
Flood Forecasting Using Hybrid LSTM and GRU Models with Lag Time Preprocessing





Abstract
:1. Introduction
1.1. The Flood Prediction Models and Lag Time Preprocessing
1.2. Contribution
2. Materials and Methods
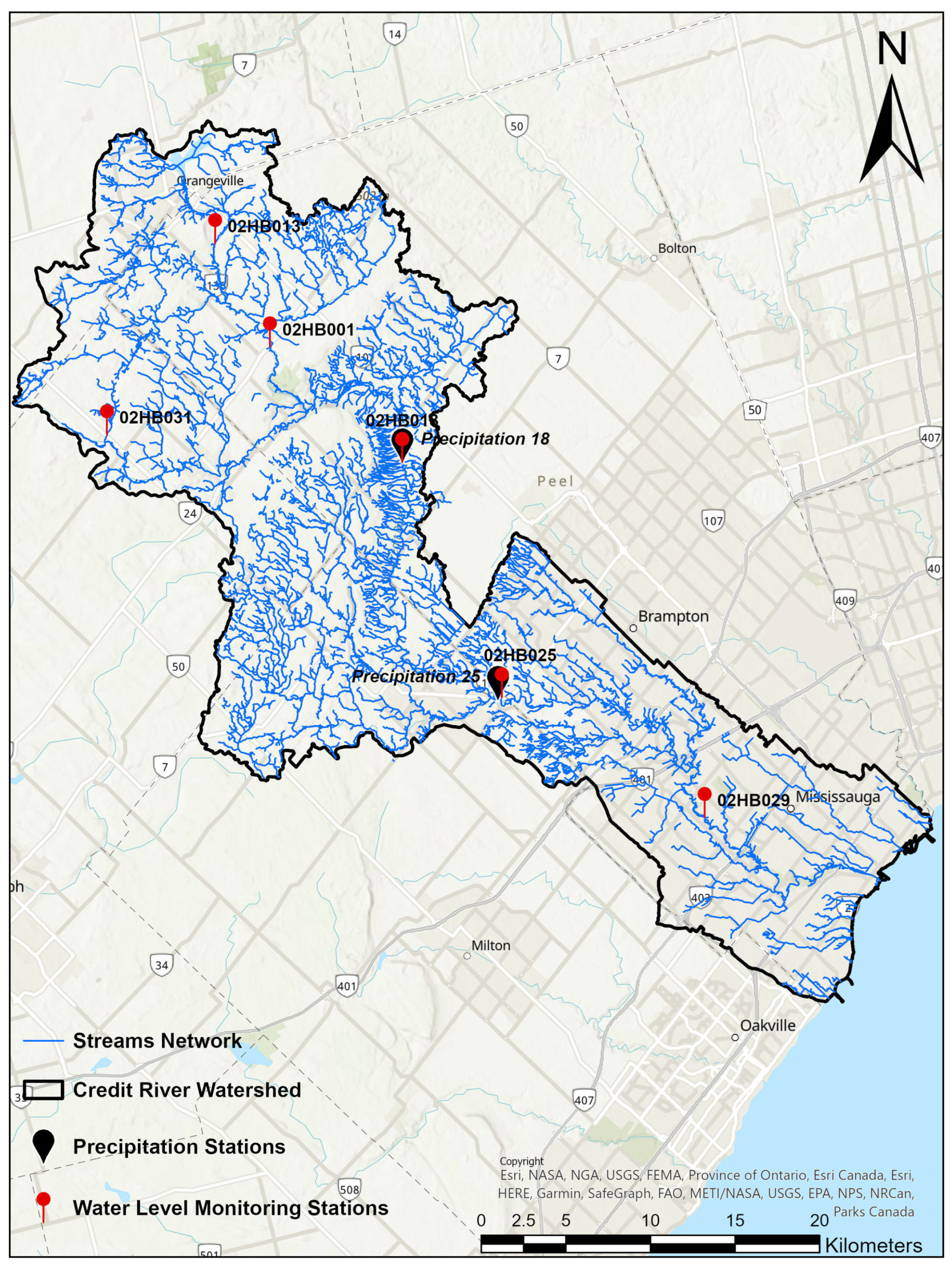
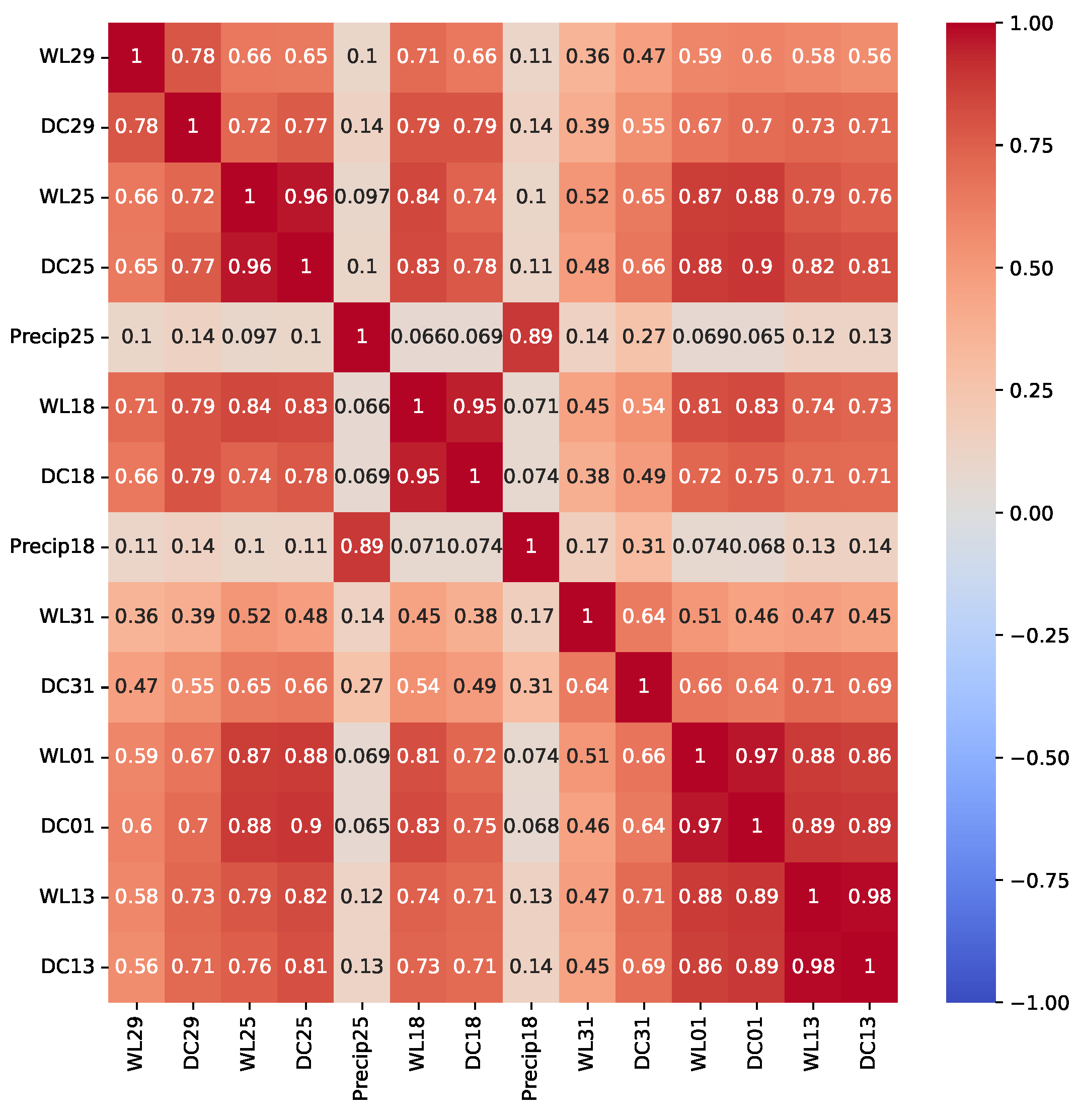
2.1. The Correlation of Water Level, Discharge and Precipitation
2.2. The Water Level Lag Time between Each Station
2.3. Theoretical Background of the Models and Performance Metrics
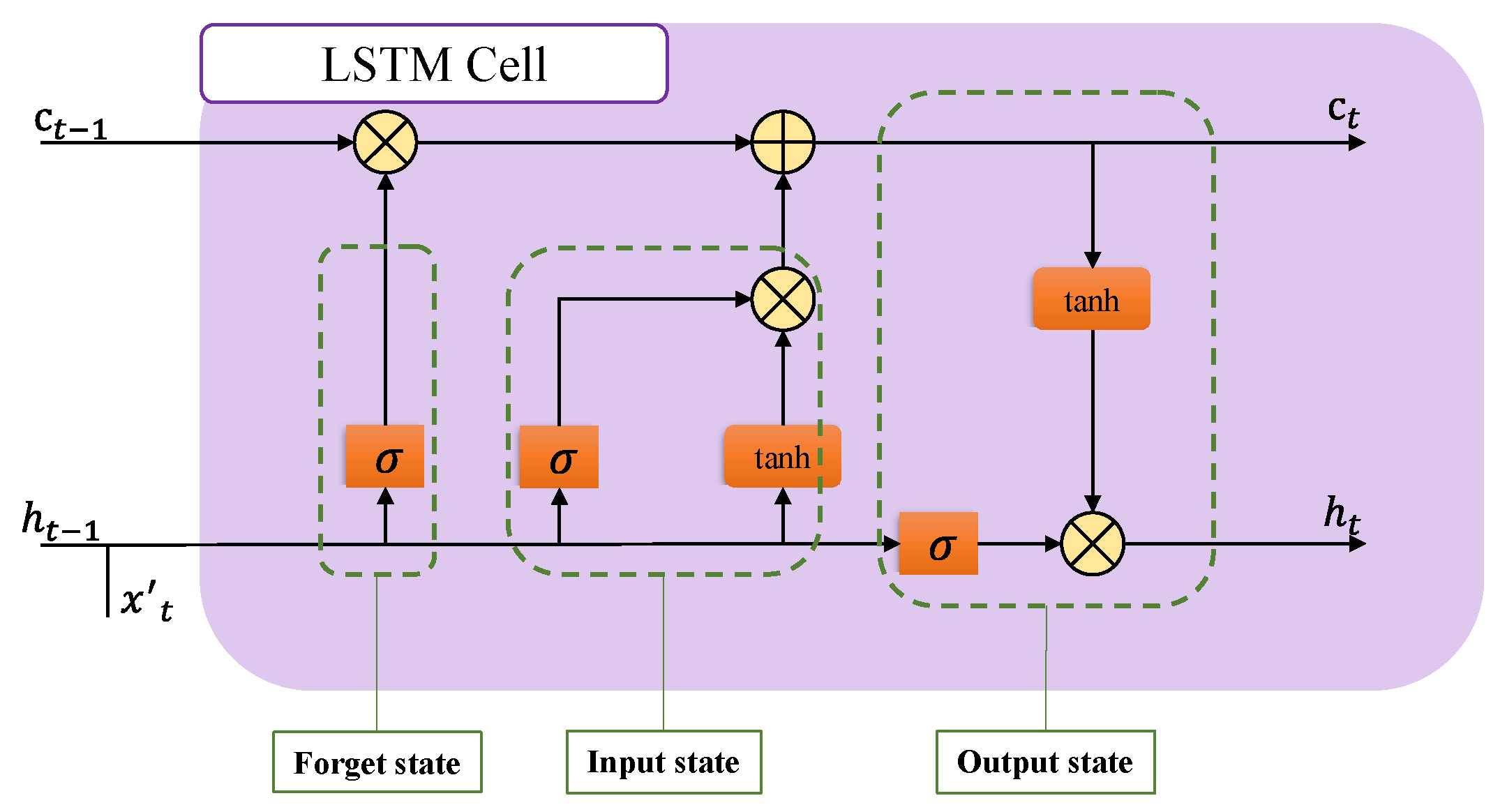
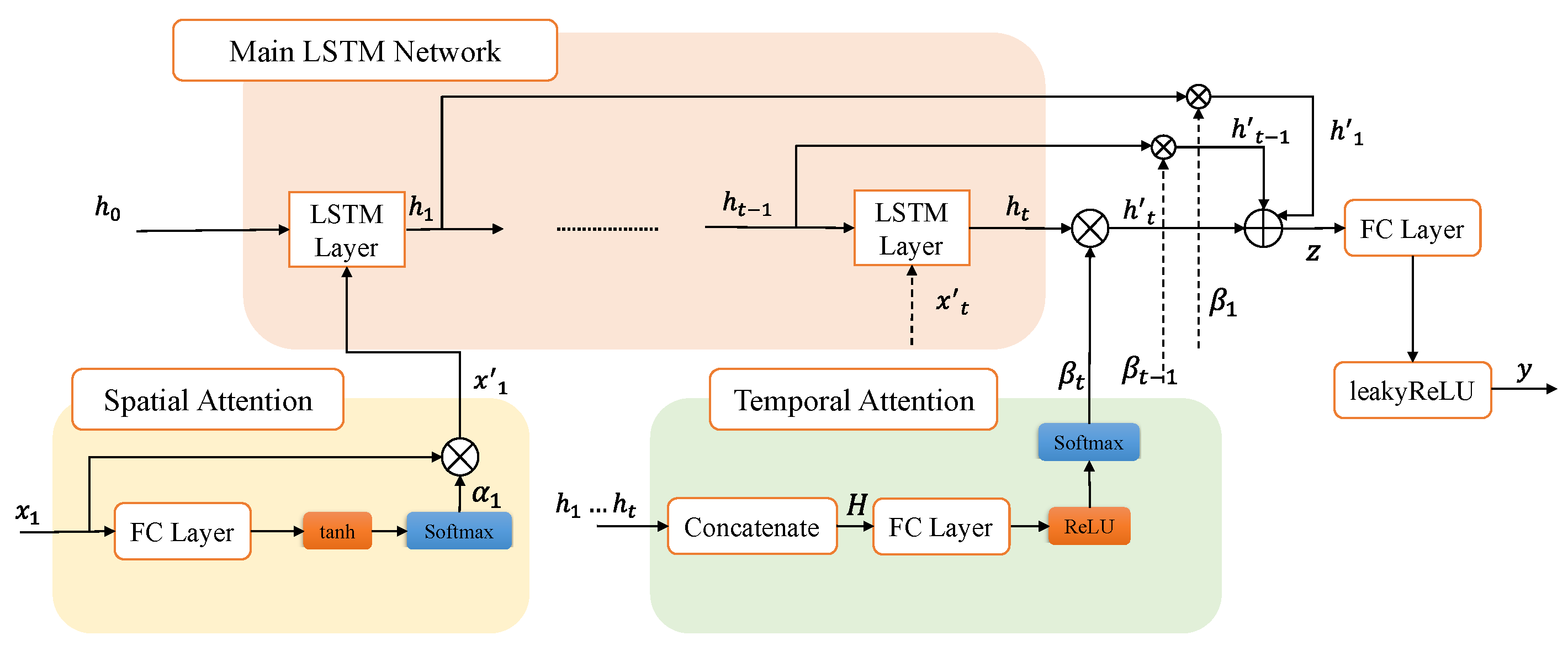
2.3.1. STA-LSTM Model
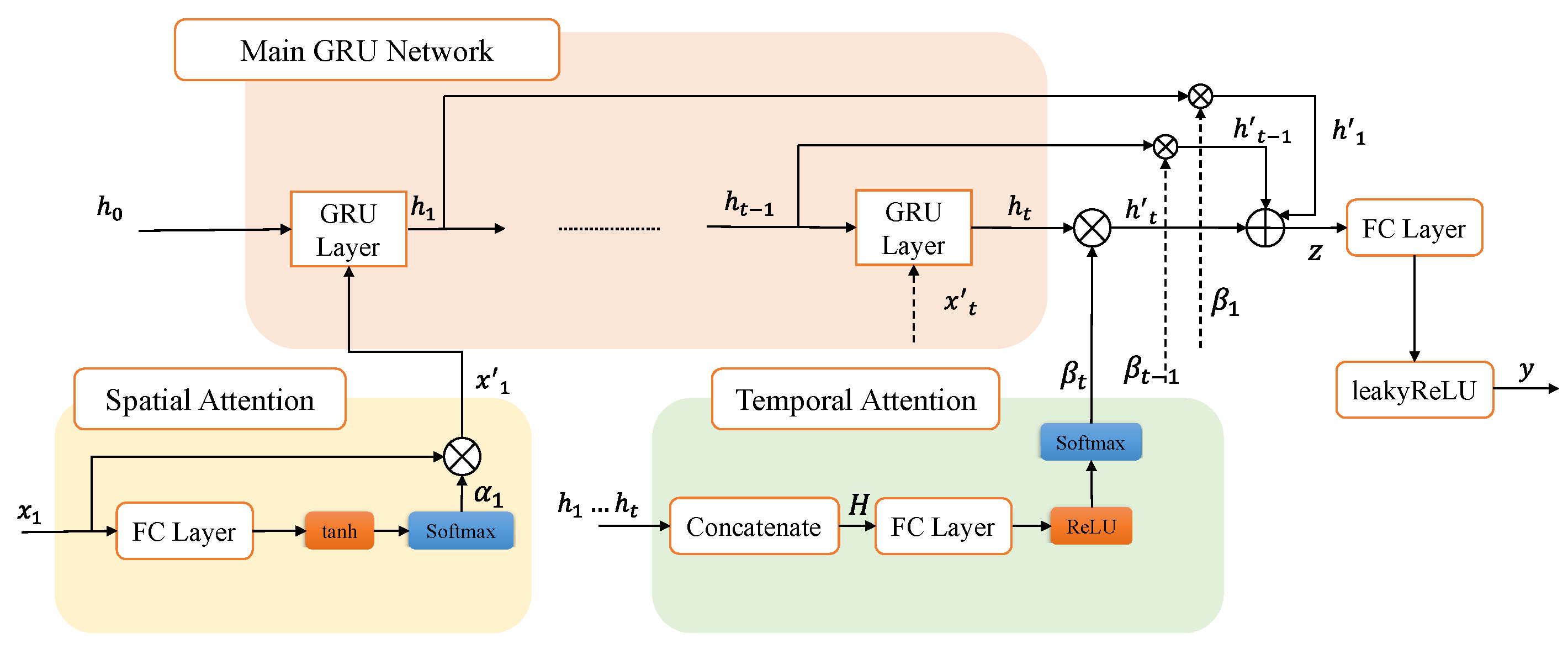
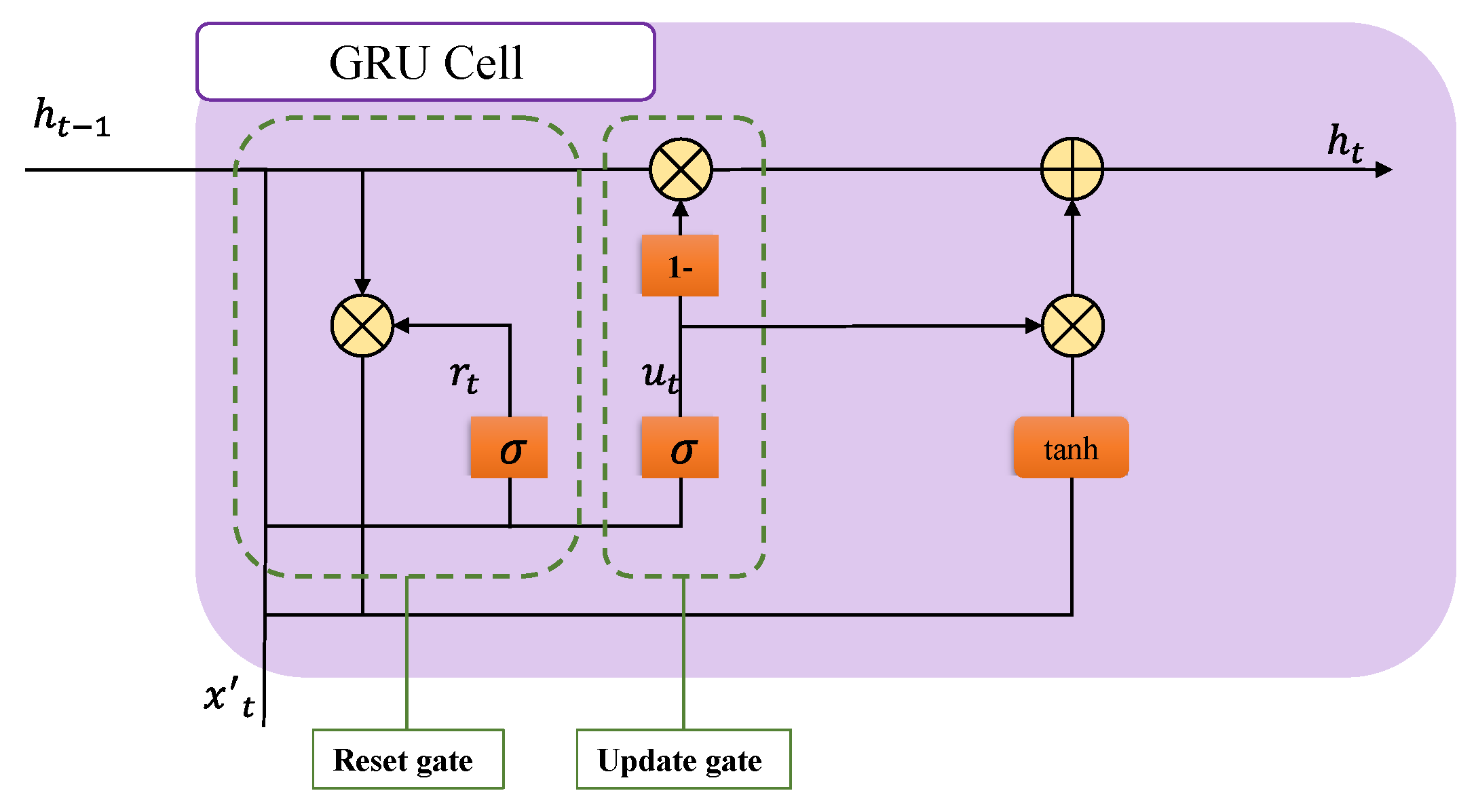
2.3.2. STA-GRU Model
2.4. Performance Metrics
- RMSE emphasizes large errors by squaring the differences, making the model sensitive to significant deviations in predicting flood quantities, thus ensuring robustness and accuracy. The formula of RMSE is given aswhere is the observation value, is the prediction value, and n is the number of observations/predictions.
- MAE assigns equal weight to each error, aiding in evaluating the model’s average predictive precision in general scenarios. The MAE can be represented by the following equation
- R-square offers a measure of how well the model explains the variability in flood flow, where higher R-square values indicate better capability to account for observed fluctuations, enhancing the model’s interpretability and reliability. R-square is defined bywhere is the average of the observation value.
3. Results and Discussion
3.1. Description of Validation Case
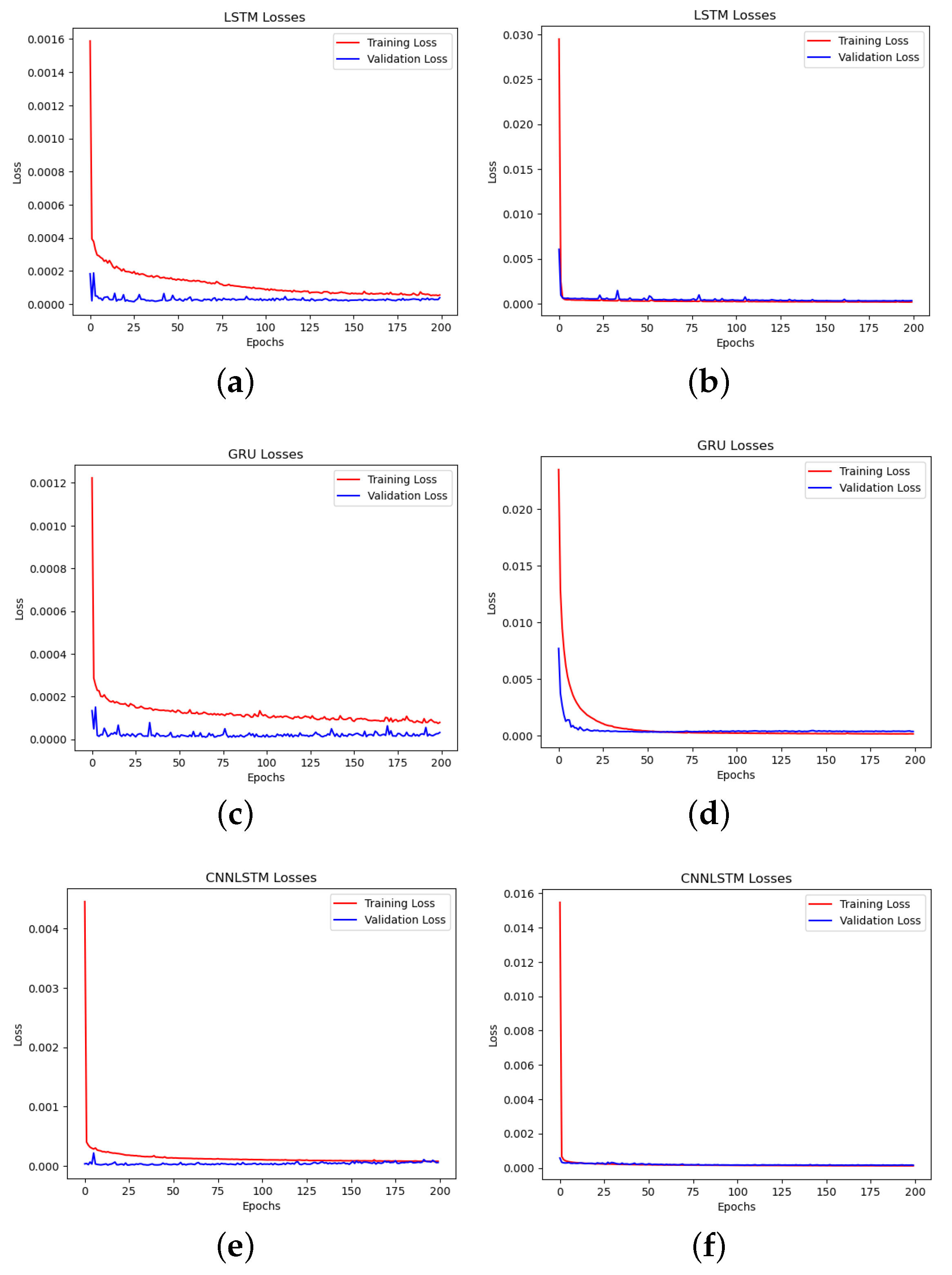
3.2. Discussion of Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jalili Pirani, F.; Najafi, M.R. Multivariate analysis of compound flood hazard across Canada’s Atlantic, Pacific and Great Lakes coastal areas. Earths Future 2022, 10, e2022EF002655. [Google Scholar] [CrossRef]
- Lin, H.; Mo, R.; Vitart, F.; Stan, C. Eastern Canada flooding 2017 and its subseasonal predictions. Atmosphere-Ocean 2019, 57, 195–207. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Bonakdari, H. A reliable hybrid outlier robust non-tuned rapid machine learning model for multi-step ahead flood forecasting in Quebec, Canada. J. Hydrol. 2022, 614, 128592. [Google Scholar] [CrossRef]
- Zadeh, S.M.; Burn, D.H.; O’Brien, N. Detection of trends in flood magnitude and frequency in Canada. J. Hydrol. Reg. Stud. 2020, 28, 100673. [Google Scholar] [CrossRef]
- Taraky, Y.M.; Liu, Y.; McBean, E.; Daggupati, P.; Gharabaghi, B. Flood risk management with transboundary conflict and cooperation dynamics in the Kabul River Basin. Water 2021, 13, 1513. [Google Scholar] [CrossRef]
