CrossRef]
- Zhang, J.W.; Li, Z.Y.; Huang, J.L.; Cheng, M.R.; Li, H.K. Study on Vibration-Transmission-Path Identification Method for Hydropower Houses Based on CEEMDAN-SVD-TE. Appl. Energy 2022, 12, 7455. [Google Scholar] [CrossRef]
- Liu, T.; Kong, F.; Yang, L.F.; Guo, Z.Z. Operational risk assessment of hydropower units based on PSSCA-VMD-CNN-GBiLSTM and multi-feature fusion. Comput. Electr. Eng. 2024, 118, 109412. [Google Scholar] [CrossRef]
- Guo, W.C.; Qu, F.L. Stability control of dynamic system of hydropower plant with two turbine units sharing a super long headrace tunnel. J. Frankl. Inst.-Eng. Appl. Math. 2021, 358, 8506–8533. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, H.; Li, H.; Zhang, Z.; Sun, W. Complementary Analysis and Performance Improvement of a Hydro-Wind Hybrid Power System. Water 2024, 16, 2912. https://doi.org/10.3390/w16202912
Jia H, Li H, Zhang Z, Sun W. Complementary Analysis and Performance Improvement of a Hydro-Wind Hybrid Power System. Water. 2024; 16(20):2912. https://doi.org/10.3390/w16202912
Chicago/Turabian StyleJia, Huiyang, Huanhuan Li, Zhiwang Zhang, and Weihua Sun. 2024. "Complementary Analysis and Performance Improvement of a Hydro-Wind Hybrid Power System" Water 16, no. 20: 2912. https://doi.org/10.3390/w16202912
APA StyleJia, H., Li, H., Zhang, Z., & Sun, W. (2024). Complementary Analysis and Performance Improvement of a Hydro-Wind Hybrid Power System. Water, 16(20), 2912. https://doi.org/10.3390/w16202912