Bathymetry Time Series Using High Spatial Resolution Satellite Images

 ,
, 
 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Study Area and Materials
2.1. Study Area
2.2. In Situ Depth Data Points Obtained Using an Unmanned Surface Vehicle (USV)
2.3. Satellite Data
2.4. LiDAR Data
2.5. Echosounder Data (2008/2009 MAGRAMA and 2016/2017 IEO and IHM)
3. Methodology
3.1. Ground-Based Data
3.2. Remote Sensing Data Processing
3.2.1. Pre-Processing
3.2.2. Water Area
3.2.3. Water Depth Extraction Model
3.2.4. Bathymetric Map and Water Amount Time Series Derived from Satellite Data
3.2.5. Integration of Altimetry Data for the Mar Menor Lagoon
4. Results
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B



References
- De Pascalis, F.; Ghezzo, M.; Umgiesser, G.; De Serio, F.; Mossa, M. Use of Shyfem open source hydrodynamic model for time scales analysis in a semi-enclosed basin. In Proceedings of the 2016 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Bari, Italy, 13–14 June 2016. [Google Scholar] [CrossRef]
- Wild-Allen, K.; Andrewartha, J. Connectivity between estuaries influences nutrient transport, cycling and water quality. Mar. Chem. 2016, 185, 12–26. [Google Scholar] [CrossRef]
- Yin, Y.; Karunarathna, H.; Reeve, D.E. Numerical modelling of hydrodynamic and morphodynamic response of a meso-tidal estuary inlet to the impacts of global climate variabilities. Mar. Geol. 2019, 407, 229–247. [Google Scholar] [CrossRef]
- Lesser, G.R.; Roelvink, J.A.; van Kester, J.; Stelling, G.S. Development and validation of a three-dimensional morphological model. Coastal Eng. 2004, 51, 883–915. [Google Scholar] [CrossRef]
- Lazure, P.; Garnier, V.; Dumas, F.; Herry, C.; Chiet, M. Development of a hydrodynamic model of the Bay of Biscay. Validation of hydrology. Cont. Shelf Res. 2009, 29, 985–997. [Google Scholar] [CrossRef]
- Sedigh, M.; Tomlinson, R.; Cartwright, N.; Etemad-Shahidi, A. Numerical modelling of the Gold Coast Seaway area hydrodynamics and littoral drift. Ocean Eng. 2016, 121, 47–61. [Google Scholar] [CrossRef]
- Gunn, K.; Stock-Williams, C. On validating numerical hydrodynamic models of complex tidal flow. Int. J. Mar. Energy 2013, 3, e82–e97. [Google Scholar] [CrossRef]
- Garneau, C.; Duchesne, S.; St-Hilaire, A. Comparison of modelling approaches to estimate trapping eficiency of sedimentation basins on peatlands used for peat extraction. Ecol. Eng. 2019, 133, 60–68. [Google Scholar] [CrossRef]
- De Pablo, H.; Sobrinho, J.; Garcia, M.; Campuzano, F.; Juliano, M.; Neves, R. Validation of the 3D-MOHID hydrodynamic model for the Tagus coastal area. Water 2019, 11, 1713. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Modell. 2012, 43–44, 22–35. [Google Scholar] [CrossRef]
- Kirby, J.T.; Dalrymple, R.A. A parabolic equation for the combined refraction-diffraction of stokes waves by mildly varying topography. J. Fluid Mech. 1983, 136, 453–466. [Google Scholar] [CrossRef]
- Penven, P.; Marchesiello, P.; Debreu, L.; Lefevre, L. Software tools for pre- and post-processing of oceanic regional simulations. Environ. Modell. Softw. 2008, 23, 660–662. [Google Scholar] [CrossRef]
- Grifoll, M.; Del Campo, A.; Espino, M.; Mader, J.; González, M.; Borja, Á. Water renewal and risk assessment of water pollution in semi-enclosed domains: Application to Bilbao Harbour (Bay of Biscay). J. Mar. Syst. 2013, 109–110, S241–S251. [Google Scholar] [CrossRef]
- Guerreiro, M.; Fortunato, A.B.; Freire, P.; Rilo, A.; Taborda, R.; Freitas, M.C.; Andrade, C.; Silva, T.; Rodrigues, M.; Bertin, X.; et al. Evolution of the hydrodynamics of the Tagus estuary (Portugal) in the 21st century. J. Integr. Coast. Z. Manag. 2014, 15, 65–80. [Google Scholar] [CrossRef]
