
Graph Convolutional Networks: Application to Database Completion of Wastewater Networks

 , ,
, ,
Abstract
1. Introduction
2. Background and State of the Art
2.1. Machine Learning and Graphs
2.2. Graph Embedding
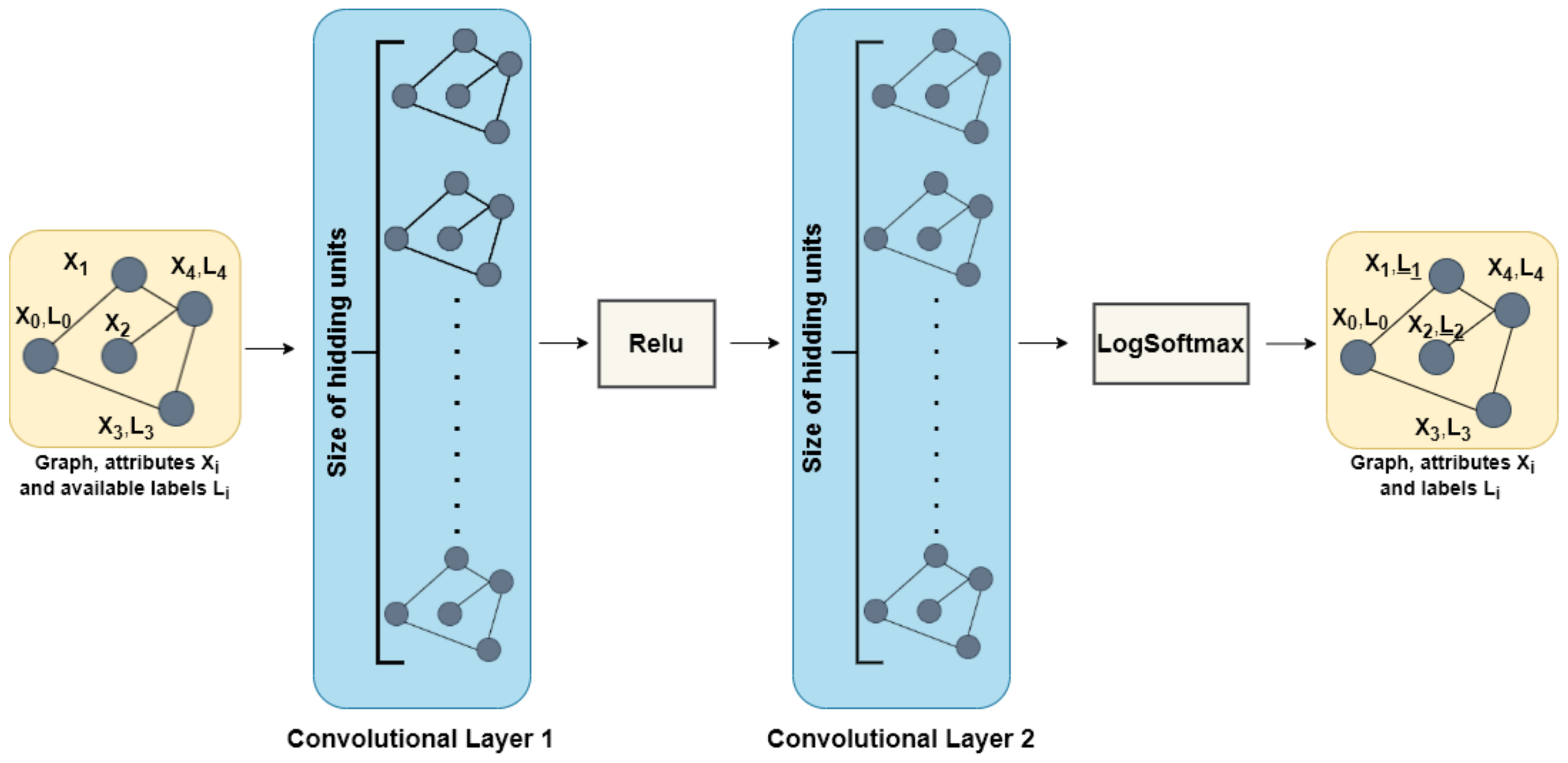
2.3. Graph Neural Networks
2.4. GCN for Semi-Supervised Learning
3. Materials and Methods
3.1. Models and Test Configurations
- Configuration 1: The network graph, a portion of the values of the targeted attribute, and domain knowledge are provided.
- Configuration 2: The network graph, a portion of the values of the targeted attribute, domain knowledge, and other fields of the attribute table are provided.
