

Evaluation of a Tilt-Based Monitoring System for Rainfall-Induced Landslides: Development and Physical Modelling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
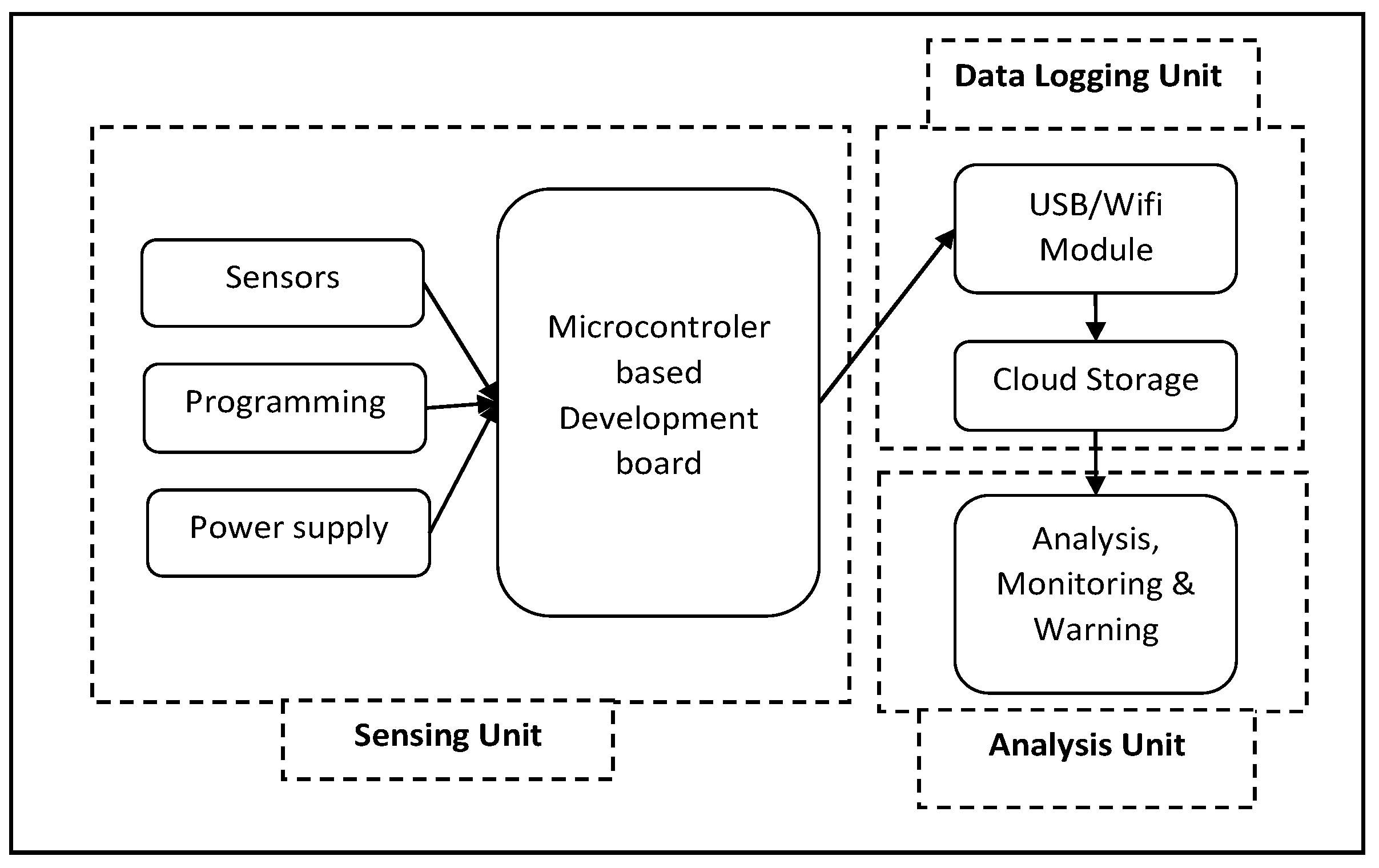
2. System Design and Implementation
2.1. Sensing Unit
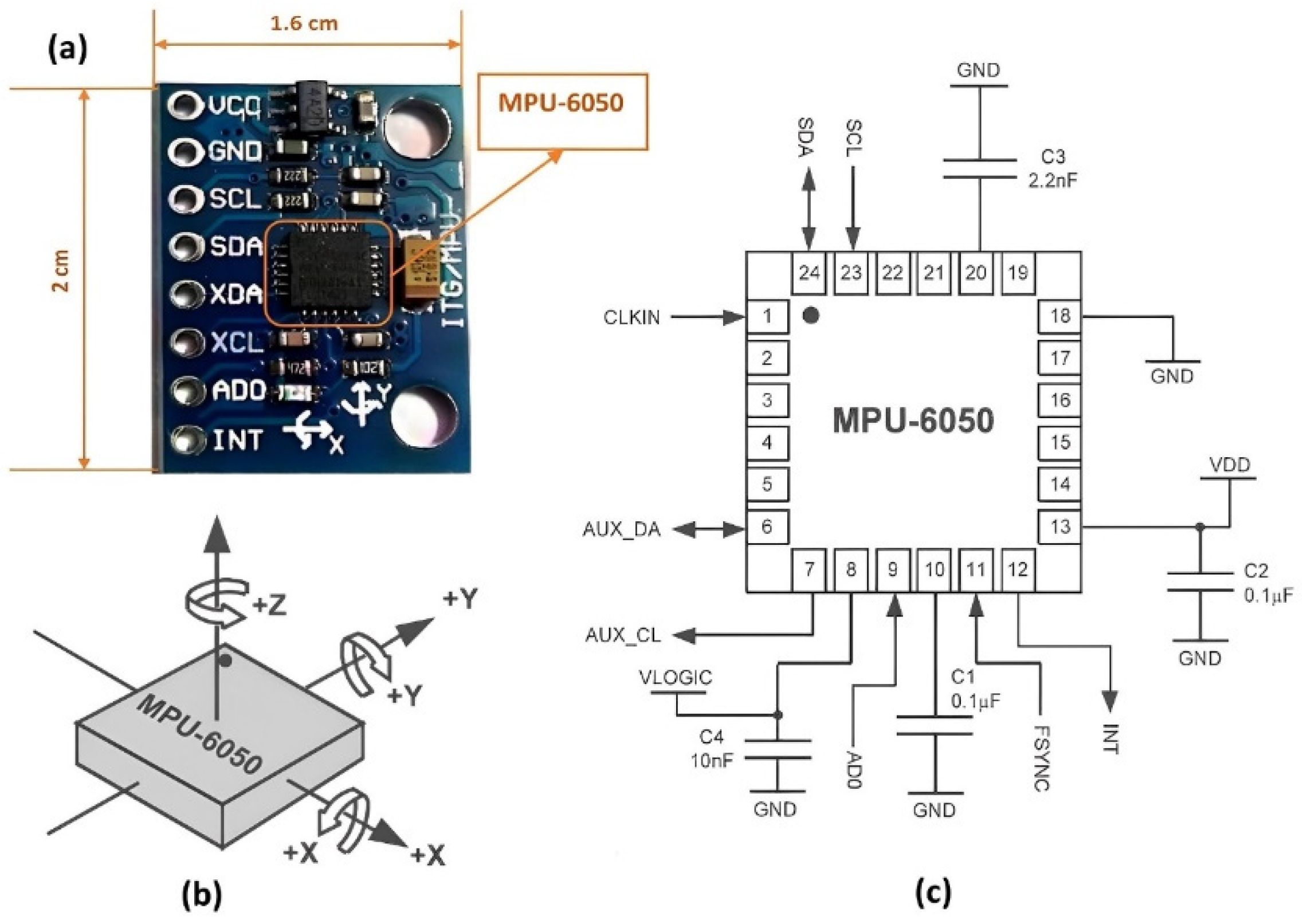
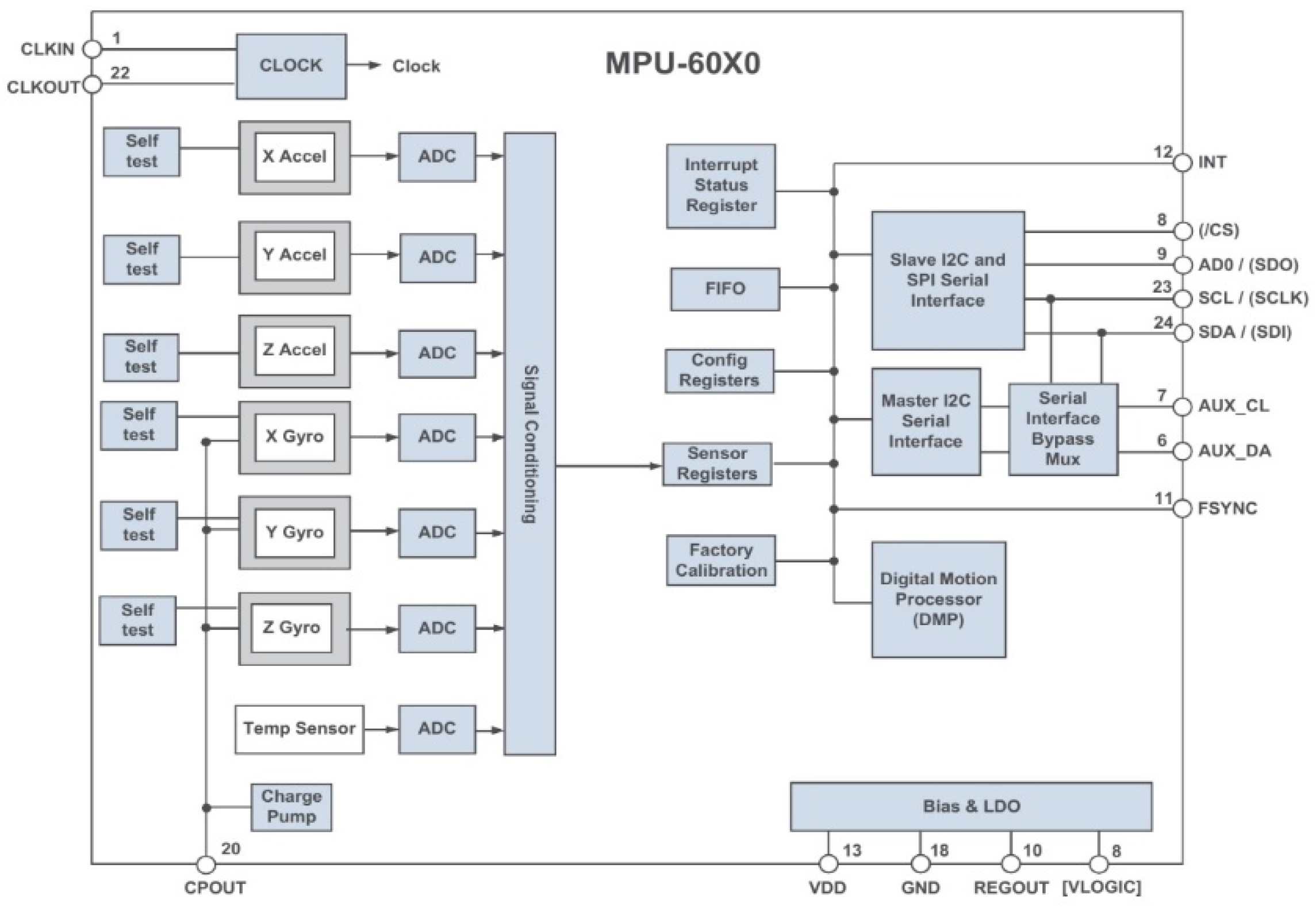
2.1.1. Tilt Sensor
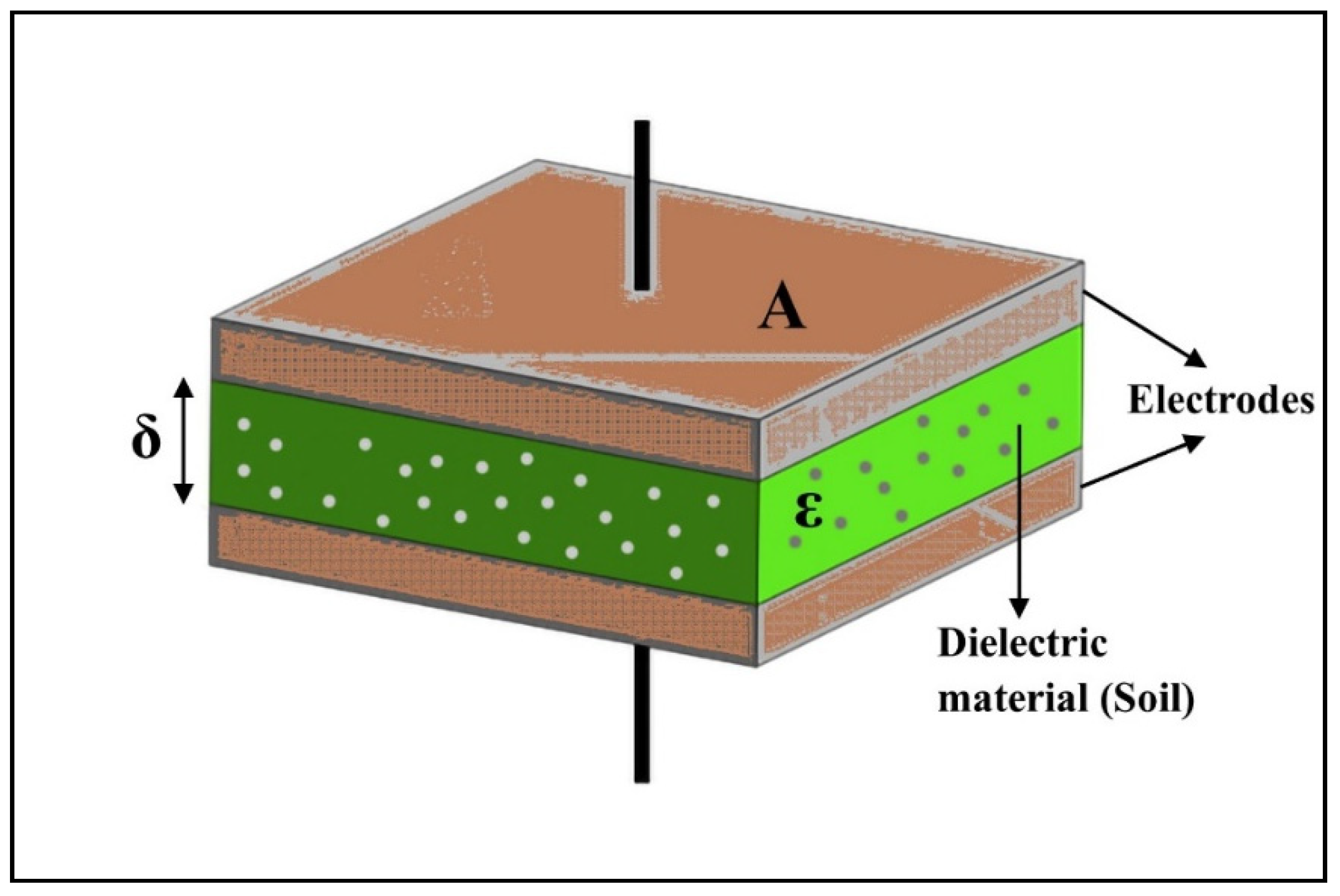
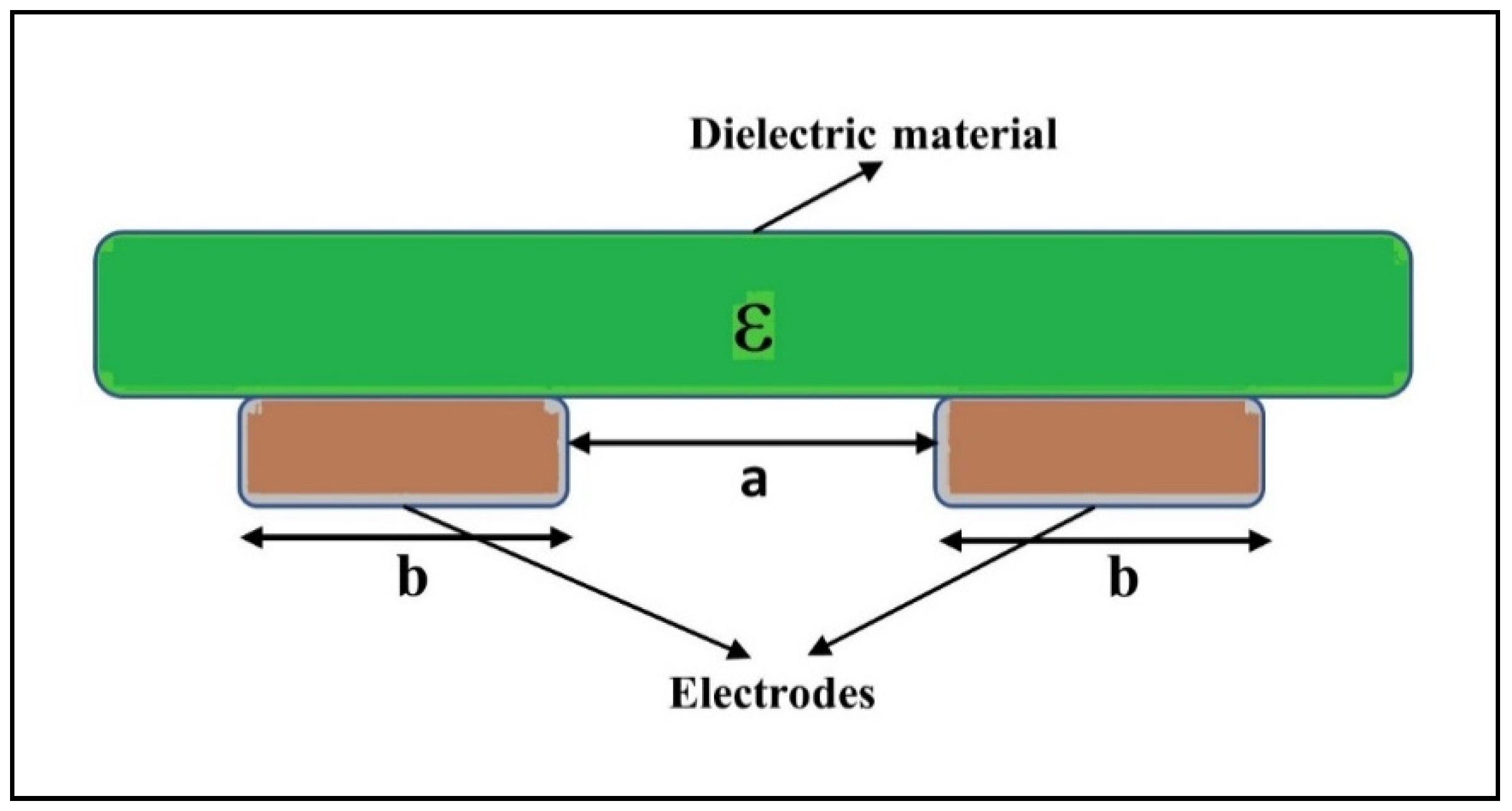
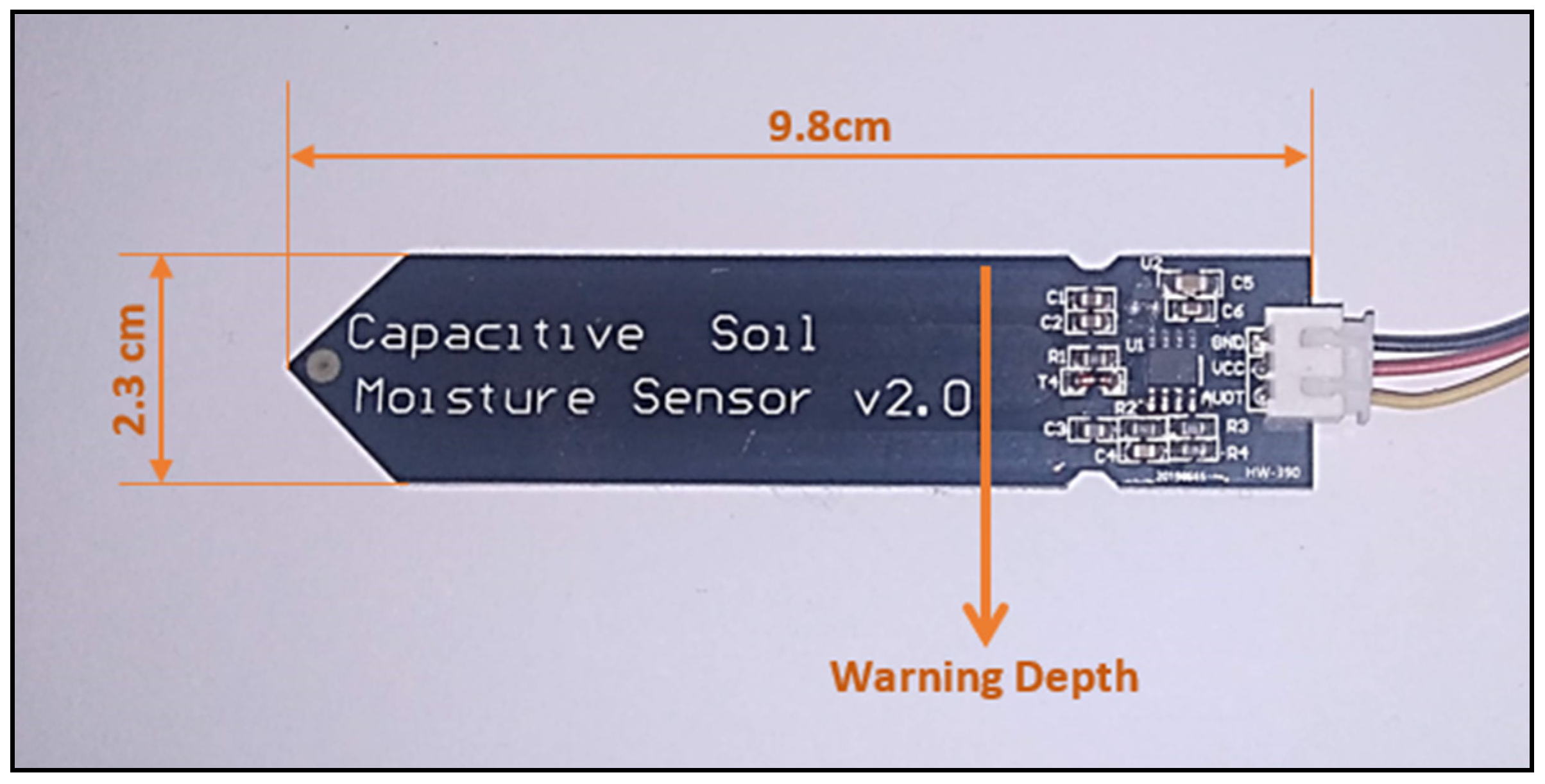
