A New Method for Rapid Measurement of Canal Water Table Depth Using Airborne LiDAR, with Application to Drained Peatlands in Indonesia

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Study Areas and Methods
2.1. Study Areas and LiDAR DTM Data
2.2. Determining Canal Locations
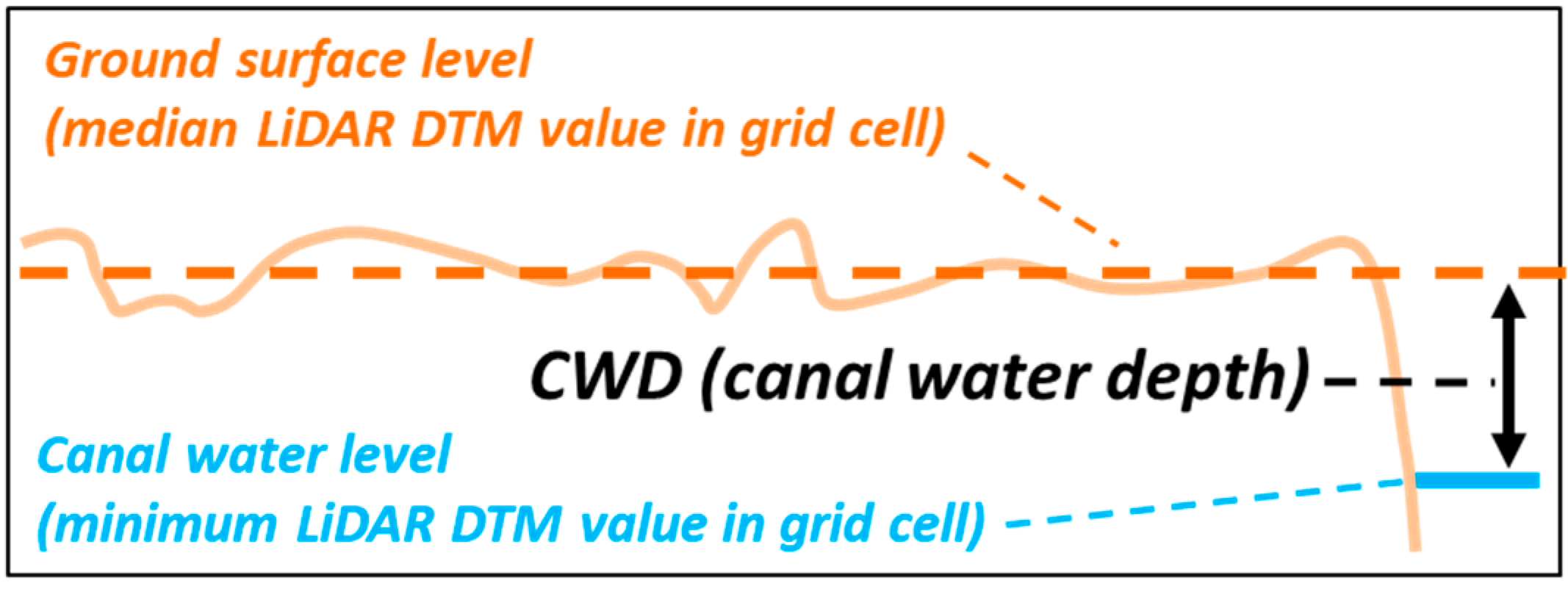
2.3. Determining CWE
2.4. Determining CWD
2.5. Grid Cell Size Considerations
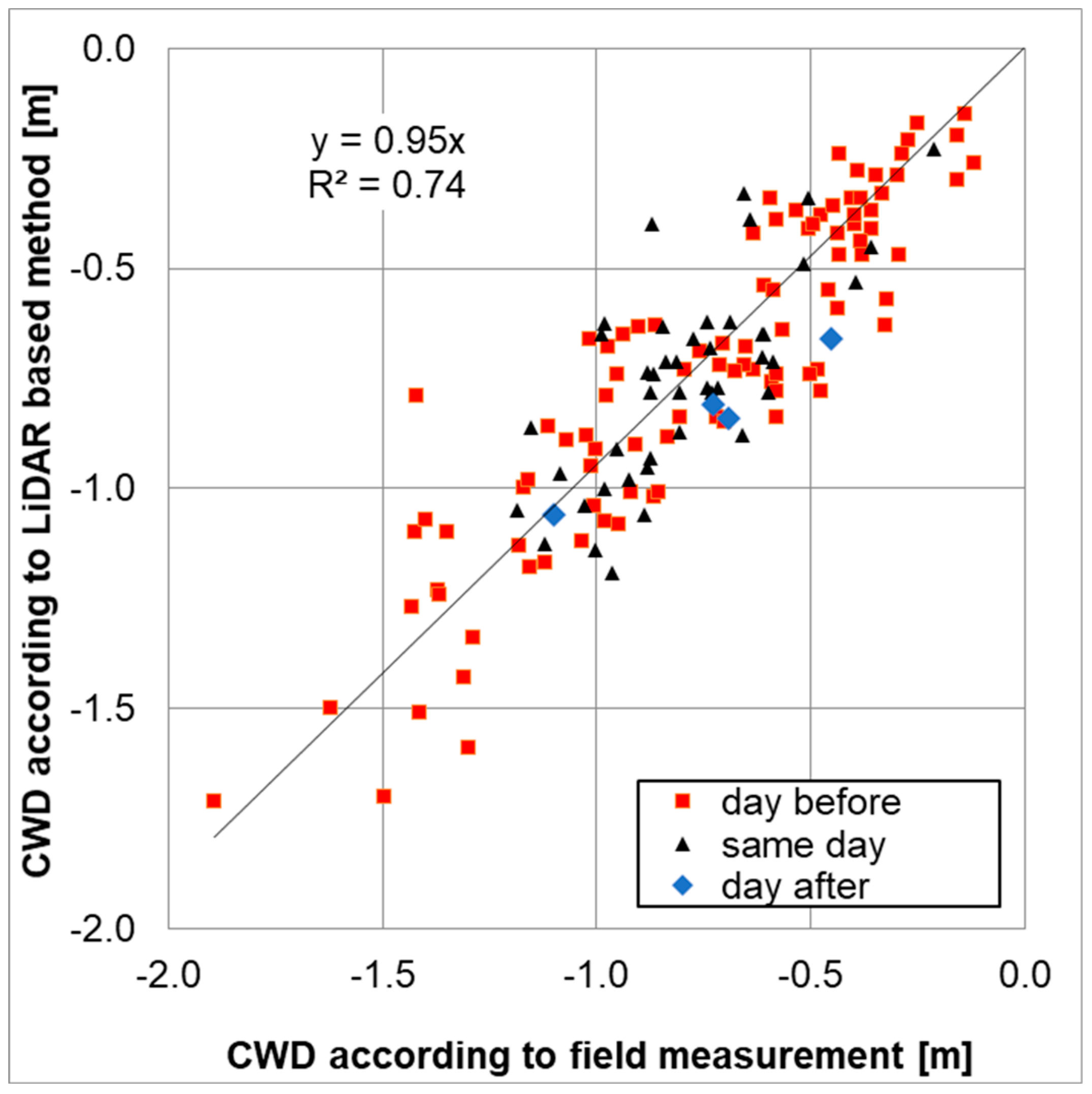
2.6. CWD Validation
3. Results and Discussion
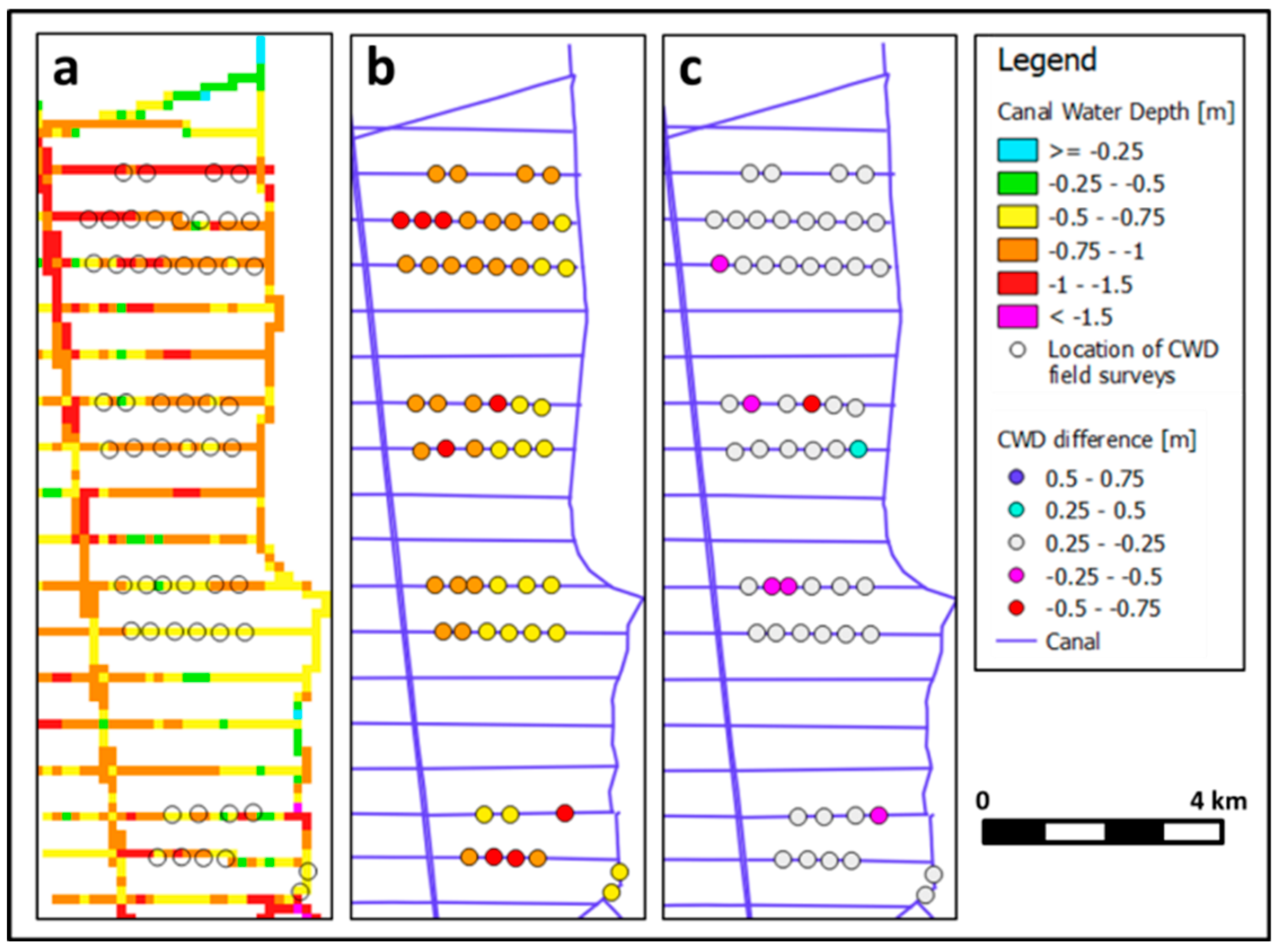
3.1. Validation of CWD
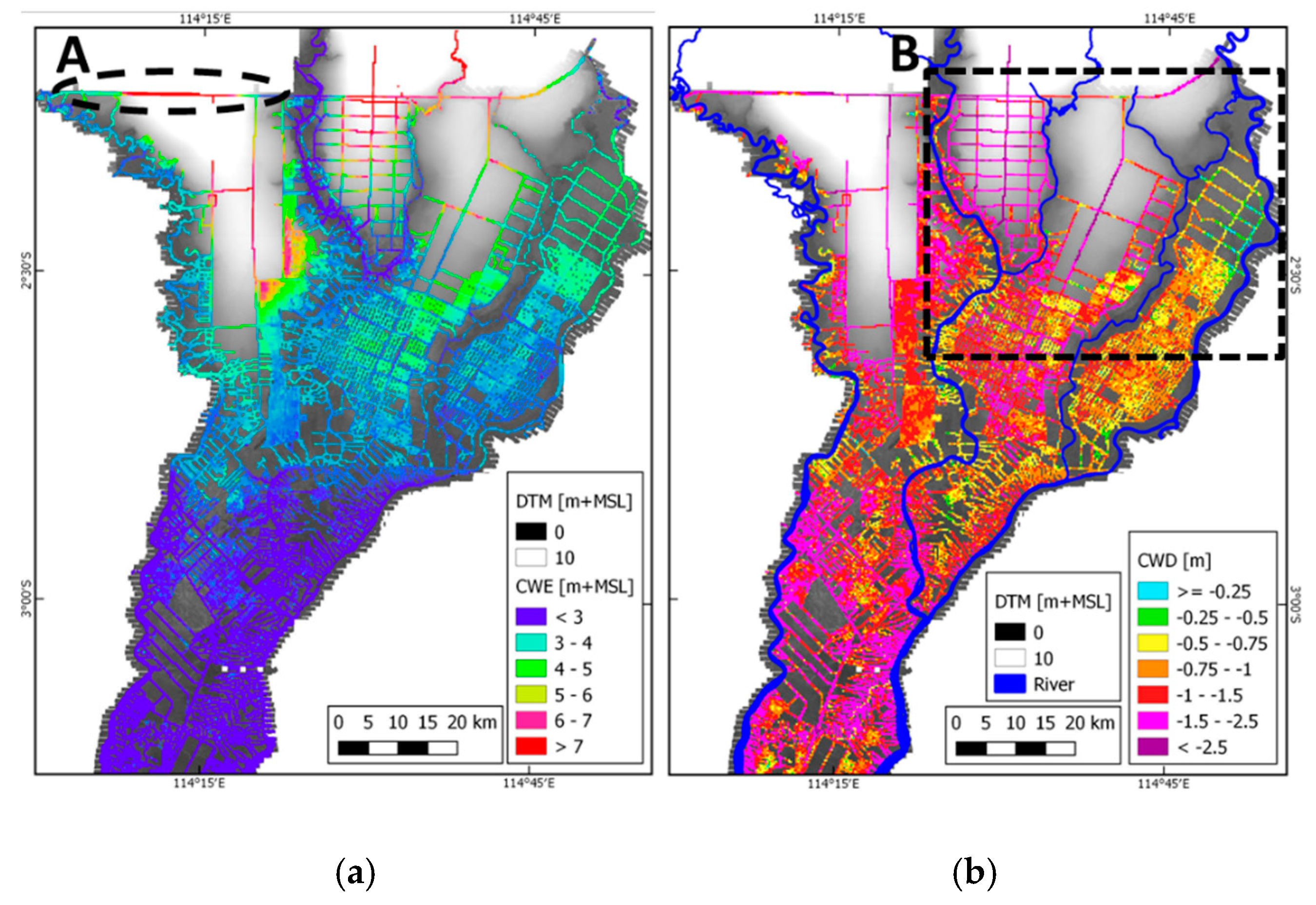
3.2. Patterns in CWE in the Central Kalimantan Study Area
3.3. Patterns in CWD in the Central Kalimantan Study Area
4. Conclusions and Recommendations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Andriesse, J. Nature and management of tropical peat soils. FAO Soils Bull. 1988, 59, 248. [Google Scholar]
- Hooijer, A.; Page, S.; Jauhiainen, J.; Lee, W.A.; Lu, X.X.; Idris, A.; Anshari, G. Subsidence and carbon loss in drained tropical peatlands. Biogeosciences 2012, 9, 1053–1071. [Google Scholar] [CrossRef]
- Nedeco/Euroconsult; BIEC. Nationwide Study of Coastal and Near-Coastal Swamp Land in Sumatra, Kalimantan and Irian Jaya: Final Report; Nedeco/Euroconsult: Arnhem, The Netherlands, 1984. [Google Scholar]