- Zhang, Y.; Baptista, A.M. SELFE: A semi-implicit Eulerian–Lagrangian finite-element model for cross-scale ocean circulation. Ocean Modell. 2008, 21, 71–96. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, F.; Stanev, E.V.; Grashorn, S. Seamless cross-scale modelling with SCHISM. Ocean Modell. 2016, 102, 64–81. [Google Scholar] [CrossRef]
- Ye, F.; Zhang, Y.; Friedrichs, M.; Wang, H.V.; Irby, I.; Shen, J.; Wang, Z. A 3D, cross-scale, baroclinic model with implicit vertical transport for the Upper Chesapeake Bay and its tributaries. Ocean Modell. 2016, 107, 82–96. [Google Scholar] [CrossRef]
- Umgiesser, G.; Ferrarin, C.; Cucco, A.; De Pascalis, F.; Bellafiore, D.; Ghezzo, M.; Bajo, M. Comparative hydrodynamics of 10 Mediterranean lagoons by means of numerical modeling. J. Geophys. Res. Oceans 2014, 119, 2212–2226. [Google Scholar] [CrossRef]
- Cucco, A.; Quattrocchi, G.; Olita, A.; Fazioli, L.; Ribotti, A.; Sinerchia, M.; Tedesco, C.; Sorgente, R. Hydrodynamic modelling of coastal seas: The role of tidal dynamics in the Messina Strait, Western Mediterranean Sea. Nat. Hazards Earth Syst. Sci. 2016, 16, 1553–1569. [Google Scholar] [CrossRef]
- Van Dongeren, A.; Svendsen, I. Absorbing-generating boundary condition for shallow water models. J. Waterw. Port Coast. 1997, 123, 303–313. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.; Holthuijsen, L.H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Gaeta, M.G.; Samaras, A.G.; Federico, I.; Archetti, R.; Maicu, F.; Lorenzetti, G. A coupled wave-3-D hydrodynamics model of the Taranto Sea (Italy): A multiple-nesting approach. Nat. Hazards Earth Syst. Sci. 2016, 16, 2071–2083. [Google Scholar] [CrossRef]
- Chubarenko, B.; Koutitonsky, V.G.; Neves, R.; Umgiesser, G. Modeling concepts. In Coastal Lagoons: Ecosystem Processes and Modeling for Sustainable Use and Development; Gönenc, I.E., Wolflin, J.P., Eds.; CRC Press: Boca Ratón, FL, USA, 2005; pp. 231–306. [Google Scholar]
- López-Castejón, F. Caracterización de la Hidrodinámica Del Mar Menor y Los Flujos de Intercambio Con El MEDITERRÁNEO Mediante Datos in Situ y Modelado Numérico. Ph.D. Thesis, Universidad Politécnica de Cartagena, Cartagena, Spain, 2017. [Google Scholar]
- Garcia-Oliva, M.; Perez-Ruzafa, A.; Umgiesser, G.; McKiver, W.; Ghezzo, M.; De Pascalis, F.; Marcos, C. Assessing the hydrodynamic response of the mar menor lagoon to dredging inlets interventions through numerical modelling. Water 2018, 10, 959. [Google Scholar] [CrossRef]
- García-Oliva, M.; Marcosa, C.; Umgiesserb, G.; McKiverb, W.; Ghezzo, M.; De Pascalisb, F.; Pérez-Ruzafa, A. Modelling the impact of dredging inlets on the salinity and temperature regimes in coastal lagoons. Ocean Coast. Manag. 2019, 180, 104913. [Google Scholar] [CrossRef]
- Ghezzo, M.; De Pascalis, F.; Umgiesser, G.; Zemlys, P.; Sigovini, M.; Marcos, C.; Pérez-Ruzafa, A. Connectivity in three European coastal lagoons. Estuaries Coasts 2015, 38, 1764–1781. [Google Scholar] [CrossRef]
- Pérez-Ruzafa, A.; Ghezzo, M.; De Pascalis, F.; Quispe, J.; Hernández-García, R.; Muñoz, I.; Vergara-Chen, C.; Umgiesser, G.; Marcos, C. Connectivity between coastal lagoons and sea: Reciprocal effects on assemblages’ structure and consequences for management. Estuar. Coast. Shelf Sci. 2019, 216, 171–186. [Google Scholar] [CrossRef]
- De Pascalis, F.; Pérez-Ruzafa, A.; Gilabert, J.; Marcos, C.; Umgiesser, G. Climate change response of the Mar Menor coastal lagoon (Spain) using a hydrodynamic finite element model. Estuar. Coast. Shelf Sci. 2012, 114, 118–129. [Google Scholar] [CrossRef]
- European Union. Directive 2007/60/EC of the European Parliament and of the Council of 23 October 2007 on the assessment and management of flood risks. Off. J. Eur. Parliam. 2007, 2455, 27–34. [Google Scholar]
- Ibarra, A.D. Análisis y Evolución de las Playas de la Región de Murcia (1956–2013). Ph.D. Thesis, Universidad de Murcia, Murcia, Spain, 2015. Available online: http://hdl.handle.net/10201/51348d (accessed on 13 December 2019).
