


Determination of River Hydromorphological Features in Low-Land Rivers from Aerial Imagery and Direct Measurements Using Machine Learning Algorithms

 ,
, 
 ,
,  ,
,  , , and
, , and
Abstract
:1. Introduction
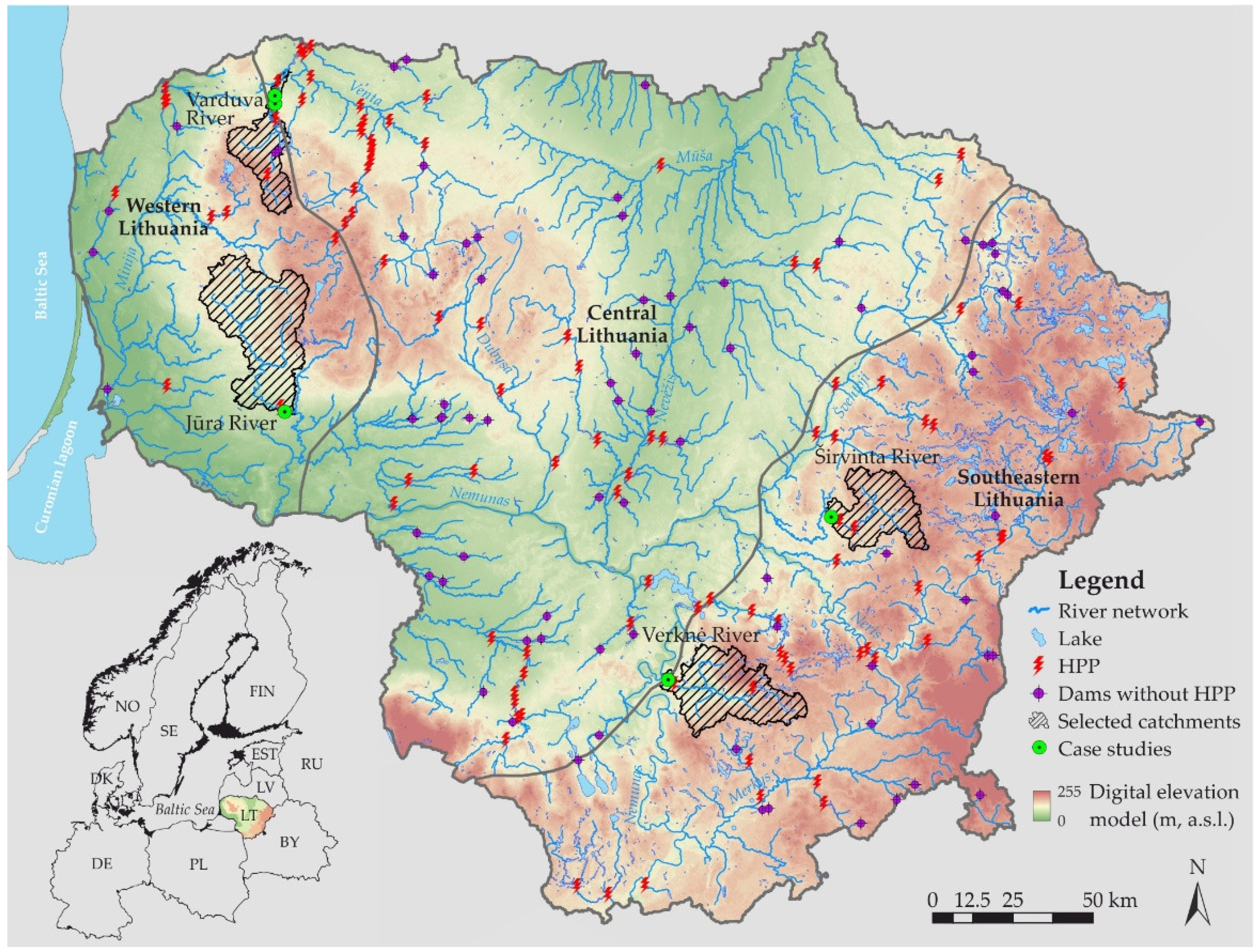
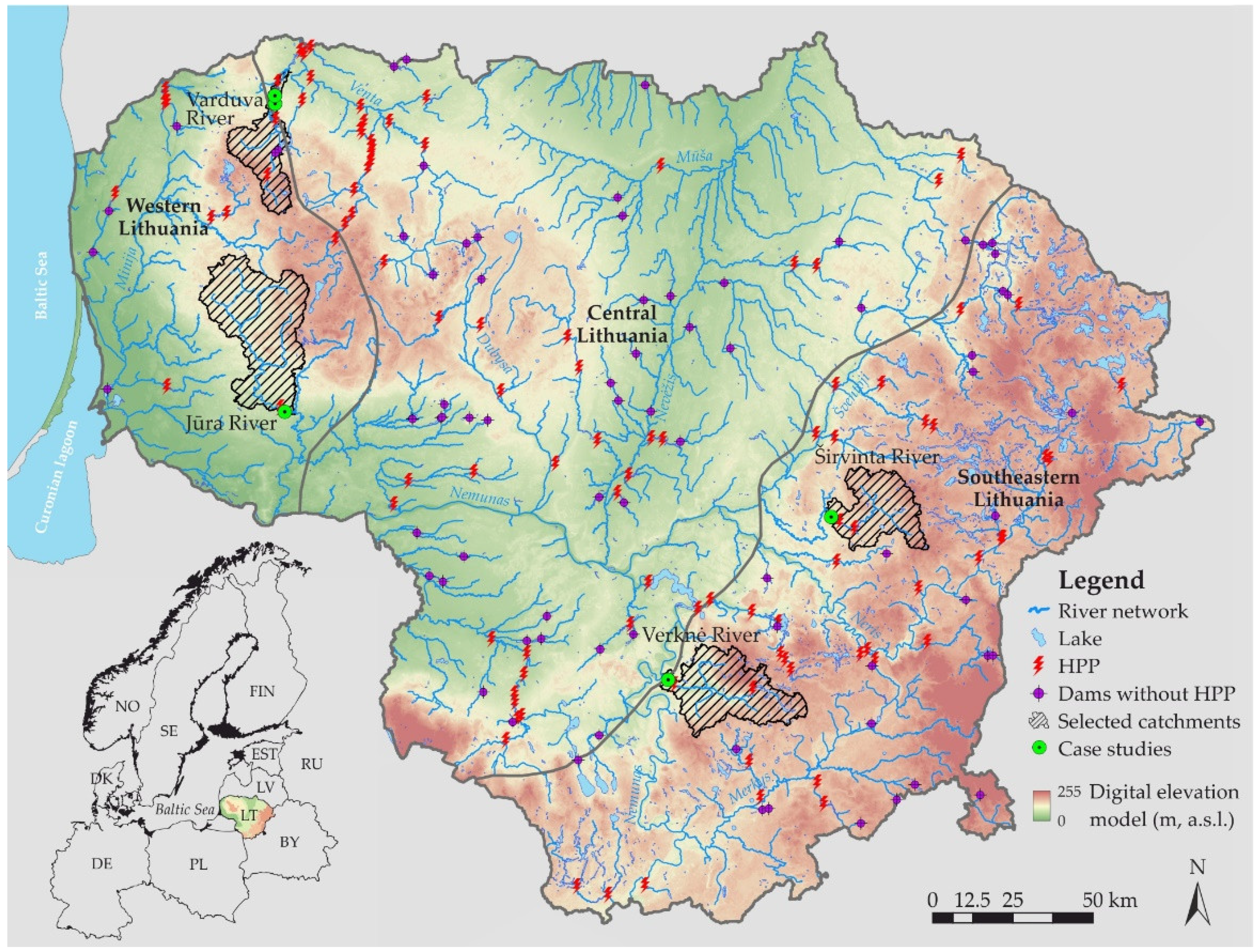
2. Study Area and Methods
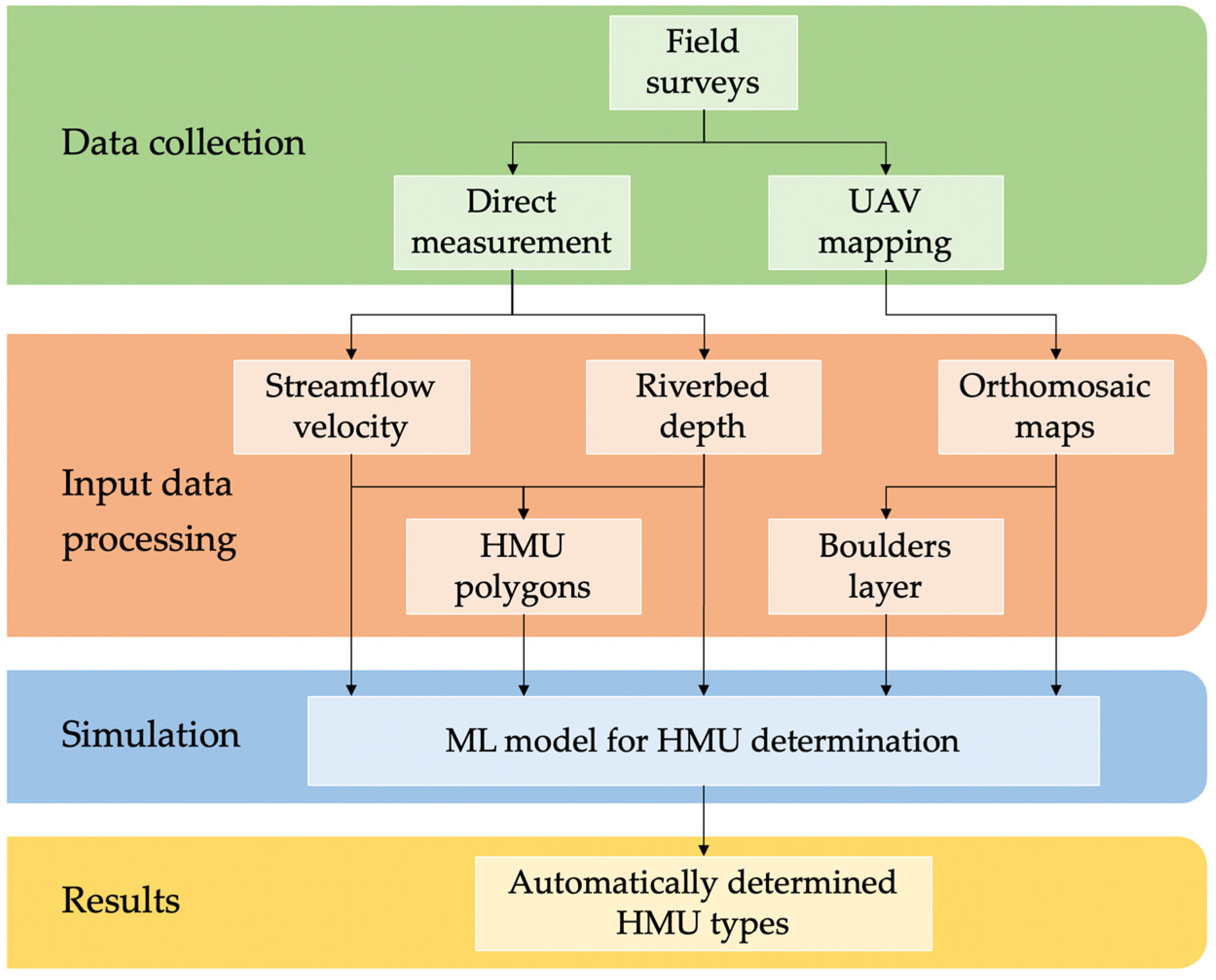
2.1. Direct Measurements of Hydraulic Parameters and HMU Mapping
2.2. Aerial Mapping with UAV
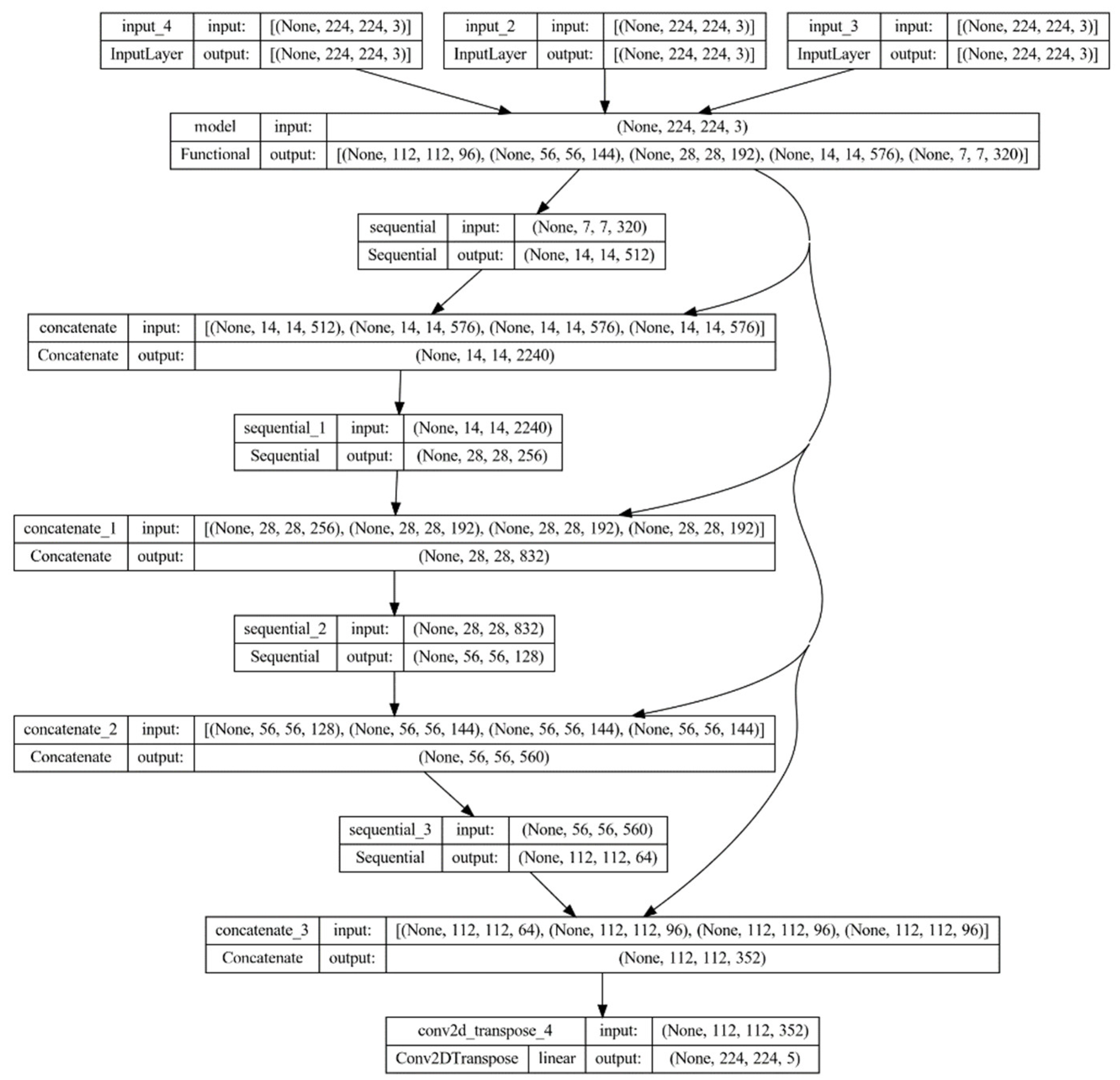
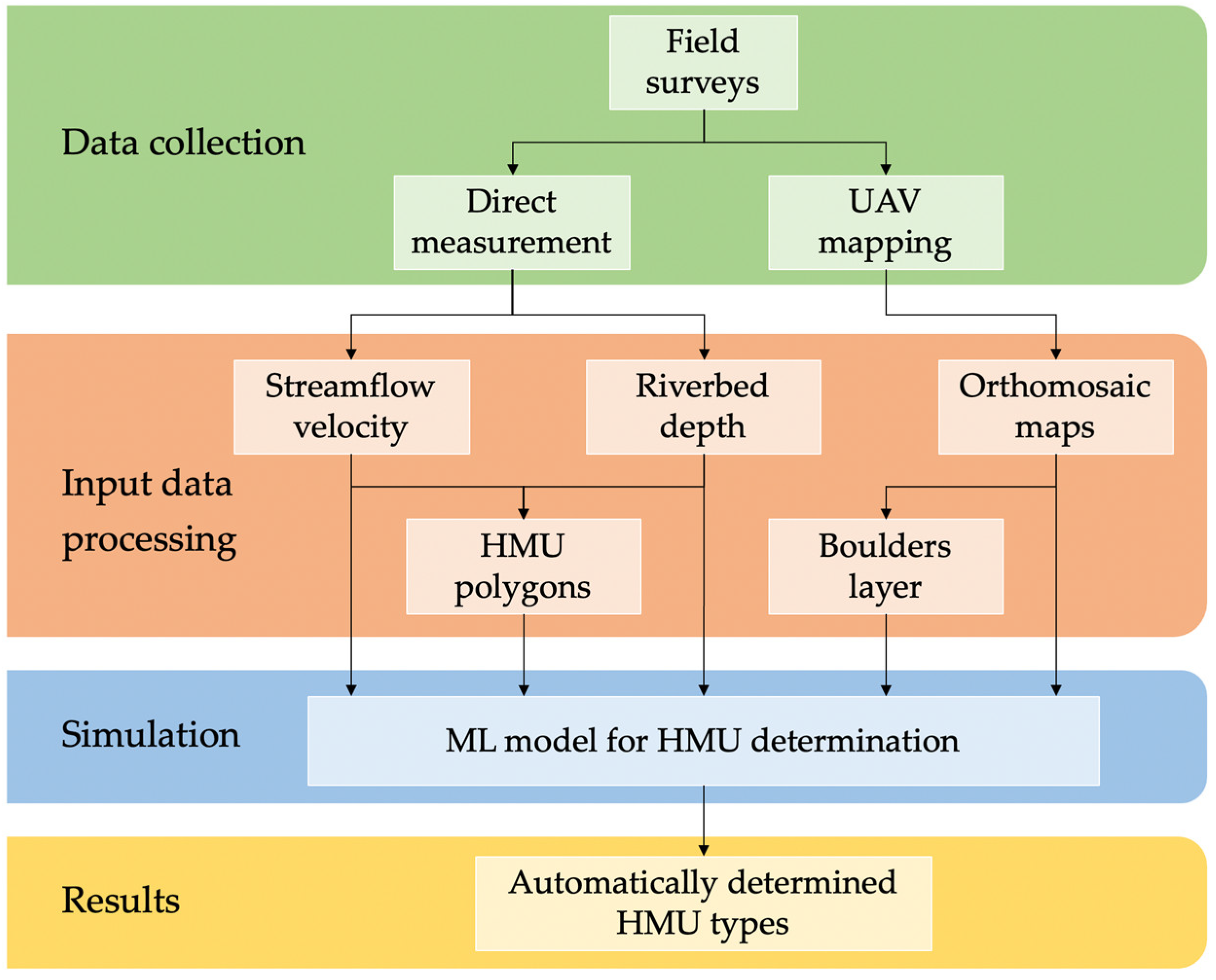
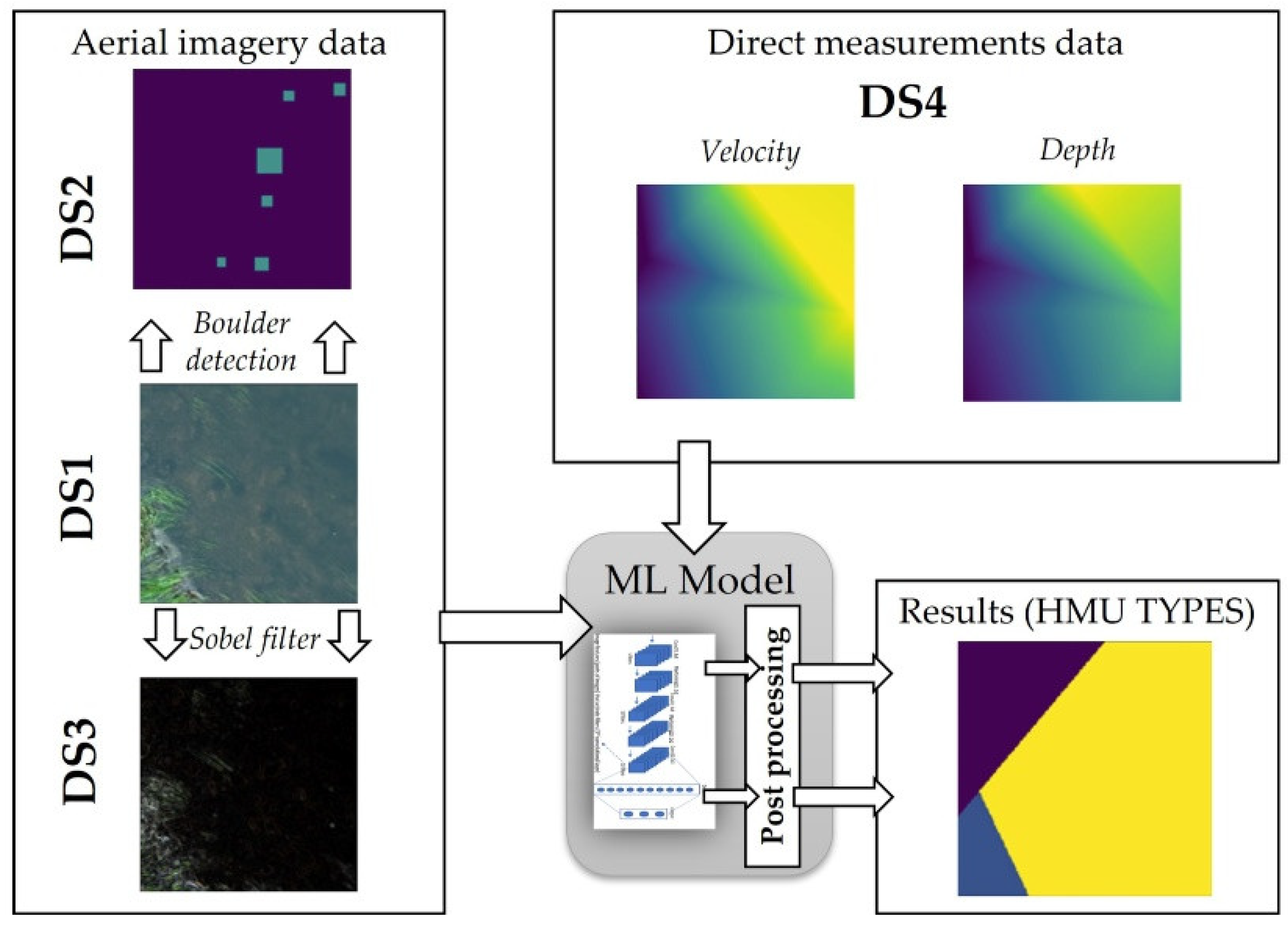
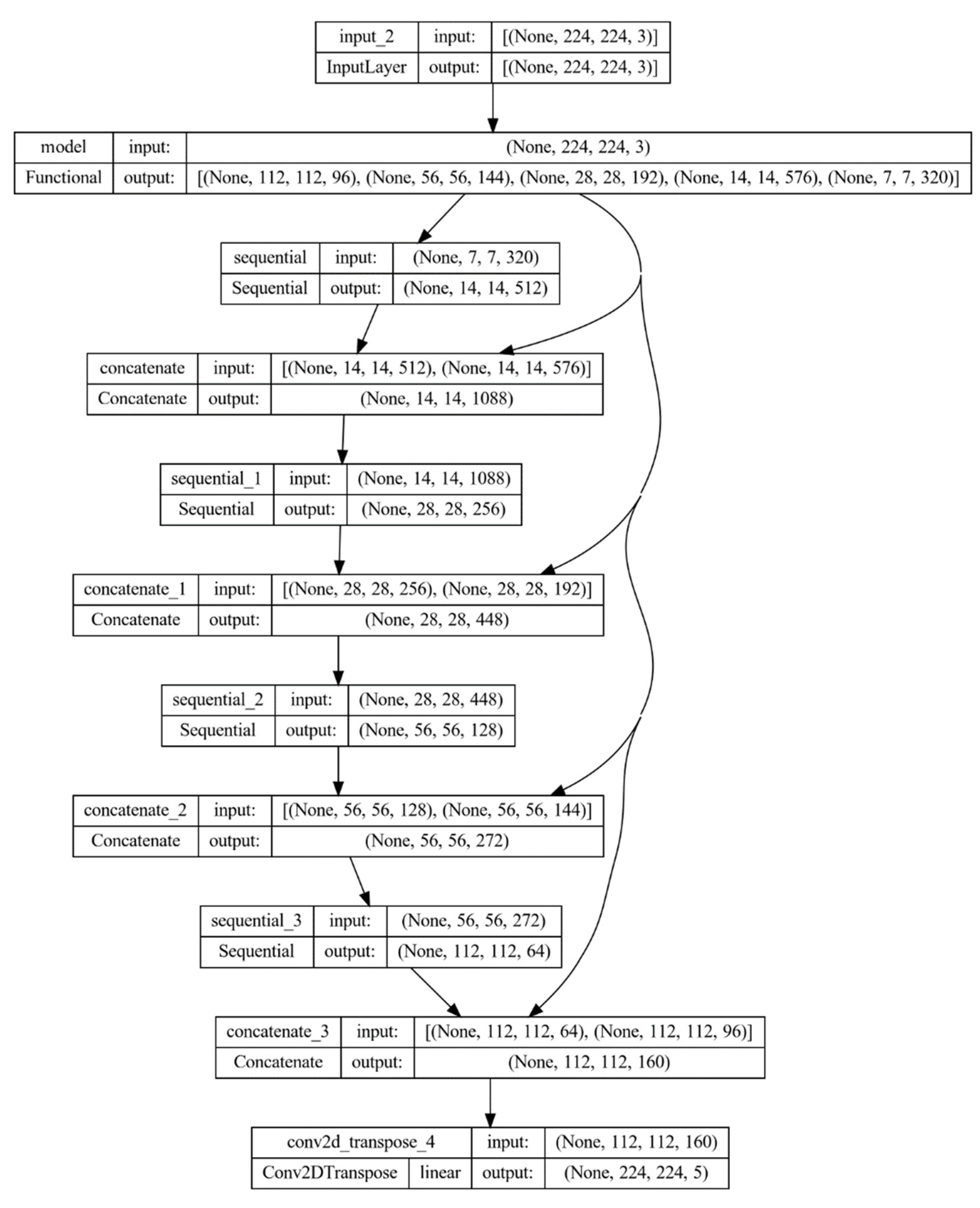
