
Tsunami-like Flow-Induced Forces on the Landward Structure behind a Vertical Seawall with and without Recurve Using OpenFOAM





Abstract
:
1. Introduction
2. Numerical Simulation
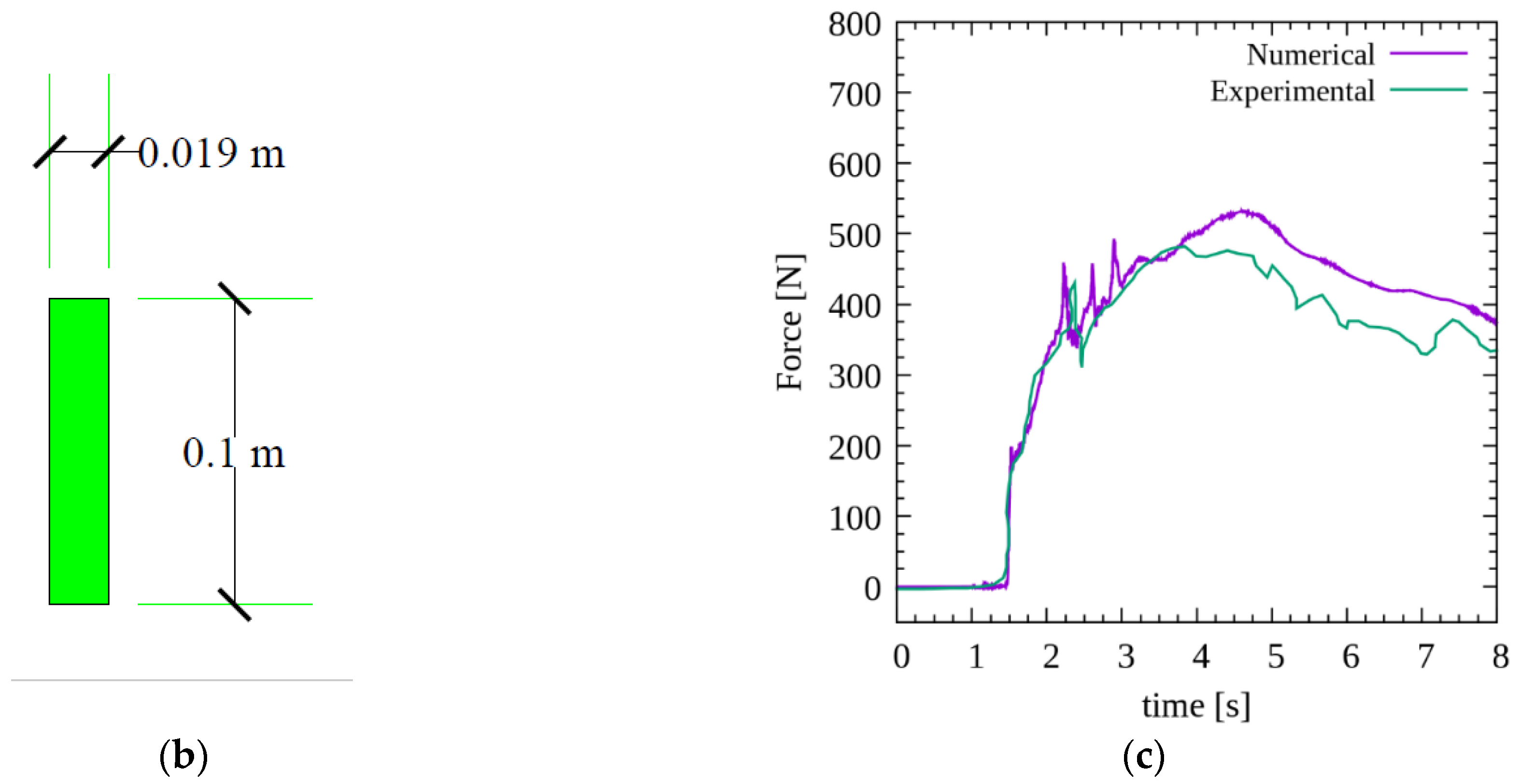
2.1. Validation Domain
2.2. Computational Domain
2.3. Parametric Study
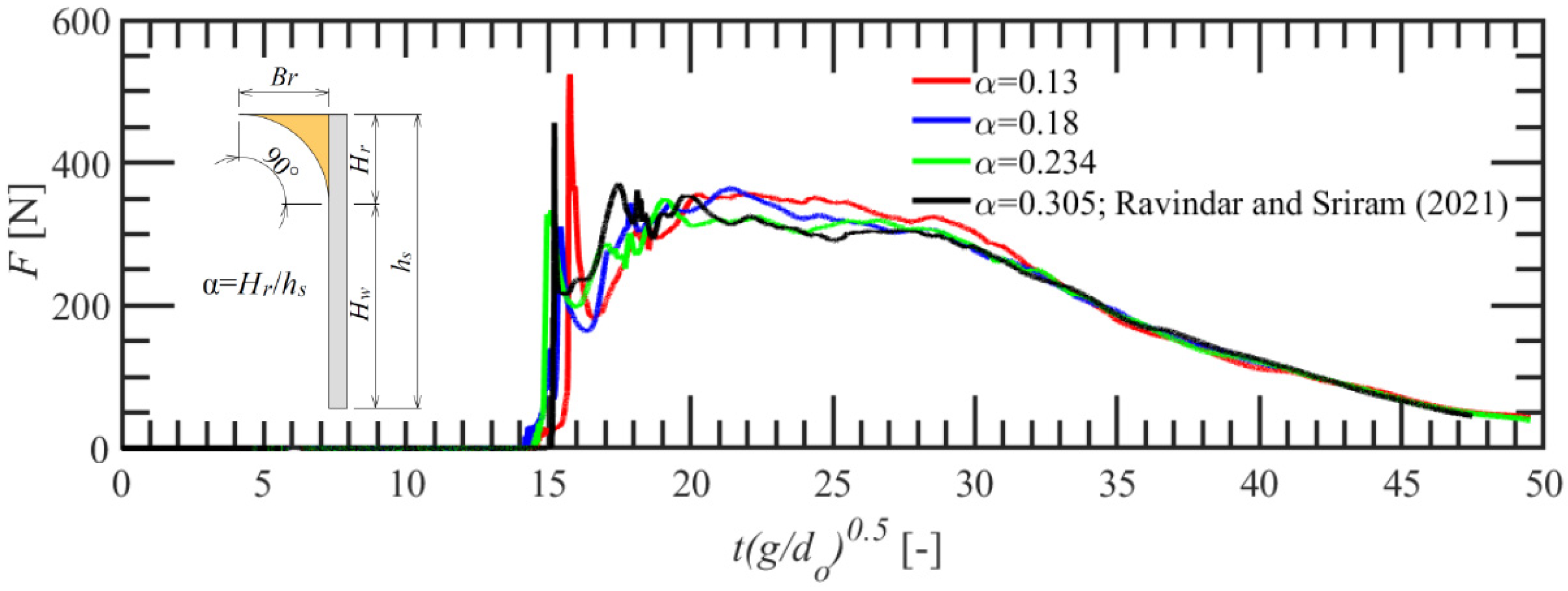
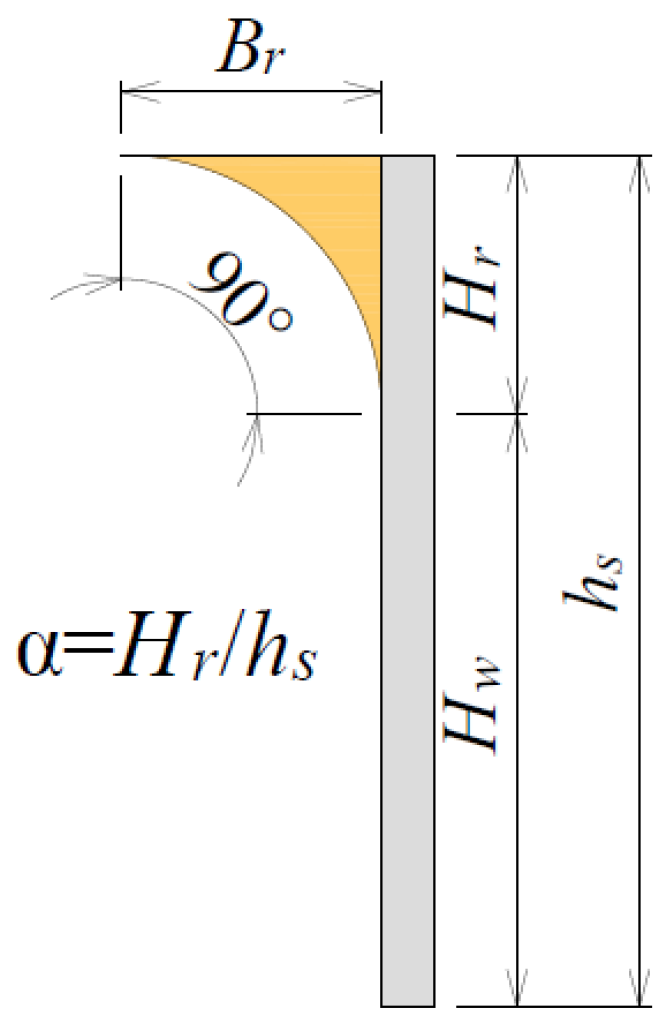
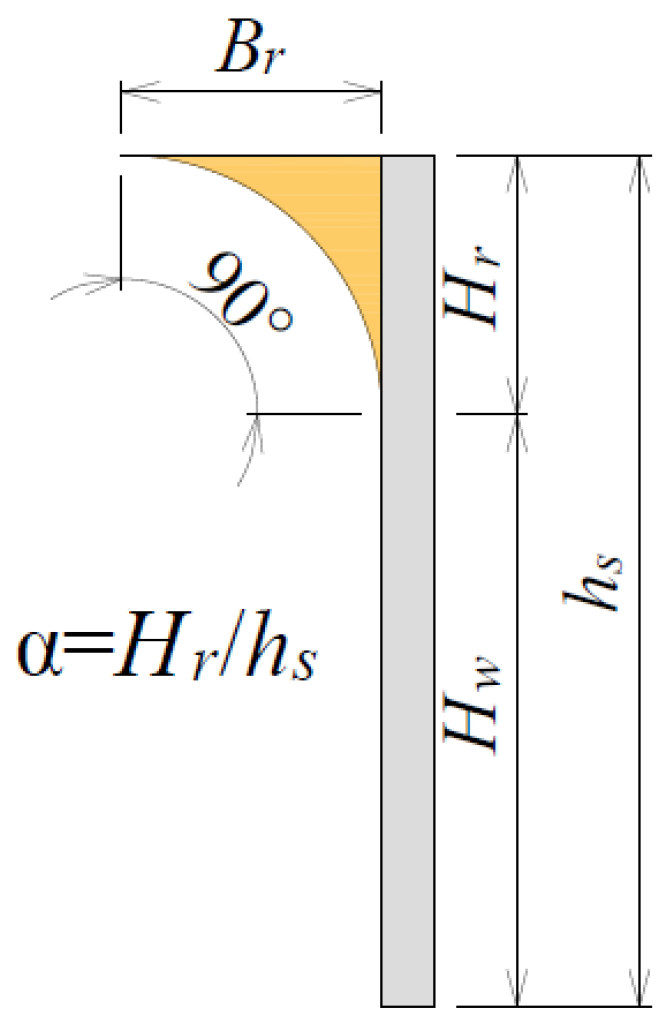
Recurve Wall
3. Results and Discussions
