

Potential of Two SAR-Based Flood Mapping Approaches in Supporting an Integrated 1D/2D HEC-RAS Model



Abstract
1. Introduction
2. Materials and Methods
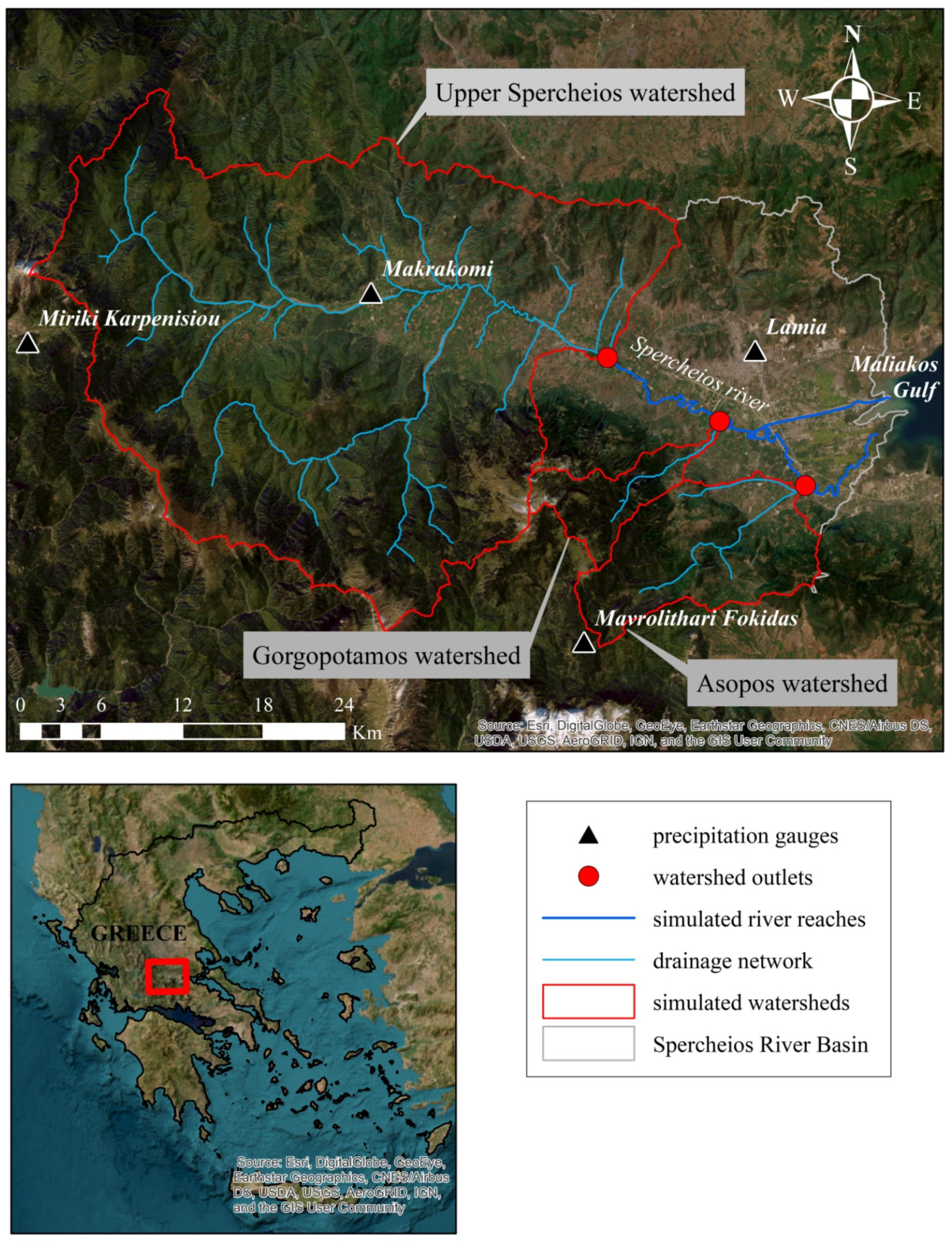
2.1. Study Area
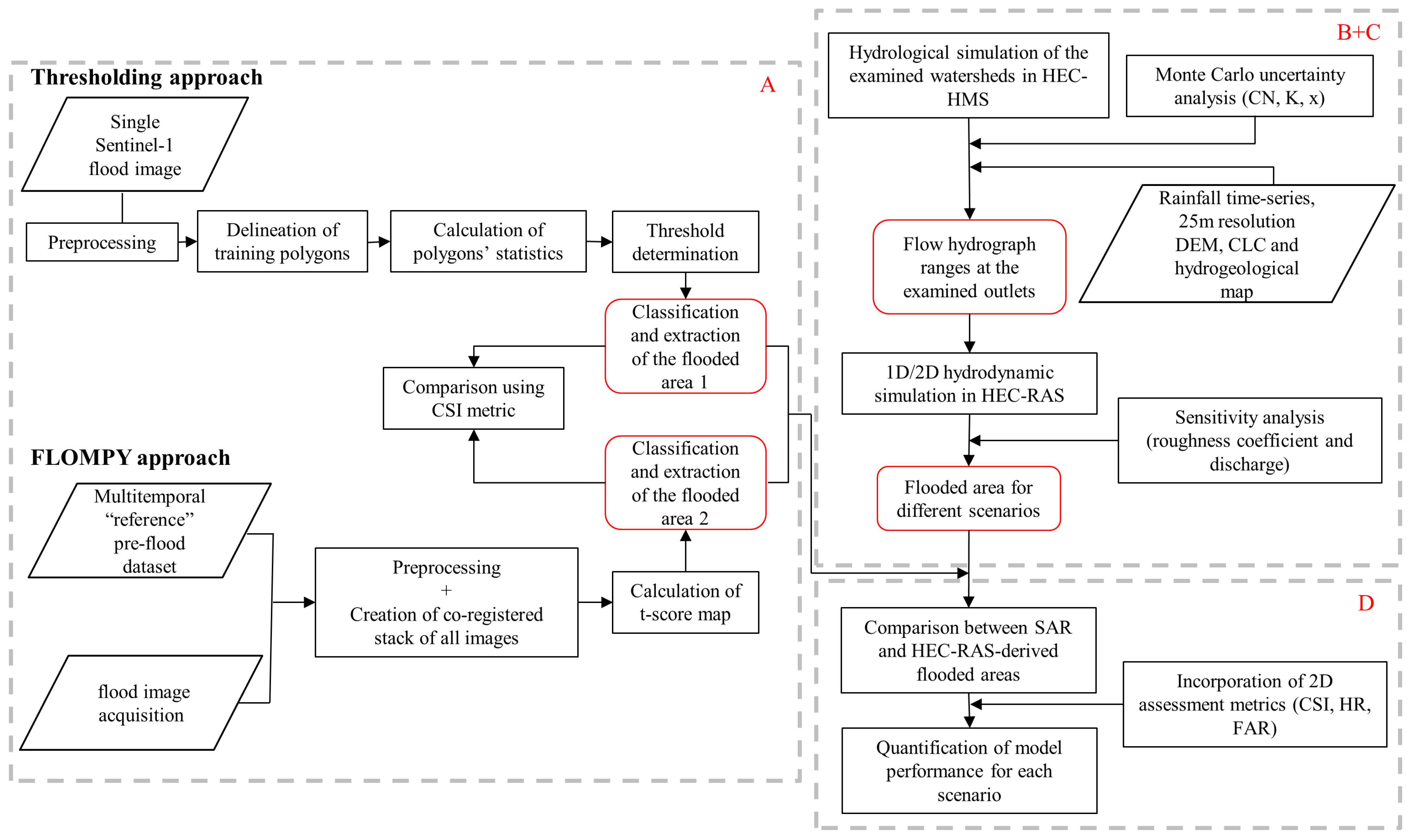
2.2. Methodology
2.2.1. Inundation Boundary Extraction through SAR Image Processing
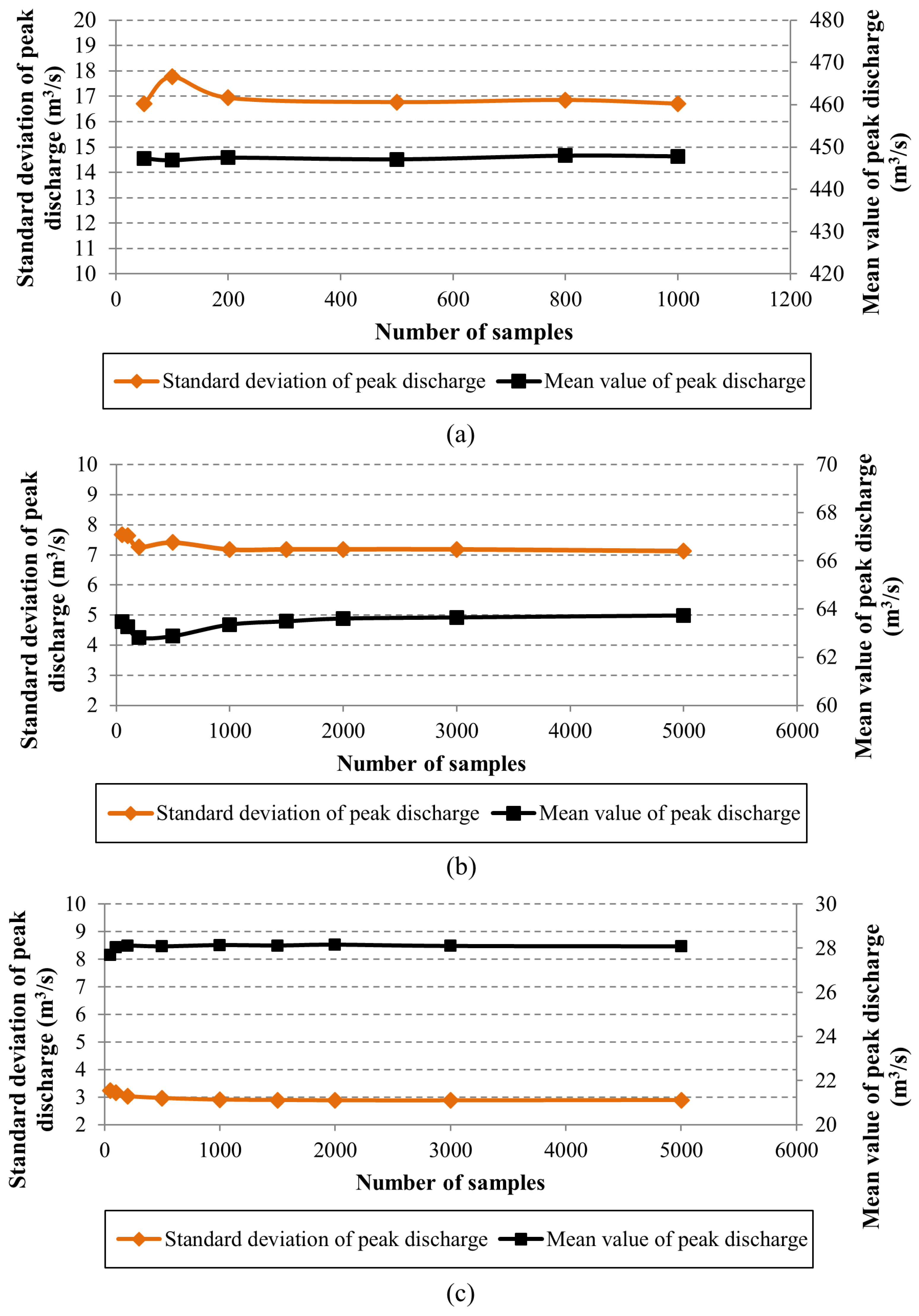
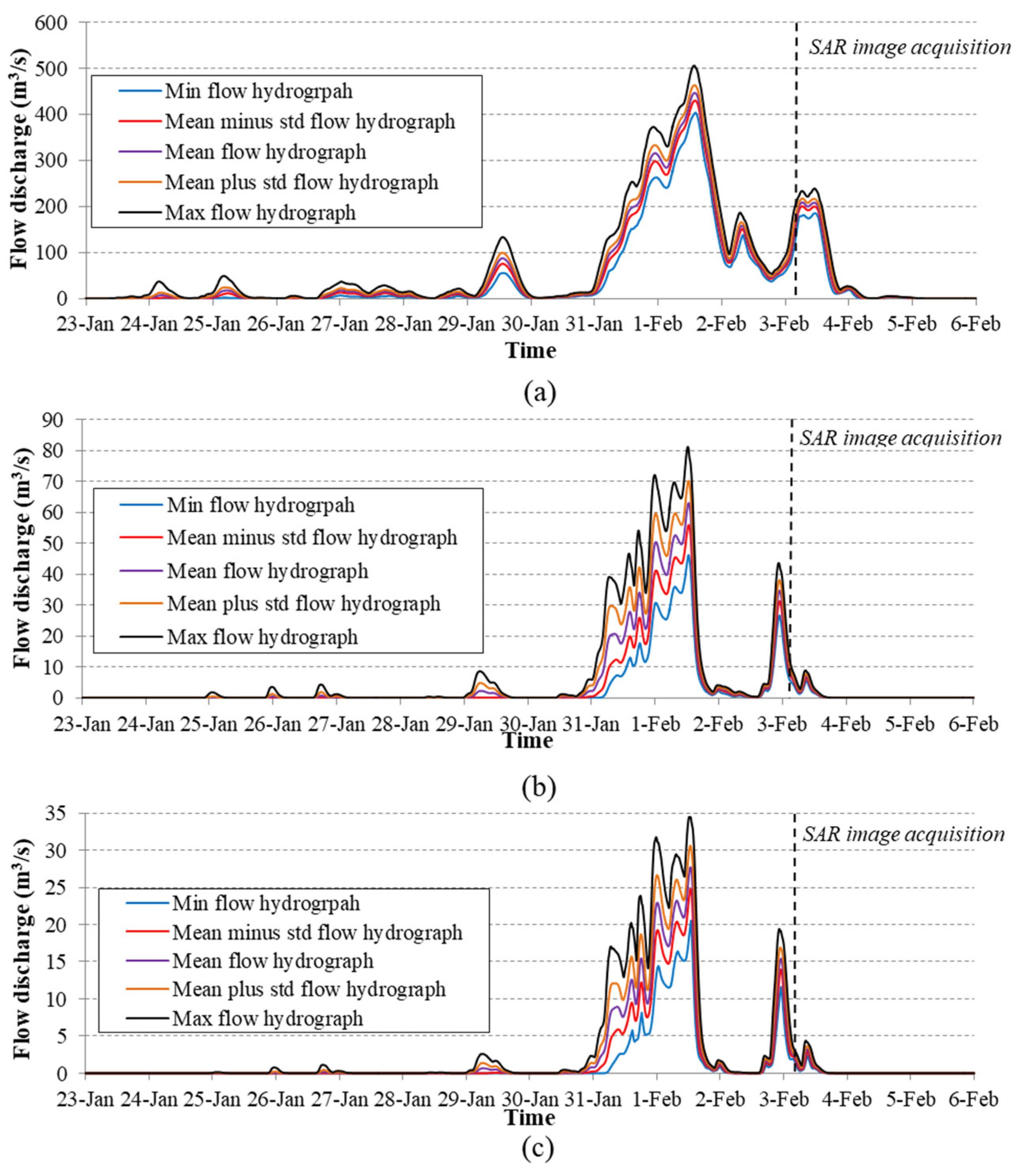
2.2.2. Hydrologic Simulation in HEC-HMS Software
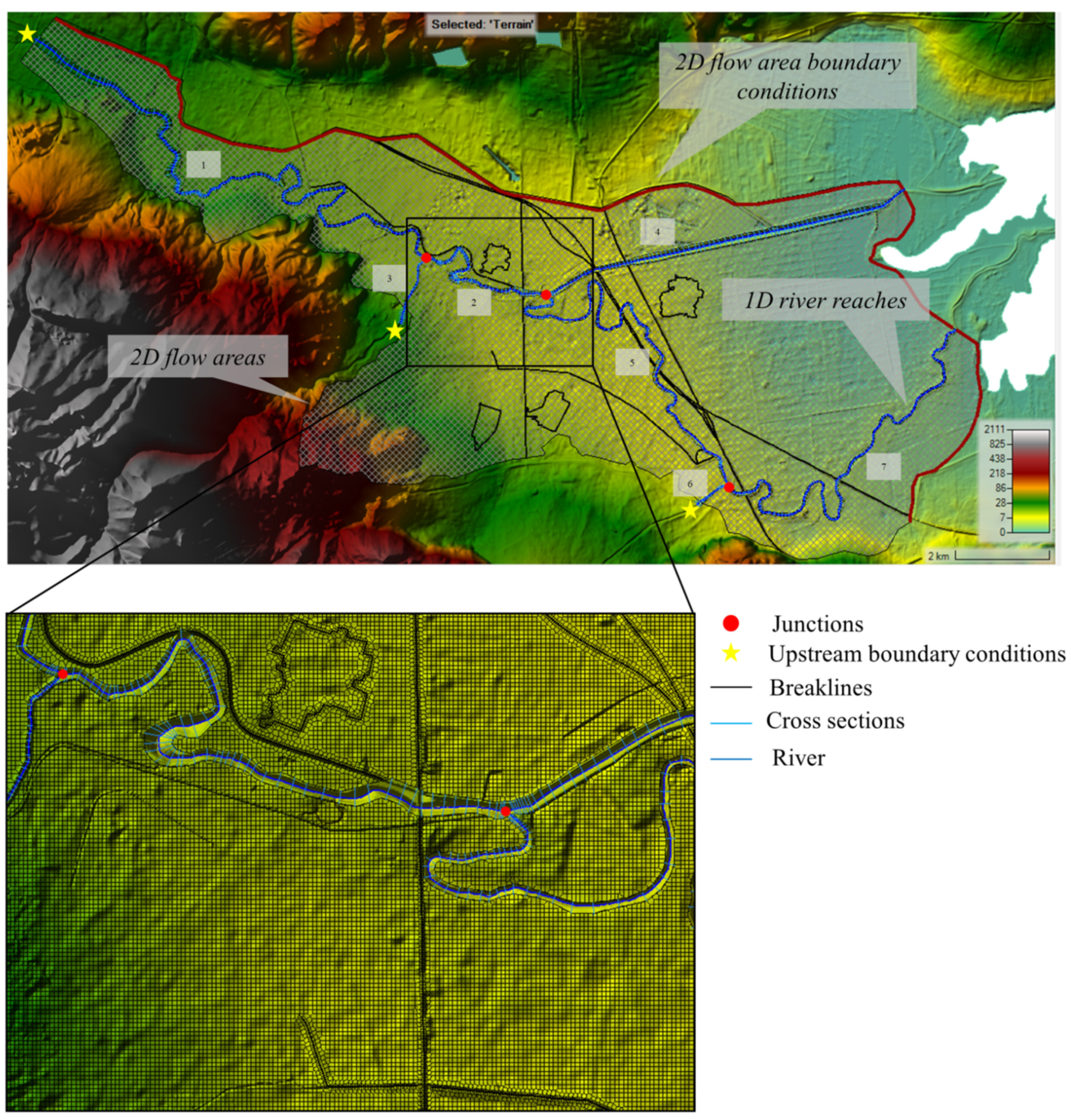
2.2.3. Hydrodynamic Simulation in HEC-RAS Software
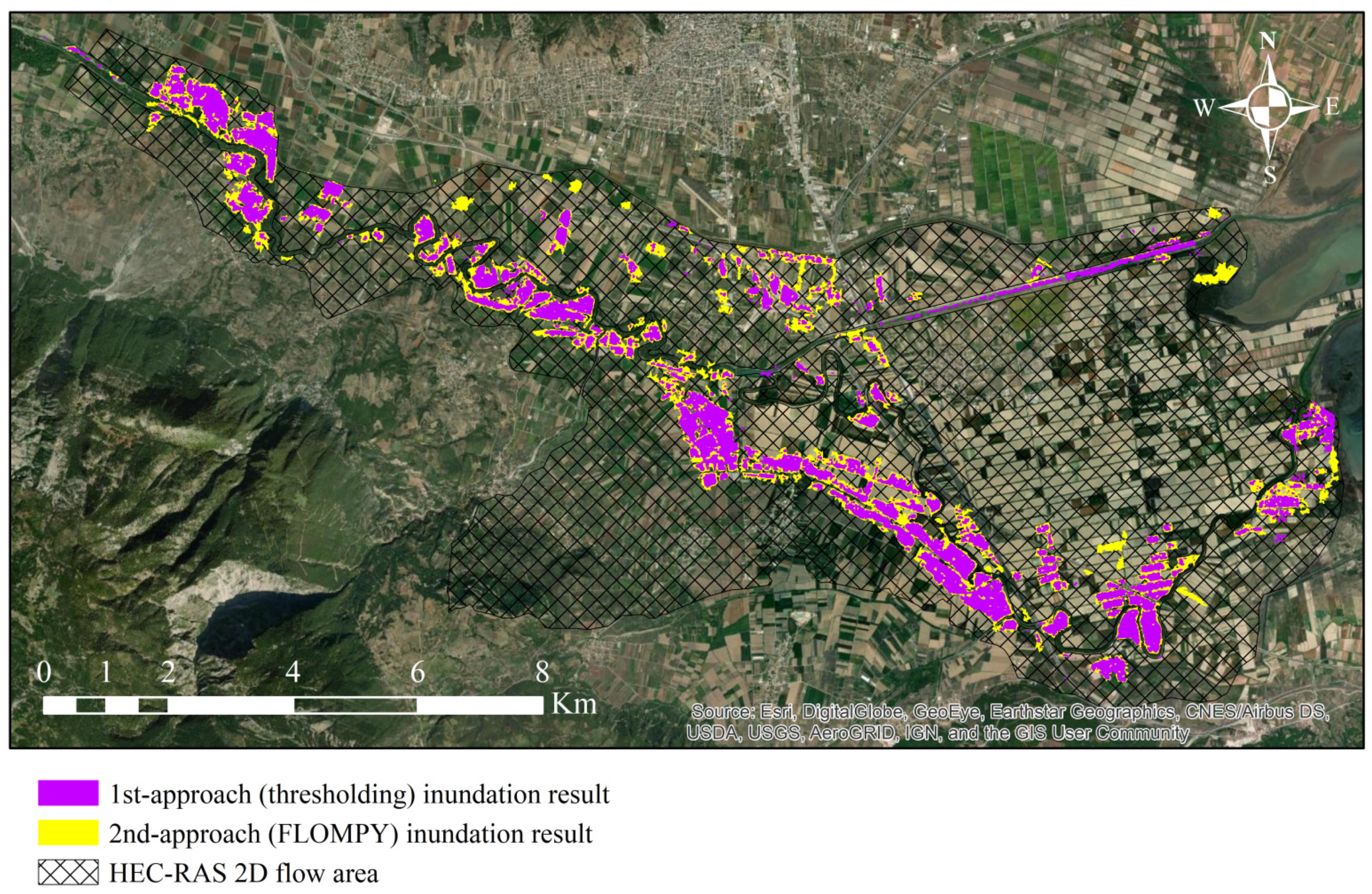
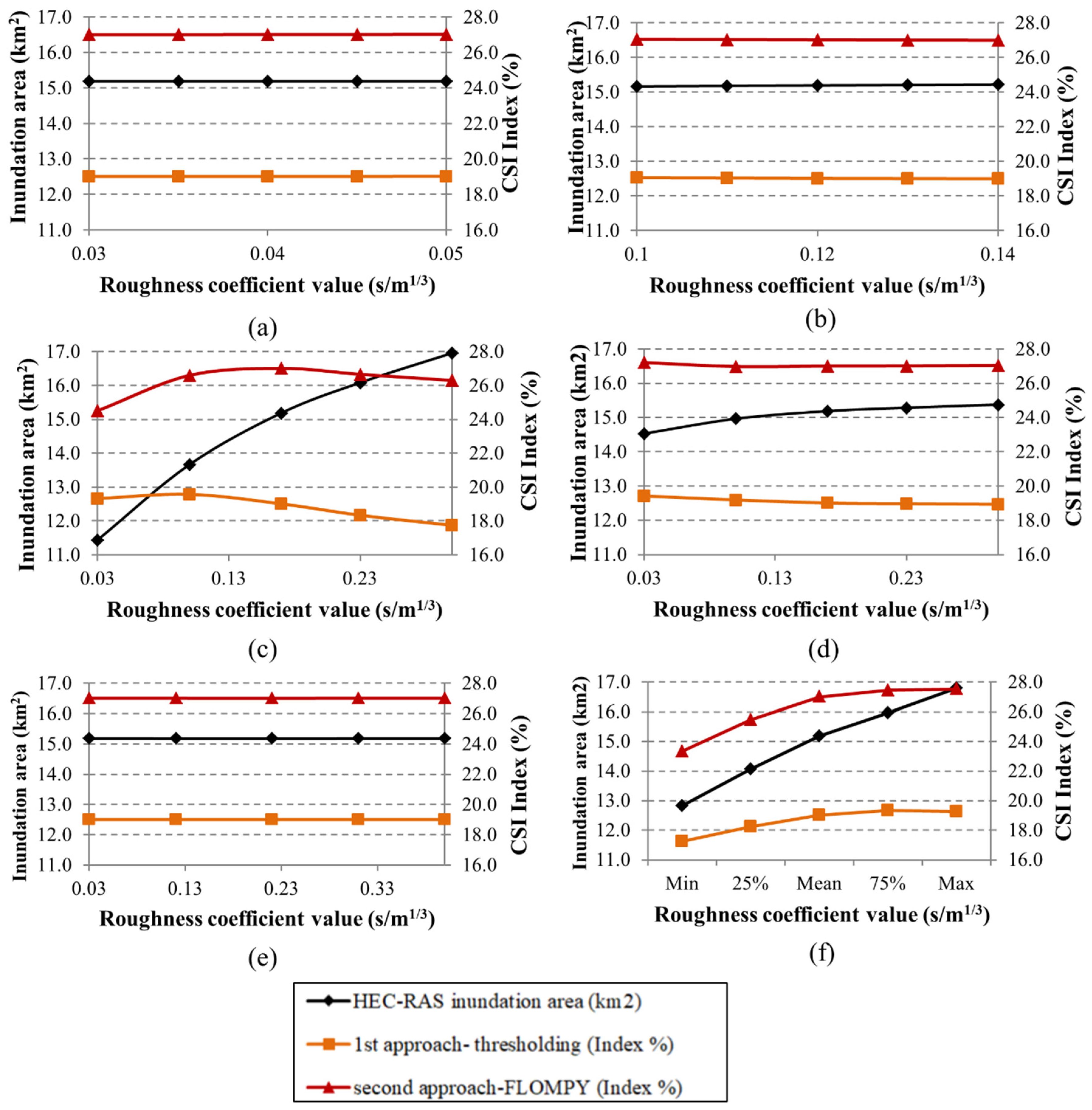
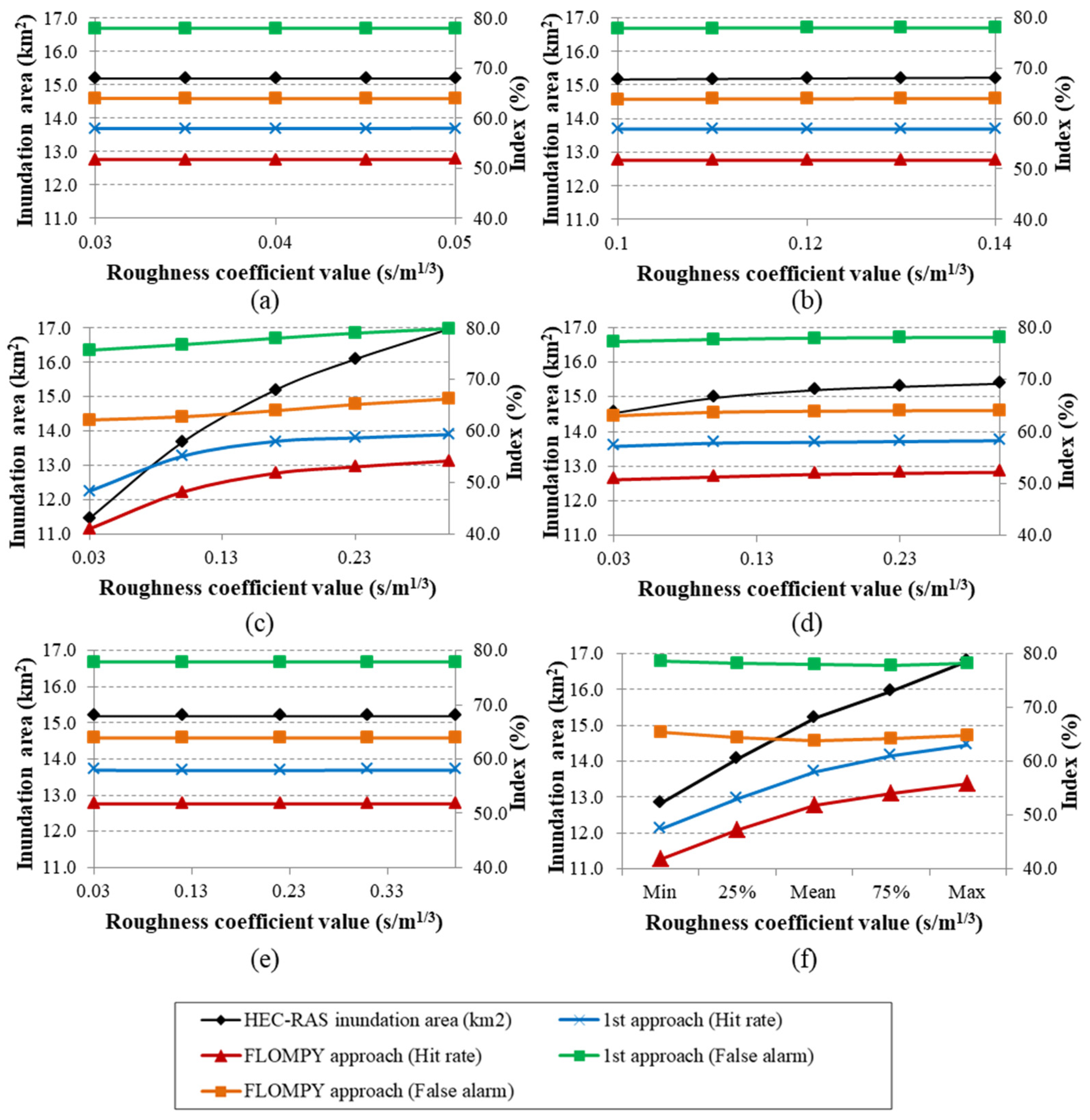
2.2.4. Comparison–Evaluation
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yannopoulos, S.; Eleftheriadou, E.; Mpouri, S.; Giannopoulou, I. Implementing the Requirements of the European Flood Directive: The Case of Ungauged and Poorly Gauged Watersheds. Environ. Process. 2015, 2, 191–207. [Google Scholar] [CrossRef]
- Schlaffer, S.; Chini, M.; Giustarini, L.; Matgen, P. Probabilistic mapping of flood-induced backscatter changes in SAR time series. Int. J. Appl. Earth Obs. Geoinf. 2017, 56, 77–87. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Goldberg, M.D.; Sjoberg, B.; Santek, D.; Hoffman, J.P.; DeWeese, M.; Restrepo, P.; Lindsey, S.; Holloway, E. Automatic near real-time flood detection using Suomi-NPP/VIIRS data. Remote Sens. Environ. 2018, 204, 672–689. [Google Scholar] [CrossRef]
- Singh, A.; Sarma, A.K.; Hack, J. Cost-Effective Optimization of Nature-Based Solutions for Reducing Urban Floods Considering Limited Space Availability. Environ. Process. 2020, 7, 297–319. [Google Scholar] [CrossRef]
- Li, Y.; DeLiberty, T. Assessment of Urban Streamflow in Historical Wet and Dry Years Using SWAT across Northwestern Delaware. Environ. Process. 2020, 7, 597–614. [Google Scholar] [CrossRef]
- Budamala, V.; Baburao Mahindrakar, A. Integration of Adaptive Emulators and Sensitivity Analysis for Enhancement of Complex Hydrological Models. Environ. Process. 2020, 7, 1235–1253. [Google Scholar] [CrossRef]