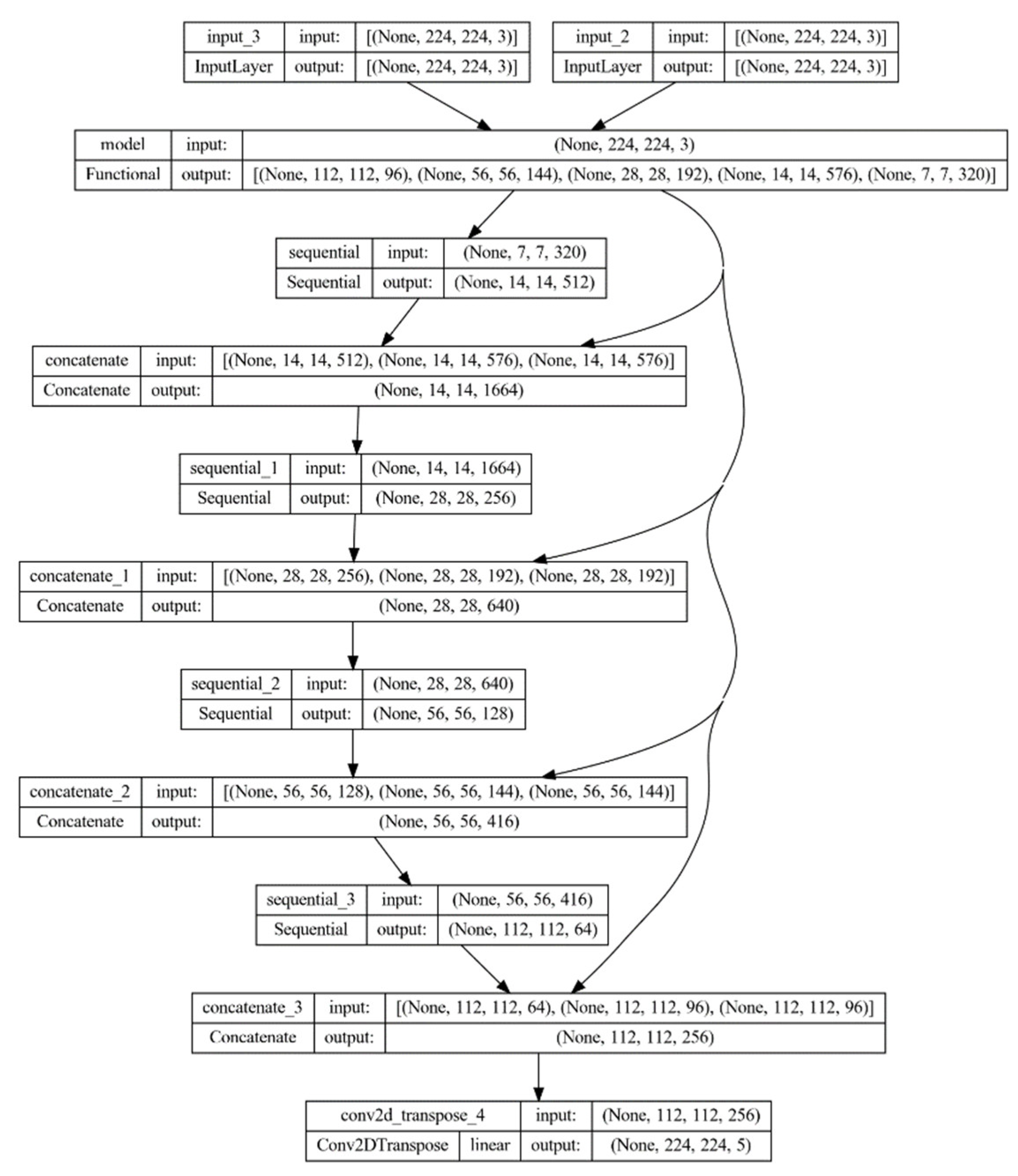
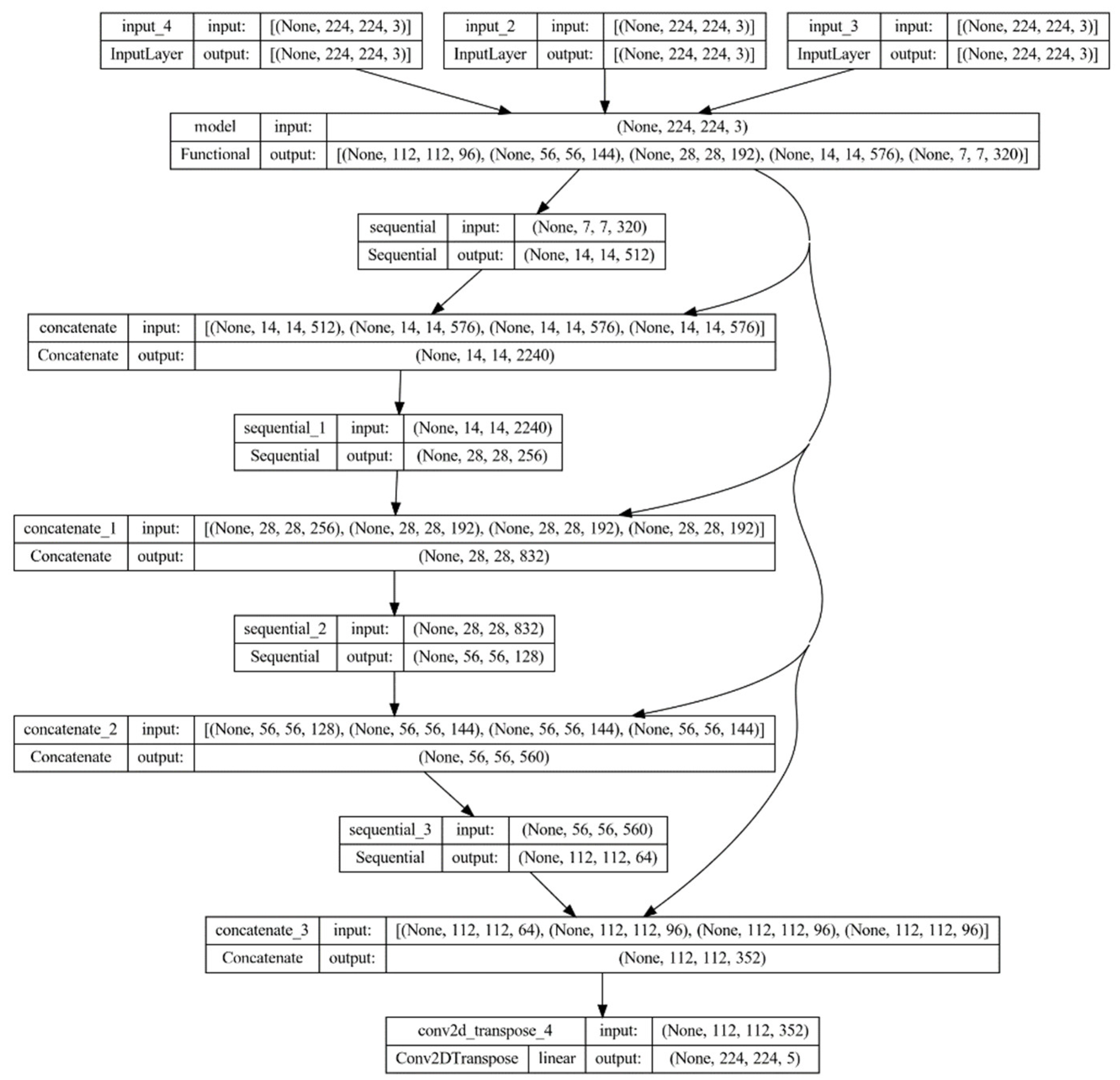
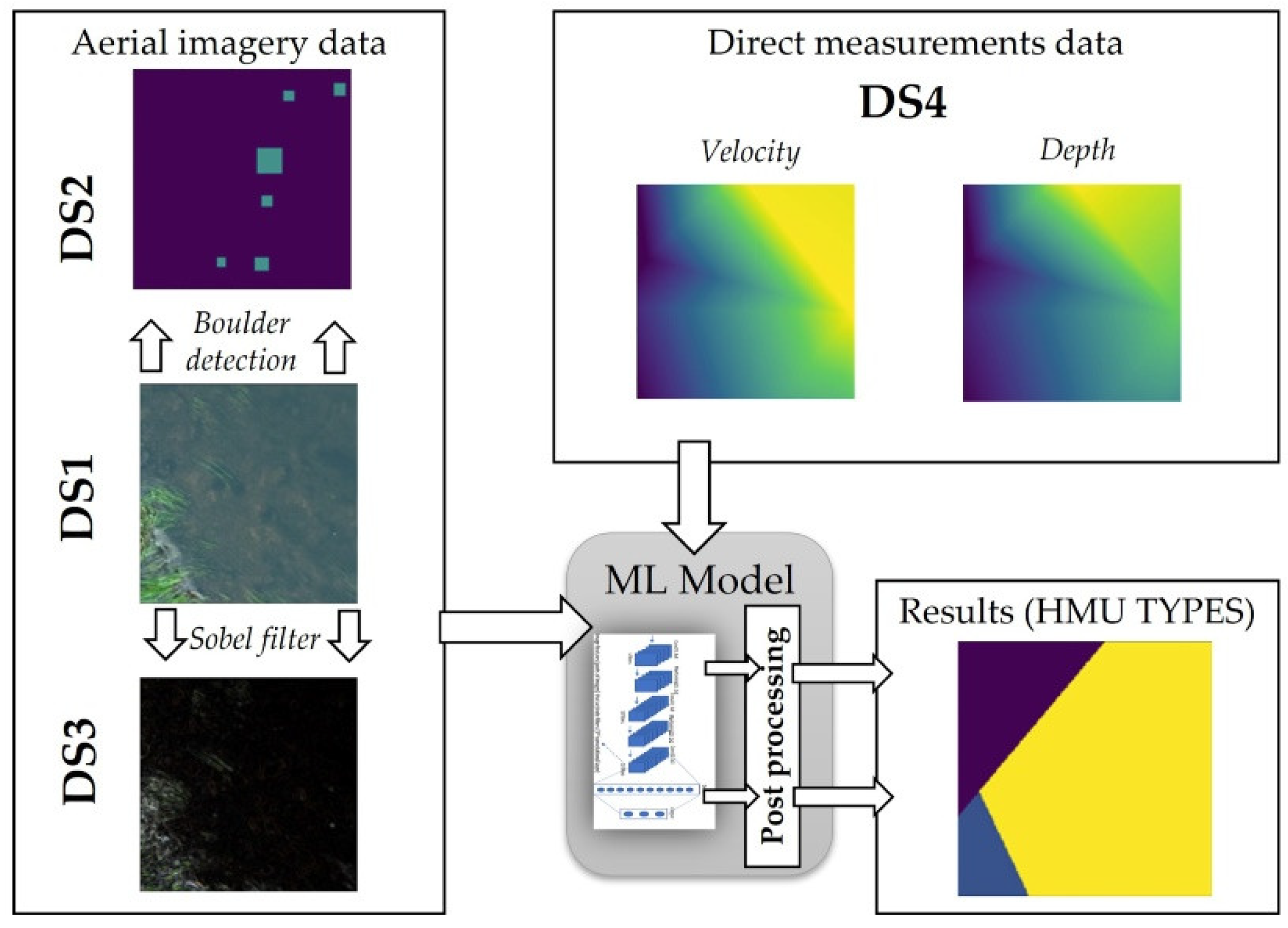
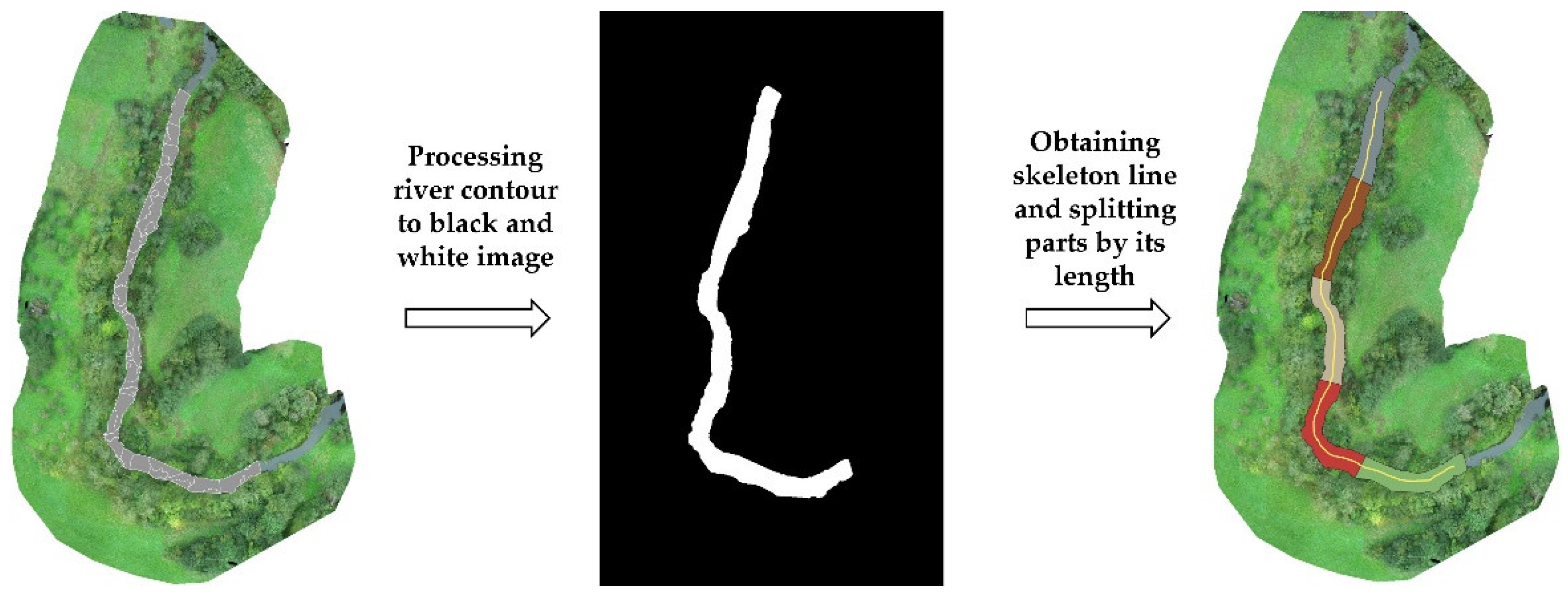
2.3. Automatic Detection of Boulders and HMU Determination from Aerial Imagery and Direct Measurements Data
2.4. Validation and Analysis of Results
- Boulder detection problem—taking N random points from the area under investigation and crop squared images around it. If a warped image contained no boulders, it was dropped from the dataset. Standard data augmentation procedure from YOLOv5 has been used, where a mosaic of original and three random images was loaded in training procedure.
