Study of the Drag Reduction Characteristics of Circular Cylinder with Dimpled Surface

Abstract
:1. Introduction
2. Numerical Simulation Method
2.1. Turbulence Model and Transition Model
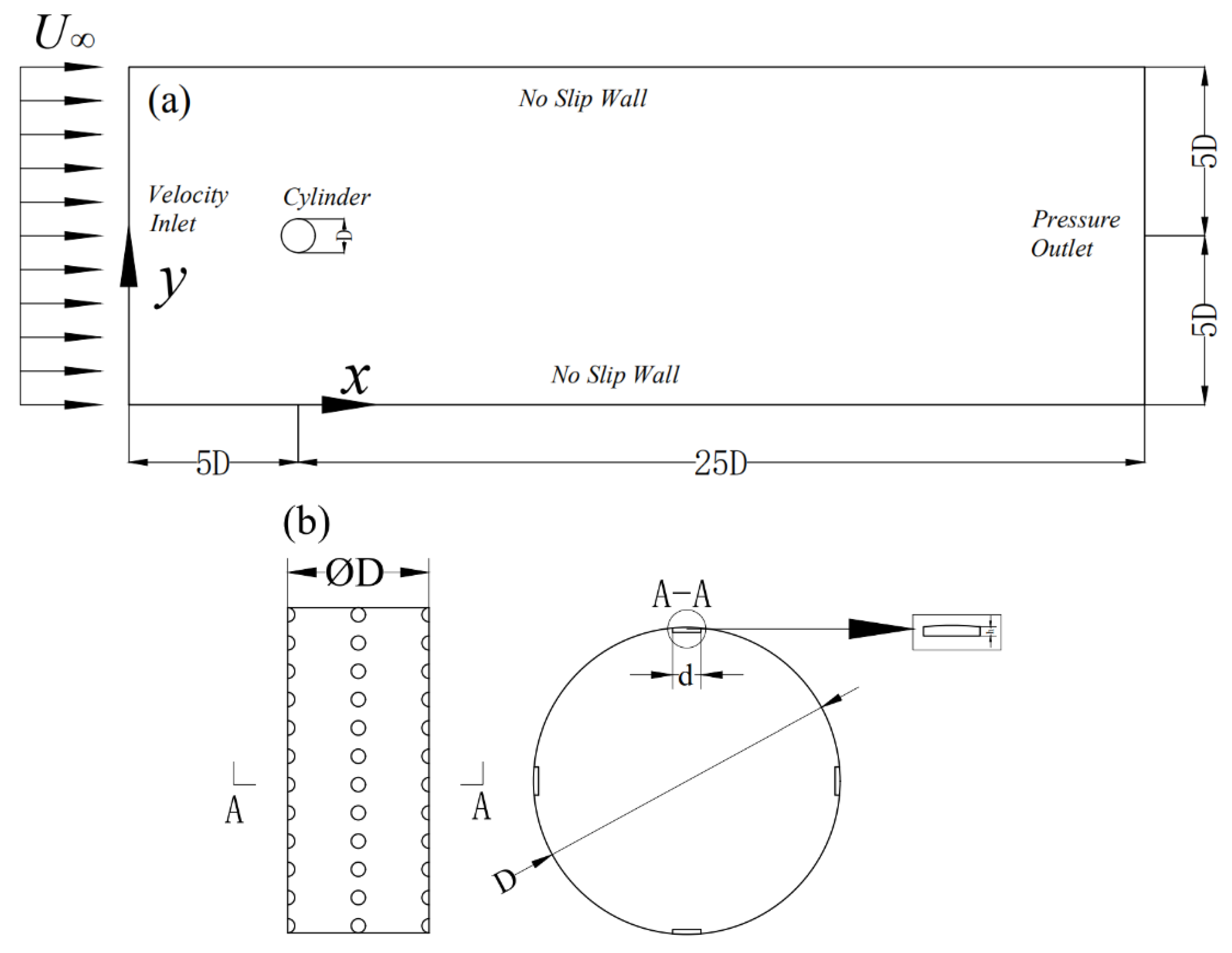
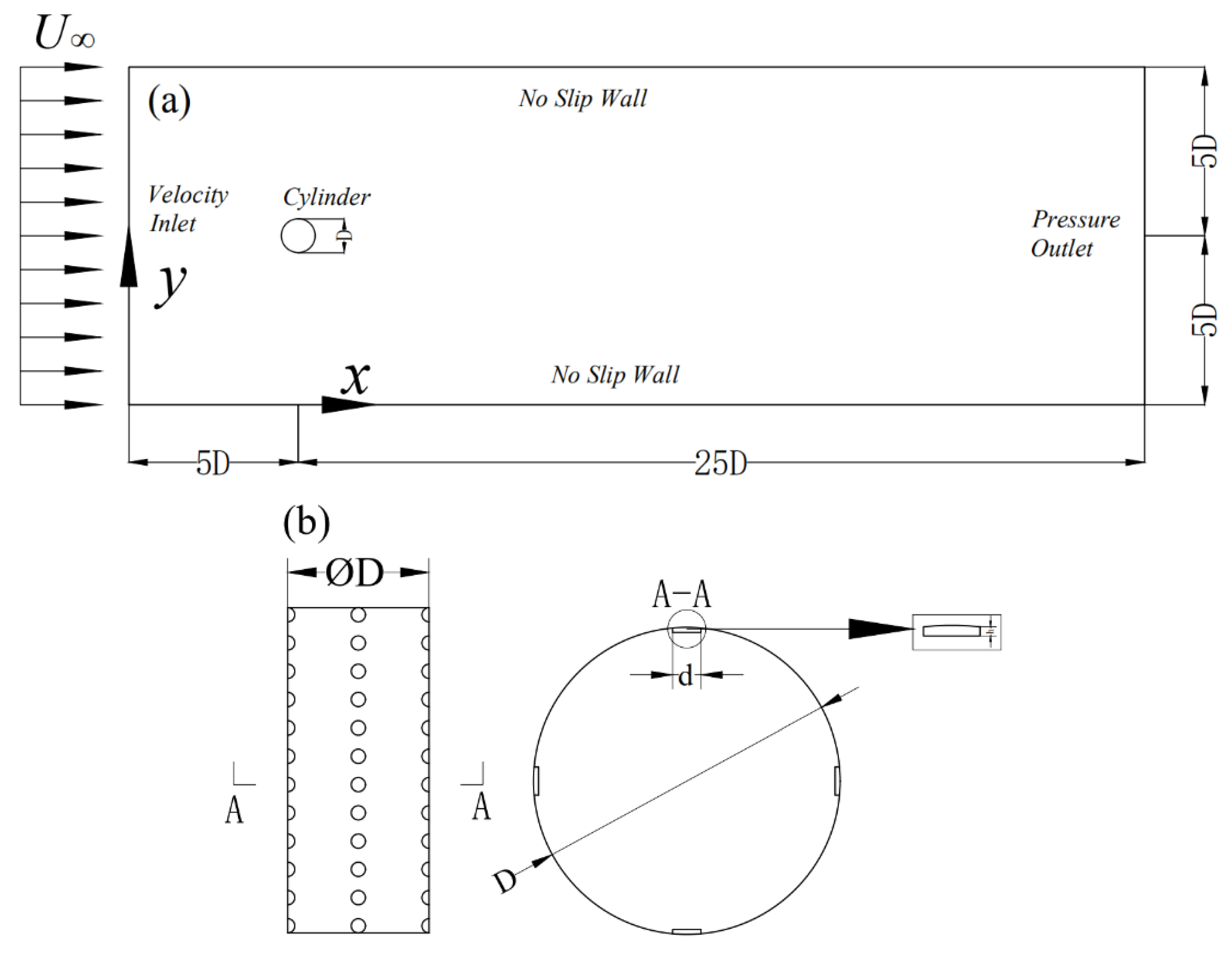
2.2. Computational Domains and Boundary Conditions
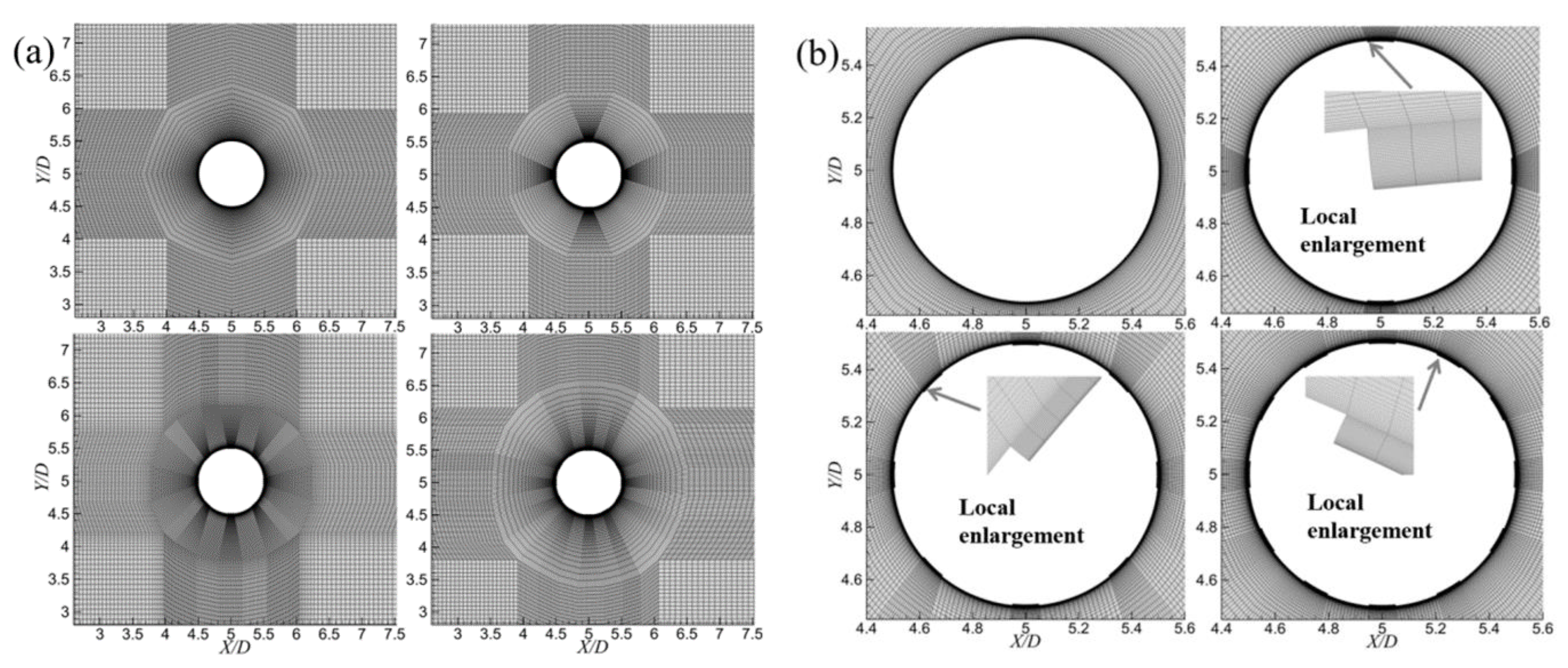
2.3. Computational Mesh
2.4. Parameter Verification
2.5. Numerical Simulation Parameters Setting
3. Numerical Simulation Results and Discussion
3.1. Drag Coefficient
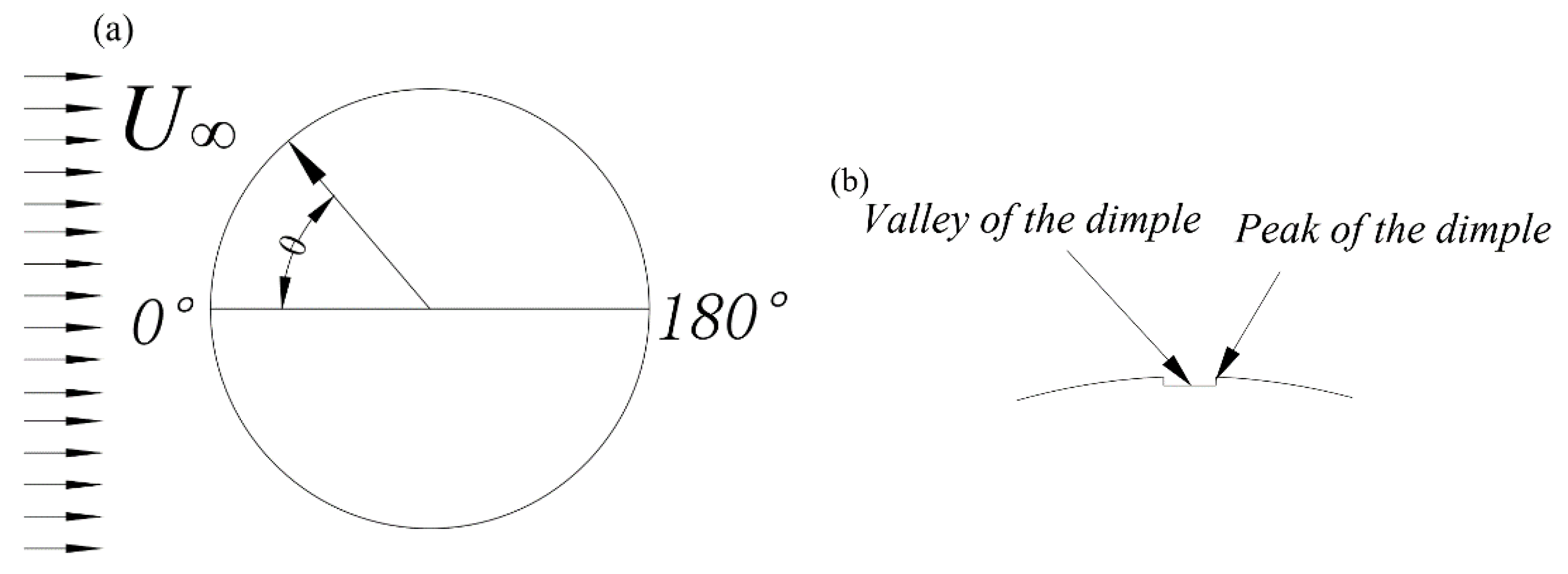
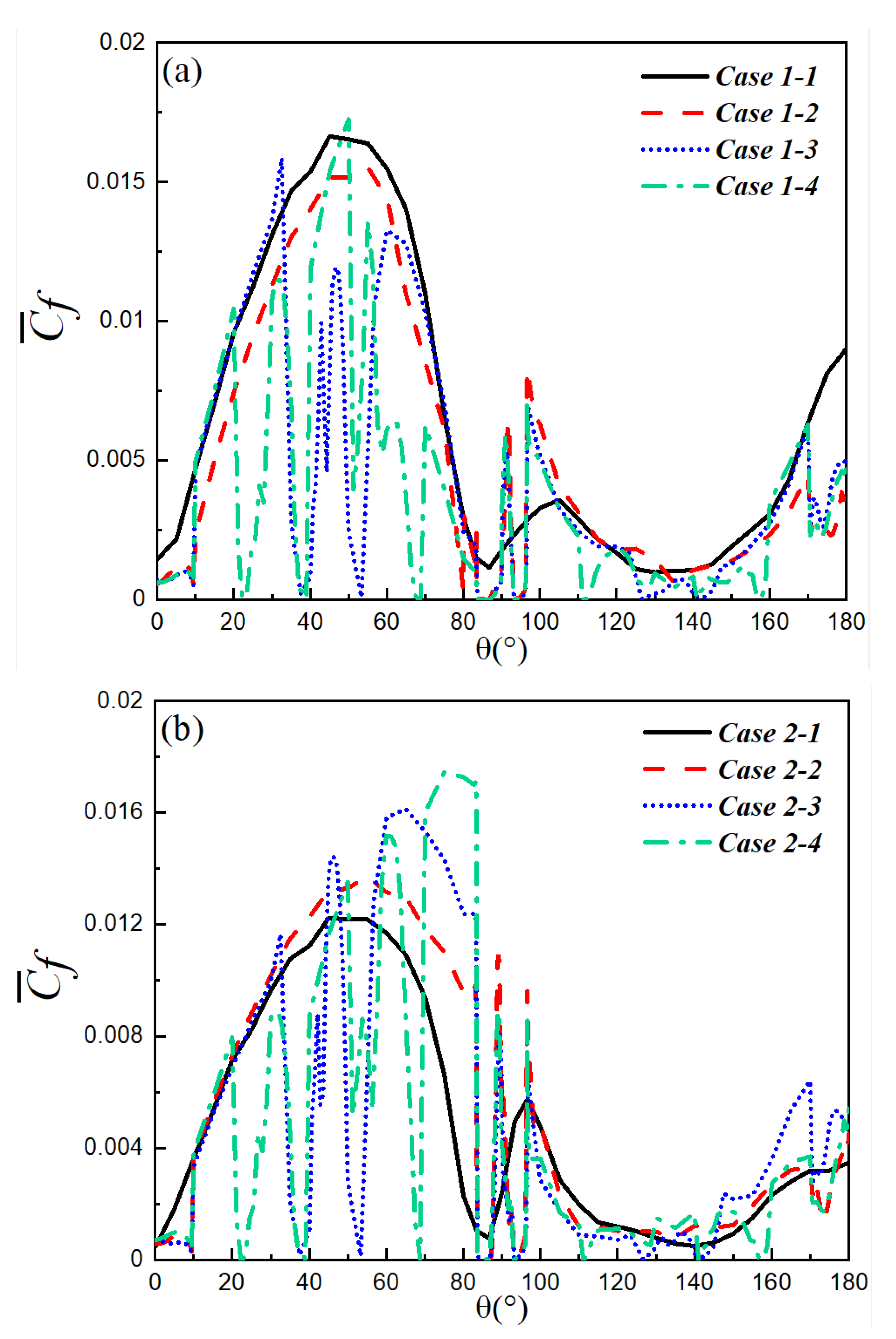
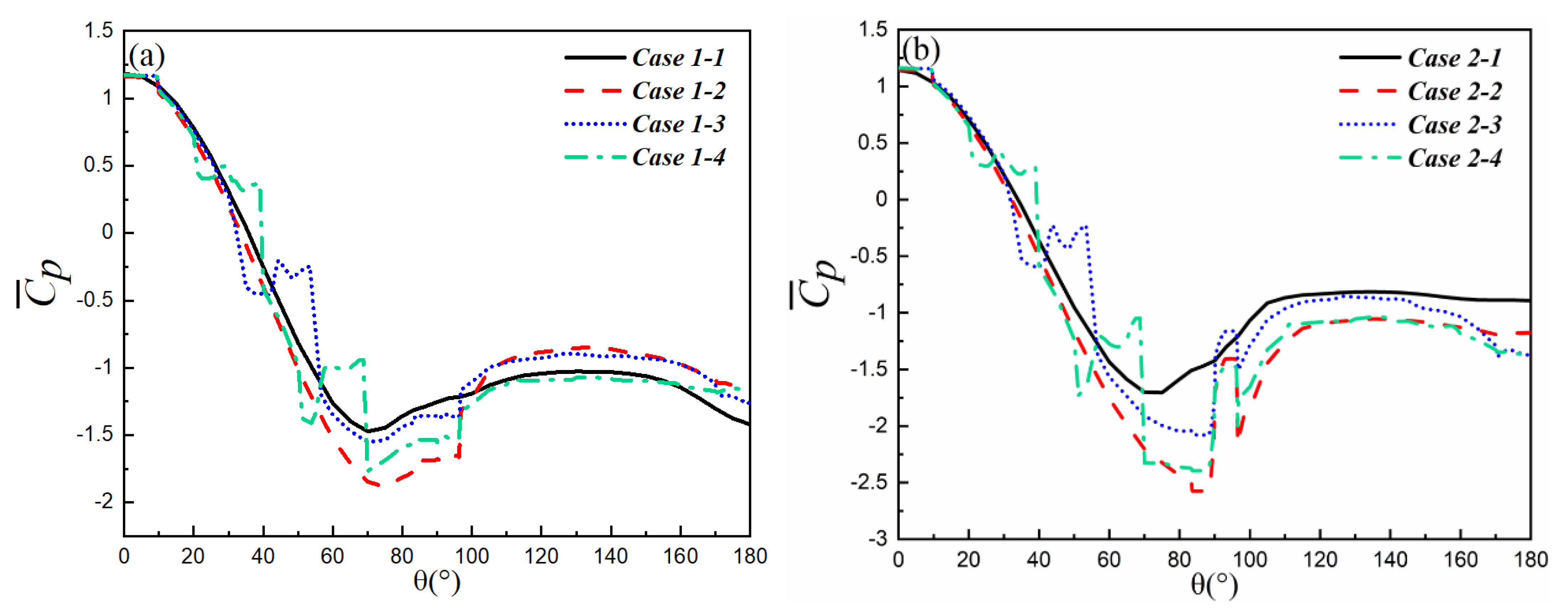
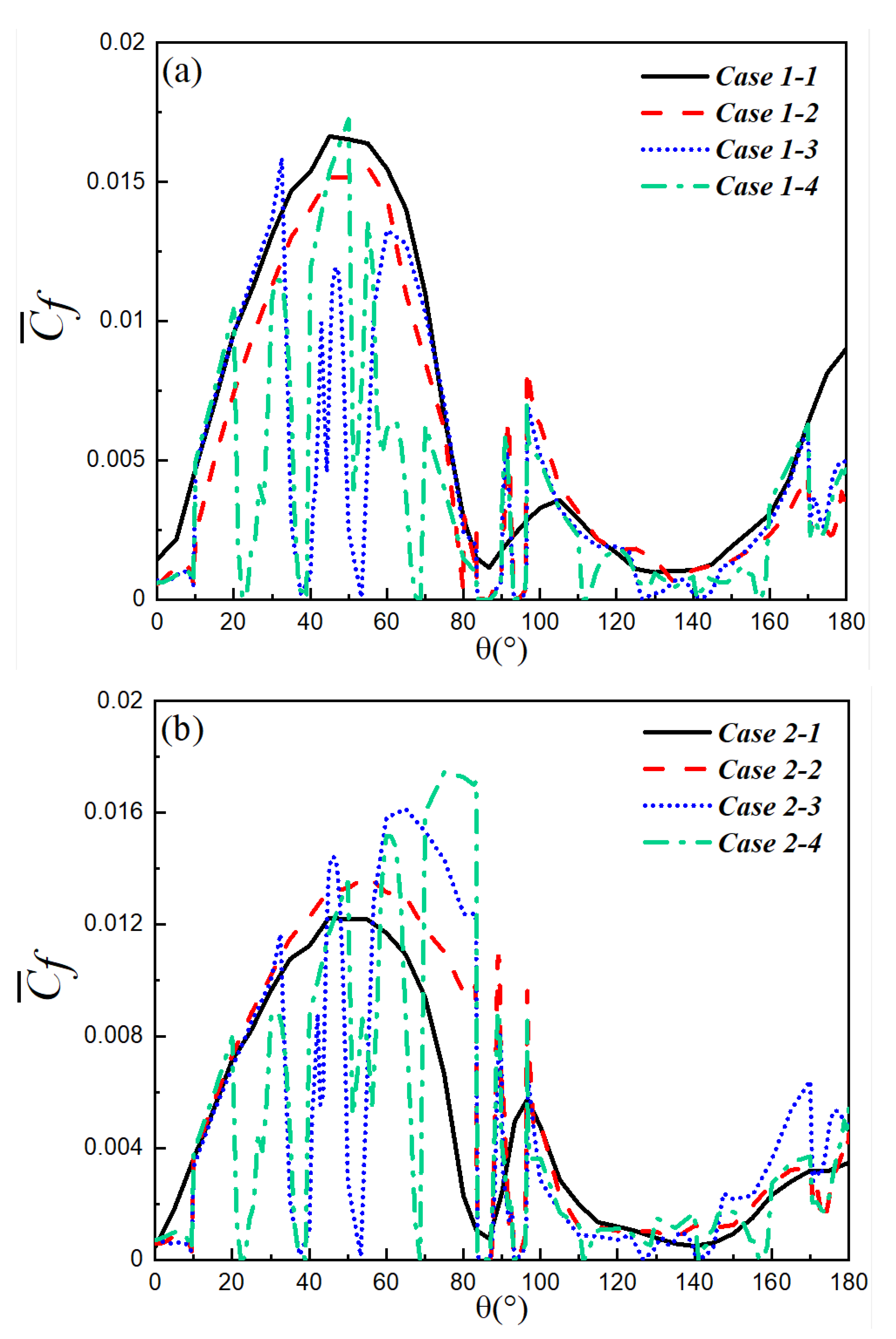
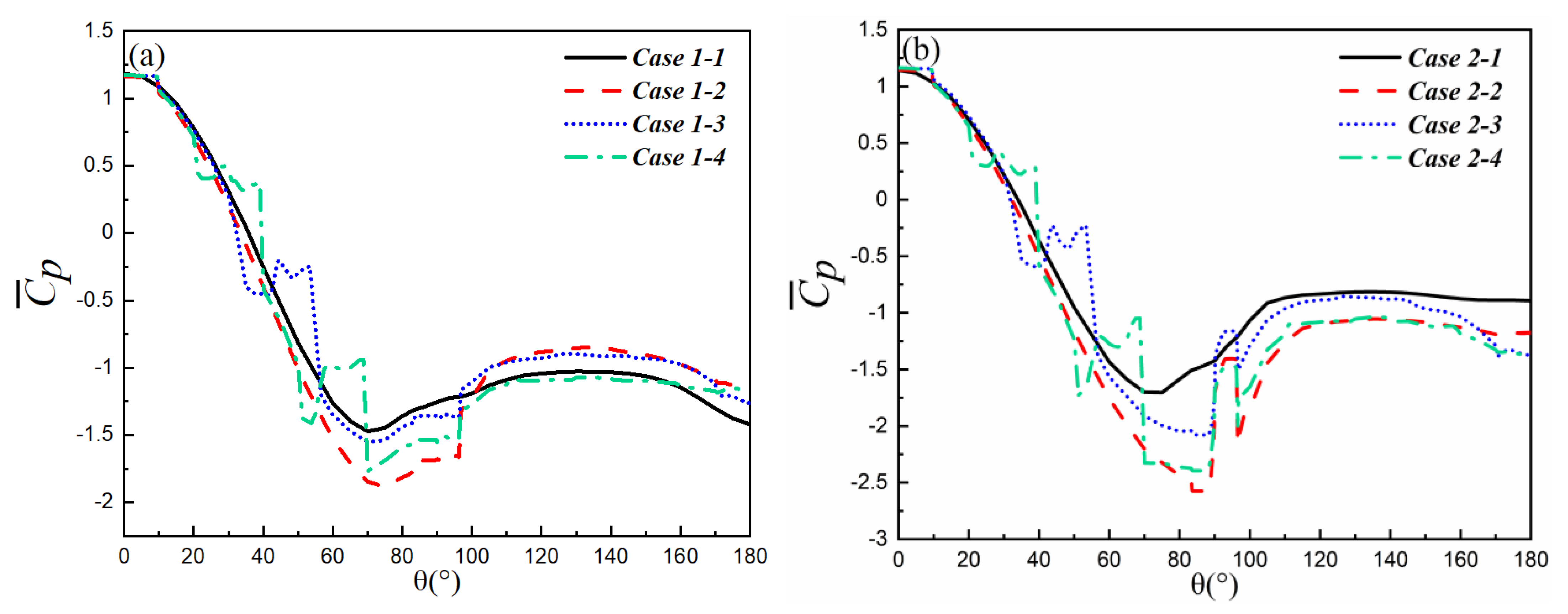
3.2. Pressure Coefficient and Skin Friction Coefficient
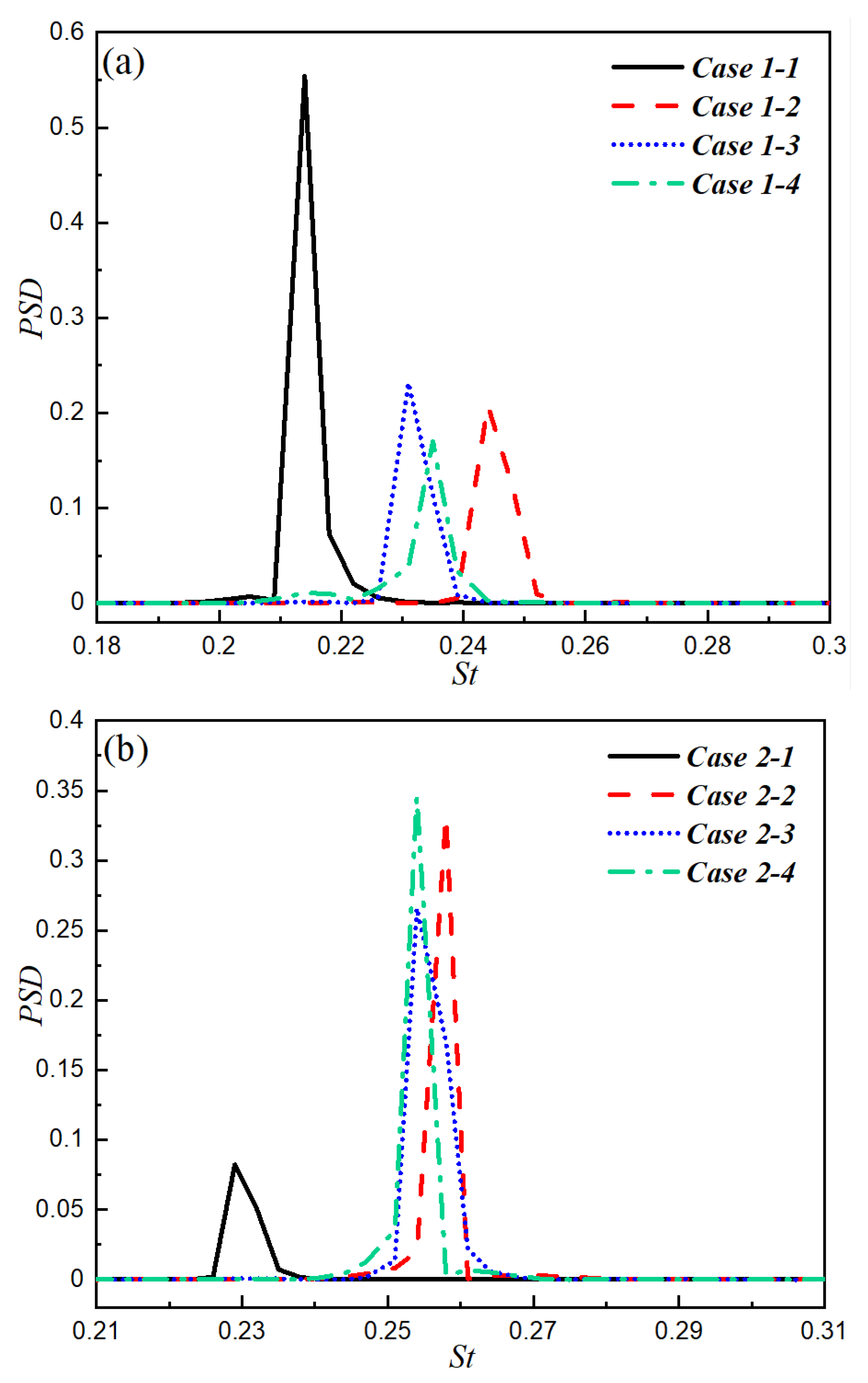
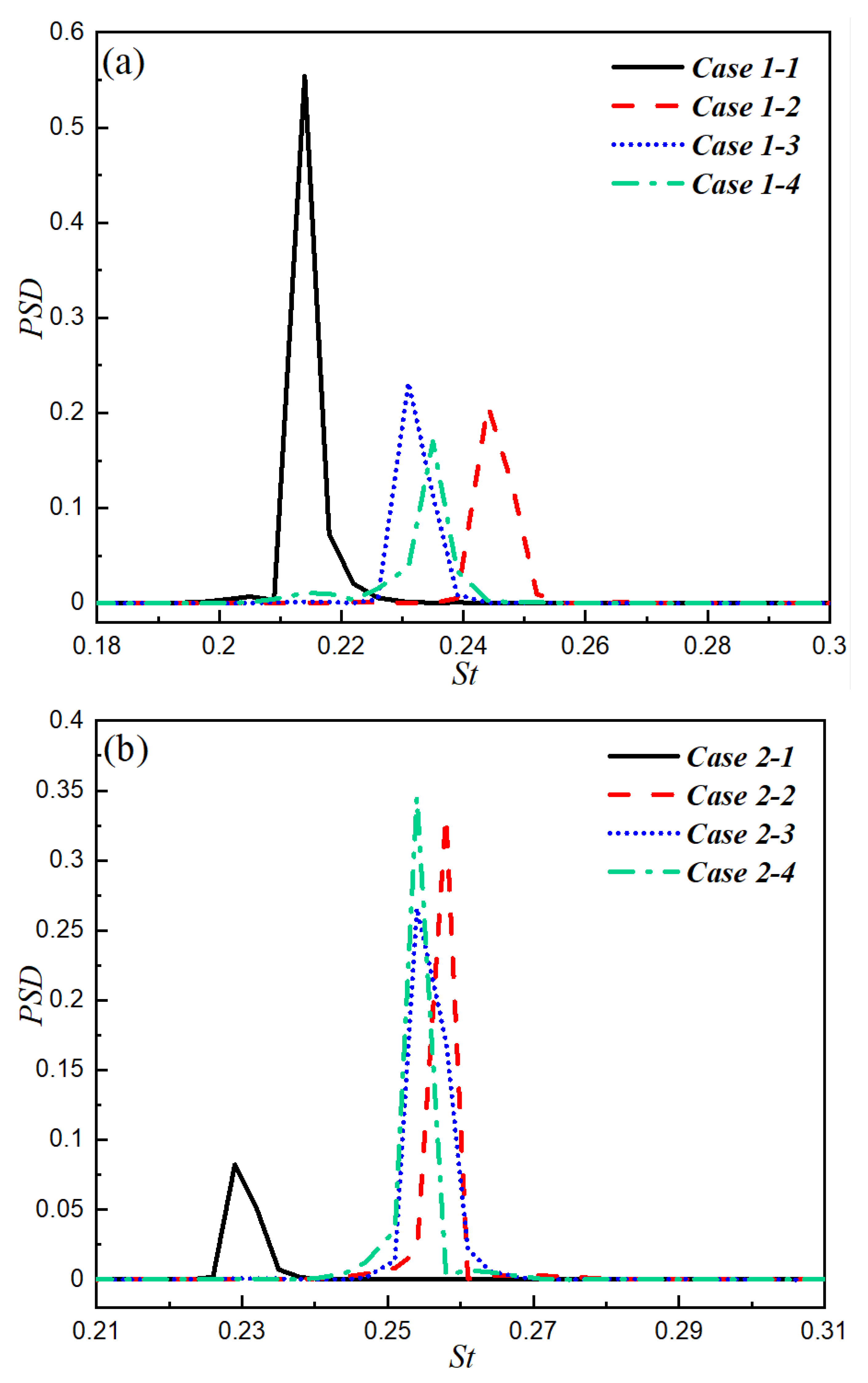
3.3. Vortex Shedding Strength
4. Experimental Results and Discussion
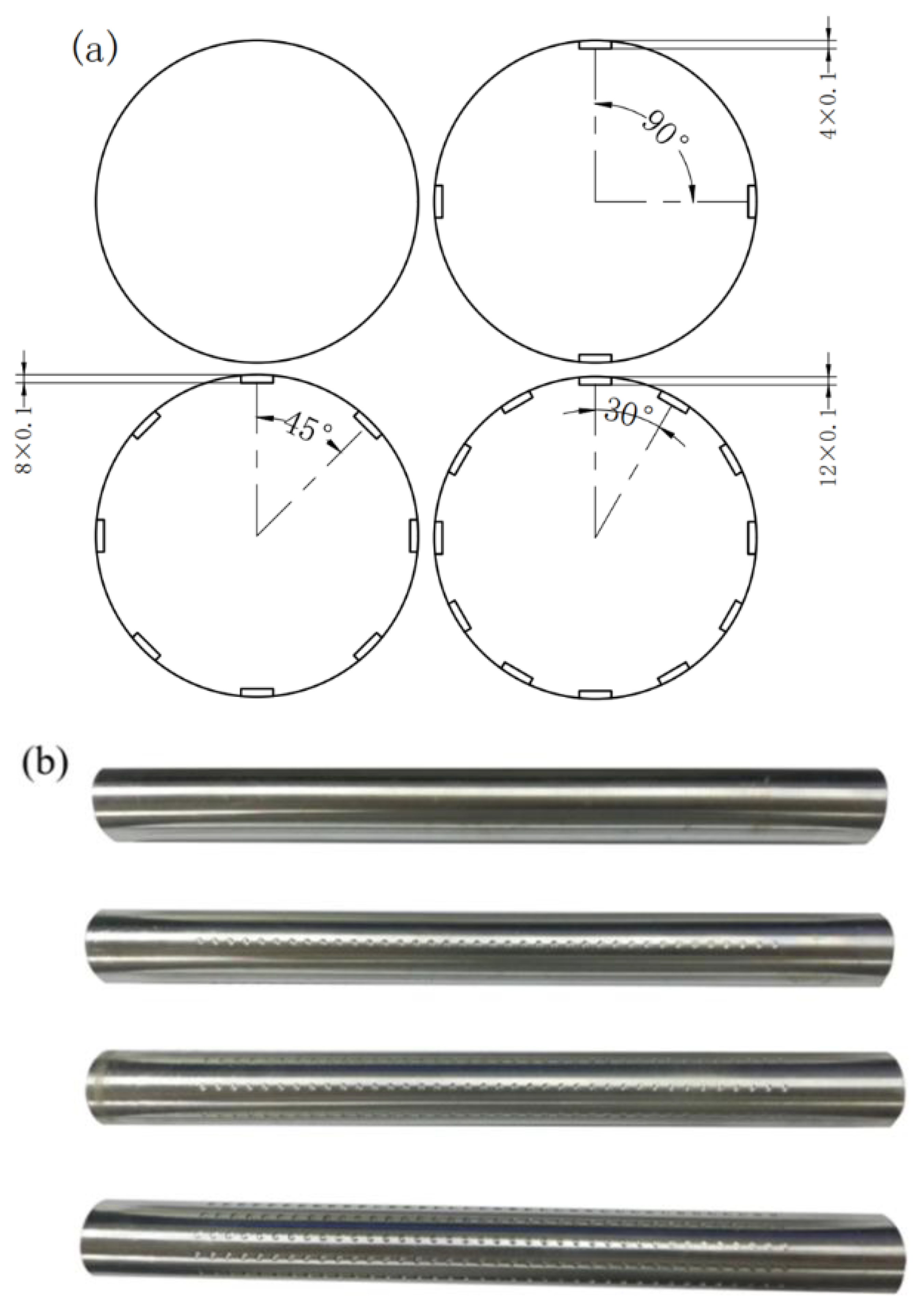
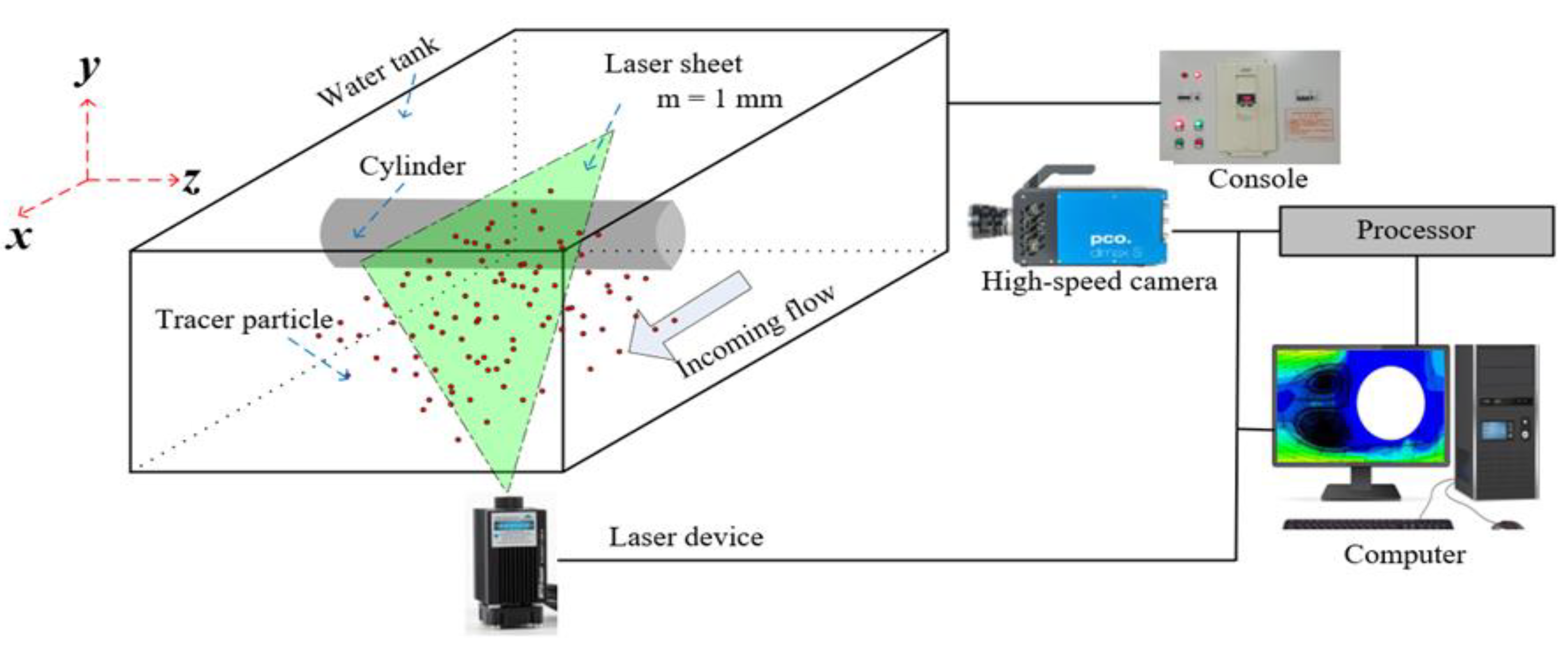
4.1. Experimental Equipment
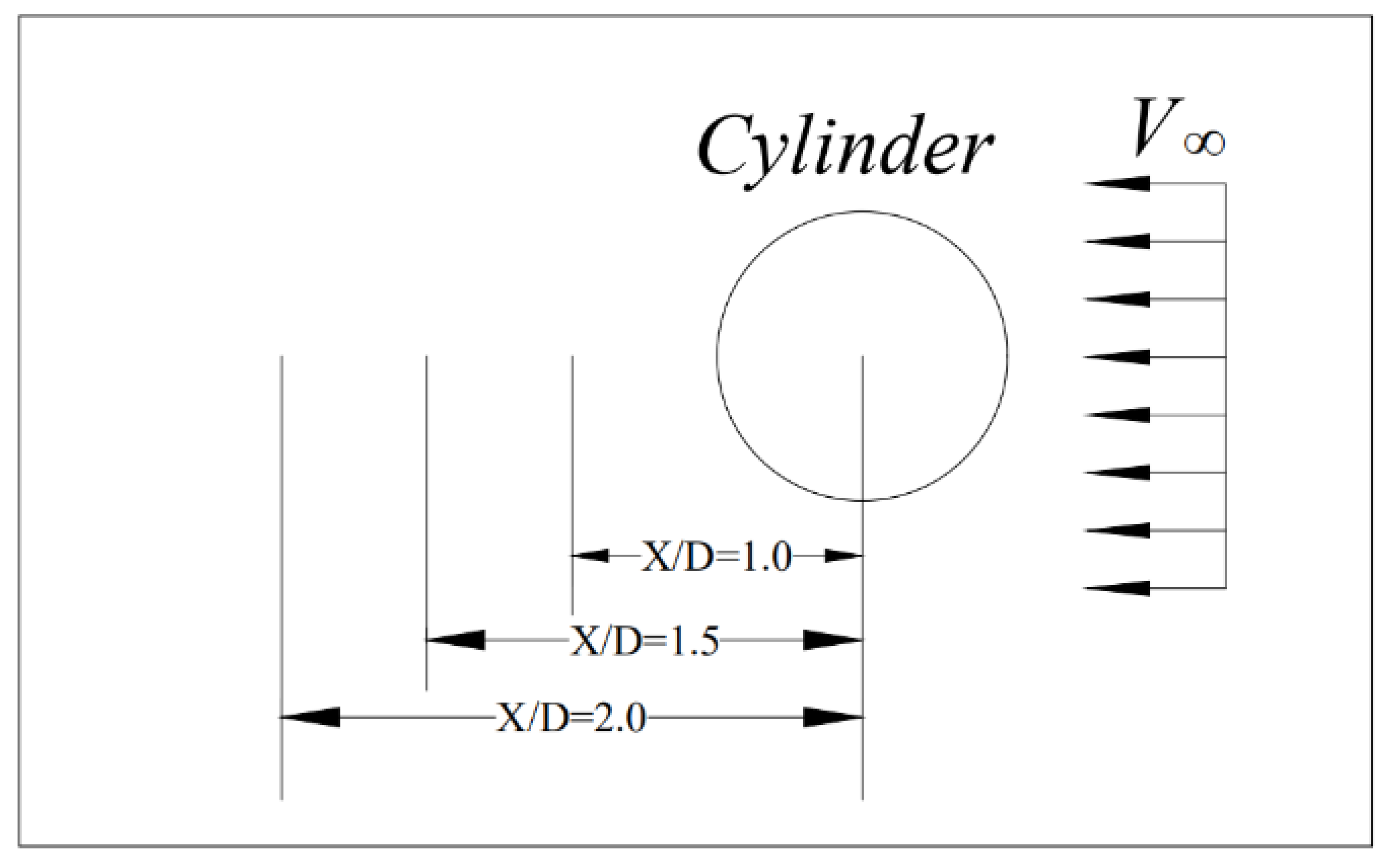
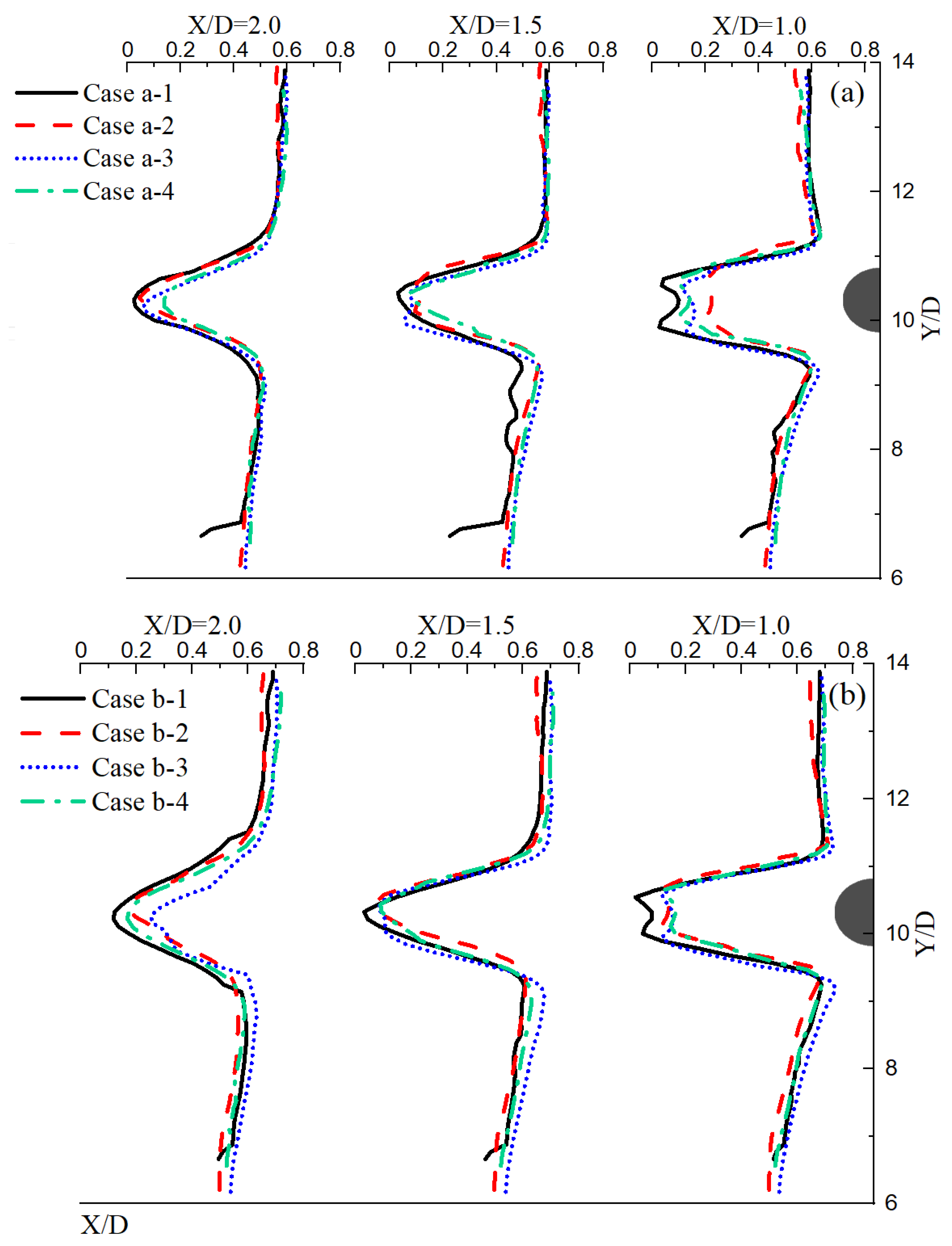
4.2. Velocity Field
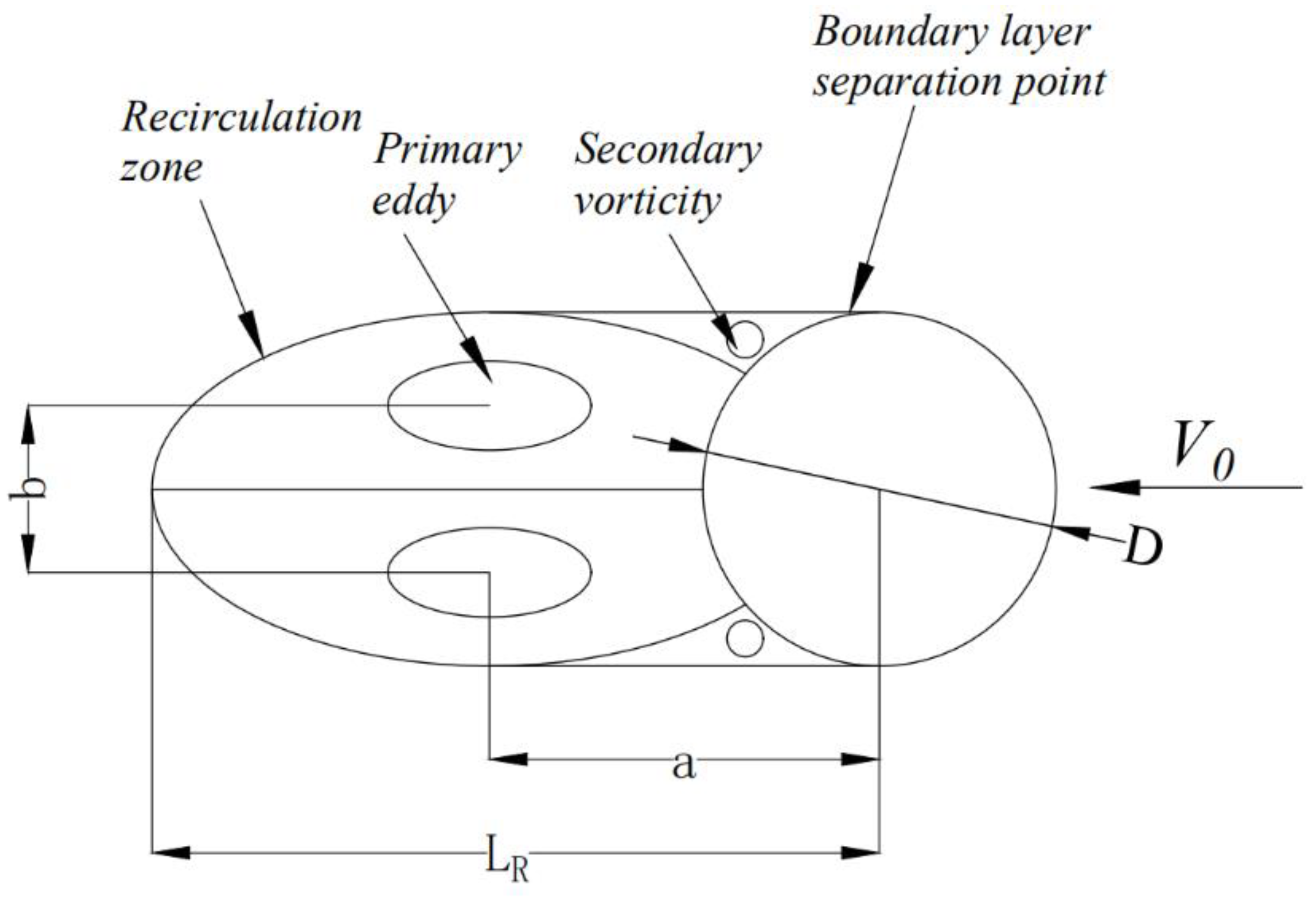
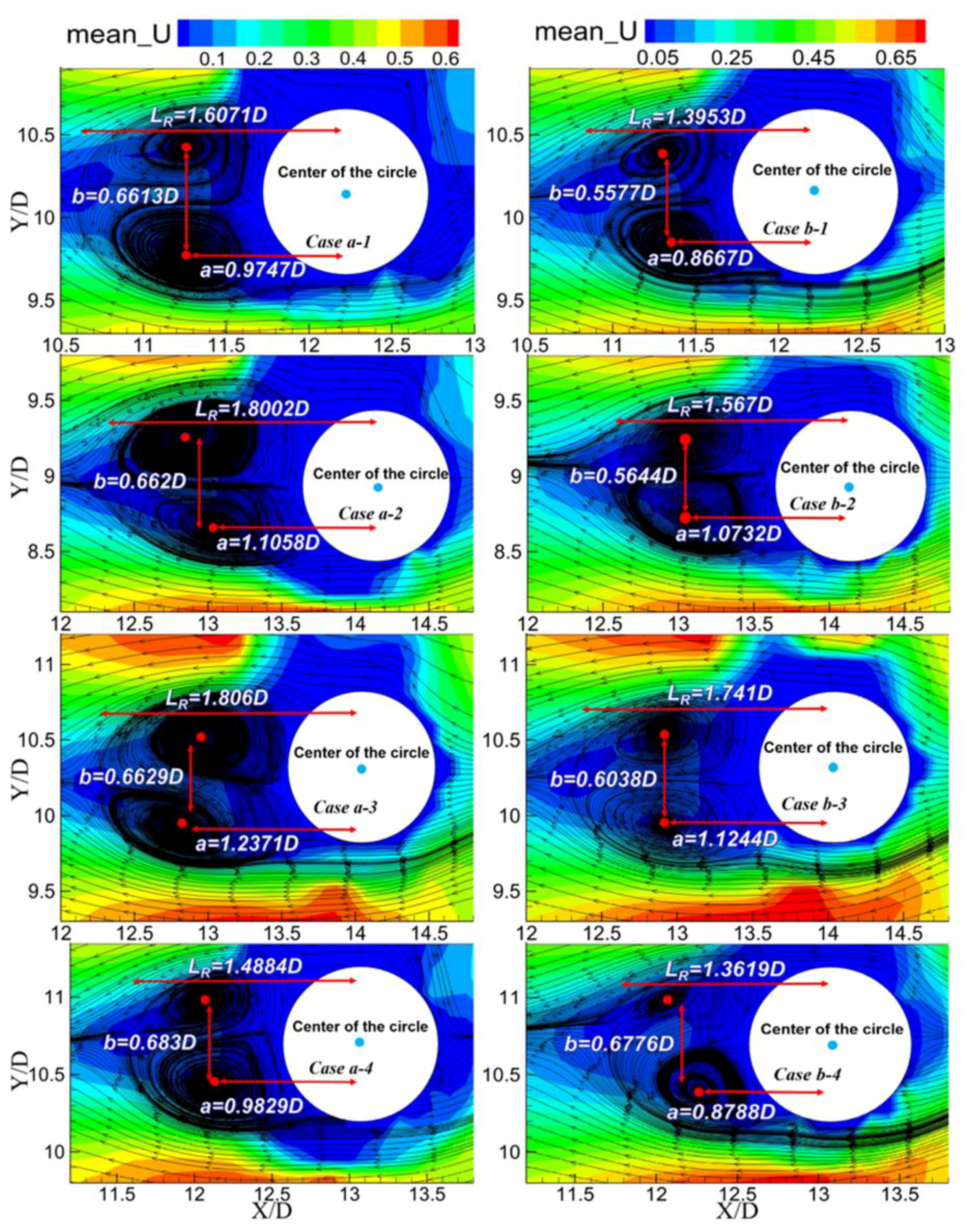
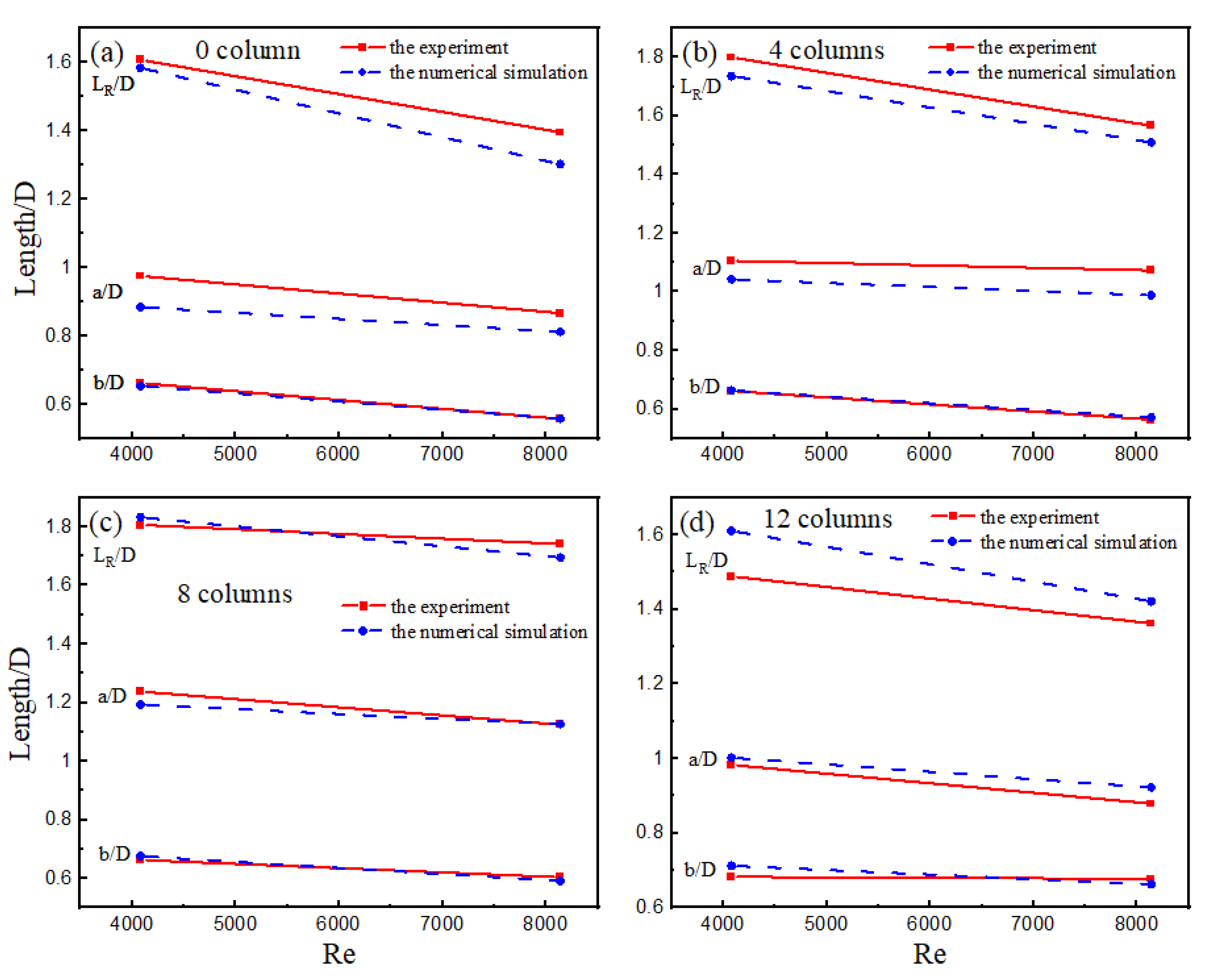
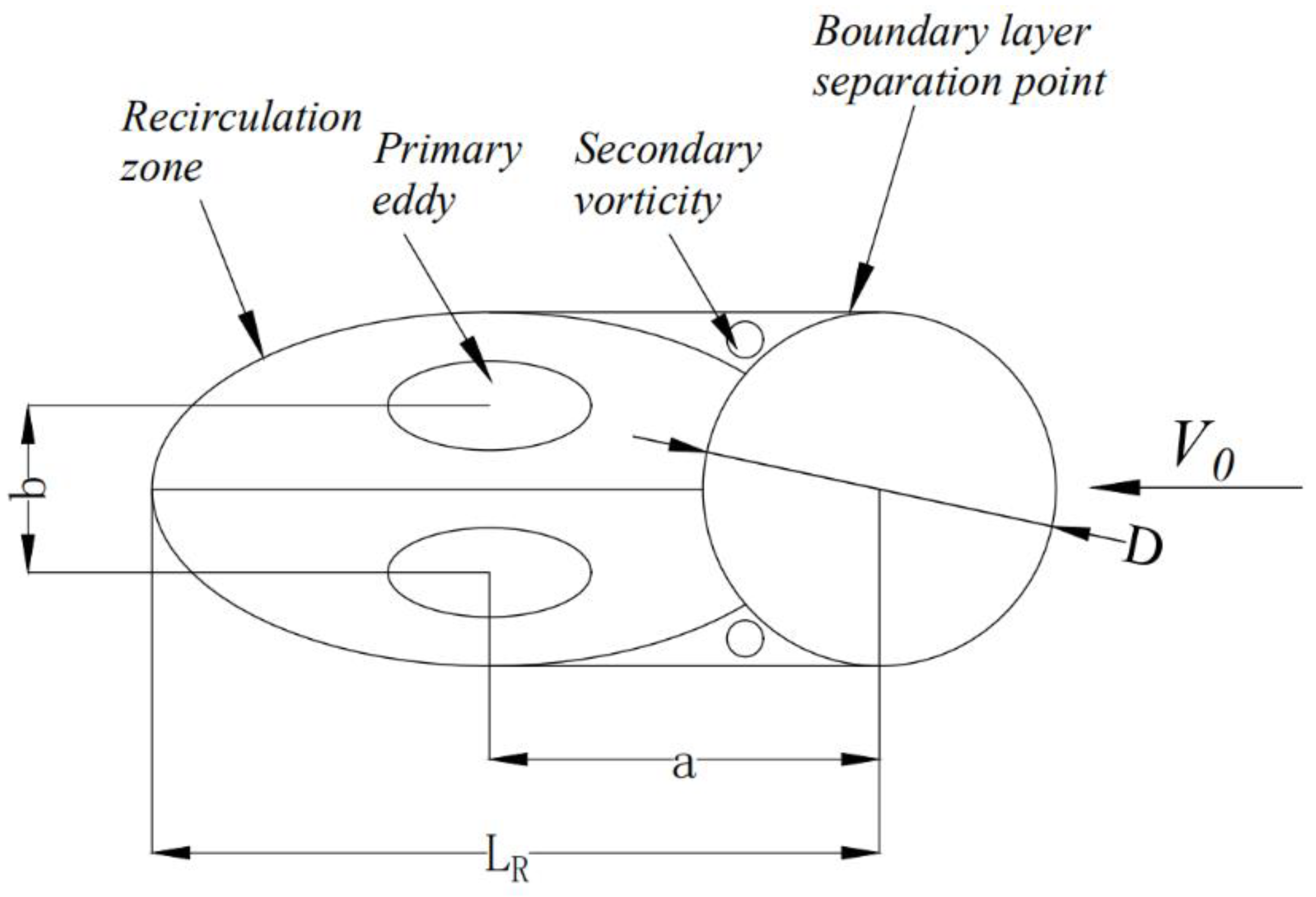
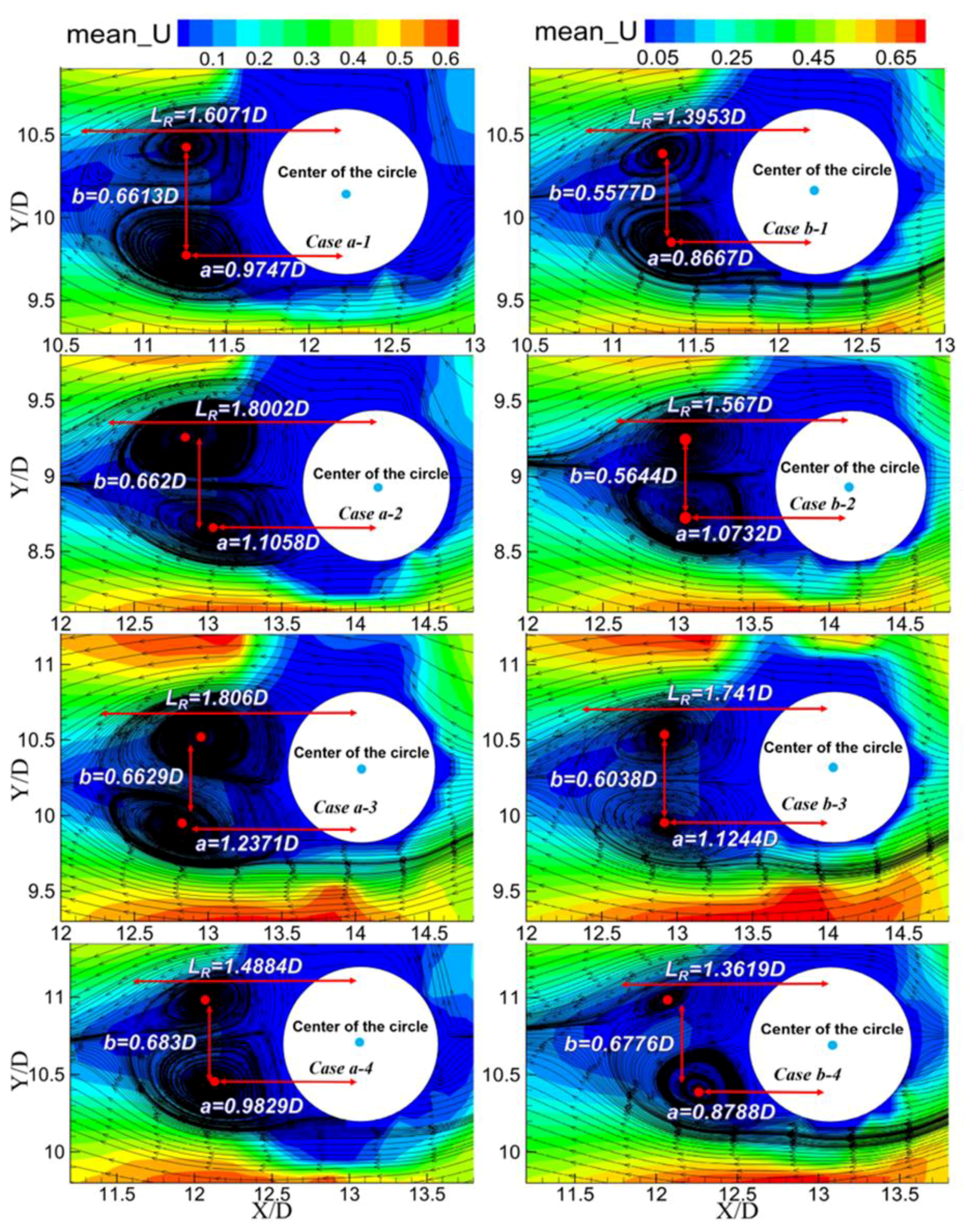
4.3. Vortex Structure
5. Conclusions
- (1)
- The dimple structure can effectively reduce the drag of the cylinder within a specific range of Reynolds numbers. The maximum drag reduction rate reaches 19%. However, the drag reduction rate is reduced to a minimum of 12.16% with the increase in the number of dimples.