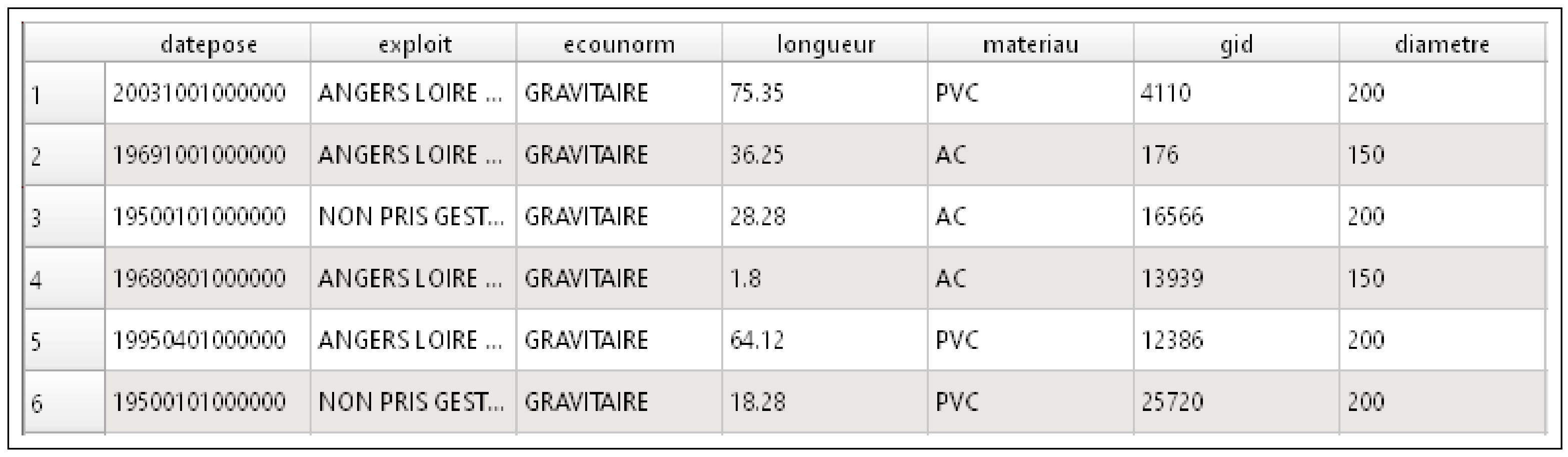
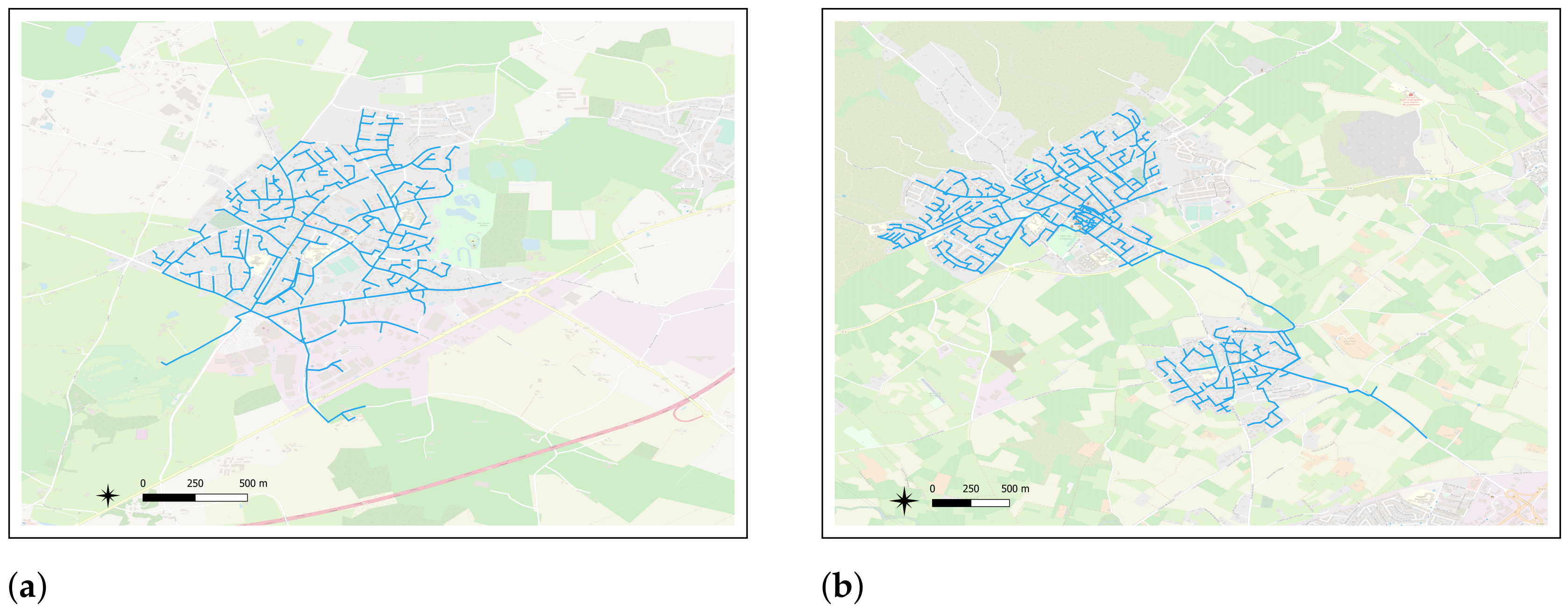
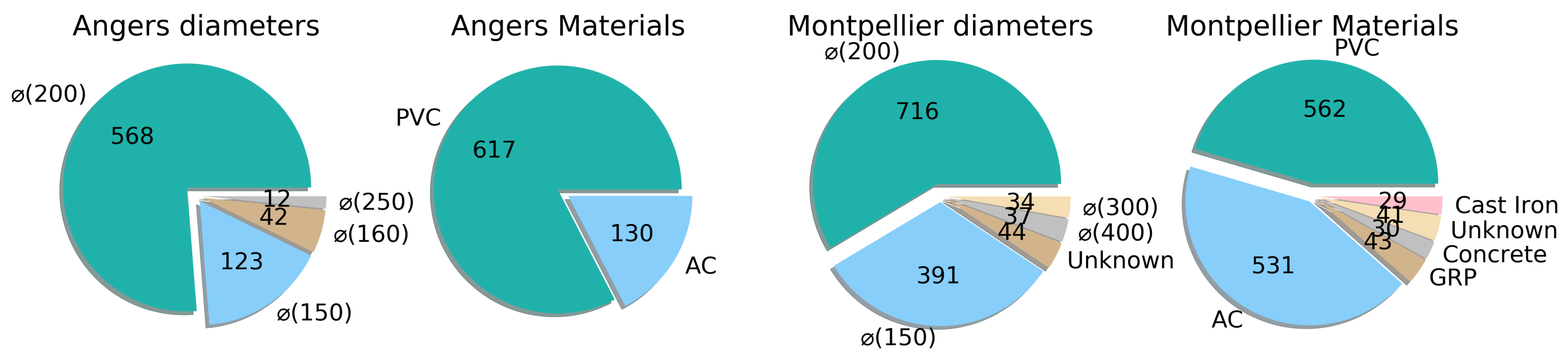
3.2. Datasets
3.3. Testing Procedure
4. Experimental Results
4.1. Configuration 1
4.2. Configuration 2
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- UN. Population Division of the Department of Economic and Social Affairs of the United Nations: World Urbanization Prospects: The 2018 Revision; Technical Report (ST/ESA/SER.A/420); UN: New York, NY, USA, 2019. [Google Scholar]
- OECD. OECD Environmental Outlook to 2050: The Consequences of Inaction; OECD Editions: Paris, France, 2012; p. 350. [Google Scholar] [CrossRef]
- Yuan, Z.; Olsson, G.; Cardell-Oliver, R.; van Schagen, K.; Marchi, A.; Deletic, A.; Urich, C.; Rauch, W.; Liu, Y.; Jiang, G. Sweating the assets—The role of instrumentation, control and automation in urban water systems. Water Res. 2019, 155, 381–402. [Google Scholar] [CrossRef]
- Harrison, C.; Eckman, B.; Hamilton, R.; Hartswick, P.; Kalagnanam, J.; Paraszczak, J.; Williams, P. Foundations for Smarter Cities. IBM J. Res. Dev. 2010, 54, 1–16. [Google Scholar] [CrossRef]
- Nie, X.; Fan, T.; Wang, B.; Li, Z.; Shankar, A.; Manickam, A. Big Data analytics and IoT in Operation safety management in Under Water Management. Comput. Commun. 2020, 154, 188–196. [Google Scholar] [CrossRef]
- Chen, Y.; Han, D. Water quality monitoring in smart city: A pilot project. Autom. Constr. 2018, 89, 307–316. [Google Scholar] [CrossRef]
- Kofinas, D.T.; Spyropoulou, A.; Laspidou, C.S. A methodology for synthetic household water consumption data generation. Environ. Model. Softw. 2018, 100, 48–66. [Google Scholar] [CrossRef]
- Zeng, Z.; Yuan, X.; Liang, J.; Li, Y. Designing and implementing an SWMM-based web service framework to provide decision support for real-time urban stormwater management. Environ. Model. Softw. 2021, 135, 104887. [Google Scholar] [CrossRef]
- Gibert, K.; Sànchez-Marrè, M.; Rodríguez-Roda, I. GESCONDA: An intelligent data analysis system for knowledge discovery and management in environmental databases. Environ. Model. Softw. 2006, 21, 115–120. [Google Scholar] [CrossRef]
- Lin, P.; Yuan, X.X. A two-time-scale point process model of water main breaks for infrastructure asset management. Water Res. 2019, 150, 296–309. [Google Scholar] [CrossRef]
- Junninen, H.; Niska, H.; Tuppurainen, K.; Ruuskanen, J.; Kolehmainen, M. Methods for imputation of missing values in air quality data sets. Atmos. Environ. 2004, 38, 2895–2907. [Google Scholar] [CrossRef]
- Schneider, T. Analysis of incomplete climate data: Estimation of Mean Values and covariance matrices and imputation of Missing values. J. Clim. 2001, 14, 853–871. [Google Scholar] [CrossRef]
- ASTEE. Gestion Patrimoniale des Réseaux D’assainissement; ASTEE: Nanterre, France, 2015. [Google Scholar]
- Chen, H.; Cohn, A.G. Buried utility pipeline mapping based on multiple spatial data sources: A Bayesian data fusion approach. In Twenty-Second International Joint Conference on Artificial Intelligence; IJCAI: Barcelona, Catalonia, Spain, 2011; pp. 2411–2417. ISBN 978-1-57735-516-8. [Google Scholar]
- Bilal, M.; Khan, W.; Muggleton, J.; Rustighi, E.; Jenks, H.; Pennock, S.R.; Atkins, P.R.; Cohn, A. Inferring the most probable maps of underground utilities using Bayesian mapping model. J. Appl. Geophys. 2018, 150, 52–66. [Google Scholar] [CrossRef]