- Ritung, S.; Wahyunto, N.K.; Sukarman, H.; Suparto, T.C. Peta lahan gambut Indonesia. Skala 1:250.000 (Indonesian peatland map at the scale 1:250,000). In Balai Besar Penelitian dan Pengembangan Sumberdaya Lahan Pertanian; Indonesian Center for Agricultural Land Resources Research and Development: Bogor, Indonesia, 2011. [Google Scholar]
- Morrogh-Bernard, H.; Husson, S.; Page, S.E.; Rieley, J.O. Population status of the Bornean orang-utan (Pongo pygmaeus) in the Sebangau peat swamp forest, Central Kalimantan, Indonesia. Biol. Conserv. 2003, 110, 141–152. [Google Scholar] [CrossRef]
- Posa, M.R.C. Peat swamp forest avifauna of Central Kalimantan, Indonesia: Effects of habitat loss and degradation. Biol. Conserv. 2011, 144, 2548–2556. [Google Scholar] [CrossRef]
- Hooijer, A.; Page, S.; Canadell, J.G.; Silvius, M.; Kwadijk, J.; Wösten, H.; Jauhiainen, J. Current and future CO2 emissions from drained peatlands in Southeast Asia. Biogeosciences 2010, 7, 1505–1514. [Google Scholar] [CrossRef]
- Giam, X.; Koh, L.P.; Tan, H.H.; Miettinen, J.; Tan, H.T.; Ng, P.K. Global extinctions of freshwater fishes follow peatland conversion in Sundaland. Front. Ecol. Environ. 2012, 10, 465–470. [Google Scholar] [CrossRef]
- Gaveau, D.L.A.; Salim, M.A.; Hergoualc’h, K.; Locatelli, B.; Sloan, S.; Wooster, M.; Marlier, M.E.; Molidena, E.; Yaen, H.; DeFries, R.; et al. Major atmospheric emissions from peat fires in Southeast Asia during non-drought years: Evidence from the 2013 Sumatran fires. Sci. Rep. 2014, 4, 6112. [Google Scholar] [CrossRef]