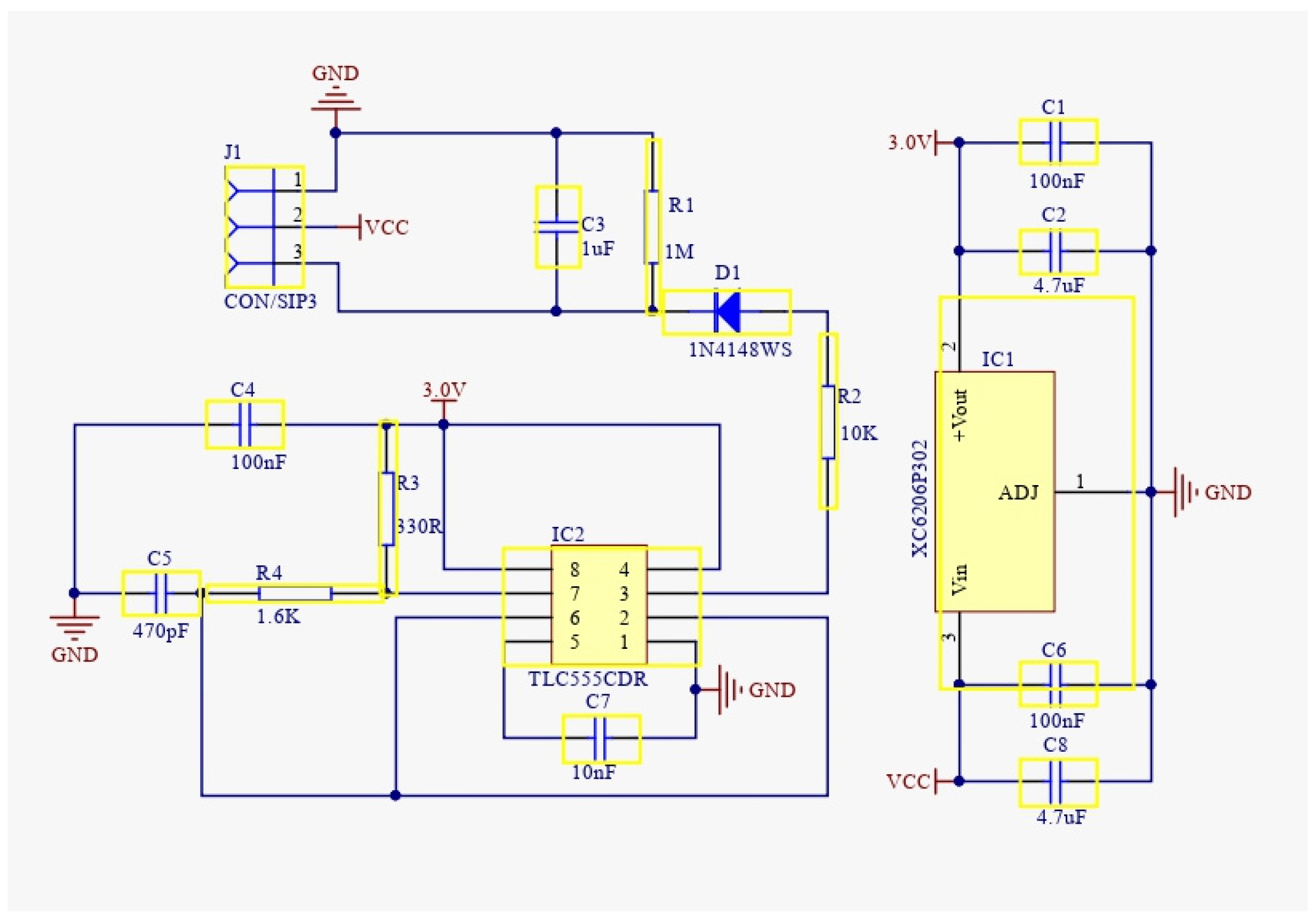
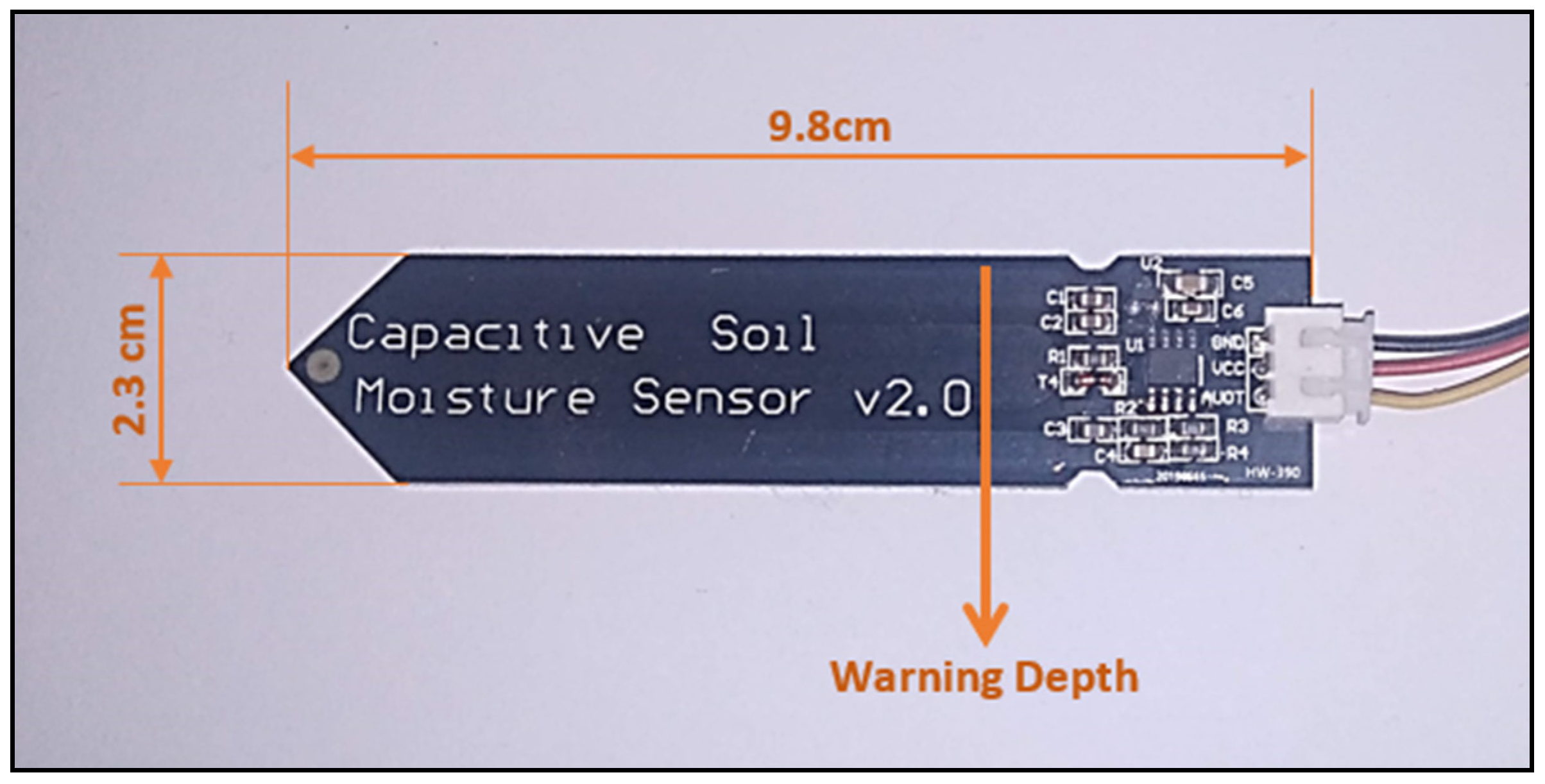
2.1.2. Soil Moisture Sensor
2.1.3. Development Board
2.1.4. Power Supply Unit
2.1.5. Programming
2.2. Data Logging Unit
2.3. Analysis Unit
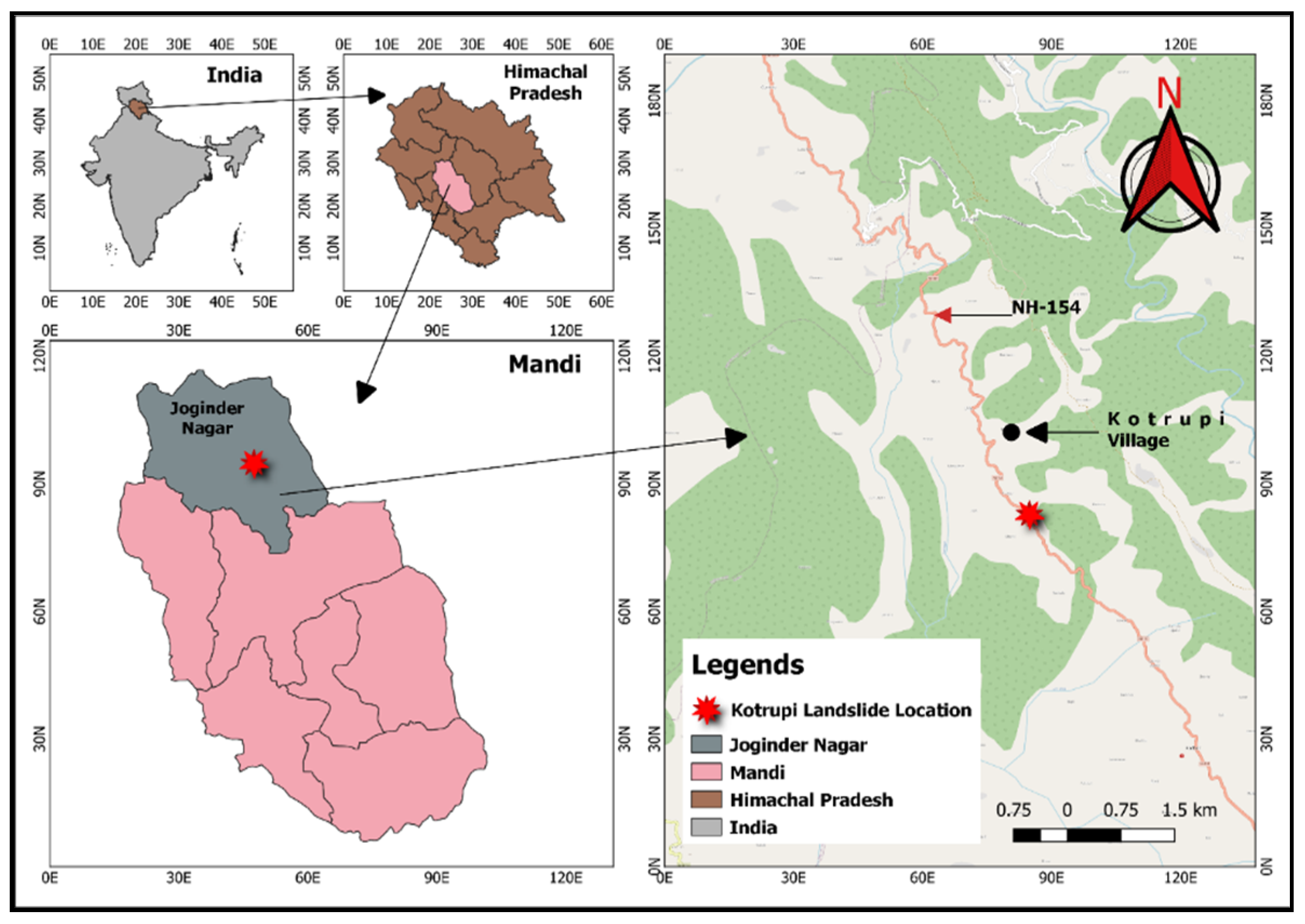
3. Study Area
3.1. Landslide Event and Mechanism
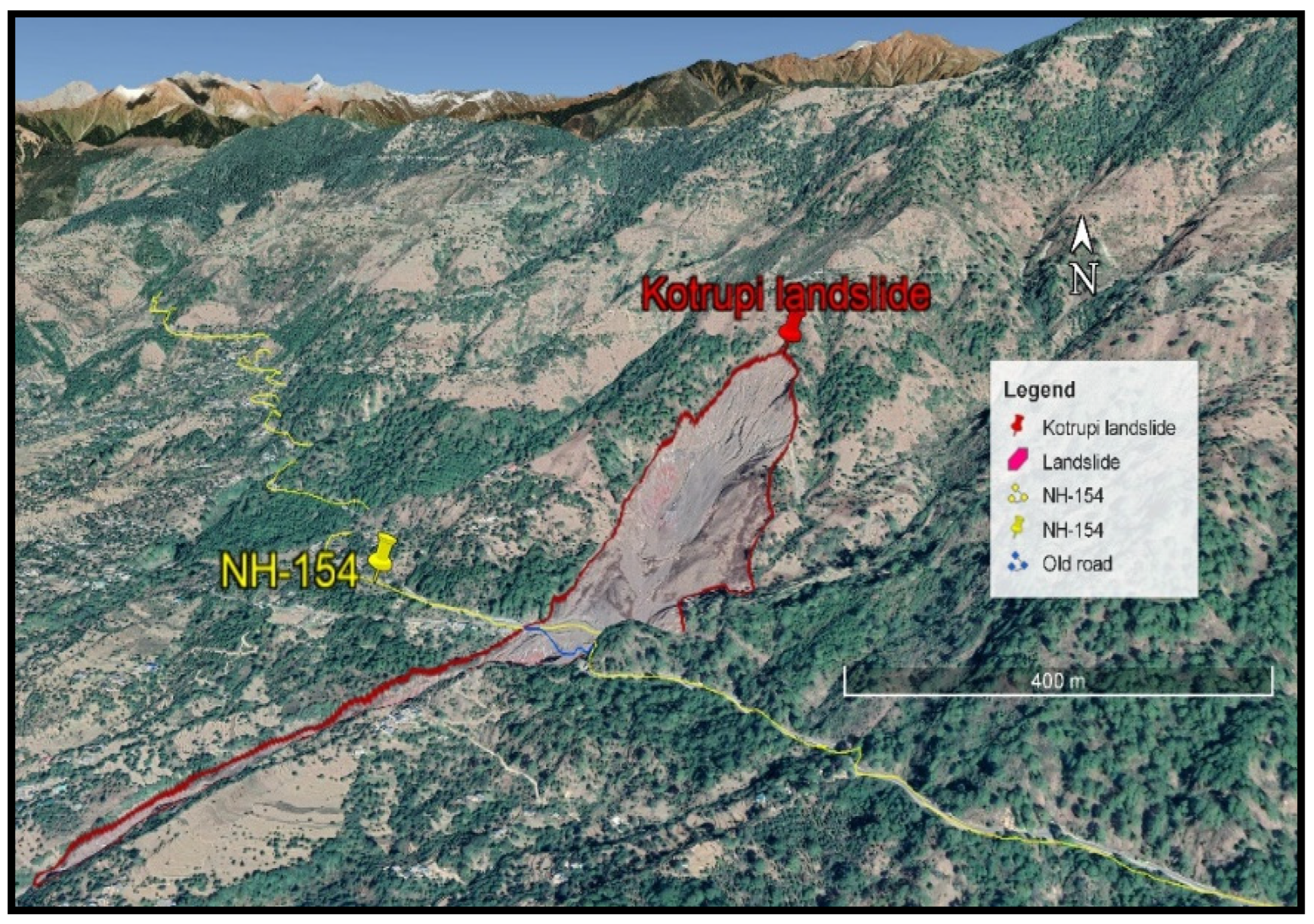
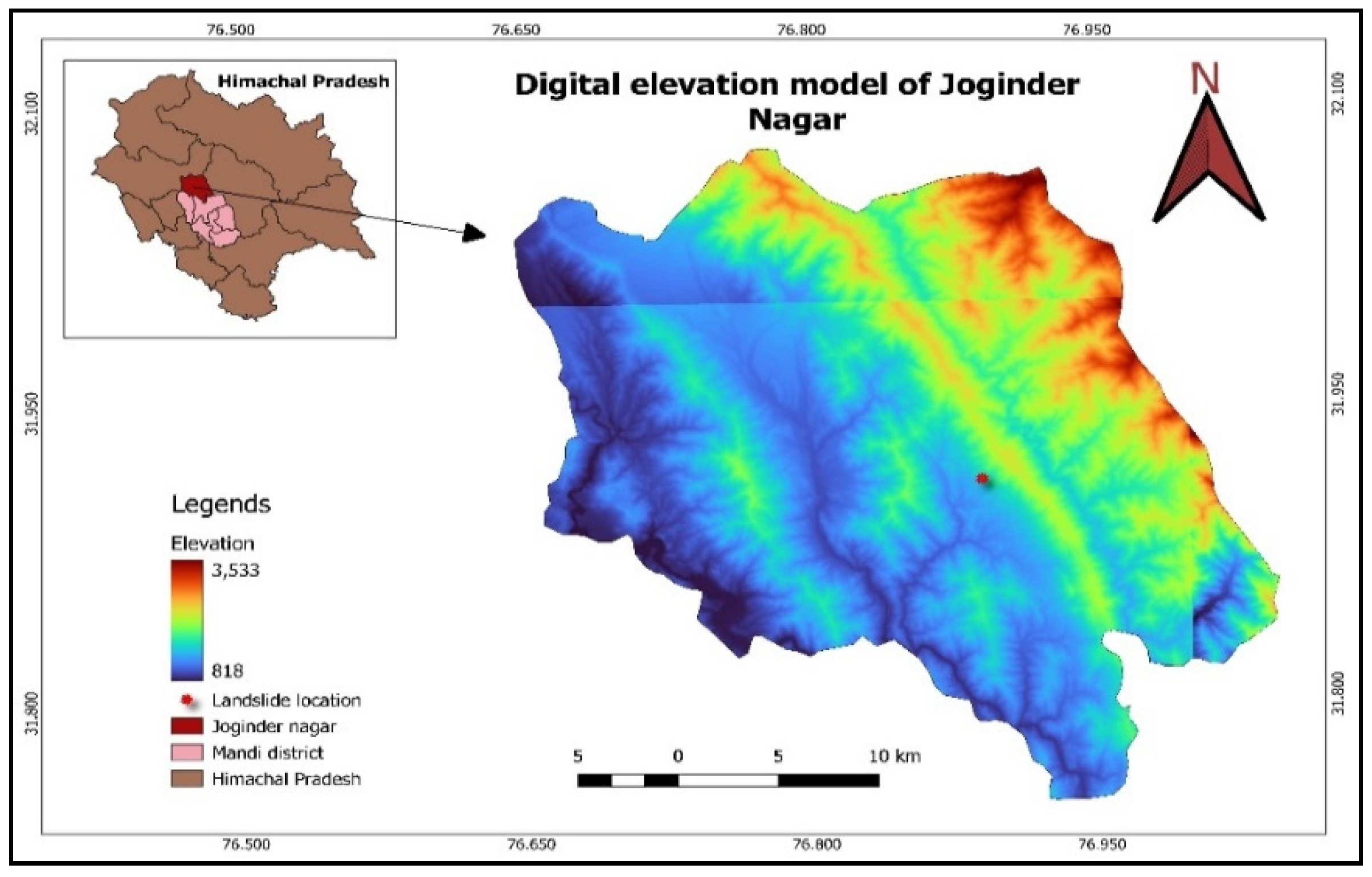
3.2. Description of Study Slope
3.3. Geotechnical Characteristics of the Slope Material