- Burn, D.H.; Whitfield, P.H. Changes in floods and flood regimes in Canada. Can. Water Resour. J./Revue Can. Resour. Hydriques 2016, 41, 139–150. [Google Scholar] [CrossRef]
- Saurav, K.; Shrestha, S.; Ninsawat, S.; Chonwattana, S. Predicting flood events in Kathmandu Metropolitan City under climate change and urbanisation. J. Environ. Manag. 2021, 281, 111894. [Google Scholar]
- Lin, J.; Zhang, W.; Wen, Y.; Qiu, S. Evaluating the association between morphological characteristics of urban land and pluvial floods using machine learning methods. Sustain. Cities Soc. 2023, 99, 104891. [Google Scholar] [CrossRef]
- Ward, P.J.; de Ruiter, M.C.; Mård, J.; Schröter, K.; Van Loon, A.; Veldkamp, T.; von Uexkull, N.; Wanders, N.; AghaKouchak, A.; Arnbjerg-Nielsen, K.; et al. The need to integrate flood and drought disaster risk reduction strategies. Water Secur. 2020, 11, 100070. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Fox, D.; Dang, D.K.; Pham, L.T.; Viet Du, Q.V.; Nguyen, T.H.T.; Dang, T.N.; Tran, V.T.; Vu, P.L.; Nguyen, Q.H.; et al. Predicting future urban flood risk using land change and hydraulic modeling in a river watershed in the central Province of Vietnam. Remote. Sens. 2021, 13, 262. [Google Scholar] [CrossRef]
- Kumar, V.; Azamathulla, H.M.; Sharma, K.V.; Mehta, D.J.; Maharaj, K.T. The state of the art in deep learning applications, challenges, and future prospects: A comprehensive review of flood forecasting and management. Sustainability 2023, 15, 10543. [Google Scholar] [CrossRef]
- Bubeck, P.; Otto, A.; Weichselgartner, J. Societal impacts of flood hazards. In Oxford Research Encyclopedia of Natural Hazard Science; Oxford University Press: Oxford, UK, 2017. [Google Scholar]
- Shah, A.A.; Ajiang, C.; Gong, Z.; Khan, N.A.; Ali, M.; Ahmad, M.; Abbas, A.; Shahid, A. Reconnoitering school children vulnerability and its determinants: Evidence from flood disaster-hit rural communities of Pakistan. Int. J. Disaster Risk Reduct. 2022, 70, 102735. [Google Scholar] [CrossRef]
- Jonkman, S.N. Global perspectives on loss of human life caused by floods. Nat. Hazards 2005, 34, 151–175. [Google Scholar] [CrossRef]
- Emerton, R.E.; Stephens, E.M.; Pappenberger, F.; Pagano, T.C.; Weerts, A.H.; Wood, A.W.; Salamon, P.; Brown, J.D.; Hjerdt, N.; Donnelly, C.; et al. Continental and global scale flood forecasting systems. Wiley Interdiscip. Rev. Water 2016, 3, 391–418. [Google Scholar] [CrossRef]
- Cloke, H.L.; Pappenberger, F. Ensemble flood forecasting: A review. J. Hydrol. 2009, 375, 613–626. [Google Scholar] [CrossRef]
- Moore, R. Real-time flood forecasting systems: Perspectives and prospects. Floods Landslides Integr. Risk Assess. 1999, 147–189. [Google Scholar]