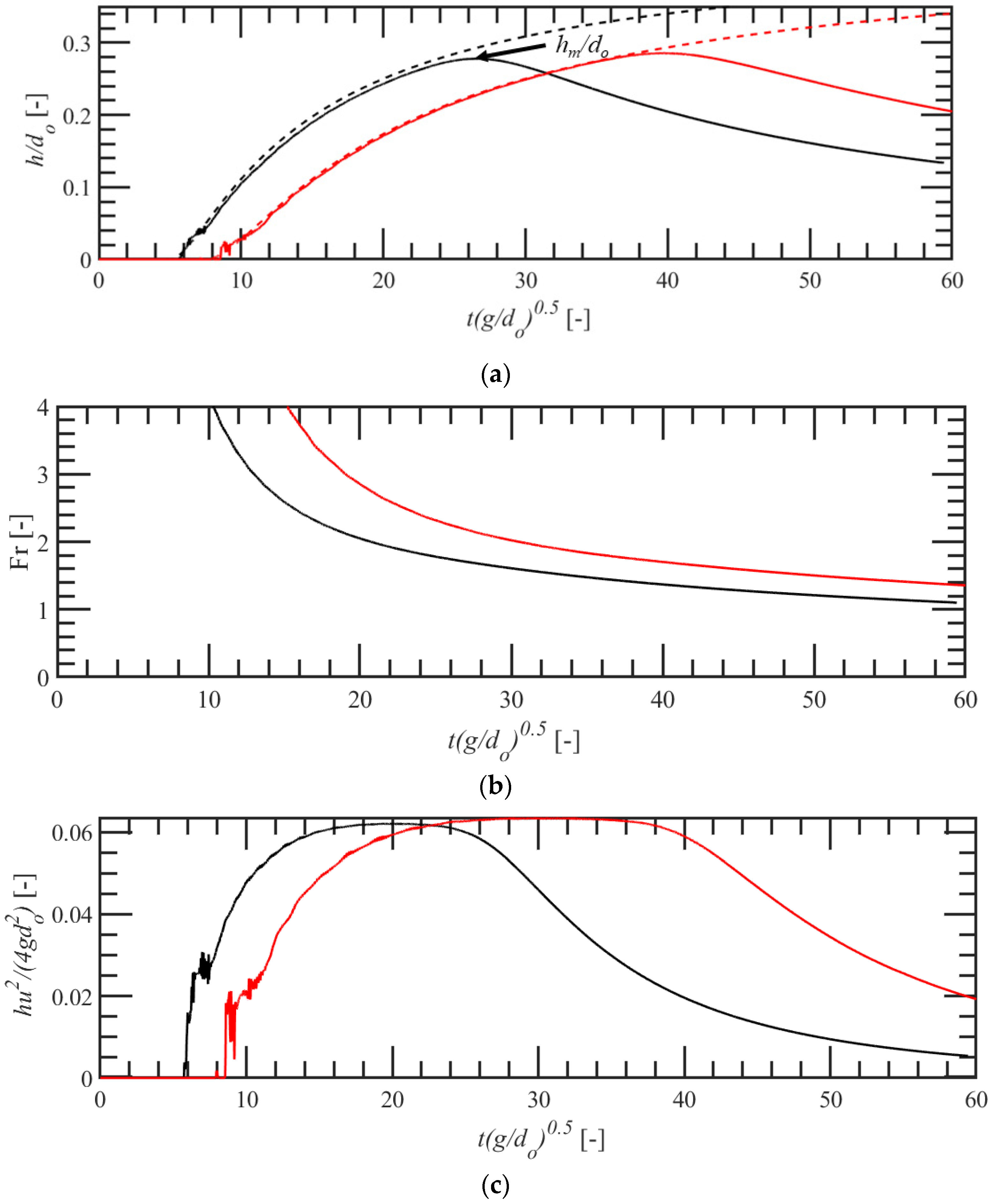
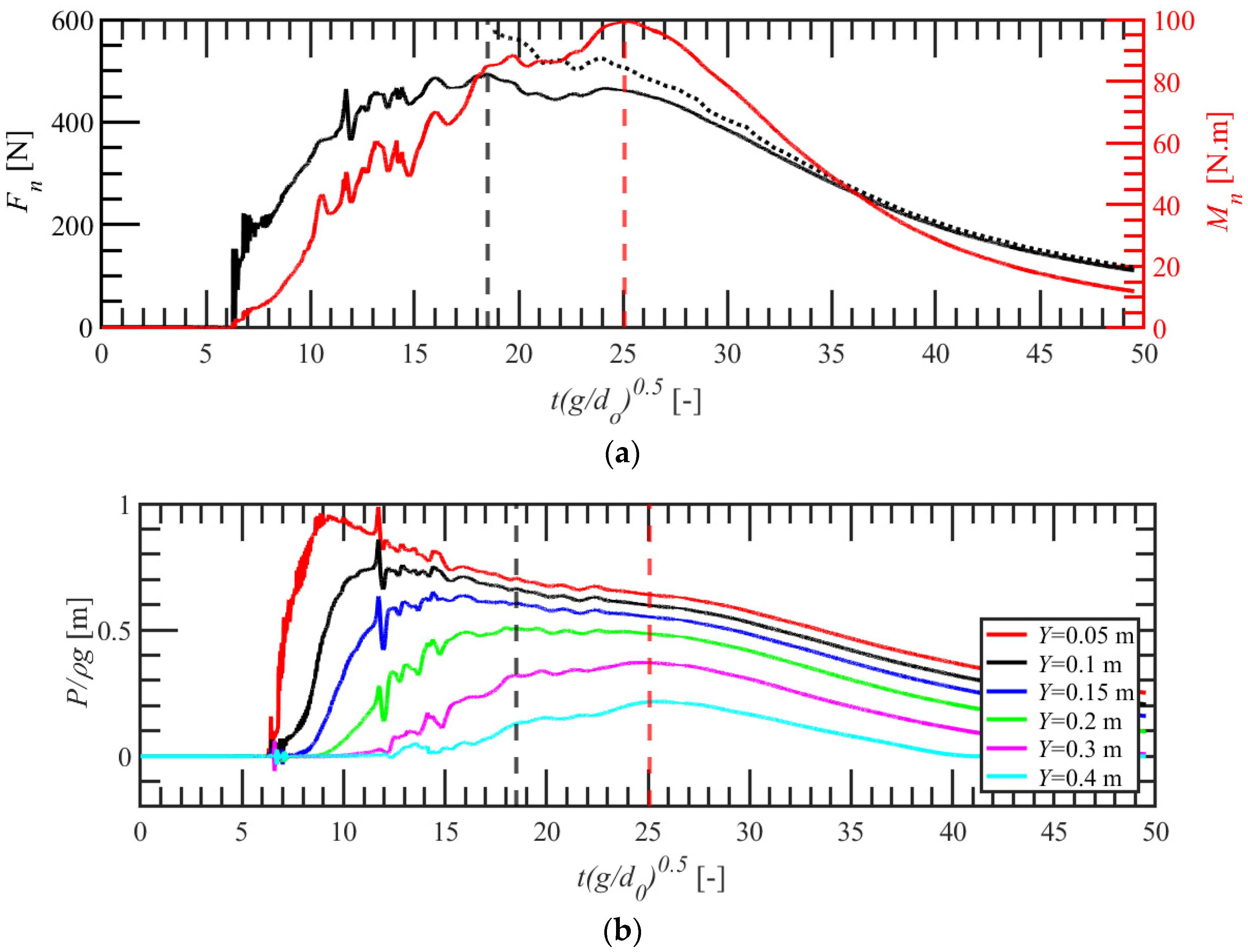
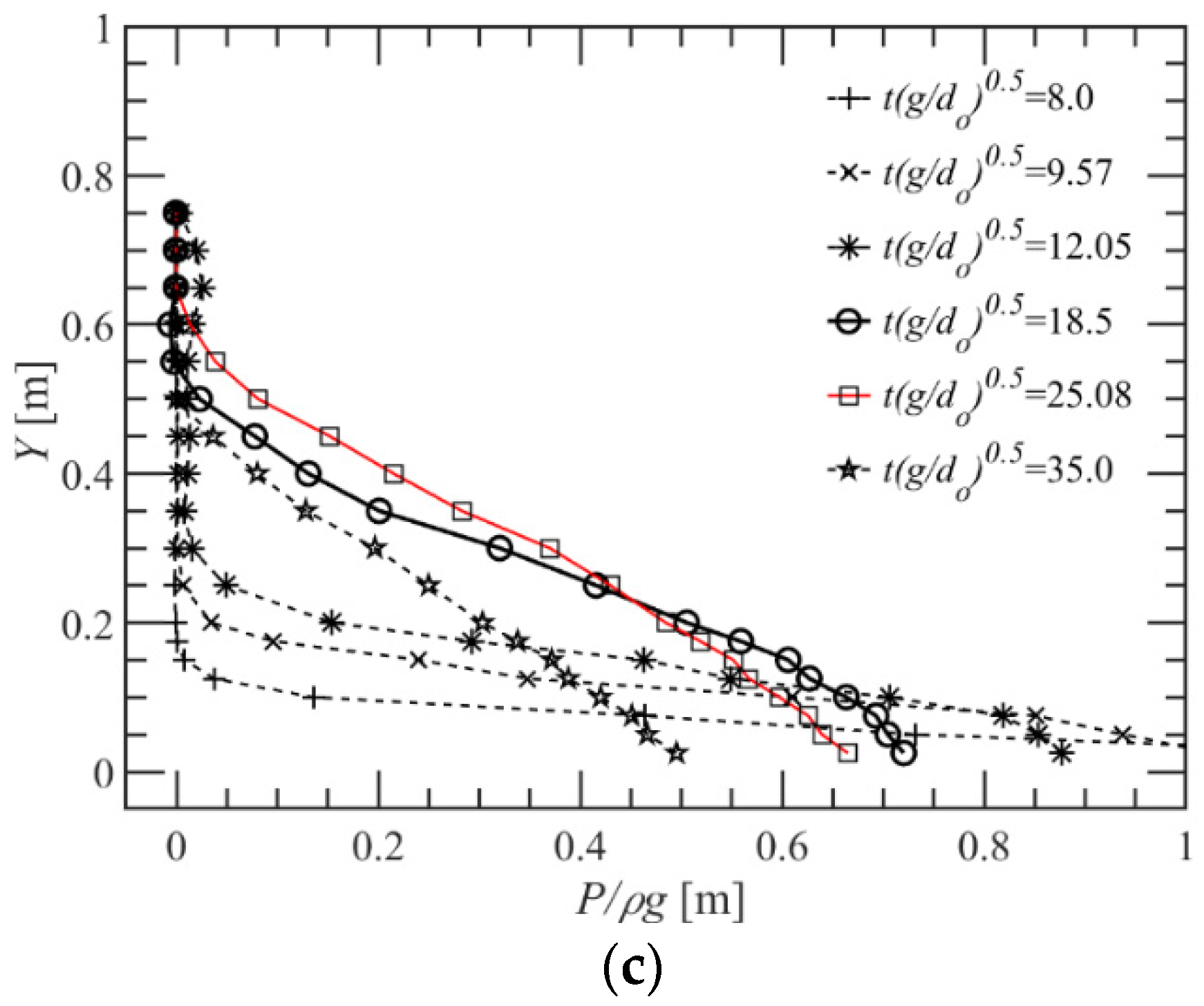
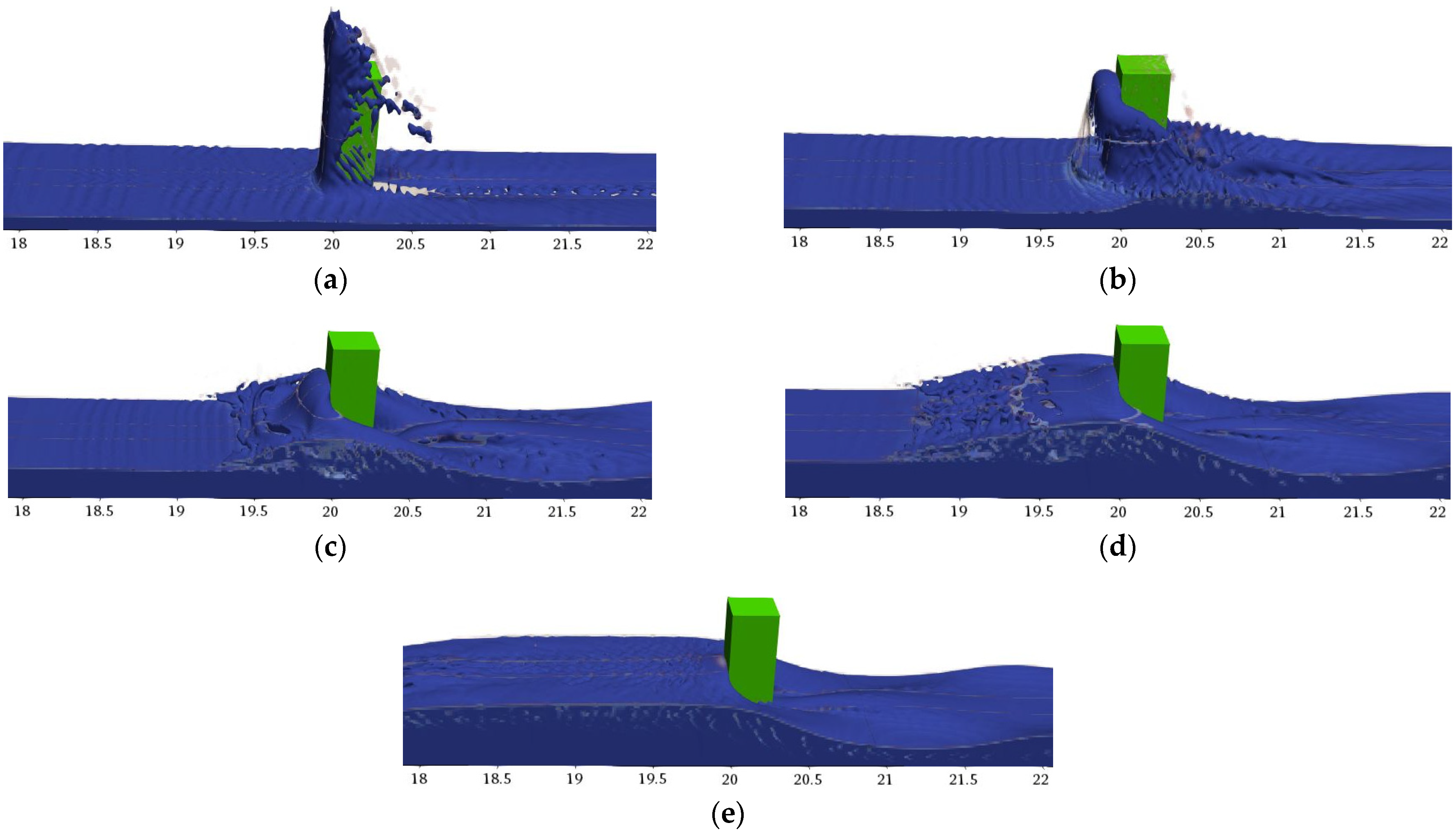
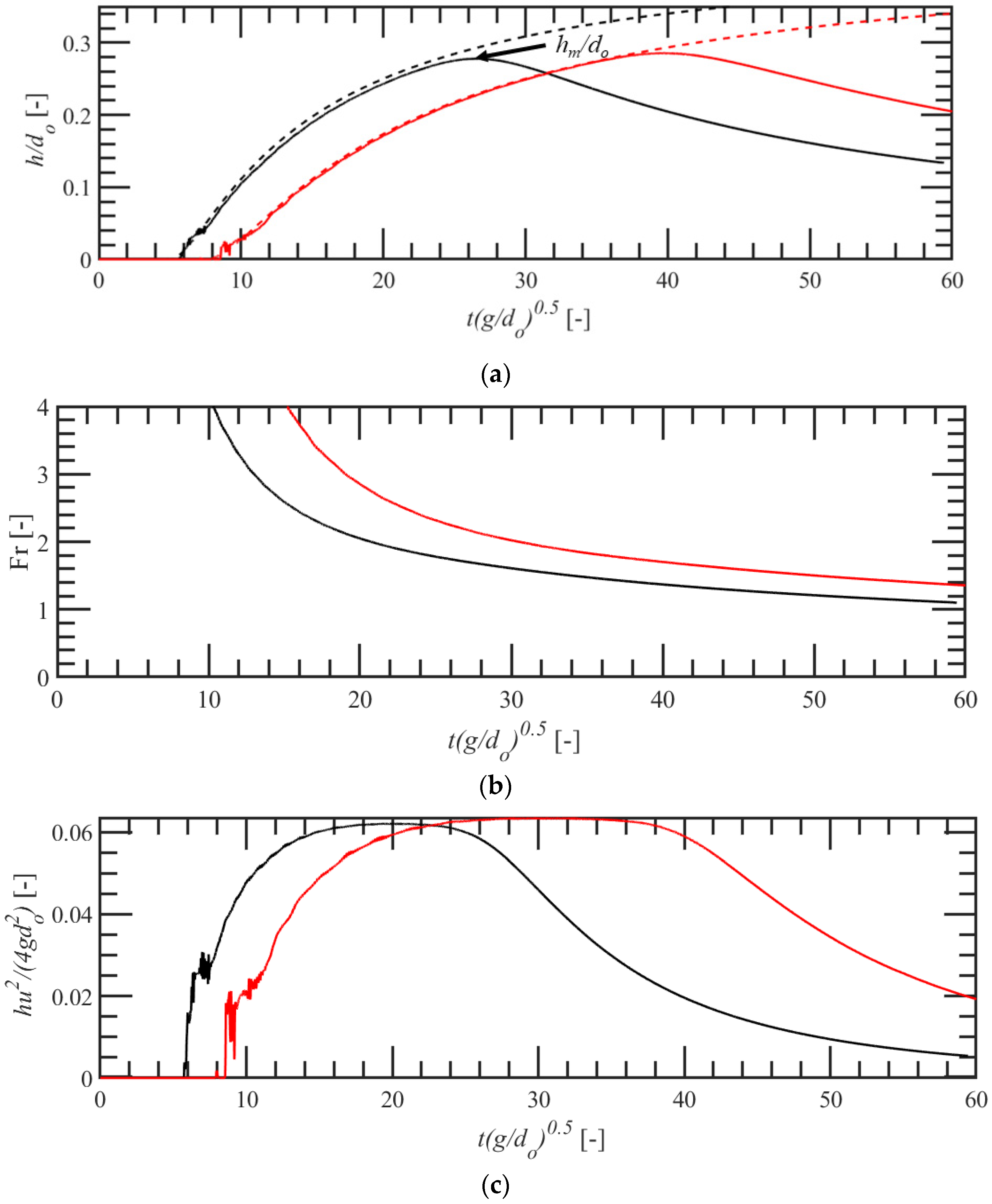
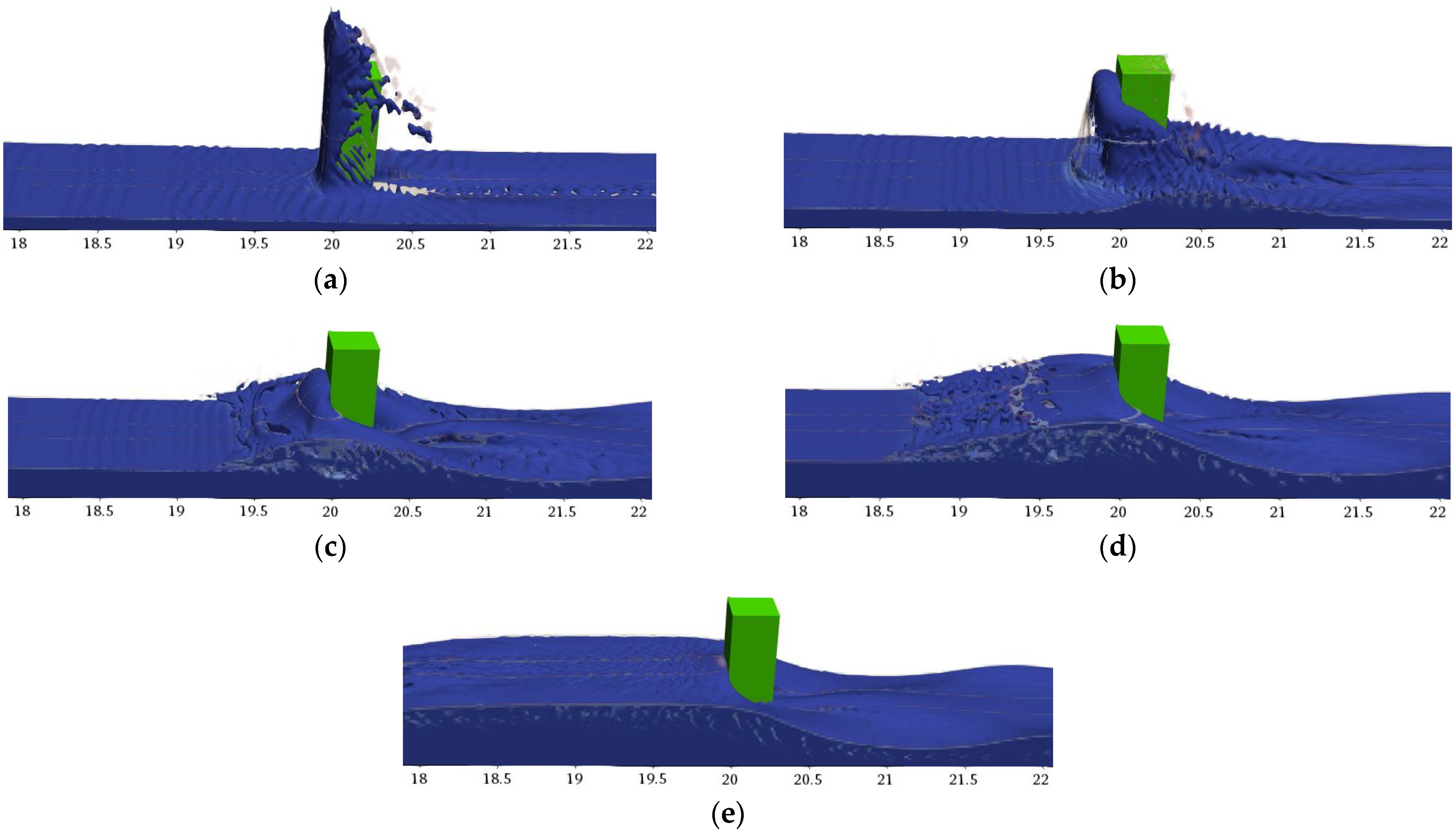
3.1. Free Flow Hydrodynamics
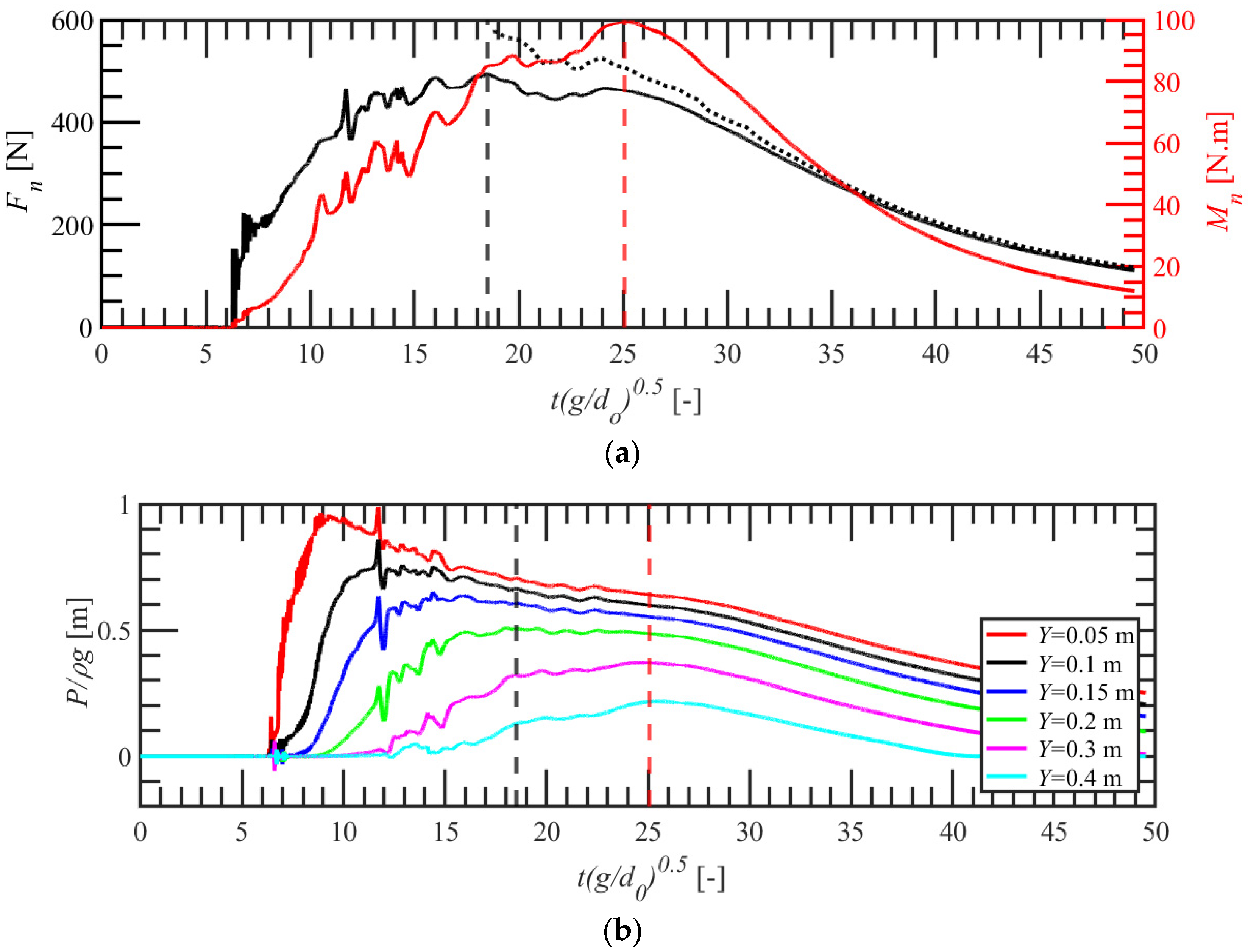
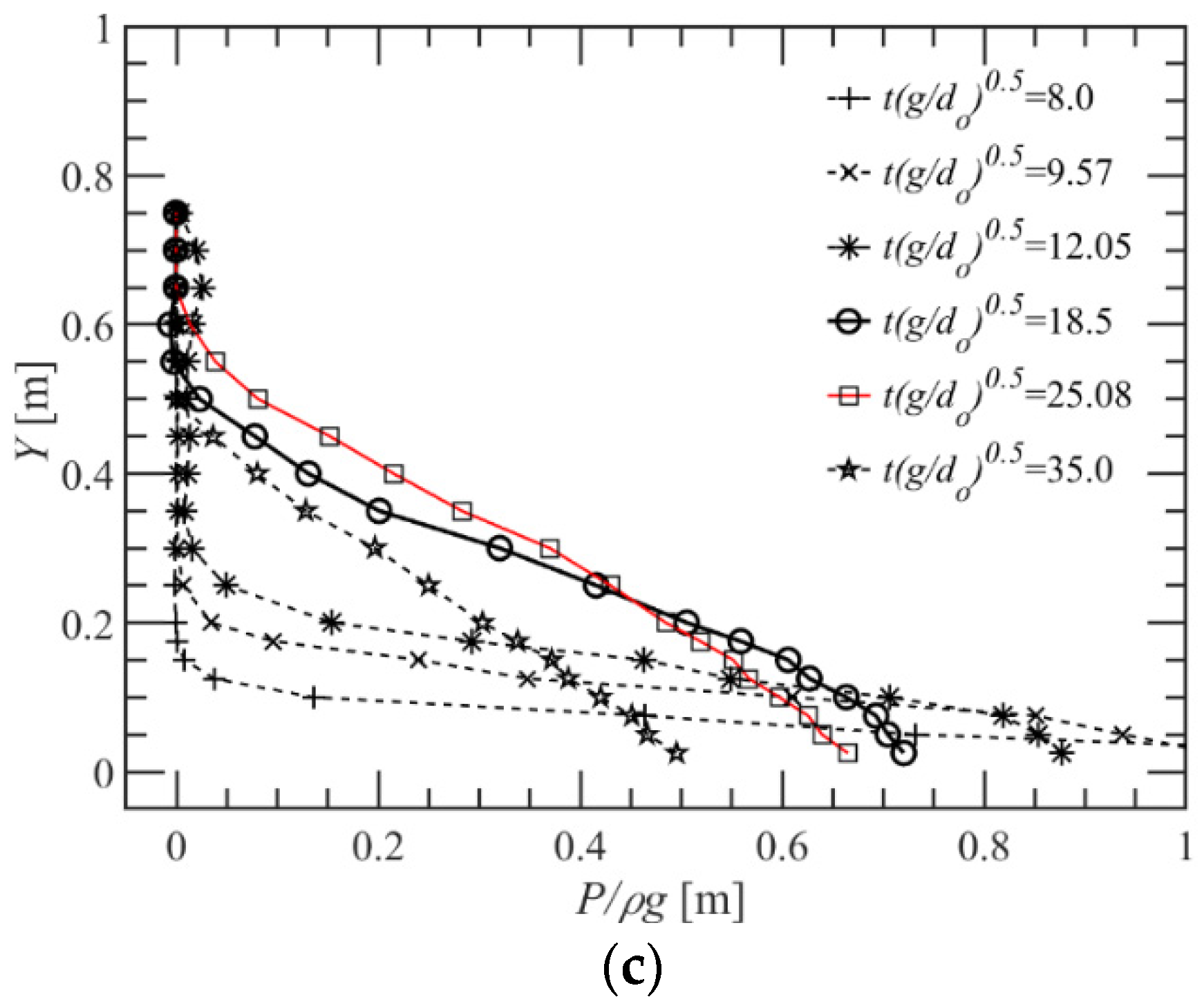
3.2. Without Mitigation Wall (hs = 0 m)
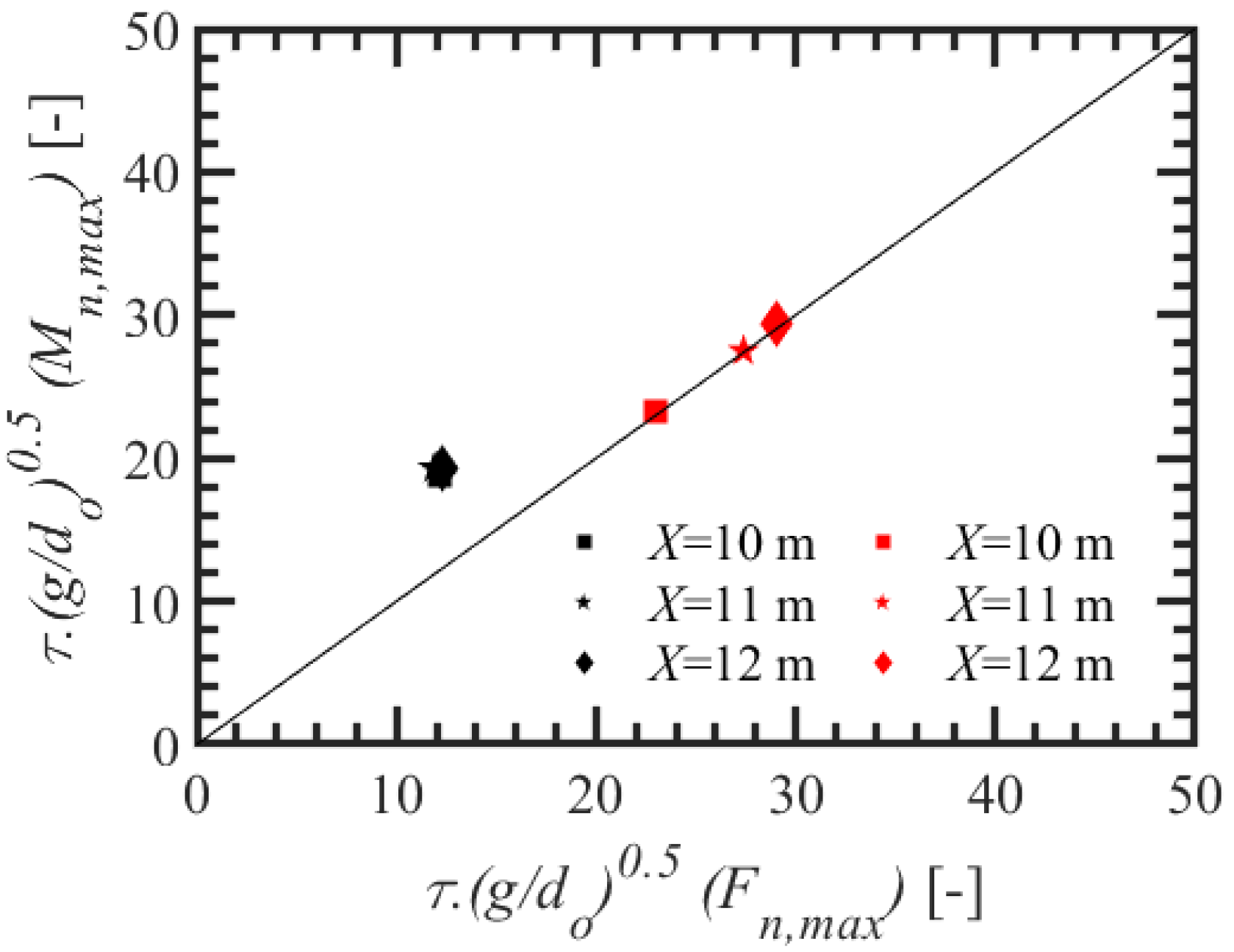
Fn,max and Mn,max Theoretical Estimation