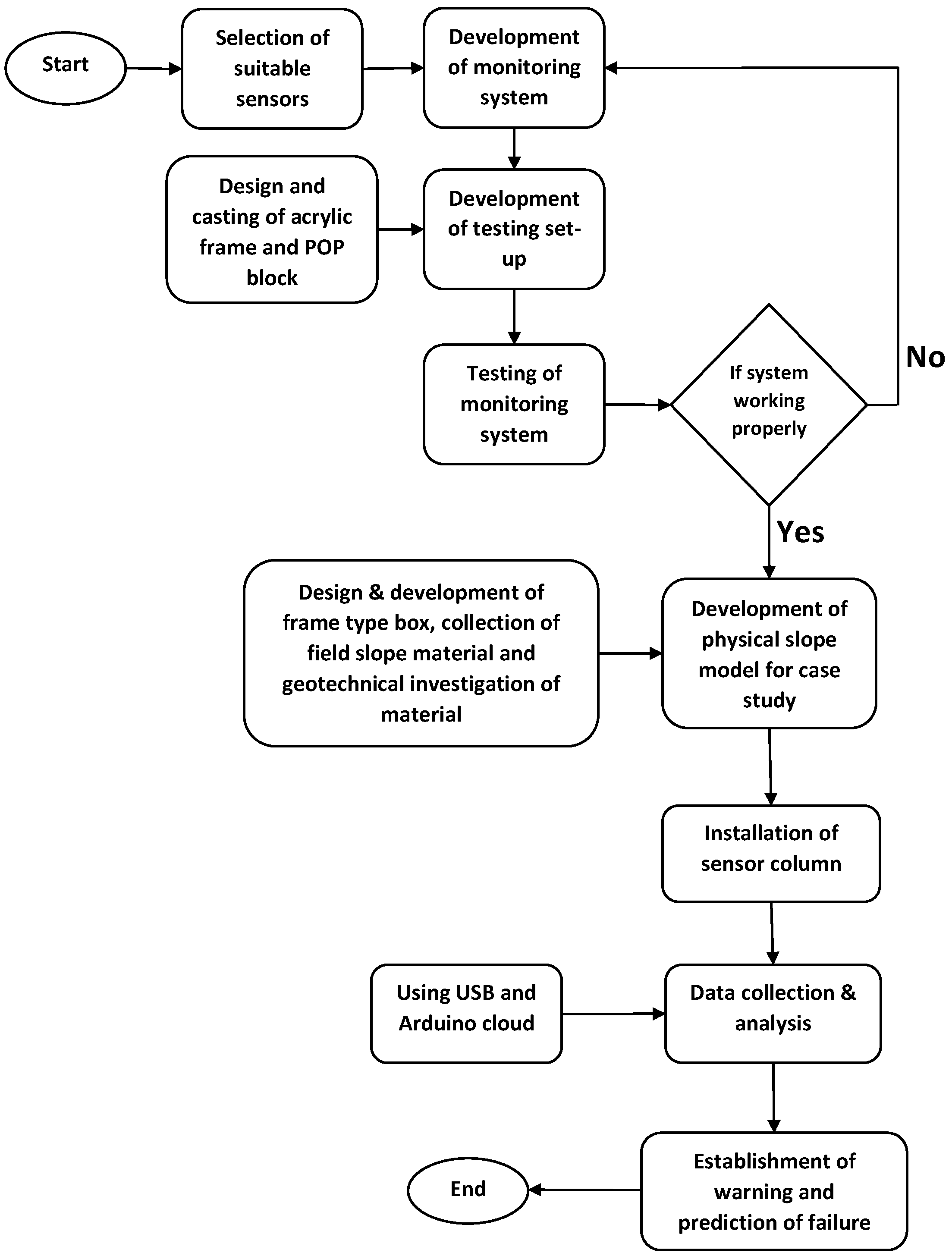
4. Methodology
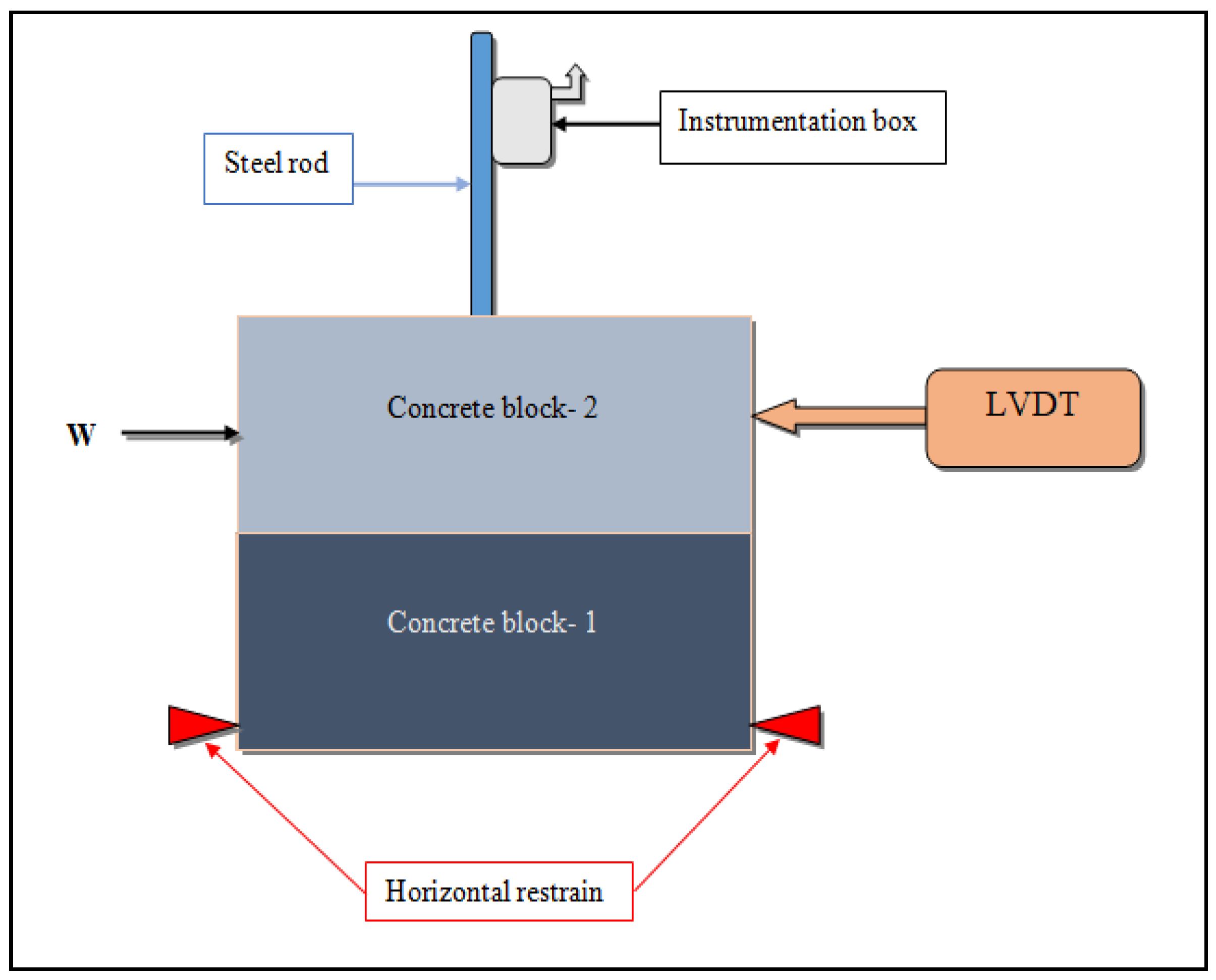
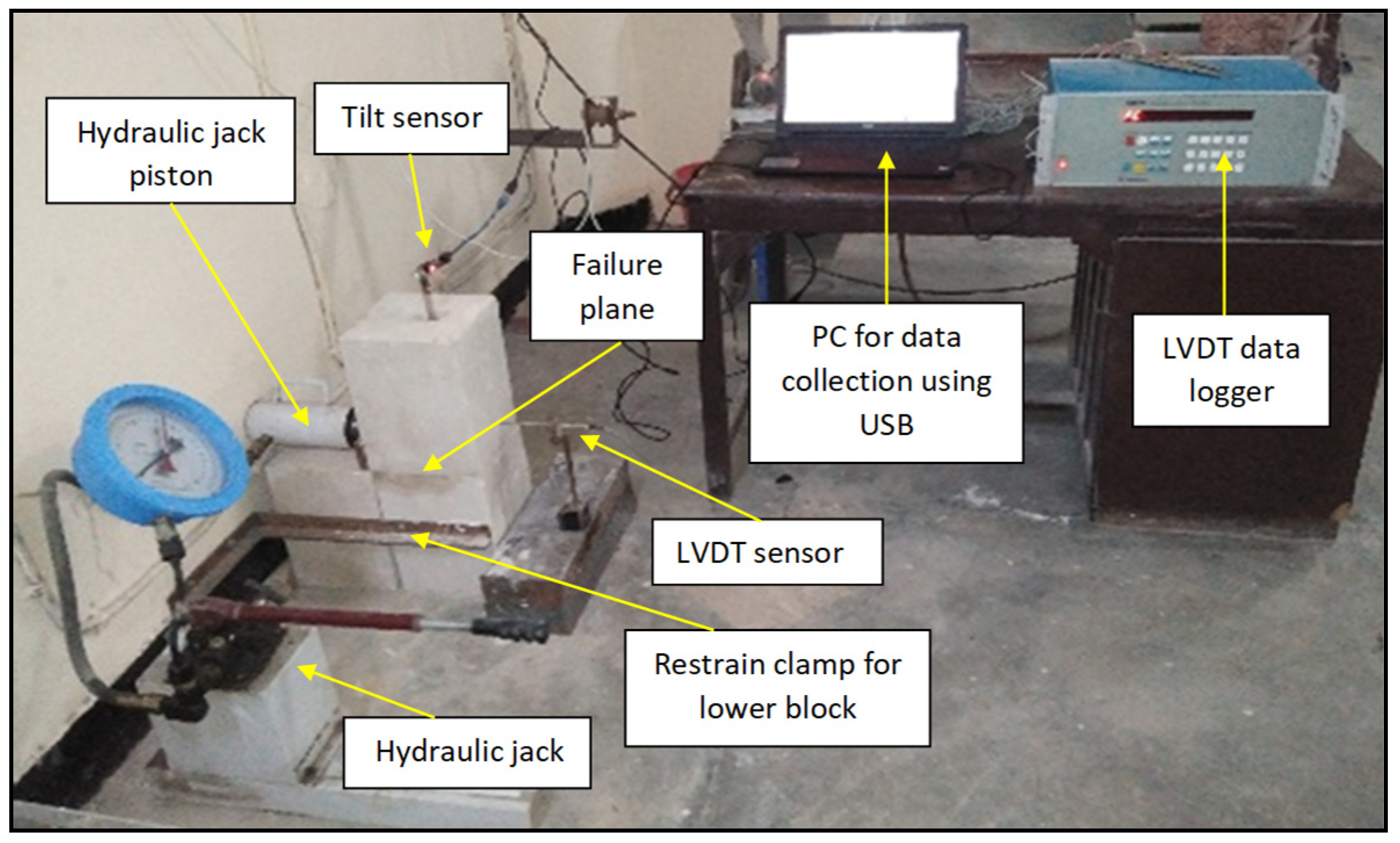
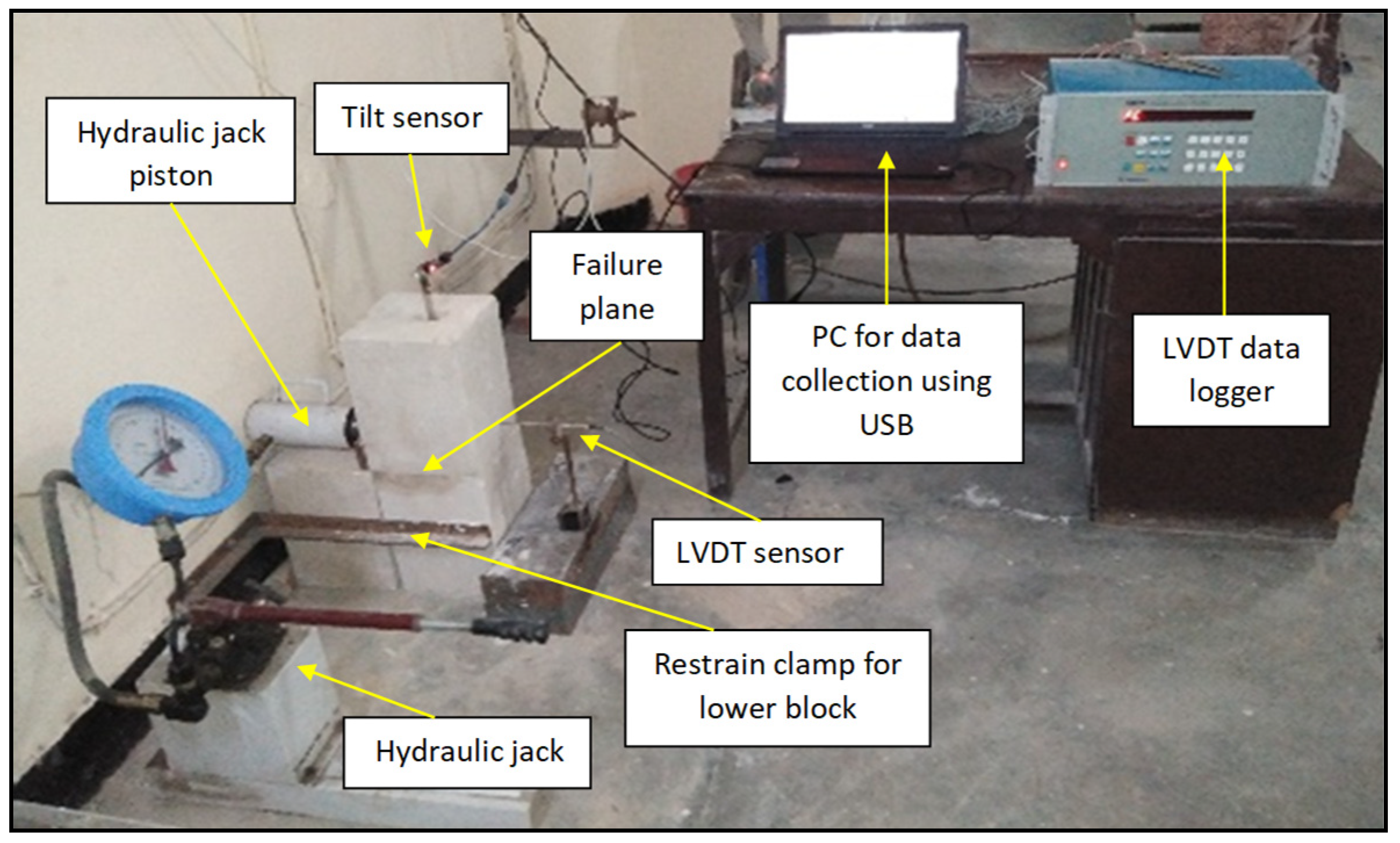
4.1. Testing Setup
4.2. Physical Modelling of Slope
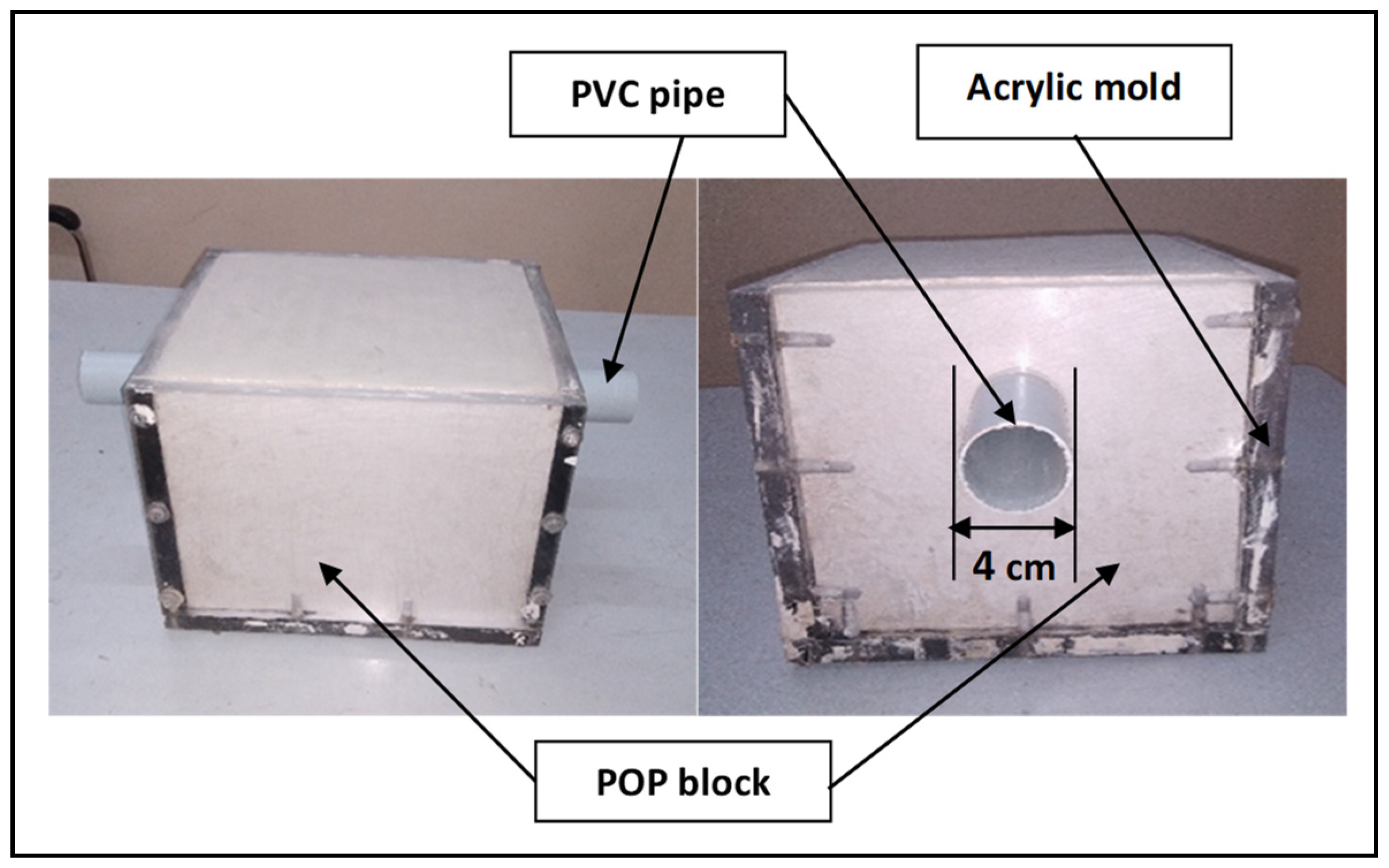
4.2.1. Frame Type Box
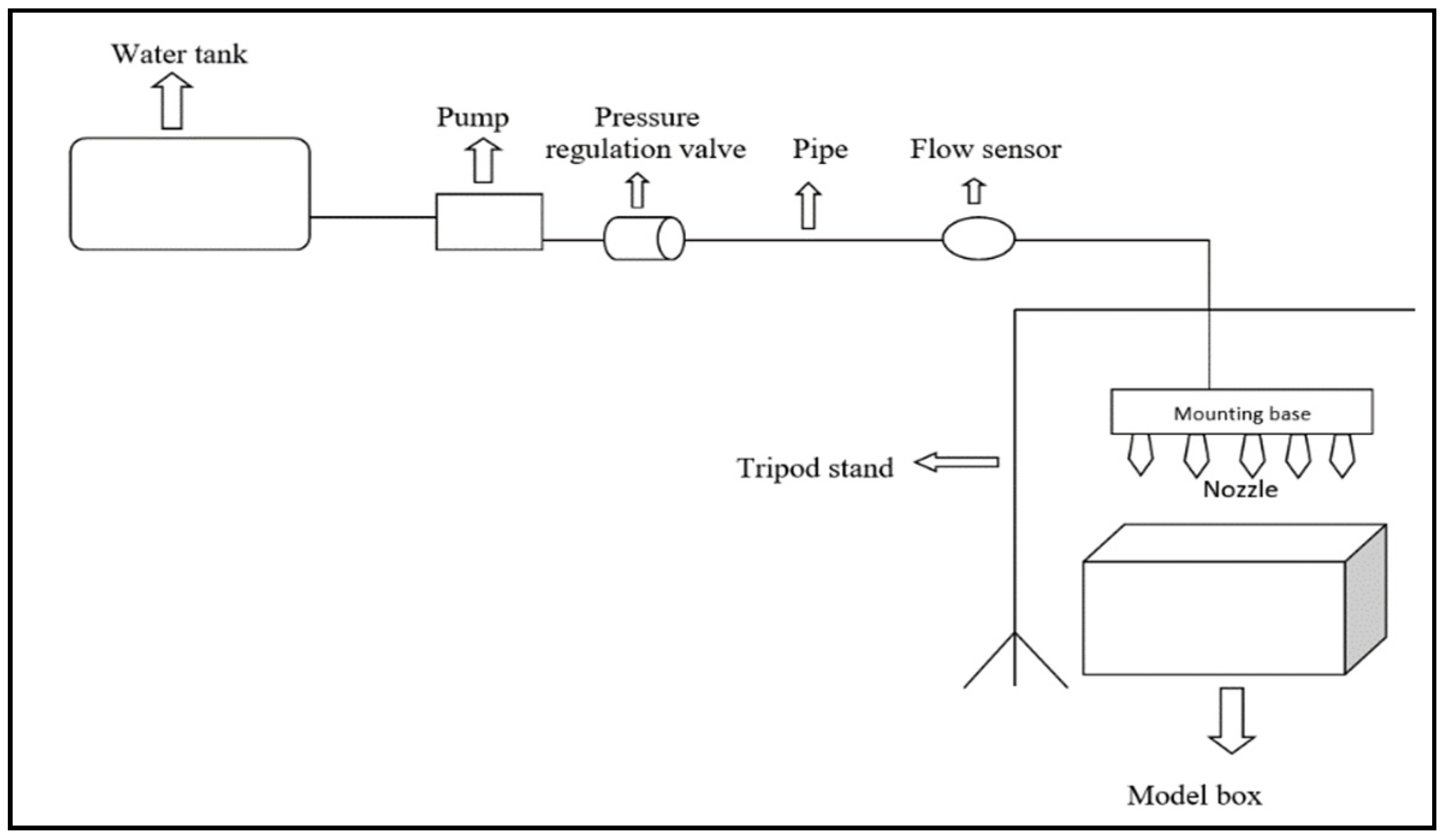
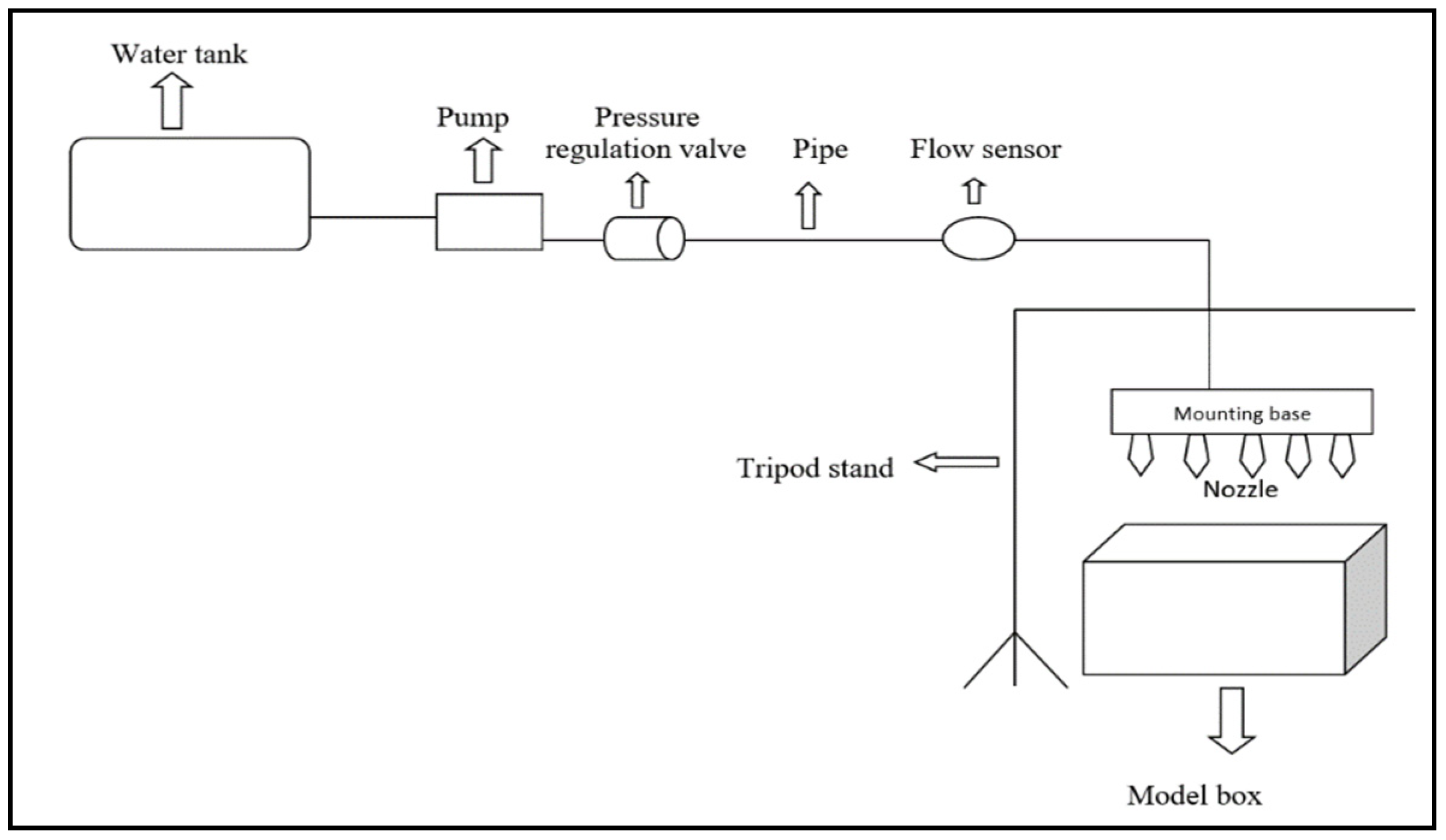
4.2.2. Rainfall Simulator
5. Results and Discussion
5.1. Results of the Self-Developed Test Setup
5.2. Results of the Physical Model
