A Novel Method for the Automatic Extraction of Quality Non-Planar River Cross-Sections from Digital Elevation Models


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
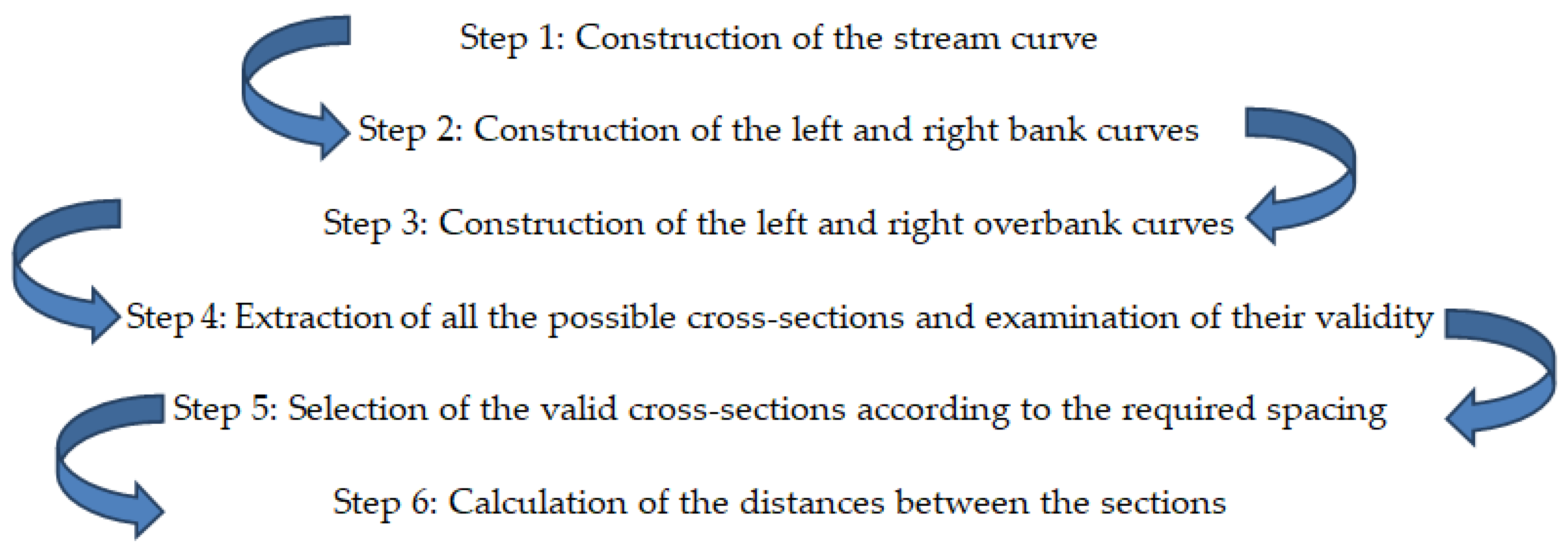
2. The Proposed Approach
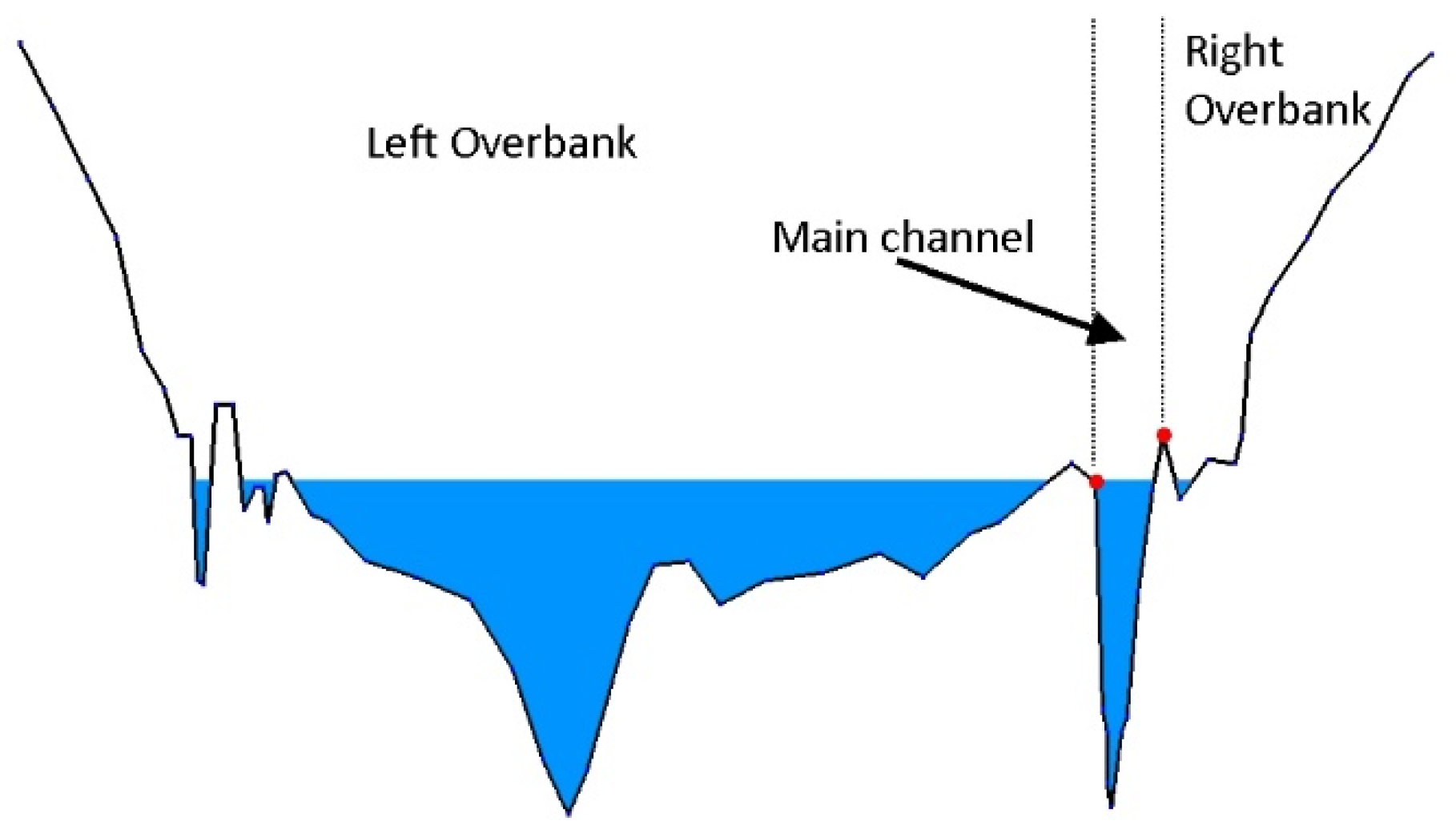
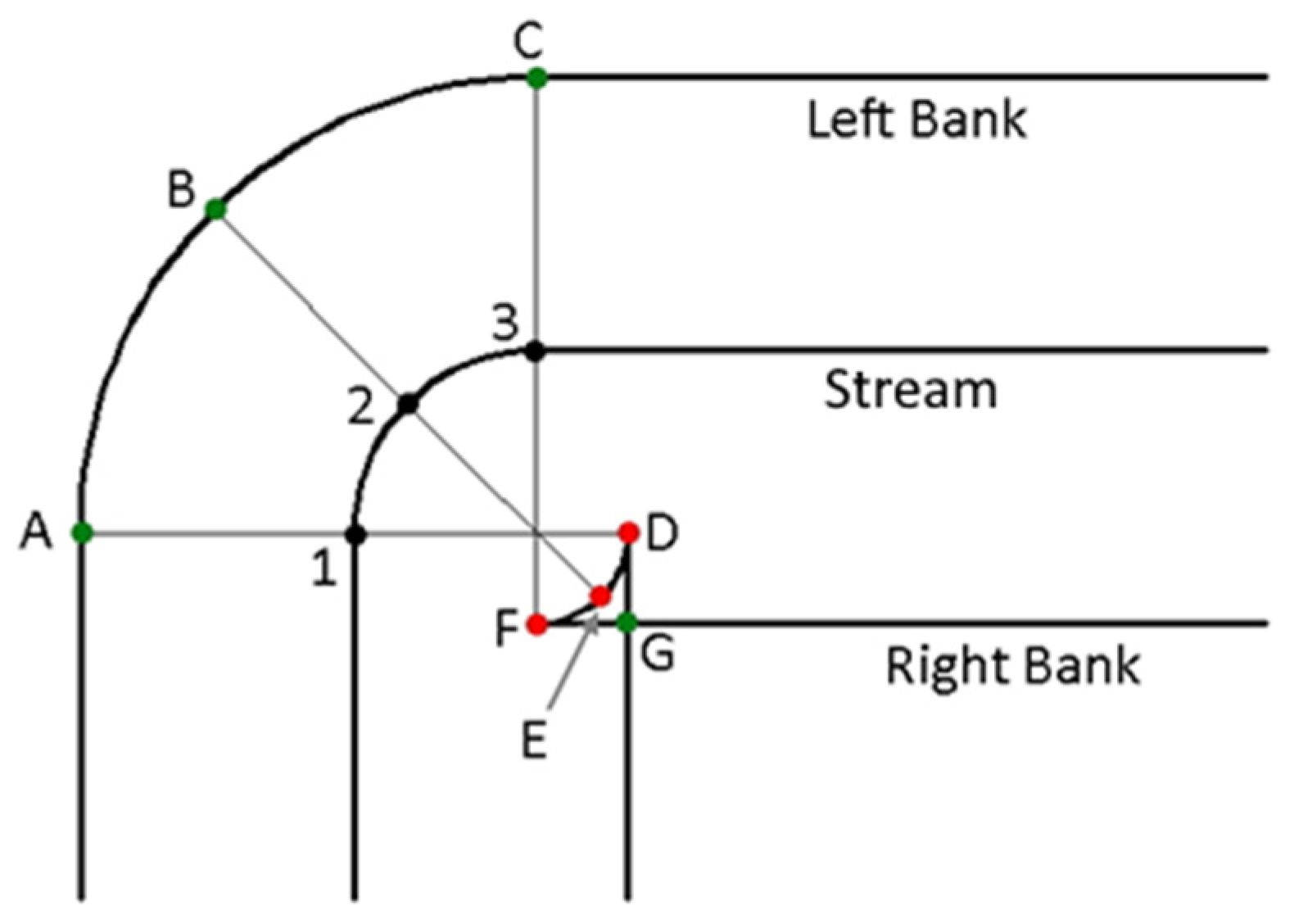
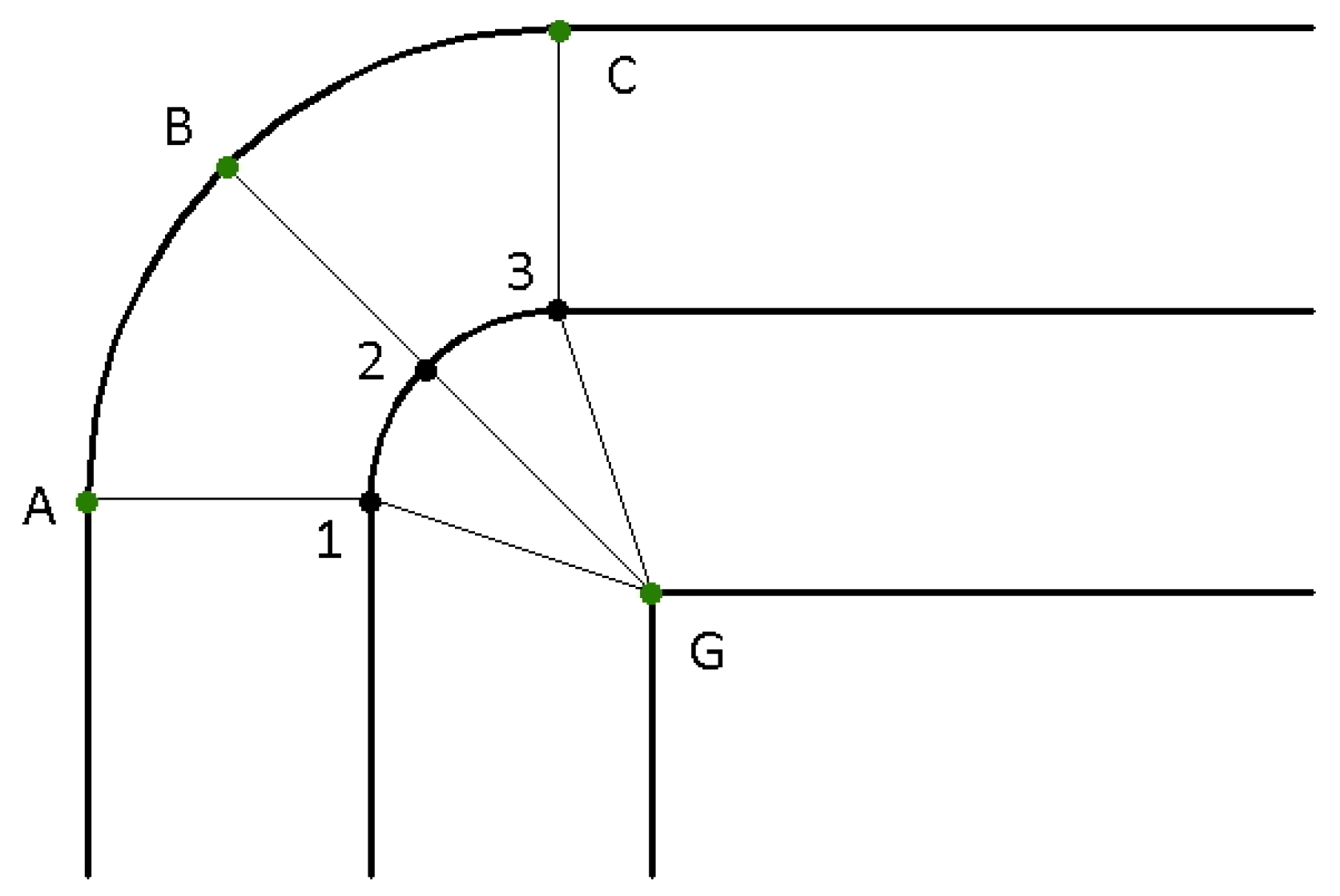
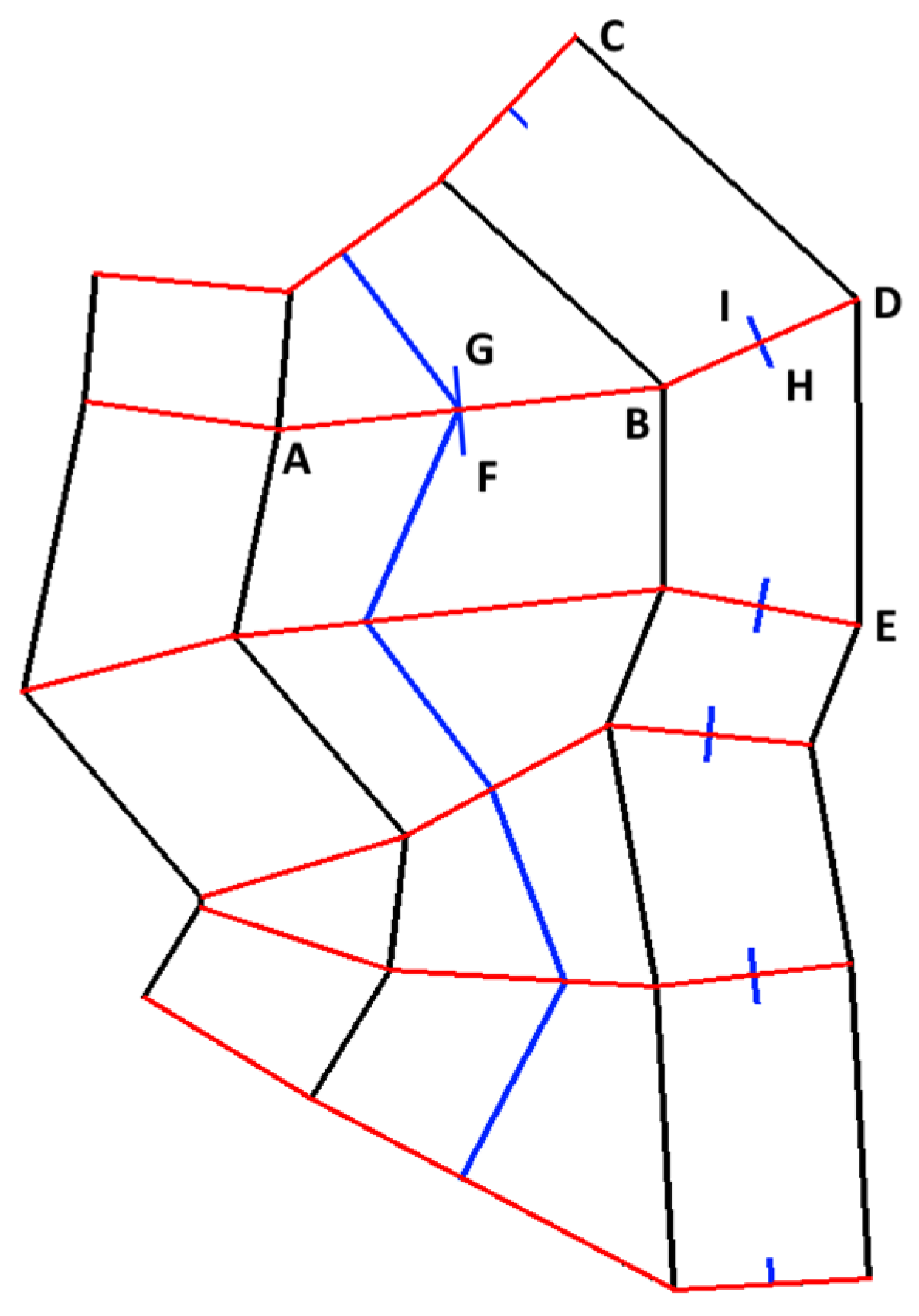