- Acharya, A.; Prakash, A. When the river talks to its people: Local knowledge-based flood forecasting in Gandak River basin, India. Environ. Dev. 2019, 31, 55–67. [Google Scholar] [CrossRef]
- Kaur, B.; Szentimrey, Z.; Binns, A.D.; McBean, E.A.; Gharabaghi, B. Urban flood susceptibility mapping using supervised regression and machine learning models in Toronto, Canada. In Proceedings of the AGU Fall Meeting Abstracts, Online, 17 December 2020; Volume 2020, p. NH012-07. [Google Scholar]
- Borga, M.; Anagnostou, E.; Blöschl, G.; Creutin, J.D. Flash flood forecasting, warning and risk management: The HYDRATE project. Environ. Sci. Policy 2011, 14, 834–844. [Google Scholar] [CrossRef]
- Nauman, C.; Anderson, E.; Coughlan de Perez, E.; Kruczkiewicz, A.; McClain, S.; Markert, A.; Griffin, R.; Suarez, P. Perspectives on flood forecast-based early action and opportunities for Earth observations. J. Appl. Remote. Sens. 2021, 15, 032002. [Google Scholar] [CrossRef]
- Lawford, R.; Prowse, T.; Hogg, W.; Warkentin, A.; Pilon, P. Hydrometeorological aspects of flood hazards in Canada. Atmosphere-Ocean 1995, 33, 303–328. [Google Scholar] [CrossRef]
- Alfieri, L.; Salamon, P.; Pappenberger, F.; Wetterhall, F.; Thielen, J. Operational early warning systems for water-related hazards in Europe. Environ. Sci. Policy 2012, 21, 35–49. [Google Scholar] [CrossRef]
- Merz, B.; Kuhlicke, C.; Kunz, M.; Pittore, M.; Babeyko, A.; Bresch, D.N.; Domeisen, D.I.; Feser, F.; Koszalka, I.; Kreibich, H.; et al. Impact forecasting to support emergency management of natural hazards. Rev. Geophys. 2020, 58, e2020RG000704. [Google Scholar] [CrossRef]
- Jain, S.K.; Mani, P.; Jain, S.K.; Prakash, P.; Singh, V.P.; Tullos, D.; Kumar, S.; Agarwal, S.; Dimri, A. A Brief review of flood forecasting techniques and their applications. Int. J. River Basin Manag. 2018, 16, 329–344. [Google Scholar] [CrossRef]
- Kim, G.; Barros, A.P. Quantitative flood forecasting using multisensor data and neural networks. J. Hydrol. 2001, 246, 45–62. [Google Scholar] [CrossRef]
- Brocca, L.; Melone, F.; Moramarco, T. Distributed rainfall-runoff modelling for flood frequency estimation and flood forecasting. Hydrol. Process. 2011, 25, 2801–2813. [Google Scholar] [CrossRef]
- Toth, E.; Brath, A.; Montanari, A. Comparison of short-term rainfall prediction models for real-time flood forecasting. J. Hydrol. 2000, 239, 132–147. [Google Scholar] [CrossRef]
- Hapuarachchi, H.; Wang, Q.; Pagano, T. A review of advances in flash flood forecasting. Hydrol. Process. 2011, 25, 2771–2784. [Google Scholar] [CrossRef]