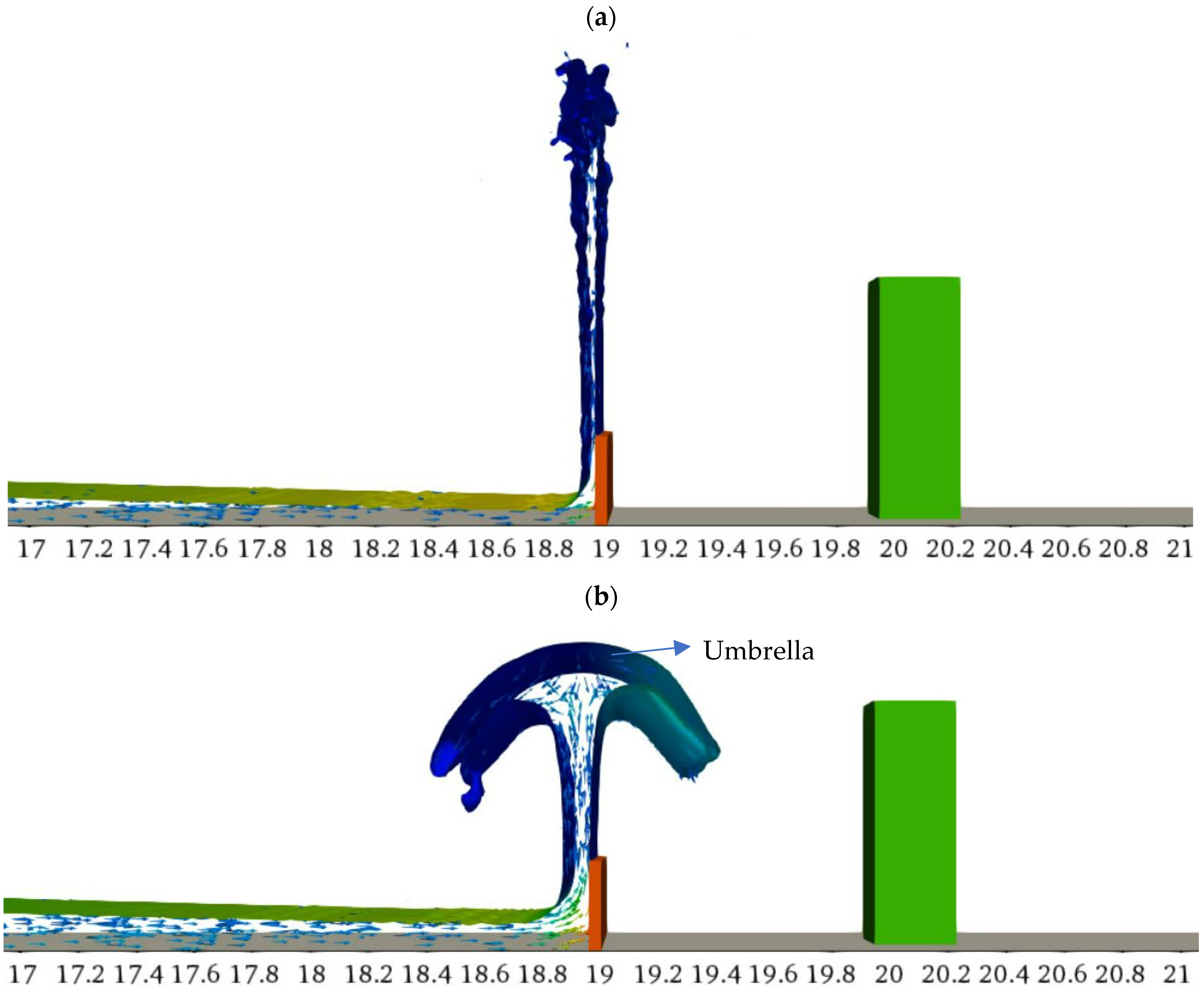
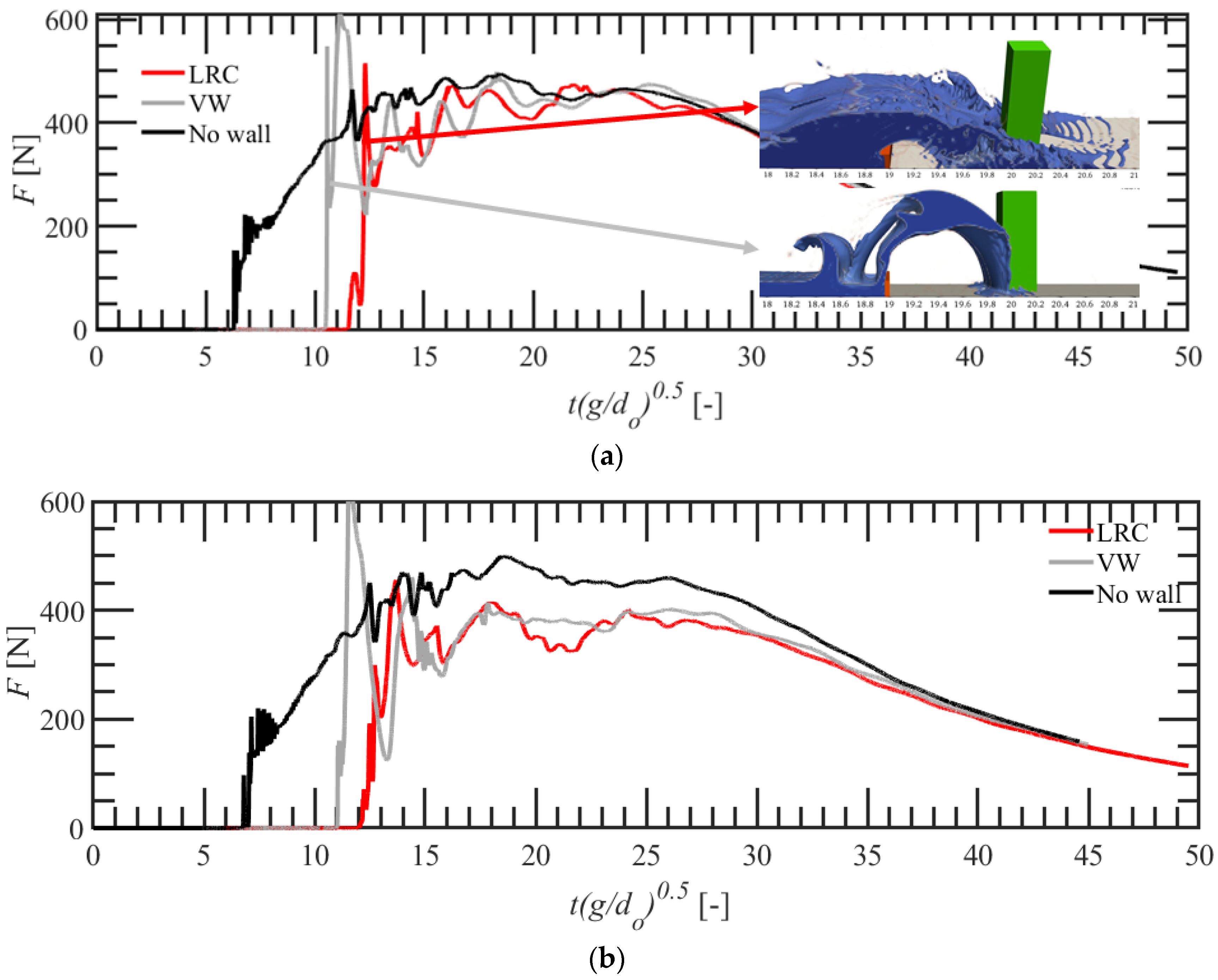
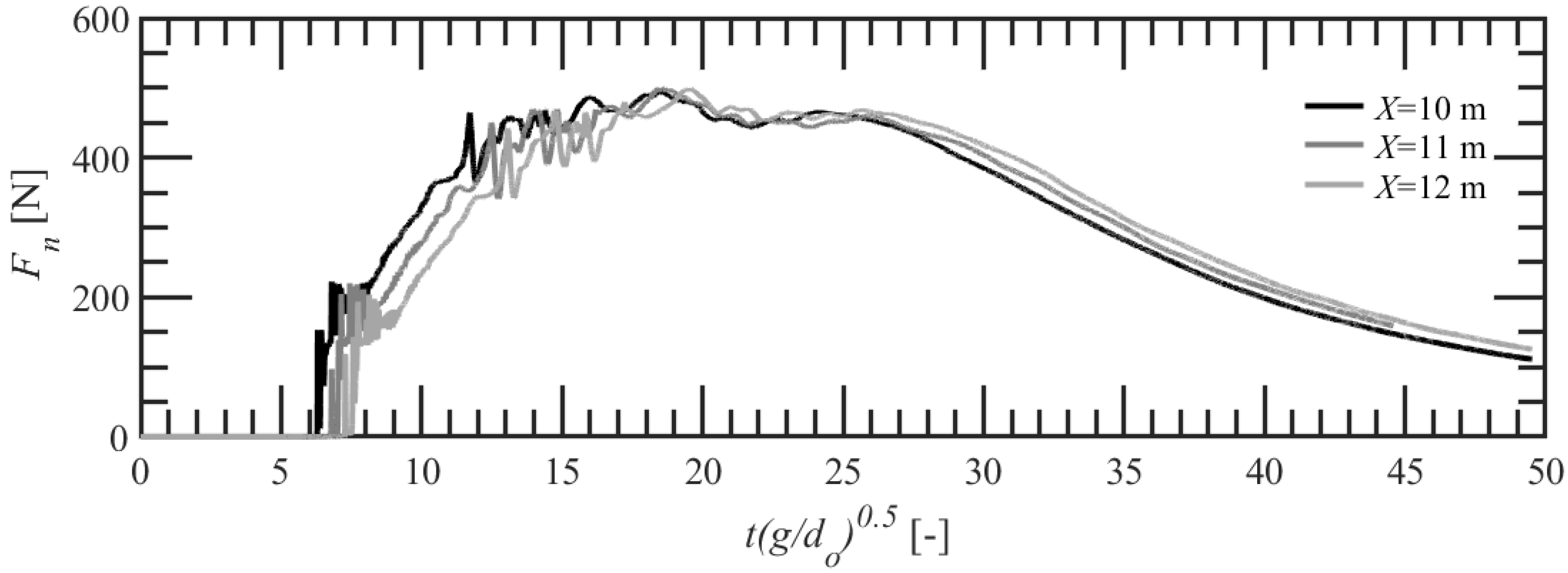
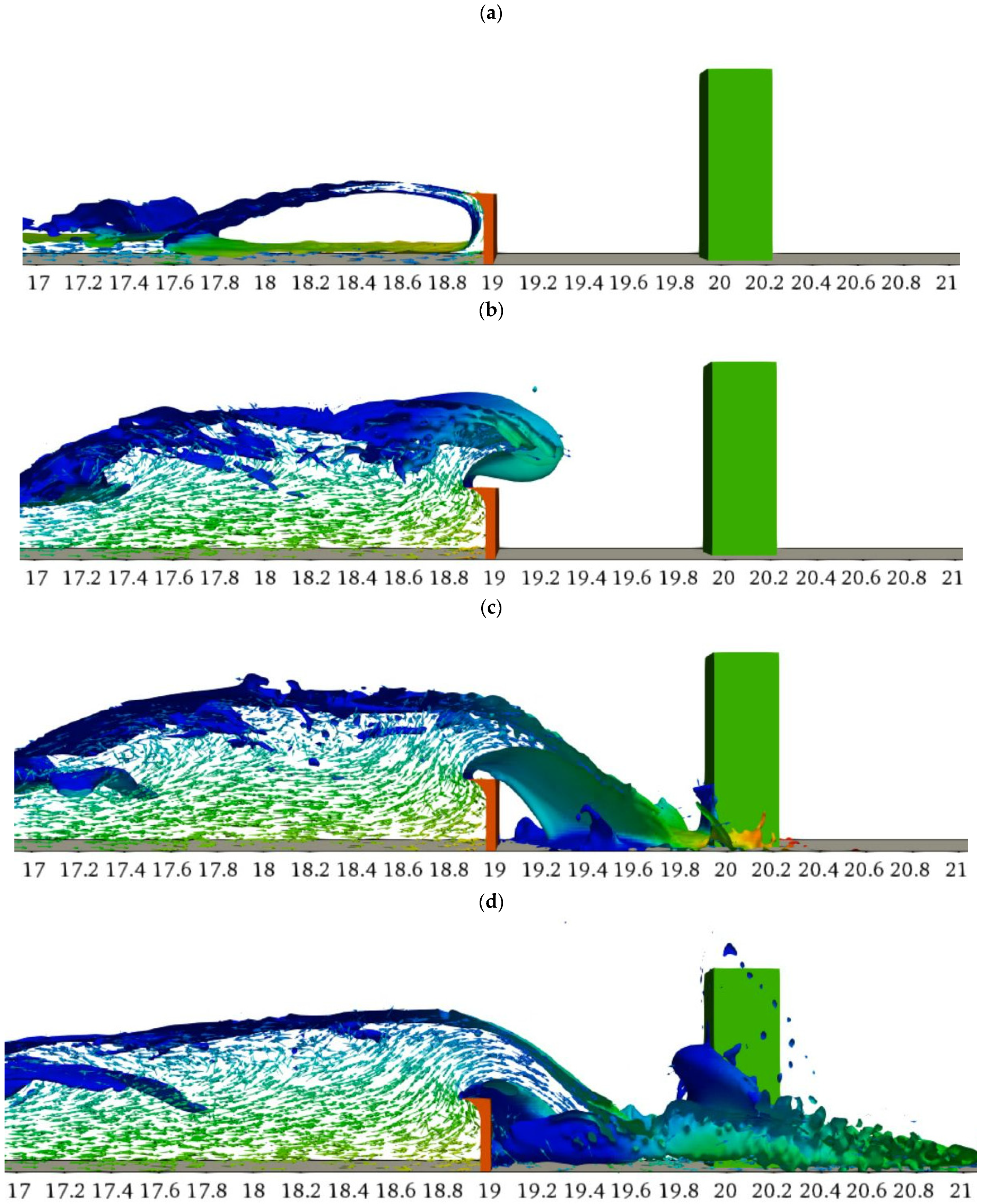
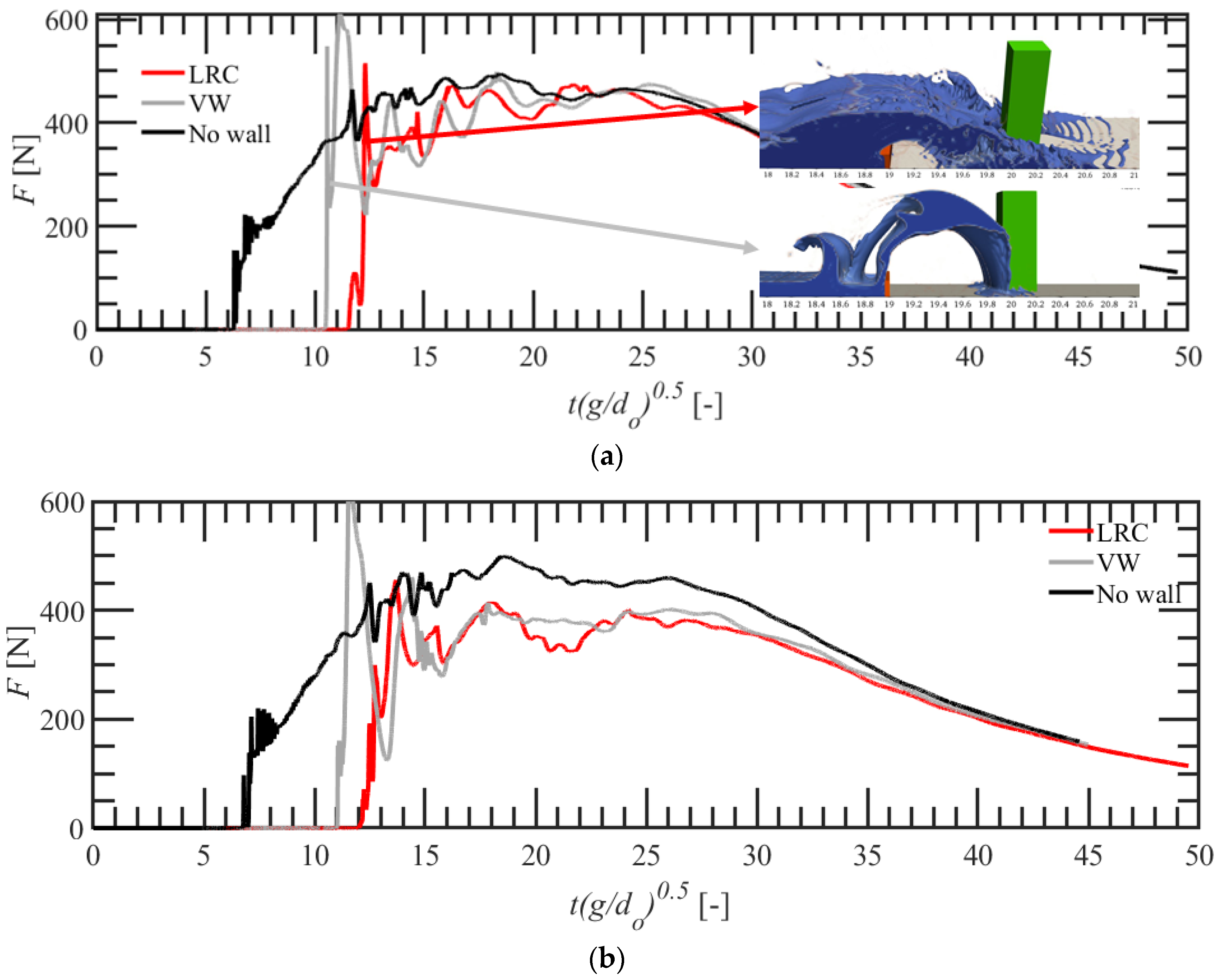
3.3. Flow Overtopping and Force Characteristics
3.4. Force Reduction Due to Mitigation Wall
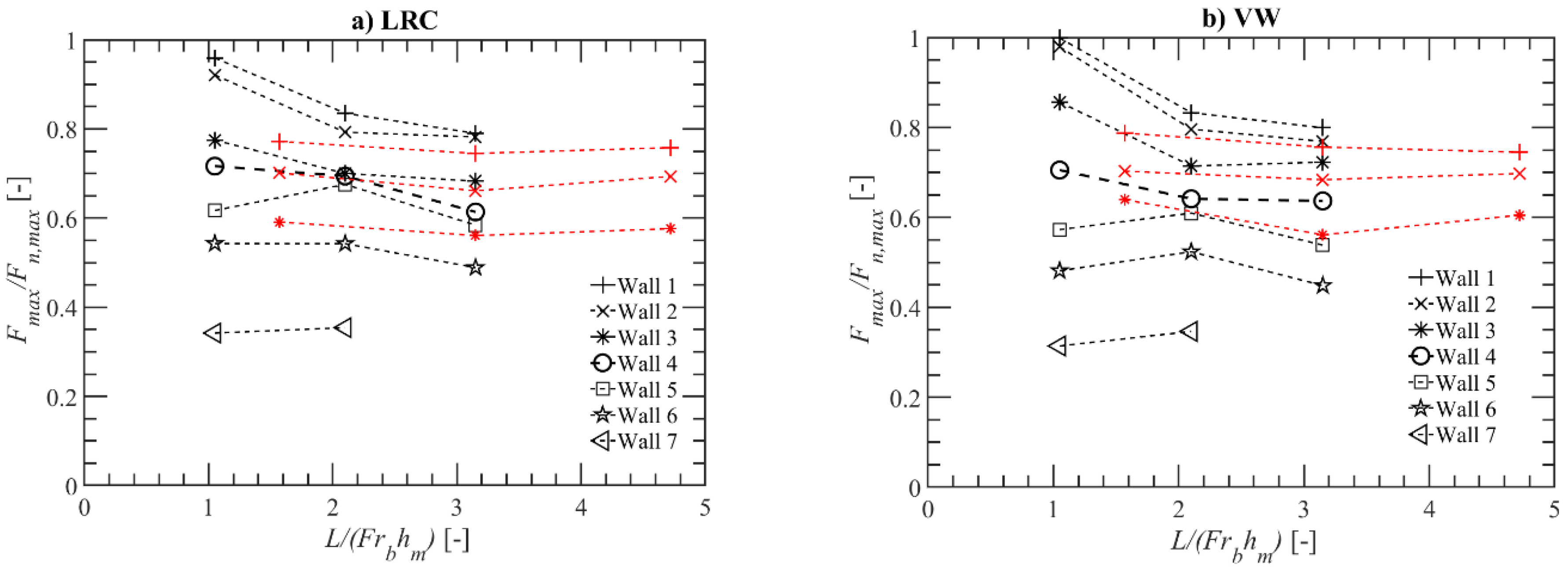
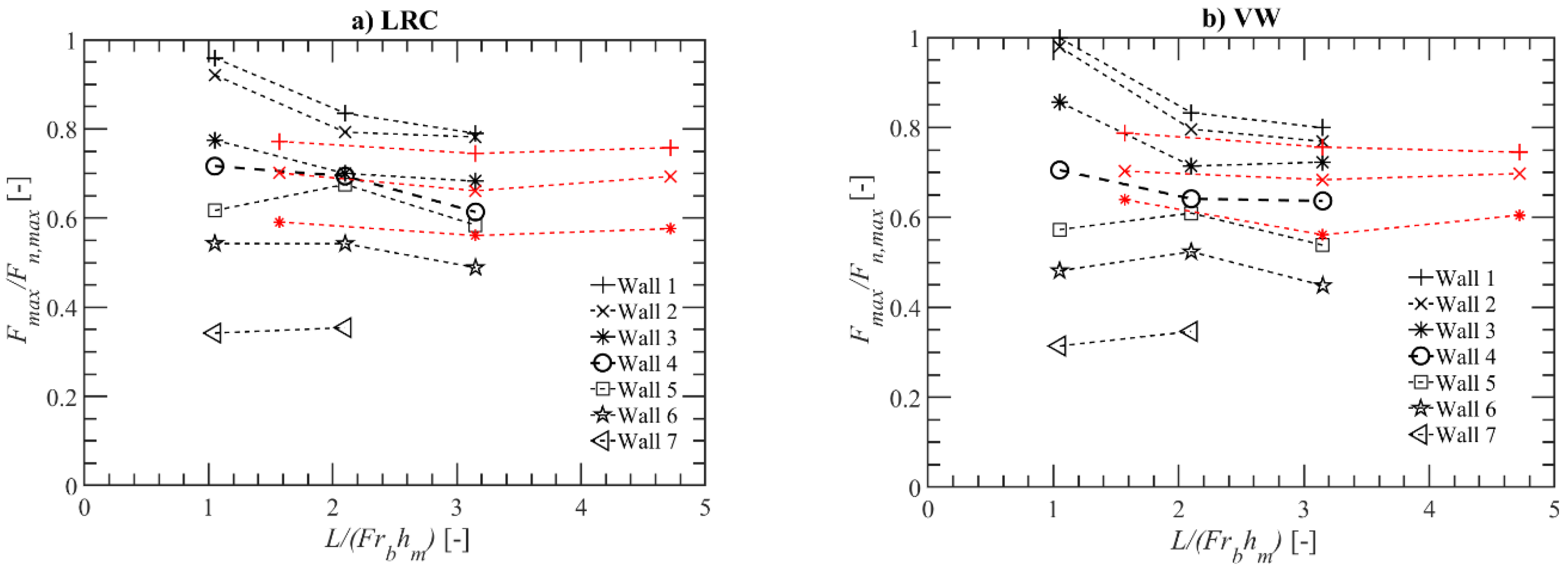
3.4.1. Effect of L
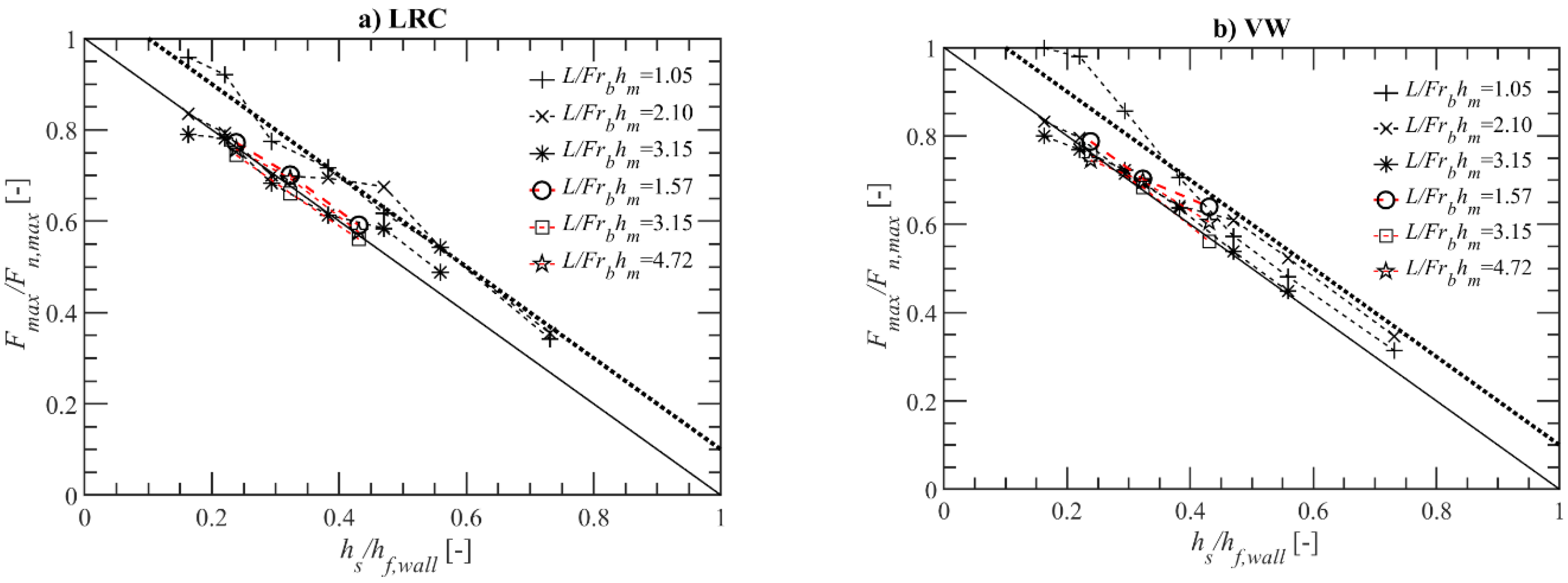
3.4.2. Effect of hs