- Lyard, F.; Genco, M.L. Optimization methods for bathymetry and open boundary conditions in a finite element model of ocean tides. J. Comput. Phys. 1994, 114, 234–256. [Google Scholar] [CrossRef]
- Chen, X. A cartesian method for fitting the bathymetry and tracking the dynamic position of the shoreline in a three-dimensional, hydrodynamic model. J. Comput. Phys. 2004, 200, 749–768. [Google Scholar] [CrossRef]
- Du Bois, P.B. Automatic calculation of bathymetry for coastal hydrodynamic models. Comput. Geosci. 2011, 37, 1303–1310. [Google Scholar] [CrossRef]
- Ardani, S.; Kaihatu, J.M. Optimization of bathymetry estimates for nearshore hydrodynamic models using bayesian methods. J. Waterw. Port Coast. 2018, 144, 04018024. [Google Scholar] [CrossRef]
- Ye, F.; Zhang, Y.J.; Wang, H.V.; Friedrichs, M.A.M.; Irby, I.D.; Alteljevich, E.; Valle-Levinson, A.; Wang, Z.; Huang, H.; Shen, J.; et al. A 3D unstructured-grid model for Chesapeake Bay: Importance of bathymetry. Ocean Modell. 2018, 127, 16–39. [Google Scholar] [CrossRef]
- Jo, Y.-H.; Sha, J.; Kwon, J.-I.; Jun, K.; Park, J. Mapping bathymetry based on waterlines observed from low altitude Helikite remote sensing platform. Acta Oceanol. Sin. 2015, 34, 110–116. [Google Scholar] [CrossRef]
- Chénier, R.; Faucher, M.-A.; Ahola, R. Satellite-derived bathymetry for improving Canadian hydrographic service charts. ISPRS Int. J. Geo Inf. 2018, 7, 306. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Harrison, L.R. Remote sensing of river bathymetry: Evaluating a range of sensors, platforms, and algorithms on the upper Sacramento River, California, USA. Water Resour. Res. 2018, 55, 3. [Google Scholar] [CrossRef]
- Brêda, J.P.L.F.; Paiva, R.C.D.; Bravo, J.M.; Passaia, O.A.; Moreira, D.M. Assimilation of satellite altimetry data for effective river bathymetry. Water Resour. Res. 2019, 55, 9. [Google Scholar] [CrossRef]
- Sagawa, T.; Yamashita, Y.; Okumura, T.; Yamanokuchi, T. Satellite derived bathymetry using machine learning and multi-temporal satellite images. Remote Sens. 2019, 11, 1155. [Google Scholar] [CrossRef]
- Favre, A.; Hewitson, B.; Lennard, C.; Cerezo-Mota, R.; Tadross, M. Cut-off Lows in the South Africa region and their contribution to precipitation. Clim. Dyn. 2013, 41, 2331. [Google Scholar] [CrossRef]
- IEO. Estudio del Fondo Marino de la Laguna Costera del Mar Menor; IEO: Madrid, Spain, 2018. [Google Scholar]
- Erena, M.; Domínguez, J.A.; Aguado-Giménez, F.; Soria, J.; García-Galiano, S. Monitoring coastal lagoon water quality through remote sensing: The mar menor as a case study. Water 2019, 11, 1468. [Google Scholar] [CrossRef]
- Caballero, I.; Ruiz, J.; Navarro, G. Sentinel-2 satellites provide near-real time evaluation of catastrophic floods in the west mediterranean. Water 2019, 11, 2499. [Google Scholar] [CrossRef]
- Austin, R.W. The remote sensing of spectral radiance from below the ocean surface. In Optical Aspects of Oceanography; Jerlov, N.G., Steemann-Nielsen, E., Eds.; Academic Press: London, UK, 1974; pp. 317–344. [Google Scholar]
- Cánovas-García, F.; García-Galiano, S.; Alonso-Sarría, F. Assessment of satellite and radar quantitative precipitation estimates for real time monitoring of meteorological extremes over the Southeast of the Iberian Peninsula. Remote Sens. 2018, 10, 1023. [Google Scholar] [CrossRef]
- De Fomento, M. Dirección General de Carreteras. Máximas Lluvias Diarias en la España Peninsular; Ministerio de Fomento: Madrid, Spain, 1999. [Google Scholar]
- Kirk, J.T.O. Light and Photosynthesis in Aquatic Ecosystem, 1st ed.; Cambridge University Press: New York, NY, USA, 1994. [Google Scholar]
- Kutser, T. Quantitative detection of chlorophyll in cyanobacterial blooms by satellite remote sensing. Limnol. Oceanogr. 2004, 49, 2179–2189. [Google Scholar] [CrossRef]
- Philpot, W.D. Radiative transfer in stratified waters: A single scattering approximation for irradiance. Appl. Optics 1987, 26, 4123–4132. [Google Scholar] [CrossRef] [PubMed]
- Polcyn, F.C.; Brown, W.L.; Sattinger, I.J. The Measurement of Water Depth by Remote Sensing Techniques; Universidad de Michigan: Ann Arbor, MI, USA, 1970. [Google Scholar]
- Hasell, P.G. Michigan Experimental Multispectral Mapping System a Description of the M7 Airborne Sensor and ITS; NASA: Washington, DC, USA, 1974.