- Yin, D.; Xue, Z.G.; Bao, D.; RafieeiNasab, A.; Huang, Y.; Morales, M.; Warner, J.C. Understanding the role of initial soil moisture and precipitation magnitude in flood forecast using a hydrometeorological modelling system. Hydrol. Process. 2022, 36, e14710. [Google Scholar] [CrossRef]
- Li, Y.; Grimaldi, S.; Walker, J.P.; Pauwels, V.R. Application of remote sensing data to constrain operational rainfall-driven flood forecasting: A review. Remote. Sens. 2016, 8, 456. [Google Scholar] [CrossRef]
- Piadeh, F.; Behzadian, K.; Alani, A.M. A critical review of real-time modelling of flood forecasting in urban drainage systems. J. Hydrol. 2022, 607, 127476. [Google Scholar] [CrossRef]
- Taraky, Y.M.; Liu, Y.; Gharabaghi, B.; McBean, E.; Daggupati, P.; Shrestha, N.K. Influence of headwater reservoirs on climate change impacts and flood frequency in the Kabul River Basin. Can. J. Civ. Eng. 2022, 49, 1300–1309. [Google Scholar] [CrossRef]
- Oruh, J.; Viriri, S.; Adegun, A. Long short-term memory recurrent neural network for automatic speech recognition. IEEE Access 2022, 10, 30069–30079. [Google Scholar] [CrossRef]
- Li, W.; Kiaghadi, A.; Dawson, C. Exploring the best sequence LSTM modeling architecture for flood prediction. Neural Comput. Appl. 2021, 33, 5571–5580. [Google Scholar] [CrossRef]
- Kumar, A.; Bhatia, A.; Kashyap, A.; Kumar, M. LSTM Network: A Deep Learning Approach and Applications. In Advanced Applications of NLP and Deep Learning in Social Media Data; IGI Global: Hershey, PA, USA, 2023; pp. 130–150. [Google Scholar]
- Iparraguirre-Villanueva, O.; Guevara-Ponce, V.; Ruiz-Alvarado, D.; Beltozar-Clemente, S.; Sierra-Liñan, F.; Zapata-Paulini, J.; Cabanillas-Carbonell, M. Text prediction recurrent neural networks using long short-term memory-dropout. Indones. J. Electr. Eng. Comput. Sci. 2023, 29, 1758–1768. [Google Scholar] [CrossRef]
- Hayder, I.M.; Al-Amiedy, T.A.; Ghaban, W.; Saeed, F.; Nasser, M.; Al-Ali, G.A.; Younis, H.A. An Intelligent Early Flood Forecasting and Prediction Leveraging Machine and Deep Learning Algorithms with Advanced Alert System. Processes 2023, 11, 481. [Google Scholar] [CrossRef]
- Granata, F.; Di Nunno, F. Neuroforecasting of daily streamflows in the UK for short-and medium-term horizons: A novel insight. J. Hydrol. 2023, 624, 129888. [Google Scholar] [CrossRef]
- Le, X.H.; Ho, H.V.; Lee, G.; Jung, S. Application of long short-term memory (LSTM) neural network for flood forecasting. Water 2019, 11, 1387. [Google Scholar] [CrossRef]
- Boopathi, S. Deep Learning Techniques Applied for Automatic Sentence Generation. In Promoting Diversity, Equity, and Inclusion in Language Learning Environments; IGI Global: Hershey, PA, USA, 2023; pp. 255–273. [Google Scholar]
