1. Introduction
Rain-on-snow (ROS) events occur when rain falls on the existing snowpack [
1], often leading to substantial snowmelt and occasionally resulting in dangerous amounts of water runoff. The excess runoff resulting from ROS events is generally the result of soil saturation levels being too high to absorb new moisture combined with snowmelt caused by warm temperatures and high humidity accompanying rainfall [
2]. If the combined rainfall and snowmelt produced by an ROS event is large enough to cause flooding, it is referred to as an ROS event with flood-generation potential [
3]. Although not all ROS events possess flood-generation potential, those that do pose an immediate concern because of the catastrophic damage caused by ensuing floods on local infrastructure. The concern surrounding ROS events with flood-generation potential is also supported by an observed increase in their frequency over the past 50 years with rising global temperatures due to climate change [
4].
There are many existing methods that define the necessary weather conditions for an ROS event to occur, all of which involve some nominal amount of precipitation falling on snowpack. Specific variables used to provide these conditions relate to snowpack in and outflow (e.g., temperature, precipitation, snowmelt, snow water equivalent (SWE), etc.). Mazurkiewicz et al. (2008) [
5] required there to be at least 0.254 mm of precipitation falling on snowpack over a 24 h period (divided into three-hour time steps) in order to qualify as an ROS event. Expanding the time window, Freudiger et al. (2014) [
3] employed a “3 mm over 6 days threshold” when screening for ROS events with flood generation potential. In another example, the methodology of Musselman et al. (2018) [
6] focused on ROS events with flood-generation potential, described in detail in
Section 2.4. We note some of the differences in these ROS definitions stem from differences in geographical and climatological contexts. For example, two of these studies focused on the Western United States [
5,
6], while one focused on Central Europe [
3]. Further, each study used different types of data, including historical in situ measurements [
5], historical reanalysis data [
3], and model-based climate simulations [
6]. Despite these differences, these studies provide themes for identifying ROS events with flood-generation potential that inform our current work, as will be explained in the following sections.
Snowmelt is a less commonly reported meteorologic variable that is often difficult to precisely measure. Yan et al. (2018) [
7] proposed the use of next-generation intensity duration frequency curves—a recently adapted modeling method used in hydrologic design to accommodate “extreme hydrometeorological events” in locations with heavy snowfall—to estimate precipitation and the resulting “water available for runoff”, or snowpack drainage/melt. They calculate snowmelt directly by examining daily fluctuations in precipitation and SWE within the snowpack to determine its net water content. This calculation is useful because recorded snowmelt measurements are difficult to directly obtain.
One weather-related variable excluded from Musselman et al. (2018) [
6]’s ROS classification approach, but included in a number of other approaches, is air temperature. Temperature often serves as a primary indicator for distinguishing between rain and snowfall; however, despite the freezing point being at 0 °C, precipitation type is also influenced by factors like elevation and various other location-dependent conditions. Research on phase partitioning methods to improve the accuracy of making this distinction was discussed by Harpold et al. (2017) [
8], who stated that increased accessibility of more sophisticated methods than those available currently is necessary to accurately determine phase partitions. Wang et al. (2019) [
9] suggested using wet-bulb temperature as an alternative to near-surface air temperature to differentiate between rain and snowfall since the latter tends to underestimate snowfall in drier regions. Due to the ambiguity in using temperature to distinguish between precipitation as rain and snowfall, ROS classification methods relying on snowpack water content fluctuation are considered somewhat more reliable than methods only employing temperature thresholds.
Much research has been conducted throughout the past several decades to investigate how snowpack characteristics fluctuate during ROS events. Heggli et al. (2022) [
10] discussed modeling weather and snowpack conditions for ROS events in order to inform snowpack runoff decision support systems at the site where snowfall occurs and “consider[s] the potential for terrestrial water input from the snowpack”. Wayand et al. (2015) [
11] focused on how topography, vegetation, and storm energy influence melt from snowpack during ROS events. Floyd and Weiler (2008) [
12] examined snow accumulation measurements and ablation dynamics in ROS events with a focus on snowpack, mentioning how ROS “is the primary generator of peak flow events in mountainous coastal regions of North America”. Würzer et al. (2016) [
13] also called out the large peakflow magnitudes produced by ROS events in mountainous areas in the past. Both Wever et al. (2014) [
14] and Singh et al. (1997) [
15] explored how rainfall, snowmelt, SWE, soil temperature, and additional weather parameters impact runoff observed at snow measurement stations. These studies made valuable contributions to a deeper understanding of snowpack behavior during ROS events, many of them mentioning impacts on streamflow, but none of them directly addressed the impact of ROS on streamflow.
The limited research that exists linking ROS events to streamflow responses predominantly focuses on modeling and predicting streamflow behavior. For example, Rücker et al. (2019) [
16] discussed the effects of snowpack outflow on streamflow after ROS events, factoring in the influence of vegetation in their study analyzing data from 2017 and 2018 at several locations in Switzerland. Further, Surfleet and Tullos (2013) [
17] investigated the correlation between ROS precipitation events and peak daily flow events in Oregon. Their findings projected a decrease in ROS events leading to high stream peakflows at lower and mid-level elevations, alongside an increase at higher elevations, as climate change perpetuates rising global temperatures. Myers et al. (2023) [
18] investigated the impact of ROS events on the hydrology of the North American Great Lakes Basin under climate change, finding a significant reduction in melt in warmer regions but minimal change in colder areas. Additionally, their study highlighted the increasing proportion of rainfall over snowfall, affecting snowpack formation and suggesting implications for freshwater ecosystems and human activities reliant on snow. These studies emphasize the importance of quantifying the magnitude of ROS impacts—since there are many areas across the world with high flood risk due to elevation and changing climate conditions—but none of them quantify the impact of ROS events on flooding in comparison with flooding produced in non-ROS scenarios.
Quantifying increases in streamflow accompanying ROS events has the potential to not only improve understanding of characteristic ROS magnitude in comparison with typical floods but also influence culvert and infrastructure design in an engineering setting. The Hydrologic Engineering Center Hydrologic Modeling System (HEC-HMS), built by the US Army Corps of Engineers, is software “designed to simulate the complete hydrologic processes of dendritic watershed systems” [
19]. This engineering tool is used by engineers to simulate hydrologic conditions within a watershed basin and generate predictions of runoff volume and flow [
20]. An estimated flood surcharge associated with ROS events would allow engineers using HEC-HMS to adjust simulated flow rates to more accurately model the output of ROS-induced floods and appropriately adjust infrastructure design in at-risk areas.
The remainder of this paper explores temperature, snowpack, and precipitation conditions that precede recorded stream surges in mountain locations across the Western United States. Our unique approach links lower elevation stream gages to higher elevation snow measurement locations, rather than only observing the response of snowpack. To accomplish this, we
Create a dataset linking historical streamflow peaks across the Western United States to spatially relevant weather conditions,
Use generalized additive models (GAMs) to represent both ROS and non-ROS-induced peak surges at a regional scale, and
Examine the differences between ROS- and non-ROS-induced surge representations to quantify ROS impact on streamflow.
