


An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk

 ,
,
Abstract
:1. Introduction
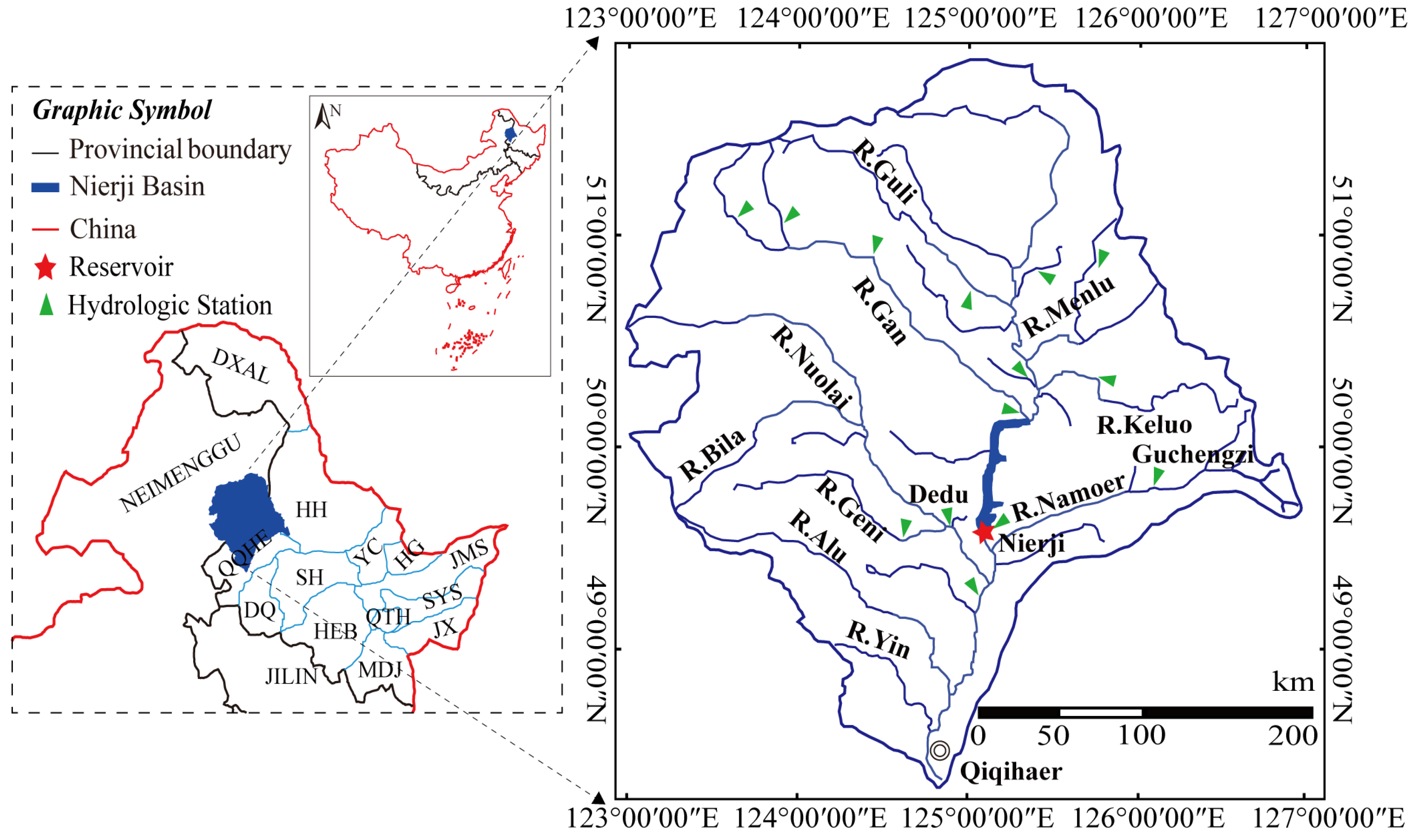
2. Study Area
3. Methods
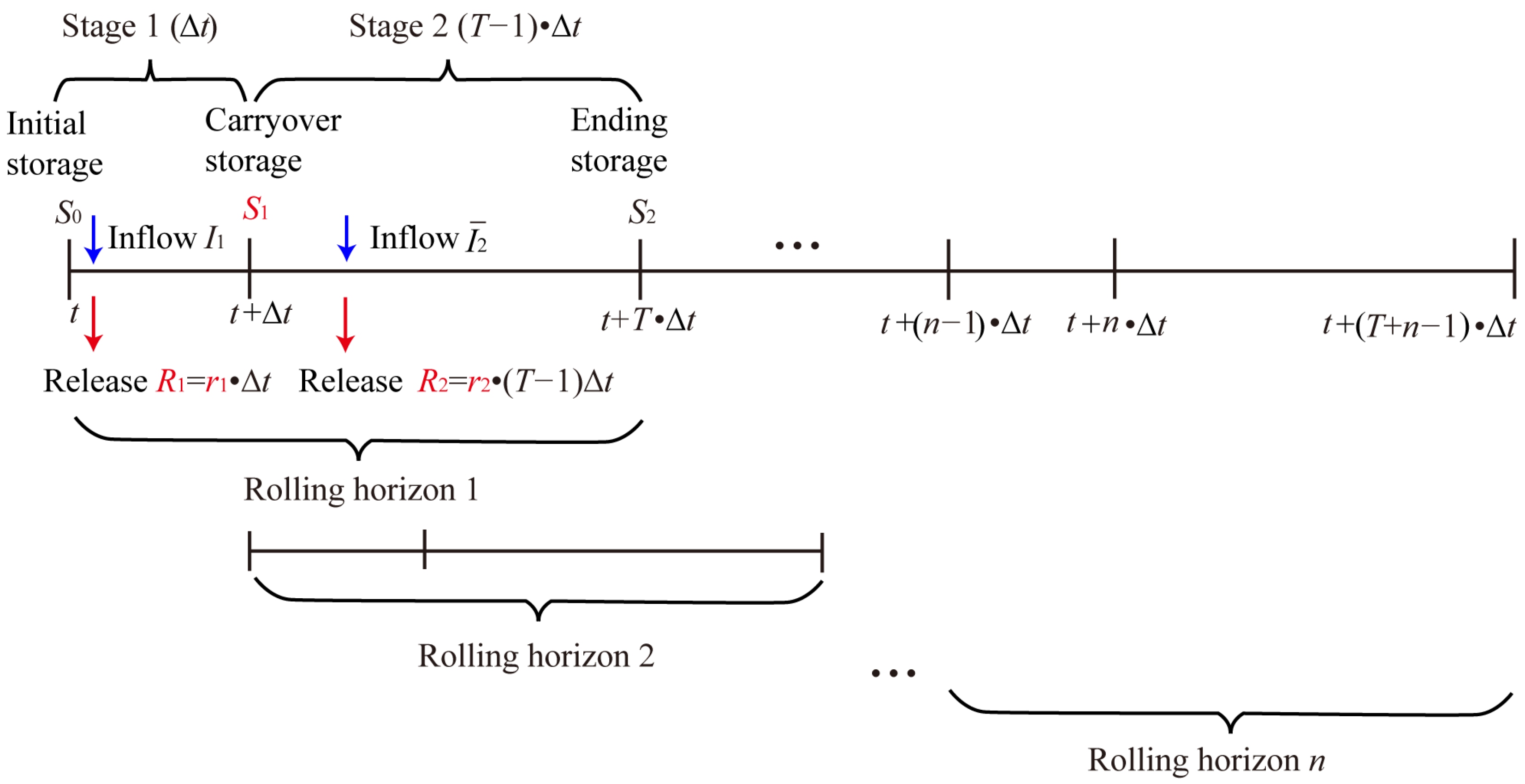
3.1. The Dynamic Control of Carryover Storage (DCCS)
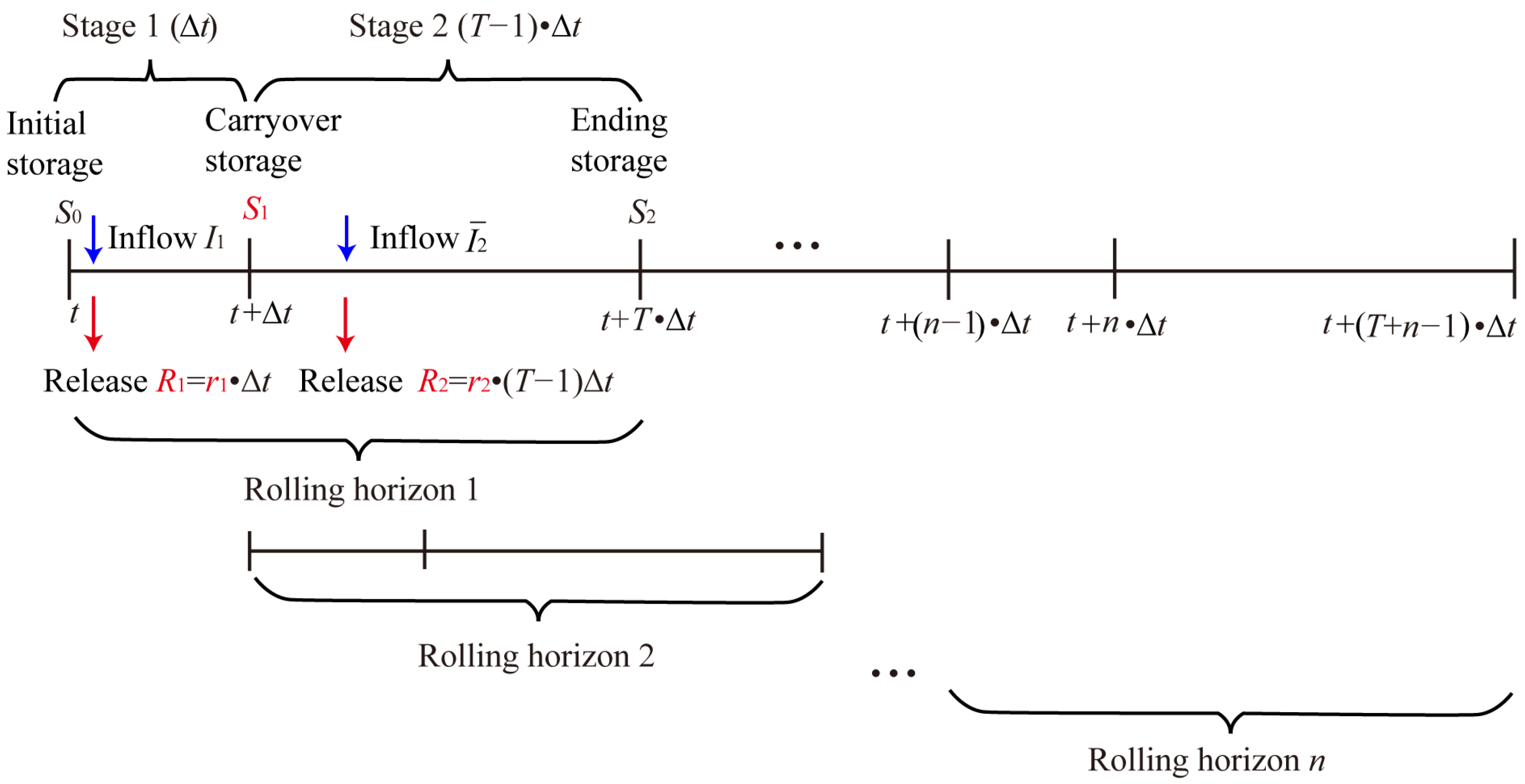
3.1.1. Two-Stage Model
3.1.2. Forecast Errors and Flood Risk
3.1.3. Power Generation in Two Stages
3.2. Model Formulation
3.2.1. Objective Function
3.2.2. Constraints
3.2.3. Optimal Conditions
3.3. Trade-Offs between Power Generation and Flood Risk
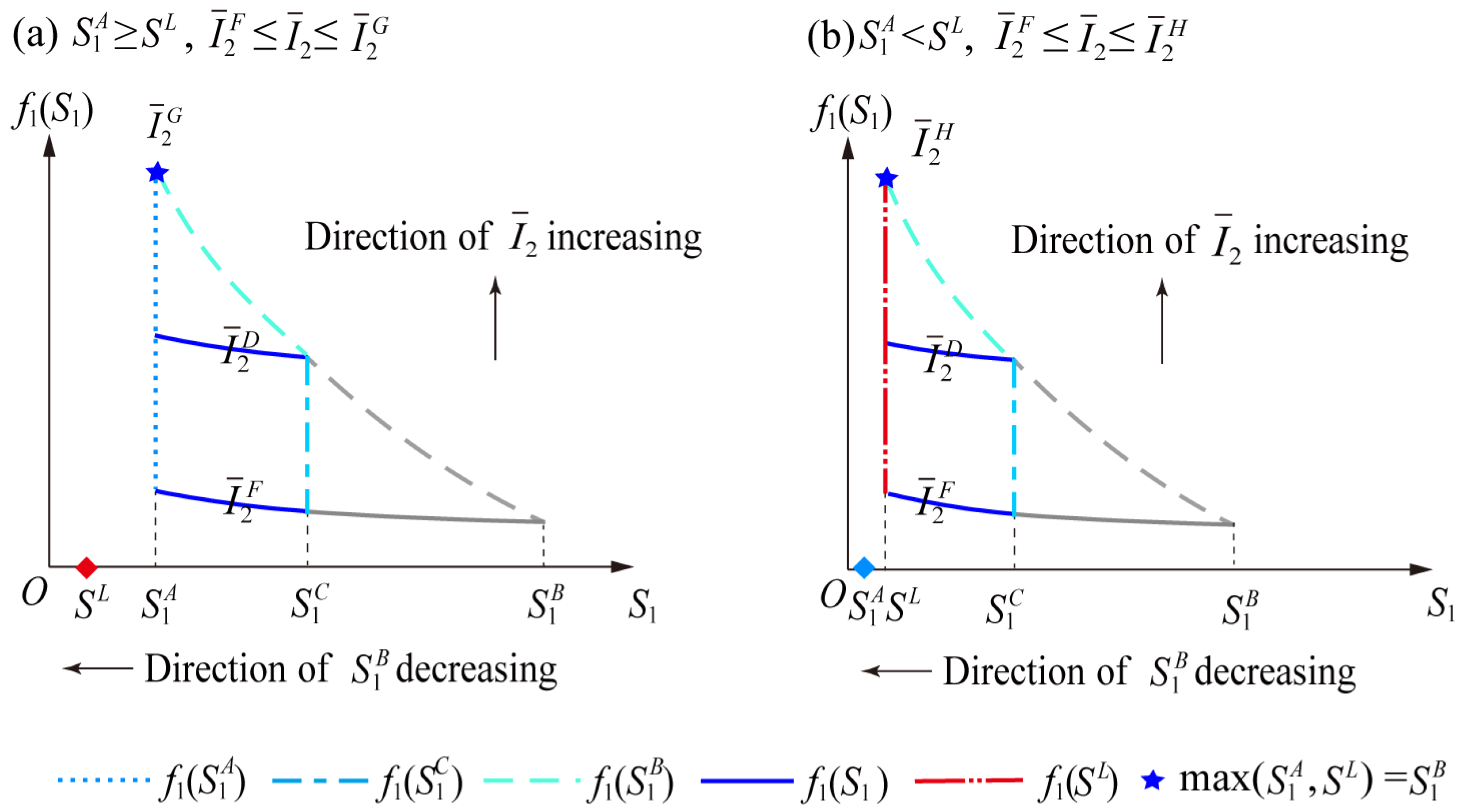
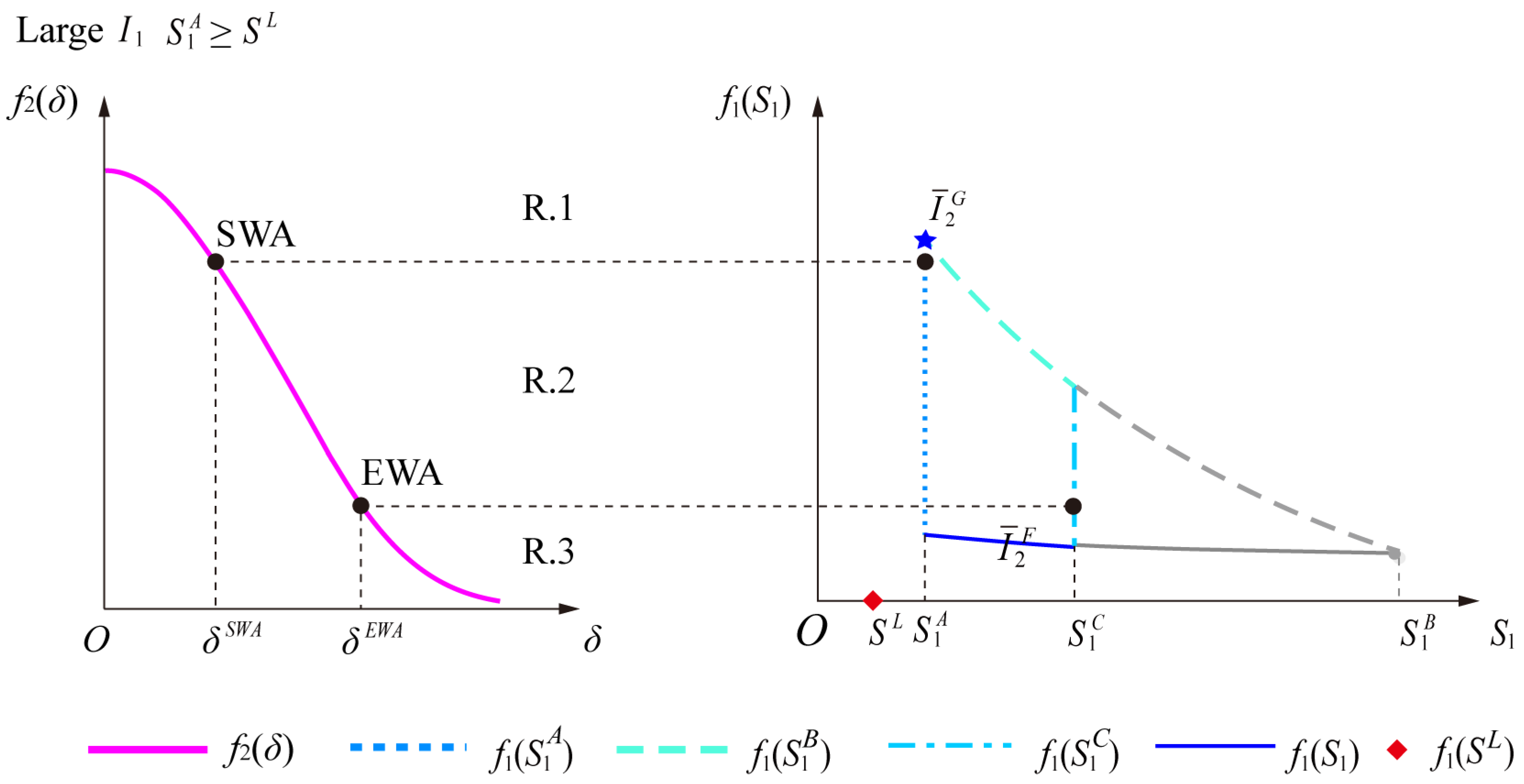