5.2.1. Soil Properties
5.2.2. Monitoring Results of Soil Slope
6. Conclusions
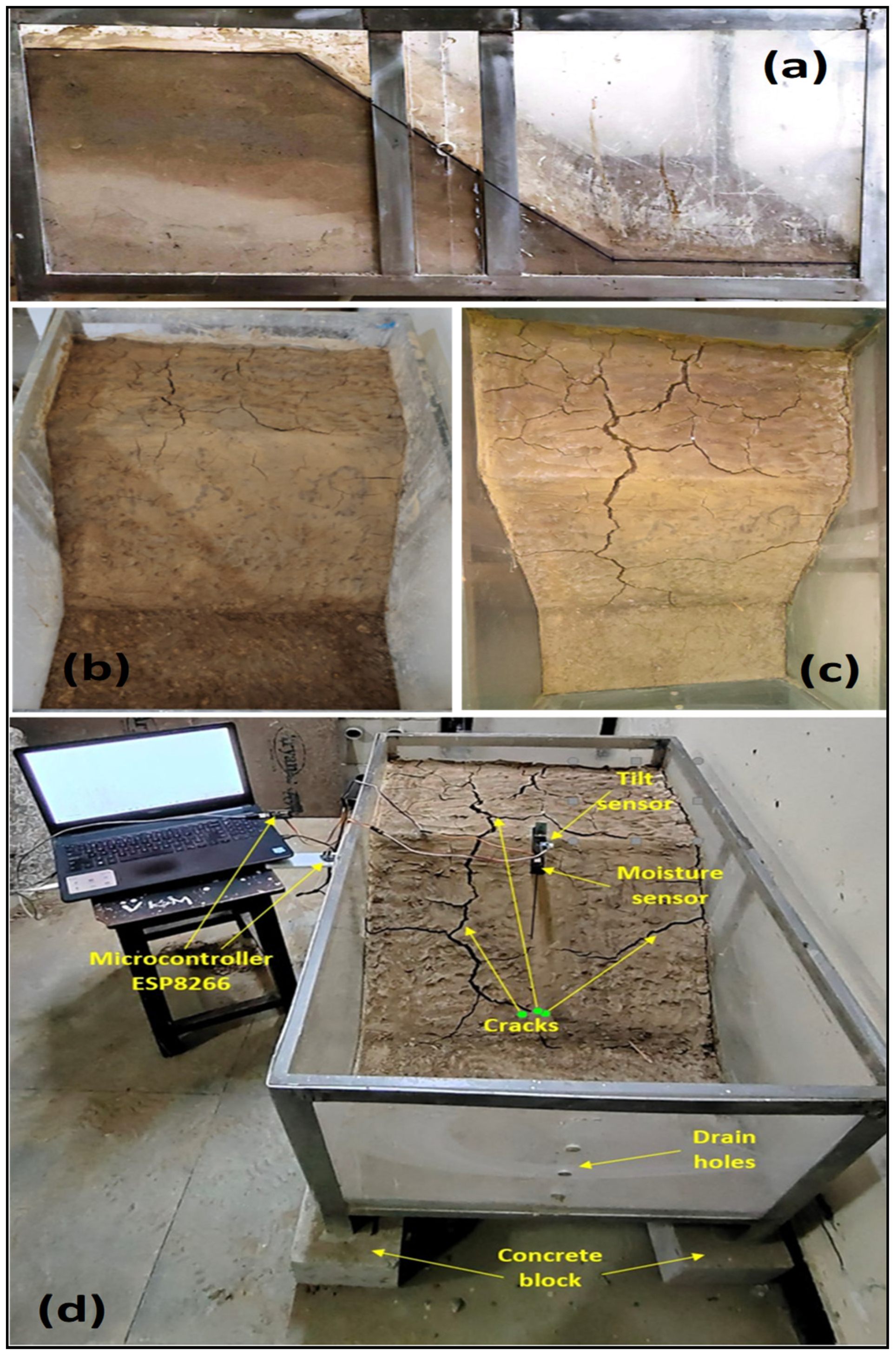
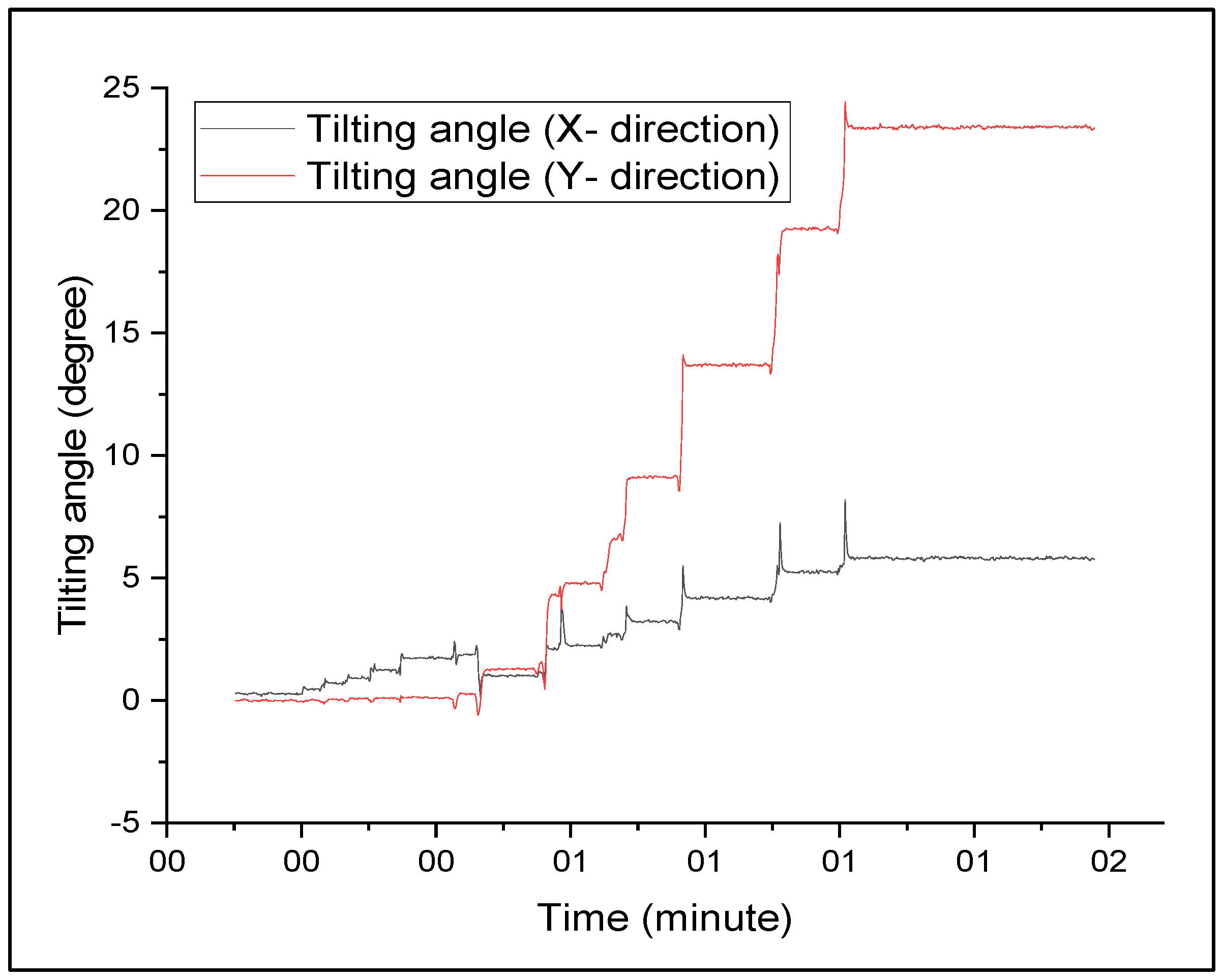
- A self-developed direct shear model was used to examine the effectiveness of a rudimentary monitoring system designed to prevent landslides caused by rainfall. Tilt sensors were placed on the slope’s surface in a physical slope model to detect any abnormal variation in the angle at which the sensors are tilted.