- (2)
- In terms of the composition of drag, it is also worth noting that both the pressure drag and the skin friction drag have an essential influence on the total drag of the circular cylinder with the dimpled surface.
- (3)
- When the drag is reduced, the cylinder’s vortex shedding strength is less than that of a smooth cylinder at the same Reynolds number. On the other hand, the drag of the circular cylinder with the dimpled surface will be increased when the flow velocity exceeds a certain critical value and the vortex shedding strength of the cylinders will be more muscular than that of the smooth cylinder.
- (4)
- The velocity recovery of the circular cylinder with the dimpled surface is faster than that of the smooth cylinder, indicating a lower velocity gradient and a lower shearing action in the dimpled structure. At the same time, the increase of Re will weaken the effect of dimples on velocity recovery.
- (5)
- Through discussions of the vortex scale, it is found that when the drag of the cylinder decreases, the values of LR, a, and b will increase. This phenomenon indicates that the release of the vortex is delayed, and the drag of the cylinder is therefore reduced.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muddada, S.; Patnaik, B.S.V. Active flow control of vortex induced vibrations of a circular cylinder subjected to non-harmonic forcing. Ocean Eng. 2017, 142, 62–77. [Google Scholar] [CrossRef]
- Owen, J.C.; Bearman, P.W. Passive control of VIV with drag reduction. J. Fluid Struct. 2001, 15, 597–605. [Google Scholar] [CrossRef]