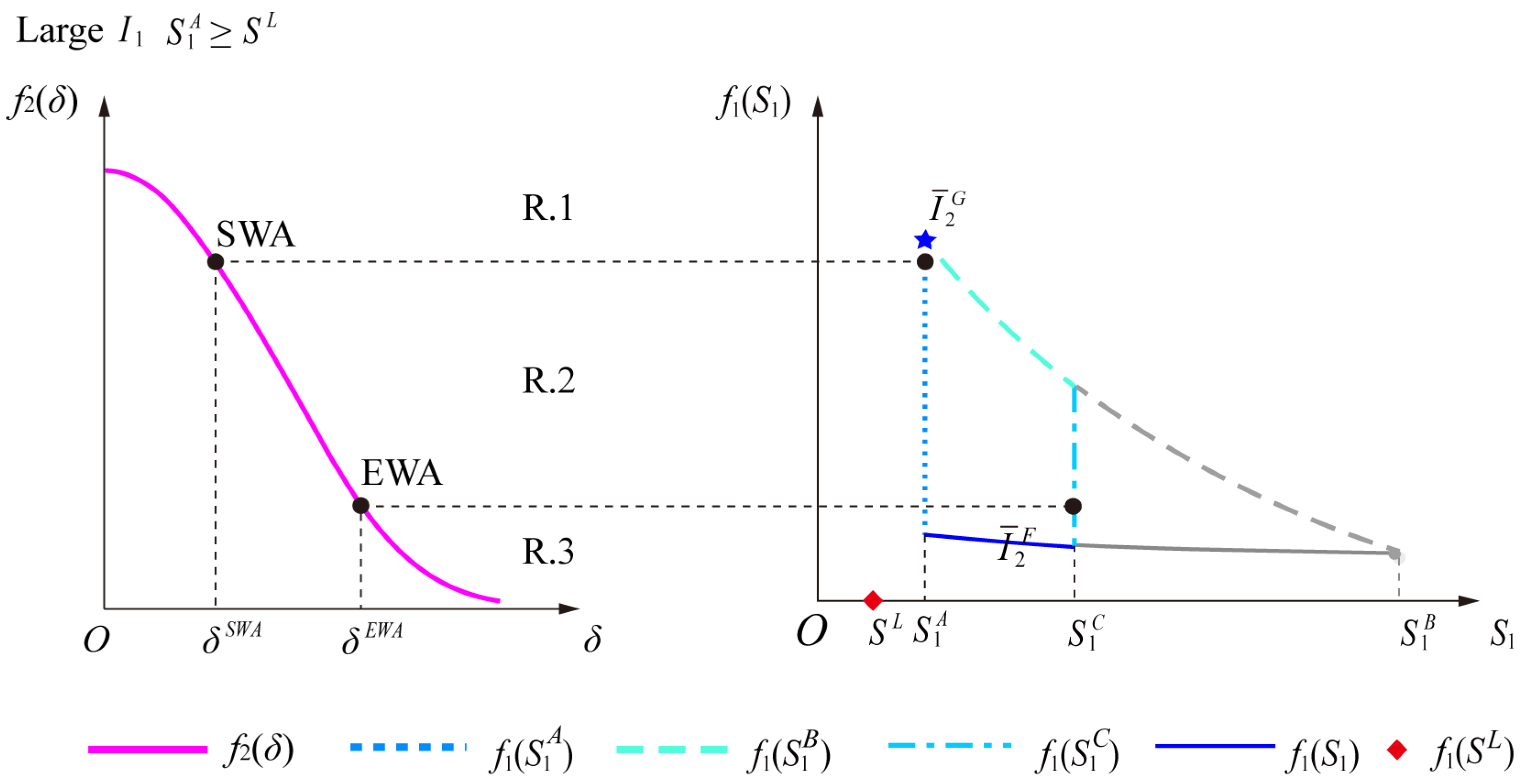
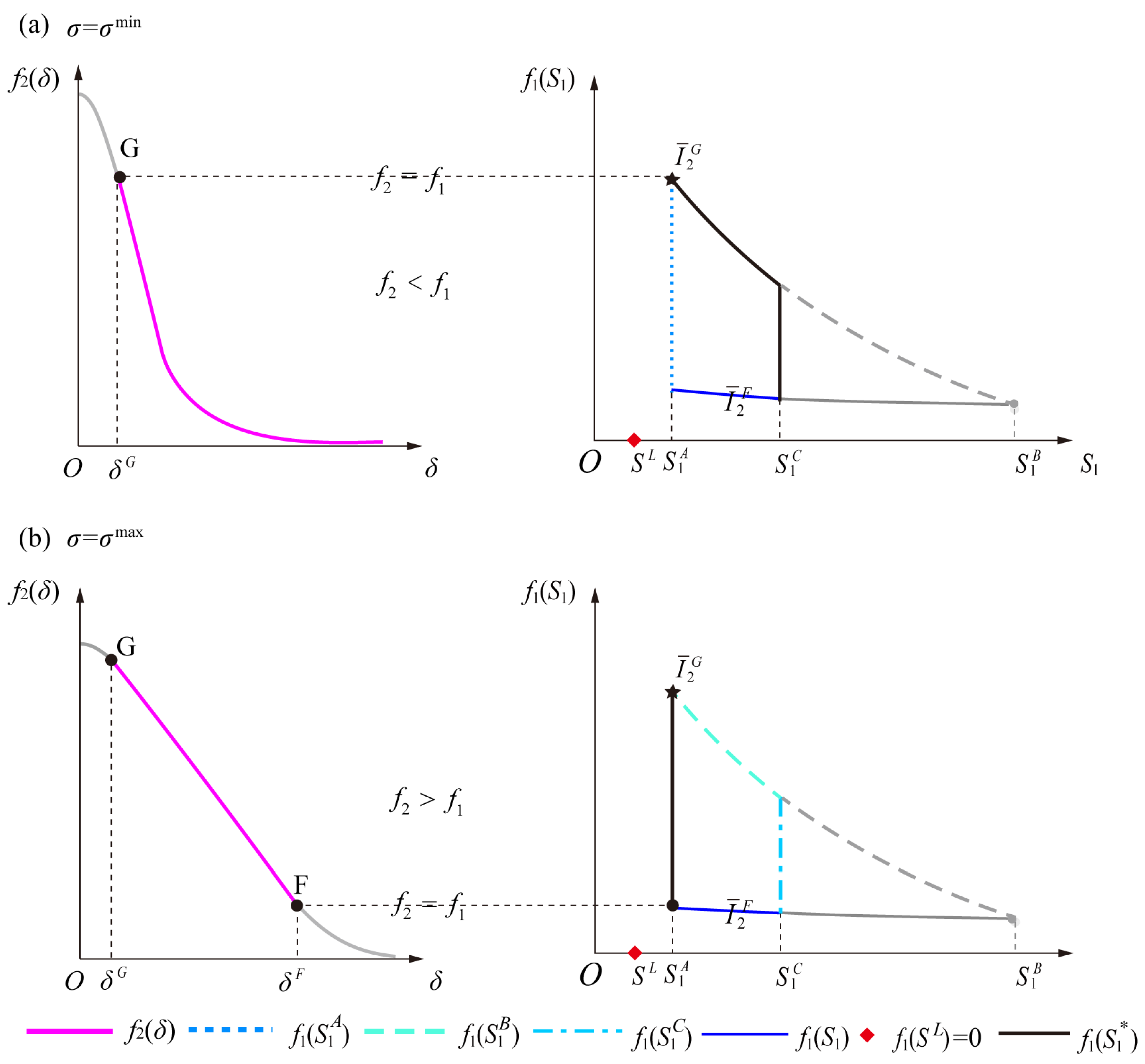
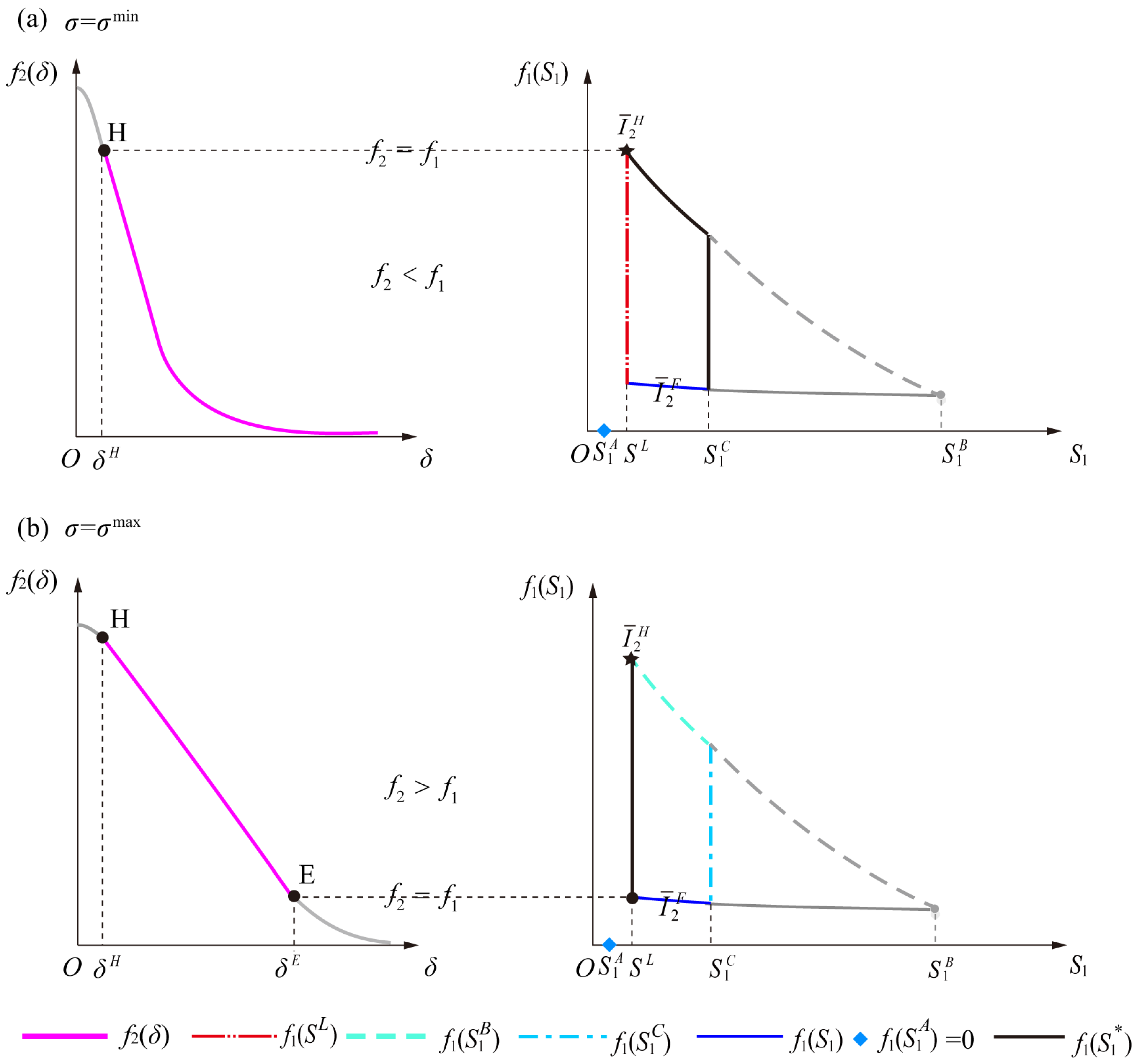
3.3.1. Evaluation of the Marginal Utility of Power Generation
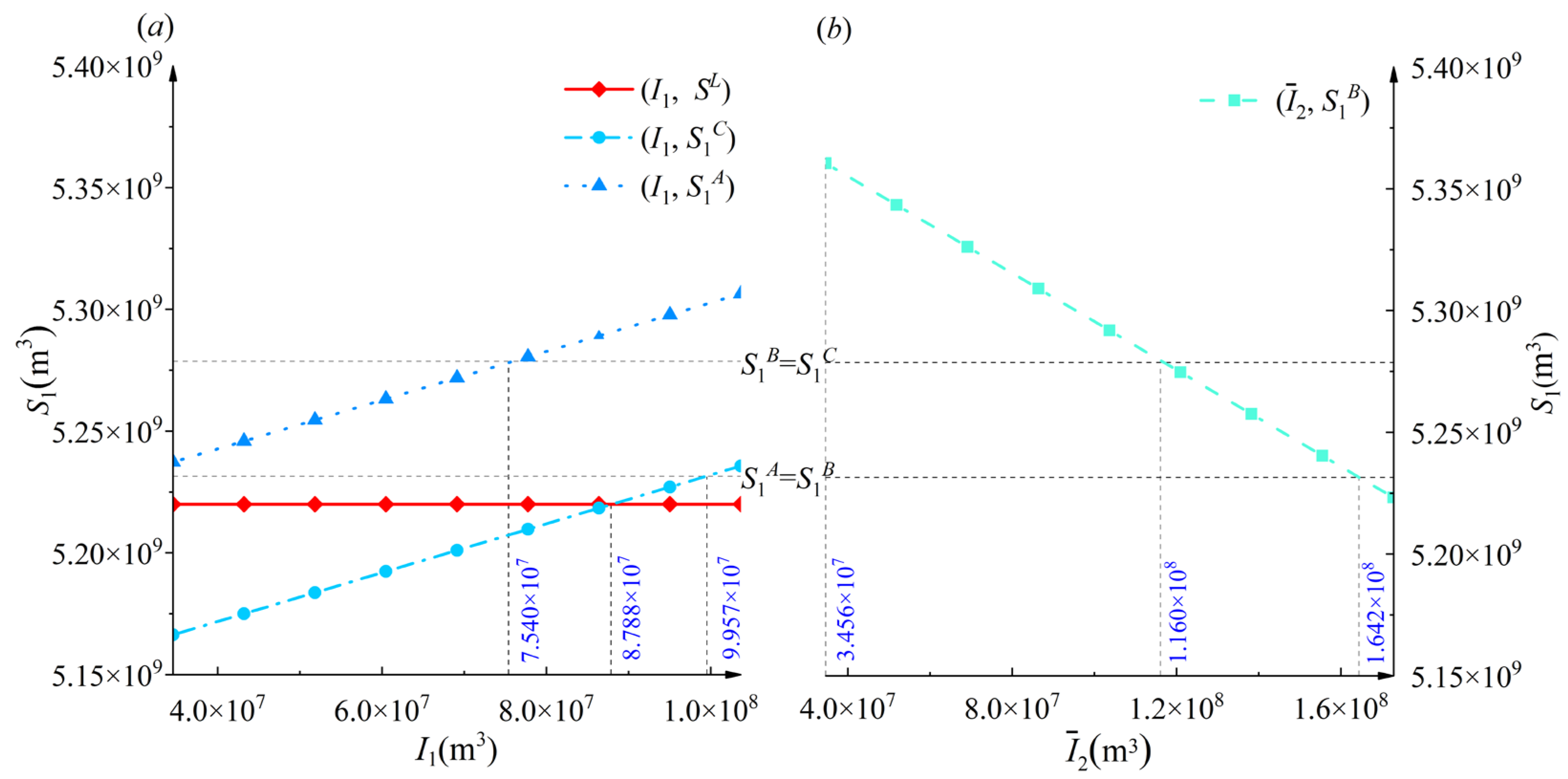
3.3.2. The Starting and Ending Points of Hedging
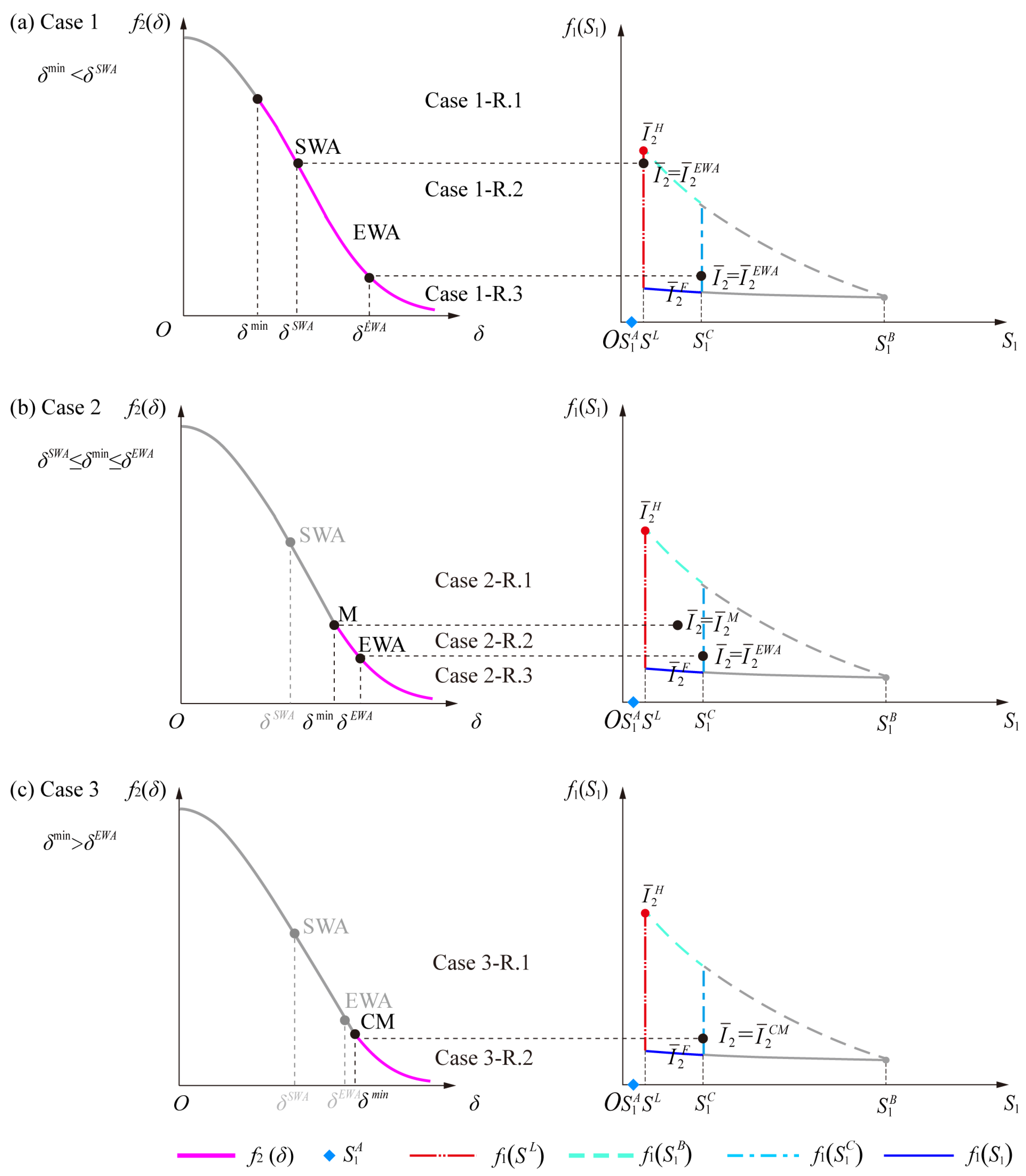
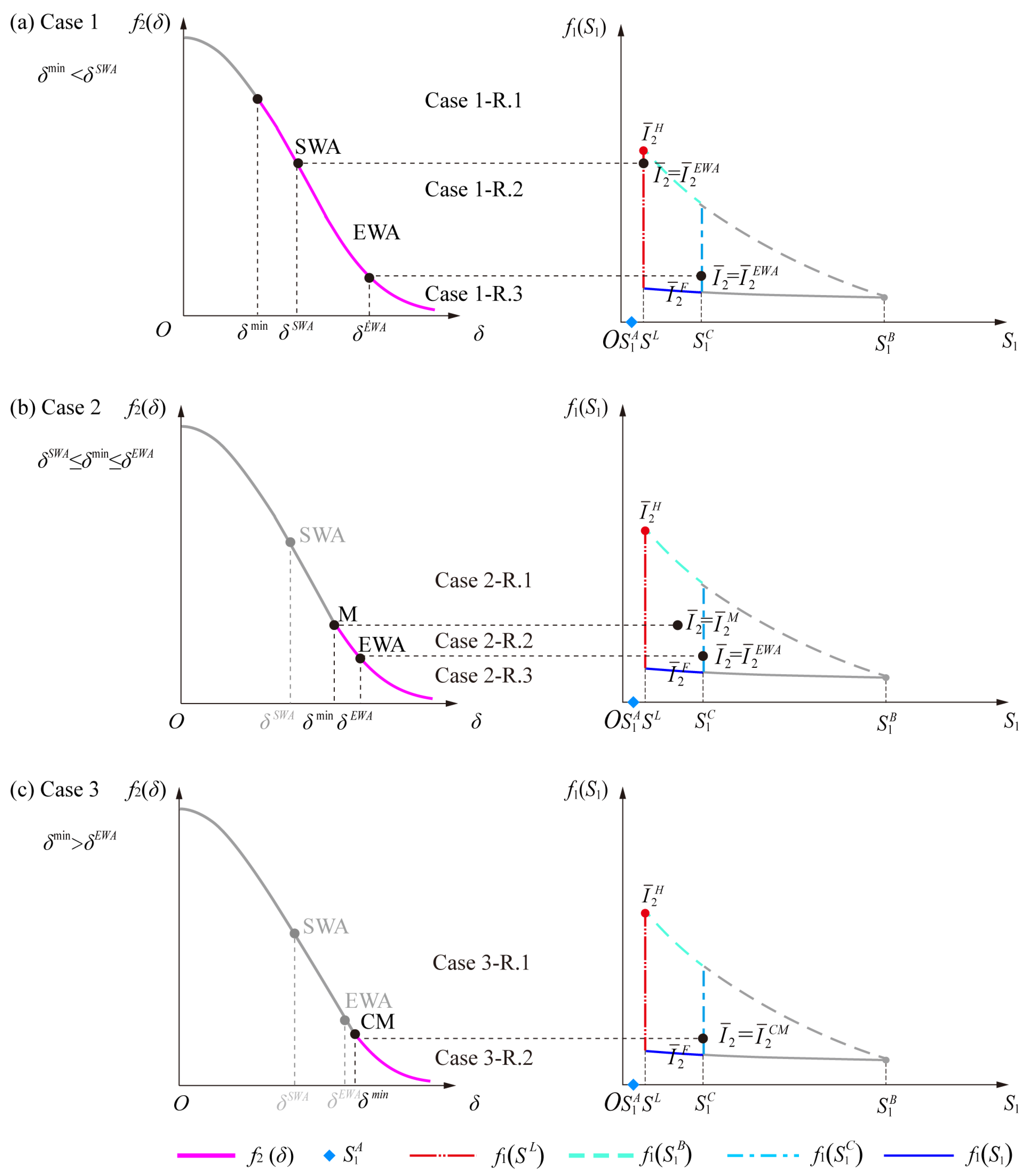
- R.1:
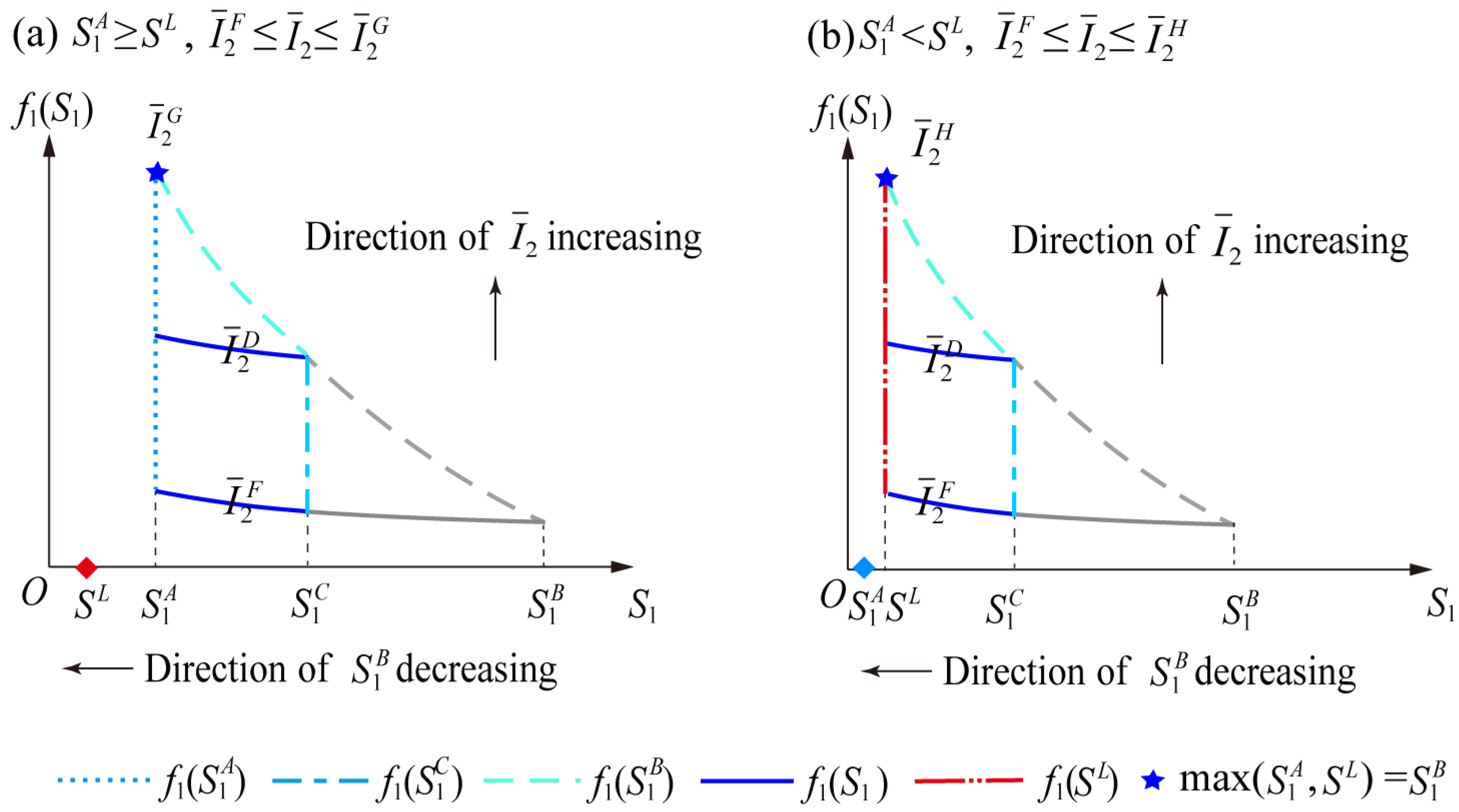
- When the forecasted inflow () ranges from to or from to , the relatively large inflow illustrates a large flood risk, and the MUFR exceeds MUPG under optimal conditions in Appendix B1, i.e., f2(δ*) > f2(δSWA) = f1() or f2(δ*) > f2(δSWA) = f1(SL). As a result, carryover storage should be kept at its lowest level in order to accommodate a large, forecasted inflow and to reduce the potential flood risk in Stage 2. Under the lower bound , the optimal carryover storage and flood-safety margin are = , δ* = Qthres + SL − − . When the lower bound is SL, they are written as = SL, δ* = Qthres − .
- R.2.:
- When ranges from to , more carryover storage brings more power generation but also higher flood risk. The optimal carryover storage and flood-safety margin are to equalize the marginal utility, i.e., f2(δ*) = f1().
- R.3.:
- When ranges from to , the relatively small inflow shows that floodwater can be carried over to the next stage as much as possible, and the MUPG is always greater than MUFR based on Equation (A9), i.e., f1() > f2(δEWA) = f2(δ*). Therefore, the carryover storage should be kept at the upper bound of carryover storage, namely, Stage 1 releases the downstream water demand Rmin 1, and the remaining available water from Stage 1 is carried over to Stage 2 to increase power generation due to the relatively small forecasted inflow, i.e., = , δ* = Qthres + SL − − .