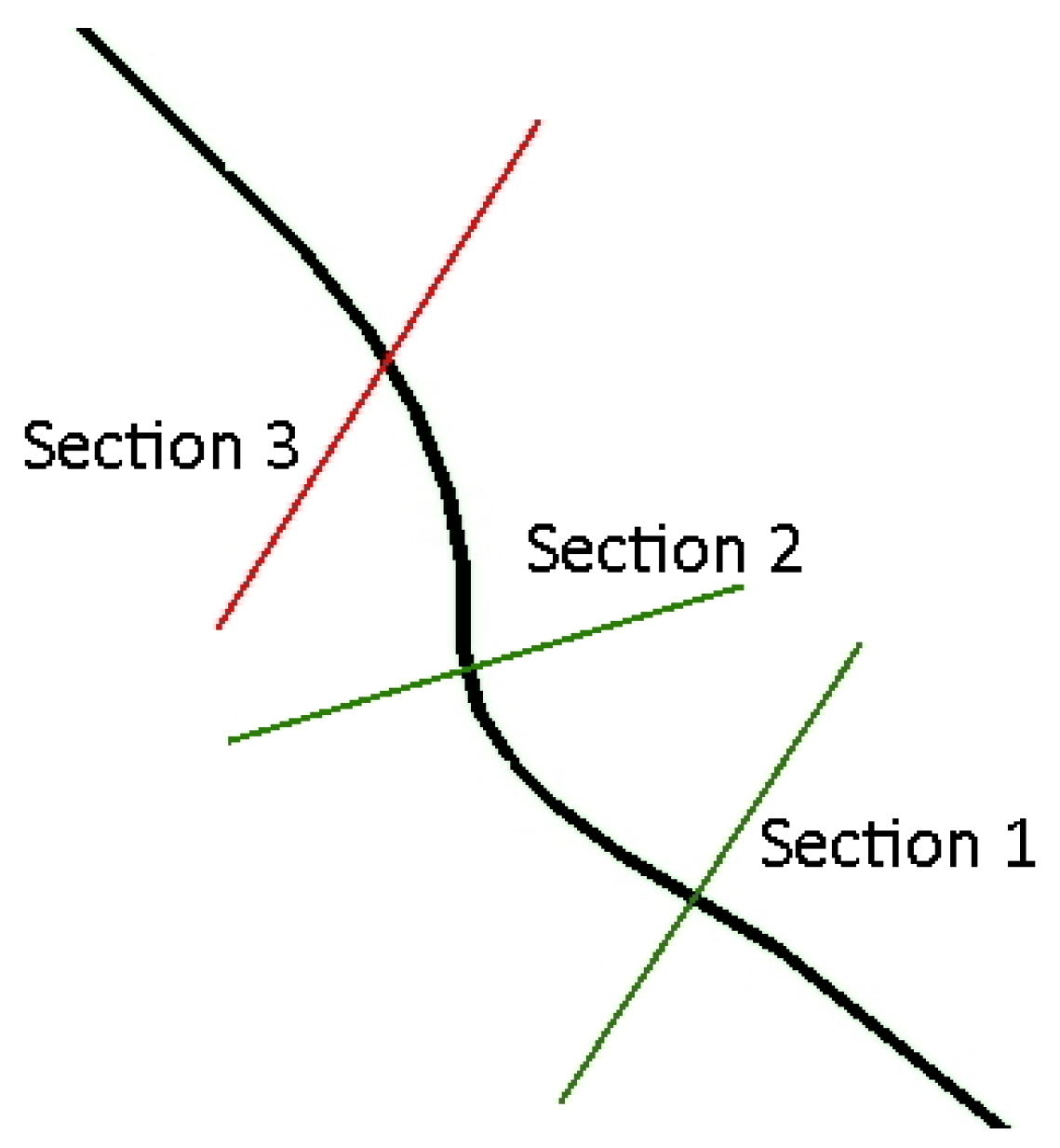
- the main channel of each cross-section should be normal to the stream curve;
- the limits of the main channel (banks) for each section should lie on the left and right bank curves, respectively;
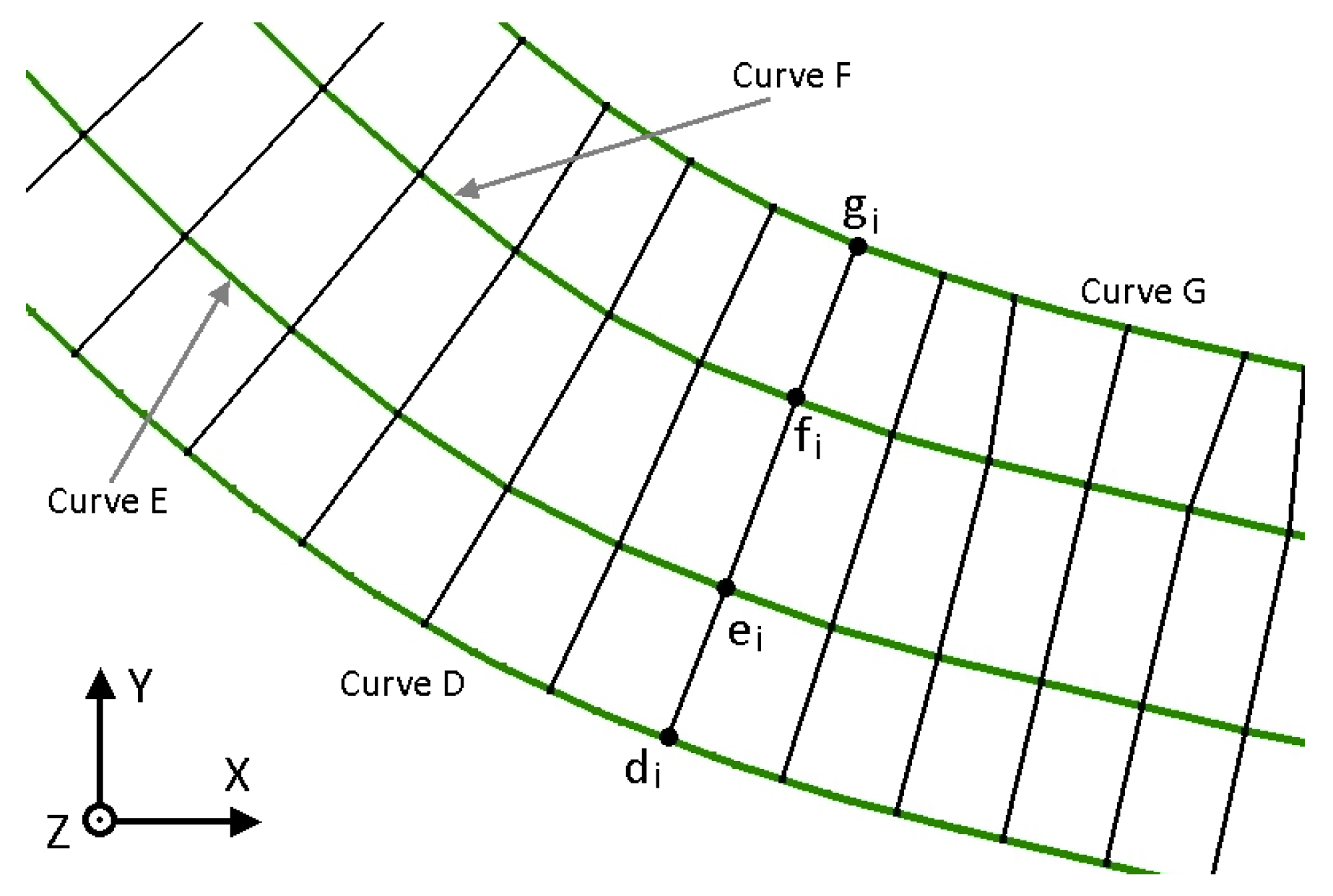
- the projection of each point of either the left or the right bank curve on the stream curve should be the corresponding point (point with the same index) of the stream curve;