- Hooijer, A.; Vernimmen, R.; Visser, M.; Mawdsley, N. Flooding Projections from Elevation and Subsidence Models for Oil Palm Plantations in The Rajang Delta Peatlands, Sarawak, Malaysia; Deltares Report 1207384; Deltares: Delft, The Netherlands, 2015. [Google Scholar]
- Hooijer, A.; Vernimmen, R.; Mawdsley, N.; Page, S.; Mulyadi, D.; Visser, M. Assessment of Impacts of Plantation Drainage on The Kampar Peninsula Peatland, Riau; Deltares Report 1207384; Wetlands International, CLUA and Norad: Delft, The Netherlands, 2015. [Google Scholar]
- Huijnen, V.; Wooster, M.J.; Kaiser, J.W.; Gaveau, D.L.A.; Flemming, J.; Parrington, M.; Inness, A.; Murdiyarso, D.; Main, B.; van Weele, M. Fire carbon emissions over maritime southeast Asia in 2015 largest since 1997. Sci. Rep. 2016, 6, 26886. [Google Scholar] [CrossRef]
- Sumarga, E.; Hein, L.; Hooijer, A.; Vernimmen, R. Hydrological and economic effects of oil palm cultivation in Indonesian peatlands. Ecol. Soc. 2016, 21. [Google Scholar] [CrossRef]
- Miettinen, J.; Hooijer, A.; Vernimmen, R.; Liew, S.C.; Page, S.E. From carbon sink to carbon source: Extensive peat oxidation in insular Southeast Asia since 1990. Environ. Res. Lett. 2017, 12, 024014. [Google Scholar] [CrossRef]
- BRG. Mengawali Restorasi Gambut Indonesia. Annual Report; Badan Restorasi Gambut: Jakarta, Indonesia, 2016. [Google Scholar]