- HMU segmentation problem—to apply augmentation in dataset preparation phase (different data source for model training requires same data transformation), the dataset was formatted by sliding 240 × 240 px window with a vertical and horizontal stride of 80 px. Only the areas which have at least 50% of actual data (visible water area with mapped HMU types) were included in the final dataset. Then, rotation augmentation was applied with image rotated by the step of 60°, that is, angles equal to 0°, 60°, 120°, 180°, 240° and 300°. The final 240 × 240 image has been cropped after rotation of a twice-larger image to avoid cases with no-data at squared image corners.
3. Results
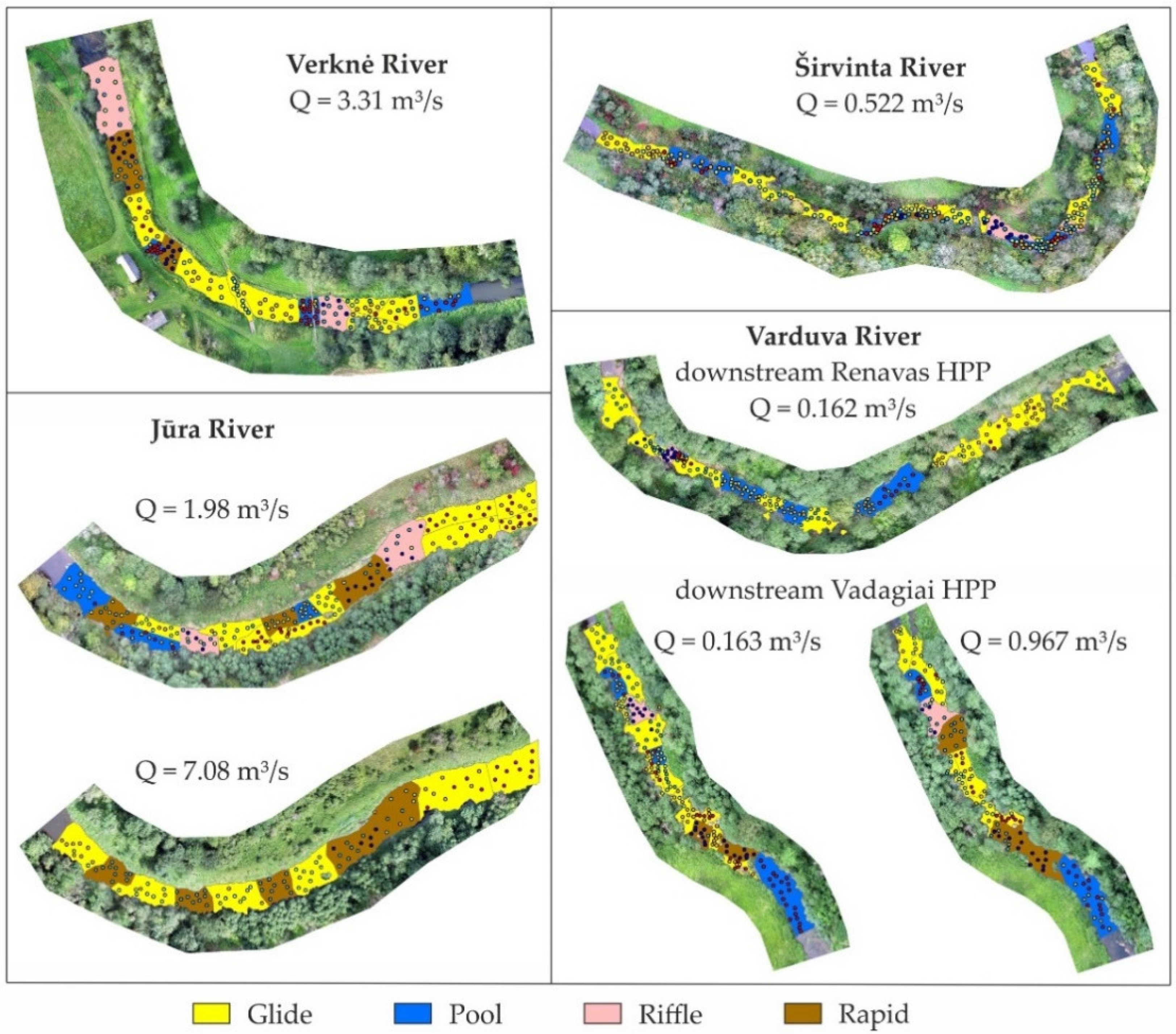
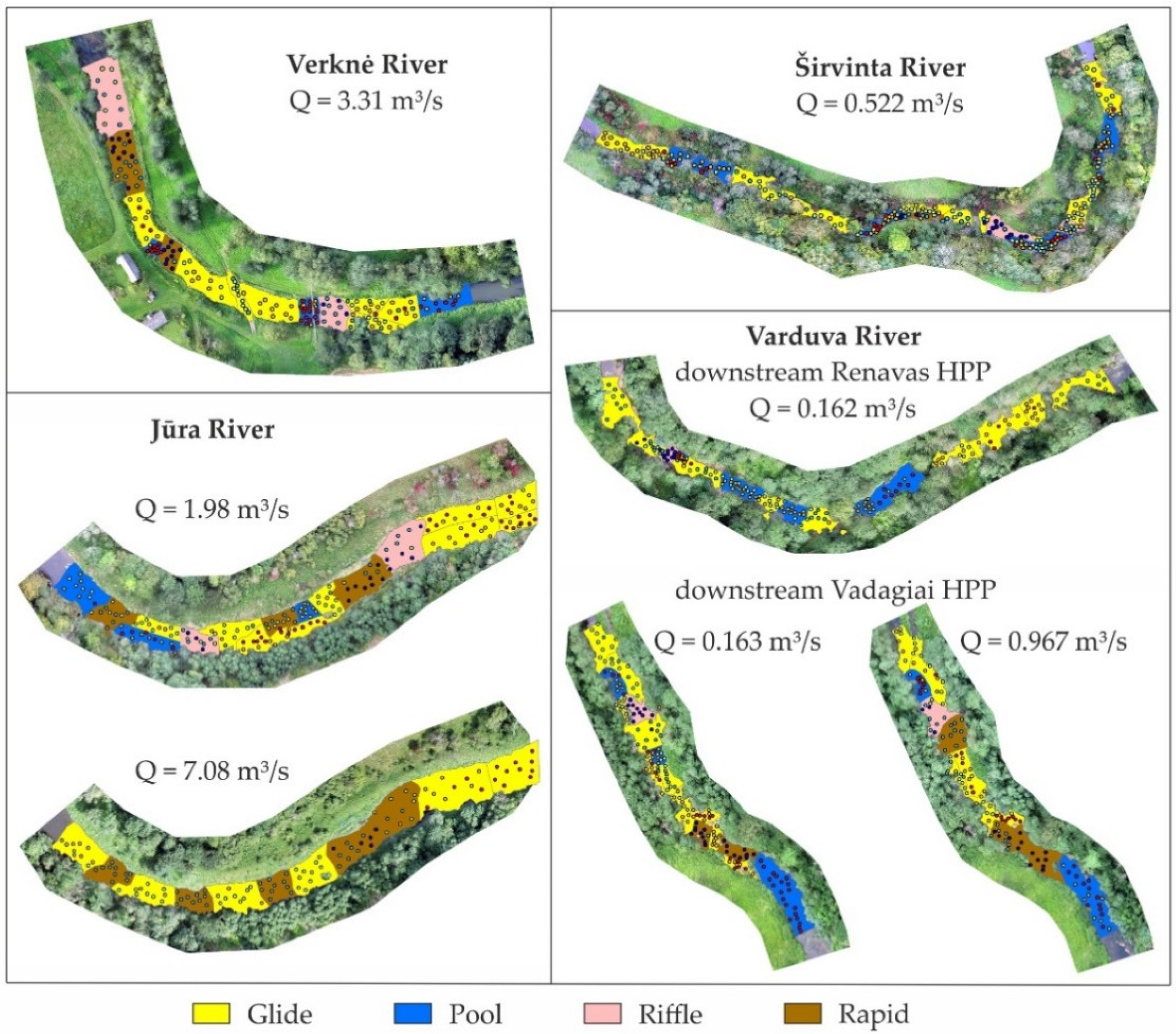
3.1. Distribution of the Hydromorphological Units
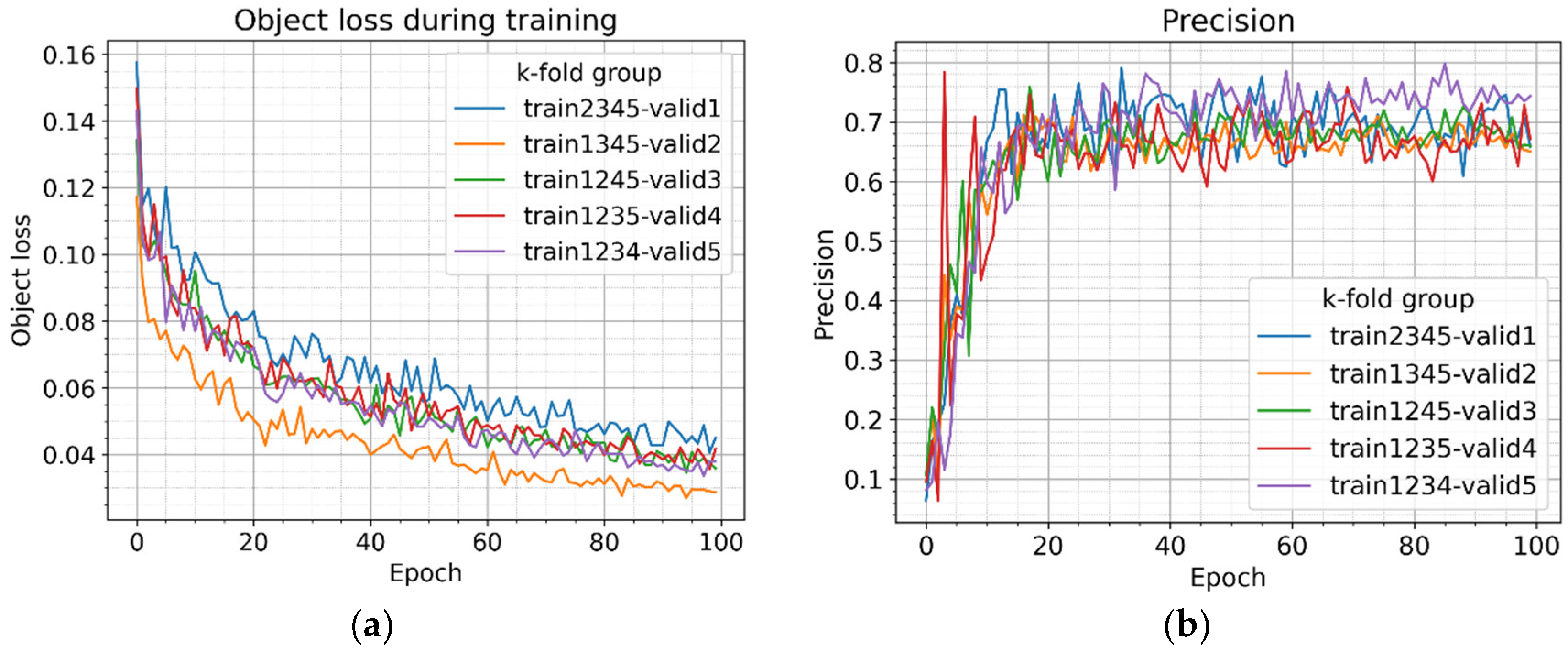
3.2. Construction of Folds for Cross-Validation
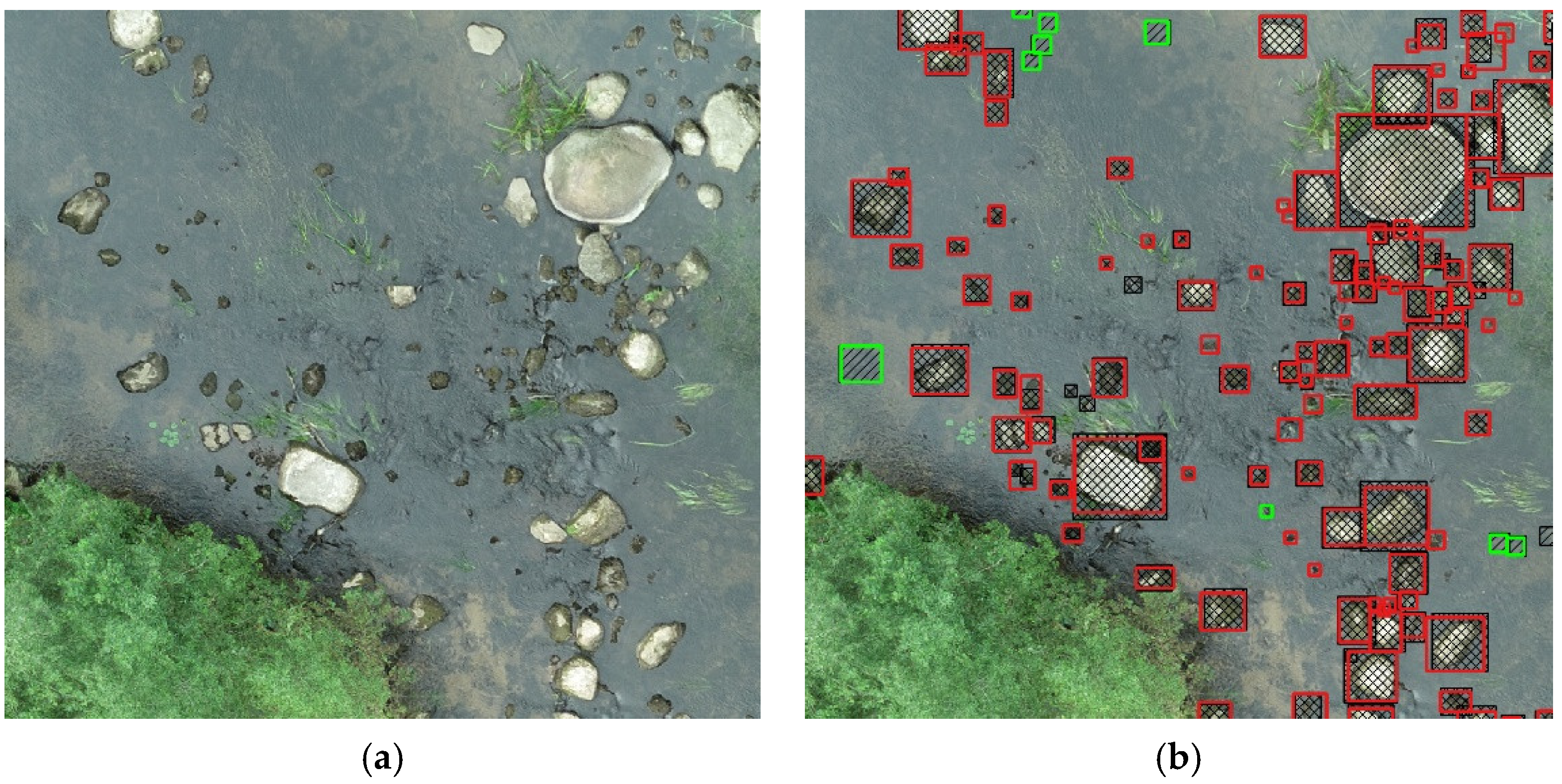
3.3. Boulder Detection and Formation of DS3 Layers
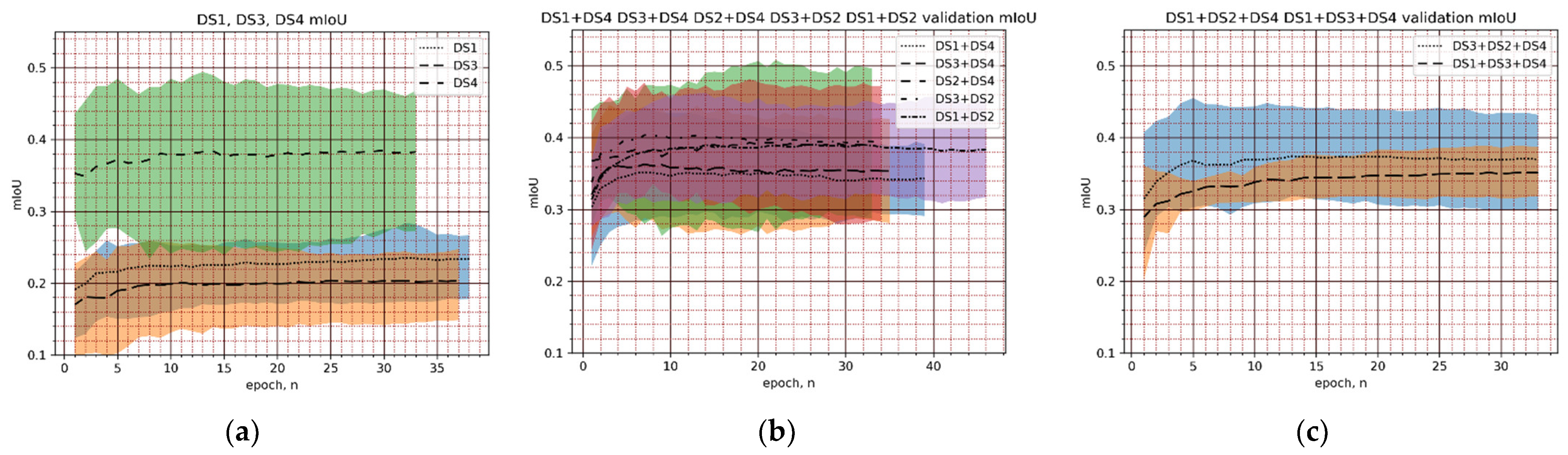
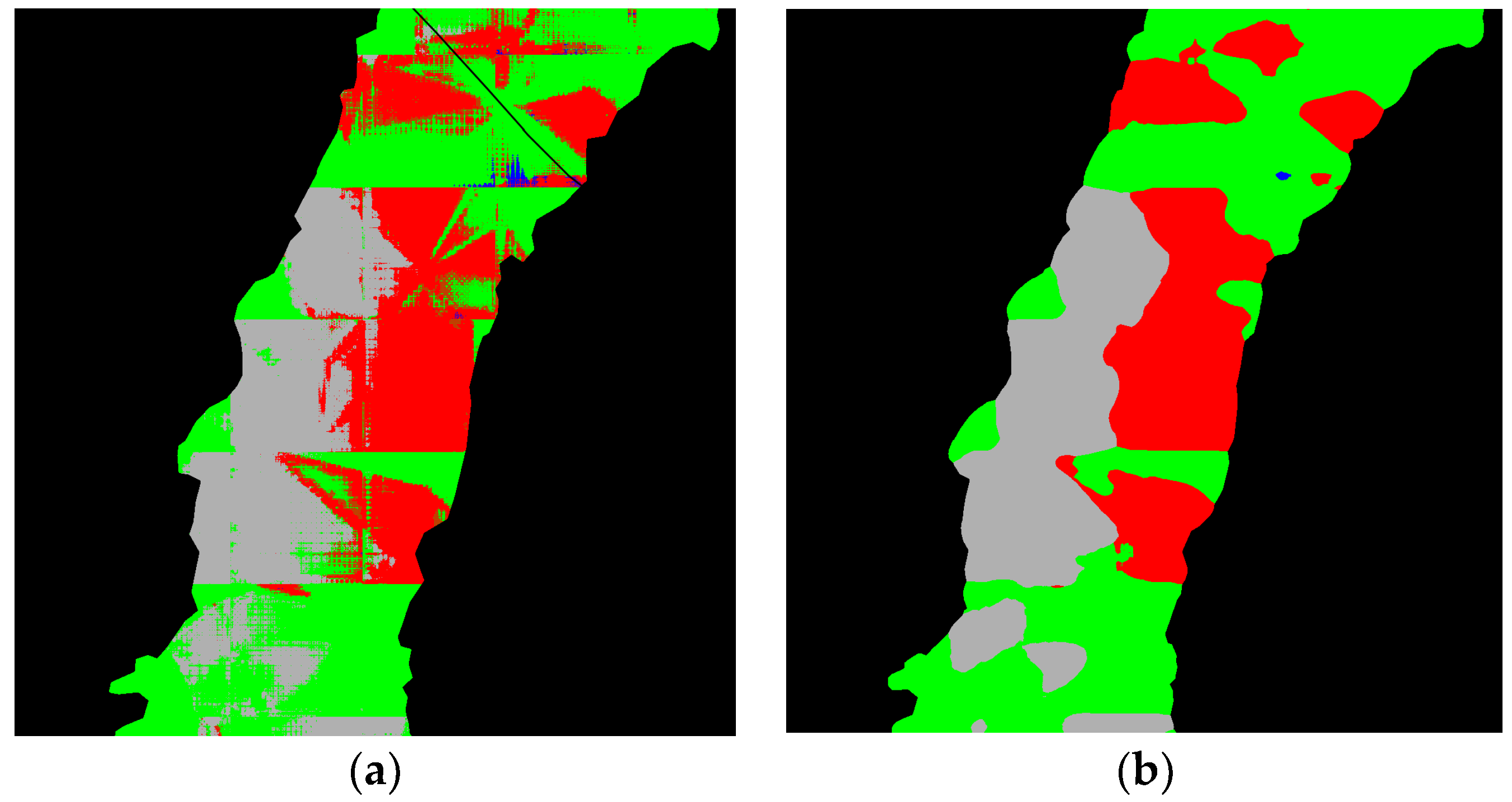
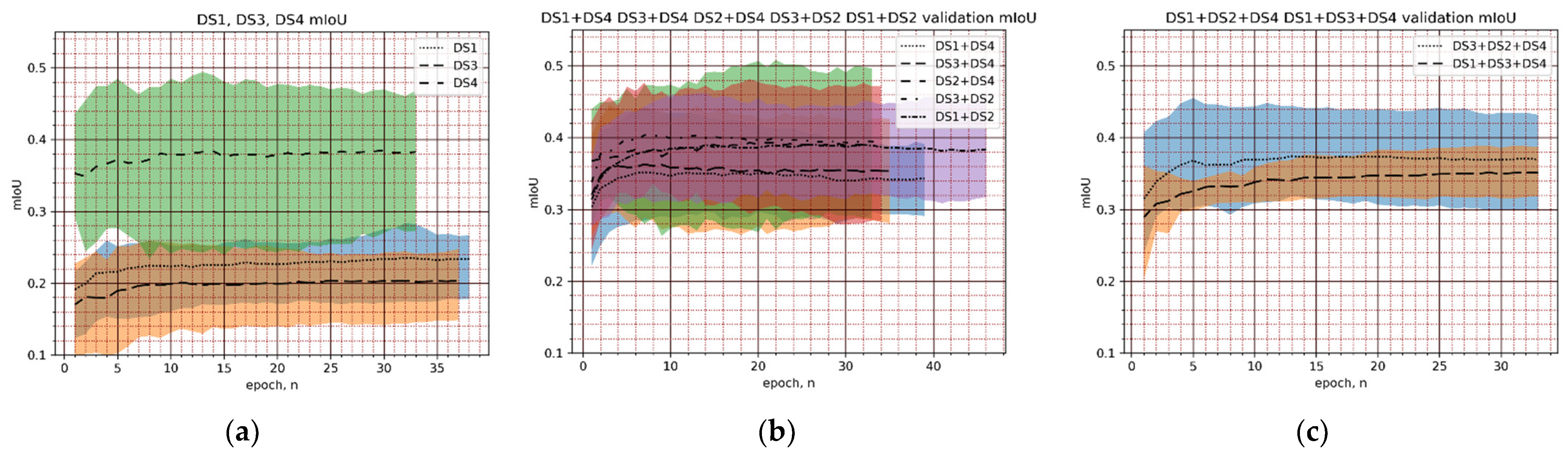
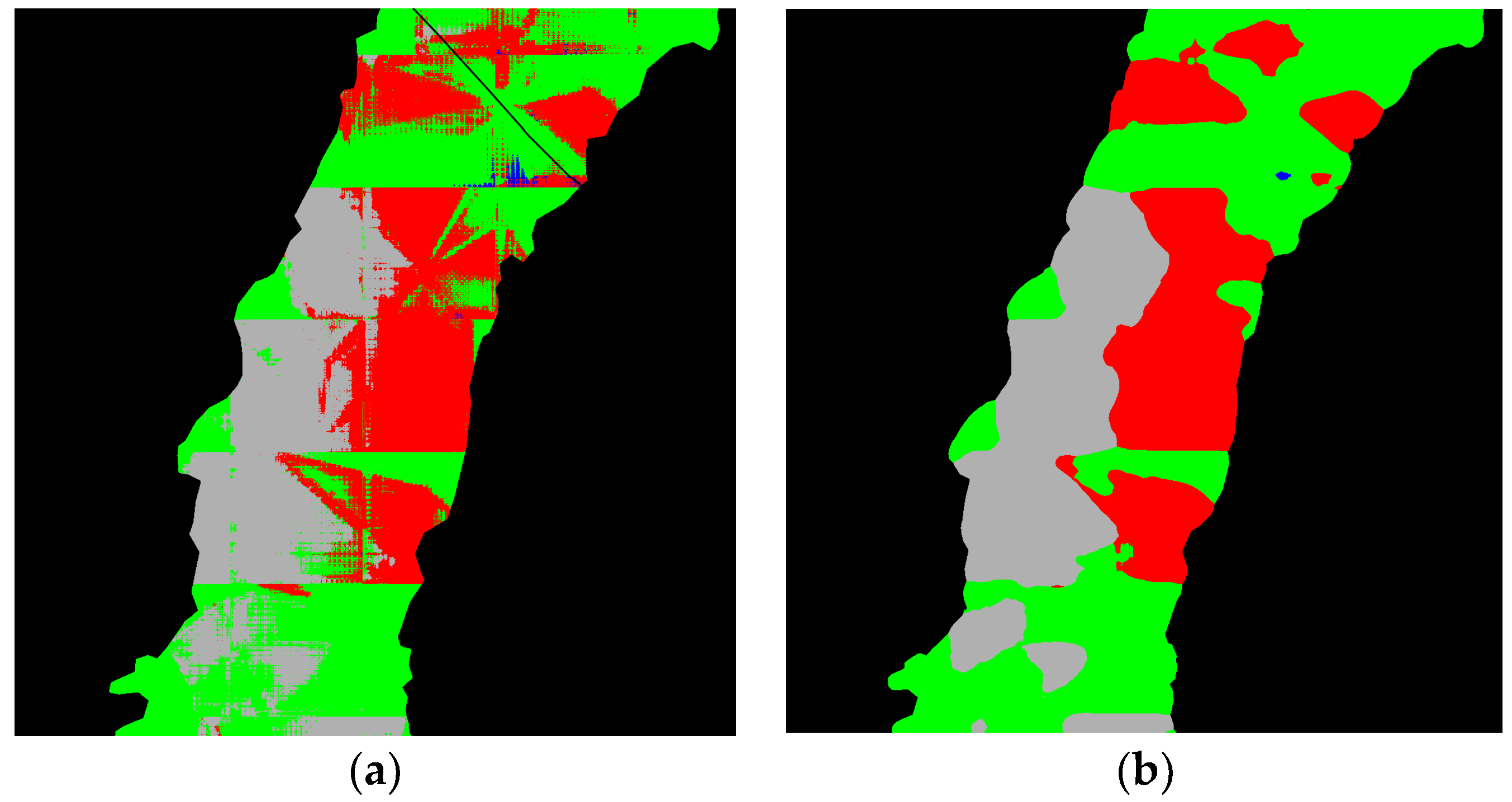