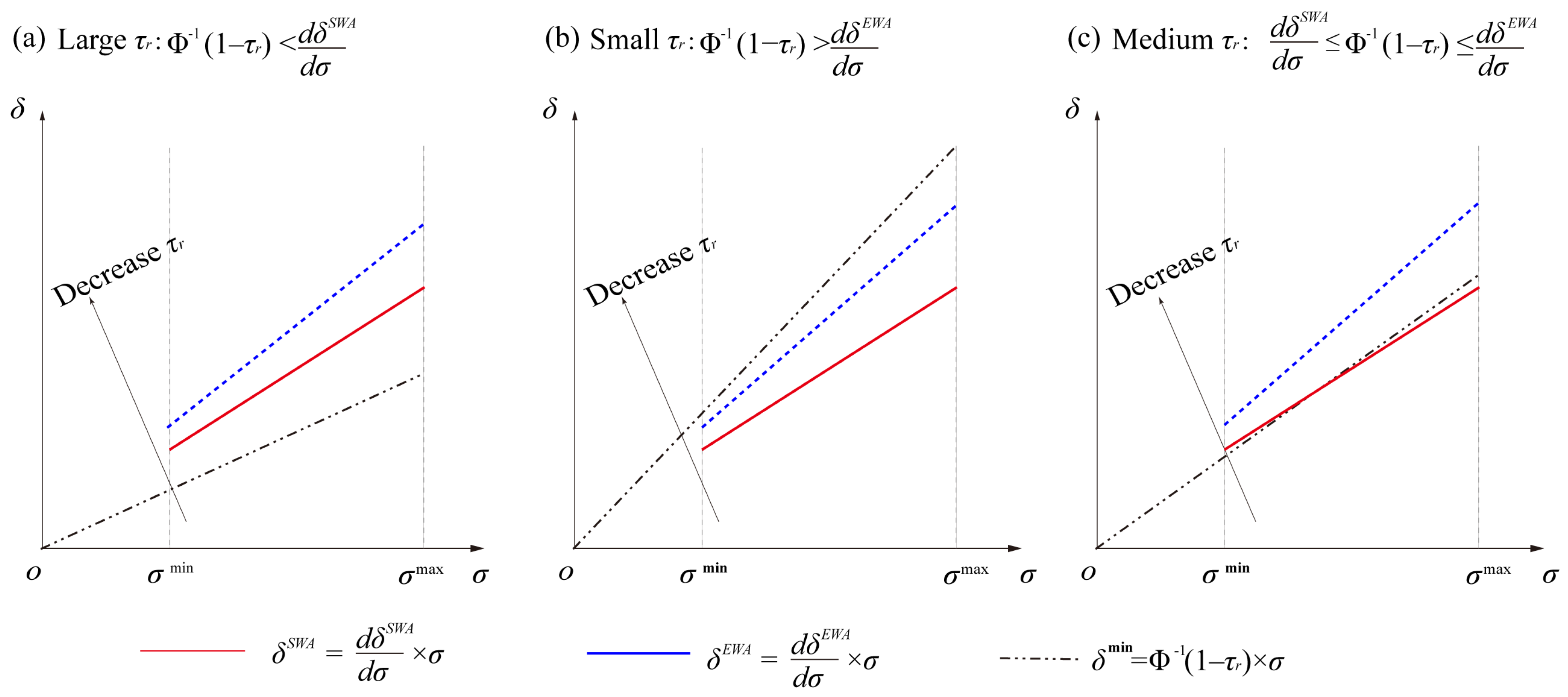
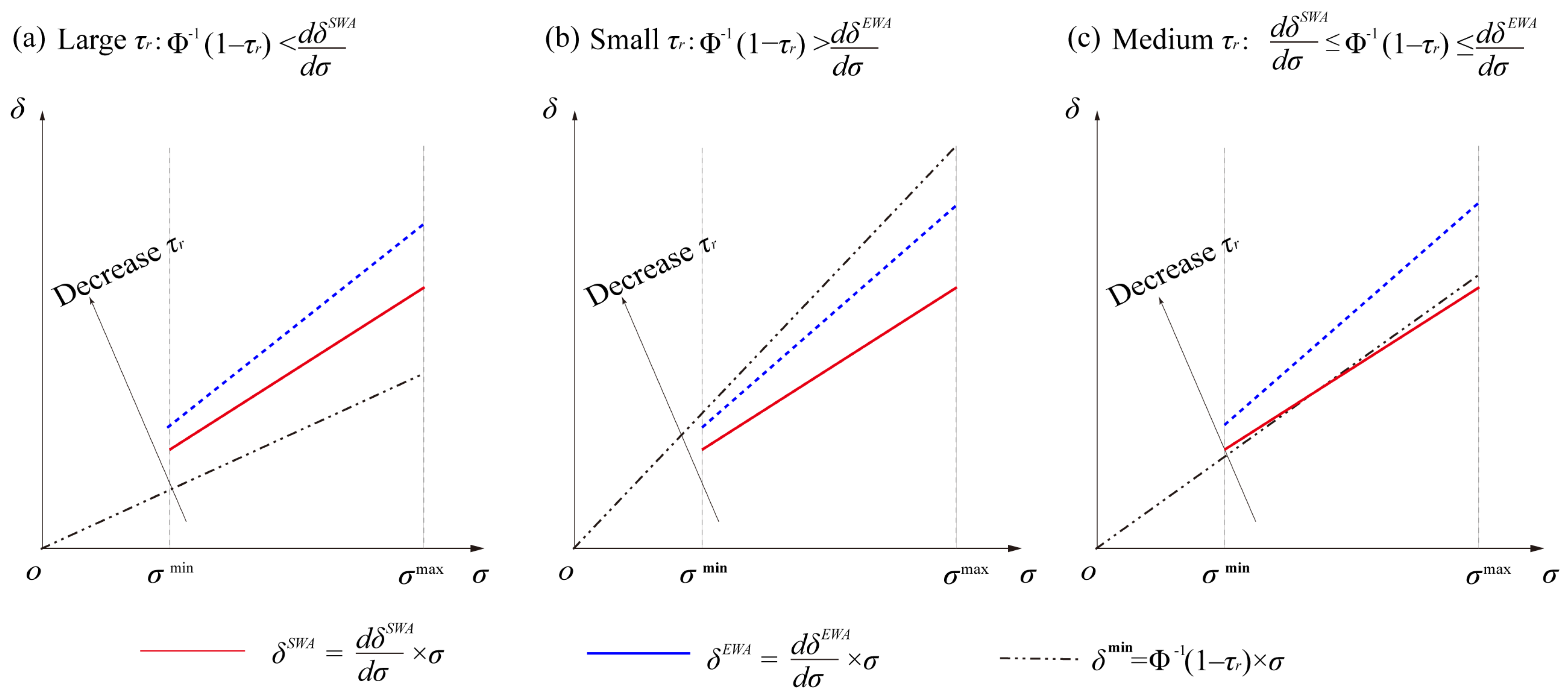
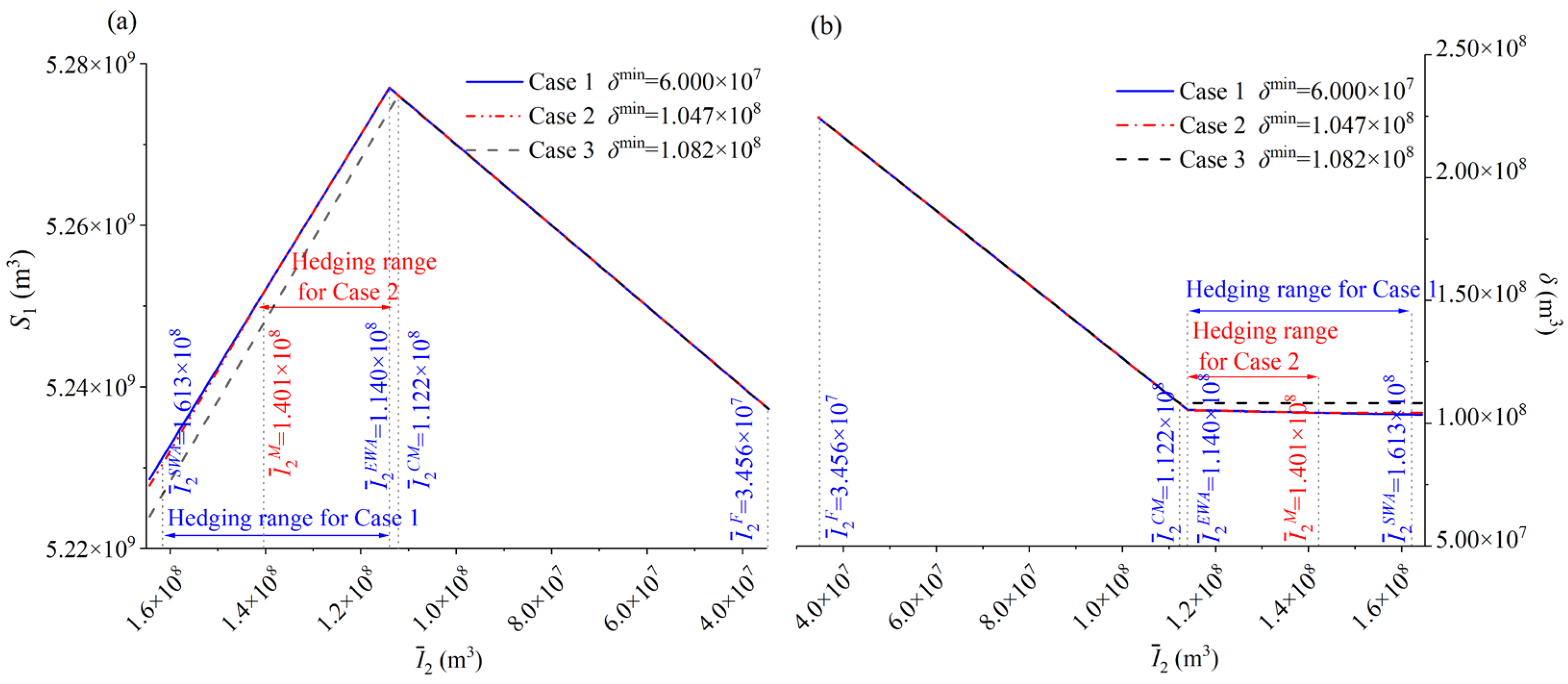
3.3.3. Effects of Forecast Uncertainty and Risk Tolerance
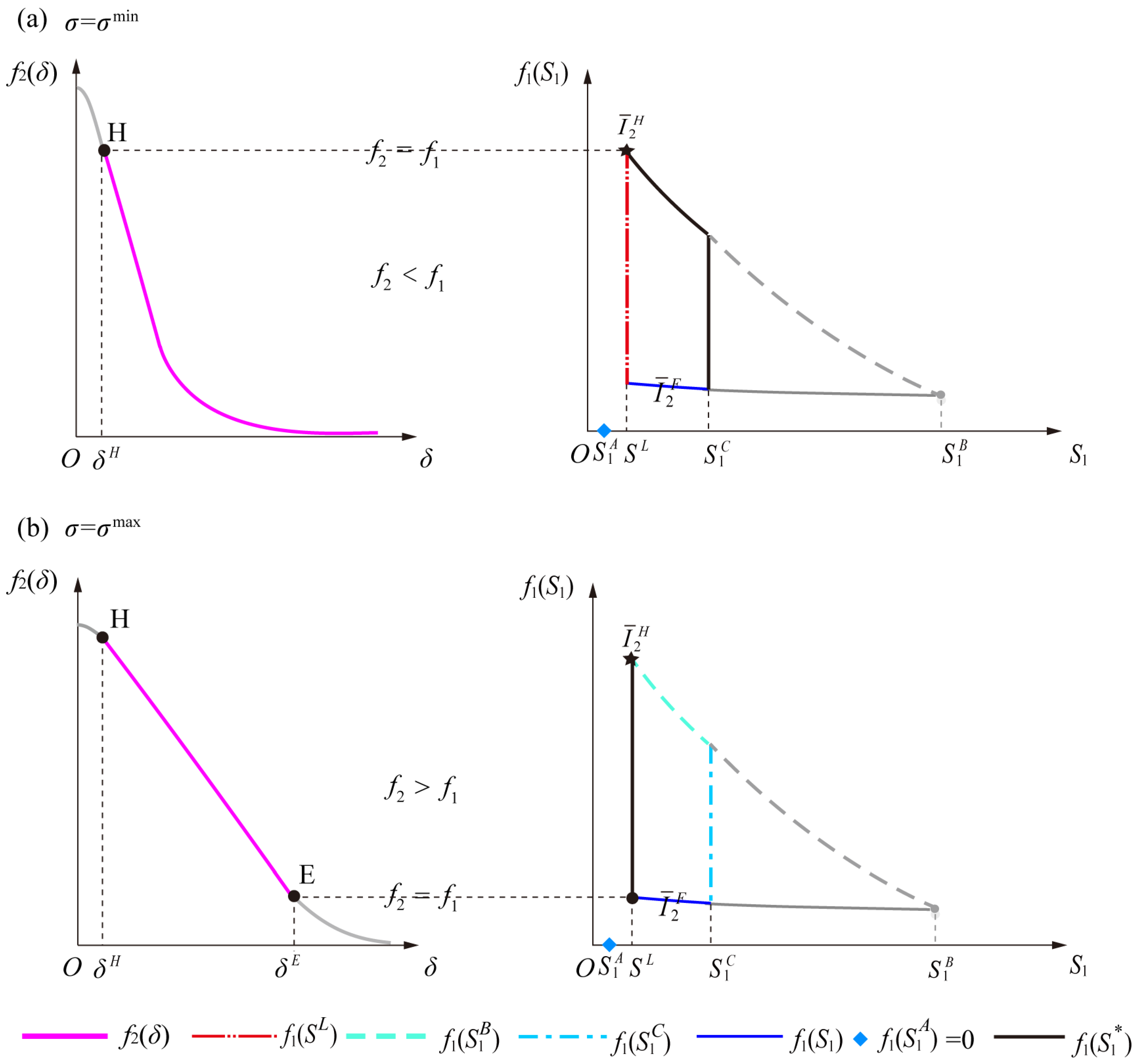
- The allowable forecast uncertainty
- 2.