Modeling this relationship provides us with a better quantitative understanding of the difference between these two characteristic flood types, allowing infrastructure designers to better anticipate and prevent catastrophic flood damage from occurring in areas vulnerable to ROS-induced flooding.
The remainder of this paper proceeds as follows: In
Section 2, we give an explanation of the Western United States streamflow/weather data cleaning and preparation processes as well as the details behind the formation of a streamflow peak dataset. In
Section 3, we use GAMs and other machine learning (ML) models to represent streamflow surges from the peak dataset formed in
Section 2 and examine the distribution of ROS- to non-ROS-induced surge ratios. In
Section 4, we discuss conclusions and areas for future work.
2. Methods
A primary contribution of this paper is a new dataset relating observed surges in streamflow to the weather conditions that preceded the surge. We then classify those weather conditions as ROS or non-ROS-based on variable thresholds described later in this section. To create the dataset, we aggregate streamflow measurements and weather data based on watershed boundaries. The dataset is then used to compare surge size in ROS and non-ROS-induced floods.
Table 1 describes the data sources used to obtain the relevant variables. Streamflow, SNOTEL, and PRISM data are accessed through functionality available in the
rsnodas package [
21]. Data collection is limited to the area encompassed by the Western United States, including the states of Arizona, California, Colorado, Idaho, Montana, Nevada, New Mexico, Oregon, Utah, Washington, and Wyoming.
Our primary interest in the streamflow measurements is identifying peaks, or surges, in streamflow. We employ the
cardidates R package to identify peaks, which contains the functionality to detect peaks within times series data [
26]. The raw streamflow measurements are available at both daily and sub-hourly frequencies, but are often reported on irregular 15-min intervals with stretches of missing values. It is possible that these intervals of missing measurements are sometimes the result of flow rising to unusually high levels, causing gage sensors to malfunction [
27,
28]. In order to perform peak detection, we require that the data resemble a complete time series, with non-missing measurements reported at regular time intervals. To correct the time series intervals while still preserving the temporal scale of the data, we retain hourly maximum streamflow measurements and linearly interpolate any missing values in the hourly time series using the neighboring streamflow measurements. While some streamgages required multiple attempts to successfully download their measurements, our data download process results in the collection of 22.1 million hourly streamflow measurements from 2348 of 2586 possible streamgages.
2.1. Peak Detection and Baseflow Calculation
Once the data are appropriately organized, we use an application of the
peakwindow() function from the
cardidates R package to detect peaks within the data based on a user-specified threshold. Whenever possible, we use predefined flood stages as this threshold. The National Weather Service defines flood stage as “the stage at which overflow of the natural banks of a stream begins to cause damage in the local area from inundation (flooding)” [
22]. Predetermined flood stages are published online by the USGS for 737 of the 2586 streamgages originally involved in our study (28.5 percent). Flood stages for the remaining 1849 gages are estimated using a multiplier based on each station’s maximum recorded streamflow measurement. The multiplier is defined as the median ratio between the maximum recorded streamflow measurement and the recorded flood stage from the previously described set of 737 stations. The ratio between the maximum recorded streamflow measurement and the flood stage varies widely from 0.05 (i.e., flood stage is 5 percent of the maximum recorded streamflow measurement) to more than 10 (i.e., flood stage is 10 times the maximum recorded streamflow measurement). That said, the interquartile range of these ratios falls in a relatively tight range of 0.44 to 0.88, suggesting that a typical flood stage tends to be between 44–88 percent of the maximum recorded streamflow measurement. With this in mind, we select the median value of 0.67 as the multiplier to estimate flood stages as a function of maximum recorded streamflow. In other words, for stations lacking pre-defined flood stages, stream surges are only retained if the surge is larger than 66 percent of the maximum recorded streamflow measurement. The use of this multiplier attempts to strike a balance between focusing on streamflows with flood generation potential, while still preserving an adequate sample size for analysis. One limitation of this approach is the dependence upon the maximum recorded streamflow measurement, which, while easy to obtain, is sensitive to outliers. While our results suggest a reasonable balance between flood-stage-defined stream surges and flood-stage-estimated stream surges, future work should consider alternative methods for imputing flood stage thresholds.
The
cardidates package documentation [
26] describes how the
peakwindow() function operates in two steps: (1) peak identification and (2) peak refinement. We summarize their description of the peak detection process in the context of this specific project as follows:
Peak identification: Every streamflow value that exhibits a higher value than at the timestamps directly before and after its occurrence is identified as a peak.
Peak refinement: The list of identified peaks is refined by defining ‘subpeaks’ that are excluded from the finalized peak list. Subpeaks are characterized by either having a height that falls below the flood stage threshold at their corresponding streamgage or by not having a sufficiently large trough, or pit, between neighboring peaks. This refinement process is repeated until there are no more subpeaks.
After defining existing/estimated flood stages for each streamgage, we implement the peak detection algorithm using the peakwindow() function and identify peaks at 2199 of the 2348 available streamgages using each gage’s full period of record. We detect a total of 60,811 peaks between all the streamgages. Of these 60,811 peaks, 55,207 are reported at streamgages with estimated floodstages (90.8 percent). The majority of the 2199 gages reporting peaks have 30–40 years worth of data and began recording streamflow measurements at the subhourly level between 1986 and 1990, the first recorded date being 1 January 1980. Note that this study treats each stream surge as a unique and independent observation, which means that streamgages with longer periods of record have a greater influence on model results.
In order to examine differences in streamflow surges between ROS and non-ROS peaks, we obtain a baseflow (
) measurement preceding each peakflow (
) measurement and define stream surge (
g) in Equation (
1) as
Peakflow measurements for each streamgage are reported by the peak detection algorithm along with the timestamp. We calculate baseflow by finding the median of hourly streamflow measurements at the relevant streamgage in the two-week period prior to the stream surge peak. For instances where two peaks occur in a time period shorter than two weeks, we adjust the algorithm to use the median of the streamflow measurements in the time between the two neighboring peaks to describe the baseflow of the latter peak.
2.2. Weather Data
Weather data measurements are obtained at a daily level for 808 SNOTEL stations across the 11 states of interest. The specific variables we use to inform ROS flood classification and surge representation include the following:
Temperature (Temp in °C)
Precipitation (Precip in mm)
Snow Depth (SD in cm)
Snow Water Equivalent (SWE in mm)
Soil Moisture (SM as percentage)
Elevation (Elev in m)
Snowmelt (Melt in mm)
SNOTEL stations use devices called snow pillows to measure SWE, which describes the water content available in the snowpack [
29]. Melt (
) is not a variable reported directly by SNOTEL stations, so we calculate it using Yan et al. (2018) [
7]’s method with measured Precip and SWE. This calculation is performed as follows:
where
represents SWE,
p represents Precip, and
q represents day. Equation (
2) assumes that measured Precip is equivalent to the increase in water content of the snowpack on days with no snow melt. Any bias in measurements of Precip or SWE would thus be reflected in this calculation. Future research should compare this calculation to modeled estimates of snow melt such as those available in the Snow Data Assimilation System (SNODAS) [
30]. This snow melt measurement is used in the Musselman et al. (2018) [
6]’s ROS classification framework described previously.