- Tabrizi, S.E.; Xiao, K.; Thé, J.V.G.; Saad, M.; Farghaly, H.; Yang, S.X.; Gharabaghi, B. Hourly road pavement surface temperature forecasting using deep learning models. J. Hydrol. 2021, 603, 126877. [Google Scholar] [CrossRef]
- Li, J.; Yuan, X. Daily Streamflow Forecasts Based on Cascade Long Short-Term Memory (LSTM) Model over the Yangtze River Basin. Water 2023, 15, 1019. [Google Scholar] [CrossRef]
- Zou, Y.; Wang, J.; Lei, P.; Li, Y. A novel multi-step ahead forecasting model for flood based on time residual LSTM. J. Hydrol. 2023, 620, 129521. [Google Scholar] [CrossRef]
- Jia, P.; Cao, N.; Yang, S. Real-time hourly ozone prediction system for Yangtze River Delta area using attention based on a sequence to sequence model. Atmos. Environ. 2021, 244, 117917. [Google Scholar] [CrossRef]
- Zhang, Y.; Gu, Z.; Thé, J.V.G.; Yang, S.X.; Gharabaghi, B. The Discharge Forecasting of Multiple Monitoring Station for Humber River by Hybrid LSTM Models. Water 2022, 14, 1794. [Google Scholar] [CrossRef]
- Moishin, M.; Deo, R.C.; Prasad, R.; Raj, N.; Abdulla, S. Designing deep-based learning flood forecast model with ConvLSTM hybrid algorithm. IEEE Access 2021, 9, 50982–50993. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, Z.; Wang, D.; Wu, J.; Chen, L. An ensemble CNN-LSTM and GRU adaptive weighting model based improved sparrow search algorithm for predicting runoff using historical meteorological and runoff data as input. J. Hydrol. 2023, 625, 129977. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, Y.; Feng, J.; Zhang, P.; Cheng, Z. Interpretable spatiotemporal attention LSTM model for flood forecasting. Neurocomputing 2020, 403, 348–359. [Google Scholar] [CrossRef]
- Li, P.; Zhang, J.; Krebs, P. Prediction of flow based on a CNN-LSTM combined deep learning approach. Water 2022, 14, 993. [Google Scholar] [CrossRef]
- Khorram, S.; Jehbez, N. A Hybrid CNN-LSTM Approach for Monthly Reservoir Inflow Forecasting. Water Resour. Manag. 2023, 37, 4097–4121. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, Q.; Wu, C.; Zou, Q.; Yu, Y.; Yi, H.; Gao, M. A study on water quality prediction by a hybrid CNN-LSTM model with attention mechanism. Environ. Sci. Pollut. Res. 2021, 28, 55129–55139. [Google Scholar] [CrossRef]
- Dehghani, A.; Moazam, H.M.Z.H.; Mortazavizadeh, F.; Ranjbar, V.; Mirzaei, M.; Mortezavi, S.; Ng, J.L.; Dehghani, A. Comparative evaluation of LSTM, CNN, and ConvLSTM for hourly short-term streamflow forecasting using deep learning approaches. Ecol. Inform. 2023, 75, 102119. [Google Scholar] [CrossRef]