3.4. HMU Segmentation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| River Discharge | Parameter | Analyzed River Stretch | Hydromorphological Unit | |||
| GLIDE | POOL | RIFFLE | RAPID | |||
| Verknė 3.31 m3/s | Area (m2) | 4632.1 | 2236.2 | 548.4 | 1104.2 | 743.2 |
| HMU polygons | 16 | 7 | 4 | 2 | 3 | |
| Širvinta 0.522 m3/s | Area (m2) | 2277.1 | 1288.4 | 695.4 | 216.7 | 76.5 |
| HMU polygons | 21 | 10 | 8 | 2 | 1 | |
| Jūra 1.98 m3/s | Area (m2) | 4851.8 | 2420.8 | 792.9 | 720.0 | 918.2 |
| HMU polygons | 17 | 9 | 2 | 2 | 3 | |
| 7.08 m3/s | Area (m2) | 4848 | 3044.2 | 0.0 | 0.0 | 1803.8 |
| HMU polygons | 11 | 6 | 0 | 0 | 5 | |
| Varduva | ||||||
| Renavas HPP 0.162 m3/s | Area (m2) | 1733.2 | 1208.4 | 487.8 | 37.1 | 0.0 |
| HMU polygons | 17 | 10 | 6 | 1 | 0 | |
| Vadagiai HPP 0.163 m3/s | Area (m2) | 1576.9 | 872.1 | 453.6 | 81.0 | 170.3 |
| HMU polygons | 17 | 10 | 4 | 1 | 2 | |
| 0.967 m3/s | Area (m2) | 1583.8 | 583.7 | 402.1 | 132.9 | 465.2 |
| HMU polygons | 13 | 6 | 3 | 1 | 3 | |
References
- Council directive 2000/60/EC establishing a framework for Community action in the field of water policy. Off. J. 2001, L327, 1–73. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:32000L0060 (accessed on 15 November 2022).