2.3. Associating Streamgages and SNOTEL Stations
The USGS’s Hydrologic Unit Code (HUC) system divides the United States into a set of drainage basins at six different spatial scales, ranging from continental (HUC 2) to local (HUC 12). A drainage basin, or watershed, is an area of land that captures precipitation and channels it into a creek, river, or stream, eventually leading to the ocean [
31]. In order to associate the streamgages and SNOTEL stations in our dataset, we group them together by HUC 8 watershed boundaries. We only retain measurements contained in watersheds that have at least one SNOTEL station and at least one streamgage. Connecting streamgages and SNOTEL stations in this way assumes that measured water at SNOTEL stations will flow to the streamgages existing in the same HUC 8 basin. After associating streamgages and SNOTEL stations by HUC region, only 7807 of the 60,811 (13 percent) peaks remain for analysis at 1279 unique streamgages. Of these remaining peaks, 4977 (64 percent) are reported by streamgages with estimated flood stages. This considerable post-association decrease as well as intermediary decreases in usable SNOTEL station and streamgage counts are shown by
Table 2. Despite the data loss, exploration of ROS in HUC 8 watersheds containing SNOTEL stations allows us to target streamgages in mostly mountainous areas prior to flood control measures (i.e., dams), which are likely the streamgages most sensitive to fluctuations from ROS events.
2.4. Daily ROS Event Classification
Recall the many different ways of defining an ROS event in
Section 1. In this study, we employ the Snowmelt calculation utilized by Yan et al. (2018) [
7] (and subsequently defined in Equation (
2)) in conjunction with Musselman et al. (2018) [
6]’s ROS classification approach. We implement this method using historical Precip and SWE values reported by SNOTEL stations. This method requires that the following three conditions be met in order to positively classify an ROS event:
mm
mm
where
p is Precip,
is SWE, and
is Snowmelt. After identifying days when ROS event conditions have been met at individual SNOTEL stations, we determine whether a day qualifies as an ROS event day at the HUC 8 level by requiring that at least half of the SNOTEL stations within a HUC region fulfill the requirements for an ROS event to occur. We then classify peaks as ROS induced if they occur within seven days of an ROS event in their respective HUC region. Of our remaining peaks, 2725 are classified as ROS induced (34.9 percent) and the remaining 5082 (65.1 percent) as non-ROS-induced.
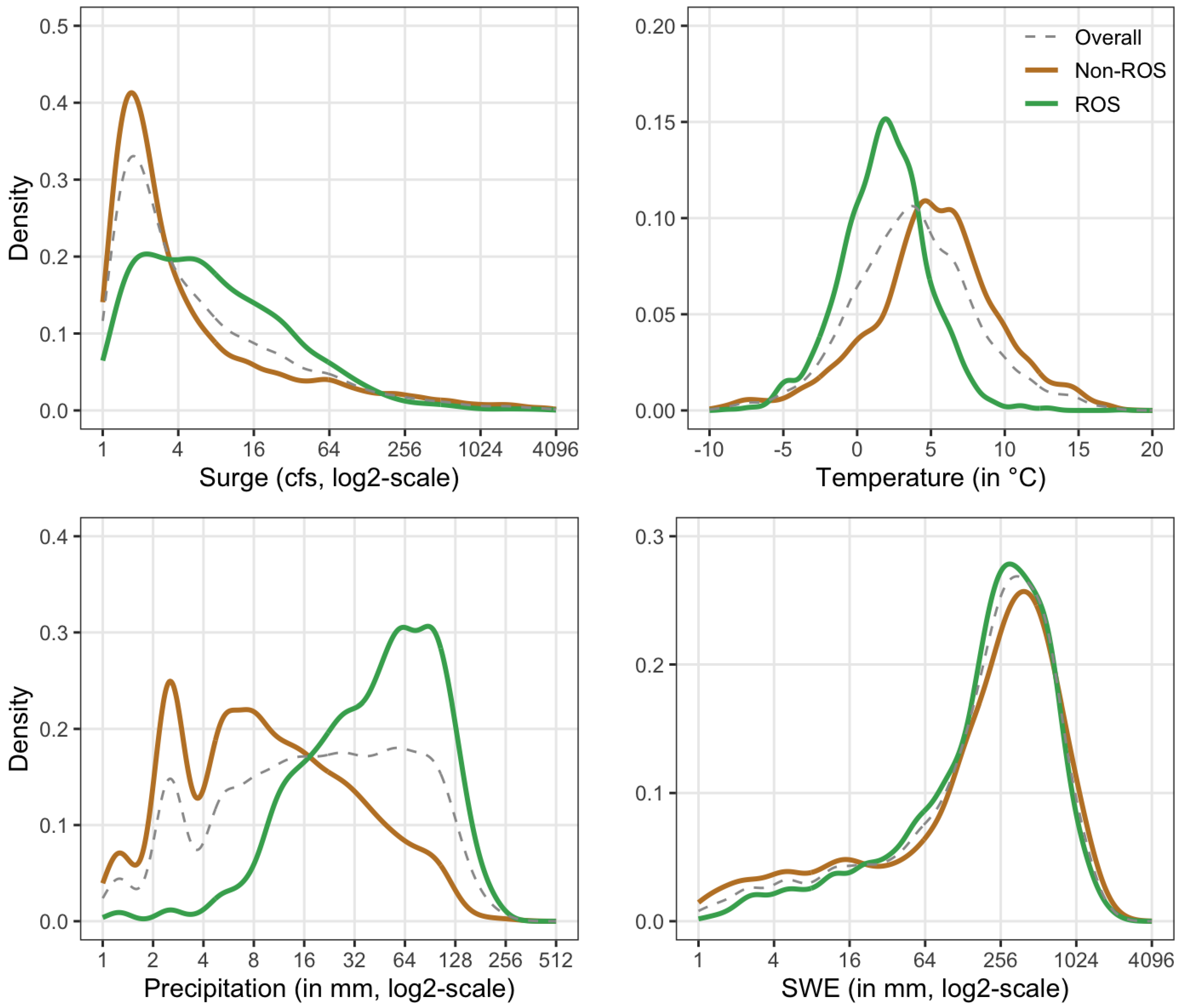
Figure 1 shows the distributions of surge magnitude in ROS- and non-ROS-induced floods classified using this method. We see that non-ROS-induced surges tend to be considerably smaller than those that are ROS induced, and that the overall surge distribution most closely resembles the distribution of non-ROS-induced surges.