- El Harraki, W.; Ouazar, D.; Bouziane, A.; El Harraki, I.; Hasnaoui, D. Streamflow Prediction Upstream of a Dam Using SWAT and As-sessment of the Impact of Land Use Spatial Resolution on Model Performance. Environ. Process. 2021, 8, 1165–1186. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized Difference Flood Index for rapid flood mapping: Taking advantage of EO big data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- Pistrika, A.; Tsakiris, G.; Nalbantis, I. Flood Depth-Damage Functions for Built Environment. Environ. Process. 2014, 1, 553–572. [Google Scholar] [CrossRef]
- Zotou, I.; Bellos, V.; Gkouma, A.; Karathanassi, V.; Tsihrintzis, V.A. Using Sentinel-1 imagery to assess predictive performance of a hydraulic model. Water Resour. Manag. 2020, 34, 4415–4430. [Google Scholar] [CrossRef]
- Zhang, B.; Wdowinski, S.; Oliver-Cabrera, T.; Koirala, R.; Jo, M.; Osmanoglu, B. Mapping the extent and magnitude of severe flooding induced by hurricane IRMA with multi-temporal SENTINEL-1 SAR and Insar observations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 2237–2244. [Google Scholar] [CrossRef]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.P. A method for automatic and rapid mapping of water surfaces from sentinel-1 imagery. Remote Sens. 2018, 10, 217. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from Synthetic Aperture Radar (SAR) data using fuzzy logic. Nat. Hazards Earth Syst. Sci. 2011, 11, 529–540. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR data for detecting floodwater in urban and agricultural areas: The role of the interferometric coherence. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1532–1544. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Schumann, G.; Bates, P.D. A technique for the calibration of hydraulic models using uncertain satellite observations of flood extent. J. Hydrol. 2009, 367, 276–282. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, RG2002. [Google Scholar] [CrossRef]