- Combined impacts of forecast uncertainty and risk tolerance
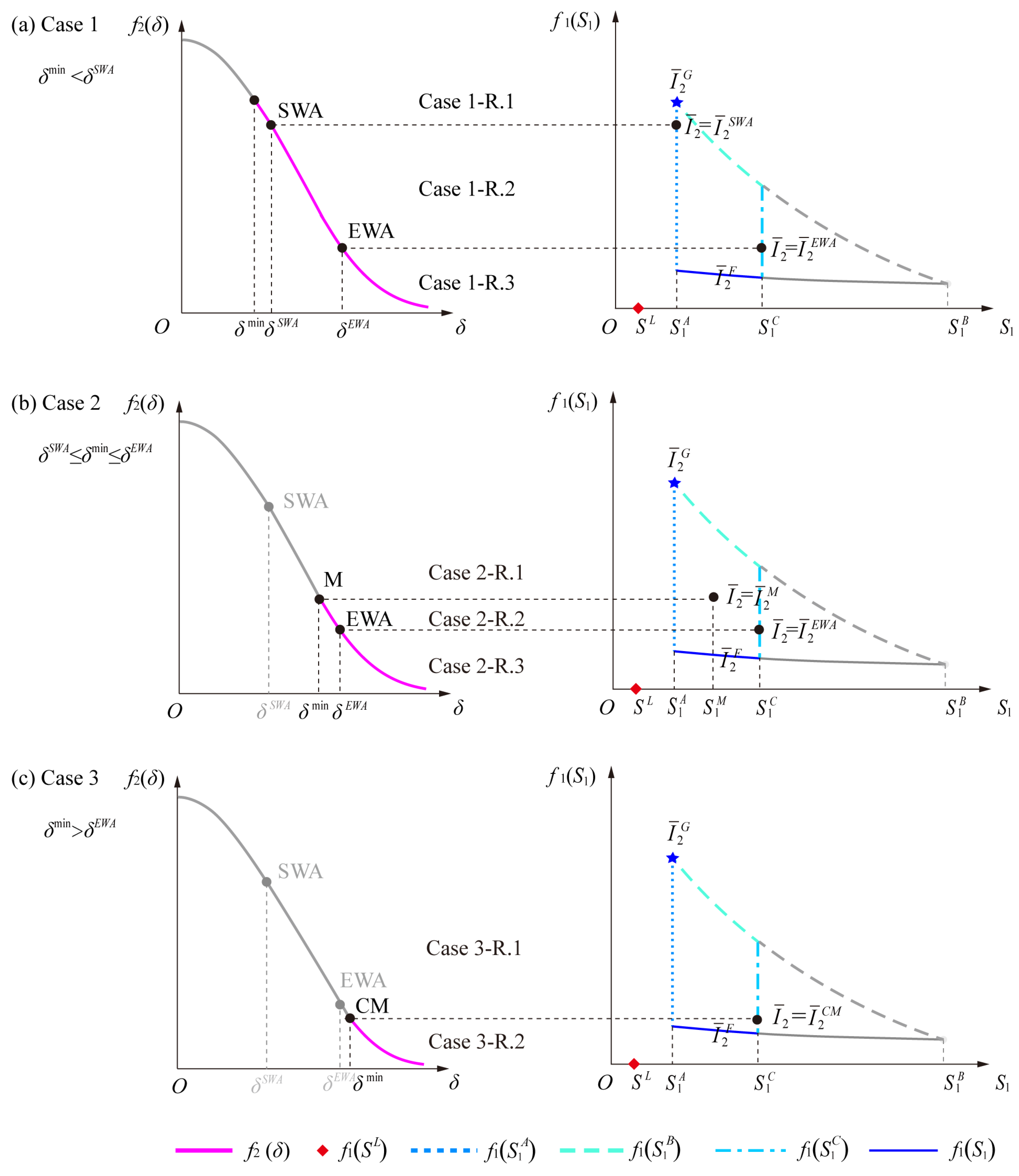
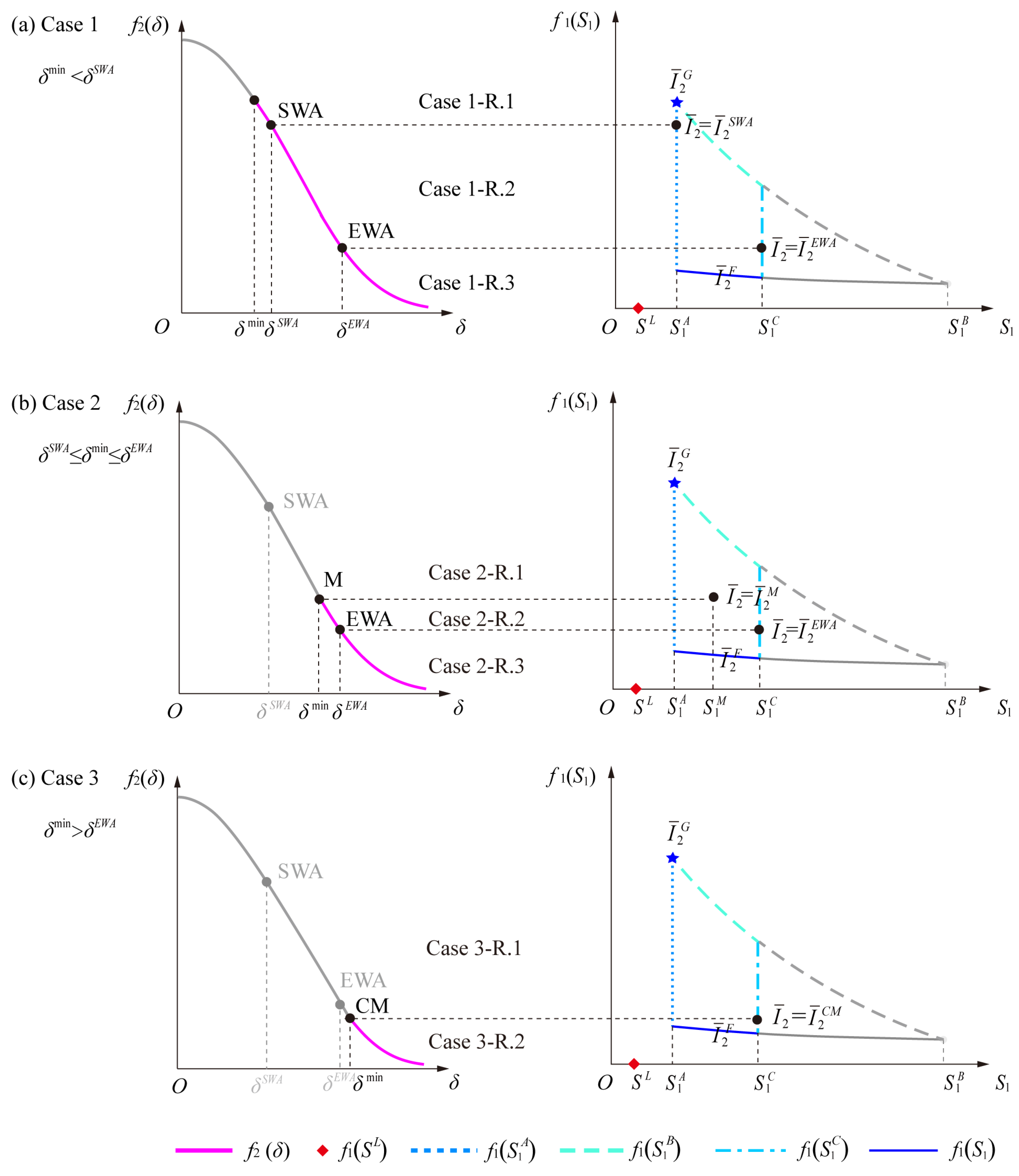
3.3.4. The Optimal Hedging Rules (OHR)
- Case 1: δmin < δSWA
- 2.
- Case 2: δSWA ≤ δmin ≤ δEWA
- 3.
- Case 3: δmin > δEWA
4. Application Results
4.1. Inputs of Model
4.2. Optimal Hedging Rules Experiment
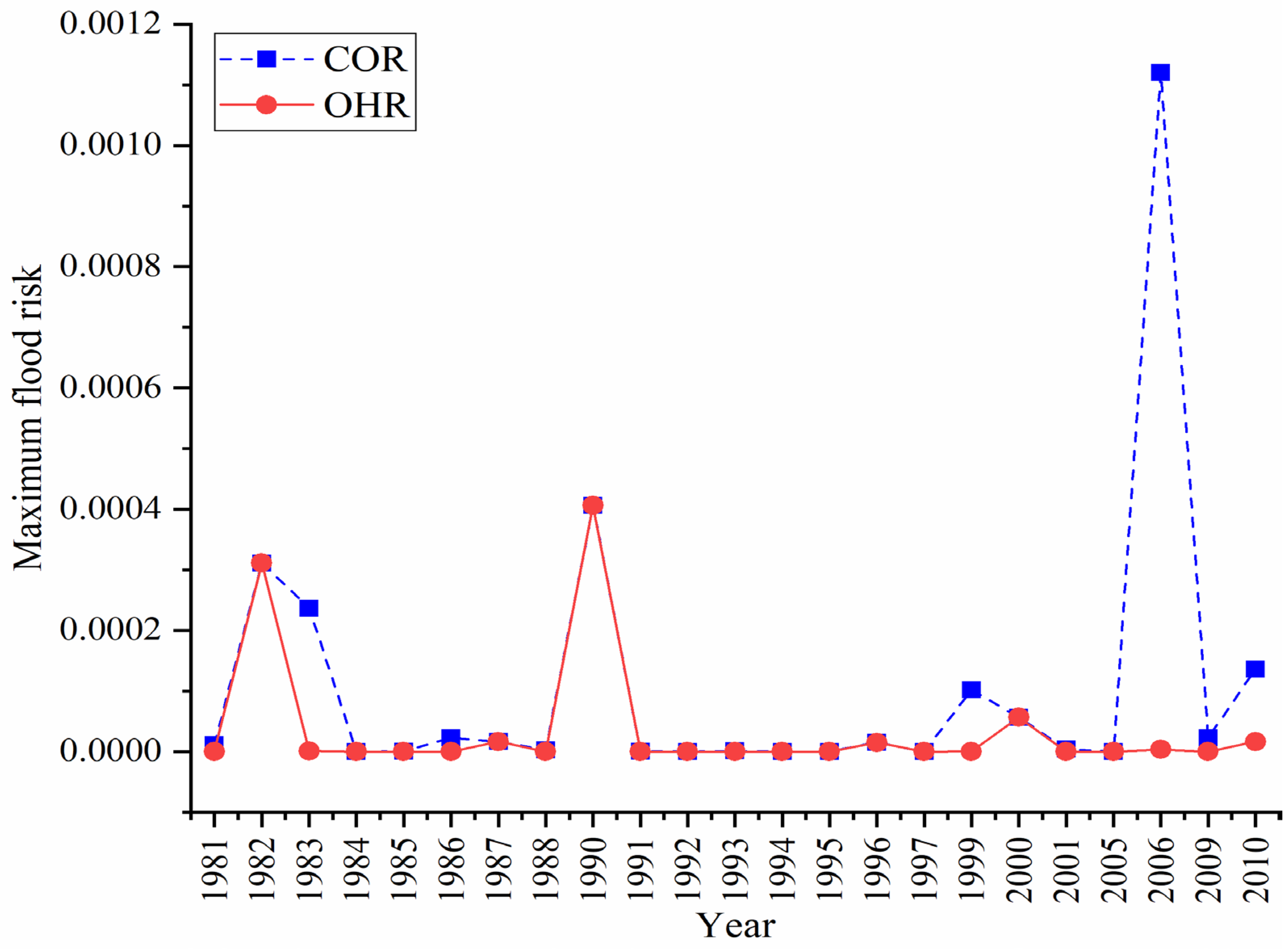
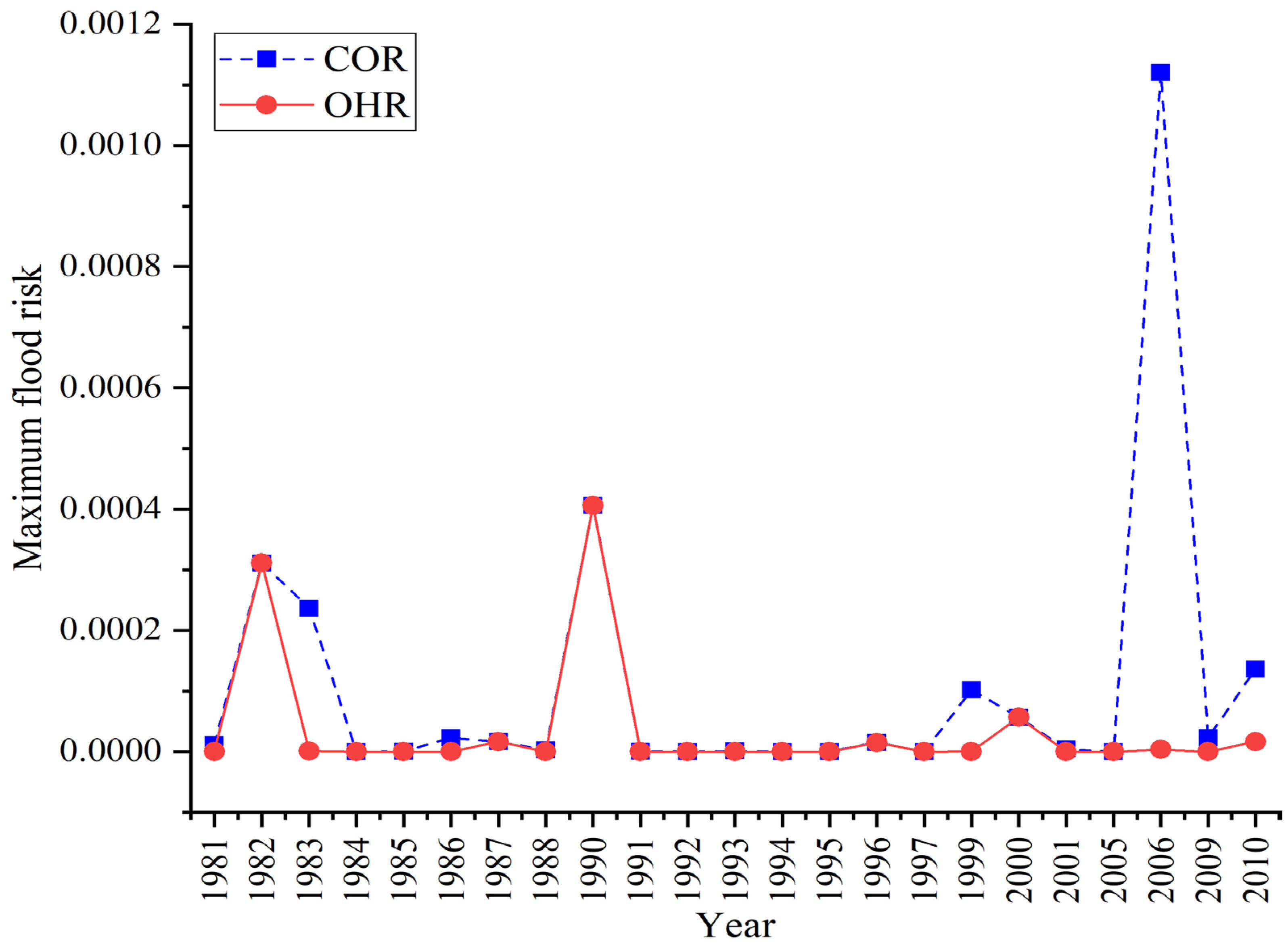
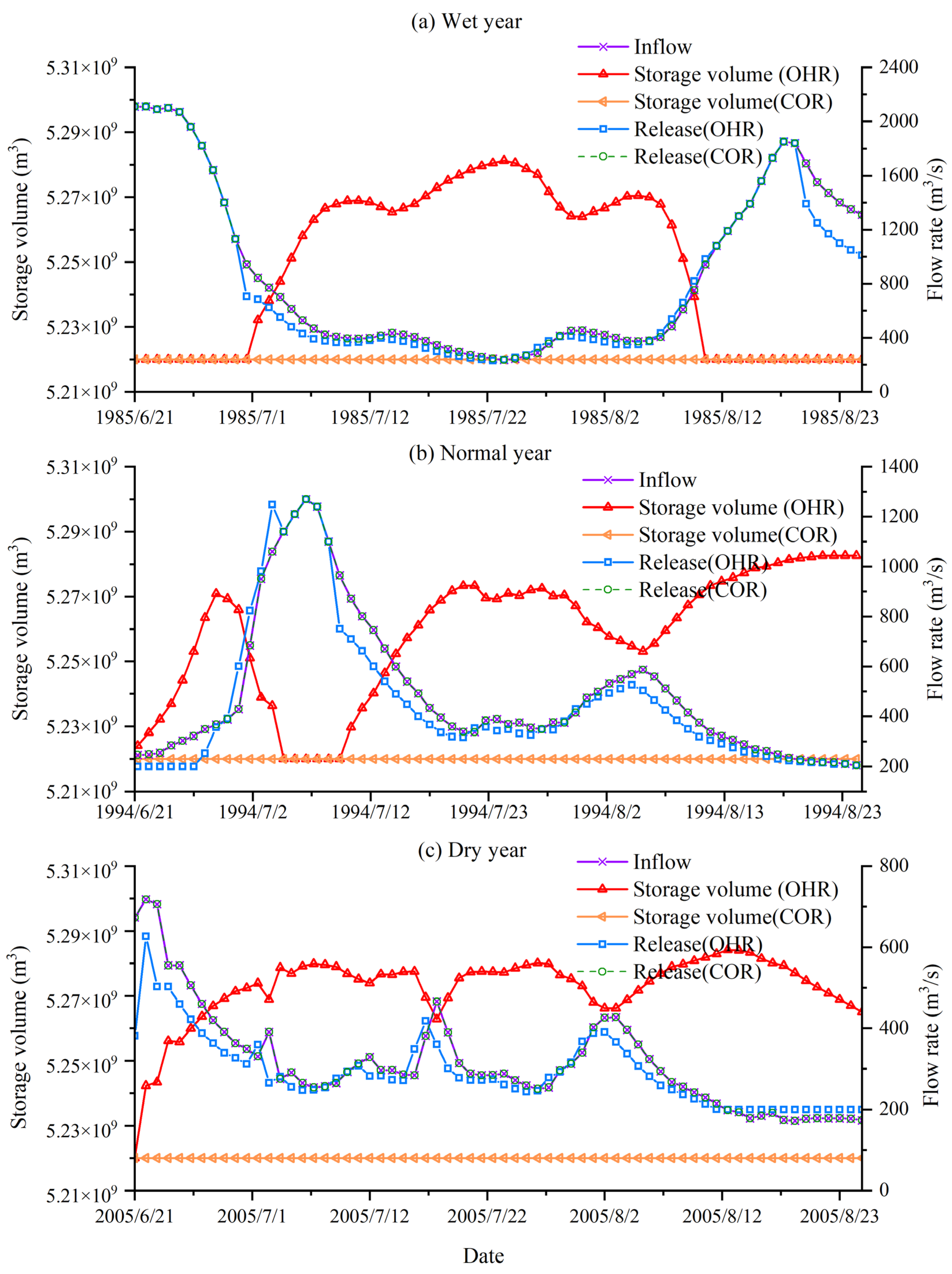
4.3. Comparison with the Current Operation Rules
5. Conclusions
- (1)
- Hedging and trade-offs between power generation and flood risk exist during DCCS only when the forecasted inflow is greater than the minimum downstream water demand and less than the inflow that allows power generation in two stages to reach its peak without spilling.
- (2)
- We identified the forecast uncertainty range that allows for hedging between two objectives by calculating the minimum and maximum forecast uncertainties. If the forecast uncertainty is greater than its maximum, reducing flood risk is the unique objective considered by decision-makers. If the forecast uncertainty is less than its minimum, the carryover storage keeping at its upper bounds meets the current flood control standard.
- (3)
- Compared to forecast uncertainty, downstream risk tolerance plays a more important role in determining which case of the OHR is adopted in real-world operations.
- (4)
- In the real-world application, compared with COR, OHR had an excellent performance in power generation improvement in dry years, indicating that OHR can alleviate the energy crisis during dry years.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| OHR | The optimal hedging rules. |
| DCCS | Dynamic control of carryover storage. |
| FLSV(SL) | Flood-limited storage volume. |
| Δt | One period of two-stage operation. |
| T | Forecast horizon. |
| S0, Sk | Initial storage volume of Stage 1 and storage at the end of Stage k (k = 1, 2). |
| Ik, Rk | Actual inflow and release volume in Stage k (k = 1, 2). |
| , | Forecasted inflow and release volume in Stage 2. |
| ε | Inflow forecasting error in Stage 2. |
| Qthres | The threshold discharge capacity for the downstream safety. |
| δ | Forecasted flood-safety margin. |
| σ | Forecast uncertainty of inflow in Stage 2. |
| Ek | Power generation in stage k (k = 1, 2). |
| SSR(S0), SSR(Sk) | The initial stage-storage relationship water level in Stage 1 and stage-storage relationship at the end of Stage k (k = 1, 2). |
| SDR | Downstream water level. |
| G1, G2 | Power generation and flood risk objectives, respectively. |
| , | Marginal utilities of power generation and flood risk, respectively. |
| ω | The weight is designed for power generation. |
| δmin | Minimum flood-safety margin required for flood risk in Stage 2. |