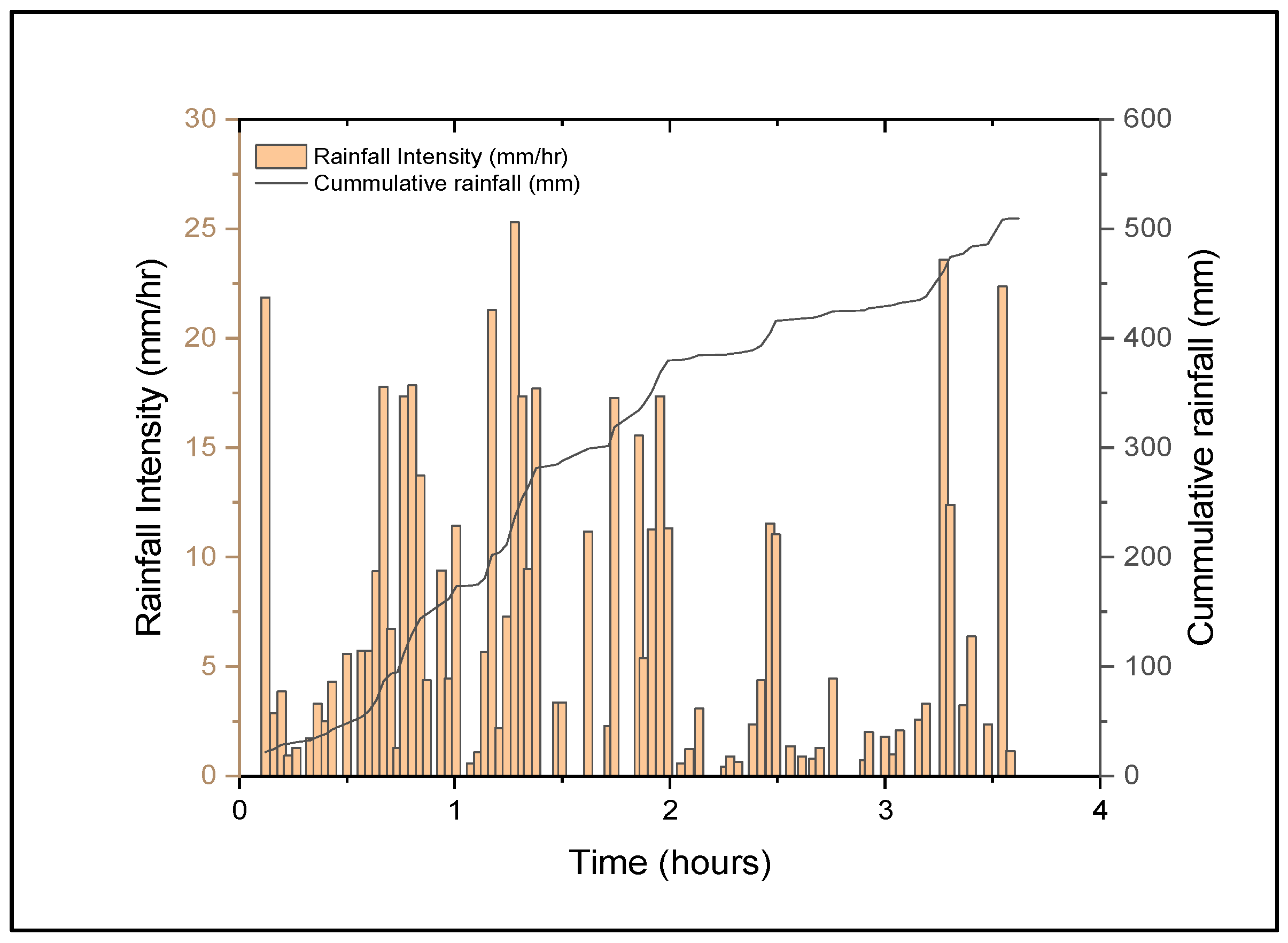
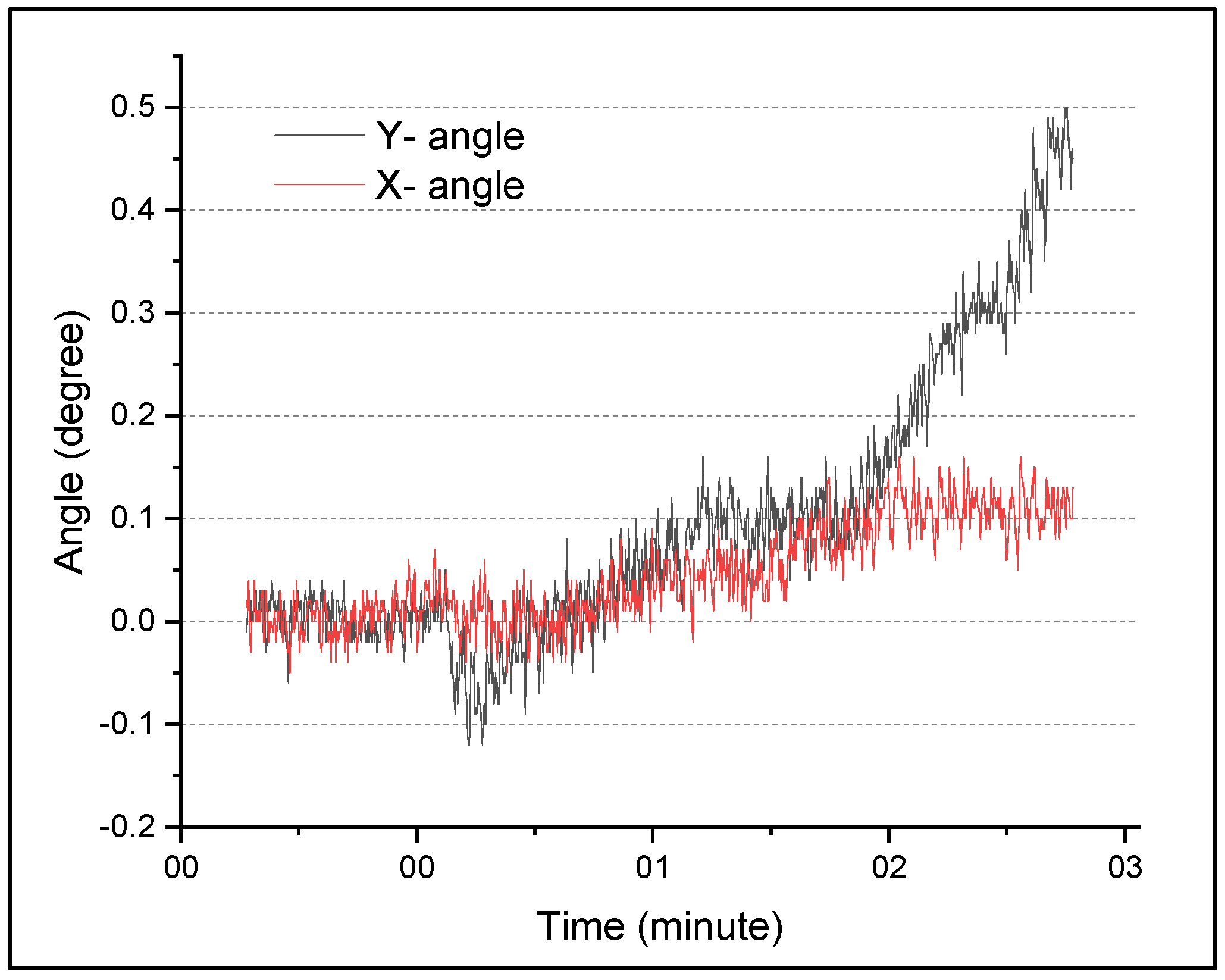
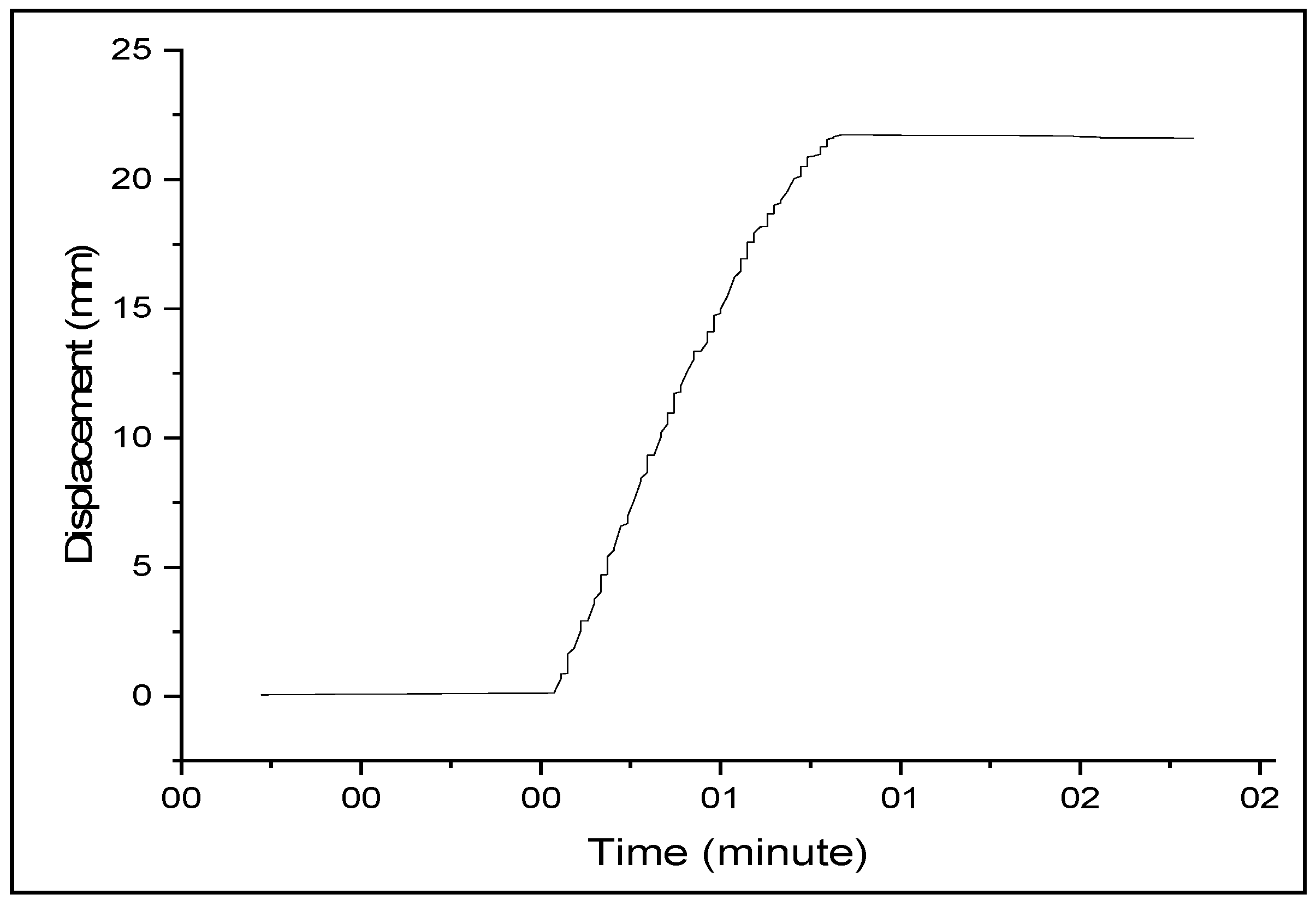
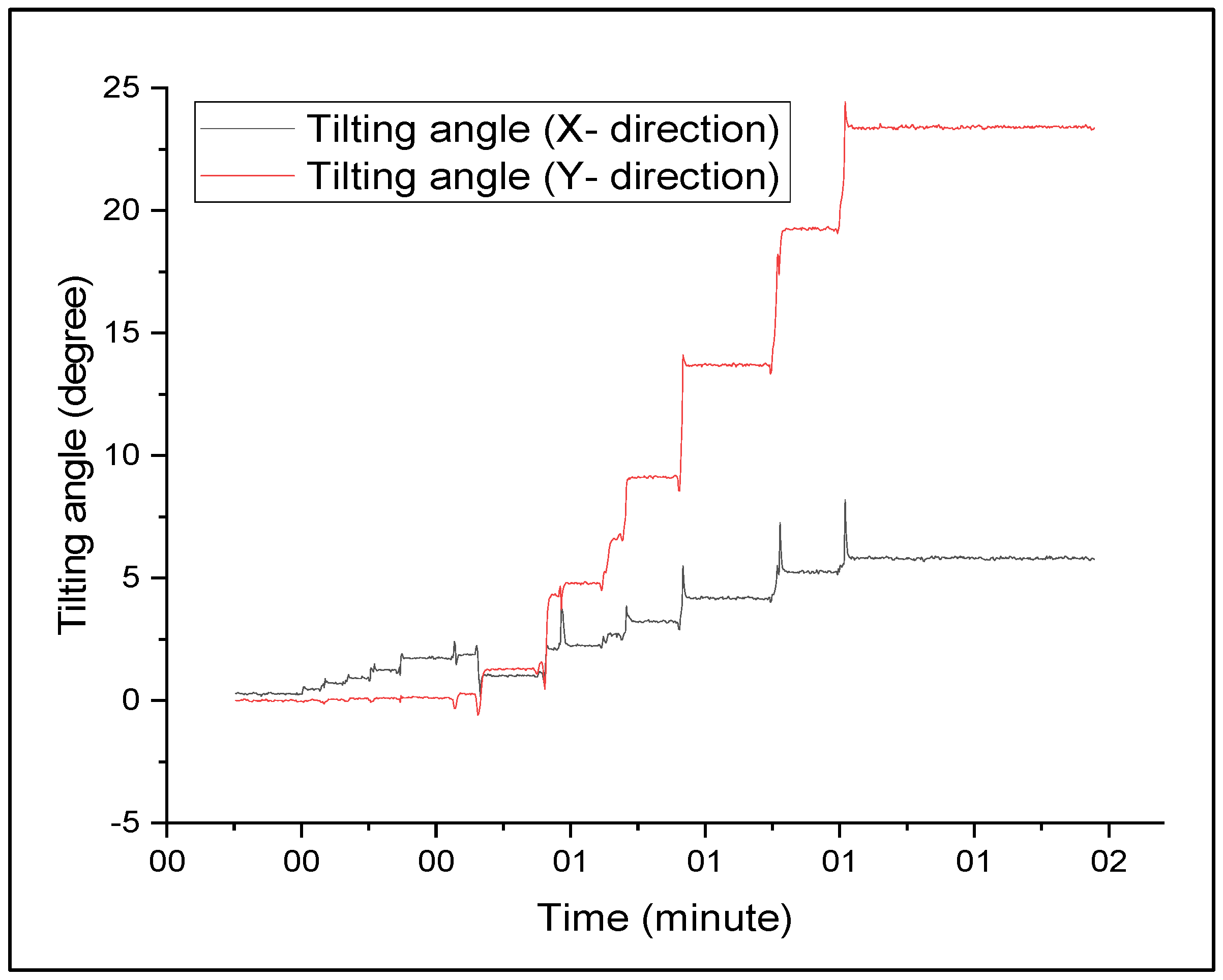
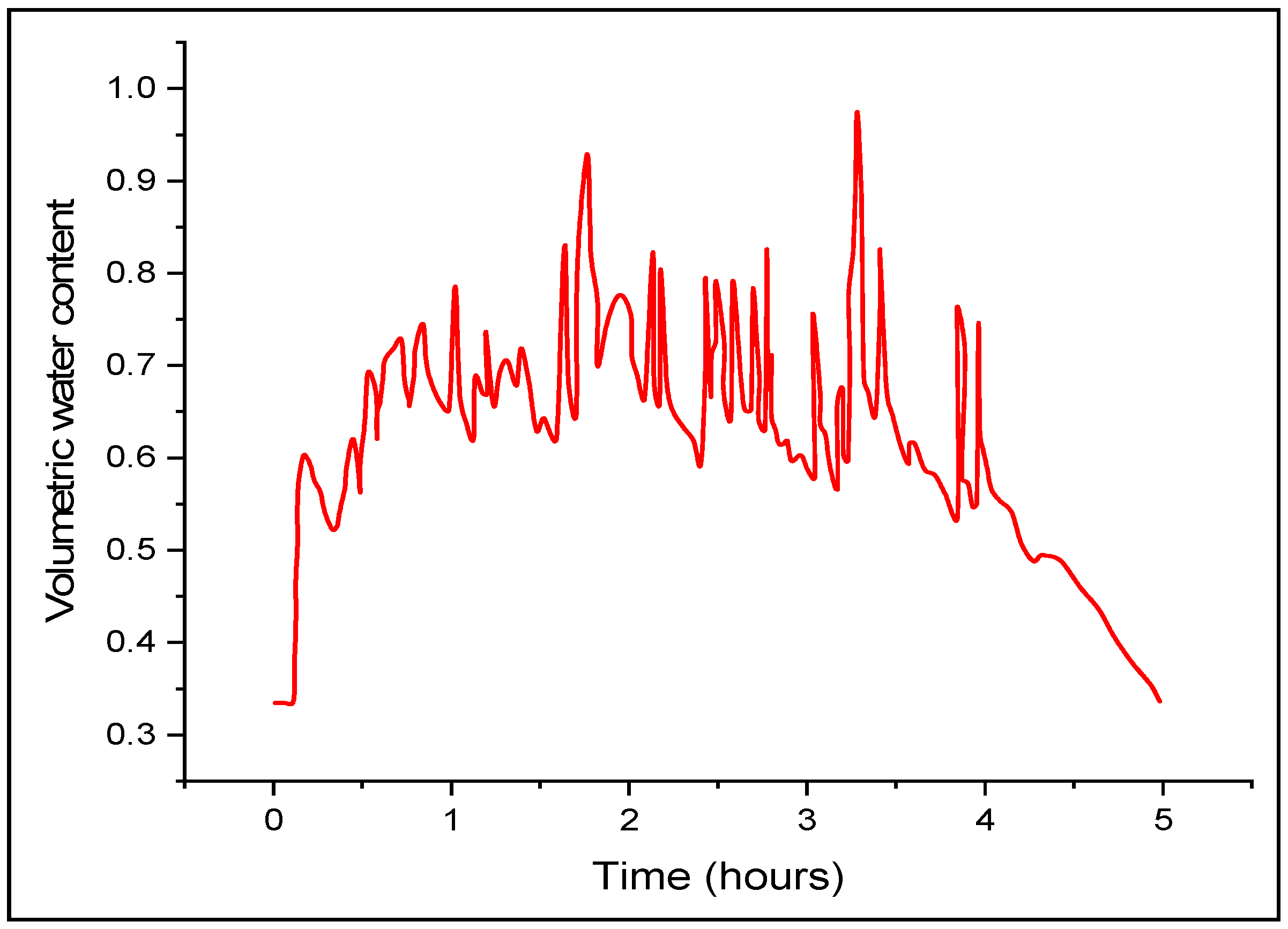
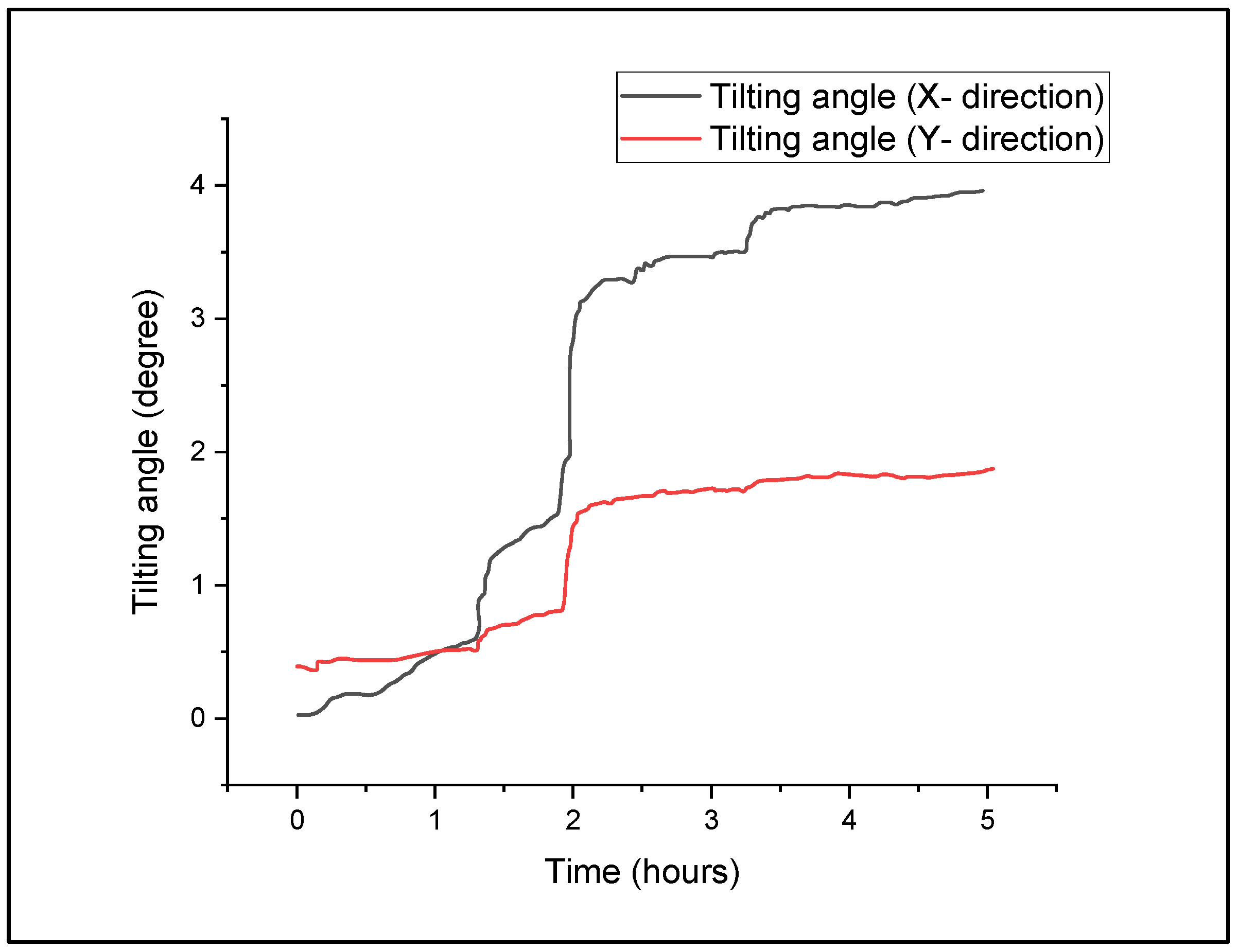
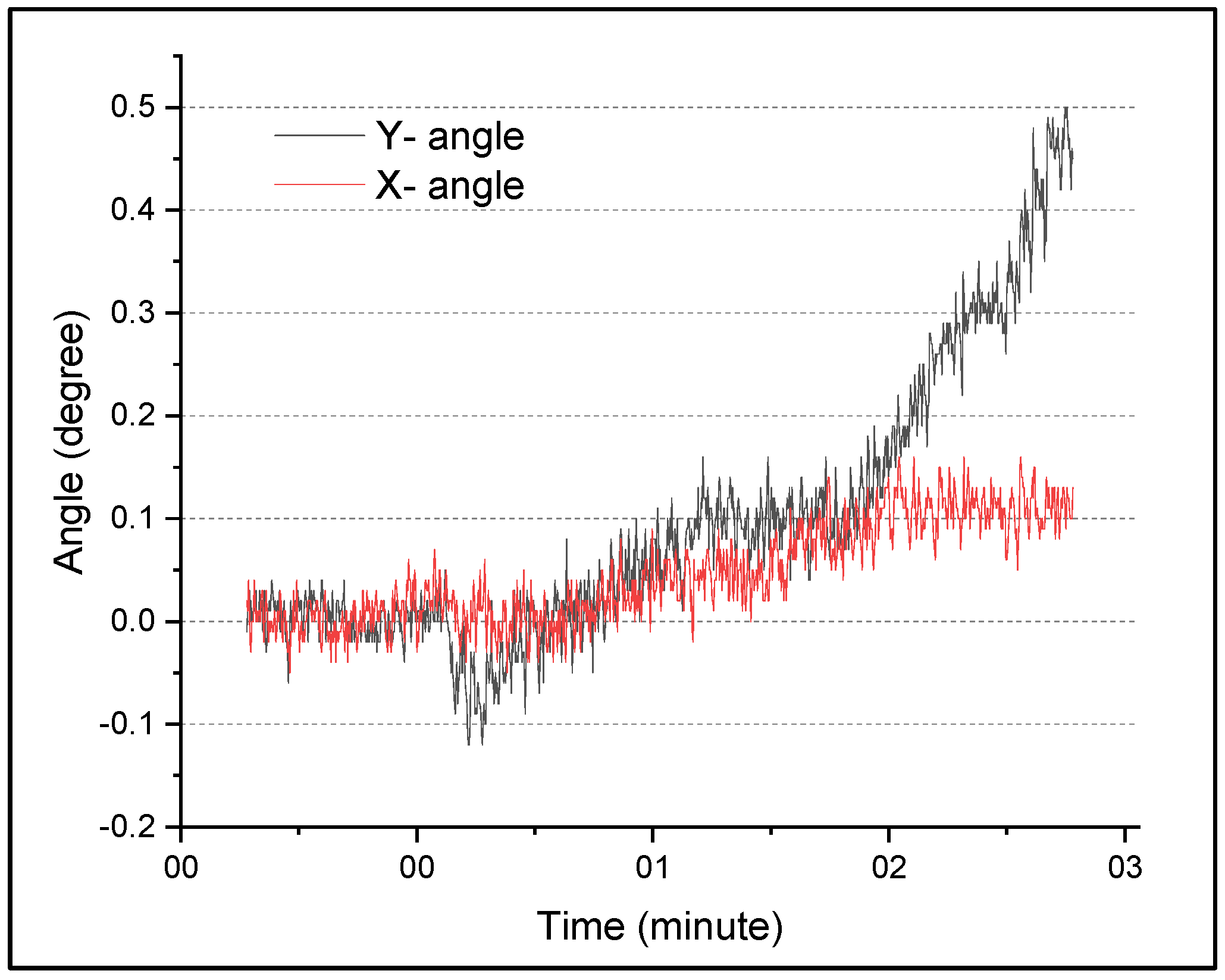
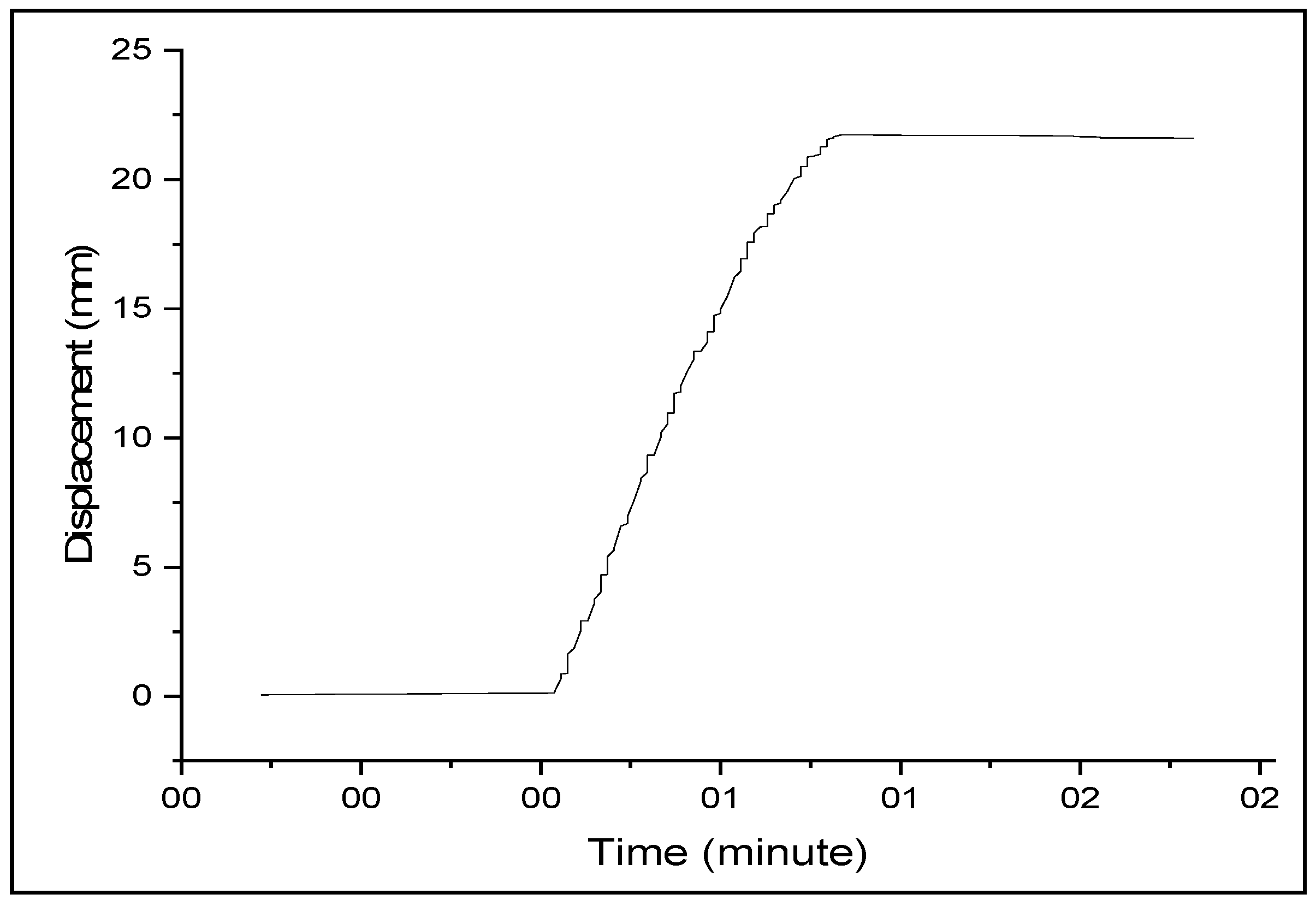
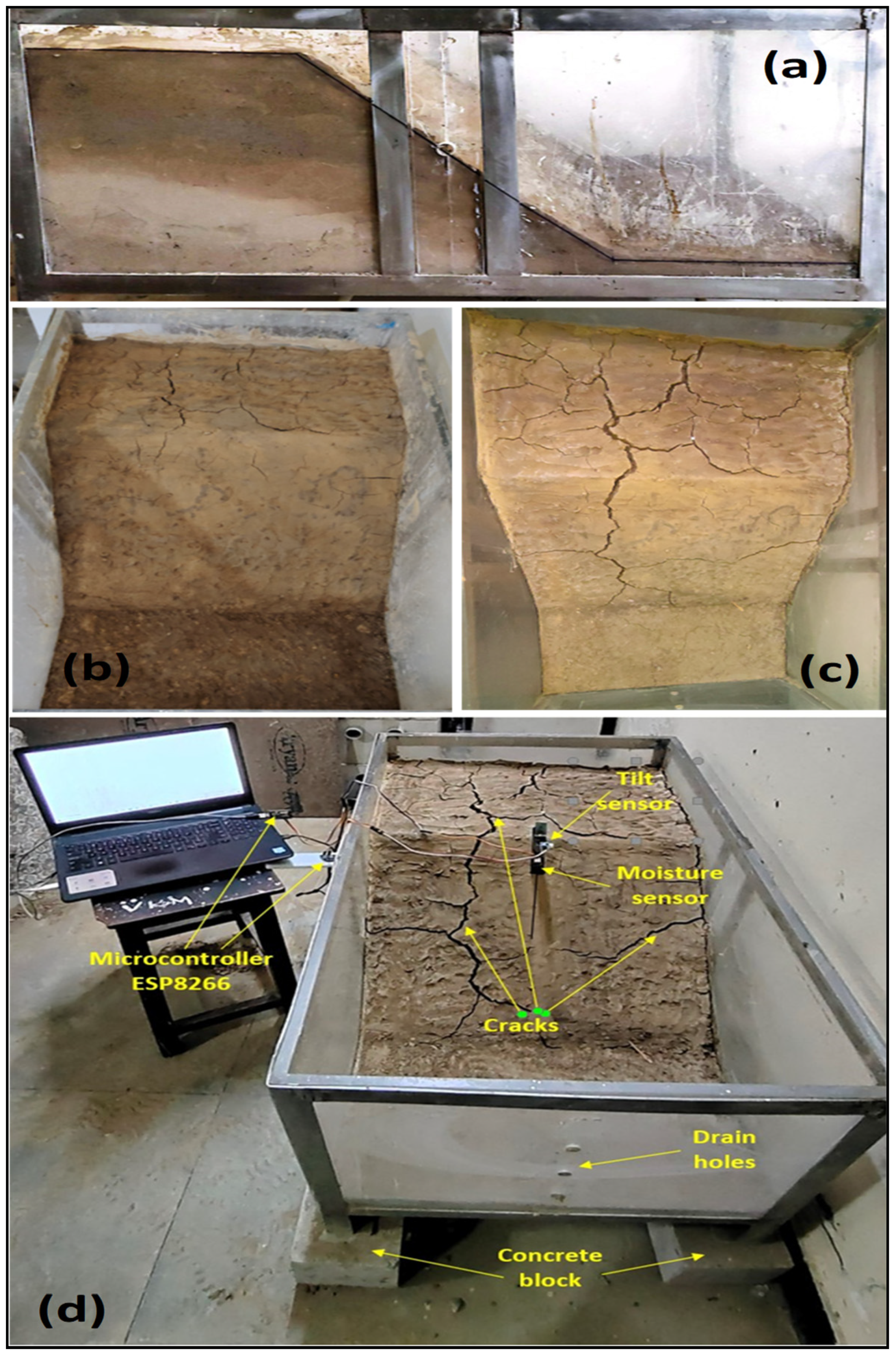
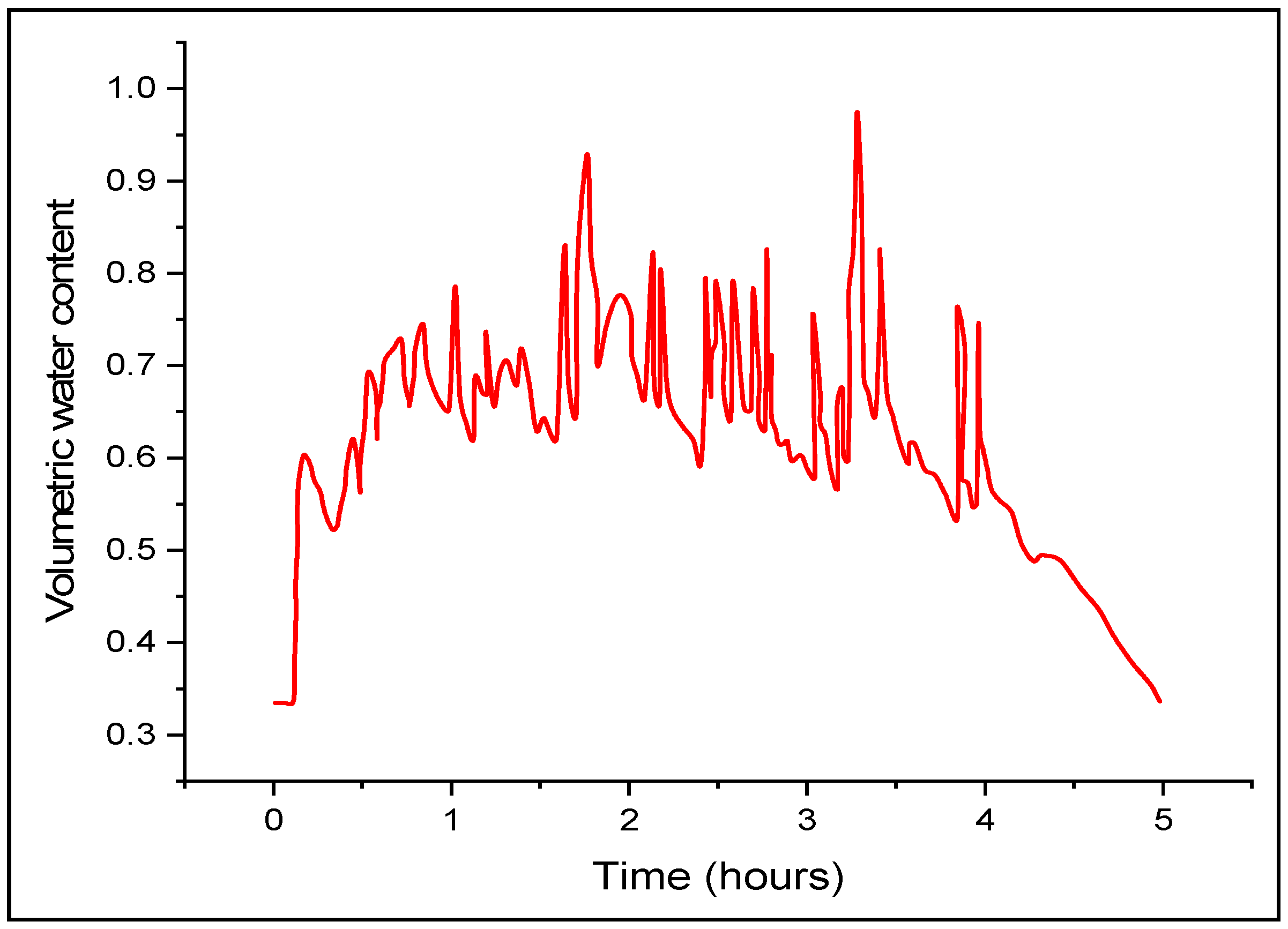
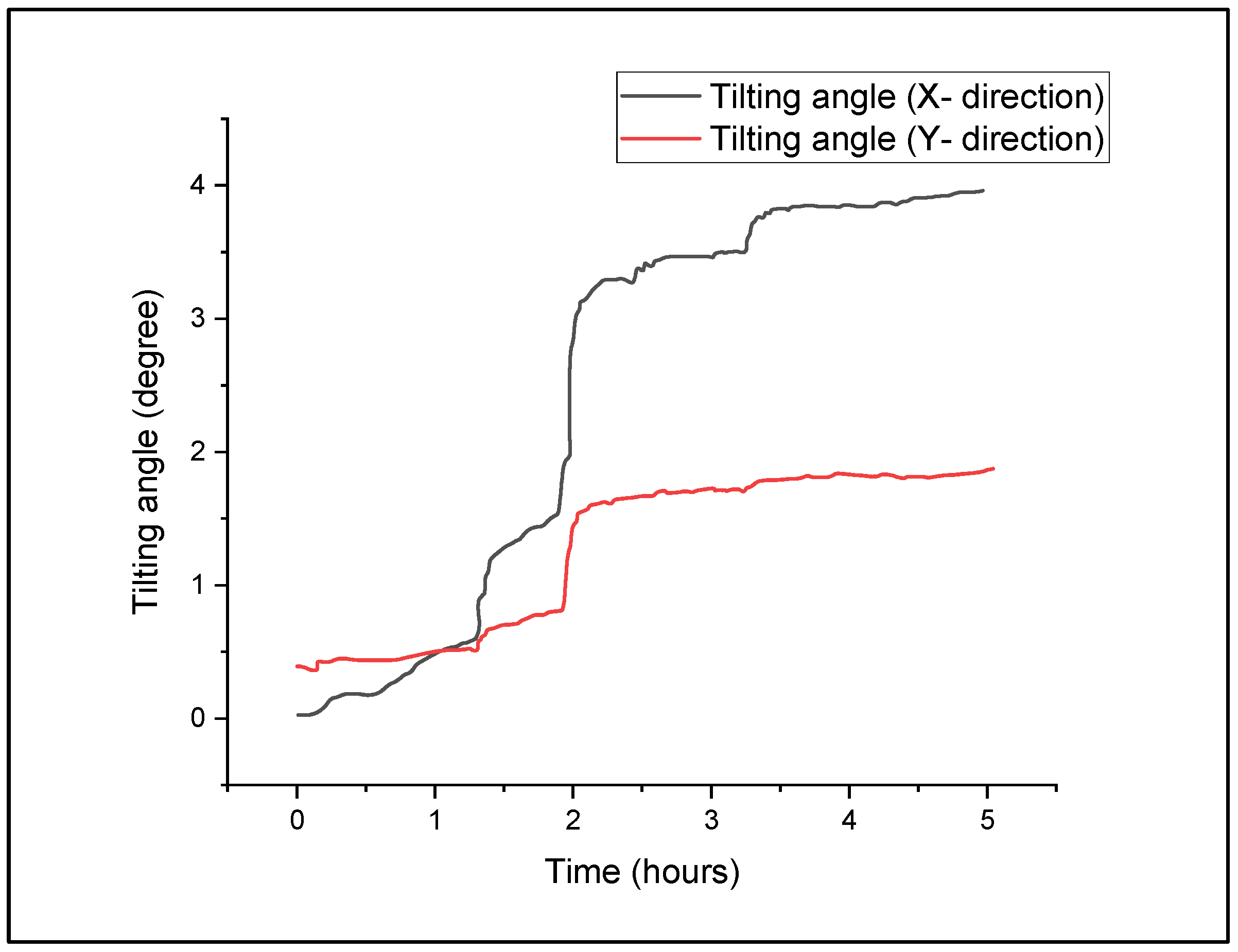
- The tilt and volumetric water content sensors were installed on the upper section of the slope and were confirmed with the displacement (Figure 20, Figure 21, Figure 22 and Figure 23). There was a sudden movement in slope recorded under the influence of applied rainfall in the course of the research. The precise amount of rain or rate of tilting required for landslides is hard to express.
- The findings show that prior rainfall causes slope displacement, supporting earlier research in this area. By adopting such a system, it may also be possible to validate existing rainfall threshold models produced, and the site-specific empirical equation can be created based on circumstances.
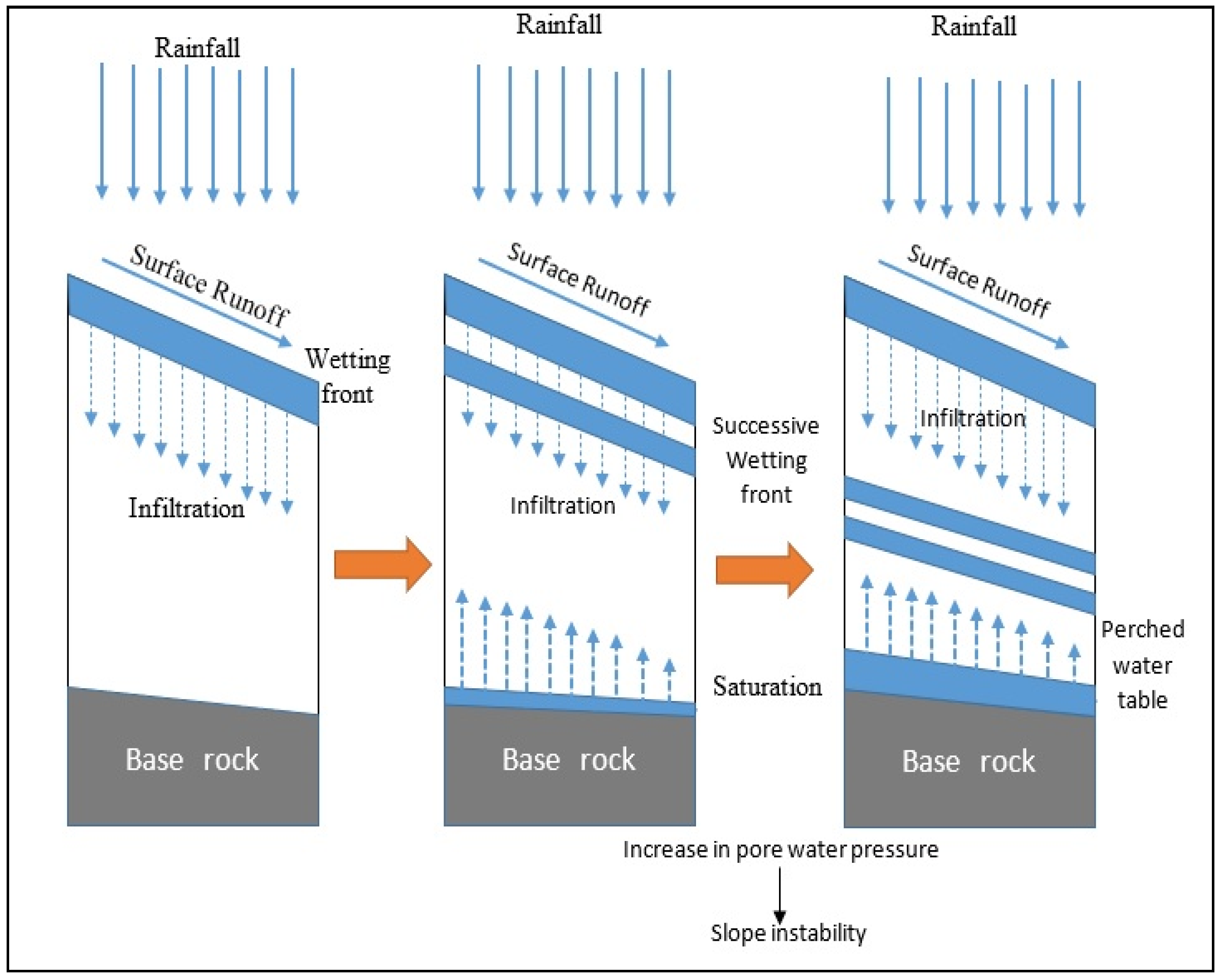
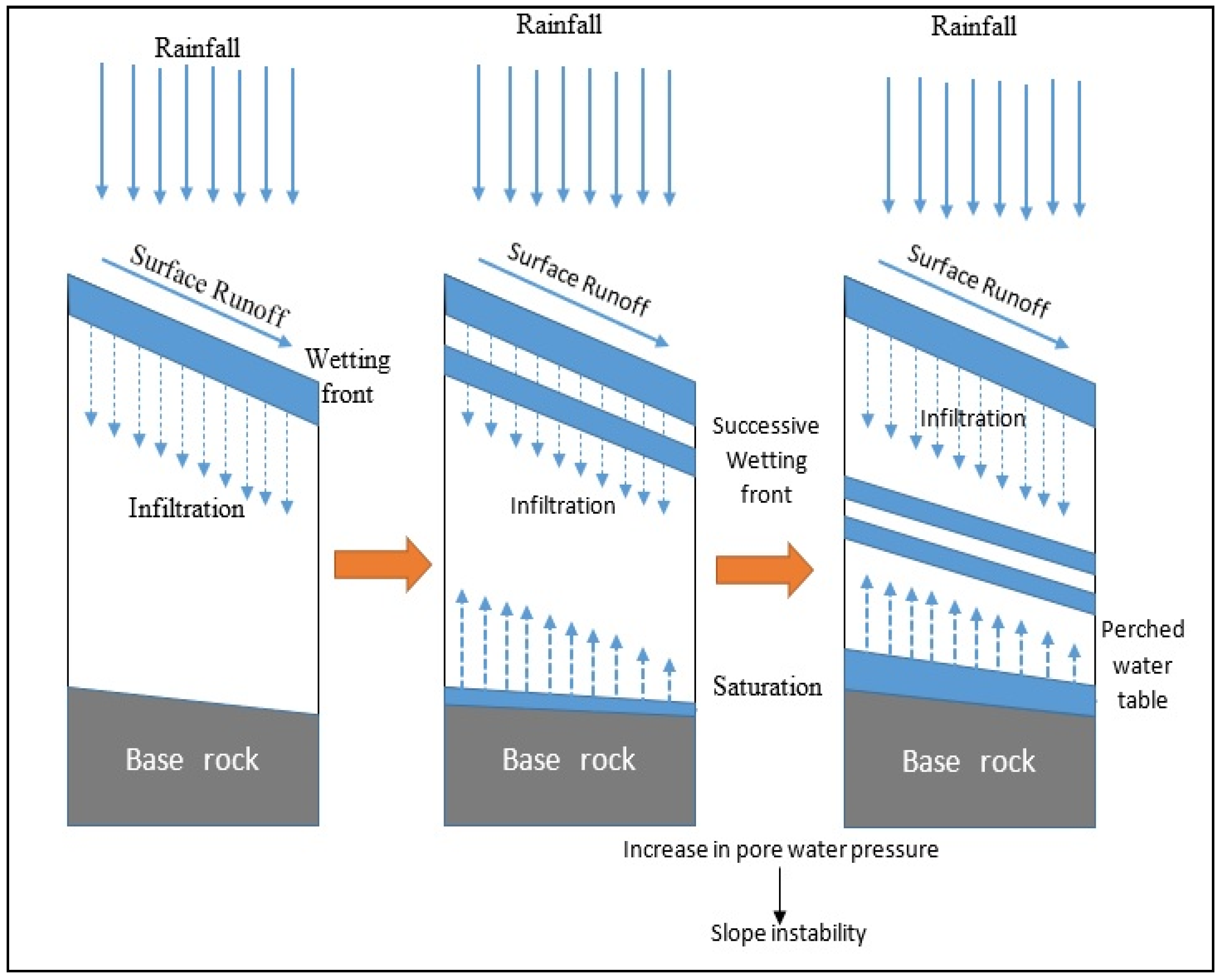
- The study proved that the cracks developed to cause deeper percolation, which leads to slope failure by generating the fluidization zone between the soil layer. Figure 24 explains the mechanism of landslide failure triggered by rainfall.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parkash, S. Historical Records of Socio-Economically Significant Landslides in India. J. South Asia Disaster Stud. 2011, 4, 177–204. [Google Scholar]
- Guerriero, L.; Prinzi, E.P.; Calcaterra, D.; Ciarcia, S.; Di Martire, D.; Guadagno, F.M.; Ruzza, G.; Revellino, P. Kinematics and Geologic Control of the Deep-Seated Landslide Affecting the Historic Center of Buonalbergo, Southern Italy. Geomorphology 2021, 394, 107961. [Google Scholar] [CrossRef]
- Smith, D.M.; Oommen, T.; Bowman, L.J.; Gierke, J.S.; Vitton, S.J. Hazard Assessment of Rainfall-Induced Landslides: A Case Study of San Vicente Volcano in Central El Salvador. Nat. Hazards 2015, 75, 2291–2310. [Google Scholar] [CrossRef]
- Froude, M.J.; Petley, D.N. Global Fatal Landslide Occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Dikshit, A.; Sarkar, R.; Pradhan, B.; Segoni, S.; Alamri, A.M. Rainfall Induced Landslide Studies in Indian Himalayan Region: A Critical Review. Appl. Sci. 2020, 10, 2466. [Google Scholar] [CrossRef]
- Kanungo, D.P.; Sharma, S. Rainfall Thresholds for Prediction of Shallow Landslides around Chamoli-Joshimath Region, Garhwal Himalayas, India. Landslides 2014, 11, 629–638. [Google Scholar] [CrossRef]
- Can, E. Investigation of Landslide Potential Parameters on Zonguldak-Ereǧli Highway and Adverse Effects of Landslides in the Region. Environ. Monit. Assess. 2014, 186, 2435–2447. [Google Scholar] [CrossRef]
- Teja, T.S.; Dikshit, A.; Satyam, N. Determination of Rainfall Thresholds for Landslide Prediction Using an Algorithm-Based Approach: Case Study in the Darjeeling Himalayas, India. Geosciences 2019, 9, 302. [Google Scholar] [CrossRef]
- Dikshit, A.; Sarkar, R.; Satyam, N. Probabilistic Approach toward Darjeeling Himalayas Landslides-A Case Study. Cogent Eng. 2018, 5, 1537539. [Google Scholar] [CrossRef]
- Chen, Y.; Li, B.; Xu, Y.; Zhao, Y.; Xu, J. Field Study on the Soil Water Characteristics of Shallow Layers on Red Clay Slopes and Its Application in Stability Analysis. Arab. J. Sci. Eng. 2019, 44, 5107–5116. [Google Scholar] [CrossRef]
- Guzzetti, F.; Peruccacci, S.; Rossi, M.; Stark, C.P. The Rainfall Intensity-Duration Control of Shallow Landslides and Debris Flows: An Update. Landslides 2008, 5, 3–17. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Rosi, A.; Pradhan, B.; Segoni, S. The Selection of Rain Gauges and Rainfall Parameters in Estimating Intensity-Duration Thresholds for Landslide Occurrence: Case Study from Wayanad (India). Water 2020, 12, 1000. [Google Scholar] [CrossRef]
- Lari, S.; Frattini, P.; Crosta, G.B. A Probabilistic Approach for Landslide Hazard Analysis. Eng. Geol. 2014, 182, 3–14. [Google Scholar] [CrossRef]