- Wu, Y.; Ding, Y.; Zhu, Y.; Feng, J.; Wang, S. Complexity to forecast flood: Problem definition and spatiotemporal attention LSTM solution. Complexity 2020, 2020, 7670382. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Y.; Chin, R.J.; Wang, C.; Wang, C. Long Short-Term Memory (LSTM) Based Model for Flood Forecasting in Xiangjiang River. KSCE J. Civ. Eng. 2023, 27, 5030–5040. [Google Scholar] [CrossRef]
- Shewalkar, A.; Nyavanandi, D.; Ludwig, S.A. Performance evaluation of deep neural networks applied to speech recognition: RNN, LSTM and GRU. J. Artif. Intell. Soft Comput. Res. 2019, 9, 235–245. [Google Scholar] [CrossRef]
- Gao, S.; Huang, Y.; Zhang, S.; Han, J.; Wang, G.; Zhang, M.; Lin, Q. Short-term runoff prediction with GRU and LSTM networks without requiring time step optimization during sample generation. J. Hydrol. 2020, 589, 125188. [Google Scholar] [CrossRef]
- Zhao, Z.; Yun, S.; Jia, L.; Guo, J.; Meng, Y.; He, N.; Li, X.; Shi, J.; Yang, L. Hybrid VMD-CNN-GRU-based model for short-term forecasting of wind power considering spatiotemporal features. Eng. Appl. Artif. Intell. 2023, 121, 105982. [Google Scholar] [CrossRef]
- Cho, M.; Kim, C.; Jung, K.; Jung, H. Water level prediction model applying a long short-term memory (lstm)–gated recurrent unit (gru) method for flood prediction. Water 2022, 14, 2221. [Google Scholar] [CrossRef]
- Pan, M.; Zhou, H.; Cao, J.; Liu, Y.; Hao, J.; Li, S.; Chen, C.H. Water level prediction model based on GRU and CNN. IEEE Access 2020, 8, 60090–60100. [Google Scholar] [CrossRef]
- Hua, G.; Wang, S.; Xiao, M.; Hu, S. Research on the Uplift Pressure Prediction of Concrete Dams Based on the CNN-GRU Model. Water 2023, 15, 319. [Google Scholar] [CrossRef]
- Hood, M.J.; Clausen, J.C.; Warner, G.S. Comparison of Stormwater lag times for low impact and traditional residential development 1. JAWRA J. Am. Water Resour. Assoc. 2007, 43, 1036–1046. [Google Scholar] [CrossRef]
- Gericke, O.; Smithers, J. Direct estimation of catchment response time parameters in medium to large catchments using observed streamflow data. Hydrol. Process. 2017, 31, 1125–1143. [Google Scholar] [CrossRef]
- Berne, A.; Delrieu, G.; Creutin, J.D.; Obled, C. Temporal and spatial resolution of rainfall measurements required for urban hydrology. J. Hydrol. 2004, 299, 166–179. [Google Scholar] [CrossRef]
- Perdikaris, J.; Gharabaghi, B.; Rudra, R. Reference time of concentration estimation for ungauged catchments. Earth Sci. Res 2018, 7, 58–73. [Google Scholar] [CrossRef]
- Langridge, M.; Gharabaghi, B.; McBean, E.; Bonakdari, H.; Walton, R. Understanding the dynamic nature of Time-to-Peak in UK streams. J. Hydrol. 2020, 583, 124630. [Google Scholar] [CrossRef]
- Seyam, M.; Othman, F. The influence of accurate lag time estimation on the performance of stream flow data-driven based models. Water Resour. Manag. 2014, 28, 2583–2597. [Google Scholar] [CrossRef]