- Cesoniene, L.; Dapkiene, M.; Punys, P. Assessment of the impact of small hydropower plants on the ecological status indicators ofwater bodies: A case study in lithuania. Water 2021, 13, 433. [Google Scholar] [CrossRef]
- Gierszewski, P.J.; Habel, M.; Szmańda, J.; Luc, M. Evaluating effects of dam operation on flow regimes and riverbed adaptation to those changes. Sci. Total Environ. 2020, 710, 136202. [Google Scholar] [CrossRef] [PubMed]
- Kiraga, M. Hydroelectric Power Plants and River Morphodynamic Processes. J. Ecol. Eng. 2021, 22, 163–178. [Google Scholar] [CrossRef]
- Raven, P.J.; Holmes, N.T.H.; Charrier, P.; Dawson, F.H.; Naura, M.; Boon, P.J. Towards a harmonized approach for hydromorphological assessment of rivers in Europe: A qualitative comparison of three survey methods. Aquat. Conserv. Mar. Freshw. Ecosyst. 2002, 12, 405–424. [Google Scholar] [CrossRef]
- Ferreira, J.; Pádua, J.; Hughes, S.J.; Cortes, R.M.; Varandas, S.; Holmes, N.; Raven, P. Adapting and adopting River Habitat Survey: Problems and solutions for fluvial hydromorphological assessment in Portugal. Limnetica 2011, 30, 263–272. [Google Scholar] [CrossRef]
- Jēkabsone, J.; Uzule, L. Assessment of the hydromorphological quality of streams in the Venta River Basin district, Latvia. Est. J. Ecol. 2014, 63, 205–216. [Google Scholar] [CrossRef] [Green Version]
- Jekabsone, J.; Abersons, K.; Kolcova, T.; Tirums, M. First steps in the ecological flow determining for Latvian rivers. Hydrol. Res. 2022, 53, 1063–1074. [Google Scholar] [CrossRef]
- Meir, G.; Zumbroich, T.; Roehrig, J. Hydromorphological assessment as a tool for river basin management: The German field survey method. J. Nat. Resour. Dev. 2013, 3, 14–26. [Google Scholar] [CrossRef] [Green Version]
- El Hourani, M.; Härtling, J.; Broll, G. Hydromorphological Assessment as a Tool for River Basin Management: Problems with the German Field Survey Method at the Transition of Two. Hydrology 2022, 9, 120. [Google Scholar] [CrossRef]
- Wiatkowski, M.; Tomczyk, P. Comparative assessment of the hydromorphological status of the rivers Odra, Bystrzyca, and Ślȩza using the RHS, LAWA, QBR, and HEM methods above and below the hydropower plants. Water 2018, 10, 855. [Google Scholar] [CrossRef]
- Stefanidis, K.; Latsiou, A.; Kouvarda, T.; Lampou, A.; Kalaitzakis, N.; Gritzalis, K.; Dimitriou, E. Disentangling the main components of hydromorphological modifications at reach scale in rivers of Greece. Hydrology 2020, 7, 22. [Google Scholar] [CrossRef] [Green Version]
- Stefanidis, K.; Kouvarda, T.; Latsiou, A.; Papaioannou, G.; Gritzalis, K.; Dimitriou, E. A Comparative Evaluation of Hydromorphological Assessment Methods Applied in Rivers of Greece. Hydrology 2022, 9, 43. [Google Scholar] [CrossRef]
- Belletti, B.; Rinaldi, M.; Buijse, A.D.; Gurnell, A.M.; Mosselman, E. A review of assessment methods for river hydromorphology. Environ. Earth Sci. 2015, 73, 2079–2100. [Google Scholar] [CrossRef]
- Novakova, J.; Melcakova, I.; Svehlakova, H.; Marcakova, L.; Matejova, T.; Klimsa, L. Hydro morphological assessment of the Porubka river. In Proceedings of the 1st International Conference on Advances in Environmental Engineering (AEE 2017), Ostrava, Czech Republic, 28–30 November 2017; Volume 92, p. 012046. [Google Scholar] [CrossRef]
- Bedla, D.; Halecki, W.; Król, K. Hydromorphological method and gis tools with a web application to assess a semi-natural urbanised river. J. Environ. Eng. Landsc. Manag. 2021, 29, 21–32. [Google Scholar] [CrossRef]
- Koutrakis, E.T.; Triantafillidis, S.; Sapounidis, A.S.; Vezza, P.; Kamidis, N.; Sylaios, G.; Comoglio, C. Evaluation of ecological flows in highly regulated rivers using the mesohabitat approach: A case study on the Nestos River, N. Greece. Ecohydrol. Hydrobiol. 2019, 19, 598–609. [Google Scholar] [CrossRef]
- Szoszkiewicz, K.; Jusik, S.; Gebler, D.; Achtenberg, K.; Adynkiewicz-Piragas, M.; Radecki-Pawlik, A.; Okruszko, T.; Giełczewski, M.; Marcinkowski, P.; Pietruczuk, K.; et al. Hydromorphological Index for Rivers (HIR): A New Method for Hydromorphological Assessment and Classification for Flowing Waters in Poland. J. Ecol. Eng. 2020, 21, 261–271. [Google Scholar] [CrossRef]
- Entwistle, N.; Heritage, G.; Milan, D. Recent remote sensing applications for hydro and morphodynamic monitoring and modelling. Earth Surf. Process. Landforms 2018, 43, 2283–2291. [Google Scholar] [CrossRef] [Green Version]
- Beißler, M.R.; Hack, J. A combined field and remote-sensing based methodology to assess the ecosystem service potential of urban rivers in developing countries. Remote Sens. 2019, 11, 1697. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.; Van Dijk, A.I.J.M.; Renzullo, L.J.; Vertessy, R.A.; Mueller, N. Hydromorphological attributes for all Australian river reaches derived from Landsat dynamic inundation remote sensing. Earth Syst. Sci. Data 2019, 11, 1003–1015. [Google Scholar] [CrossRef]
- Knehtl, M.; Petkovska, V.; Urbanič, G. Is it time to eliminate field surveys from hydromorphological assessments of rivers?—Comparison between a field survey and a remote sensing approach. Ecohydrology 2018, 11, e1924. [Google Scholar] [CrossRef] [Green Version]
- Carrivick, J.L.; Smith, M.W. Fluvial and aquatic applications of Structure from Motion photogrammetry and unmanned aerial vehicle/drone technology. Wiley Interdiscip. Rev. Water 2019, 6, e1328. [Google Scholar] [CrossRef] [Green Version]
- Dimitriou, E.; Stavroulaki, E. Assessment of Riverine Morphology and Habitat Regime Using Unmanned Aerial Vehicles in a Mediterranean Environment. Pure Appl. Geophys. 2018, 175, 3247–3261. [Google Scholar] [CrossRef]
- Debell, L.; Anderson, K.; Brazier, R.E.; King, N.; Jones, L. Water resource management at catchment scales using lightweight uavs: Current capabilities and future perspectives. J. Unmanned Veh. Syst. 2015, 4, 7–30. [Google Scholar] [CrossRef]
- Rusnák, M.; Sládek, J.; Kidová, A.; Lehotský, M. Template for high-resolution river landscape mapping using UAV technology. Meas. J. Int. Meas. Confed. 2018, 115, 139–151. [Google Scholar] [CrossRef]
- Woodget, A.S.; Visser, F.; Maddock, I.P.; Carbonneau, P.E. The Accuracy and Reliability of Traditional Surface Flow Type Mapping: Is it Time for a New Method of Characterizing Physical River Habitat? River Res. Appl. 2016, 32, 1902–1914. [Google Scholar] [CrossRef] [Green Version]
- Woodget, A.S.; Austrums, R.; Maddock, I.P.; Habit, E. Drones and digital photogrammetry: From classifications to continuums for monitoring river habitat and hydromorphology. Wiley Interdiscip. Rev. Water 2017, 4, e1222. [Google Scholar] [CrossRef] [Green Version]
- Pontoglio, E.; Dabove, P.; Grasso, N.; Lingua, A.M. Automatic features detection in a fluvial environment through machine learning techniques based on uavs multispectral data. Remote Sens. 2021, 13, 3983. [Google Scholar] [CrossRef]
- Langhammer, J.; Vacková, T. Detection and Mapping of the Geomorphic Effects of Flooding Using UAV Photogrammetry. Pure Appl. Geophys. 2018, 175, 3223–3245. [Google Scholar] [CrossRef]
- Casado, M.; Gonzalez, R.; Kriechbaumer, T.; Veal, A. Automated Identification of River Hydromorphological Features Using UAV High Resolution Aerial Imagery. Sensors 2015, 15, 27969–27989. [Google Scholar] [CrossRef]
- Rivas Casado, M.; González, R.; Ortega, J.; Leinster, P.; Wright, R. Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization. Sensors 2017, 17, 2210. [Google Scholar] [CrossRef] [Green Version]
- Zexing, X.; Chenling, Z.; Qiang, Y.; Xiekang, W.; Xufeng, Y. Hydrodynamics and bed morphological characteristics around a boulder in a gravel stream. Water Sci. Technol. Water Supply 2020, 20, 395–407. [Google Scholar] [CrossRef]
- Papanicolaou, A.N.; Kramer, C.M.; Tsakiris, A.G.; Stoesser, T.; Bomminayuni, S.; Chen, Z. Effects of a fully submerged boulder within a boulder array on the mean and turbulent flow fields: Implications to bedload transport. Acta Geophys. 2012, 60, 1502–1546. [Google Scholar] [CrossRef]
- Fang, H.W.; Liu, Y.; Stoesser, T. Influence of Boulder Concentration on Turbulence and Sediment Transport in Open-Channel Flow Over Submerged Boulders. J. Geophys. Res. Earth Surf. 2017, 122, 2392–2410. [Google Scholar] [CrossRef] [Green Version]
- Dey, S.; Sarkar, S.; Bose, S.K.; Tait, S.; Castro-Orgaz, O. Wall-Wake Flows Downstream of a Sphere Placed on a Plane Rough Wall. J. Hydraul. Eng. 2011, 137, 1173–1189. [Google Scholar] [CrossRef]
- Książek, L.; Woś, A.; Roche, G. Boulder Cluster Influence on Hydraulic Microhabitats Distribution Under Varied Instream Flow Regime. Acta Sci. Pol. Form. Circumiectus 2017, 4, 139–153. [Google Scholar] [CrossRef]
- Timm, R.K.; Caldwell, L.; Nelson, A.; Long, C.; Chilibeck, M.B.; Johnson, M.; Ross, K.; Muller, A.; Brown, J.M. Drones, hydraulics, and climate change: Inferring barriers to steelhead spawning migrations. Wiley Interdiscip. Rev. Water 2019, 6, e1379. [Google Scholar] [CrossRef]
- Ho, L.; Goethals, P. Machine learning applications in river research: Trends, opportunities and challenges. Methods Ecol. Evol. 2022, 13, 2603–2621. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dugdale, S.J.; Breckon, T.P.; Dietrich, J.T.; Fonstad, M.A.; Miyamoto, H.; Woodget, A.S. Adopting deep learning methods for airborne RGB fluvial scene classification. Remote Sens. Environ. 2020, 251, 112107. [Google Scholar] [CrossRef]
- Chabot, D.; Dillon, C.; Shemrock, A.; Weissflog, N.; Sager, E. An Object-Based Image Analysis Workflow for Monitoring Shallow-Water Aquatic Vegetation in Multispectral Drone Imagery. ISPRS Int. J. Geo-Inf. 2018, 7, 294. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. SMART-SDB: Sample-specific multiple band ratio technique for satellite-derived bathymetry. Remote Sens. Environ. 2020, 251, 112091. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Harrison, L.R. Remote Sensing of River Bathymetry: Evaluating a Range of Sensors, Platforms, and Algorithms on the Upper Sacramento River, California, USA. Water Resour. Res. 2019, 55, 2142–2169. [Google Scholar] [CrossRef]
- Rathinam, S.; Almeida, P.; Kim, Z.; Jackson, S.; Tinka, A.; Grossman, W.; Sengupta, R. Autonomous Searching and Tracking of a River using an UAV. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 359–364. [Google Scholar]
- Demarchi, L.; Bizzi, S.; Piégay, H. Hierarchical Object-Based Mapping of Riverscape Units and in-Stream Mesohabitats Using LiDAR and VHR Imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Rabanaque, M.P.; Martínez-Fernández, V.; Calle, M.; Benito, G. Basin-wide hydromorphological analysis of ephemeral streams using machine learning algorithms. Earth Surf. Process. Landf. 2022, 47, 328–344. [Google Scholar] [CrossRef]
- Kilpys, J. Sniego Dangos Rodiklių Tyrimas Nuotoliniais Metodais Lyguminėse Teritorijose; Vilnius University: Vilnius, Lithuania, 2021. [Google Scholar]
- Stonevicius, E.; Uselis, G.; Grendaite, D. Ice Detection with Sentinel-1 SAR Backscatter Threshold in Long Sections of Temperate Climate Rivers. Remote Sens. 2022, 14, 1627. [Google Scholar] [CrossRef]
- Grendaitė, D.; Stonevičius, E. Machine Learning Algorithms for Biophysical Classification of Lithuanian Lakes Based on Remote Sensing Data. Water 2022, 14, 1732. [Google Scholar] [CrossRef]
- Gailiušis, B.; Jablonskis, J.; Kovalenkovienė, M. The Lithuanian rivers. Hydrography and runoff; Lithuanian Energy Institute: Kaunas, Lithuania, 2001; p. 796. (In Lithuanian) [Google Scholar]
- Rinaldi, M.; Gurnell, A.M.; Belletti, B.; Berga Cano, M.I.; Bizzi, S.; Bussettini, M.; del Tánago, M.; Grabowski, R.; Habersack, H.; Klösch, M.; et al. Final report on methods, models, tools to assess the hydromorphology of rivers. In Proceedings of the International Conference on River and Stream Restoration “Novel Approaches to Assess and Rehabilitate Modified Rivers”, Wageningen, The Netherlands, 30 June–2 July 2015. [Google Scholar]
- Belletti, B.; Rinaldi, M.; Bussettini, M.; Comiti, F.; Gurnell, A.M.; Mao, L.; Nardi, L.; Vezza, P. Characterising physical habitats and fluvial hydromorphology: A new system for the survey and classification of river geomorphic units. Geomorphology 2017, 283, 143–157. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.-C. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the Proceedings of the IEEE Conference on Computer Vision and pattern Recognition; Salt Lake City, UT, USA, 18–23 June 2018, pp. 4510–4520.