- Höfle, B.; Vetter, M.; Pfeifer, N.; Mandlburger, G.; Stötter, J. Water surface mapping from airborne laser scanning using signal intensity and elevation data. Earth Surf. Process. Landf. 2009, 34, 1635–1649. [Google Scholar] [CrossRef]
- Roelens, J.; Dondeyne, S.; Van Orshoven, J.; Diels, J. Extracting cross sections and water levels of vegetated ditches from LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2016, 53, 64–75. [Google Scholar] [CrossRef]
- Brzank, A.; Heipke, C.; Goepfert, J.; Soergel, U. Aspects of generating precise digital terrain models in the Wadden Sea from lidar–water classification and structure line extraction. ISPRS J. Photogramm. Remote Sens. 2008, 63, 510–528. [Google Scholar] [CrossRef]
- Hopkinson, C.; Crasto, N.; Marsh, P.; Forbes, D.; Lesack, L. Investigating the spatial distribution of water levels in the Mackenzie Delta using airborne LiDAR. Hydrol. Process. 2011, 25, 2995–3011. [Google Scholar] [CrossRef]
- Yuan, C.; Gong, P.; Bai, Y. Performance Assessment of ICESat-2 Laser Altimeter Data for Water-Level Measurement over Lakes and Reservoirs in China. Remote Sens. 2020, 12, 770. [Google Scholar] [CrossRef]
- Vernimmen, R.; Hooijer, A.; Yuherdha, A.T.; Visser, M.; Pronk, M.; Eilander, D.; Akmalia, R.; Fitranatanegara, N.; Mulyadi, D.; Andreas, H.; et al. Creating a Lowland and Peatland Landscape Digital Terrain Model (DTM) from Interpolated Partial Coverage LiDAR Data for Central Kalimantan and East Sumatra, Indonesia. Remote Sens. 2019, 11, 1152. [Google Scholar] [CrossRef]