- Hafsi, M.; Bolon, P.; Dapoigny, R. Detection and localization of underground networks by fusion of electromagnetic signal and GPR images. In Proceedings SPIE 10338, Thirteenth International Conference on Quality Control by Artificial Vision 2017, Tokyo, Japan; Nagahara, H., Umeda, K., Yamashita, A., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10338, pp. 7–14. [Google Scholar] [CrossRef]
- Commandre, B.; En-Nejjary, D.; Pibre, L.; Chaumont, M.; Delenne, C.; Chahinian, N. Manhole Cover Localization in Aerial Images with a Deep Learning Approach. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42W1, 333–338. [Google Scholar] [CrossRef]
- Kabir, G.; Tesfamariam, S.; Hemsing, J.; Sadiq, R. Handling incomplete and missing data in water network database using imputation methods. Sustain. Resilient Infrastruct. 2020, 5, 365–377. [Google Scholar] [CrossRef]
- Tsai, C.F.; Chang, F.Y. Combining instance selection for better missing value imputation. J. Syst. Softw. 2016, 122, 63–71. [Google Scholar] [CrossRef]
- García-Laencina, P.J.; Sancho-Gómez, J.L.; Figueiras-Vidal, A.R.; Verleysen, M. K nearest neighbours with mutual information for simultaneous classification and missing data imputation. Neurocomputing 2009, 72, 1483–1493. [Google Scholar] [CrossRef]
- Liew, A.W.C.; Law, N.F.; Yan, H. Missing value imputation for gene expression data: Computational techniques to recover missing data from available information. Briefings Bioinform. 2010, 12, 498–513. [Google Scholar] [CrossRef] [PubMed]
- García-Laencina, P.J.; Sancho-Gómez, J.L.; Figueiras-Vidal, A.R. Pattern classification with missing data: A review. Neural Comput. Appl. 2010, 19, 263–282. [Google Scholar] [CrossRef]
- Ngouna, R.H.; Ratolojanahary, R.; Medjaher, K.; Dauriac, F.; Sebilo, M.; Junca-Bourié, J. A data-driven method for detecting and diagnosing causes of water quality contamination in a dataset with a high rate of missing values. Eng. Appl. Artif. Intell. 2020, 95, 103822. [Google Scholar] [CrossRef]
- Bischof, S.; Harth, A.; Kämpgen, B.; Polleres, A.; Schneider, P. Enriching integrated statistical open city data by combining equational knowledge and missing value imputation. J. Web Semant. 2018, 48, 22–47. [Google Scholar] [CrossRef]
- Yadav, M.L.; Roychoudhury, B. Handling missing values: A study of popular imputation packages in R. Knowl. Based Syst. 2018, 160, 104–118. [Google Scholar] [CrossRef]
- Serrano-Notivoli, R.; de Luis, M.; Beguería, S. An R package for daily precipitation climate series reconstruction. Environ. Model. Softw. 2017, 89, 190–195. [Google Scholar] [CrossRef]
- Murtojärvi, M.; Suominen, T.; Uusipaikka, E.; Nevalainen, O.S. Optimising an observational water monitoring network for Archipelago Sea, South West Finland. Comput. Geosci. 2011, 37, 844–854. [Google Scholar] [CrossRef]
- Belda, S.; Pipia, L.; Morcillo-Pallarés, P.; Rivera-Caicedo, J.P.; Amin, E.; De Grave, C.; Verrelst, J. DATimeS: A machine learning time series GUI toolbox for gap-filling and vegetation phenology trends detection. Environ. Model. Softw. 2020, 127, 104666. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, J.C.; Ding, Y.; Lin, C.; Jiang, F.; Wang, M.; Zhai, C. Transfer learning for long-interval consecutive missing values imputation without external features in air pollution time series. Adv. Eng. Inform. 2020, 44, 101092. [Google Scholar] [CrossRef]
- Giustarini, L.; Parisot, O.; Ghoniem, M.; Hostache, R.; Trebs, I.; Otjacques, B. A user-driven case-based reasoning tool for infilling missing values in daily mean river flow records. Environ. Model. Softw. 2016, 82, 308–320. [Google Scholar] [CrossRef]