We also explore the different distributions of the weather conditions preceding a stream surge for both ROS and non-ROS events in
Figure 1. The distributions of Temp, Precip, and SWE are shown to highlight differences between ROS and non-ROS behaviors. We see that temperatures for ROS-induced peaks tend to be around 2.8 °C lower than those that are non-ROS-induced, possibly due to the time periods throughout the year in which both peak types are more likely to occur. The left skew in ROS compared to the right skew of the non-ROS Precip measurements indicate that for surges classified as ROS induced, Precip measurements preceding the surge tend to be substantially larger. ROS and non-ROS follow similar distributions for SWE.
However,
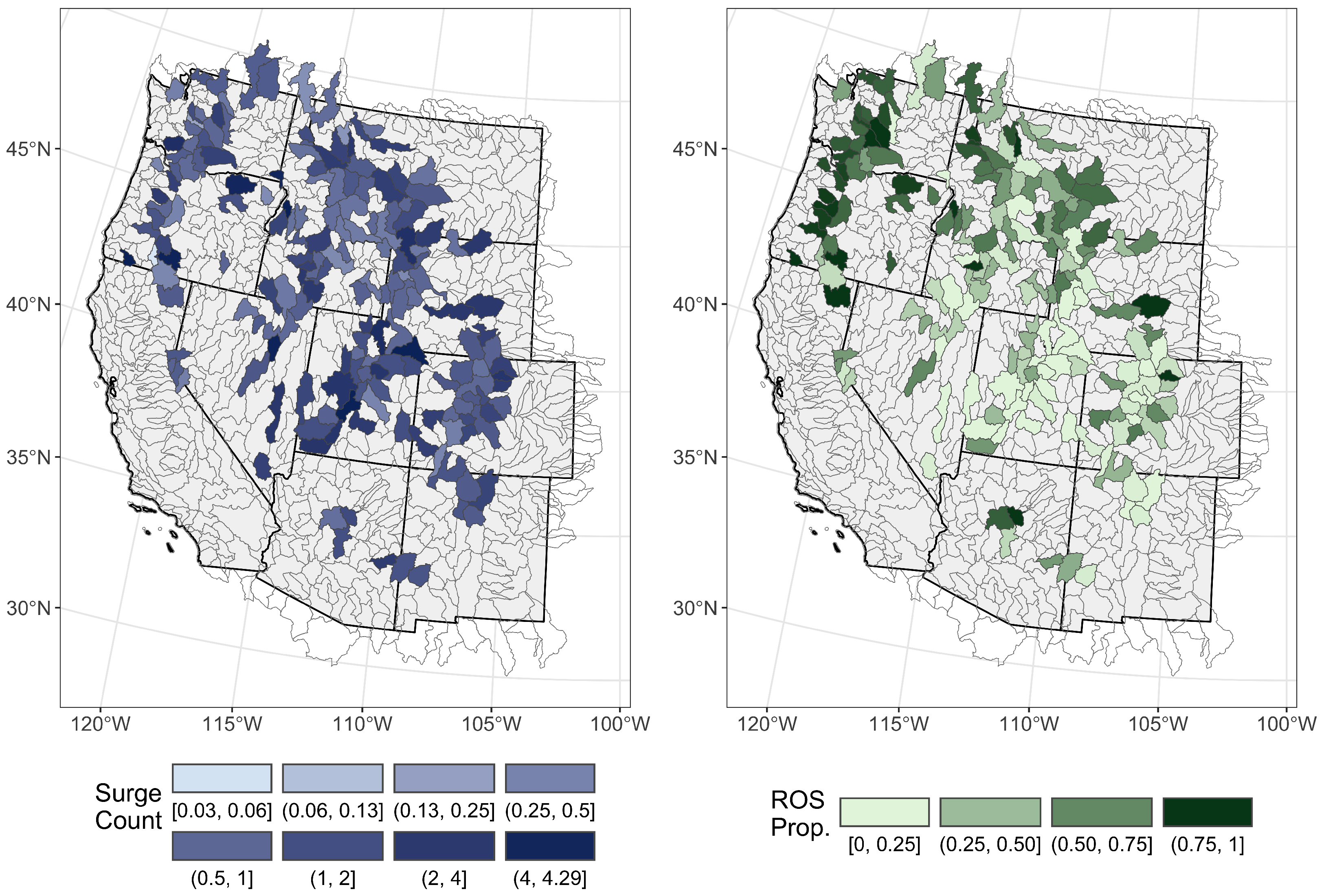
Figure 1 ignores the spatial structure inherent in the data, as ROS events do not occur at the same rate across the Western United States.
Figure 2 visualizes the spatial distribution of surge counts and relative surges attributed to ROS events in the region of interest. We see that there is a higher proportion of ROS surges in the Northwest, confirming that ROS events tend to occur more frequently in northern mountainous regions near the coastline [
6]. It also shows that the overall surge count per year by HUC 8 region does not follow a clearly identifiable pattern across the region of interest.
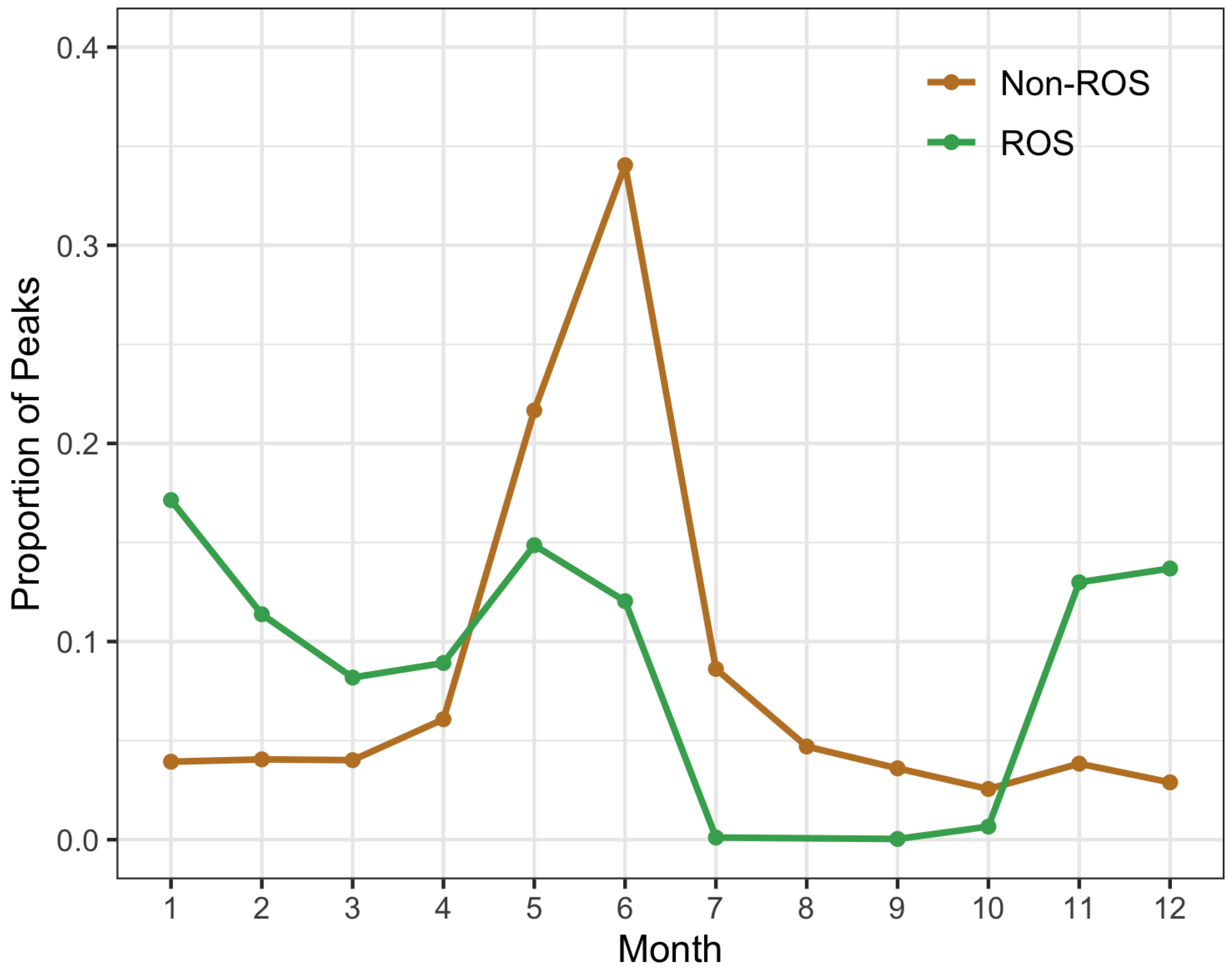
Figure 3 shows the frequency of ROS- and non-ROS-induced surges by month. We observe that the majority of non-ROS-induced flooding occurs during the spring and summer months, specifically in May and June, likely in the form of spring runoff. In contrast, ROS-induced floods seem to occur in roughly equal proportions from November to January as well as May.