- Page, S.E.; Siegert, F.; Rieley, J.O.; Boehm, H.-D.V.; Jaya, A.; Limin, S. The amount of carbon released from peat and forest fires in Indonesia during 1997. Nature 2002, 420, 61–65. [Google Scholar] [CrossRef]
- Konecny, K.; Ballhorn, U.; Navratil, P.; Jubanski, J.; Page, S.E.; Tansey, K.; Hooijer, A.; Vernimmen, R.; Siegert, F. Variable carbon losses from recurrent fires in drained tropical peatlands. Glob. Chang. Biol. 2016, 22, 1469–1480. [Google Scholar] [CrossRef]
- Lampela, M.; Jauhiainen, J.; Kämäri, I.; Koskinen, M.; Tanhuanpää, T.; Valkeapää, A.; Vasander, H. Ground surface microtopography and vegetation patterns in a tropical peat swamp forest. Catena 2016, 139, 127–136. [Google Scholar] [CrossRef]
- Broersen, T.; Peters, R.; Ledoux, H. Automatic identification of watercourses in flat and engineered landscapes by computing the skeleton of a LiDAR point cloud. Comput. Geosci. 2017, 106, 171–180. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Pitts, K. The ATL08 land and vegetation product for the ICESat-2 Mission. Remote Sens. Environ. 2019, 221, 247–259. [Google Scholar] [CrossRef]
- Roelens, J.; Höfle, B.; Dondeyne, S.; Van Orshoven, J.; Diels, J. Drainage ditch extraction from airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 146, 409–420. [Google Scholar] [CrossRef]