- NOAA. Hydrologic Optics. Vol. V. Properties. Colo Pacific Marine Environmental Lab. Honolulu; NOAA: Silver Spring, MD, USA, 1976. [Google Scholar]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Martitorena, S.; Morel, A.; Gentili, B. Diffuse reflectance of oceanic shallow waters: Influence of water depth and bottom albedo. Limnol. Oceanogr. 1994, 39, 1689–1703. [Google Scholar] [CrossRef]
- Bierwirth, P.N.; Lee, T.J.; Burne, R.V. Shallow seam floor reflectance and water depth derived by unmixing multispectral imagery. Photogramm. Eng. Remote Sens. 1993, 59, 331–338. [Google Scholar]
- Dierssen, H.M.; Zimmerman, R.C.; Leathers, R.A.; Downes, T.V.; Davis, C.O. Ocean color remote sensing of seagrass and bathymetry in the bahamas banks by high resolution airborne imagery. Limnol. Oceanogr. 2003, 48, 444–455. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Olayinka, D.N.; Okolie, C.J. Bathymetric mapping of nigerian coastal waters from optical imagery. J. Eng. Res. Kuwait 2017, 22, 112–132. [Google Scholar]
- Setiawan, K.T.; Adawiah, S.W.; Marini, Y.; Winarso, G. Bathymetry data extraction analysis using Landsat 8 Data. Int. J. Remote Sens. 2016, 13, 79–86. [Google Scholar] [CrossRef][Green Version]
- Vanderstraete, T.; Goossens, R.; Ghabour, T.K. Can ASTER-Data Be Used for Bathymetric Mapping of Coral Reefs in the Red Sea Using Digital Photogrammetry, 2nd ed.; Workshop EARSeL Special Interest Group on Remote Sensing for Developing Countries, 18-20 September; Gunter, M., Matthias, B., Eds.; University Bonn: Bonn, Germany, 2003; pp. 212–218. [Google Scholar]
- Liang, J.; Zhang, J.; Ma, Y.; Zhang, C.Y. Derivation of bathymetry from high-resolution optical satellite imagery and usv sounding data. Mar. Geod. 2017, 40, 466–479. [Google Scholar] [CrossRef]
- Liu, S.; Gao, Y.; Zheng, W.; Li, X. Performance of two neural network models in bathymetry. Remote Sens. Lett. 2015, 6, 321–330. [Google Scholar] [CrossRef]
- Hernandez, W.J.; Armstrong, R.A. Deriving bathymetry from multispectral remote sensing data. J. Mar. Sci. Eng. 2016, 4, 8. [Google Scholar] [CrossRef]
- Mohamed, H.; Negm, A.; Zahran, M.; Saavedra, O.C. Bathymetry determination from high resolution satellite imagery using ensemble learning algorithms in shallow lakes: Case study el-burullus lake. Int. J. Environ. Sci. Dev. 2016, 7, 296–301. [Google Scholar] [CrossRef]
- Simon, R.N.; Tormos, T.; Danis, P.A. Very high spatial resolution optical and radar imagery in tracking water level fluctuations of a small inland reservoir. Int. J. App. Earth Obs. 2016, 38, 36–39. [Google Scholar] [CrossRef]
- Pérez-Ruzafa, A.; Gilabert, J.; Bel-Lan, A.; Moreno, V.; Gutierrez, J.M. New approach to chlorophyll a determination in shallow coastal waters by remote sensing. Sci. Mar. 1996, 60, 19–27. [Google Scholar]
- Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved bathymetric mapping of coastal and lake environments using Sentinel-2 and Landsat-8 images. Sensors 2019, 19, 2788. [Google Scholar] [CrossRef]
- Cahalanea, C.; Mageeb, A.; Monteysc, X.; Casalb, G.; Hanafind, J.; Harrise, A. Comparison of Landsat 8, RapidEye and Pleiades products for improving empirical predictions of satellite-derived bathymetry. Remote Sens. Environ. 2019, 233, 111414. [Google Scholar] [CrossRef]
- Flener, C. Estimating deep water radiance in shallow water: Adapting optical bathymetry modelling to shallow river environments. Boreal Environ. Res. 2013, 18, 488–502. [Google Scholar]
- Edwards, A.J. Applications of Satellite and Airborne Image Date to Coastal Management. Coastal region and Small Island, papers 4; UNESCO: Paris, France, 1999; p. 185. [Google Scholar]
- Committee on Earth Observing Satellites (CEOS). Feasibility Study for an Aquatic Ecosystem Earth Observing System. 2018. Available online: http://ceos.org/document_management/Publications/Feasibility-Study-for-an-Aquatic-Ecosystem-EOS-v.2-hi-res_05April2018.pdf (accessed on 12 December 2019).