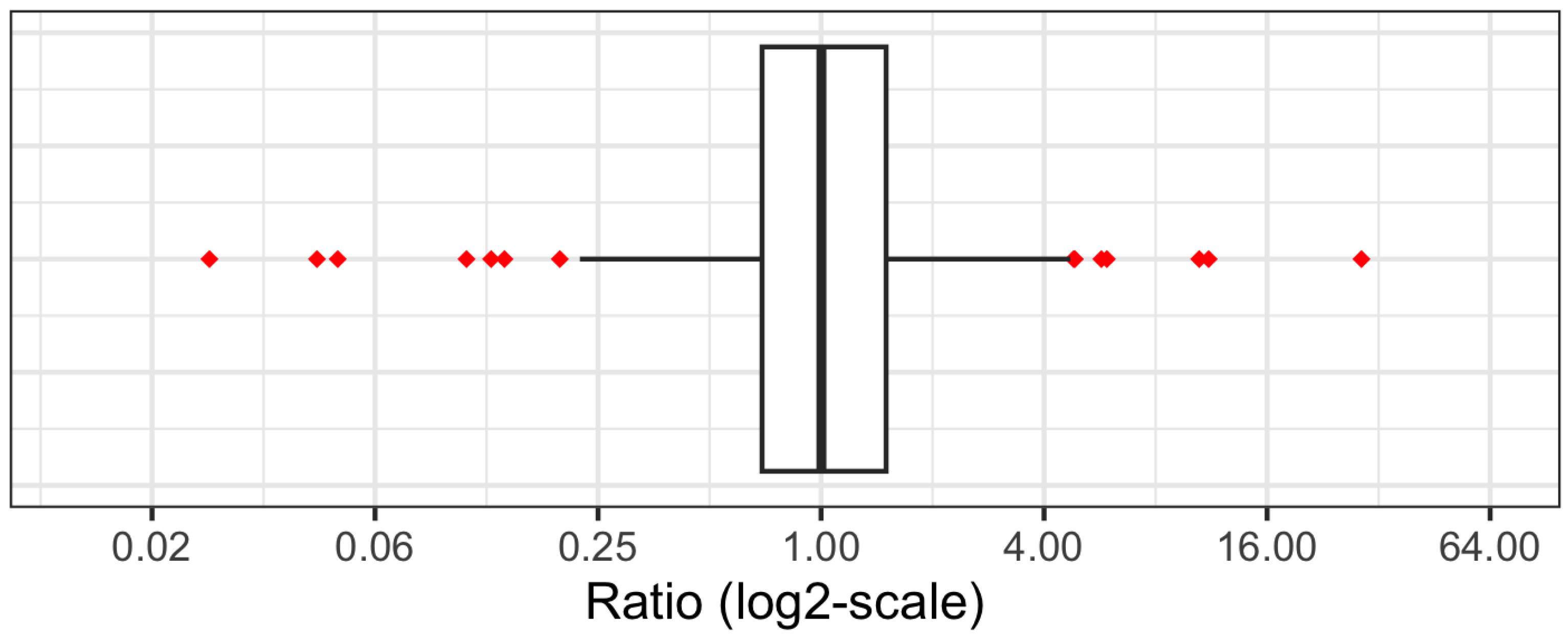
We next examine the distribution of the ratios of ROS vs. non-ROS-induced surges. This ratio is calculated for an individual streamgage in Equation (
3):
where
r is the ratio of surges,
is the station-level median of all ROS-induced surges, and
is the station-level median of all non-ROS-induced surges. Only the 245 streamgages with at least two non-ROS and ROS peaks are considered in the final distribution. Due to our relatively small sample size of peaks and the inherently sensitive nature of ratio calculations,
tends to be overly influenced by outlier observations.
Figure 4 shows the full range of these empirical ratios, with the largest and smallest outliers indicating, respectively, that there were streamgages whose median ROS surges tended to be 30 times larger and 50 times smaller than their median non-ROS surges.