- Patro, S.; Chatterjee, C.; Singh, R.; Raghuwanshi, N. Hydrodynamic modeling of a large flood-prone river system in India with limited data. Hydrol. Process. 2009, 23, 2774–2791. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Schumann, G.; Brandimarte, L.; Bates, P.D. Timely low resolution SAR Imagery to support floodplain modeling: A case study review. Surv. Geophys. 2011, 32, 255–269. [Google Scholar] [CrossRef]
- Jung, H.C.; Alsdorf, D.; Moritz, M.; Lee, H.; Vassolo, S. Analysis of the relationship between flooding area and water height in the Logone floodplain. Phys. Chem. Earth Parts A/B/C 2011, 36, 232–240. [Google Scholar] [CrossRef]
- Yan, K.; Di Baldassarre, G.; Solomatine, D. Exploring the potential of SRTM topographic data for flood inundation modelling under uncertainty. J. Hydroinform. 2013, 15, 849–861. [Google Scholar] [CrossRef]
- Scarpino, S.; Albano, R.; Cantisani, A.; Mancusi, L.; Sole, A.; Milillo, G. Multitemporal SAR data and 2D hydrodynamic model flood scenario dynamics assessment. ISPRS Int. J. Geo-Inf. 2018, 7, 105. [Google Scholar] [CrossRef]
- Jacob, X.K.; Bisht, D.S.; Chatterjee, C.; Raghuwanshi, N.S. Hydrodynamic modeling for flood hazard assessment in a data scarce region: A case study of Bharathapuzha river basin. Environ. Model. Assess. 2020, 25, 97–114. [Google Scholar] [CrossRef]
- Logah, F.Y.; Adjei, K.A.; Obuobie, E.; Gyamfi, C.; Odai, S.N. Evaluation and Comparison of Satellite Rainfall Products in the Black Volta Basin. Environ. Process. 2021, 8, 119–137. [Google Scholar] [CrossRef]
- Darko, S.; Adjei, K.A.; Gyamfi, C.; Odai, S.N.; Osei-Wusuansa, H. Evaluation of RFE Satellite Precipitation and its Use in Streamflow Simulation in Poorly Gauged Basins. Environ. Process. 2021, 8, 691–712. [Google Scholar] [CrossRef]
- Akter, T.; Gazi, M.Y.; Mia, M.B. Assessment of Land Cover Dynamics, Land Surface Temperature, and Heat Island Growth in Northwestern Bangladesh Using Satellite Imagery. Environ. Process. 2021, 8, 661–690. [Google Scholar] [CrossRef]
- Wang, Y.; Colby, J.D.; Mulcahy, K.A. An efficient method for mapping flood extent in a coastal floodplain using Landsat TM and DEM data. Int. J. Remote Sens. 2002, 23, 3681–3696. [Google Scholar] [CrossRef]