- Chen, L.; Li, S.; Bai, Q.; Yang, J.; Jiang, S.; Miao, Y. Review of Image Classification Algorithms Based on Convolutional Neural Networks. Remote Sens. 2021, 13, 4712. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szymak, P.; Piskur, P.; Naus, K. The effectiveness of using a pretrained deep learning neural networks for object classification in underwater video. Remote Sens. 2020, 12, 3020. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Roberts, D.A.; Marcus, W.A.; Fonstad, M.A. Passive optical remote sensing of river channel morphology and in-stream habitat: Physical basis and feasibility. Remote Sens. Environ. 2004, 93, 493–510. [Google Scholar] [CrossRef] [Green Version]
- Wright, A.; Marcus, W.A.; Aspinall, R. Evaluation of multispectral, fine scale digital imagery as a tool for mapping stream morphology. Geomorphology 2000, 33, 107–120. [Google Scholar] [CrossRef]
- Güttler, F.N.; Niculescu, S.; Gohin, F. Turbidity retrieval and monitoring of Danube Delta waters using multi-sensor optical remote sensing data: An integrated view from the delta plain lakes to the western–northwestern Black Sea coastal zone. Remote Sens. Environ. 2013, 132, 86–101. [Google Scholar] [CrossRef] [Green Version]
- Constantin, S.; Constantinescu, Ș.; Doxaran, D. Long-term analysis of turbidity patterns in Danube Delta coastal area based on MODIS satellite data. J. Mar. Syst. 2017, 170, 10–21. [Google Scholar] [CrossRef]

| Scenario No. | Aerial Imagery Data | Direct Measurements Data | Label |
|---|---|---|---|
| 1 | - | DS4 | depth-vel |
| 2 | DS3 | - | photo-only (Sobel filter is ON) |
| 3 | DS1 | - | photo-only |
| 4 | DS1 | DS4 | depth-vel-photo |
| 5 | DS3 | DS4 | depth-vel-photo (Sobel filter is ON) |
| 6 | DS2 | DS4 | depth-vel-boulder |
| 7 | DS3 + DS2 | - | photo-only-boulder (Sobel filter is ON) |
| 8 | DS1 + DS2 | - | photo-only-boulder |
| 9 | DS3 + DS2 | DS4 | depth-vel-photo-boulder (Sobel filter is ON) |
| 10 | DS1 + DS2 | DS4 | depth-vel-photo-boulder |
| River Discharge | Parameter | Hydromorphological Unit | |||
|---|---|---|---|---|---|
| GLIDE | POOL | RIFFLE | RAPID | ||
| Verknė 3.31 m3/s | Depth (m) | 0.62 | 1.05 | 0.50 | 0.54 |
| Velocity (m/s) | 0.422 | 0.260 | 0.609 | 0.757 | |
| Širvinta 0.522 m3/s | Depth (m) | 0.38 | 0.73 | 0.25 | 0.35 |
| Velocity (m/s) | 0.216 | 0.132 | 0.405 | 0.362 | |
| Jūra 1.98 m3/s | Depth (m) | 0.54 | 0.85 | 0.35 | 0.44 |
| Velocity (m/s) | 0.210 | 0.206 | 0.630 | 0.579 | |
| 7.08 m3/s | Depth (m) | 0.94 | - | - | 0.77 |
| Velocity (m/s) | 0.540 | - | - | 0.873 | |
| Varduva | |||||
| Renavas HPP 0.162 m3/s | Depth (m) | 0.32 | 0.65 | 0.24 | - |
| Velocity (m/s) | 0.144 | 0.078 | 0.385 | - | |
| Vadagiai HPP 0.163 m3/s | Depth (m) | 0.29 | 0.68 | 0.17 | 0.21 |
| Velocity (m/s) | 0.140 | 0.055 | 0.483 | 0.478 | |
| 0.967 m3/s | Depth (m) | 0.48 | 0.80 | 0.30 | 0.40 |
| Velocity (m/s) | 0.235 | 0.141 | 0.540 | 0.577 | |
| Fold | Total Area (m2) | HMU by Type Area (Number of HMU Polygons) | Number of Boulders | ||||
|---|---|---|---|---|---|---|---|
| GLIDE | POOL | RIFFLE | RAPID | Under Water | Above Water | ||
| 1 | 4117.1 (38) | 2790.8 (22) | 491.1 (7) | 441.5 (3) | 393.7 (6) | 175 | 102 |
| 2 | 4279.3 (38) | 2080.4 (20) | 555.0 (9) | 522.2 (3) | 1121.6 (6) | 531 | 457 |
| 3 | 4233.9 (23) | 2298.8 (15) | 439.5 (4) | 495.2 (1) | 1000.4 (3) | 169 | 99 |
| 4 | 4621.6 (32) | 3189.4 (16) | 531.9 (9) | 0.0 (0) | 900.3 (7) | 204 | 239 |
| 5 | 4244.4 (23) | 1291.2 (8) | 1361.3 (9) | 832.9 (2) | 759.1 (4) | 389 | 200 |
| Fold | Class | Objects | Precision | Recall | mAP-50 |
|---|---|---|---|---|---|
| Train 2345-valid1 | BAW | 809 | 0.851 | 0.710 | 0.731 |
| BUW | 1025 | 0.666 | 0.443 | 0.454 | |
| Train 1345-valid2 | BAW | 2453 | 0.766 | 0.797 | 0.805 |
| BUW | 3091 | 0.578 | 0.339 | 0.361 | |
| Train 1245-valid3 | BAW | 664 | 0.798 | 0.664 | 0.719 |
| BUW | 823 | 0.567 | 0.408 | 0.434 | |
| Train 1235-valid4 | BAW | 1670 | 0.669 | 0.764 | 0.773 |
| BUW | 924 | 0.620 | 0.360 | 0.393 | |
| Train 1234-valid5 | BAW | 1673 | 0.798 | 0.515 | 0.579 |
| BUW | 2485 | 0.734 | 0.404 | 0.462 |
| Scenario No. | Data Sources | mIoU of Model Output | mIoU of Post Processed Model Output |
|---|---|---|---|
| 1. | DS4 | 0.394 | 0.409 |
| 2. | DS3 | 0.243 | 0.254 |
| 3. | DS1 | 0.262 | 0.271 |
| 4. | DS1 + DS4 | 0.348 | 0.360 |
| 5. | DS3 + DS4 | 0.357 | 0.374 |
| 6. | DS2 + DS4 | 0.397 | 0.416 |
| 7. | DS3 + DS2 | 0.405 | 0.421 |
| 8. | DS1 + DS2 | 0.383 | 0.395 |
| 9. | DS3 + DS2 + DS4 | 0.382 | 0.405 |
| 10. | DS1 + DS2 + DS4 | 0.362 | 0.385 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akstinas, V.; Kriščiūnas, A.; Šidlauskas, A.; Čalnerytė, D.; Meilutytė-Lukauskienė, D.; Jakimavičius, D.; Fyleris, T.; Nazarenko, S.; Barauskas, R. Determination of River Hydromorphological Features in Low-Land Rivers from Aerial Imagery and Direct Measurements Using Machine Learning Algorithms. Water 2022, 14, 4114. https://doi.org/10.3390/w14244114
Akstinas V, Kriščiūnas A, Šidlauskas A, Čalnerytė D, Meilutytė-Lukauskienė D, Jakimavičius D, Fyleris T, Nazarenko S, Barauskas R. Determination of River Hydromorphological Features in Low-Land Rivers from Aerial Imagery and Direct Measurements Using Machine Learning Algorithms. Water. 2022; 14(24):4114. https://doi.org/10.3390/w14244114
Chicago/Turabian StyleAkstinas, Vytautas, Andrius Kriščiūnas, Arminas Šidlauskas, Dalia Čalnerytė, Diana Meilutytė-Lukauskienė, Darius Jakimavičius, Tautvydas Fyleris, Serhii Nazarenko, and Rimantas Barauskas. 2022. "Determination of River Hydromorphological Features in Low-Land Rivers from Aerial Imagery and Direct Measurements Using Machine Learning Algorithms" Water 14, no. 24: 4114. https://doi.org/10.3390/w14244114
APA StyleAkstinas, V., Kriščiūnas, A., Šidlauskas, A., Čalnerytė, D., Meilutytė-Lukauskienė, D., Jakimavičius, D., Fyleris, T., Nazarenko, S., & Barauskas, R. (2022). Determination of River Hydromorphological Features in Low-Land Rivers from Aerial Imagery and Direct Measurements Using Machine Learning Algorithms. Water, 14(24), 4114. https://doi.org/10.3390/w14244114