- Jawak, S.D.; Vadlamani, S.S.; Luis, A.J. A synoptic review on deriving bathymetry information using remote sensing technologies: Models, methods and comparisons. Adv. Space Res. 2015, 4, 147–162. [Google Scholar] [CrossRef]
- Ferrandiz, C. La encañizada de Calnegre en la manga del mar menor y su formación en el siglo XVIII. Murgetana 1976, 45, 87–101. [Google Scholar]
- Del Río, V.D. Estudio Ecológico del Mar Menor. Geología, (Proyecto nº 1005 Medio Marino); IEO: Madrid, Spain, 1990. [Google Scholar]
- Lillo, M.J. Geomorfología del mar menor. Pap. Dep. Geogr. 1981, 8, 9–48. [Google Scholar]
- Serra, J. Mar Menor (Spain). EUROSION Case Study, Institut de Ciència i Tecnologia Ambientals; Universitat Autónoma de Barcelona: Bellaterra, Spain, 2013. [Google Scholar]
- Pérez-Ruzafa, A.; Mompeán, M.C.; Marcos, C. Hydrographic, geomorphologic and fish assemblage relationships in coastal lagoons. Hydrobiologia 2007, 577, 107–125. [Google Scholar] [CrossRef]
- Pérez-Ruzafa, A.; Marcos, C. Fisheries in coastal lagoons: An assumed but poorly researched aspect of the ecology and functioning of coastal lagoons. Estuar. Coast. Shelf Sci. 2012, 110, 15–31. [Google Scholar] [CrossRef]
- Pérez-Ruzafa, A.; Pérez-Ruzafa, I.M.; Newton, A.; Marcos, C. Chapter 15—Coastal lagoons: Environmental variability, ecosystem complexity, and goods and services uniformity. In Coasts and Estuaries: The Future; Wolanski, E., Day, J., Elliott, M., Ramachandran, R., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 253–276. [Google Scholar]
- Pérez-Ruzafa, A. Estudio Ecológico y Bionómico de Los Poblamientos Bentónicos Del Mar Menor (Murcia, SE de España). Ph.D. Thesis, Universidad de Murcia, Murcia, Spain, 1989. [Google Scholar]
- Mėžinė, J.; Ferrarin, C.; Vaičiūtė, D.; Idzelytė, R.; Zemlys, P.; Umgiesser, G. Sediment transport mechanisms in a lagoon with high river discharge and sediment loading. Water 2019, 11, 1970. [Google Scholar] [CrossRef]
- Manley, J.E. High Fidelity Hydrographic Surveys Using and Autonomous Surface Craft; Massachusetts Institute of Technology: Cambridge, MA, USA, 1998. [Google Scholar]
- Manley, J.E.; Marsh, A.; Cornforth, W.; Wiseman, C. Evolution of the autonomous surface craft Autocrat. In Proceedings of the IEEE Conference and Exhibition on Oceans 2000 MTS, IEEE 2000, Providence, RI, USA, 11–14 September 2000; Volume 1, pp. 403–408. [Google Scholar]
- Brown, H.C.; Kim, A.; Eustice, R.M. An overview of autonomous underwater vehicle research and testbed at PeRL. Mar. Technol. Soc. J. 2009, 43, 33–47. [Google Scholar] [CrossRef]