- Brakenridge, R.; Carlos, H.; Anderson, E.K. River gaging reaches: A strategy for MODIS-based river monitoring. Remote Sens. Environ. Monit. GIS Appl. Geol. II 2003, 4886, 479–486. [Google Scholar]
- Brakenridge, R.; Anderson, E.K.; Nghiem, S.; Caquard, S.; Shabaneh, T.B. Flood warnings, flood disaster assessments, and flood hazard reduction: The roles of orbital remote sensing. In Proceedings of the 30th International Symposium of Remote Sensing and Environment 2003, Honolulu, HI, USA, 10–14 November 2003. [Google Scholar]
- Sandholt, I.; Nyborg, L.; Fog, B.; Lô, M.; Boucum, O.; Rasmussen, K. Remote sensing techniques for flood monitoring in the Senegal River Valley. Dan. J. Geogr. 2003, 103, 71–81. [Google Scholar] [CrossRef]
- Stancalie, G.; Diamandi, A.; Corbus, C.; Catana, S. Application of EO data in flood fore-casting for the Crisuri Basin, Romania. In Flood Risk Management: Hazards, Vulnerability and Mitigation Measures; Springer: Dordrecht, The Netherlands, 2006; pp. 101–113. [Google Scholar]
- Wang, Y. Using Landsat 7 TM data acquired days after a flood event to delineate the maximum flood extent on a coastal floodplain. Int. J. Remote Sens. 2004, 25, 959–974. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. Monitoring flood evolution in vegetated areas using COSMO-SkyMed data: The Tuscany 2009 case study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1807–1816. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P.A. Hierarchical split-based approach for parametric thresholding of SAR images: Flood inundation as a test case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Grimaldi, S.; Xu, J.; Li, Y.; Pauwels, V.R.; Walker, J.P. Flood mapping under vegetation using single SAR acquisitions. Remote Sens. Environ. 2020, 237, 111582. [Google Scholar] [CrossRef]
- Horritt, M.S. Calibration of a two-dimensional finite element flood flow model using satellite radar imagery. Water Resour. Res. 2000, 36, 3279–3291. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Horritt, M.S.; Di Baldassarre, G.; Bates, P.D.; Brath, A. Comparing the performance of a 2-D finite element and a 2-D finite volume model of floodplain inundation using airborne SAR imagery. Hydrol. Process. 2007, 21, 2745–2759. [Google Scholar] [CrossRef]