2.5. Database Description
For each of the 7807 remaining flood peaks in our analysis, we link weather variables to the streamgage’s peak occurrence by calculating summaries of measurements from SNOTEL stations located in the same HUC region for the 5 days prior to the peak day. We assume the dependence of streamflow response upon the accumulation of Precip, SD, etc. during the 5 days leading up to the peak. The choice of five days is similar to the six-day window explored by Freudiger et al. (2014) [
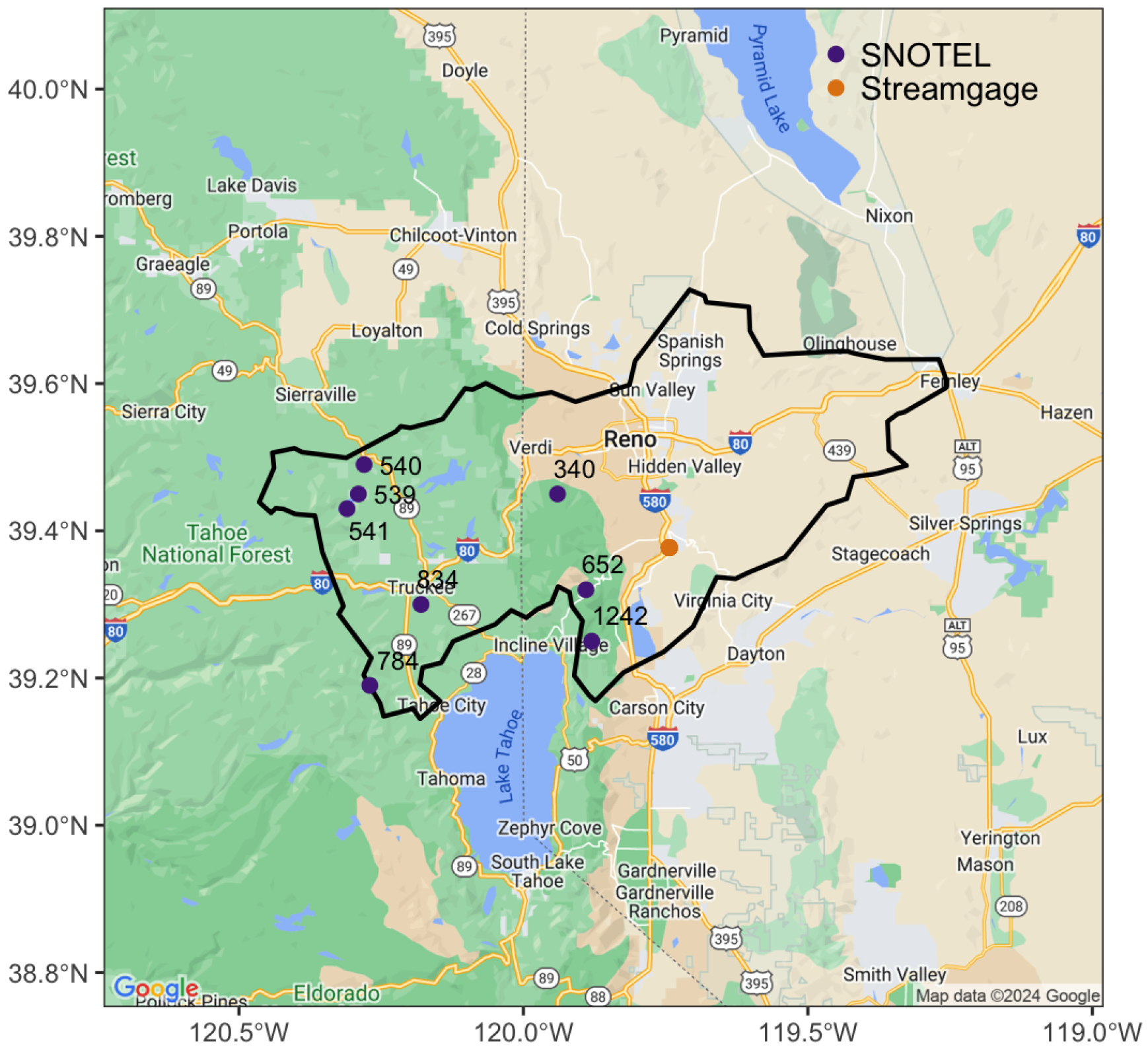
3] and is intended to account for the fact that it may take several days for streamflow to respond to an ROS event occurring in a separate part of the same watershed. That said, future work should determine the sensitivity of the ROS classification to variations in the period of time preceding a stream surge that is considered for ROS classification. For each weather variable, values for all SNOTEL stations within the relevant HUC region over the given time period are collected, and the HUC-level median of the following summary statistics is calculated separately for each station: mean, median (station-level), minimum, and maximum. The sum of Precip over this time period is also calculated. The overall median value for the entire HUC region for each summary statistic is then added to the data frame containing peak information. We include an example of this aggregation for a single ROS-induced streamflow peak near Reno, Nevada on 10 February 2017. The map in
Figure 5 shows the spatial distribution of the SNOTEL stations and streamgage within the HUC 8 boundary.
We show the aggregation of data required to connect SNOTEL weather data with the streamgage in
Table 3. This example only shows the aggregation for the means of each weather variable to demonstrate the workflow—median, minimum, and maximum measurements are also computed and stored in a similar manner. The ‘HUC’ column in this table represents the specific values appended to this peak observation in the peak data frame. This aggregation is performed for each of the 7807 peaks. Additional relevant variables in the final data frame used for analysis include peakflow, baseflow, surge, ROS classification, and the geographic location (i.e., longitude and latitude) of the streamgage at which peak occurrence is observed. Overall, there are 49 variables associated with each peak observation. A list of all variables and the summaries applied to the weather variables is available in
Table 4.
The final dataset connects weather measurements to streamflow surges through HUC association to establish spatial dependencies, allowing us to meaningfully investigate streamflow response to weather behavior. It also contains information about ROS classification for each peak, which provides us with not only a better understanding of the characteristics of ROS-induced floods, but also a better understanding of the relationship between ROS and non-ROS floods and what distinguishes their behavior. The following section demonstrates an application of this dataset to model differences between ROS- and non-ROS-induced stream surges.
2.6. Model Selection and Tuning
We create generalized additive models (GAMs) for representing stream surge with the intent to provide a more accurate and stable indicator of stream surge differences while controlling for location-specific anomalies. GAMs are an adaptation of a linear model that permits nonlinearity in the prediction of the response variable through the use of data-driven smoothing functions [
32]. Due to the highly skewed distribution of surge measurements, we elect to use the log of surge as our response variable.
As an initial step in the modeling process, we determine which of the 37 eligible explanatory variables from the peak dataset are the most important in predicting log-surge through a combination of tests for statistical significance and practical viability. For example, we remove SM percentage measurements from consideration for practical purposes since over 80 percent of peak observations report it as missing. The remaining variables are selected based on their significance and explanatory power, as determined through the manual addition and removal of variables from the candidate models. The initially retained variables for modeling log-surge are summarized in
Table 5.
In order to introduce the mathematical representation of the simplified GAMs, let
u and
v be vectors representing a collection of one or more geographic coordinates in (longitude, latitude) format. Further, let
u correspond to the geographic location of the streamgage measuring the
ith surge and
correspond to the unique geographic location of the
jth SNOTEL station located in the same HUC region as the related streamgage. Let
be the vector of length
j containing mean SWE measurements at multiple SNOTEL stations (with locations
) for the 5 days prior to peak occurrence in the relevant HUC region (
). Since there are often multiple SNOTEL stations within a HUC region, we summarize over
by finding the median, represented by the superscript (
m), of the mean SWE measurements from all
j SNOTEL stations. Finally, let
i indicate the index of the surge in our dataset of flood peaks that this value is calculated for. For example,
represents the median of the mean SWE for a particular stream surge measured at a stream gage in watershed
. We use similar notation for median Temp (
), mean SD (
), and maximum Precip (
). The remaining explanatory variables, including baseflow (
) and the geographic location of the gage (
u), are derived from streamgage rather than SNOTEL stations and require no statistical summary prior to inclusion in the model.