- Erena, M.; Atenza, J.F.; García-Galiano, S.; Domínguez, J.A.; Bernabé, J.M. Use of drones for the topo-bathymetric monitoring of the reservoirs of the Segura river basin. Water 2019, 11, 445. [Google Scholar] [CrossRef]
- Domínguez Gómez, J.A.; Chuvieco Salinero, E.; Sastre Merlín, A. Monitoring transparency in inland water bodies using multispectral images. Int. J. Remote Sens. 2009, 30, 1567–1586. [Google Scholar] [CrossRef]
- Lia, J.; Knappa, D.; Schillb, S.; Roelfsemac, C.; Phinnc, S.; Silmand, M.; Mascaroe, J.; Asnera, G. Adaptive bathymetry estimation for shallow coastal waters using Planet Dove satellites. Remote Sens. Environ. 2019, 232, 111302. [Google Scholar] [CrossRef]
- Bernstein, L.; Adler-Golden, S.; Sundberg, R.; Levine, R.; Perkins, T.; Berk, A.; Ratkowski, A.; Felde, G.; Hoke, M. A new method for atmospheric correction and aerosol optical property retrieval for vis-swir multi- and hyperspectral imaging sensors: Quac (quick atmospheric correction). In Proceedings of the IEEE International Geoscience and Remote Sensing, Symposium, Seoul, Korea, 25–29 July 2005; Volume 5, pp. 3549–3552. [Google Scholar]
- Vanhellemont, Q.; Ruddick, K. ACOLITE for SENTINEL-2: Aquatic applications of MSI imagery. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. ESA Special Publication SP-740. [Google Scholar]
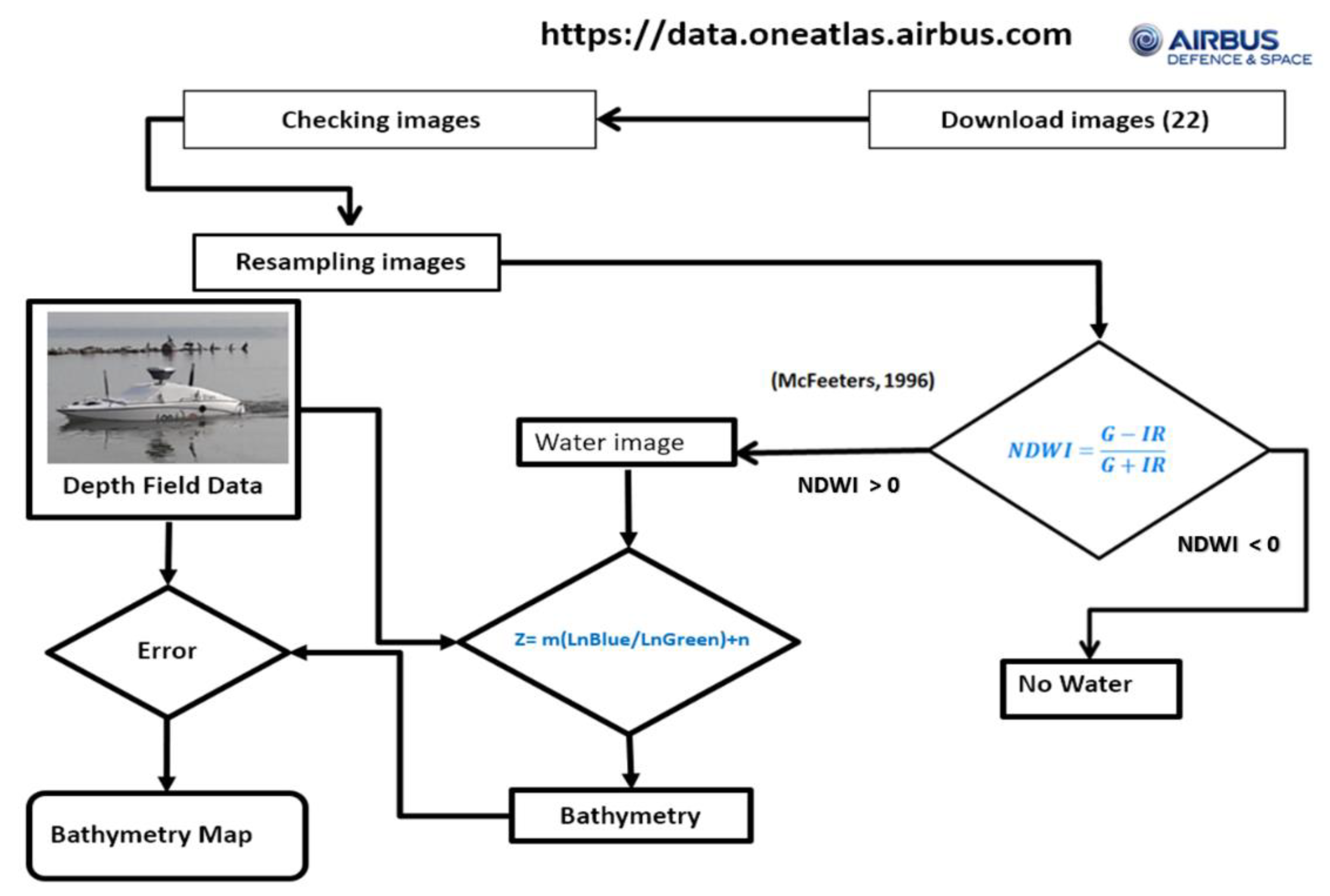
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Más, J. El Mar Menor. Relaciones, Diferencias y Afinidades Entre la Laguna Costera y el Mar Mediterráneo Adyacente; IEO: Madrid, Spain, 2006. [Google Scholar]
- García-Pintado, J.; Martínez-Mena, M.; Barberá, G.; Albaladejo, J.; Castillo, V. Anthropogenic nutrient sources and loads from a Mediterranean catchment into a coastal lagoon: Mar Menor, Spain. Sci. Total Environ. 2007, 37, 220–239. [Google Scholar] [CrossRef] [PubMed]
- Dezileau, L.; Perez-Ruzafa, A.; Blanchemanche, P.; Degeai, J.P.; Raji, O.; Martinez, P.; Marcos, C.; Von Grafenstein, U. Extreme storms during the last 6500 years from lagoonal sedimentary archives in the Mar Menor (SE Spain). Clim. Past 2016, 12, 1389–1400. [Google Scholar] [CrossRef]
- Pérez-Ruzafa, A.; Marcos, C.; Pérez-Ruzafa, I.; Ros, J.D. Evolución de las características ambientales y de los poblamientos del Mar Menor (Murcia, SE España). An. Biol. 1987, 12, 53–65. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Organization | GPS | Photogrammetry | Sensor | MDS (m) | Date |
|---|---|---|---|---|---|
| IHM (MM) | Single probe | 1967 | |||
| IGN (out MM) | 0.5 p/m2 | Leica (ALS50) | 2 | 4/10/2009 | |
| MAGRAMA (MM) | 40 p/m2 | Seabat 8124 (200 kHz) | 1 | 4/10/2009 | |
| UPCT (En.) | Leica (TPS400) | ADCP (500 kHz) | 1 | 5/08/2010 | |
| UPCT (Ma.) | Leica (TPS400) | River Surveyor M9 | 1 | 19/08/2011 | |