- Schumann, G.J.P.; Hostache, R.; Puech, C.; Hoffmann, L.; Matgen, P.; Pappenberger, F.; Pfister, L. High-resolution 3-D flood information from radar imagery for flood hazard management. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1715–1725. [Google Scholar] [CrossRef]
- Martinis, S.; Fissmer, B.; Rieke, C. Time series analysis of multi-frequency SAR backscatter and bistatic coherence in the context of flood mapping. In Proceedings of the 8th International Workshop on the Analysis of Multitemporal Remote Sensing Images (Multi-Temp) 2015, Annecy, France, 22–24 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Bartsch, A.; Trofaier, A.M.; Hayman, G.; Sabel, D.; Schlaffer, S.; Clark, D.B.; Blyth, E. Detection of open water dynamics with ENVISAT ASAR in support of land surface modelling at high latitudes. Biogeosciences 2012, 9, 703–714. [Google Scholar] [CrossRef]
- Chini, M.; Pelich, R.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR coherence to detect floodwater in urban areas: Houston and Hurricane Harvey as a test case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Oberstadler, R.; Hönsch, H.; Huth, D. Assessment of the mapping capabilities of ERS-1 SAR data for flood mapping: A case study in Germany. Hydrol. Process. 1997, 11, 1415–1425. [Google Scholar] [CrossRef]
- Townsend, P.A. Mapping seasonal flooding in forested wetlands using multi-temporal Radarsat SAR. Photogramm. Eng. Remote Sens. 2001, 67, 857–864. [Google Scholar]
- Mason, D.C.; Speck, R.; Devereux, B.; Schumann, G.J.P.; Neal, J.C.; Bates, P.D. Flood detection in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2010, 48, 882–894. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schuman, G.J.P.; Bates, P.D. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Guerriero, L.; Ferrazzoli, P. Flood monitoring using multi-temporal COSMO-SkyMed data: Image segmentation and signature interpretation. Remote Sens. Environ. 2011, 115, 990–1002. [Google Scholar] [CrossRef]