| Maximum power capacity in Stage k (k = 1, 2). | |
| The lower bound of carryover storage originated from maximum power generation of Stage 1. | |
| The upper bound of carryover storage originated from maximum power generation of Stage 2. | |
| Minimum downstream water demand. | |
| The upper bound of carryover storage originated from downstream water demand of Stage 2. | |
| τr | Risk tolerance. |
| A specific forecasted inflow that triggers the maximum power generation in two stages without spilling when the lower bound of carryover storage is . | |
| A specific forecasted inflow that triggers the maximum power generation in two stages without spilling when the lower bound of carryover storage is SL. | |
| A specific forecasted inflow that triggers the maximum power generation in Stage 2 and downstream water demand constraints at the same time. | |
| The minimum allowable inflow for DCCS application, which is equal to the minimum downstream water demand. | |
| δSWA, | Flood-safety margin and forecasted inflow at the starting hedging point that marginal utility of power generation equals marginal utility of flood risk, i.e., f1() = f2(δSWA). |
| δEWA, | Flood-safety margin and forecasted inflow at the ending hedging point that marginal utility of flood risk equals marginal utility of power generation (), i.e., f1() = f2(δEWA). |
| MUPG(f1(S1)) | Marginal utility of power generation in Stage 1. |
| MUFR (f2(δ)) | Marginal utility of flood risk in Stage 2. |
| σmin, σmax | Minimum and maximum allowed forecast uncertainty for hedging, respectively. |
| dδSWA/dσ | The trend of δSWA as σ increases. |
| dδEWA/dσ | The trend of δEWA as σ increases. |
| d2δSWA/dσ2 | The trend of dδSWA/ dσ as σ increases. |
| d2δEWA/dσ2 | The trend of dδEWA/ dσ as σ increases. |
| Optimal carryover storage from Stage 1 to Stage 2. | |
| δ* | Optimal flood-safety margin in Stage 2. |
| The carryover storage makes the marginal utility of power generation equal minimum marginal utility of flood risk, i.e., f2(δmin) = f1(). | |
| The inflow for situation f2(δmin) = f1(). | |
| The inflow for situation δ = δmin, S1 = . |
Appendix A
Appendix B
- Without considering δmin.
- 2.
- When < < or < < , f2(δ*) is larger than f2(δSWA) that exceeds MUHG, i.e., f2(δ*) > f2(δSWA) = f1() or f2(δ*) > f2(δSWA) = f1(SL), allocating as much space as possible or all of the space above FLSV, which depends on the lower bound of carryover storage, to accommodate the relative larger inflows to reduce flood risk. The optimal conditions of R.1 under different lower bounds of carryover storage can be written as Equations (A6) and (A7):which suggests little or no water storage and the shadow price of the lower bound for carryover storage is positive, i.e., > 0 or > 0.
- 3.
- Case 1
- 4.
- Case 2
- 5.