- Ivo Amilcar, V.C.M.T. Experimental Investigation on Vortex Induced Vibrations of Bio-Cylinders Based on a Harbor Seal Vibrissa. Master’s Thesis, Harbin Institute of Technology, Harbin, China, June 2018. [Google Scholar]
- Wang, F.H.; Jiang, G.D.; Luo, X.L. Experimental investigation on drag reduction of wavy cylinder in cross flow. J. Xi’an Jiaotong Univ. 2006, 40, 93–96. [Google Scholar]
- Mohammadi, A.; Floryan, J.M. Groove optimization for drag reduction. Phys. Fluids 2013, 25, 113601. [Google Scholar] [CrossRef]
- Ge, M.W.; Fang, L.; Liu, Y.Q. Drag reduction of wall bounded incompressible turbulent flow based on active dimples/pimples. J. Hydrodyn. 2017, 29, 261–271. [Google Scholar] [CrossRef]
- Oki, M.; Suehiro, M.; Okanaga, H. Flow around a circular cylinder with and without grooves. Flow Vis. 1992, 327–332. [Google Scholar] [CrossRef]
- Takayama, S.; Aoki, K. Flow characteristics around a rotating grooved circular cylinder with grooved of different depths. J. Vis. 2005, 8, 295–303. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, X.K.; Guo, W. Control of flow past a dimpled circular cylinder. Exp. Therm. Fluid Sci. 2015, 69, 19–26. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, X.K.; Guo, W. Experimental study on flow past a circular cylinder with rough surface. Ocean Eng. 2015, 109, 7–13. [Google Scholar] [CrossRef]
- Wang, G.R.; Liao, C.J.; Hu, G. Numerical simulation analysis and the drag reduction performance investigation on circular cylinder with dimples at subcritical Reynolds number. J. Mech. Strength 2017, 39, 1119–1125. [Google Scholar]
- Lei, J.M.; Tan, Z.M. Numerical simulation for flow around circular cylinder at high Reynolds number based on Transition SST. J. Beijing Univ. Aeronaut. Astronaut. 2017, 43, 207–217. [Google Scholar]