- Pierdicca, N.; Chini, M.; Pulvirenti, L.; Macina, F. Integrating Physical and Topographic Information into a fuzzy scheme to Map Flooded Area by SAR. Sensors 2008, 8, 4151–4164. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Westerhoff, R.S.; Kleuskens, M.P.H.; Winsemius, H.C.; Huizinga, H.J.; Brakenridge, G.R.; Bishop, C. Automated global water mapping based on wide-swath orbital synthetic-aperture radar. Hydrol. Earth Syst. Sci. 2013, 17, 651–663. [Google Scholar] [CrossRef]
- Refice, A.; Capolongo, D.; Pasquariello, G.; D’Addabbo, A.; Bovenga, F.; Nutricato, R.; Lovergine, F.P.; Pietranera, L. SAR and InSAR for flood monitoring: Examples with COSMO-SkyMed data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2711–2722. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Pasquariello, G.; Lovergine, F.; Capolongo, D.; Manfreda, S. A Bayesian Network for Flood Detection Combining SAR Imagery and Ancillary Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3612–3624. [Google Scholar] [CrossRef]
- Bazi, Y.; Bruzzone, L.; Melgani, F. An unsupervised approach based on the generalized Gaussian model to automatic change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 874–887. [Google Scholar] [CrossRef]
- Psomiadis, E. Flash flood area mapping utilising SENTINEL-1 radar data. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications VII, Edinburgh, UK, 27–29 September 2016. [Google Scholar]
- Uddin, K.; Matin, M.A.; Meyer, F.J. Operational flood mapping using multi-temporal sentinel-1 SAR images: A case study from Bangladesh. Remote Sens. 2019, 11, 1581. [Google Scholar] [CrossRef]
- Gebremichael, E.; Molthan, A.L.; Bell, J.R.; Schultz, L.A.; Hain, C. Flood hazard and risk assessment of extreme weather events using synthetic aperture radar and auxiliary data: A case study. Remote Sens. 2020, 12, 3588. [Google Scholar] [CrossRef]
- Karamvasis, K.; Karathanassi, V. FLOMPY: An Open-Source Toolbox for Floodwater Mapping Using Sentinel-1 Intensity Time Series. Water 2021, 13, 2943. [Google Scholar] [CrossRef]
- Ministry of Environment and Energy of Greece. Available online: https://floods.ypeka.gr/index.php?option=com_content&view=article&id=293&Itemid=785 (accessed on 5 June 2022).