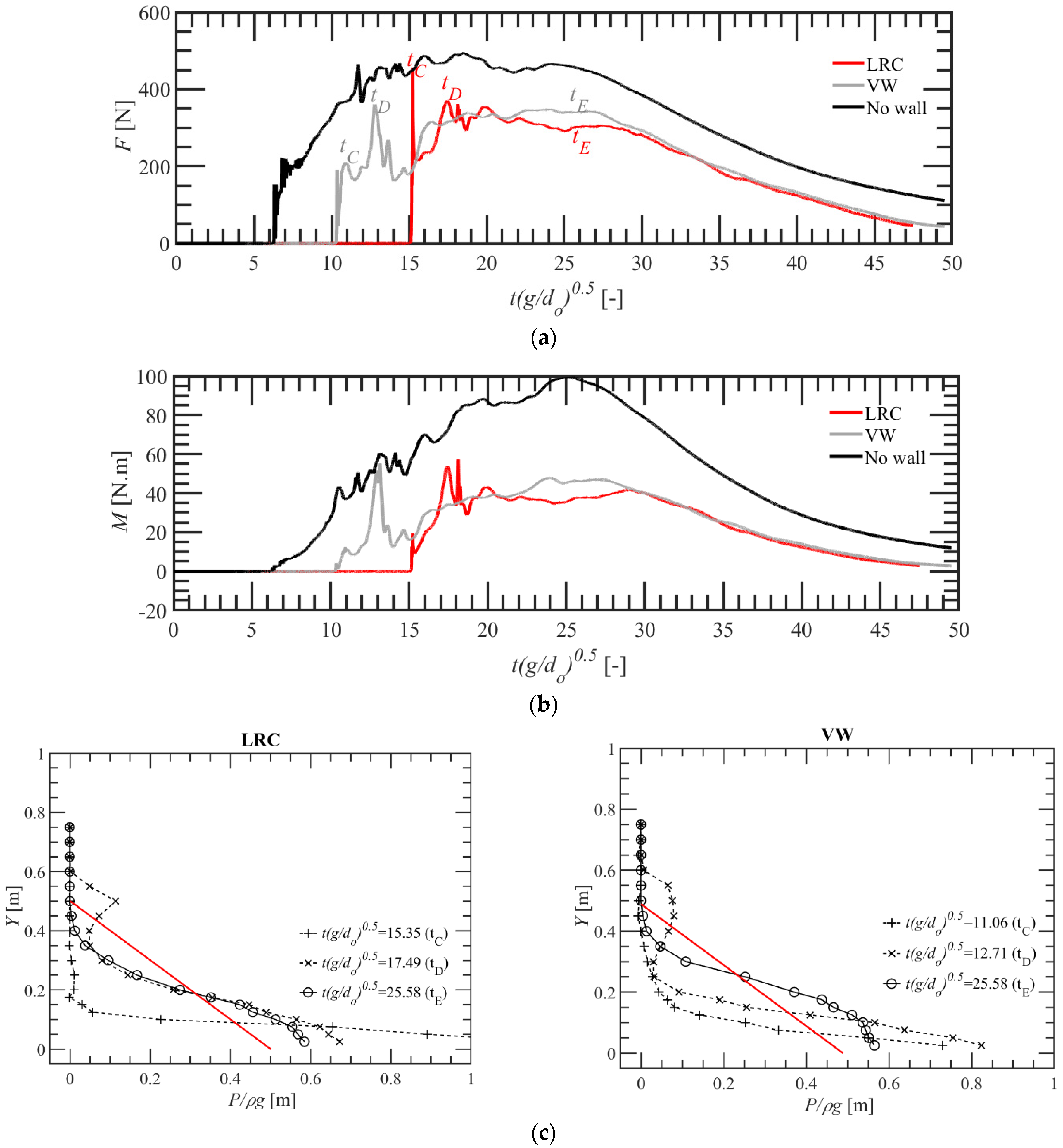
3.5. Moment on the Structure (M)
4. Conclusions and Outlook
- The LRC performs slightly better in force reduction in the case of a low-rise mitigation wall located near the structure (hs/hf, wall ≤ 0.29; L/Frbhm ≤ 2). For L/Frbhm > 2 and hs/hf,wall ≤ 0.29 and between 0.29 ≤ hs/hf, wall ≤ 0.4, the LRC and the VW perform closely. In terms of moment reduction, a slightly better performance by the LRC until hs/hf, wall ≤ 0.29, was observed. However, for high-rise mitigation walls (i.e., hs/hf,wall > 0.4), irrespective of L, the VW performs slightly better in force and moment reduction, although the difference in the force ratio (Fmax/Fn,max) and moment ratio (Mmax/Mn,max) between the VW and the LRC does not exceed more than 0.065 and 0.058, respectively, in any case. For practical purposes, it can be safely said that the LRC and the VW perform relatively the same when hs/hf, wall > 0.3.