- Nelwamondo, F.V.; Golding, D.; Marwala, T. A dynamic programming approach to missing data estimation using neural networks. Inf. Sci. 2013, 237, 49–58. [Google Scholar] [CrossRef]
- Spinelli, I.; Scardapane, S.; Uncini, A. Missing data imputation with adversarially-trained graph convolutional networks. Neural Netw. 2020, 129, 249–260. [Google Scholar] [CrossRef]
- Collobert, R.; Weston, J. A Unified Architecture for Natural Language Processing: Deep Neural Networks with Multitask Learning. In Proceedings of the 25th International Conference on Machine Learning, ICML’08, Helsinki, Finland, 5–9 July 2008; Association for Computing Machinery: New York, NY, USA, 2008; pp. 160–167. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Graves, A.; Mohamed, A.r.; Hinton, G. Speech recognition with deep recurrent neural networks. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 6645–6649. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef]
- Zhou, J.; Cui, G.; Zhang, Z.; Yang, C.; Liu, Z.; Wang, L.; Li, C.; Sun, M. Graph Neural Networks: A Review of Methods and Applications. arXiv 2019, arXiv:cs.LG/1812.08434. [Google Scholar]
- Cai, H.; Zheng, V.W.; Chang, K.C.C. A comprehensive survey of graph embedding: Problems, techniques, and applications. IEEE Trans. Knowl. Data Eng. 2018, 30, 1616–1637. [Google Scholar] [CrossRef]
- Grover, A.; Leskovec, J. node2vec: Scalable feature learning for networks. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 855–864. [Google Scholar]
- Scarselli, F.; Gori, M.; Tsoi, A.C.; Hagenbuchner, M.; Monfardini, G. The graph neural network model. IEEE Trans. Neural Netw. 2008, 20, 61–80. [Google Scholar] [CrossRef]
- Li, Y.; Tarlow, D.; Brockschmidt, M.; Zemel, R. Gated Graph Sequence Neural Networks. arXiv 2017, arXiv:cs.LG/1511.05493. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2017, arXiv:cs.LG/1609.02907. [Google Scholar]
- Thekumparampil, K.K.; Wang, C.; Oh, S.; Li, L.J. Attention-Based Graph Neural Network for Semi-Supervised Learning. arXiv 2017, arXiv:stat.ML/1803.03735. [Google Scholar]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral Networks and Locally Connected Networks on Graphs. arXiv 2014, arXiv:cs.LG/1312.6203. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. arXiv 2017, arXiv:cs.LG/1606.09375. [Google Scholar]
- Hammond, D.K.; Vandergheynst, P.; Gribonval, R. Wavelets on graphs via spectral graph theory. Appl. Comput. Harmon. Anal. 2011, 30, 129–150. [Google Scholar] [CrossRef]
- Duvenaud, D.; Maclaurin, D.; Aguilera-Iparraguirre, J.; Gómez-Bombarelli, R.; Hirzel, T.; Aspuru-Guzik, A.; Adams, R.P. Convolutional Networks on Graphs for Learning Molecular Fingerprints. arXiv 2015, arXiv:cs.LG/1509.09292. [Google Scholar]
- Hamilton, W.; Ying, Z.; Leskovec, J. Inductive representation learning on large graphs. arXiv 2017, arXiv:1706.02216. [Google Scholar]
- Du, J.; Zhang, S.; Wu, G.; Moura, J.M.; Kar, S. Topology adaptive graph convolutional networks. arXiv 2017, arXiv:1710.10370. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Safavian, S.R.; Landgrebe, D. A survey of decision tree classifier methodology. IEEE Trans. Syst. Man Cybern. 1991, 21, 660–674. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Strahler, A. Quantitative analysis of watershed geomorphology. Eos Trans. Am. Geophys. Union 1957, 38, 913–920. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Chintala, S.; Chanan, G.; Yang, E.; DeVito, Z.; Lin, Z.; Desmaison, A.; Antiga, L.; Lerer, A. Automatic Differentiation in PyTorch. arXiv 2017, arXiv:1706.02216. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Rahimi, A.; Cohn, T.; Baldwin, T. Semi-supervised User Geolocation via Graph Convolutional Networks. arXiv 2018, arXiv:cs.CL/1804.08049. [Google Scholar]