| UPCT (Es.) | Leica (TPS400) | River Surveyor M9 | 1 | 19/08/2011 | |
| IEO (En.) | Garmin (GPS72) | 30 p/m2 | Hondex (PS-7) | 2 | 15/05/2014 |
| IGN (out MM) | 0.5 p/m2 | Leica (ALS50) | 2 | 4/10/2016 | |
| IEO (MM) | Trimble (SPS 751) | GeoSwath (500 kHz) | 1 | 13/06/2017 | |
| IMIDA (En.) | Leica (1200) | Airmar (50 kHz) | 1 | 12/03/2017 | |
| IMIDA (En.) | Leica (1200) | Airmar (50 kHz) | 1 | 7/11/2017 | |
| IMIDA (En) | Leica (1200) | Airmar (50 kHz) | 1 | 24/04/2018 | |
| IMIDA (En.) | Leica (1200) | ECT400S (450 kHz) | 1 | 19/11/2019 | |
| IMIDA (Ma.) | Leica (1200) | ECT400S (450 kHz) | 1 | 29/11/2019 | |
| IMIDA (Es.) | Leica (1200) | ECT400S (450 kHz) | 1 | 30/11/2019 |
| Satellite | Sensor | PAN | VIS | IRC | Res (m) | Date |
|---|---|---|---|---|---|---|
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 15/10/2012 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 1/07/2014 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 23/05/2014 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 12/10/2015 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 1/07/2016 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 15/10/2016 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 20/12/2016 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 21/03/2017 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 28/06/2017 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 9/11/2017 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 5/12/2017 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 15/04/2018 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 29/04/2018 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 18/05/2018 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 29/11/2018 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 4/09/2019 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 16/09/2019 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 24/09/2019 |
| Pleiades 1B | HiRi | 1 | 3 | 1 | 0.5/2 | 29/09/2019 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 28/11/2019 |
| Pleiades 1A | HiRi | 1 | 3 | 1 | 0.5/2 | 5/12/2019 |
| Part Name | Model/Number | Specifications | Function |
|---|---|---|---|
| Boat hull | Inntelia | Fiberglass | Navigation |
| Motors | BlueRobotics | Thruster-R1 | Main actuator |
| Propellers | T-200 | 350 W | Propulsion |
| Microcontroller | Pixhawk 3.2.1 | Open hardware | Navigation control |
| Battery (LiPo) | Tattu 22.2V | 15C 4500 mAh | Power supply |
| Radio receiver | UHF | 1 W (−30 dB) | Radio command |
| GNSS | EMLID | NMEA 0183 | GPS antenna |
| Graupner | 12 ch. PCM | 2.4 GHz | Control station |