- the ending points of each section should be on the left and right overbank curves;
- the projection of each point of the left overbank curve on the left bank curve should be the corresponding point of the left bank curve; and, finally,
- the projection of each point of the right overbank curve on the right bank curve should be the corresponding point of the right bank curve.
2.1. Construction of the Stream Curve
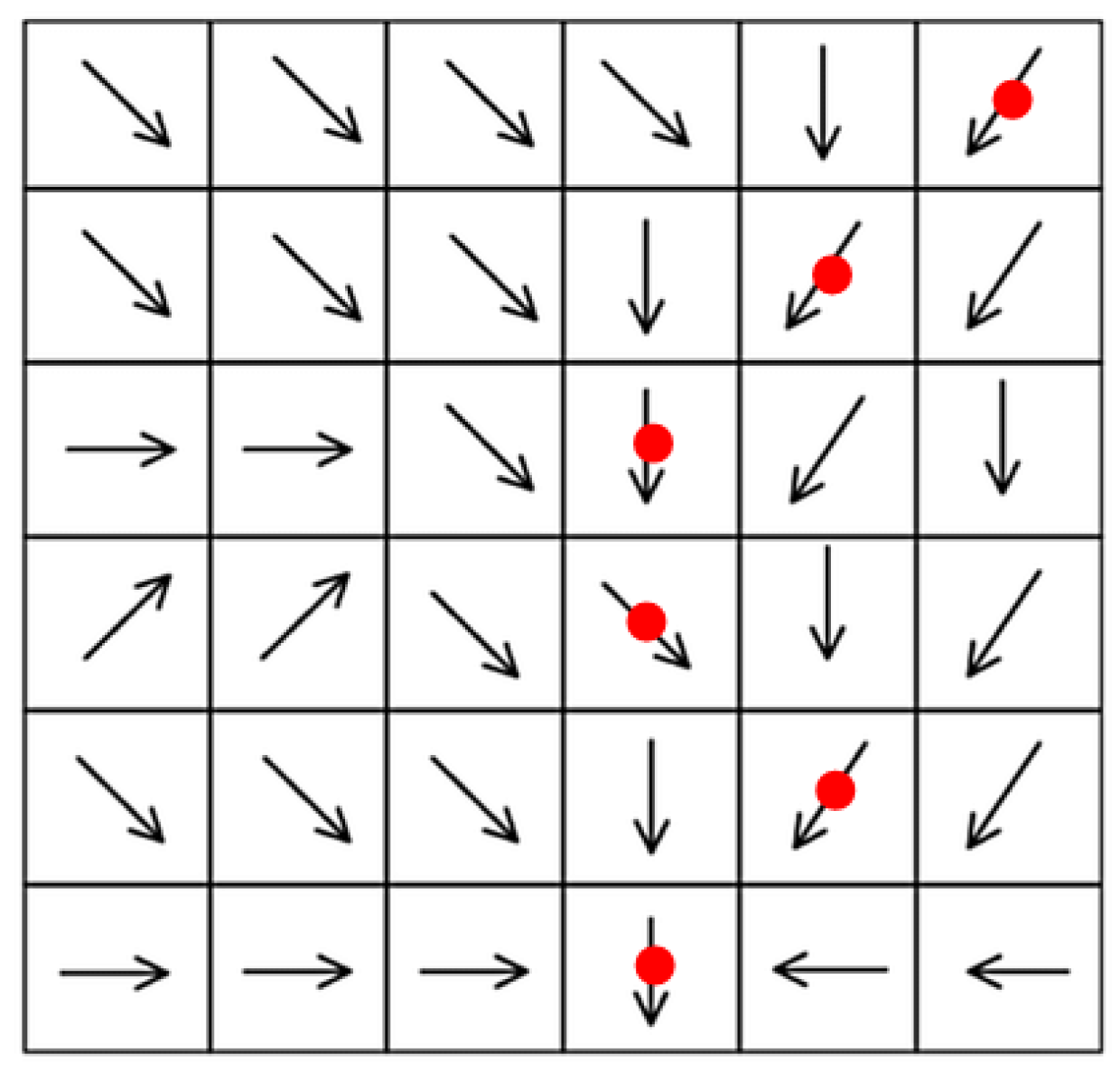
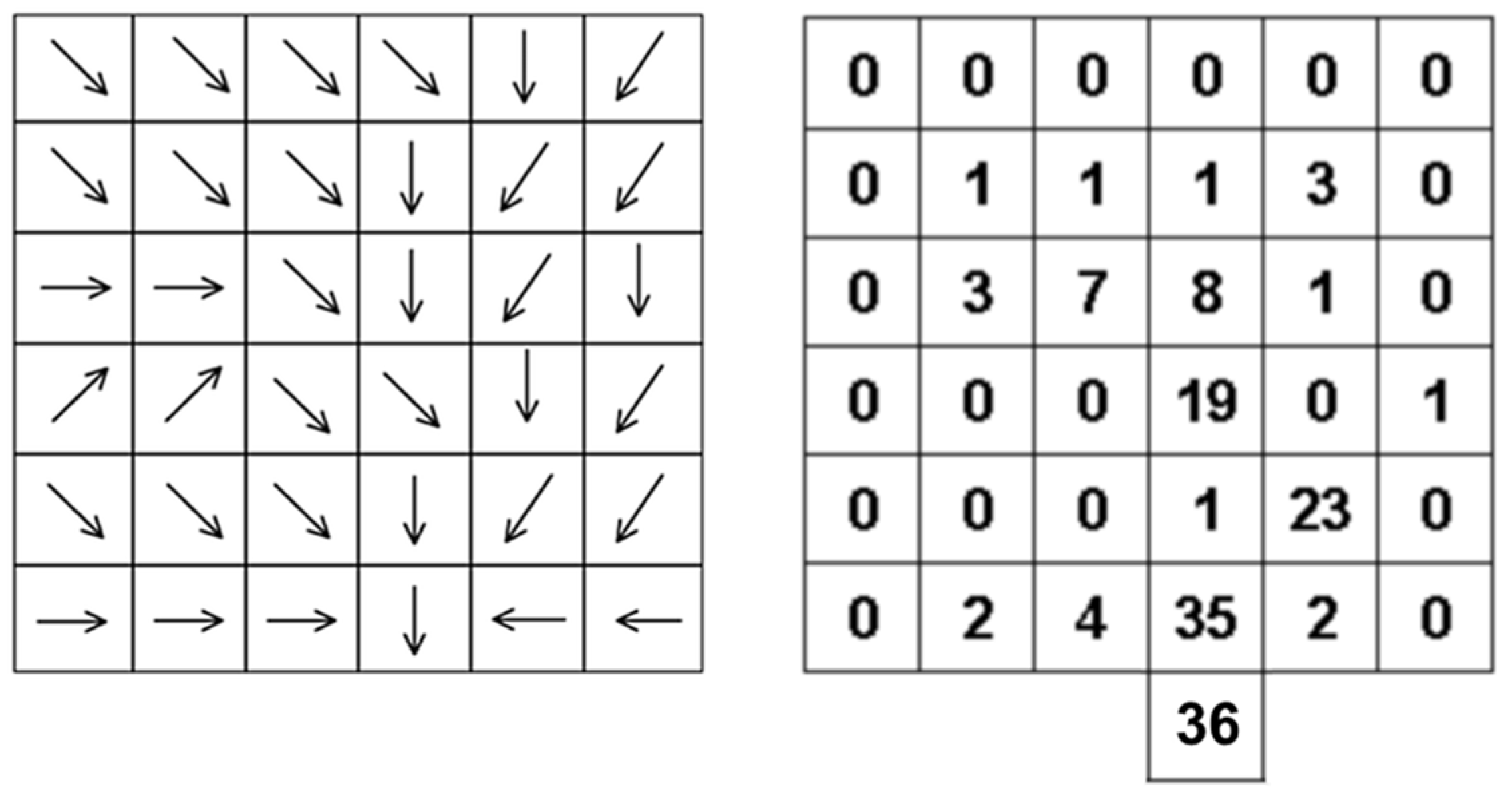
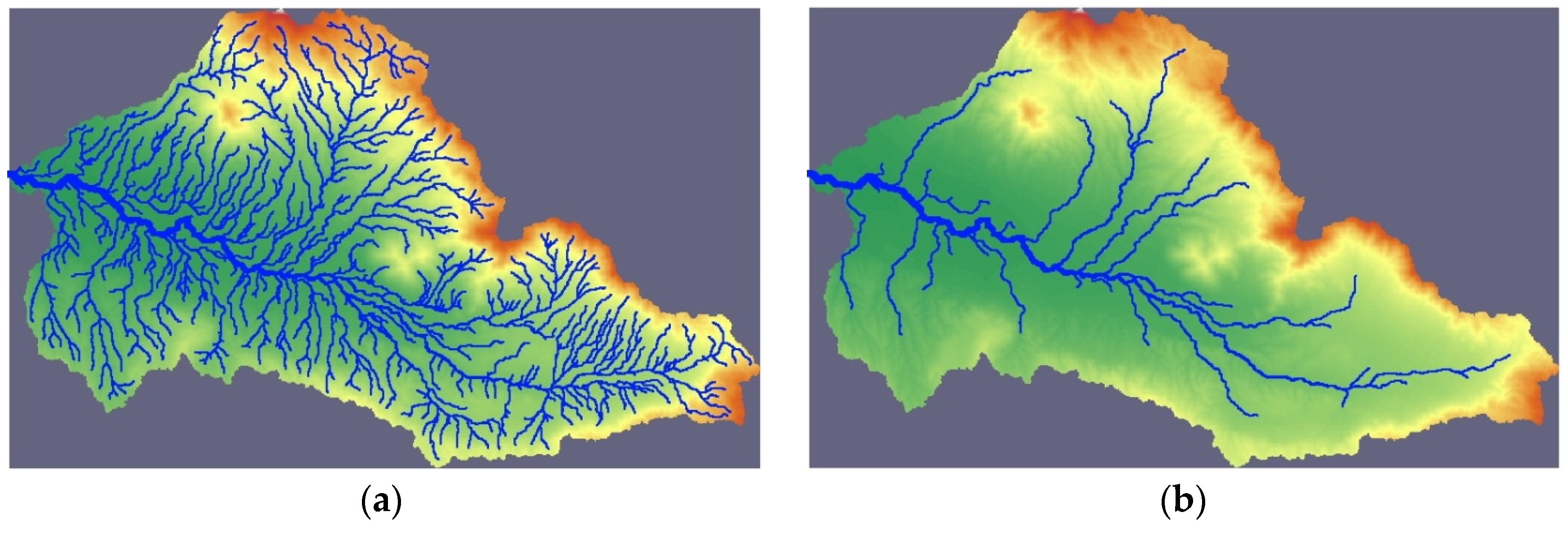
2.1.1. Stream Selection
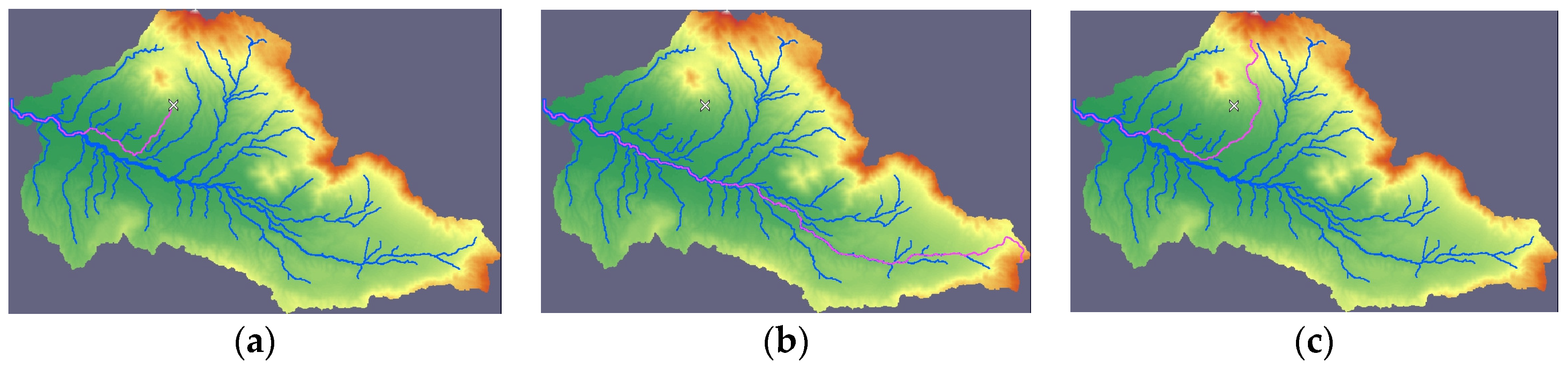
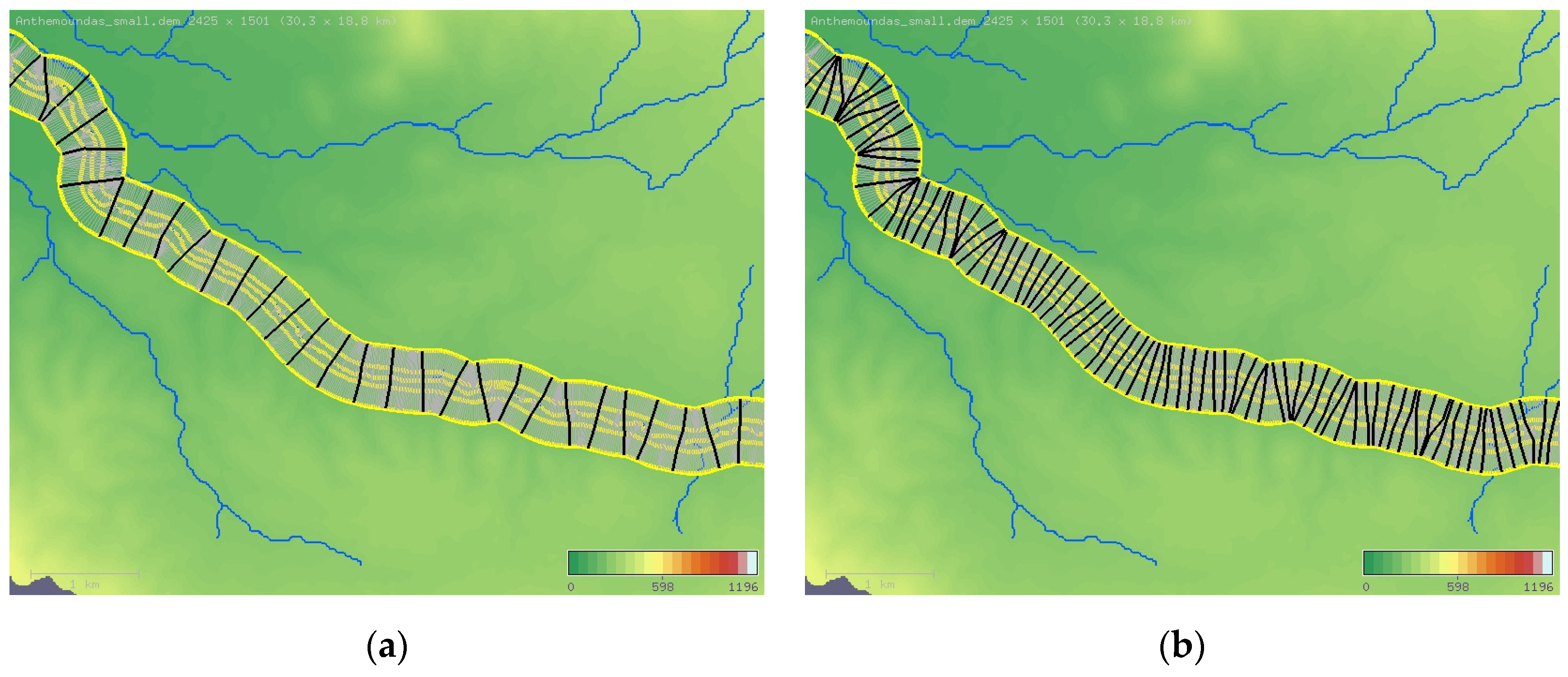
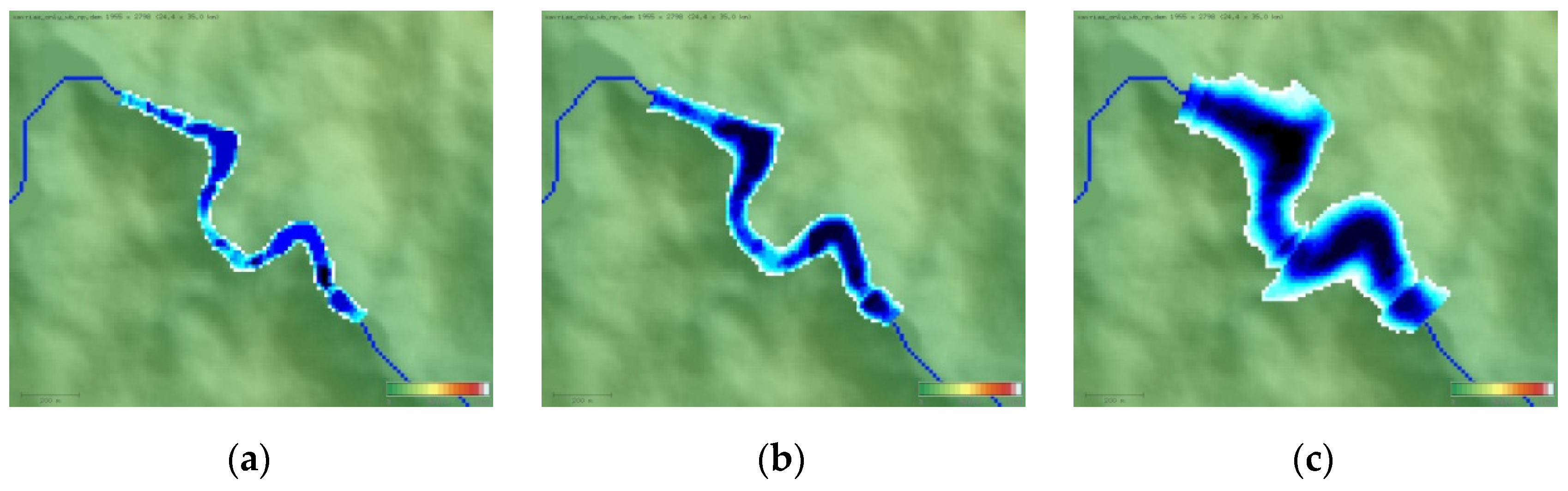
- Route Downstream: This is the simplest process to apply. One cell of the DEM is selected, and then the rest of the path is determined by following the flow directions as described above. Figure 6a shows the stream defined applying this option. The river network appears in blue color, while the selected stream, which appears in purple, extends from the point of selection (white X) until the exit point (pour point) at the western edge of the drainage basin.
- Main Stream: After one cell is selected, the path is determined by following the flow directions as described above until the exit point is reached. Then, the path is reversely followed from downstream towards upstream. At every junction cell, the path followed is the one with the higher accumulation value. Figure 6b shows the stream defined applying this option for the same point of selection (white X) like before. It extends from the watershed till the exit point.