- Tsiami, L.; Makropoulos, C. Cyber—Physical Attack Detection in Water Distribution Systems with Temporal Graph Convolutional Neural Networks. Water 2021, 13, 1247. [Google Scholar] [CrossRef]
- Jepsen, T.S.; Jensen, C.S.; Nielsen, T.D. Graph Convolutional Networks for Road Networks. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019. [Google Scholar] [CrossRef]
- Kumar, A.; Rizvi, S.M.A.A.; Brooks, B.; Vanderveld, R.A.; Wilson, K.H.; Kenney, C.; Edelstein, S.; Finch, A.; Maxwell, A.; Zuckerbraun, J.; et al. Using Machine Learning to Assess the Risk of and Prevent Water Main Breaks. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Angers Dataset | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SVM | ANN | DT | ChebConv | GCNConv | SAGEConv | TAGConv | ||||||||||||||||
| Attribute | % | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 |
| Diameter | 10 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.21 | 0.25 | 0.19 | 0.22 | 0.41 | 0.6 | 0.45 | 0.26 | 0.28 | 0.23 | 0.25 | 0.21 | 0.22 | 0.27 | 0.34 | 0.26 |
| 20 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.51 | 0.69 | 0.56 | 0.26 | 0.28 | 0.24 | 0.26 | 0.24 | 0.23 | 0.29 | 0.38 | 0.29 | |
| 30 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.57 | 0.77 | 0.63 | 0.26 | 0.26 | 0.23 | 0.26 | 0.27 | 0.23 | 0.3 | 0.4 | 0.3 | |
| 40 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.61 | 0.79 | 0.66 | 0.26 | 0.26 | 0.23 | 0.26 | 0.26 | 0.23 | 0.3 | 0.42 | 0.3 | |
| 50 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.66 | 0.8 | 0.7 | 0.26 | 0.28 | 0.24 | 0.27 | 0.31 | 0.25 | 0.3 | 0.41 | 0.3 | |
| 60 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.68 | 0.81 | 0.71 | 0.25 | 0.23 | 0.23 | 0.27 | 0.36 | 0.26 | 0.3 | 0.41 | 0.31 | |
| 70 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.69 | 0.77 | 0.71 | 0.26 | 0.29 | 0.23 | 0.27 | 0.35 | 0.25 | 0.3 | 0.4 | 0.3 | |
| 80 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.69 | 0.78 | 0.72 | 0.26 | 0.28 | 0.23 | 0.26 | 0.29 | 0.24 | 0.3 | 0.41 | 0.3 | |
| 90 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.25 | 0.19 | 0.22 | 0.75 | 0.76 | 0.74 | 0.27 | 0.29 | 0.24 | 0.26 | 0.27 | 0.23 | 0.31 | 0.43 | 0.31 | |
| Material | 10 | 0.5 | 0.42 | 0.45 | 0.5 | 0.41 | 0.45 | 0.49 | 0.43 | 0.45 | 0.62 | 0.78 | 0.66 | 0.54 | 0.69 | 0.53 | 0.52 | 0.63 | 0.5 | 0.56 | 0.73 | 0.57 |
| 20 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.71 | 0.82 | 0.75 | 0.53 | 0.66 | 0.51 | 0.53 | 0.6 | 0.5 | 0.59 | 0.83 | 0.61 | |
| 30 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.42 | 0.45 | 0.78 | 0.86 | 0.81 | 0.54 | 0.74 | 0.53 | 0.54 | 0.71 | 0.53 | 0.59 | 0.81 | 0.6 | |
| 40 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.85 | 0.89 | 0.86 | 0.54 | 0.76 | 0.53 | 0.54 | 0.74 | 0.53 | 0.6 | 0.82 | 0.63 | |
| 50 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.86 | 0.88 | 0.87 | 0.54 | 0.76 | 0.53 | 0.55 | 0.77 | 0.54 | 0.6 | 0.87 | 0.63 | |
| 60 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.87 | 0.9 | 0.89 | 0.53 | 0.64 | 0.5 | 0.54 | 0.73 | 0.53 | 0.6 | 0.83 | 0.63 | |
| 70 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.87 | 0.92 | 0.89 | 0.52 | 0.6 | 0.49 | 0.52 | 0.61 | 0.49 | 0.61 | 0.85 | 0.63 | |
| 80 | 0.5 | 0.42 | 0.45 | 0.5 | 0.42 | 0.45 | 0.5 | 0.42 | 0.45 | 0.88 | 0.93 | 0.9 | 0.53 | 0.75 | 0.52 | 0.53 | 0.75 | 0.52 | 0.6 | 0.87 | 0.63 | |