- Shi, S.J.; Huo, J.B.; Zhan, J.Z. Study on airfoil surface flow based on transition model of γ-Reθt. J. Guilin Univ. Aerosp. Technol. 2018, 23, 334–338. [Google Scholar]
- Langtry, R.B.; Menter, F.R. Correlation-based transition modeling for unstructured parallelized computational fluid dynamics codes. AIAA J. 2009, 47, 2894–2906. [Google Scholar] [CrossRef]
- Langtry, R.B.; Menter, F.R.; Likk, S.R. A correlation-based transition model using local variables-part II: Test cases and industrial applications. J. Turbomach. 2006, 128, 423–443. [Google Scholar] [CrossRef]
- Menter, F.R.; Langtry, R.B.; Likk, S.R. A correlation-based transition model using local variables-part I: Model formulation. J. Turbomach. 2006, 128, 413–422. [Google Scholar] [CrossRef]
- Sarker, M.A. Flow measurement around scoured bridge piers using Acoustic-Doppler Velocimeter (ADV). Flow Meas. Instrum. 1998, 9, 217–227. [Google Scholar] [CrossRef]
- Bai, A.P.; Mai, Y.F. Study on dynamic response of self-sustaining conditions of jack-up offshore platform pile leg storm based on ANSYS. China Water Transp. 2017, 7, 162–164. [Google Scholar]
- Wang, Q. Strength and Fatigue Analysis of Jack-Up Platform Leg. Master’s Thesis, Harbin Engineering University, Harbin, China, May 2013. [Google Scholar]
- Xu, J.H. The Research of Jack-Up Platforms in the Dynamic Response and Fatigue Analysis. Master’s Thesis, South China University of Technology, Guangzhou, China, June 2014. [Google Scholar]
- Guo, X.Y. Research on the Adaptability of Working Water Depth of Jack-Up Platform Leg Structure Type. Master’s Thesis, Dalian University of Technology, Dalian, China, May 2017. [Google Scholar]