- Case 3
References
- Panwar, N.L.; Kaushik, S.C.; Kothari, S. Role of renewable energy sources in environmental protection: A review. Renew. Sust. Energ. Rev. 2011, 15, 1513–1524. [Google Scholar] [CrossRef]
- Fallah-Mehdipour, E.; Bozorg Haddad, O.; Mariño, M.A. Real-time operation of reservoir system by genetic programming. Water Resour. Manag. 2012, 26, 4091–4103. [Google Scholar] [CrossRef]
- Gupta, P.; Singh, S.P.; Jangid, A.; Kumar, R. Characterization of black carbon in the ambient air of Agra, India: Seasonal variation and meteorological influence. Adv. Atmos. Sci. 2017, 34, 1082–1094. [Google Scholar] [CrossRef]
- Kuriqi, A.; Pinheiro, A.N.; Sordo-Ward, A.; Bejarano, M.D.; Garrote, L. Ecological impacts of run-of-river hydropower plants—Current status and prospects on the brink of energy transition. Renew. Sustain. Energy Rev. 2021, 142, 110833. [Google Scholar] [CrossRef]
- Oliveira, R.; Loucks, D.P. Operating rules for multireservoir systems. Water Resour. Res. 1997, 33, 839–852. [Google Scholar] [CrossRef]
- Zhao, J.; Cai, X.; Wang, Z. Optimality conditions for a two-stage reservoir operation problem. Water Resour. Res. 2011, 47, W08503. [Google Scholar] [CrossRef]
- Ortiz-Partida, J.P.; Kahil, T.; Ermolieva, T.; Ermoliev, Y.; Lane, B.; Sandoval-Solis, S.; Wada, Y. A two-stage stochastic optimization for robust operation of multipurpose reservoirs. Water Resour. Manag. 2019, 33, 3815–3830. [Google Scholar] [CrossRef] [Green Version]
- Kelman, J.; Damazio, J.M.; Marien, J.L.; Da Costa, J.P. The determination of flood control volumes in a multireservoir system. Water Resour. Res. 1989, 25, 337–344. [Google Scholar] [CrossRef]
- Shah MA, R.; Rahman, A.; Chowdhury, S.H. Challenges for achieving sustainable flood risk management. J. Flood Risk Manag. 2018, 11, S352–S358. [Google Scholar] [CrossRef] [Green Version]
- Yao, H.; Dong, Z.; Jia, W.; Ni, X.; Chen, M.; Zhu, C.; Li, D. Competitive relationship between flood control and power generation with flood season division: A case study in downstream Jinsha River Cascade Reservoirs. Water 2019, 11, 2401. [Google Scholar]
- Mu, J.; Ma, C.; Zhao, J.; Lian, J. Optimal operation rules of Three-gorge and Gezhouba cascade hydropower stations in flood season. Energy Conv. Manag. 2015, 96, 159–174. [Google Scholar] [CrossRef]
- Shang, Y.; Lu, S.; Ye, Y.; Liu, R.; Shang, L.; Liu, C.; Meng, X.; Li, X.; Fan, Q. China’ energy-water nexus: Hydropower generation potential of joint operation of the Three Gorges and Qingjiang cascade reservoirs. Energy 2018, 142, 14–32. [Google Scholar] [CrossRef]
- Xie, A.; Liu, P.; Guo, S.; Zhang, X.; Jiang, H.; Yang, G. Optimal design of seasonal flood limited water levels by jointing operation of the reservoir and floodplains. Water Resour. Manag. 2018, 32, 179–193. [Google Scholar] [CrossRef]
- Chen, J.; Guo, S.; Li, Y.; Liu, P.; Zhou, Y. Joint operation and dynamic control of flood limiting water levels for cascade reservoirs. Water Resour. Manag. 2013, 27, 749–763. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, S.; Liu, P.; Xu, C. Joint operation and dynamic control of flood limiting water levels for mixed cascade reservoir systems. J. Hydrol. 2014, 519, 248–257. [Google Scholar] [CrossRef]
- Li, X.; Guo, S.; Liu, P.; Chen, G. Dynamic control of flood limited water level for reservoir operation by considering inflow uncertainty. J. Hydrol. 2010, 391, 124–132. [Google Scholar] [CrossRef]
- Jiang, Z.; Sun, P.; Ji, C.; Zhou, J. Credibility theory based dynamic control bound optimization for reservoir flood limited water level. J. Hydrol. 2015, 529, 928–939. [Google Scholar] [CrossRef]
- Liu, G.; Qin, H.; Shen, Q.; Tian, R.; Liu, Y. Multi-objective optimal scheduling model of dynamic control of flood limit water level for cascade reservoirs. Water 2019, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Xu, B.; Zhong, P.-A.; Yao, H.; Yue, H.; Zhu, F.; Lu, Q.; Sun, Y.; Mo, R.; Li, Z.; et al. Robust multiobjective reservoir operation and risk decision-making model for real-time flood control coping with forecast uncertainty. J. Hydrol. 2022, 605, 127334. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, P.; Cheng, L.; Chen, G.; Zhou, Y.; Zhang, X.; Xu, W. Determining dynamic water level control boundaries for a multi-reservoir system during flood seasons with considering channel storage. J. Flood Risk Manag. 2020, 13, e12586. [Google Scholar] [CrossRef]
- Chen, L.; Singh, V.P.; Lu, W.; Zhang, J.; Zhou, J.; Guo, S. Streamflow forecast uncertainty evolution and its effect on real-time reservoir operation. J. Hydrol. 2016, 540, 712–726. [Google Scholar] [CrossRef]
- Huang, K.; Ye, L.; Chen, L.; Wang, Q.; Dai, L.; Zhou, J.; Singh, V.P.; Huang, M.; Zhang, J. Risk analysis of flood control reservoir operation considering multiple uncertainties. J. Hydrol. 2018, 565, 672–684. [Google Scholar] [CrossRef]
- Nayak, M.A.; Herman, J.D.; Steinschneider, S. Balancing flood risk and water supply in California: Policy search integrating short-term forecast ensembles with conjunctive use. Water Resour. Res. 2018, 54, 7557–7576. [Google Scholar] [CrossRef]
- Lu, J.; Li, G.; Cheng, C.; Liu, B. A long-term intelligent operation and management model of cascade hydropower stations based on chance constrained programming under multi-market coupling. Environ. Res. Lett. 2021, 16, 055034. [Google Scholar] [CrossRef]
- Ouarda, T.B.; Labadie, J.W. Chance-constrained optimal control for multireservoir system optimization and risk analysis. Stoch. Environ. Res. Risk Assess. 2001, 15, 185–204. [Google Scholar] [CrossRef]
- Simonovic, S. Influence of different downstream users on single multipurpose reservoir operation by chance constraints. Can. J. Civ. Eng. 1988, 15, 596–600. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, C.; Peng, Y.; Zeng, R.; Zhou, H.; Cai, X. An analytical framework for flood water conservation considering forecast uncertainty and acceptable risk. Water Resour. Res. 2015, 51, 4702–4726. [Google Scholar] [CrossRef]
- Draper, A.J.; Lund, J.R. Optimal hedging and carryover storage value. J. Water Resour. Plann. Manag. 2004, 130, 83–87. [Google Scholar] [CrossRef] [Green Version]
- You, J.Y.; Cai, X. Hedging rule for reservoir operations: 1. A theoretical analysis. Water Resour. Res. 2008, 44, W01415. [Google Scholar] [CrossRef]
- You, J.Y.; Cai, X. Hedging rule for reservoir operations: 2. A numerical model. Water Resour. Res. 2008, 44, W01416. [Google Scholar] [CrossRef]
- Zhao, T.; Zhao, J.; Liu, P.; Lei, X. Evaluating the marginal utility principle for long-term hydropower scheduling. Energy Conv. Manag. 2015, 106, 213–223. [Google Scholar] [CrossRef]
- Tan, Q.F.; Wen, X.; Fang, G.H.; Wang, Y.Q.; Qin, G.H.; Li, H.M. Long-term optimal operation of cascade hydropower stations based on the utility function of the carryover potential energy. J. Hydrol. 2020, 580, 124359. [Google Scholar] [CrossRef]
- Li, H.; Liu, P.; Guo, S.; Ming, B.; Cheng, L.; Zhou, Y. Hybrid two-stage stochastic methods using scenario-based forecasts for reservoir refill operations. J. Water Resour. Plann. Manag. 2018, 144, 04018080. [Google Scholar] [CrossRef]
- Wan, W.; Zhao, J.; Lund, J.R.; Zhao, T.; Lei, X.; Wang, H. Optimal hedging rule for reservoir refill. J. Water Resour. Plann. Manag. 2016, 142, 04016051. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, P.; Xu, C.-Y.; Gong, Y.; Cheng, L.; He, S. Real-time reservoir flood control operation for cascade reservoirs using a two-stage flood risk analysis method. J. Hydrol. 2019, 577, 123954. [Google Scholar] [CrossRef]
- Quinn, J.D.; Reed, P.M.; Giuliani, M.; Castelletti, A. Rival framings: A framework for discovering how problem formulation uncertainties shape risk management trade-offs in water resources systems. Water Resour. Res. 2017, 53, 7208–7233. [Google Scholar] [CrossRef]
- Jain, S.K. Investigating the behavior of statistical indices for performance assessment of a reservoir. J. Hydrol. 2010, 391, 90–96. [Google Scholar] [CrossRef]
- Kim, T.H.; Kim, B.; Han, K.Y. Application of fuzzy TOPSIS to flood hazard mapping for levee failure. Water 2019, 11, 592. [Google Scholar] [CrossRef] [Green Version]
- Valipour, M.; Banihabib, M.E.; Behbahani, S.M.R. Comparison of the ARMA, ARIMA, and the autoregressive artificial neural network models in forecasting the monthly inflow of Dez dam reservoir. J. Hydrol. 2013, 476, 433–441. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.I.; Wilhelmi, J.R. Assessment of the economic impact of environmental constraints on short-term hydropower plant operation. Energy Policy 2010, 38, 7960–7970. [Google Scholar] [CrossRef]
- Georgakakos, K.P.; Graham, N.E. Potential benefits of seasonal inflow prediction uncertainty for reservoir release decisions. J. Appl. Meteorol. Climatol. 2008, 47, 1297–1321. [Google Scholar] [CrossRef]
- Jane, J.Y. Necessary and sufficient optimality conditions for mathematical programs with equilibrium constraints. J. Math. Anal. Appl. 2005, 307, 350–369. [Google Scholar]
- Kyparisis, J. On uniqueness of Kuhn-Tucker multipliers in nonlinear programming. Math. Program. 1985, 32, 242–246. [Google Scholar] [CrossRef]
- Herskovits, J. Feasible direction interior-point technique for nonlinear optimization. J. Optim. Theory Appl. 1998, 99, 121–146. [Google Scholar] [CrossRef]
- Zeng, X.; Lund, J.R.; Cai, X. Linear Versus Nonlinear (Convex and Concave) Hedging Rules for Reservoir Optimization Operation. Water Resour. Res. 2021, 57, e2020WR029160. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | The Forecasted Inflow in Stage 2 for DCCS | The Optimal Solutions |
|---|---|---|
| Case 1: δmin < δSWA | R.1: < ≤ or < ≤ . | Little water or no water is stored, and carryover storage is kept at the lower bound of DCCS ( = or = SL). |
| R.2: < ≤ . | Hydropower generation and flood risk are balanced (f1() = f2(δ*)). | |
| R.3: < ≤ . | Carryover storage volume remains at the upper bound of DCCS ( = ). | |
| Case 2: δSWA ≤ δmin ≤ δEWA | R.1: < ≤ or < ≤ . | After meeting δmin, the inflow from Stage 1 is carried over to Stage 2 ( = Qthres + SL − − δmin). |
| R.2: < ≤ . | The optimal solutions are the same as in Case 1-R.2. | |
| R.3: < ≤ . | The optimal solutions are the same as in Case 1-R.3. | |
| Case 3: δmin > δEWA | R.1: < ≤ or < ≤ . | The optimal solutions are the same as in Case 2-R.1. |
| R.2: < ≤ . | The optimal solutions are the same as in Case 1-R.3. |
| Cases | Range of τr σ = 2.368 × 107 | Range of σ (×107) | ||
|---|---|---|---|---|
| τr = 5 × 10−3 | τr = 4.50 × 10−6 | τr = 7.93 × 10−7 | ||
| Case 1: δmin < δSWA | (5.410 × 10−6, 0.500) | [2.309, 5.450] | -- | -- |
| Case 2: δSWA ≤ δmin ≤δEWA | [3.730 × 10−6, 5.410 × 10−6] | -- | [2.309, 3.456], [3.974, 5.450] | -- |
| Case 3: δmin > δEWA | (0.000, 5.410 × 10−6) | -- | (3.456, 3.974) | [2.309, 5.450] |
| Methods | Annual Average | Flood Season | Non-Flood Season | Wet Year | Normal Year | Dry Year |
|---|---|---|---|---|---|---|
| COR | 6.36 | 3.23 | 3.13 | 7.93 | 6.57 | 4.63 |
| OHR | 6.62 | 3.34 | 3.28 | 8.15 | 6.74 | 4.99 |
| Change | 0.26 | 0.11 | 0.15 | 0.22 | 0.17 | 0.33 |
| Rate | 4.09% | 4.02% | 4.79% | 2.77% | 2.59% | 7.13% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Lund, J.R.; Ding, W.; Zhang, X.; Jin, S.; Wang, G.; Peng, Y. An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk. Water 2022, 14, 3841. https://doi.org/10.3390/w14233841
Zhang L, Lund JR, Ding W, Zhang X, Jin S, Wang G, Peng Y. An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk. Water. 2022; 14(23):3841. https://doi.org/10.3390/w14233841
Chicago/Turabian StyleZhang, Lin, Jay R. Lund, Wei Ding, Xiaoli Zhang, Sifan Jin, Guoli Wang, and Yong Peng. 2022. "An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk" Water 14, no. 23: 3841. https://doi.org/10.3390/w14233841