- Copernicus Open Access Hub of the European Space Agency. Available online: https://scihub.copernicus.eu/ (accessed on 13 November 2021).
- US Army Corps of Engineers Hydrologic Engineering Center. Available online: https://www.hec.usace.army.mil/software/hec-hms/ (accessed on 10 February 2022).
- Copernicus Land Monitoring Service. Available online: https://land.copernicus.eu/imagery-in-situ/eu-dem/eu-dem-v1.1 (accessed on 10 November 2021).
- Federal Institute for Geosciences and Natural Resources of Germany. Available online: https://www.bgr.bund.de/EN/Home/homepage_node_en.html (accessed on 10 November 2021).
- Chin, D.A.; Mazumdar, A.; Roy, P.K. Water-Resources Engineering; Prentice Hall: Englewood Cliffs, NJ, USA, 2000; Volume 12. [Google Scholar]
- Qaiser, K.; Yuan, Y.; Lopez, R.D. Urbanization impacts on flooding in the Kansas River Basin and evaluation of wetlands as a mitigation measure. Trans. ASABE 2012, 55, 849–859. [Google Scholar] [CrossRef]
- Dasallas, L.; Kim, Y.; An, H. Case study of HEC-RAS 1D–2D coupling simulation: 2002 Baeksan flood event in Korea. Water 2019, 11, 2048. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS River Analysis System Hydraulic Reference Manual, Version 6.0; US Army Corps of Engineers Hydrologic Engineering Center: Davis, CA, USA, 2020. [Google Scholar]
- Sarker, S. A Short Review on Computational Hydraulics in the Context of Water Resources Engineering. Open J. Model. Simul. 2022, 10, 1–31. [Google Scholar] [CrossRef]
- Sarker, S. Essence of MIKE 21C (FDM Numerical Scheme): Application on the River Morphology of Bangladesh. Open J. Model. Simul. 2022, 10, 88–117. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS, River Analysis System Hydraulic Reference Manual, Version 5.0; US Army Corps of Engineers Hydrologic Engineering Center: Davis, CA, USA, 2016. [Google Scholar]
- Huang, Y. Rapid flood risk assessment using GIS technology. Int. J. River Basin Manag. 2009, 7, 3–14. [Google Scholar] [CrossRef]
- Harris County Flood Control District (HCFCD). Two-Dimensional Modeling Guidelines; Harris County Flood Control District (HCFCD): Houston, TX, USA, 2018; Available online: https://www.google.com/search?q=72.+Harris+County+Flood+Control+District+(HCFCD).+Two-Dimensional+Modeling+Guidelines&oq=72.%09Harris+County+Flood+Control+District+(HCFCD).+Two-Dimensional+Modeling+Guidelines&aqs=chrome..69i57.460j0j4&sourceid=chrome&ie=UTF-8 (accessed on 5 December 2022).
- Louisiana Department of Transportation and Development (LA DOTD). Amite River Basin Numerical Model 2019. Available online: https://watershed.la.gov/assets/docs/ARBNM_Project_Report_03252019.pdf (accessed on 5 December 2022).
- Babister, M.; Barton, C. Australian Rainfall and Runoff Revision Project 15: Two Dimensional Modelling in Urban and Rural Floodplains, Stage 1 & 2 Report, P15/S1/009, Engineers Australia, Engineering House 11, National Circuit, Barton ACT 2600, Australia, 2012. Available online: https://arr.ga.gov.au/__data/assets/pdf_file/0019/40573/ARR_Project15_TwoDimensional_Modelling_DraftReport.pdf (accessed on 5 December 2022).
- Davtalab, R.; Mirchi, A.; Harris, R.J.; Troilo, M.X.; Madani, K. Sea Level Rise Effect on Groundwater Rise and Stormwater Retention Pond Reliability. Water 2020, 12, 1129. [Google Scholar] [CrossRef]
- Wing, O.; Bates, P.; Sampson, C.; Smith, A.; Johnson, K.; Erickson, T. Validation of a 30 m resolution flood hazard model of the conterminous United States. Water Resour. Res. 2017, 53, 7968–7986. [Google Scholar] [CrossRef]
- Afzal, M.A.; Ali, S.; Nazeer, A.; Khan, M.I.; Waqas, M.M.; Aslam, R.A.; Cheema, M.J.M.; Nadeem, M.; Saddique, N.; Muzammil, M.; et al. Flood Inundation Modeling by Integrating HEC–RAS and Satellite Imagery: A Case Study of the Indus River Basin. Water 2022, 14, 2984. [Google Scholar] [CrossRef]
- Elkhrachy, I.; Pham, Q.B.; Costache, R.; Mohajane, M.; Rahman, K.U.; Shahabi, H.; Linh, N.T.T.; Anh, D.T. Sentinel-1 remote sensing data and Hydrologic Engineering Centres River Analysis System two-dimensional integration for flash flood detection and modelling in New Cairo City, Egypt. J. Flood Risk Manag. 2021, 14, e12692. [Google Scholar] [CrossRef]
- Pertiwi, A.P.; Roth, A.; Schaffhauser, T.; Bhola, P.K.; Reuß, F.; Stettner, S.; Kuenzer, C.; Disse, M. Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products. Remote Sens. 2021, 13, 4695. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Delmotte, A.; Fatras, C.; Kettig, P.; Piacentini, A.; Ricci, S. Validation and improvement of data assimilation for flood hydrodynamic modelling using SAR imagery data. arXiv 2021, arXiv:2109.07470. [Google Scholar]
- Ekeu-wei, I.T.; Blackburn, G.A. Catchment-Scale Flood Modelling in Data-Sparse Regions Using Open-Access Geospatial Technology. ISPRS Int. J. Geo-Inf. 2020, 9, 512. [Google Scholar] [CrossRef]
- Lamichhane, N.; Sharma, S. Effect of input data in hydraulic modeling for flood warning systems. Hydrol. Sci. J. 2018, 63, 938–956. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V.; Jafarzadegan, K. Investigating the role of model structure and surface roughness in generating flood inundation extents using one- and two-dimensional hydraulic models. J. Flood Risk Manag. 2019, 12, e12347. [Google Scholar] [CrossRef]
- Annis, A.; Nardi, F.; Volpi, E.; Fiori, A. Quantifying the relative impact of hydrological and hydraulic modelling parameterizations on uncertainty of inundation maps. Hydrol. Sci. J. 2020, 65, 507–523. [Google Scholar] [CrossRef]
- Vojtek, M.; Petroselli, A.; Vojteková, J.; Asgharinia, S. Flood inundation mapping in small and ungauged basins: Sensitivity analysis using the EBA4SUB and HEC-RAS modeling approach. Hydrol. Res. 2019, 50, 1002–1019. [Google Scholar] [CrossRef]