- Fang, Y. Study on Drag Reduction of Revolution Body with Dimple and Convex Tubercle. Master’s Thesis, Beijing Jiaotong University, Beijing, China, July 2012. [Google Scholar]
- Gu, Y.Q.; Zhao, G.; Zheng, J.X.; Li, Z.; Liu, W.; Muhammad, F. Experimental and numerical investigation on drag reduction of non-smooth bionic jet surface. Ocean Eng. 2014, 81, 50–57. [Google Scholar] [CrossRef]
- Zhao, J. Study of Drag Reduction Capability of the Dimple Bionic Non-Smooth Surface. Master’s Thesis, Dalian University of Technology, Dalian, China, December 2008. [Google Scholar]
- Chen, J.T. 2D numerical simulation and wake analysis on flow around circular cylinder. Comput. Aided Eng. 2013, 22, 1–6. [Google Scholar]
- Zhu, H.J.; Zhou, T.M. Flow around a circular cylinder attached with a pair of fin-shaped strips. Ocean Eng. 2019, 190, 106–484. [Google Scholar] [CrossRef]
- Schewe, G. On the force fluctuations acting on a circular cylinder in crossflow from subcritical up to transcritical Reynolds numbers. J. Fluid Mech 1983, 133, 265–285. [Google Scholar] [CrossRef]
- Zdravkovich, M.M. Review and classification of various aerodynamic and hydrodynamic means for suppressing vortex shedding. J. Wind Eng. Ind. Aerodyn. 1981, 7, 145–189. [Google Scholar] [CrossRef]
- Achenbach, E. Distribution of local pressure and skin friction around a circular cylinder in cross-flow up to Re = 5 × 106. J. Fluid Mech. 1968, 34, 625–639. [Google Scholar] [CrossRef]
- Sumer, B.M.; FredsØe, J. Hydrodynamics around Cylindrical Structures; World Scientific: Singapore, 1997. [Google Scholar]