- The LRC delays the period of surge interaction due to the flow recirculation at the structure front, compared to the VW. Furthermore, the time of impact (tim) increases gradually with the increase in hs for the LRC, whereas no significant difference in tim is observed with the increase in hs for the VW.
- Independent of the LRC and the VW, the force reduces linearly with the increase in hs/hf,wall. The overturning moment reduces exponentially. An empirical moment ratio (Mmax/Mn,max) is introduced in this study for practical application. One should also include the effect of L by adding suitable safety factors or including the results from this study when considering a low-rise mitigation wall.
- The change in the behaviour between the force reduction and the moment reduction can be related to the variation in the pressure profile and the decrease in the bore depth at the structure front. A high-rise mitigation wall induces local high pressure at the structure bottom, thereby reducing the lever arm and hence the moment. This is closely related to the reduced overtopped surge depth and increased Fr of the overtopping surge [38].
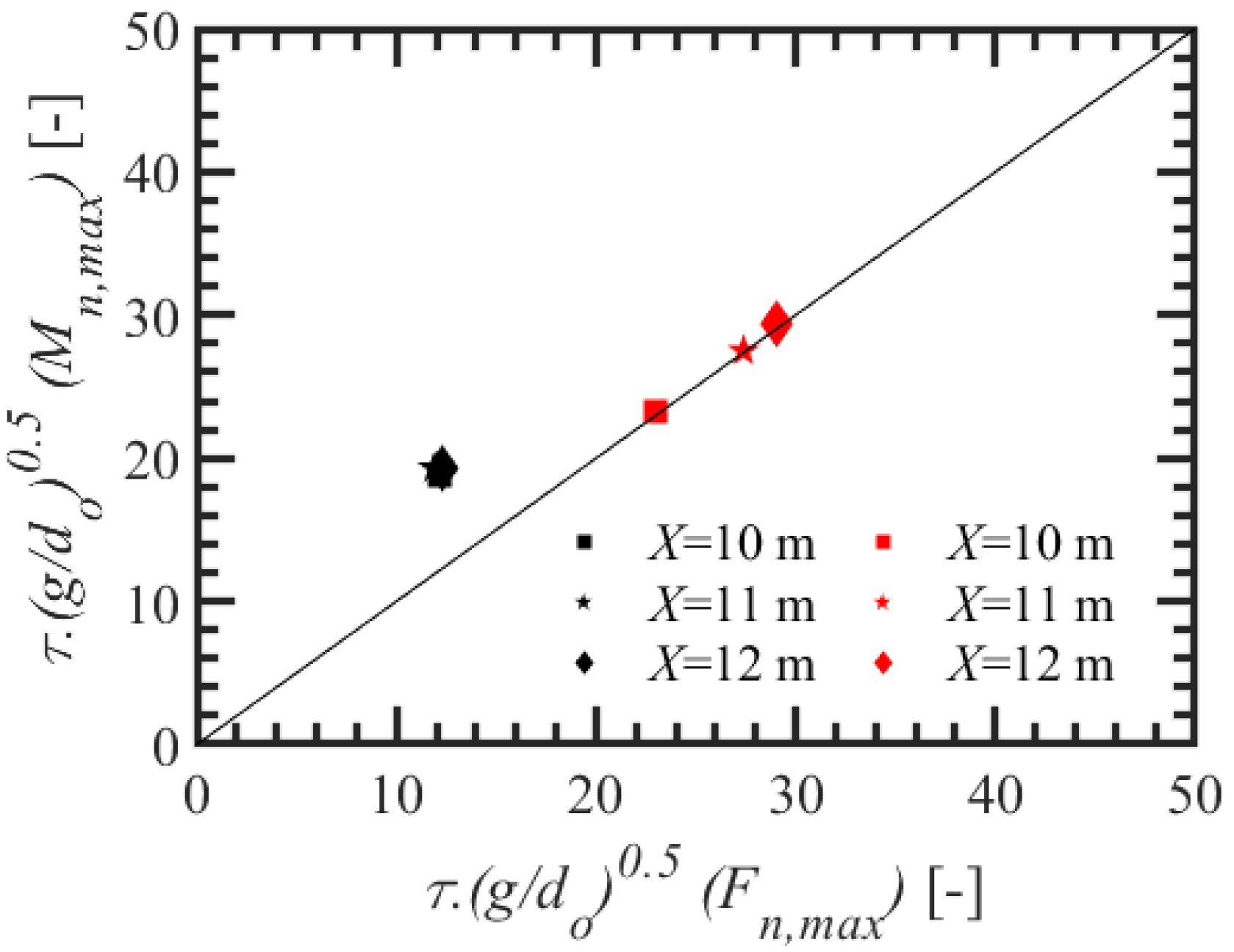
- The time of maximum moment may not occur at the time of maximum force. Accurate estimation of the moment (Mn,max) is essential for applying Equations (6) and (7). For immediate application, Equations (6) and (7) are suggested with careful selection of Cd and Ln,A.
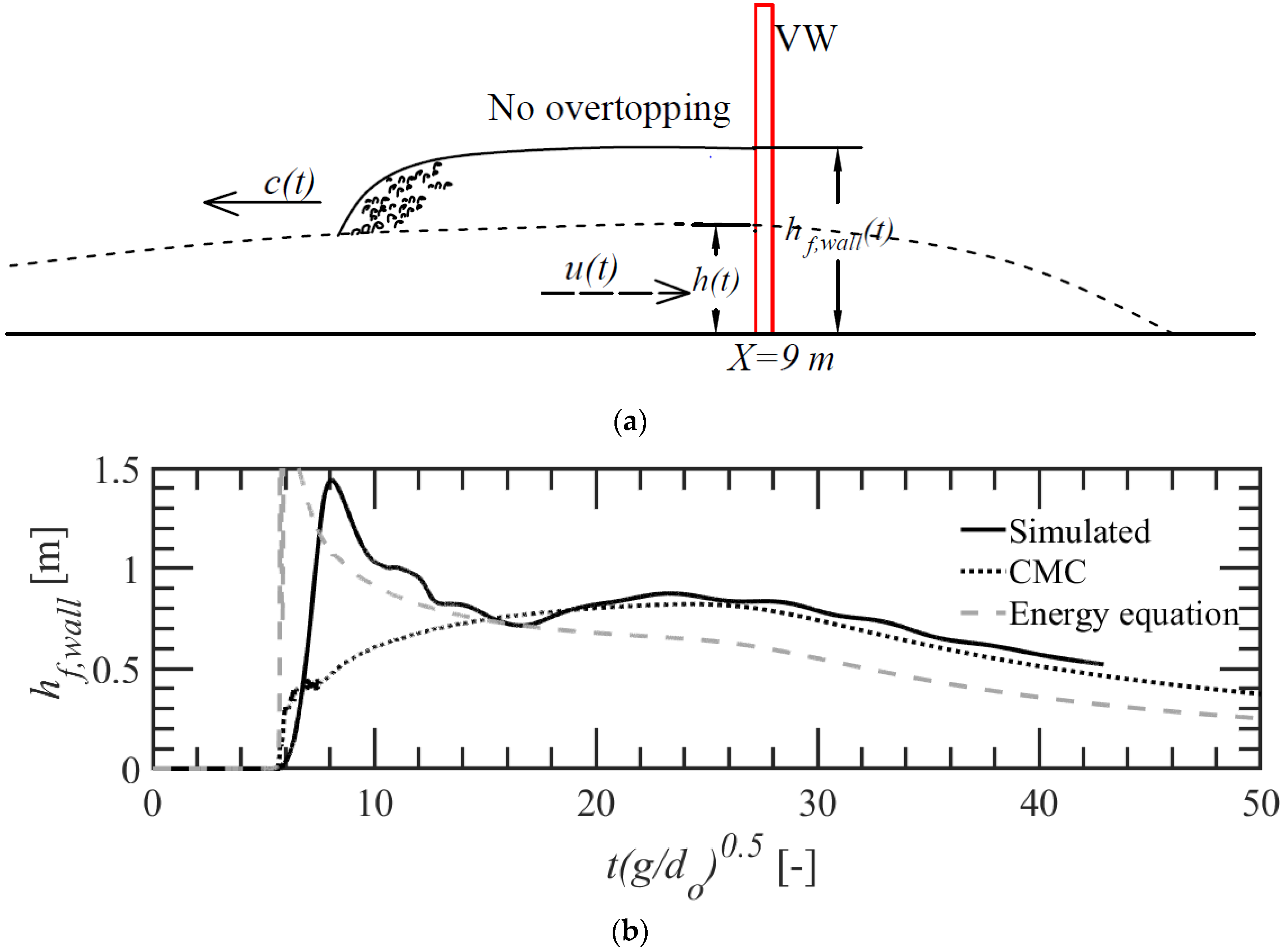
- Finally, hf,wall prediction using conservation of mass and momentum equations (Equation (4)) helped in a clear understanding of the force and moment variation for both the LRC and the VW. Hence, we suggest that future research shall consider non-dimensionalizing the mitigation wall depth using Equation (4) for a better understanding of the physical process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| List of Symbols | |
| b | Structure width |
| b/W | Structure width/flow channel width |
| Br | Overhanging length of the recurve |
| C | Surge front celerity |
| do | Impoundment depth in the tank |
| E | Summation of bore front velocity head and static head (i.e., Energy head) |
| F | Forces on the inland structure in the presence of the mitigation wall |
| Fn | Forces on the inland structure in the absence of the mitigation wall |
| Fmax | Maximum force on the inland structure in the presence of the mitigation wall |
| Fn,max | Maximum force on the inland structure in the absence of the mitigation wall |
| Fr | Froude number of the flow |
| Frb | Froude number evaluated using the bore front celerity |
| g | Acceleration due to gravity |
| h | Local time-varying inundation depth at any X |
| hb | Bore height at which the force on the inland structure is maximum |
| hf | Water depth at the inland structure front |
| hf,wall | Bore height at the VW front in the non-overtopping condition |
| hm | Maximum inundation depth at the mitigation wall location |
| hm1 | Maximum inundation depth at the inland structure location |
| Hr | Height of the recurve |
| hr | Bore depth at the inland structure backside |
| hs | Height of the mitigation wall |
| L | Distance between the inland structure and the mitigation wall |
| LA | Lever arm obtained by dividing Mmax and Fmax |
| Ln,A | Lever arm obtained by dividing Mn,max and Fn,max |
| M | The overturning moment on the inland structure in the presence of the mitigation wall |
| Mn | The overturning moment on the inland structure in the absence of the mitigation wall |
| Mmax | The maximum overturning moment on the inland structure in the presence of the mitigation wall |
| Mn,max | The maximum overturning moment on the inland structure in the absence of the mitigation wall |
| P | Pressure at the structure front |
| t | Time referenced with the tank opening |
| tD | Time instant at the initial turbulent reflection phase |
| tim | Time of interaction of surge with the inland structure in the presence of the mitigation wall |
| tn,im | Time of interaction of surge with the inland structure in the absence of the mitigation wall |
| u | Local time-varying velocity |
| W | Flow channel width |
| x | Axis along the length with origin at the origin of the tank |
| X | Local axis starting at the tank opening |
| y | Axis in the vertical direction, along the height, with the origin at the bottom of the tank |
| Y | The vertical height of the structure with origin at the bottom of the structure |
| z | Axis in the horizontal direction along the width with the origin at the origin of the tank |
| α | The ratio of the height of the recurve and the height of the mitigation wall |
| ρ | The density of the liquid |
| Definition of terms | |
| 2D wall | Vertical wall in the non-overtopping condition |
| CMC | Conservation of mass and momentum |
| FVM | Finite Volume Method |
| LRC | Large ReCurve wall |
| OF | OpenFOAM |
| RANS | Reynold’s Averaged Navier-Stokes Equations |
| Structure | Inland building model |
| VOF | Volume of Fluid |
| VW | Vertical Wall |
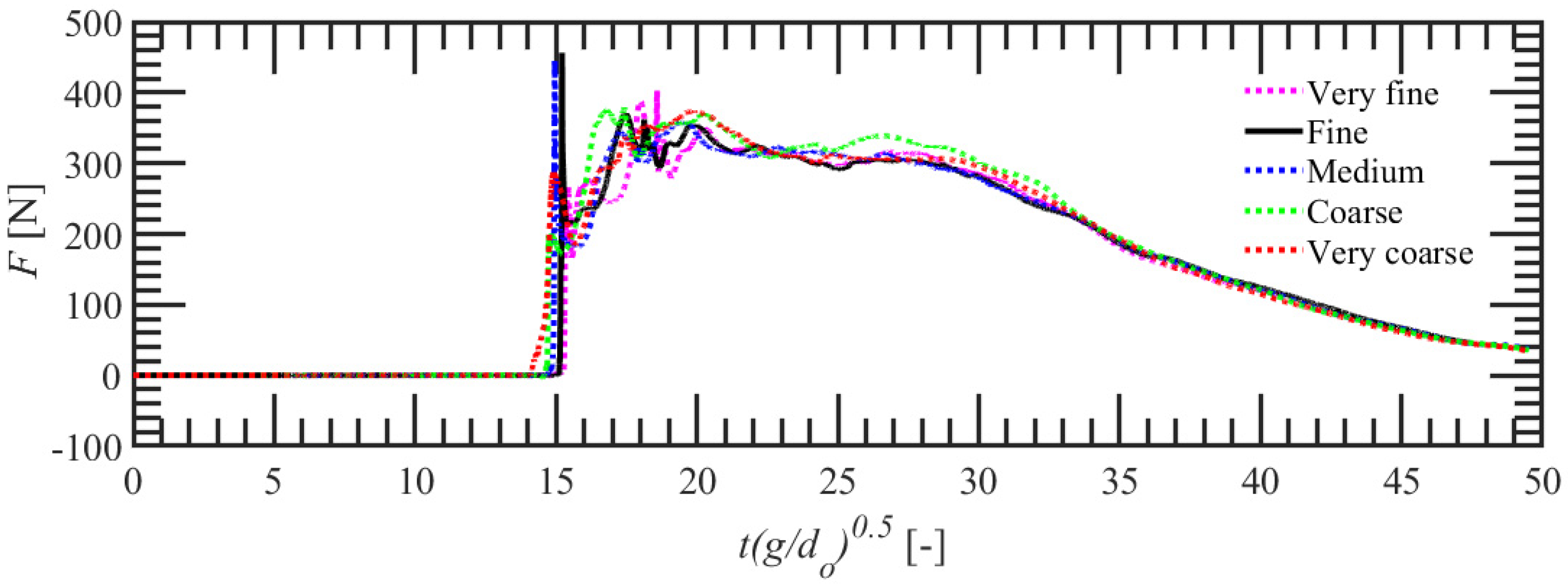
Appendix A. Sensitivity of the Mesh Density on the Forces on the Structure in the Presence of the Recurve

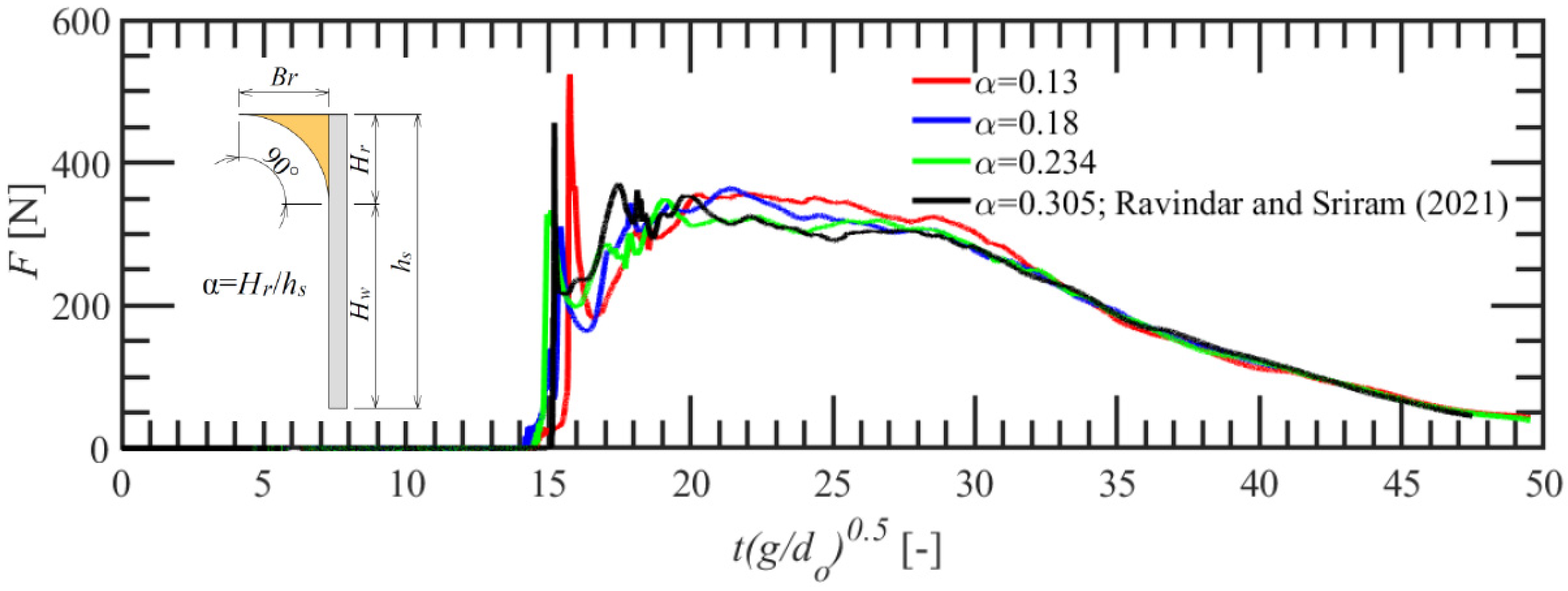
Appendix B. Effect of Recurve Size for an LRC on the Forces on the Land Structure
References
- Castellino, M.; Sammarco, P.; Romano, A.; Martinelli, L.; Ruol, P.; Franco, L.; De Girolamo, P. Large impulsive forces on recurved parapets under non-breaking waves. A numerical study. Coast. Eng. 2018, 136, 1–15. [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures, 3rd ed.; World Scientific: Hackensack, NJ, USA, 2010; ISBN 9789814282390. [Google Scholar]
- Veale, W.; Suzuki, T.; Verwaest, T.; Trouw, K.; Mertens, T. Integrated design of coastal protection works for Wenduine, Belgium. Coast. Eng. Proc. 2012, 1, 70. [Google Scholar] [CrossRef]
- Van Doorslaer, K.; De Rouck, J. Reduction on wave overtopping on a smooth dike by means of a parapet. Coast. Eng. Proc. 2011, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Allsop, W.; Alderson, J.; Chapman, A. Defending buildings and people against wave overtopping. Coast. Struct. 2007, 2, 1253–1262. [Google Scholar]
- Kortenhaus, A.; Haupt, R.; Oumeraci, H. Design aspects of vertical walls with steep foreland slopes. In Breakwaters. Coastal Structures and Coastlines: Proceedings of the International Conference Organized by the Institution of Civil Engineers and Held in London, UK on 26–28 September 2001; Thomas Telford: Overdale, UK, 2001; pp. 26–28. [Google Scholar]
- Cornett, A.; Li, Y.; Budvietas, A. Wave overtopping at chamfered and overhanging vertical structures. In Proceedings of the Workshop on Natural Disasters by Storm Waves and Their Reproduction in Experimental Basins, Kyoto, Japan, 14 December 1999. [Google Scholar]
- Murakami, K.; Irie, I.; Kamikubo, Y. Experiments on a Non-Wave Overtopping Type Seawall. Coast. Eng. Proc. 1996, 1, 25. [Google Scholar]
- Banyard, L.; Herbert, D.M. The Effect of Wave Angle on the Overtopping of Seawalls; Report SR396; HR Wallingford: Wallingford, UK, 1995. [Google Scholar]
- Owen, M.; Steele, A. Effectiveness of Recurved Wave Return Walls; HR Wallingford: Wallingford, UK, 1993. [Google Scholar]
- Heimbaugh, M.S.; Grace, P.J.; Ahrens, J.P.; Davidson, D.D. Coastal Engineering Studies in Support of Virginia Beach, Virginia, Beach Erosion Control and Hurricane Protection Project. Report 1. Physical Model Tests of Irregular Wave Overtopping and Pressure Measurements; US Army Corps of Engineers, WES: Vicksburg, MT, USA, 1988. [Google Scholar]
- Thorn, R.B.; Roberts, A.G. Sea Defense and Coast Protection Works; Thomas Telford Ltd.: London, UK, 1981; pp. 115–121, 179–183. [Google Scholar]
- Ravindar, R.; Sriram, V. Impact pressure and forces on a vertical wall with different types of parapet. J. Mar. Sci. Eng. 2021, 147, 04021007. [Google Scholar] [CrossRef]
- Stagonas, D.; Ravindar, R.; Sriram, V.; Schimmels, S. Experimental Evidence of the Influence of Recurves on Wave Loads at Vertical Seawalls; Gottfried Wilhelm Leibniz Universität Hannover; Technische Informationsbibliothek (TIB): Hannover, Germany, 2020. [Google Scholar]
- Martinelli, L.; Ruol, P.; Volpato, M.; Favaretto, C.; Castellino, M.; De Girolamo, P.; Franco, L.; Romano, A.; Sammarco, P. Experimental investigation on non-breaking wave forces and overtopping at the recurved parapets of vertical breakwaters. Coast. Eng. 2018, 141, 52–67. [Google Scholar] [CrossRef]
- Ravindar, R.; Sriram, V.; Schimmels, S.; Stagonas, D. Characterization of breaking wave impact on vertical wall with recurve. ISH J. Hydraul. Eng. 2019, 25, 153–161. [Google Scholar] [CrossRef]
- Frandsen, J.B.; Tremblay, O.G.; Xhardé, R. Preliminary investigations of wave impact on vertical walls with/without parapets and toe protection on deformable beach. In Proceedings of the 6th International Conference on the Application of Physical Modelling in Coastal and Port Engineering and Science (Coastlab16), Ottawa, ON, Canada, 10–13 May 2016. [Google Scholar]
- Blackmore, P.A.; Hewson, P.J. Experiments on full-scale wave impact pressures. Coast. Eng. 1984, 8, 331–346. [Google Scholar] [CrossRef]
- Manual, E. EurOtop-Wave Overtopping of Sea Defenses and Related Structures. An Overtopping Manual Largely Based on European Research, but for Worldwide Application, 320; EurOtop: Glendale, CA, USA, 2018. [Google Scholar]
- De Chowdhury, S.; Anand, K.V.; Sannasiraj, S.A.; Sundar, V. Nonlinear wave interaction with curved front seawalls. Ocean. Eng. 2017, 140, 84–96. [Google Scholar] [CrossRef]