Let
denote the default smoothing functions used in our model that employ penalized thin plate regression splines [
33]. Additionally, let
represent isotropic second-order splines on the sphere for modeling any marginal geographic effects [
34]. Equation (
4) represents our final GAM post the variable selection described in
Section 3.
4. Conclusions
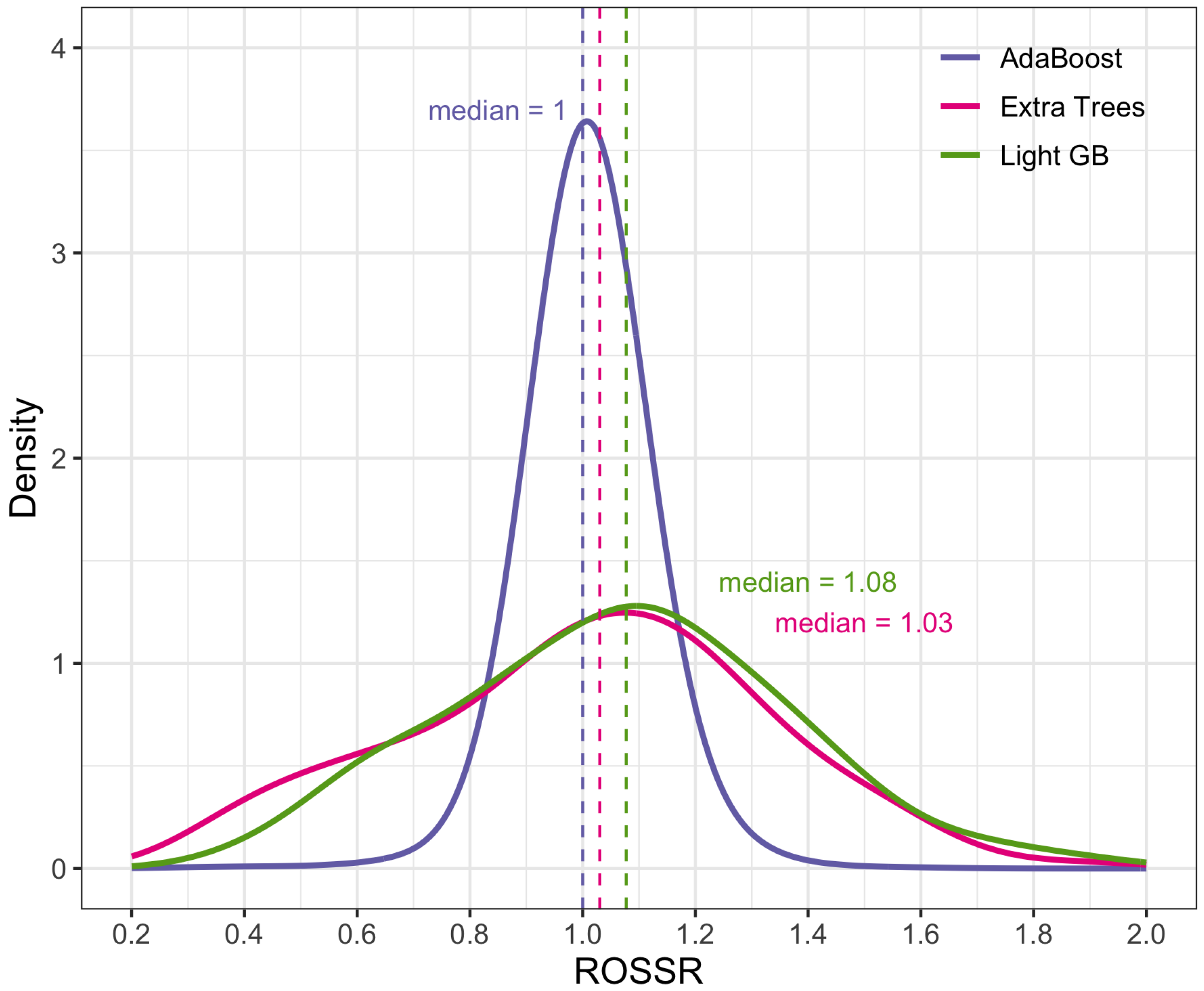
This paper presented a novel approach to quantifying the impact of ROS events on surges in streamflow relative to non-ROS-induced stream surges. This process required the development of a data workflow that automatically identified surges in streamflow and paired them to the snowpack, temperature, and precipitation conditions preceding the surge at nearby SNOTEL stations. The creation of this dataset allowed us to model the direct impacts of ROS weather events on streamflow response using GAMs and ML models, which suggested that ROS-induced stream surges tend to be 3–20 percent larger than non-ROS-induced stream surges.
One potential area of future work includes researching alternative methods to those used in this study for imputing flood stage thresholds not reported by the USGS. Additionally, we hypothesized an explanation for the marginal effects shown for the spatial terms in our GAMs in
Figure 9, but a more in-depth investigation should examine more precise reasoning behind these spatial patterns. Further, the construction of non-ROS streamgage profiles should be further developed to determine potential variations on ROSSR results. Another area for future work, as mentioned previously in this paper, would be to replace SNOTEL measurements with gridded snow data such as SNODAS [
30]. This would allow the analysis to be expanded to include non-mountainous regions. Additionally, future work should consider the impacts of vegetation and landscape characteristics on streamflow response to ROS events by incorporating data sources that provide that information.