- Alonzo-GarcÍa, A. RANS simulations of the U and V grooves effect in the subcritical flow over four rotated circular cylinders. J. Hydrodyn. Ser. B 2015, 27, 569–578. [Google Scholar] [CrossRef]
- Bracewell, R.N. The Fourier Transform and Its Applications; McGraw-Hill: New York, NY, USA, 1986. [Google Scholar]
- Yokoi, Y.; Igarashi, T.; Hirao, K. The study about drag reduction of a circular cylinder with grooves. J. Fluid Sci. Technol. 2011, 6, 637–650. [Google Scholar] [CrossRef]
- Szepessy, S.; Bearman, P.W. Aspect ratio and end plate effects on vortex shedding from a circular cylinder. J. Fluid Mech. 1992, 234, 191–217. [Google Scholar] [CrossRef]
- Aguedal, L.; Semmar, D.; Berrouk, A.S.; Azzi, A.; Oualli, H. 3D vortex structure investigation using large eddy simulation of flow around a rotary oscillating circular cylinder. Eur. J. Mech.-B/Fluids 2018, 71, 113–125. [Google Scholar] [CrossRef]
- Baek, H.; Karniadakis, G.E. Suppressing vortex-induced vibrations via passive means. J. Fluids Struct. 2009, 25, 848–866. [Google Scholar] [CrossRef]
- El-Makdah, A.M.; Oweis, G.F. The flow past a cactus-inspired grooved cylinder. Exp. Fluids 2013, 54, 1464. [Google Scholar] [CrossRef]
- Tonui, N.; Sumner, D. Temporal development of the wake of a non-impulsively started circular cylinder. In Proceedings of the ASME Fluids Engineering Division Summer Meeting, Vail, CO, USA, 2–6 August 2009. [Google Scholar]
- Liu, Y.Z.; Shi, L.L.; Yu, J. TR-PIV measurement of the wake behind a grooved cylinder at low Reynolds number. J. Fluids Struct. 2011, 27, 394–407. [Google Scholar] [CrossRef]
- Babu, P.; Mahesh, K. Aerodynamic loads on cactus-shaped cylinders at low Reynolds numbers. Phys. Fluids 2008, 20, 035112. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