- Glade, T.; Crozier, M.; Smith, P. Applying Probability Determination to Refine Landslide-Triggering Rainfall Thresholds Using an Empirical “Antecedent Daily Rainfall Model”. Pure Appl. Geophys. 2000, 157, 1059–1079. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Pradhan, B.; Alamri, A.M. Forecasting of Landslides Using Rainfall Severity and Soil Wetness: A Probabilistic Approach for Darjeeling Himalayas. Water 2020, 12, 804. [Google Scholar] [CrossRef]
- Tufano, R.; Cesarano, M.; Fusco, F.; Vita, P. De Probabilistic Approaches for Assessing Rainfall Thresholds Triggering Shallow Landslides. The Study Case of the Peri-Vesuvian Area (Southern Italy). Ital. J. Eng. Geol. Environ. 2019, 2019, 105–110. [Google Scholar] [CrossRef]
- Capparelli, G.; Tiranti, D. Application of the MoniFLaIR Early Warning System for Rainfall-Induced Landslides in Piedmont Region (Italy). Landslides 2010, 7, 401–410. [Google Scholar] [CrossRef]
- Dikshit, A.; Satyam, N. Application of FLaIR Model for Early Warning System in Chibo Pashyor, Kalimpong, India for Rainfall-Induced Landslides. Nat. Hazards Earth Syst. Sci. Discuss. 2017, 295. [Google Scholar] [CrossRef]
- Panchal, S.; Shrivastava, A.K. A Comparative Study of Frequency Ratio, Shannon’s Entropy and Analytic Hierarchy Process (Ahp) Models for Landslide Susceptibility Assessment. ISPRS Int. J. Geo-Inf. 2021, 10, 603. [Google Scholar] [CrossRef]
- Das, S.; Sarkar, S.; Kanungo, D.P. GIS-Based Landslide Susceptibility Zonation Mapping Using the Analytic Hierarchy Process (AHP) Method in Parts of Kalimpong Region of Darjeeling Himalaya. Environ. Monit. Assess. 2022, 194, 234. [Google Scholar] [CrossRef]
- Ibrahim, M.B.; Mustaffa, Z.; Balogun, A.B.; Indra, S.H.H.; Nur Ain, A. Landslide’s Analysis and Hazard Mapping Based on ANALYTIC HIERARCHY PROCESS (AHP) Using GIS, in Lawas, Sabah-Sarawak. IOP Conf. Ser. Earth Environ. Sci. 2022, 1064, 012031. [Google Scholar] [CrossRef]
- Selamat, S.N.; Majid, N.A.; Taha, M.R.; Osman, A. Application of Geographical Information System (GIS) Using Artificial Neural Networks (ANN) for Landslide Study in Langat Basin, Selangor. IOP Conf. Ser. Earth Environ. Sci. 2022, 1064, 012052. [Google Scholar] [CrossRef]
- Pradhan, B.; Al-Najjar, H.A.H.; Sameen, M.I.; Mezaal, M.R.; Alamri, A.M. Landslide Detection Using a Saliency Feature Enhancement Technique from LiDAR-Derived DEM and Orthophotos. IEEE Access 2020, 8, 121942–121954. [Google Scholar] [CrossRef]
- Singh, N.; Gupta, S.K.; Shukla, D.P. Analysis of Landslide Reactivation Using Satellite Data: A Case Study of Kotrupi Landslide, Mandi, Himachal Pradesh, India. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 137–142. [Google Scholar] [CrossRef]
- Tiwari, B.; Ajmera, B. Physical Modelling of Rain-Induced Landslides. In Landslide Dynamics: ISDR-ICL Landslide Interactive Teaching Tools; Springer: Cham, Switzerland, 2018; pp. 277–285. [Google Scholar]
- Matziaris, V.; Marshall, A.M.; Heron, C.M.; Yu, H.S. Centrifuge Model Study of Thresholds for Rainfall-Induced Landslides in Sandy Slopes. IOP Conf. Ser. Earth Environ. Sci. 2015, 26, 012032. [Google Scholar] [CrossRef]
- Li, C.; Yao, D.; Wang, Z.; Liu, C.; Wuliji, N.; Yang, L.; Li, L.; Amini, F. Model Test on Rainfall-Induced Loess–Mudstone Interfacial Landslides in Qingshuihe, China. Environ. Earth Sci. 2016, 75, 835. [Google Scholar] [CrossRef]
- Huang, X.; Dong, Y. Study on Physical and Mechanical Properties of Soil in a Loess Landslide. J. Phys. Conf. Ser. 2023, 2424, 012010. [Google Scholar] [CrossRef]
- Rahardjo, H.; Ong, T.H.; Rezaur, R.B.; Leong, E.C. Factors Controlling Instability of Homogeneous Soil Slopes under Rainfall. J. Geotech. Geoenviron. Eng. 2007, 133, 1532–1543. [Google Scholar] [CrossRef]
- Acharya, K.P.; Bhandary, N.P.; Dahal, R.K.; Yatabe, R. Seepage and Slope Stability Modelling of Rainfall-Induced Slope Failures in Topographic Hollows. Geomat. Nat. Hazards Risk 2016, 7, 721–746. [Google Scholar] [CrossRef]
- Singh, A.K.; Kundu, J.; Sarkar, K. Stability Analysis of a Recurring Soil Slope Failure along NH-5, Himachal Himalaya, India. Nat. Hazards 2018, 90, 863–885. [Google Scholar] [CrossRef]
- Paswan, A.P.; Shrivastava, A.K. Stability Analysis of Rainfall-Induced Landslide. In Proceedings of the 3rd International Online Conference on Emerging Trends in Multi-Disciplinary Research “ETMDR-2022”, Jaipur, Rajasthan, India, 20–22 January 2022; pp. 505–509. [Google Scholar]