- Adeyi, G.; Adigun, A.; Onyeocha, N.; Okeke, O. Unit hydrograph: Concepts, estimation methods and applications in hydrological sciences. Int. J. Eng. Sci. Comput. 2020, 10, 26211–26217. [Google Scholar]
- Barbero, G.; Costabile, P.; Costanzo, C.; Ferraro, D.; Petaccia, G. 2D hydrodynamic approach supporting evaluations of hydrological response in small watersheds: Implications for lag time estimation. J. Hydrol. 2022, 610, 127870. [Google Scholar] [CrossRef]
- Oliveira Santos, V.; Costa Rocha, P.A.; Scott, J.; Thé, J.V.G.; Gharabaghi, B. A New Graph-Based Deep Learning Model to Predict Flooding with Validation on a Case Study on the Humber River. Water 2023, 15, 1827. [Google Scholar] [CrossRef]
- Elkurdy, M.; Binns, A.D.; Bonakdari, H.; Gharabaghi, B.; McBean, E. Early detection of riverine flooding events using the group method of data handling for the Bow River, Alberta, Canada. Int. J. River Basin Manag. 2022, 20, 533–544. [Google Scholar] [CrossRef]
- Langridge, M.; McBean, E.; Bonakdari, H.; Gharabaghi, B. A dynamic prediction model for time-to-peak. Hydrol. Process. 2021, 35, e14032. [Google Scholar] [CrossRef]
- Soltani, K.; Ebtehaj, I.; Amiri, A.; Azari, A.; Gharabaghi, B.; Bonakdari, H. Mapping the spatial and temporal variability of flood susceptibility using remotely sensed normalized difference vegetation index and the forecasted changes in the future. Sci. Total. Environ. 2021, 770, 145288. [Google Scholar] [CrossRef]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of the 30th International Conference on International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; Volume 30, p. 3. [Google Scholar]
- Zhang, Y.; Pan, D.; Van Griensven, J.; Yang, S.X.; Gharabaghi, B. Intelligent flood forecasting and warning: A survey. Intell. Robot. 2023, 3, 190–212. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Model Name | Applicable to Spatiotemporal Data | Maximum Prediction Duration | Model Performance |
|---|---|---|---|---|
| Liu et al. (2023) [55] | RNN | No | 12 h | , |
| Dehghani et al. (2023) [53] | CNN | Yes | 6 h | ∼0.74 |
| Liu et al. (2023) [55] | LSTM | No | 12 h | |
| Dehghani et al. (2023) [53] | ConvLSTM | Yes | 6 h | ∼0.986 |
| Zhang et al. (2022) [46] | CNNLSTM | Yes | 24 h | |
| Zhang et al. (2022) [46], Ding et al. (2020) [49] | STA-LSTM | Yes | 24 h | ∼0.96 |
| Station No. | Average Lag Time (h) | Euclidean Distance (km) |
|---|---|---|
| 02HB025 | 5 | 13.9 |
| 02HB018 | 7 | 27.6 |
| 02HB001 | 8 | 37.9 |
| 02HB031 | 9 | 41.9 |
| 02HB013 | 12 | 44.7 |
| Hourly | Algorithm | RMSE | MAE | |
|---|---|---|---|---|
| 6 | LSTM | 0.0623 | 0.0309 | 0.9001 |
| 6 | GRU | 0.0589 | 0.0278 | 0.9107 |