- Anand, K.V.; Sundar, V.; Sannasiraj, S.A. Dynamic pressures on curved front seawall models under random waves. J. Hydrodyn. Ser. B 2010, 22, 538–544. [Google Scholar] [CrossRef]
- Anand, K.V.; Sundar, V. Comparison of Pressures Due to Random Waves on Vertical and Curved Seawalls. ISH J. Hydraul. Eng. 2010, 16 (Suppl. S1), 26–34. [Google Scholar] [CrossRef]
- Kanda, J. Consideration for effective height of sea walls against tsunami. Struct. Infrastruct. Eng. 2016, 12, 484–489. [Google Scholar] [CrossRef]
- Tsuji, Y.; Satake, K.; Ishibe, T.; Harada, T.; Nishiyama, A.; Kusumoto, S. Tsunami heights along the pacific coast of northern Honshu recorded from the 2011 Tohoku and previous great earthquakes. Pure Appl. Geophys. 2011, 171, 3183–3215. [Google Scholar] [CrossRef] [Green Version]
- Chock, G.; Carden, L.; Robertson, I.; Olsen, M.; Yu, G. Tohoku tsunami-induced building failure analysis with implications for U.S. tsunami and seismic design codes. Earthq. Spectra 2013, 29 (Suppl. S1), 99–126. [Google Scholar] [CrossRef]
- Oetjen, J.; Sundar, V.; Venkatachalam, S.; Reicherter, K.; Engel, M.; Schüttrumpf, H.; Sannasiraj, S.A. A comprehensive review on structural tsunami countermeasures. Nat. Hazards 2022, 1–31. [Google Scholar] [CrossRef]
- Lukkunaprasit, P.; Ruangrassamee, A. Building damage in Thailand in the 2004 Indian Ocean tsunami and clues for tsunami-resistant design. IES J. Part A Civ. Struct. Eng. 2008, 1, 17–30. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Kriebel, D.L. Lessons in engineering from the tsunami in Thailand. Bridge-Wash.-Natl. Acad. Eng. 2005, 35, 4–13. [Google Scholar]
- Crespo, A.J.C.; Gómez-Gesteira, M.; Dalrymple, R.A. 3D SPH simulation of large waves mitigation with a dike. J. Hydraul. Res. 2007, 45, 631–642. [Google Scholar] [CrossRef]
- Oshnack, M.E.; van de Lindt, J.; Gupta, R.; Cox, D.; Aguíñiga, F. Effectiveness of small onshore seawall in reducing forces induced by Tsunami bore: Large scale experimental study. J. Disaster Res. 2009, 4, 382–390. [Google Scholar] [CrossRef]
- Thomas, S.; Cox, D. Influence of finite-length seawalls for tsunami loading on coastal structures. J. Water Port. Coast. Ocean Eng. 2012, 138, 203–214. [Google Scholar] [CrossRef]
- Rahman, S.; Akib, S.; Khan, M.T.R.; Shirazi, S.M. Experimental study on tsunami risk reduction on coastal building fronted by sea wall. Struct. Infrastruct. Eng. 2014, 2014, 729357. [Google Scholar] [CrossRef] [PubMed]
- Al-Faesly, T.; Palermo, D.; Nistor, I.; Cornett, A. Experimental modeling of extreme hydrodynamic forces on structural models. Int. J. Prot. Struct. 2012, 3, 477–505. [Google Scholar] [CrossRef]
- Ravindar, R.; Sriram, V.; Schimmels, S.; Stagonas, D. Approaches in Scaling Small-Scale Experiments on the Breaking Wave Interactions with a Vertical Wall Attached with Recurved Parapets. J. Water Port. Coast. Ocean Eng. 2021, 147, 04021034. [Google Scholar] [CrossRef]
- Istrati, D. Large-Scale Experiments of Tsunami Inundation of Bridges Including Fluid-Structure-Interaction. Ph.D. Thesis, University of Nevada, Reno, NV, USA, 2017. [Google Scholar]
- Bullock, G.N.; Obhrai, C.; Peregrine, D.H.; Bredmose, H. Violent breaking wave impacts. Part 1: Results from large-scale regular wave tests on vertical and sloping walls. Coast. Eng. 2007, 54, 602–617. [Google Scholar] [CrossRef]
- Triatmadja, R.; Nurhasanah, A. Tsunami force on buildings with openings and protection. J. Earthq. Tsunami 2012, 6, 1250024. [Google Scholar] [CrossRef] [Green Version]
- Arimitsu, T.; Kawasaki, K. Development of estimation method of tsunami wave pressure exerting on land structure using depth-integrated flow model. Coast. Eng. J. 2016, 58, 1640021. [Google Scholar] [CrossRef] [Green Version]
- Esteban, M.; Glasbergen, T.; Takabatake, T.; Hofland, B.; Nishizaki, S.; Nishida, Y.; Stolle, J.; Nistor, I.; Bricker, J.; Takagi, H.; et al. Overtopping of coastal structures by tsunami waves. Geosciences 2017, 7, 121. [Google Scholar] [CrossRef] [Green Version]
- Esteban, M.; Roubos, J.J.; Iimura, K.; Salet, J.T.; Hofland, B.; Bricker, J.; Ishii, H.; Hamano, G.; Takabatake, T.; Shibayama, T. Effect of bed roughness on tsunami bore propagation and overtopping. Coast. Eng. 2020, 157, 103539. [Google Scholar] [CrossRef]
- Asakura, R.; Iwase, K.; Ikeya, T.; Takao, M.; Kaneto, T.; Fujii, N.; Ohmori, M. The tsunami wave force acting on land structures. In Coastal Engineering 2002: Solving Coastal Conundrums; World Scientific: Singapore, 2002; pp. 1191–1202. [Google Scholar]
- Sakakiyama, T. Tsunami pressure on structures due to tsunami inundation flow. Coast. Eng. Proc. 2014, 1, 42. [Google Scholar] [CrossRef] [Green Version]
- Prabu, P.; Bhallamudi, S.M.; Chaudhuri, A.; Sannasiraj, S.A. Numerical investigations for mitigation of tsunami wave impact on onshore buildings using sea dikes. Ocean Eng. 2019, 187, 106159. [Google Scholar] [CrossRef]
- Xu, Z.; Melville, B.; Whittaker, C.; Nandasena, N.A.K.; Shamseldin, A. Mitigation of tsunami bore impact on a vertical wall behind a barrier. Coast. Eng. 2021, 164, 103833. [Google Scholar] [CrossRef]
- Harish, S.; Saincher, S.; Sriram, V.; Schüttrumpf, H.; Sannasiraj, S.A. Numerical investigation of tsunami-like bore induced forces on overtopped buildings. In Proceedings of the OCEANS 2022-Chennai 2022, Chennai, India, 21–24 February 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Asadollahi, N.; Nistor, I.; Mohammadian, A. Numerical investigation of tsunami bore effects on structures, part I: Drag coefficients. Nat. Hazards 2019, 96, 285–309. [Google Scholar] [CrossRef]
- Sarjamee, S. Numerical investigation of the influence of extreme hydrodynamic forces on the geometry of structures using OpenFOAM. Natural Hazards 2017, 87, 217–235. [Google Scholar] [CrossRef]
- Xiang, T.; Istrati, D.; Yim, S.C.; Buckle, I.G.; Lomonaco, P. Tsunami loads on a representative coastal bridge deck: Experimental study and validation of design equations. J. Water Port. Coast. Ocean Eng. 2020, 146, 04020022. [Google Scholar] [CrossRef]
- Istrati, D.; Hasanpour, A.; Buckle, I. Numerical Investigation of Tsunami-Borne Debris Damming Loads on a Coastal Bridge. In Proceedings of the 17 World Conference on Earthquake Engineering, Sendai, Japan, 13–18 September 2020; Volume 27. [Google Scholar]
- Sriram, V.; Ma, Q.W. Review on the local weak form-based meshless method (MLPG): Developments and Applications in Ocean Engineering. Appl. Ocean Res. 2021, 116, 102883. [Google Scholar] [CrossRef]
- Sriram, V.; Ma, Q.W. Improved MLPG_R method for simulating 2D interaction between violent waves and elastic structures. J. Comput. Phys. 2012, 231, 7650–7670. [Google Scholar] [CrossRef]
- Saincher, S.; Sriram, V. An efficient operator-split CICSAM scheme for three-dimensional multiphase-flow problems on Cartesian grids. Comput. Fluids 2022, 240, 105440. [Google Scholar] [CrossRef]
- Hasanpour, A.; Istrati, D.; Buckle, I. Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures. J. Mar. Sci. Eng. 2021, 9, 1068. [Google Scholar] [CrossRef]
- Luo, M.; Khayyer, A.; Lin, P. Particle methods in ocean and coastal engineering. Appl. Ocean Res. 2021, 114, 102734. [Google Scholar] [CrossRef]
- Pringgana, G.; Cunningham, L.S.; Rogers, B.D. Influence of orientation and arrangement of structures on Tsunami impact forces: Numerical investigation with smoothed particle hydrodynamics. J. Water Port. Coast. Ocean Eng. 2021, 147, 04021006. [Google Scholar] [CrossRef]
- Ishii, H.; Takabatake, T.; Esteban, M.; Stolle, J.; Shibayama, T. Experimental and numerical investigation on tsunami run-up flow around coastal buildings. Coast. Eng. J. 2021, 63, 485–503. [Google Scholar] [CrossRef]
- Chanson, H. Tsunami surges on dry coastal plains: Application of dam break wave equations. Coast. Eng. J. 2006, 48, 355–370. [Google Scholar] [CrossRef] [Green Version]
- Nouri, Y.; Nistor, I.; Palermo, D.; Cornett, A. Experimental investigation of tsunami impact on free standing structures. Coast. Eng. J. 2010, 52, 43–70. [Google Scholar] [CrossRef]
- Harish, S.; Sriram, V.; Sundar, V.; Sannasiraj, S.A.; Didenkulova, I. Impact of Flow-Driven Debris on Coastal Structure During Tsunami Bore. In Proceedings of the Fourth International Conference in Ocean Engineering; Springer: Singapore, 2018; pp. 315–326. [Google Scholar]
- Molines, J.; Bayón, A.; Gómez-Martín, M.E.; Medina, J.R. Numerical Study of Wave Forces on Crown Walls of Mound Breakwaters with Parapets. J. Mar. Sci. and Eng. 2020, 8, 276. [Google Scholar] [CrossRef]
- Bricker, J.D.; Nakayama, A. Contribution of trapped air, deck superelevation, and nearby structures to bridge deck failure during a tsunami. J. Hydraul. Eng. 2014, 140, 05014002. [Google Scholar] [CrossRef]
- Ritter, A. Die fortpflanzung der wasserwellen. Z. Des Ver. Dtsch. Ing. 1892, 36, 947–954. [Google Scholar]
- Fritz, H.M.; Phillips, D.A.; Okayasu, A.; Shimozono, T.; Liu, H.; Mohammed, F.; Skanavis, V.; Synolakis, C.E.; Takahashi, T. The 2011 Japan tsunami current velocity measurements from survivor videos at Kesennuma Bay using LiDAR. Geophys. Res. Lett. 2012, 39, L00G23. [Google Scholar] [CrossRef]
- Matsutomi, H.; Shuto, N.; Imamura, F.; Takahashi, T. Field survey of the 1996 Irian Jaya earthquake tsunami in Biak Island. Nat. Hazards 2001, 24, 199–212. [Google Scholar] [CrossRef]
- Fritz, H.M.; Borrero, J.C.; Synolakis, C.E.; Yoo, J. 2004 Indian Ocean tsunami flow velocity measurements from survivor videos. Geophys. Res. Lett. 2006, 33, L24605. [Google Scholar] [CrossRef]