- Paswan, A.P.; Shrivastava, A.K. Numerical Modelling of Rainfall-Induced Landslide. In Proceedings of the International e-Conference on Sustainable Development & Recent Trends in Civil Engineering, New Delhi, India, 4–5 January 2022; pp. 8–13. [Google Scholar]
- Jing, F.; Ling, H.S.; Xiuli, D.; Jinlong, W. Influence of Rainfall on Transient Seepage Field of Deep Landslides: A Case Study of Area II of Jinpingzi Landslide. IOP Conf. Ser. Earth Environ. Sci. 2020, 570, 022056. [Google Scholar] [CrossRef]
- Tufano, R.; Formetta, G.; Calcaterra, D.; De Vita, P. Hydrological Control of Soil Thickness Spatial Variability on the Initiation of Rainfall-Induced Shallow Landslides Using a Three-Dimensional Model. Landslides 2021, 18, 3367–3380. [Google Scholar] [CrossRef]
- Paswan, A.P.; Shrivastava, A.K. Modelling of Rainfall - Induced Landslide: A Threshold-Based Approach. Arab. J. Geosci. 2022, 15, 795. [Google Scholar] [CrossRef]
- Dahal, R.K.; Hasegawa, S.; Nonomura, A.; Yamanaka, M.; Masuda, T.; Nishino, K. Failure Characteristics of Rainfall-Induced Shallow Landslides in Granitic Terrains of Shikoku Island of Japan. Environ. Geol. 2009, 56, 1295–1310. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Mugnai, F.; Fanti, R.; Casagli, N. Design and Implementation of a Landslide Early Warning System. Eng. Geol. 2012, 147–148, 124–136. [Google Scholar] [CrossRef]
- Zhi, M.; Shang, Y.; Zhao, Y.; Lü, Q.; Sun, H. Investigation and Monitoring on a Rainfall-Induced Deep-Seated Landslide. Arab. J. Geosci. 2016, 9, 182. [Google Scholar] [CrossRef]
- Kanungo, D.P.; Maletha, A.K.; Singh, M. Ground Based Wireless Instrumentation and Real Time Monitoring of Pakhi Landslide, Garhwal Himalayas, Uttarakhand (India). In Advancing Culture of Living with Landslides; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Guerriero, L.; Guerriero, G.; Grelle, G.; Guadagno, F.M.; Revellino, P. Brief Communication: A Low-Cost Arduino®-Based Wire Extensometer for Earth Flow Monitoring. Nat. Hazards Earth Syst. Sci. 2017, 17, 881–885. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Pradhan, B.; Alamri, A.M. Iot-Based Geotechnical Monitoring of Unstable Slopes for Landslide Early Warning in the Darjeeling Himalayas. Sensors 2020, 20, 2611. [Google Scholar] [CrossRef] [PubMed]
- Uchimura, T.; Towhata, I.; Anh, T.T.L.; Fukuda, J.; Bautista, C.J.B.; Wang, L.; Seko, I.; Uchida, T.; Matsuoka, A.; Ito, Y.; et al. Simple Monitoring Method for Precaution of Landslides Watching Tilting and Water Contents on Slopes Surface. Landslides 2010, 7, 351–357. [Google Scholar] [CrossRef]
- Qiao, S.; Feng, C.; Yu, P.; Tan, J.; Uchimura, T.; Wang, L.; Tang, J.; Shen, Q.; Xie, J. Investigation on Surface Tilting in the Failure Process of Shallow Landslides. Sensors 2020, 20, 2662. [Google Scholar] [CrossRef]
- Artese, G.; Perrelli, M.; Artese, S.; Meduri, S.; Brogno, N. POIS, a Low Cost Tilt and Position Sensor: Design and First Tests. Sensors 2015, 15, 10806–10824. [Google Scholar] [CrossRef]
- Dikshit, A.; Satyam, D.N.; Towhata, I. Early Warning System Using Tilt Sensors in Chibo, Kalimpong, Darjeeling Himalayas, India. Nat. Hazards 2018, 94, 727–741. [Google Scholar] [CrossRef]
- Dahal, R.K. Rainfall-Induced Landslides in Nepal. Int. J. Eros. Control Eng. 2012, 5, 1–8. [Google Scholar] [CrossRef]
- Kelleners, T.J.; Soppe, R.W.O.; Robinson, D.A.; Schaap, M.G.; Ayars, J.E.; Skaggs, T.H. Calibration of Capacitance Probe Sensors Using Electric Circuit Theory. Soil Sci. Soc. Am. J. 2004, 68, 430–439. [Google Scholar] [CrossRef]
- Placidi, P.; Gasperini, L.; Grassi, A.; Cecconi, M.; Scorzoni, A. Characterization of Low-Cost Capacitive Soil Moisture Sensors for IoT Networks. Sensors 2020, 20, 3585. [Google Scholar] [CrossRef]
- Hrisko, J. Capacitive Soil Moisture Sensor Calibration with Arduino; Maker Portal LLC: New York, NY, USA, 2020; pp. 1–24. [Google Scholar]
- Ida, N. Engineering Electromagnetics; Springer: Cham, Switzerland, 2015; ISBN 9783319078052. [Google Scholar]
- DFROBOT Capacitive Soil Moisture Sensor SKU:SEN0193 v.2.0. Available online: https://wiki.dfrobot.com/Capacitive_Soil_Moisture_Sensor_SKU_SEN0193 (accessed on 21 November 2022).
- Ilamkar, P.T.; Kohli, A. Report on Geological Assessment of Kotrupi Landslide, Mandi—Jogindernagar—Pathankot National Highway (N.H.-154), Tehsil Padhar, District Mandi, Himachal Pradesh. Geol. Surv. India 2017, 6, 5–9. [Google Scholar]