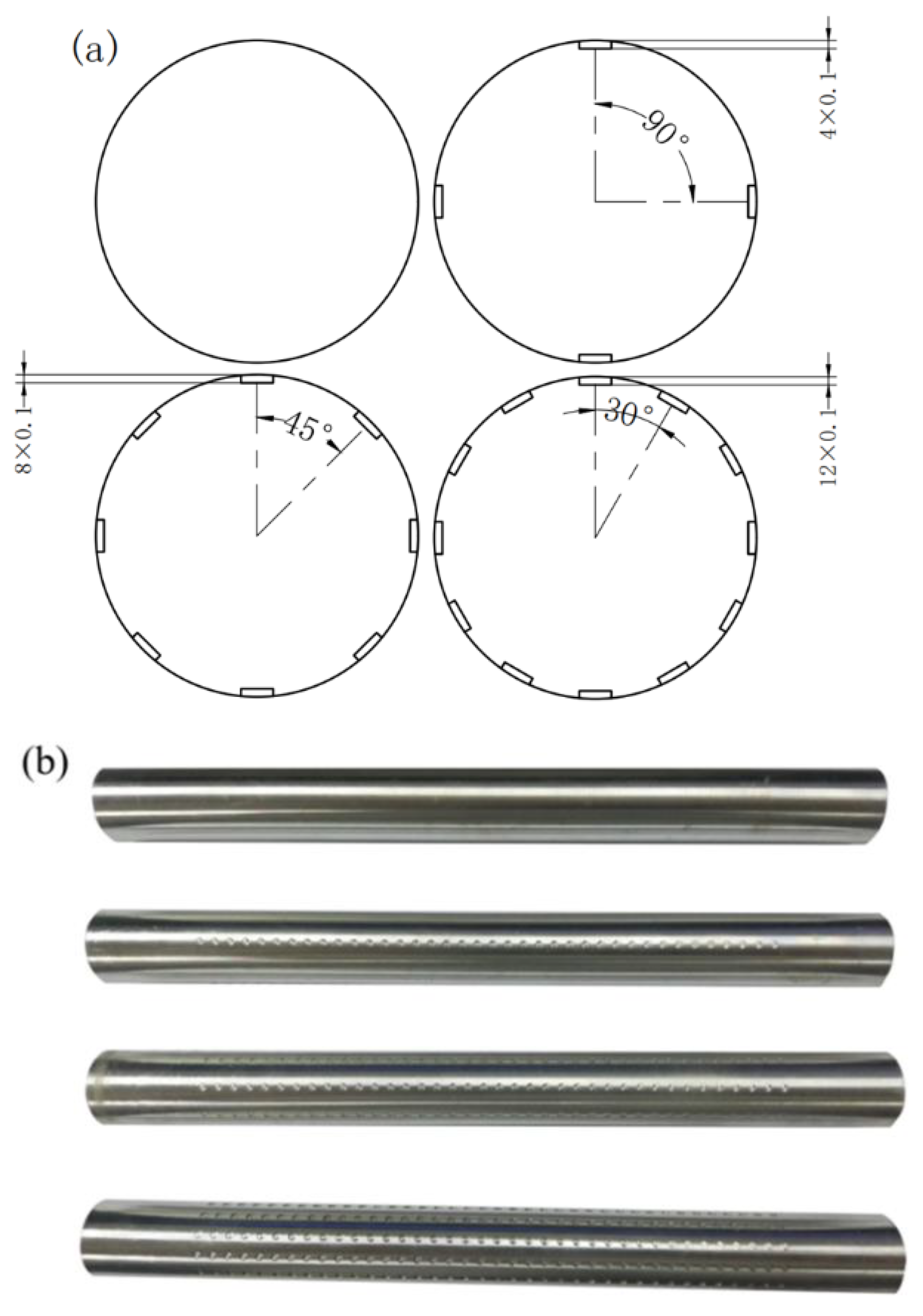
| Number of Columns | Re1 = 1 × 105 | Re2 = 2 × 105 |
|---|---|---|
| 0 column | Case 1-1 | Case 2-1 |
| 4 columns | Case 1-2 | Case 2-2 |
| 8 columns | Case 1-3 | Case 2-3 |
| 12 columns | Case 1-4 | Case 2-4 |
| Mesh | Description | Number of Cells | Time-Averaged Drag Coefficient | Root Mean Square of Lift Coefficient (Clrms) | Strouhal Number (St) | |
|---|---|---|---|---|---|---|
| M1 | The first layer height 0.00005D | Mesh expansion ratio of 1.3 | 72,936 | 1.4001 | 0.7492 | 0.2337 |
| M2 | Mesh expansion ratio of 1.2 | 89,476 | 1.3129 | 0.6391 | 0.2212 | |
| M3 | Mesh expansion ratio of 1.1 | 107,116 | 1.2424 | 0.6217 | 0.2137 | |
| M4 | Mesh expansion ratio of 1.05 | 125,856 | 1.2418 | 0.6214 | 0.2130 | |
| Mesh | Description | Number of Cells | Time-Averaged Drag Coefficient | Root Mean Square of Lift Coefficient (Clrms) | Strouhal Number (St) | |
|---|---|---|---|---|---|---|
| M1′ | the first layer height 0.00005Ddensify 40 layers mesh for the location with dimples | Mesh expansion ratio of 1.3 | 96,988 | 1.3412 | 0.7115 | 0.2214 |
| M2′ | Mesh expansion ratio of 1.2 | 105,462 | 1.2584 | 0.7073 | 0.2206 | |
| M3′ | Mesh expansion ratio of 1.1 | 110,302 | 1.0060 | 0.6131 | 0.2010 | |
| M4′ | Mesh expansion ratio of 1.05 | 131,214 | 1.0052 | 0.6114 | 0.2005 | |
| Source of Literature | St | Note | |
|---|---|---|---|
| Schewe | 1.18 | 0.21 | experiment |
| Zdravkovich | 1.2 | 0.20 | experiment |
| This paper | 1.24 | 0.22 | simulation |
| The Parameters | Choices | Notes |
|---|---|---|
| Solver | Pressure-Based, Transient | |
| Model | Transition-SST | |