- Matsutomi, H.; Okamoto, K. Inundation flow velocity of tsunami on land. Island Arc 2010, 19, 443–457. [Google Scholar] [CrossRef]
- Jaffe, B.E.; Goto, K.; Sugawara, D.; Richmond, B.M.; Fujino, S.; Nishimura, Y. Flow speed estimated by inverse modeling of sandy tsunami deposits: Results from the 11 March 2011 tsunami on the coastal plain near the Sendai Airport, Honshu, Japan. Sediment. Geol. 2011, 282, 90–109. [Google Scholar] [CrossRef]
- ASCE7-16 (Structural Engineering Institute). Minimum Design Loads for Buildings and Other Structures; ASCE/SEI 7-16; Structural Engineering Institute: Reston, VA, USA, 2016; Volume A, pp. 7–16. [Google Scholar]
- Wüthrich, D.; Pfister, M.; Nistor, I.; Schleiss, A.J. Experimental study on the hydrodynamic impact of tsunami-like waves against impervious free-standing buildings. Coast. Eng. J. 2018, 60, 180–199. [Google Scholar] [CrossRef]
- Cross, R.H., III. Tsunami surge forces. J. Waterw. Harb. Div. 1967, 93, 201–231. [Google Scholar] [CrossRef]
- Ramsden, J.D.; Raichlen, F. Forces on vertical wall caused by incident bores. J. Water Port. Coast. Ocean Eng. 1990, 116, 592–613. [Google Scholar] [CrossRef]
- Arnason, H.; Petroff, C.; Yeh, H. Tsunami bore impingement onto a vertical column. J. Disaster Res. 2009, 4, 391–403. [Google Scholar] [CrossRef]
- Robertson, I.N.; Paczkowski, K.; Riggs, H.R.; Mohamed, A. Experimental investigation of tsunami bore forces on vertical walls. J. Offsh. Mech. Arct. Eng. 2013, 135, 021601. [Google Scholar] [CrossRef]
- Kihara, N.; Niida, Y.; Takabatake, D.; Kaida, H.; Shibayama, A.; Miyagawa, Y. Large-scale experiments on tsunami-induced pressure on a vertical tide wall. Coast. Eng. 2015, 99, 46–63. [Google Scholar] [CrossRef]
- Ko, H.T.S.; Yeh, H. On the splash-up of tsunami bore impact. Coast. Eng. 2018, 131, 1–11. [Google Scholar] [CrossRef]
- Kihara, N.; Arikawa, T.; Asai, T.; Hasebe, M.; Ikeya, T.; Inoue, S.; Kaida, H.; Matsutomi, H.; Nakano, Y.; Okuda, Y.; et al. A physical model of tsunami inundation and wave pressures for an idealized coastal industrial site. Coast. Eng. 2021, 169, 103970. [Google Scholar] [CrossRef]
- Cumberbatch, E. The impact of a water wedge on a wall. J. Fluid Mech. 1960, 7, 353–374. [Google Scholar] [CrossRef]
- Nakamura, S.; Tsuchiya, Y. On the Shock Pressure of Surge on a Wall; Bulletin of the Disaster Prevention Research Institute: Kyoto, Japan, 1973; pp. 3–4. [Google Scholar]
- Shen, J.; Wei, L.; Wu, D.; Liu, H.; Huangfu, J. pressure on a vertical wall. Coast. Eng. J. 2020, 62, 566–581. [Google Scholar] [CrossRef]
- Shafiei, S.; Melville, B.W.; Shamseldin, A.Y. Experimental investigation of tsunami bore impact force and pressure on a square prism. Coast. Eng. 2016, 110, 1–16. [Google Scholar] [CrossRef]
- Harish, S.; Sriram, V.; Schüttrumpf, H.; Sannasiraj, S.A. Tsunami-like flow induced force on the structure: Prediction formulae for the horizontal force in quasi-steady flow phase. Coast. Eng. 2021, 168, 103938. [Google Scholar] [CrossRef]
- Ikeya, T.; Suenaga, S.; Fukuyama, T.; Akiyama, Y.; Suzuki, N.; Tateno, T. Evaluation method of tsunami wave force acting on land structures considering reflection properties. J. JSCE Ser. B2 2015, 72, 985–990. [Google Scholar]
- Istrati, D.; Buckle, I.; Lomonaco, P.; Yim, S. Deciphering the tsunami wave impact and associated connection forces in open-girder coastal bridges. J. Mar. Sci. Eng. 2018, 6, 148. [Google Scholar] [CrossRef] [Green Version]
- Fujima, K.; Achmad, F.; Shigihara, Y.; Mizutani, N. Estimation of tsunami force acting on rectangular structures. J. Disaster Res. 2009, 4, 404–409. [Google Scholar] [CrossRef]
- Xie, P.; Chu, V.H. The forces of tsunami waves on a vertical wall and on a structure of finite width. Coast. Eng. 2019, 149, 65–80. [Google Scholar] [CrossRef]
- Wüthrich, D.; Pfister, M.; Schleiss, A.J. Effect of bed roughness on tsunami-like waves and induced loads on buildings. Coast. Eng. 2019, 152, 103508. [Google Scholar] [CrossRef]
- Ikeya, T.; Iwamae, N.; Suenaga, S.; Akiyama, Y.; Tateno, T.; Suzuki, N. The evaluation model of tsunami wave force acting on columnar body considering pressure distribution. J. Jpn. Soc. Civ. Eng. Ser. B3 2014, 70, I_396–I_401. (In Japanese) [Google Scholar]
- Harish, S.; Sriram, V.; Schüttrumpf, H.; Sannasiraj, S.A. Tsunami-like flow induced forces on the structure: Dependence of the hydrodynamic force coefficients on Froude number and flow channel width in quasi-steady flow phase. Coast. Eng. 2022, 172, 104078. [Google Scholar] [CrossRef]
- Foster, A.S.J.; Rossetto, T.; Allsop, W. An experimentally validated approach for evaluating tsunami inundation forces on rectangular buildings. Coast. Eng. 2017, 128, 44–57. [Google Scholar] [CrossRef]
- Qi, Z.X.; Eames, I.; Johnson, E.R. Force acting on a square cylinder fixed in a free-surface channel flow. J. Fluid Mech. 2014, 756, 716–727. [Google Scholar] [CrossRef] [Green Version]
- Applied Technology Council, National Earthquake Hazards Reduction Program (US); National Tsunami Hazard Mitigation Program (US). Guidelines for Design of Structures for Vertical Evacuation from Tsunamis; US Department of Homeland Security, FEMA: Washington, DC, USA, 2012.
- Ikeya, T.; Akiyama, Y.; Iwamae, N. On the hydraulic mechanism of sustained tsunami wave pressure acting on land structures. J. JSCE B 2 2013, 69, I_816–I_820. (In Japanese) [Google Scholar]
- Kihara, N.; Kaida, H. An application of semi-empirical physical model of tsunami-bore pressure on buildings. Front. Built Environ. 2019, 5, 3. [Google Scholar] [CrossRef]
- Rivière, N.; Vouaillat, G.; Launay, G.; Mignot, E. Emerging obstacles in supercritical open-channel flows: Detached hydraulic jump versus wall-jet-like bow wave. J. Hydraul. Eng. 2017, 143, 04017011. [Google Scholar] [CrossRef] [Green Version]
- Heller, V. Scale effects in physical hydraulic engineering models. J. Hydraul. Res. 2011, 49, 293–306. [Google Scholar] [CrossRef]
- Chandler, I.; Allsop, W.; Robinson, D.; Rossetto, T. Evolution of pneumatic Tsunami Simulators–from concept to proven experimental technique. Front. Built Environ. 2021, 7, 86. [Google Scholar] [CrossRef]
- Sriram, V.; Didenkulova, I.; Sergeeva, A.; Schimmels, S. Tsunami evolution and run-up in a large scale experimental facility. Coast. Eng. 2016, 111, 1–12. [Google Scholar] [CrossRef]
- Shuto, N. The Nihonkai-Chubu earthquake tsunami on the North Akita coast. Coast. Eng. Jpn. 1985, 28, 255–264. [Google Scholar] [CrossRef]
- Peregrine, D.H.; Bredmose, H.; Bullock, G.; Obrhai, C.; Müller, G.; Wolters, G. Water wave impact on walls and the role of air. Coast. Eng. 2004, 4, 4005–4017. [Google Scholar] [CrossRef]
- Jayaratne, M.P.; Premaratne, B.; Adewale, A.; Mikami, T.; Matsuba, S.; Shibayama, T.; Esteban, M.; Nistor, I. Failure mechanisms and local scour at coastal structures induced by tsunami. Coast. Eng. J. 2016, 58, 1640017. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LRC | VW | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| do (m) | Nomenclature | hs (m) (Model) | hs/hm (-) | hs/hf,wall (-) | L = 1 m | L = 2 m | L = 3 m | L = 1 m | L = 2 m | L = 3 m | |
| With building | 0.9 | 0 | 0 | 0 | ✓ | ✓ | ✓ | - | - | - | |
| 0.9 | Wall 1 | 0.1333 | 0.53 | 0.16 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 2 | 0.1809 | 0.72 | 0.22 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 3 | 0.2412 | 0.96 | 0.29 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 4 | 0.3136 | 1.24 | 0.38 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 5 | 0.3836 | 1.52 | 0.47 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 6 | 0.4583 | 1.82 | 0.56 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.9 | Wall 7 | 0.6 | 2.38 | 0.73 | ✓ | ✓ | - | ✓ | ✓ | - | |
| 0.6 | 0 | 0 | 0 | ✓ | ✓ | ✓ | - | - | - | ||
| 0.6 | Wall 1 | 0.1333 | 0.79 | 0.24 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.6 | Wall 2 | 0.1809 | 1.08 | 0.32 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0.6 | Wall 3 | 0.2412 | 1.44 | 0.43 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Without building (free flow simulation) | 0.9 | ✓ | |||||||||
| 0.6 | ✓ | ||||||||||
| L | 1 m | 2 m | 3 m | |
|---|---|---|---|---|
| do | ||||
| 0.9 m | 1.67 | 1.68 | 1.68 | |
| 0.6 m | 1.83 | 1.81 | 1.80 | |
| L | 1 m | 2 m | 3 m | |
|---|---|---|---|---|
| do | ||||
| 0.9 m | 2.393 | 2.52 | 2.58 | |
| 0.6 m | 2.11 | 2.0 | 2.03 | |
| L | 1 m | 2 m | 3 m | |
|---|---|---|---|---|
| do | ||||
| 0.9 m | 0.83 | 0.84 | 0.85 | |
| 0.6 m | 0.86 | 0.92 | 0.94 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harish, S.; Sriram, V.; Schüttrumpf, H.; Sannasiraj, S.A. Tsunami-like Flow-Induced Forces on the Landward Structure behind a Vertical Seawall with and without Recurve Using OpenFOAM. Water 2022, 14, 1986. https://doi.org/10.3390/w14131986
Harish S, Sriram V, Schüttrumpf H, Sannasiraj SA. Tsunami-like Flow-Induced Forces on the Landward Structure behind a Vertical Seawall with and without Recurve Using OpenFOAM. Water. 2022; 14(13):1986. https://doi.org/10.3390/w14131986
Chicago/Turabian StyleHarish, S., V. Sriram, Holger Schüttrumpf, and S. A. Sannasiraj. 2022. "Tsunami-like Flow-Induced Forces on the Landward Structure behind a Vertical Seawall with and without Recurve Using OpenFOAM" Water 14, no. 13: 1986. https://doi.org/10.3390/w14131986
APA StyleHarish, S., Sriram, V., Schüttrumpf, H., & Sannasiraj, S. A. (2022). Tsunami-like Flow-Induced Forces on the Landward Structure behind a Vertical Seawall with and without Recurve Using OpenFOAM. Water, 14(13), 1986. https://doi.org/10.3390/w14131986