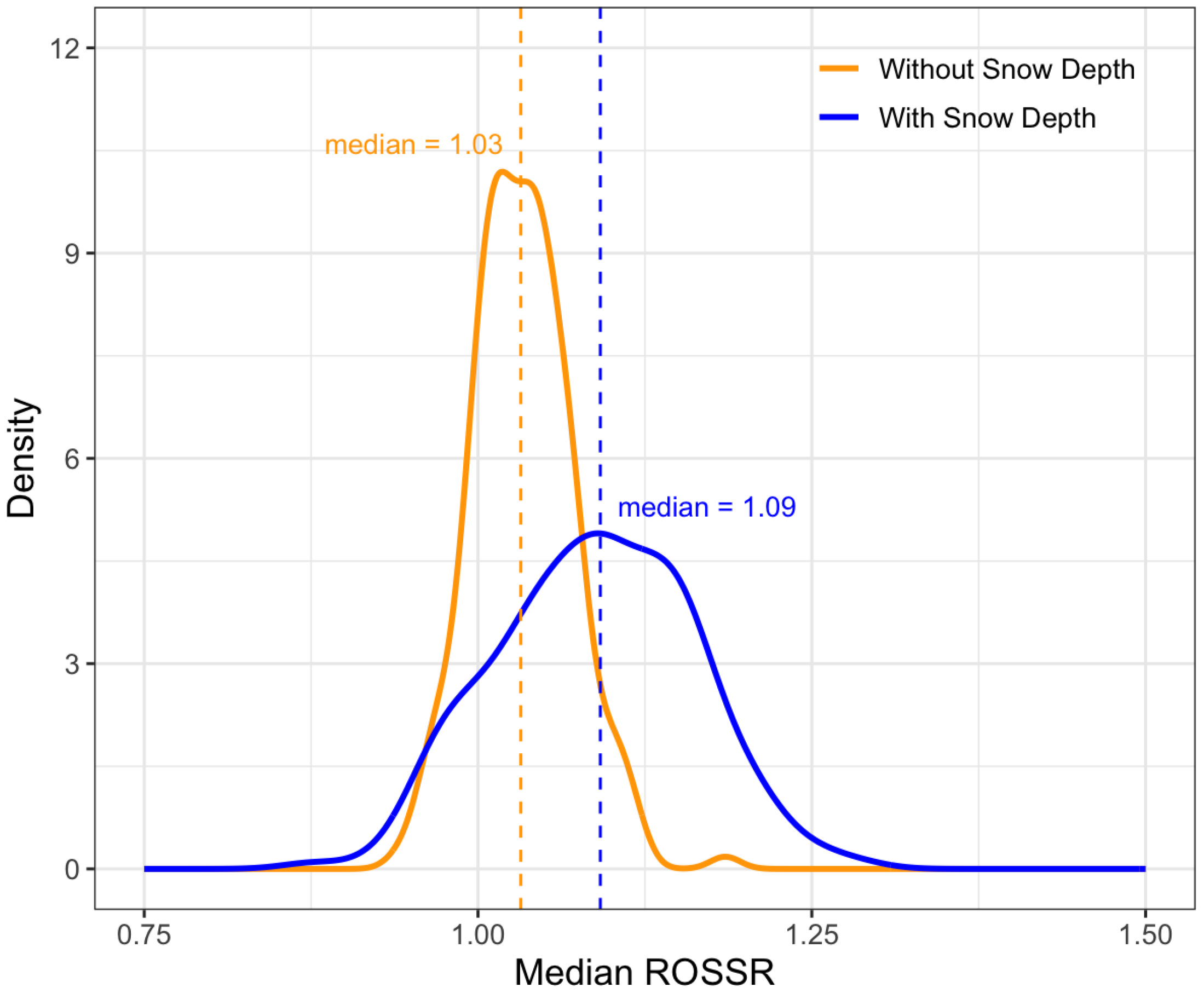
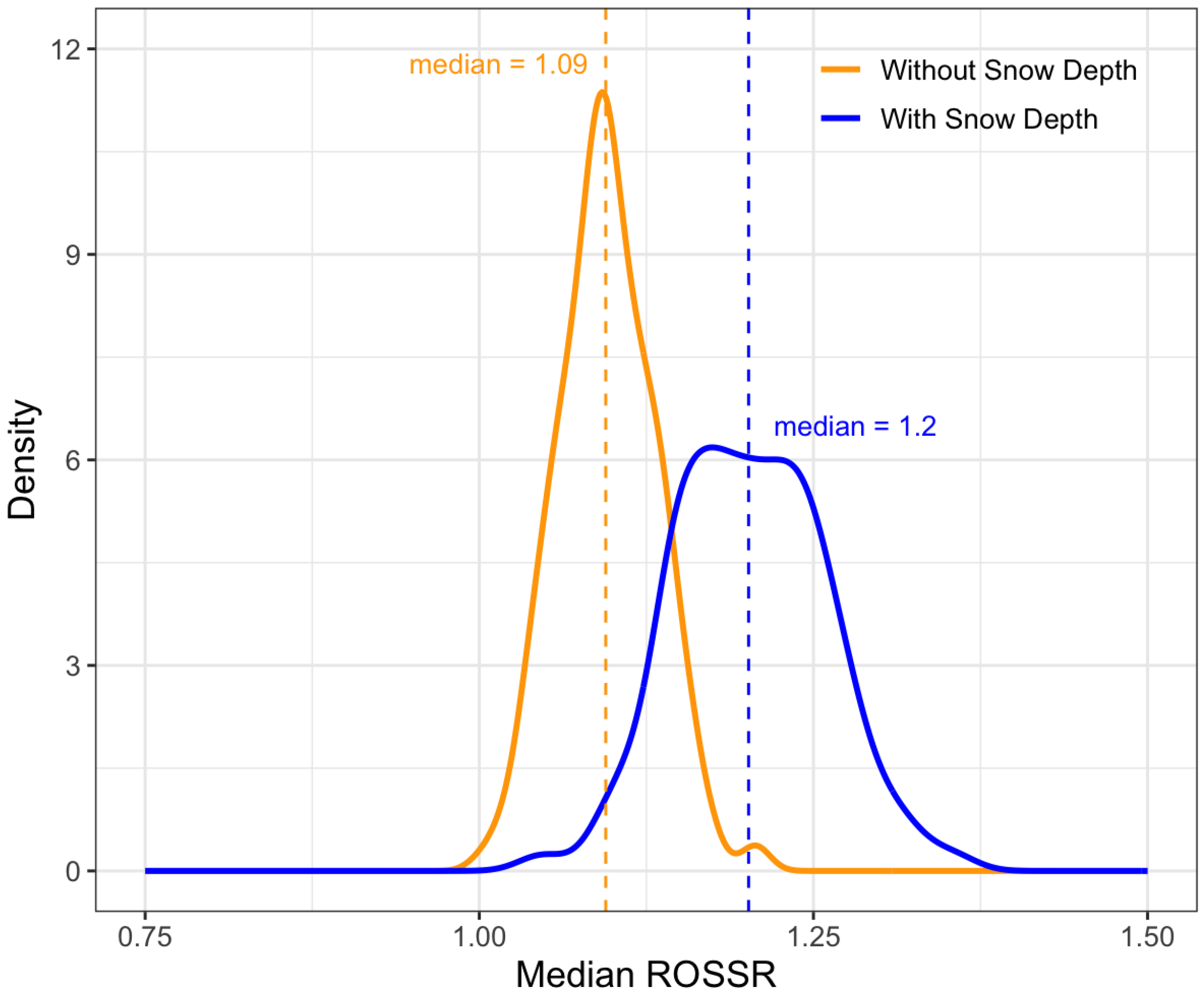
Despite these opportunities for improvement, the adjustment factor we propose based on the dataset we created has the potential to benefit hydrologic design. For example, engineers can use our unitless flow adjustment factors (e.g., 1.03–1.2) to conservatively adjust design flow calculations in areas where ROS is expected to be an issue within the geographical limits of our study area, which is the western Continental United States. Additionally, the dataset and software described in this paper, made freely available online, facilitate exploration of the relationship between ROS events and streamflow data in areas outside of our study area.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}