| Software | APM | 3.2 | Mission planner |
| Echo sounder | Airmar/DST 700 | 50/200 kHz | Echo sounder |
| Isobath (m) | Surface Area (2008) (km2) | Vol (2008) (109 m3) | VT (2008) (109 m3) | Surface Area (2016) (km2) | Vol (2016) (109 m3) | VT (2016) (109 m3) |
|---|---|---|---|---|---|---|
| −7 | 9.720 | 0.003 | 0.003 | 0.393 | 0.000 | 0.000 |
| −6 | 39.312 | 0.021 | 0.024 | 45.498 | 0.018 | 0.018 |
| −5 | 82.262 | 0.064 | 0.088 | 84.780 | 0.068 | 0.086 |
| −4 | 99.449 | 0.092 | 0.180 | 102.564 | 0.095 | 0.181 |
| −3 | 110.138 | 0.105 | 0.285 | 112.532 | 0.108 | 0.288 |
| −2 | 117.504 | 0.114 | 0.399 | 119.432 | 0.116 | 0.404 |
| −1 | 126.044 | 0.121 | 0.521 | 126.335 | 0.123 | 0.527 |
| 0 | 138.127 | 0.132 | 0.653 | 135.202 | 0.130 | 0.657 |
| Organization/Bibliography | Area | Volume (109 m3) | Section (m2) | Depth (m) | Date |
|---|---|---|---|---|---|
| UMU [49] | Mar Menor | 0.580 | 1980–1988 | ||
| IEO [58] | Mar Menor | 0.580 | - | - | 1988 |
| UPCT [4] | Mar Menor | 0.725 | - | - | 2011 |
| UMU/ISMAR [7] | Mar Menor | 0.600 | 2009–2010 | ||
| IMIDA | Mar Menor | 0.653 | - | - | 2009 |
| IMIDA | Mar Menor | 0.657 | - | - | 2016 |
| IEO [14] | Mar Menor | 0.654 | - | - | 2017 |
| UPCT [4] | Encañizada | - | 207 | −0.40 | 5/08/2010 |
| UPCT [4] | Estacio | - | 208 | −5.20 | 13/06/2011 |
| UPCT [4] | Marchamalo | - | 21 | −1.12 | 13/06/2011 |
| IEO | Encañizada | - | 145 | −0.35 | 15/05/2014 |
| IMIDA | Encañizada | - | 11 | −0.10 | 21/03/2017 |
| IMIDA | Encañizada | - | 54 | −0.20 | 28/11/2018 |
| IMIDA | Encañizada | - | 120 | −0.44 | 19/11/2019 |
| IMIDA | Marchamalo | - | 21 | −0.78 | 29/11/2019 |
| IMIDA | Estacio | - | 204 | −5.10 | 30/11/2019 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erena, M.; Domínguez, J.A.; Atenza, J.F.; García-Galiano, S.; Soria, J.; Pérez-Ruzafa, Á. Bathymetry Time Series Using High Spatial Resolution Satellite Images. Water 2020, 12, 531. https://doi.org/10.3390/w12020531
Erena M, Domínguez JA, Atenza JF, García-Galiano S, Soria J, Pérez-Ruzafa Á. Bathymetry Time Series Using High Spatial Resolution Satellite Images. Water. 2020; 12(2):531. https://doi.org/10.3390/w12020531
Chicago/Turabian StyleErena, Manuel, José A. Domínguez, Joaquín F. Atenza, Sandra García-Galiano, Juan Soria, and Ángel Pérez-Ruzafa. 2020. "Bathymetry Time Series Using High Spatial Resolution Satellite Images" Water 12, no. 2: 531. https://doi.org/10.3390/w12020531
APA StyleErena, M., Domínguez, J. A., Atenza, J. F., García-Galiano, S., Soria, J., & Pérez-Ruzafa, Á. (2020). Bathymetry Time Series Using High Spatial Resolution Satellite Images. Water, 12(2), 531. https://doi.org/10.3390/w12020531