- Mosquera-Machado, S.; Ahmad, S. Flood hazard assessment of Atrato river in Colombia. Water Resour. Manag. 2007, 21, 591–609. [Google Scholar] [CrossRef]
- Ghimire, E.; Sharma, S.; Lamichhane, N. Evaluation of one-dimensional and two-dimensional HEC-RAS models to predict flood travel time and inundation area for flood warning system. ISH J. Hydraul. Eng. 2022, 28, 110–126. [Google Scholar] [CrossRef]
- Dimitriadis, P.; Tegos, A.; Oikonomou, A.; Pagana, V.; Koukouvinos, A.; Mamassis, N.; Koutsoyiannis, D.; Efstratiadis, A. Comparative evaluation of 1D and quasi-2D hydraulic models based on benchmark and real-world applications for uncertainty assessment in flood mapping. J. Hydrology 2016, 534, 478–492. [Google Scholar] [CrossRef]
- Samarasinghe, J.T.; Basnayaka, V.; Gunathilake, M.B.; Azamathulla, H.M.; Rathnayake, U. Comparing Combined 1D/2D and 2D Hydraulic simulations using high-resolution topographic data: Examples from Sri Lanka—Lower Kelani River Basin. Hydrology 2022, 9, 39. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P.; Giupponi, C. Flood depth estimation by means of high-resolution SAR images and lidar data. Nat. Hazards Earth Syst. Sci. 2018, 18, 3063–3084. [Google Scholar] [CrossRef]
- Hao, C.; Yunus, A.P.; Subramanian, S.S.; Avtar, R. Basin-wide flood depth and exposure mapping from SAR images and machine learning models. J. Environ. Manag. 2021, 297, 113367. [Google Scholar] [CrossRef] [PubMed]
- Parida, B.R.; Tripathi, G.; Pandey, A.C.; Kumar, A. Estimating floodwater depth using SAR-derived flood inundation maps and geomorphic model in kosi river basin (India). Geocarto Int. 2022, 37, 4336–4360. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Corine LU Code | Corine LU Description | % of Total Model Area | % of Total Inundated Area | LU Reclassification According to 2D Modeling User’s Manual | Manning Roughness Coefficient Ranges (s/m1/3) | |
|---|---|---|---|---|---|---|
| HEC-RAS LU Categorization | Reclassified LU Code | |||||
| 112 | Discontinuous urban fabric | 2.3 | 0.0 | Developed, Medium Intensity | 1 | 0.06–0.20 |
| 122 | Road and rail networks and associated land | 1.3 | 0.2 | Paved roads/car park/driveways | 2 | 0.03–0.05 |
| 133 | Construction sites | 2.2 | 1.3 | Construction sites | 3 | 0.10–0.14 |
| 211 | Non-irrigated arable land | 1.8 | 4.7 | Cultivated Crops | 4 | 0.03–0.30 |
| 212 | Permanently irrigated land | 48.7 | 76.3 | |||
| 223 | Olive groves | 5.6 | 0.0 | |||
| 242 | Complex cultivation patterns | 6.6 | 0.0 | |||
| 213 | Rice fields | 28.4 | 16.4 | Emergent Herbaceous Wetlands | 5 | 0.03–0.30 |
| 411 | Inland marshes | 0.1 | 0.0 | |||
| 421 | Salt marshes | 0.3 | 0.5 | |||
| 243 | Land principally occupied by agriculture | 0.6 | 0.6 | Pasture/grasslands | 6 | 0.03–0.40 |
| 311 | Broad-leaved forest | 0.3 | 0.0 | Mixed forests (either deciduous or evergreen) | 7 | 0.07–0.40 |
| 313 | Mixed forest | 0.0 | 0.0 | |||
| 323 | Sclerophyllous vegetation | 0.2 | 0.0 | |||
| 324 | Transitional woodland-shrub | 1.2 | 0.0 | Shrub/scrub | 8 | 0.05–0.40 |
| 331 | Beaches, dunes, sands | 0.6 | 0.1 | Barren Land (Rock/Sand/Clay) | 9 | 0.03–0.10 |
| LU Code | Established Roughness Coefficient Range | Mean Roughness Coefficient Value | Max Roughness Coefficient Value | Min Roughness Coefficient Value | 25% of Total Range | 75% of Total Range |
|---|---|---|---|---|---|---|
| 2D Flow Areas | ||||||
| 1 | 0.06–0.20 | 0.13 | 0.20 | 0.06 | 0.10 | 0.17 |
| 2 | 0.03–0.05 | 0.04 | 0.05 | 0.03 | 0.035 | 0.045 |
| 3 | 0.10–0.14 | 0.12 | 0.14 | 0.10 | 0.11 | 0.13 |
| 4 | 0.03–0.30 | 0.17 | 0.30 | 0.03 | 0.10 | 0.23 |
| 5 | 0.03–0.30 | 0.17 | 0.30 | 0.03 | 0.10 | 0.23 |
| 6 | 0.03–0.40 | 0.22 | 0.40 | 0.03 | 0.12 | 0.31 |
| 7 | 0.07–0.40 | 0.24 | 0.40 | 0.07 | 0.15 | 0.32 |
| 8 | 0.05–0.40 | 0.23 | 0.40 | 0.05 | 0.14 | 0.31 |
| 9 | 0.03–0.10 | 0.07 | 0.10 | 0.03 | 0.05 | 0.08 |
| River segment | 1D river | |||||
| Lower river reaches (4, 5, 7) | 0.03–0.05 | 0.04 | 0.05 | 0.03 | 0.035 | 0.045 |
| Middle river reaches (2, 6) | 0.04–0.06 | 0.05 | 0.06 | 0.04 | 0.045 | 0.055 |
| Upper river reaches (1, 3) | 0.05–0.07 | 0.06 | 0.07 | 0.05 | 0.055 | 0.065 |
| Inflow Hydrograph Derived from MCA Analysis | Model-Predicted Inundation Area (km2) | Index (%) | |||||
|---|---|---|---|---|---|---|---|
| 1st Approach (Simplified) | 2nd Approach (FLOMPY) | ||||||
| CSI | HR | FAR | CSI | HR | FAR | ||
| Minimum | 11.13 | 16.74 | 41.9 | 78.2 | 21.95 | 36.9 | 64.9 |
| Mean minus standard deviation | 13.27 | 17.80 | 49.8 | 78.3 | 24.36 | 44.1 | 64.8 |
| Mean | 15.06 | 18.95 | 57.4 | 77.9 | 26.88 | 51.3 | 63.9 |
| Mean plus standard deviation | 16.71 | 18.89 | 61.8 | 78.6 | 27.21 | 55.1 | 65.0 |
| Maximum | 20.15 | 17.60 | 67.1 | 80.7 | 26.31 | 60.4 | 68.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zotou, I.; Karamvasis, K.; Karathanassi, V.; Tsihrintzis, V.A. Potential of Two SAR-Based Flood Mapping Approaches in Supporting an Integrated 1D/2D HEC-RAS Model. Water 2022, 14, 4020. https://doi.org/10.3390/w14244020
Zotou I, Karamvasis K, Karathanassi V, Tsihrintzis VA. Potential of Two SAR-Based Flood Mapping Approaches in Supporting an Integrated 1D/2D HEC-RAS Model. Water. 2022; 14(24):4020. https://doi.org/10.3390/w14244020
Chicago/Turabian StyleZotou, Ioanna, Kleanthis Karamvasis, Vassilia Karathanassi, and Vassilios A. Tsihrintzis. 2022. "Potential of Two SAR-Based Flood Mapping Approaches in Supporting an Integrated 1D/2D HEC-RAS Model" Water 14, no. 24: 4020. https://doi.org/10.3390/w14244020
APA StyleZotou, I., Karamvasis, K., Karathanassi, V., & Tsihrintzis, V. A. (2022). Potential of Two SAR-Based Flood Mapping Approaches in Supporting an Integrated 1D/2D HEC-RAS Model. Water, 14(24), 4020. https://doi.org/10.3390/w14244020