| 90 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.5 | 0.41 | 0.45 | 0.91 | 0.95 | 0.93 | 0.53 | 0.64 | 0.5 | 0.53 | 0.64 | 0.5 | 0.62 | 0.91 | 0.65 | |
| (b) Montpellier Dataset | ||||||||||||||||||||||
| SVM | ANN | DT | ChebConv | GCNConv | SAGEConv | TAGConv | ||||||||||||||||
| Attribute | % | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 |
| Diameter | 10 | 0.22 | 0.16 | 0.18 | 0.23 | 0.16 | 0.19 | 0.22 | 0.17 | 0.19 | 0.48 | 0.62 | 0.52 | 0.23 | 0.38 | 0.23 | 0.23 | 0.37 | 0.23 | 0.38 | 0.52 | 0.41 |
| 20 | 0.25 | 0.17 | 0.2 | 0.36 | 0.24 | 0.29 | 0.38 | 0.26 | 0.31 | 0.63 | 0.74 | 0.67 | 0.39 | 0.44 | 0.37 | 0.39 | 0.47 | 0.37 | 0.43 | 0.5 | 0.43 | |
| 30 | 0.48 | 0.31 | 0.38 | 0.48 | 0.31 | 0.38 | 0.48 | 0.31 | 0.38 | 0.7 | 0.78 | 0.73 | 0.47 | 0.39 | 0.39 | 0.47 | 0.43 | 0.4 | 0.44 | 0.47 | 0.42 | |
| 40 | 0.48 | 0.32 | 0.38 | 0.48 | 0.32 | 0.38 | 0.48 | 0.32 | 0.38 | 0.76 | 0.85 | 0.79 | 0.46 | 0.37 | 0.39 | 0.46 | 0.37 | 0.39 | 0.44 | 0.52 | 0.42 | |
| 50 | 0.48 | 0.31 | 0.38 | 0.48 | 0.31 | 0.38 | 0.48 | 0.31 | 0.38 | 0.8 | 0.88 | 0.83 | 0.47 | 0.34 | 0.39 | 0.47 | 0.35 | 0.39 | 0.47 | 0.53 | 0.43 | |
| 60 | 0.48 | 0.32 | 0.38 | 0.48 | 0.32 | 0.38 | 0.48 | 0.32 | 0.38 | 0.83 | 0.88 | 0.84 | 0.48 | 0.33 | 0.39 | 0.48 | 0.35 | 0.39 | 0.46 | 0.53 | 0.42 | |
| 70 | 0.47 | 0.32 | 0.38 | 0.47 | 0.32 | 0.38 | 0.47 | 0.32 | 0.38 | 0.85 | 0.91 | 0.87 | 0.47 | 0.34 | 0.38 | 0.47 | 0.34 | 0.38 | 0.45 | 0.46 | 0.41 | |
| 80 | 0.49 | 0.34 | 0.4 | 0.49 | 0.34 | 0.4 | 0.49 | 0.34 | 0.4 | 0.85 | 0.91 | 0.87 | 0.48 | 0.34 | 0.4 | 0.48 | 0.35 | 0.4 | 0.48 | 0.55 | 0.44 | |
| 90 | 0.47 | 0.33 | 0.38 | 0.47 | 0.33 | 0.38 | 0.47 | 0.33 | 0.38 | 0.87 | 0.91 | 0.88 | 0.47 | 0.33 | 0.38 | 0.47 | 0.33 | 0.38 | 0.46 | 0.5 | 0.41 | |
| Material | 10 | 0.36 | 0.33 | 0.33 | 0.35 | 0.29 | 0.31 | 0.36 | 0.33 | 0.32 | 0.43 | 0.55 | 0.45 | 0.36 | 0.33 | 0.34 | 0.36 | 0.33 | 0.33 | 0.35 | 0.36 | 0.34 |
| 20 | 0.39 | 0.33 | 0.34 | 0.39 | 0.31 | 0.33 | 0.39 | 0.32 | 0.34 | 0.55 | 0.68 | 0.57 | 0.39 | 0.35 | 0.35 | 0.4 | 0.36 | 0.36 | 0.39 | 0.37 | 0.36 | |
| 30 | 0.39 | 0.32 | 0.35 | 0.39 | 0.28 | 0.32 | 0.39 | 0.33 | 0.35 | 0.6 | 0.69 | 0.62 | 0.4 | 0.37 | 0.36 | 0.4 | 0.35 | 0.36 | 0.41 | 0.39 | 0.37 | |
| 40 | 0.39 | 0.33 | 0.35 | 0.39 | 0.31 | 0.33 | 0.39 | 0.33 | 0.35 | 0.64 | 0.75 | 0.65 | 0.39 | 0.33 | 0.35 | 0.39 | 0.34 | 0.35 | 0.41 | 0.38 | 0.38 | |
| 50 | 0.39 | 0.32 | 0.34 | 0.39 | 0.27 | 0.31 | 0.39 | 0.33 | 0.34 | 0.68 | 0.84 | 0.71 | 0.39 | 0.33 | 0.35 | 0.39 | 0.33 | 0.34 | 0.42 | 0.4 | 0.38 | |
| 60 | 0.39 | 0.33 | 0.34 | 0.39 | 0.3 | 0.32 | 0.39 | 0.33 | 0.34 | 0.72 | 0.85 | 0.76 | 0.39 | 0.33 | 0.35 | 0.39 | 0.34 | 0.35 | 0.42 | 0.38 | 0.38 | |
| 70 | 0.39 | 0.32 | 0.34 | 0.39 | 0.3 | 0.33 | 0.39 | 0.32 | 0.34 | 0.72 | 0.83 | 0.75 | 0.39 | 0.33 | 0.35 | 0.4 | 0.35 | 0.35 | 0.42 | 0.36 | 0.38 | |
| 80 | 0.38 | 0.33 | 0.33 | 0.38 | 0.29 | 0.32 | 0.38 | 0.33 | 0.33 | 0.72 | 0.88 | 0.75 | 0.37 | 0.31 | 0.33 | 0.38 | 0.32 | 0.34 | 0.41 | 0.36 | 0.37 | |
| 90 | 0.39 | 0.33 | 0.33 | 0.38 | 0.28 | 0.31 | 0.39 | 0.34 | 0.32 | 0.74 | 0.78 | 0.75 | 0.4 | 0.35 | 0.36 | 0.39 | 0.33 | 0.34 | 0.44 | 0.4 | 0.41 | |
| (a) Angers Dataset | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SVM | ANN | DT | ChebConv | GCNConv | SAGEConv | TAGConv | ||||||||||||||||
| Attribute | % | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 |