- Brenner, O.T.; Lentz, E.E.; Hapke, C.J.; Henderson, R.E.; Wilson, K.E.; Nelson, T.R. Characterizing storm response and recovery using the beach change envelope: Fire Island, New York. Geomorphology 2018, 300, 189–202. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vernimmen, R.; Hooijer, A.; Mulyadi, D.; Setiawan, I.; Pronk, M.; Yuherdha, A.T. A New Method for Rapid Measurement of Canal Water Table Depth Using Airborne LiDAR, with Application to Drained Peatlands in Indonesia. Water 2020, 12, 1486. https://doi.org/10.3390/w12051486
Vernimmen R, Hooijer A, Mulyadi D, Setiawan I, Pronk M, Yuherdha AT. A New Method for Rapid Measurement of Canal Water Table Depth Using Airborne LiDAR, with Application to Drained Peatlands in Indonesia. Water. 2020; 12(5):1486. https://doi.org/10.3390/w12051486
Chicago/Turabian StyleVernimmen, Ronald, Aljosja Hooijer, Dedi Mulyadi, Iwan Setiawan, Maarten Pronk, and Angga T. Yuherdha. 2020. "A New Method for Rapid Measurement of Canal Water Table Depth Using Airborne LiDAR, with Application to Drained Peatlands in Indonesia" Water 12, no. 5: 1486. https://doi.org/10.3390/w12051486
APA StyleVernimmen, R., Hooijer, A., Mulyadi, D., Setiawan, I., Pronk, M., & Yuherdha, A. T. (2020). A New Method for Rapid Measurement of Canal Water Table Depth Using Airborne LiDAR, with Application to Drained Peatlands in Indonesia. Water, 12(5), 1486. https://doi.org/10.3390/w12051486