| The fluid medium | Water-liquid (20°) | ρ = 998.2 kg/m3 μ = 0.001003 kg/(m·−s) |
| The boundary conditions | Velocity-Inlet & Pressure-Outlet | |
| Pressure-Velocity Coupling Scheme | SIMPLEC | |
| Spatial Discretization | Second Order Upwind |
| Serial Number | Remark | η | |
|---|---|---|---|
| 1 | Case 1-1 | 1.242 | |
| 2 | Case 1-2 | 1.006 | +19.00% |
| 3 | Case 1-3 | 1.088 | +12.40% |
| 4 | Case 1-4 | 1.091 | +12.16% |
| 5 | Case 2-1 | 0.898 | |
| 6 | Case 2-2 | 0.931 | −3.67% |
| 7 | Case 2-3 | 1.060 | −18.04% |
| 8 | Case 2-4 | 1.080 | −20.27% |
| Q (m3/h) | S (m2) | V∞ (m/s) | Re |
|---|---|---|---|
| 55 | 0.075 | 0.204 | 4.08 × 103 |
| 110 | 0.407 | 8.14 × 103 |
| Number of Columns | Re1 = 4.08 × 103 | Re2 = 8.14 × 103 |
|---|---|---|
| 0 column | Case a-1 | Case b-1 |
| 4 columns | Case a-2 | Case b-2 |
| 8 columns | Case a-3 | Case b-3 |
| 12 columns | Case a-4 | Case b-4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, F.; Yang, H.; Wang, L. Study of the Drag Reduction Characteristics of Circular Cylinder with Dimpled Surface. Water 2021, 13, 197. https://doi.org/10.3390/w13020197
Yan F, Yang H, Wang L. Study of the Drag Reduction Characteristics of Circular Cylinder with Dimpled Surface. Water. 2021; 13(2):197. https://doi.org/10.3390/w13020197
Chicago/Turabian StyleYan, Fei, Haifeng Yang, and Lihui Wang. 2021. "Study of the Drag Reduction Characteristics of Circular Cylinder with Dimpled Surface" Water 13, no. 2: 197. https://doi.org/10.3390/w13020197
APA StyleYan, F., Yang, H., & Wang, L. (2021). Study of the Drag Reduction Characteristics of Circular Cylinder with Dimpled Surface. Water, 13(2), 197. https://doi.org/10.3390/w13020197