| Diameter | 10 | 0.49 | 0.46 | 0.47 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.58 | 0.76 | 0.62 | 0.48 | 0.45 | 0.46 | 0.47 | 0.45 | 0.46 | 0.48 | 0.5 | 0.47 |
| 20 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.64 | 0.74 | 0.66 | 0.48 | 0.45 | 0.46 | 0.48 | 0.45 | 0.46 | 0.48 | 0.46 | 0.47 | |
| 30 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.64 | 0.73 | 0.66 | 0.48 | 0.45 | 0.47 | 0.48 | 0.45 | 0.47 | 0.48 | 0.46 | 0.47 | |
| 40 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.47 | 0.49 | 0.46 | 0.47 | 0.68 | 0.76 | 0.7 | 0.48 | 0.45 | 0.47 | 0.48 | 0.45 | 0.47 | 0.49 | 0.46 | 0.47 | |
| 50 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.67 | 0.79 | 0.69 | 0.48 | 0.45 | 0.47 | 0.48 | 0.45 | 0.47 | 0.48 | 0.46 | 0.47 | |
| 60 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.68 | 0.8 | 0.7 | 0.48 | 0.45 | 0.47 | 0.48 | 0.45 | 0.47 | 0.48 | 0.46 | 0.47 | |
| 70 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.47 | 0.49 | 0.46 | 0.48 | 0.7 | 0.77 | 0.71 | 0.48 | 0.46 | 0.47 | 0.47 | 0.46 | 0.47 | 0.48 | 0.46 | 0.47 | |
| 80 | 0.5 | 0.46 | 0.48 | 0.5 | 0.46 | 0.48 | 0.5 | 0.46 | 0.48 | 0.66 | 0.71 | 0.66 | 0.48 | 0.45 | 0.46 | 0.48 | 0.45 | 0.46 | 0.48 | 0.46 | 0.47 | |
| 90 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.49 | 0.46 | 0.48 | 0.74 | 0.77 | 0.74 | 0.48 | 0.45 | 0.47 | 0.48 | 0.46 | 0.47 | 0.48 | 0.46 | 0.47 | |
| Material | 10 | 0.96 | 0.99 | 0.97 | 0.96 | 0.99 | 0.97 | 0.97 | 0.99 | 0.98 | 0.87 | 0.93 | 0.9 | 0.93 | 0.95 | 0.94 | 0.92 | 0.95 | 0.94 | 0.9 | 0.94 | 0.92 |
| 20 | 0.96 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.91 | 0.94 | 0.92 | 0.94 | 0.96 | 0.95 | 0.94 | 0.95 | 0.95 | 0.94 | 0.96 | 0.95 | |
| 30 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.94 | 0.96 | 0.95 | 0.95 | 0.95 | 0.95 | 0.94 | 0.96 | 0.95 | 0.95 | 0.96 | 0.96 | |
| 40 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.94 | 0.96 | 0.95 | 0.94 | 0.96 | 0.95 | 0.94 | 0.95 | 0.95 | 0.95 | 0.96 | 0.96 | |
| 50 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.95 | 0.97 | 0.96 | 0.95 | 0.96 | 0.95 | 0.94 | 0.96 | 0.95 | 0.96 | 0.98 | 0.97 | |
| 60 | 0.98 | 0.99 | 0.98 | 0.98 | 0.99 | 0.98 | 0.98 | 0.99 | 0.98 | 0.97 | 0.97 | 0.97 | 0.96 | 0.97 | 0.96 | 0.96 | 0.97 | 0.96 | 0.97 | 0.98 | 0.97 | |
| 70 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.97 | 0.99 | 0.98 | 0.95 | 0.97 | 0.96 | 0.95 | 0.97 | 0.96 | 0.97 | 0.99 | 0.98 | |
| 80 | 0.96 | 0.99 | 0.98 | 0.96 | 0.99 | 0.98 | 0.96 | 0.99 | 0.98 | 0.95 | 0.98 | 0.96 | 0.94 | 0.96 | 0.95 | 0.94 | 0.96 | 0.95 | 0.96 | 0.98 | 0.97 | |
| 90 | 0.95 | 0.99 | 0.97 | 0.95 | 0.99 | 0.97 | 0.95 | 0.99 | 0.97 | 0.97 | 0.97 | 0.97 | 0.93 | 0.96 | 0.94 | 0.93 | 0.96 | 0.94 | 0.95 | 0.99 | 0.97 | |
| (b) Montpellier Dataset | ||||||||||||||||||||||
| SVM | ANN | DT | ChebConv | GCNConv | SAGEConv | TAGConv | ||||||||||||||||
| Attribute | % | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 | MR | MP | MF1 |
| Diameter | 10 | 0.5 | 0.64 | 0.52 | 0.51 | 0.58 | 0.52 | 0.51 | 0.6 | 0.52 | 0.75 | 0.86 | 0.79 | 0.52 | 0.64 | 0.54 | 0.52 | 0.61 | 0.54 | 0.67 | 0.83 | 0.73 |
| 20 | 0.54 | 0.64 | 0.55 | 0.64 | 0.69 | 0.64 | 0.59 | 0.68 | 0.6 | 0.82 | 0.89 | 0.85 | 0.7 | 0.81 | 0.72 | 0.68 | 0.82 | 0.71 | 0.77 | 0.84 | 0.79 | |
| 30 | 0.77 | 0.86 | 0.79 | 0.74 | 0.81 | 0.75 | 0.77 | 0.85 | 0.79 | 0.85 | 0.9 | 0.87 | 0.76 | 0.85 | 0.79 | 0.76 | 0.84 | 0.79 | 0.8 | 0.86 | 0.82 | |
| 40 | 0.77 | 0.85 | 0.77 | 0.77 | 0.81 | 0.75 | 0.78 | 0.84 | 0.77 | 0.88 | 0.92 | 0.9 | 0.79 | 0.83 | 0.79 | 0.78 | 0.82 | 0.78 | 0.81 | 0.85 | 0.82 | |