| 6 | CNNLSTM | 0.0620 | 0.0292 | 0.9012 |
| 6 | CNNGRU | 0.0573 | 0.0275 | 0.9158 |
| 6 | ConvLSTM | 0.0513 | 0.0243 | 0.9323 |
| 6 | STA-LSTM | 0.0503 | 0.0229 | 0.9385 |
| 6 | STA-GRU | 0.0464 | 0.0228 | 0.9445 |
| 12 | LSTM | 0.0939 | 0.0435 | 0.7734 |
| 12 | GRU | 0.0911 | 0.0431 | 0.7865 |
| 12 | CNNLSTM | 0.0954 | 0.0481 | 0.7660 |
| 12 | CNNGRU | 0.0931 | 0.0433 | 0.7780 |
| 12 | ConvLSTM | 0.0864 | 0.0408 | 0.8080 |
| 12 | STA-LSTM | 0.0833 | 0.0407 | 0.8106 |
| 12 | STA-GRU | 0.0832 | 0.0405 | 0.8125 |
| 24 | LSTM | 0.1332 | 0.0757 | 0.5461 |
| 24 | GRU | 0.1255 | 0.0658 | 0.5971 |
| 24 | CNNLSTM | 0.1322 | 0.0673 | 0.5528 |
| 24 | CNNGRU | 0.1262 | 0.0652 | 0.5925 |
| 24 | ConvLSTM | 0.1241 | 0.0641 | 0.6061 |
| 24 | STA-LSTM | 0.1227 | 0.0631 | 0.6143 |
| 24 | STA-GRU | 0.1220 | 0.0625 | 0.6181 |
| Hourly | Algorithm | RMSE | MAE | |
|---|---|---|---|---|
| 6 | LSTM | 0.0456 | 0.0243 | 0.9466 |
| 6 | GRU | 0.0520 | 0.0290 | 0.9304 |
| 6 | CNNLSTM | 0.0482 | 0.0299 | 0.9402 |
| 6 | CNNGRU | 0.0499 | 0.0272 | 0.9359 |
| 6 | ConvLSTM | 0.0405 | 0.0213 | 0.9578 |
| 6 | STA-LSTM | 0.0399 | 0.0203 | 0.9590 |
| 6 | STA-GRU | 0.0382 | 0.0199 | 0.9646 |
| 12 | LSTM | 0.0644 | 0.0353 | 0.8935 |
| 12 | GRU | 0.0643 | 0.0351 | 0.8936 |
| 12 | CNNLSTM | 0.0677 | 0.0372 | 0.8821 |
| 12 | CNNGRU | 0.0652 | 0.0324 | 0.8907 |
| 12 | ConvLSTM | 0.0631 | 0.0332 | 0.8974 |
| 12 | STA-LSTM | 0.0553 | 0.0318 | 0.9214 |
| 12 | STA-GRU | 0.0526 | 0.0291 | 0.9288 |
| 24 | LSTM | 0.1165 | 0.0600 | 0.6525 |
| 24 | GRU | 0.1150 | 0.0607 | 0.6637 |
| 24 | CNNLSTM | 0.1178 | 0.0575 | 0.6453 |
| 24 | CNNGRU | 0.1154 | 0.0569 | 0.6592 |
| 24 | ConvLSTM | 0.1134 | 0.0550 | 0.6713 |
| 24 | STA-LSTM | 0.1052 | 0.0548 | 0.7164 |
| 24 | STA-GRU | 0.1039 | 0.0534 | 0.7232 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhou, Z.; Van Griensven Thé, J.; Yang, S.X.; Gharabaghi, B. Flood Forecasting Using Hybrid LSTM and GRU Models with Lag Time Preprocessing. Water 2023, 15, 3982. https://doi.org/10.3390/w15223982
Zhang Y, Zhou Z, Van Griensven Thé J, Yang SX, Gharabaghi B. Flood Forecasting Using Hybrid LSTM and GRU Models with Lag Time Preprocessing. Water. 2023; 15(22):3982. https://doi.org/10.3390/w15223982
Chicago/Turabian StyleZhang, Yue, Zimo Zhou, Jesse Van Griensven Thé, Simon X. Yang, and Bahram Gharabaghi. 2023. "Flood Forecasting Using Hybrid LSTM and GRU Models with Lag Time Preprocessing" Water 15, no. 22: 3982. https://doi.org/10.3390/w15223982
APA StyleZhang, Y., Zhou, Z., Van Griensven Thé, J., Yang, S. X., & Gharabaghi, B. (2023). Flood Forecasting Using Hybrid LSTM and GRU Models with Lag Time Preprocessing. Water, 15(22), 3982. https://doi.org/10.3390/w15223982