- ISRO Kotrupi Landslide, Mandi District, Himachal Pradesh, A Preliminary Report; National Remote Sensing Centre/ISRO: Hyderabad, India, 2017; Volume 2, pp. 4–6.
- Prakash, S.; Kathait, A. A Case Study on Kotrupi Landslide 2017, Mandi District, Himachal Pradesh National; National Institute of Disaster Management (NIDM), Ministry of Home Affairs, Government of India: New Delhi, India, 2021; ISBN 9789382571612. [Google Scholar]
- QGIS Development Team. QGIS Desktop 3.16 User Guide; Free Software Foundation: Boston, MA, USA, 2021; p. 1335. Available online: https://docs.qgis.org/3.16/pdf/en/QGIS-3.16-DesktopUserGuide-en.pdf (accessed on 21 November 2022).
- IS:2720 (Part 4); Methods of Test for Soils, Part 4: Grain Size Analysis. Bureau of Indian Standard: New Delhi, India, 1985; pp. 1–38.
- GEO-SLOPE International Ltd. Seepage Modeling with SEEP/W 2015; Geostudio Help—GEO-SLOPE International Ltd.: Calgary, AB, Canada, 2012; p. 199. [Google Scholar]
- IS: 2720 (Part 5); Determination of Liquid and Plastic Limit. Bureau of Indian Standard: New Delhi, India, 1985; pp. 1–16.
- IS: 2720 (Part 7-1980); Determination of Water Content-Dry Density Relation Using Light Compaction. Bureau of Indian Standard: New Delhi, India, 2011; pp. 1–16.
- Sharma, P.; Rawat, S.; Gupta, A.K. Study and Remedy of Kotropi Landslide in Himachal Pradesh, India. Indian Geotech. J. 2019, 49, 603–619. [Google Scholar] [CrossRef]
- Anderson, S.A.; Sitar, N. Analysis of Rainfall-Induced Debris Flows. J. Geotech. Eng. 1995, 121, 544–552. [Google Scholar] [CrossRef]
- IS: 2720 (Part 11); Determination of the Shear Strength Parameters of a Specimen Tested in Unconsolidated Undrained Triaxial Compression without the Measurement of Pore Water Pressure. Bureau of Indian Standard: New Delhi, India, 1993.
- Askarinejad, A.; Laue, J.; Zweidler, A.; Iten, M.; Bleiker, E.; Buschor, H.; Springman, S.M. Physical Modelling of Rainfall Induced Landslides under Controlled Climatic Conditions. In Proceedings of the Eurofuge 2012, 2nd Eurofuge Conference on Physical Modelling in Geotechnics, Deltares, Delft, The Netherlands, 23–24 April 2012. [Google Scholar]
- Luo, Y.; He, S.M.; Chen, F.Z.; Li, X.P.; He, J.C. A Physical Model Considered the Effect of Overland Water Flow on Rainfall-Induced Shallow Landslides. Geoenviron. Disasters 2015, 2, 8. [Google Scholar] [CrossRef]
- Iverson, R.M. Landslide Triggering by Rain Infiltration. Water Resour. Res. 2000, 36, 1897–1910. [Google Scholar] [CrossRef]
- Godt, J.W.; Baum, R.L.; Lu, N. Landsliding in Partially Saturated Materials. Geophys. Res. Lett. 2009, 36, L02403. [Google Scholar] [CrossRef]
- Pradhan, S.P.; Panda, S.D.; Roul, A.R.; Thakur, M. Insights into the Recent Kotropi Landslide of August 2017, India: A Geological Investigation and Slope Stability Analysis. Landslides 2019, 16, 1529–1537. [Google Scholar] [CrossRef]
- Mali, N.; Shukla, D.P.; Kala, V.U. Identifying Geotechnical Characteristics for Landslide Hazard Indication: A Case Study in Mandi, Himachal Pradesh, India. Arab. J. Geosci. 2022, 15, 144. [Google Scholar] [CrossRef]
- Uchimura, T.; Towhata, I.; Wang, L.; Nishie, S.; Yamaguchi, H.; Seko, I.; Qiao, J. Precaution and Early Warning of Surface Failure of Slopes Using Tilt Sensors. Soils Found. 2015, 55, 1086–1099. [Google Scholar] [CrossRef]
- Dixon, N.; Smith, A.; Flint, J.A.; Khanna, R.; Clark, B.; Andjelkovic, M. An Acoustic Emission Landslide Early Warning System for Communities in Low-Income and Middle-Income Countries. Landslides 2018, 15, 1631–1644. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paswan, A.P.; Shrivastava, A.K. Evaluation of a Tilt-Based Monitoring System for Rainfall-Induced Landslides: Development and Physical Modelling. Water 2023, 15, 1862. https://doi.org/10.3390/w15101862
Paswan AP, Shrivastava AK. Evaluation of a Tilt-Based Monitoring System for Rainfall-Induced Landslides: Development and Physical Modelling. Water. 2023; 15(10):1862. https://doi.org/10.3390/w15101862
Chicago/Turabian StylePaswan, Abhishek Prakash, and Amit Kumar Shrivastava. 2023. "Evaluation of a Tilt-Based Monitoring System for Rainfall-Induced Landslides: Development and Physical Modelling" Water 15, no. 10: 1862. https://doi.org/10.3390/w15101862