| 50 | 0.77 | 0.86 | 0.79 | 0.78 | 0.85 | 0.79 | 0.79 | 0.85 | 0.79 | 0.88 | 0.92 | 0.9 | 0.79 | 0.83 | 0.8 | 0.79 | 0.84 | 0.8 | 0.81 | 0.88 | 0.83 | |
| 60 | 0.8 | 0.86 | 0.81 | 0.77 | 0.83 | 0.78 | 0.8 | 0.85 | 0.81 | 0.9 | 0.93 | 0.91 | 0.82 | 0.83 | 0.82 | 0.82 | 0.83 | 0.81 | 0.85 | 0.86 | 0.85 | |
| 70 | 0.75 | 0.85 | 0.77 | 0.76 | 0.84 | 0.77 | 0.76 | 0.85 | 0.77 | 0.89 | 0.93 | 0.91 | 0.77 | 0.82 | 0.79 | 0.77 | 0.82 | 0.78 | 0.81 | 0.86 | 0.82 | |
| 80 | 0.75 | 0.81 | 0.76 | 0.77 | 0.86 | 0.78 | 0.75 | 0.81 | 0.76 | 0.89 | 0.93 | 0.91 | 0.79 | 0.82 | 0.79 | 0.79 | 0.82 | 0.79 | 0.85 | 0.87 | 0.85 | |
| 90 | 0.79 | 0.81 | 0.78 | 0.79 | 0.8 | 0.78 | 0.79 | 0.8 | 0.78 | 0.89 | 0.96 | 0.91 | 0.84 | 0.85 | 0.83 | 0.84 | 0.83 | 0.83 | 0.9 | 0.87 | 0.88 | |
| Material | 10 | 0.6 | 0.72 | 0.63 | 0.54 | 0.52 | 0.52 | 0.6 | 0.68 | 0.61 | 0.54 | 0.73 | 0.57 | 0.6 | 0.65 | 0.61 | 0.6 | 0.64 | 0.61 | 0.63 | 0.7 | 0.65 |
| 20 | 0.66 | 0.73 | 0.68 | 0.63 | 0.65 | 0.63 | 0.66 | 0.76 | 0.68 | 0.65 | 0.78 | 0.68 | 0.64 | 0.68 | 0.65 | 0.63 | 0.68 | 0.64 | 0.65 | 0.71 | 0.66 | |
| 30 | 0.67 | 0.79 | 0.7 | 0.62 | 0.71 | 0.64 | 0.67 | 0.81 | 0.7 | 0.69 | 0.81 | 0.72 | 0.65 | 0.7 | 0.67 | 0.65 | 0.69 | 0.66 | 0.67 | 0.73 | 0.68 | |
| 40 | 0.67 | 0.77 | 0.7 | 0.64 | 0.7 | 0.66 | 0.68 | 0.82 | 0.72 | 0.71 | 0.82 | 0.74 | 0.65 | 0.69 | 0.66 | 0.64 | 0.68 | 0.65 | 0.66 | 0.72 | 0.68 | |
| 50 | 0.68 | 0.76 | 0.7 | 0.65 | 0.7 | 0.66 | 0.7 | 0.83 | 0.73 | 0.73 | 0.85 | 0.76 | 0.67 | 0.7 | 0.67 | 0.65 | 0.67 | 0.65 | 0.67 | 0.71 | 0.68 | |
| 60 | 0.69 | 0.81 | 0.72 | 0.67 | 0.72 | 0.68 | 0.69 | 0.84 | 0.72 | 0.72 | 0.81 | 0.74 | 0.64 | 0.69 | 0.65 | 0.65 | 0.69 | 0.66 | 0.66 | 0.71 | 0.67 | |
| 70 | 0.7 | 0.83 | 0.72 | 0.66 | 0.7 | 0.67 | 0.71 | 0.87 | 0.74 | 0.76 | 0.81 | 0.77 | 0.66 | 0.7 | 0.67 | 0.66 | 0.69 | 0.67 | 0.67 | 0.72 | 0.68 | |
| 80 | 0.67 | 0.78 | 0.7 | 0.65 | 0.71 | 0.66 | 0.68 | 0.82 | 0.71 | 0.73 | 0.84 | 0.76 | 0.65 | 0.69 | 0.66 | 0.65 | 0.69 | 0.66 | 0.66 | 0.72 | 0.67 | |
| 90 | 0.72 | 0.78 | 0.73 | 0.65 | 0.69 | 0.66 | 0.72 | 0.78 | 0.73 | 0.79 | 0.8 | 0.79 | 0.68 | 0.69 | 0.67 | 0.68 | 0.67 | 0.66 | 0.68 | 0.7 | 0.68 | |
| Angers Dataset | |||
|---|---|---|---|
| Attributes | Diameter | Material | Strahler |
| Diameter | 1 | 0.74 | 0.06 |
| Material | 0.74 | 1 | 0.01 |
| Strahler | 0.06 | 0.01 | 1 |
| Montpellier Dataset | |||
| Attributes | Diameter | Material | Strahler |
| Diameter | 1 | 0.43 | 0.31 |
| Material | 0.43 | 1 | 0.08 |
| Strahler | 0.31 | 0.08 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belghaddar, Y.; Chahinian, N.; Seriai, A.; Begdouri, A.; Abdou, R.; Delenne, C. Graph Convolutional Networks: Application to Database Completion of Wastewater Networks. Water 2021, 13, 1681. https://doi.org/10.3390/w13121681
Belghaddar Y, Chahinian N, Seriai A, Begdouri A, Abdou R, Delenne C. Graph Convolutional Networks: Application to Database Completion of Wastewater Networks. Water. 2021; 13(12):1681. https://doi.org/10.3390/w13121681
Chicago/Turabian StyleBelghaddar, Yassine, Nanee Chahinian, Abderrahmane Seriai, Ahlame Begdouri, Reda Abdou, and Carole Delenne. 2021. "Graph Convolutional Networks: Application to Database Completion of Wastewater Networks" Water 13, no. 12: 1681. https://doi.org/10.3390/w13121681
APA StyleBelghaddar, Y., Chahinian, N., Seriai, A., Begdouri, A., Abdou, R., & Delenne, C. (2021). Graph Convolutional Networks: Application to Database Completion of Wastewater Networks. Water, 13(12), 1681. https://doi.org/10.3390/w13121681