- Nearest Stream: After one cell is selected, the nearest visible stream is searched. The visible streams depend, as explained, on the value of the accumulation threshold value. The path of the stream found is calculated in both directions. When a junction is reached, while calculating the upstream part, the path selected is the one with the highest accumulation value. Figure 6c shows the stream defined applying this option for the same point (white X) as in the previous two options. The stream extends once again from the watershed till the exit point.
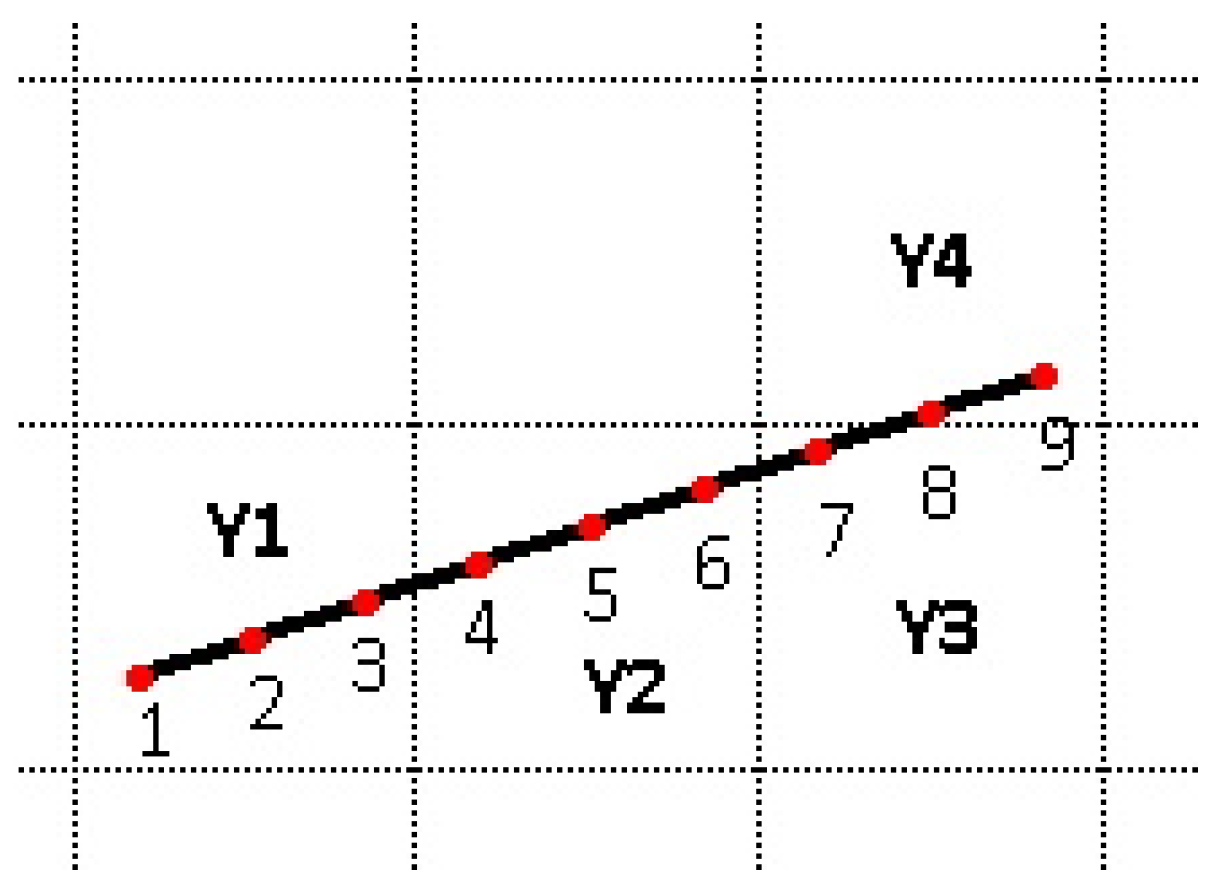
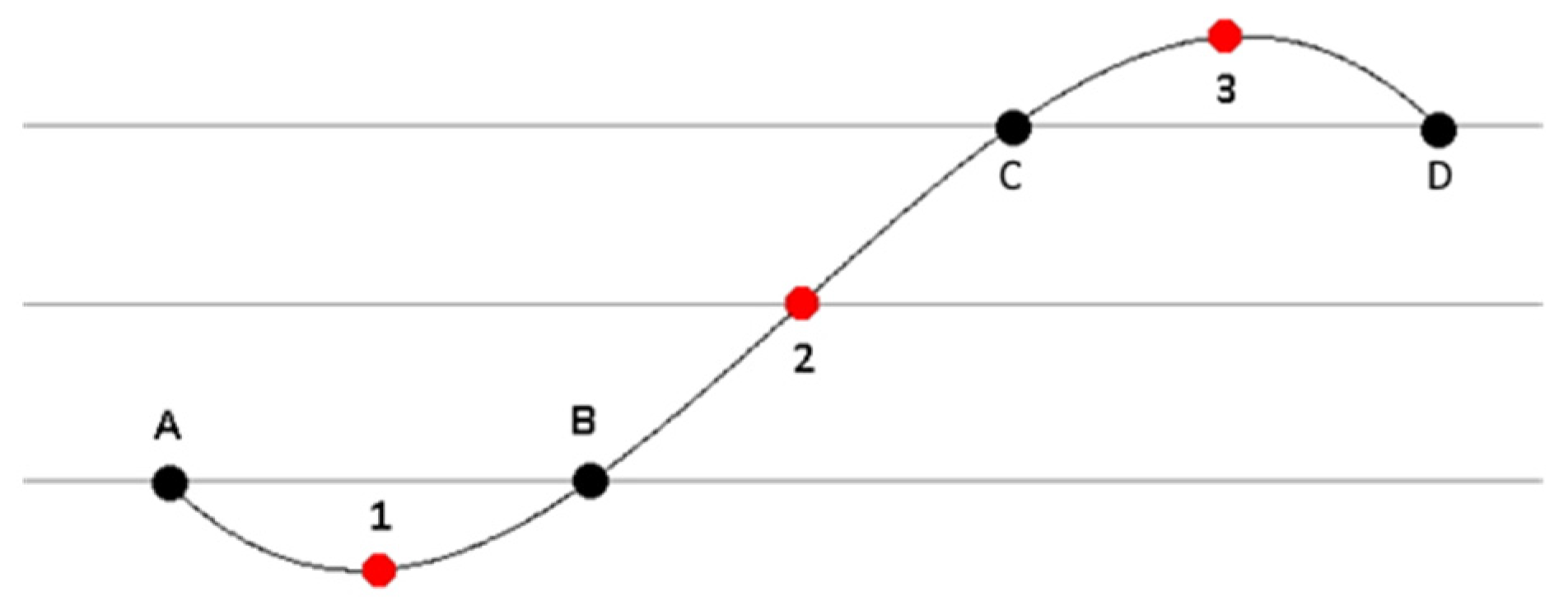
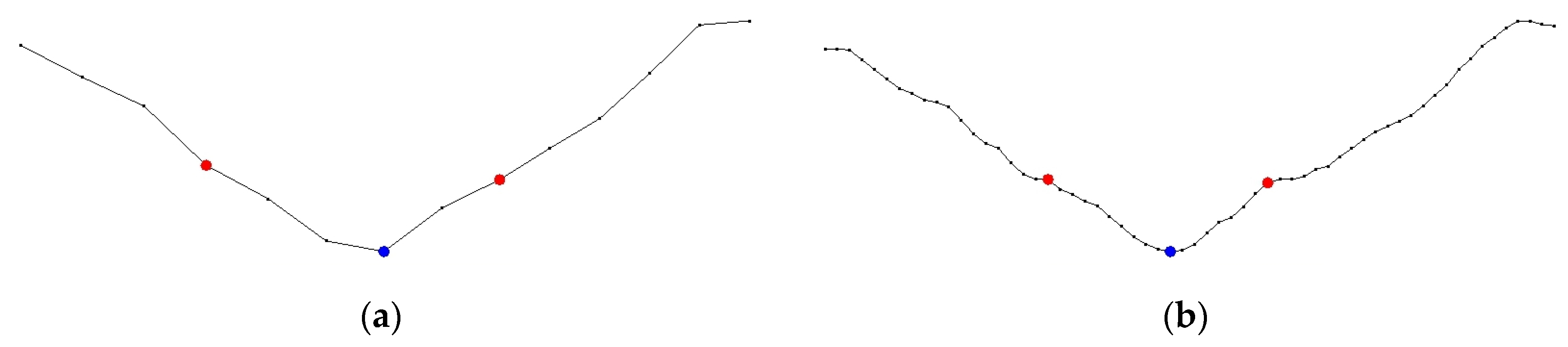
2.1.2. Stream Smoothing
2.2. Construction of the Left and Right Overbank Curves
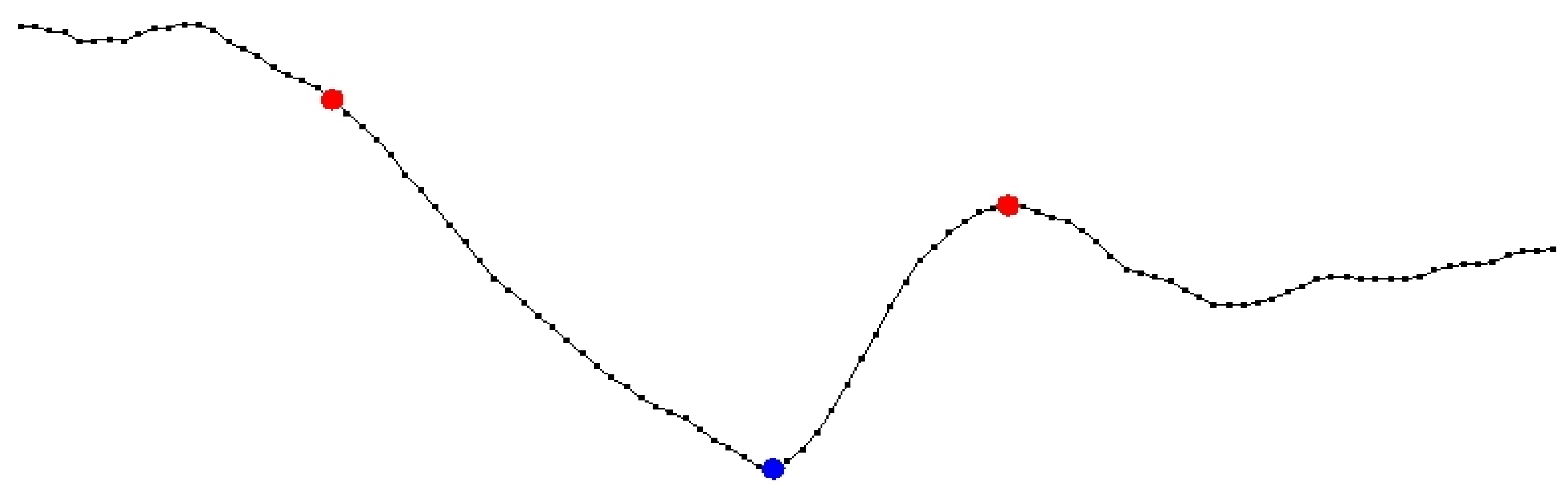
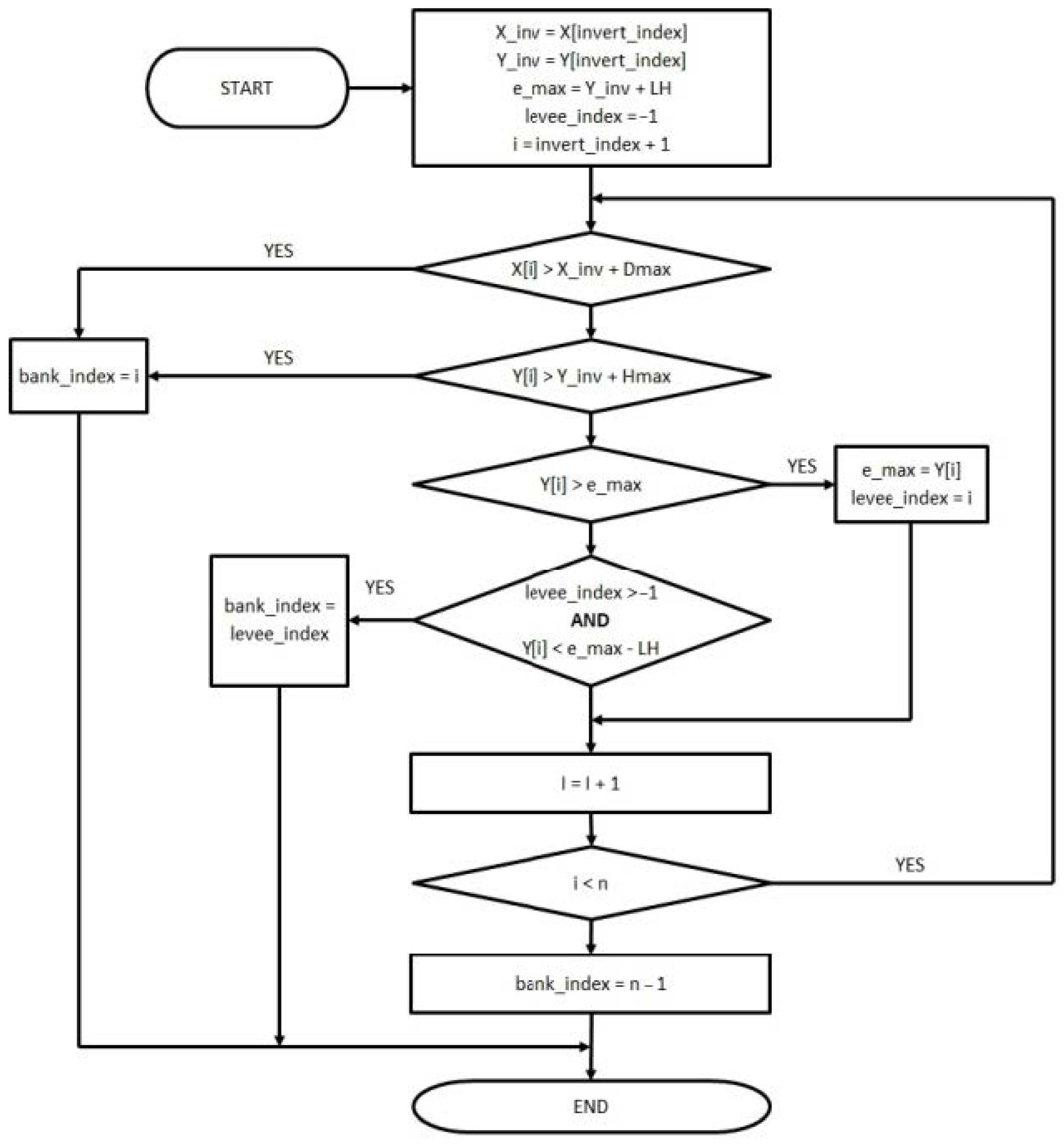
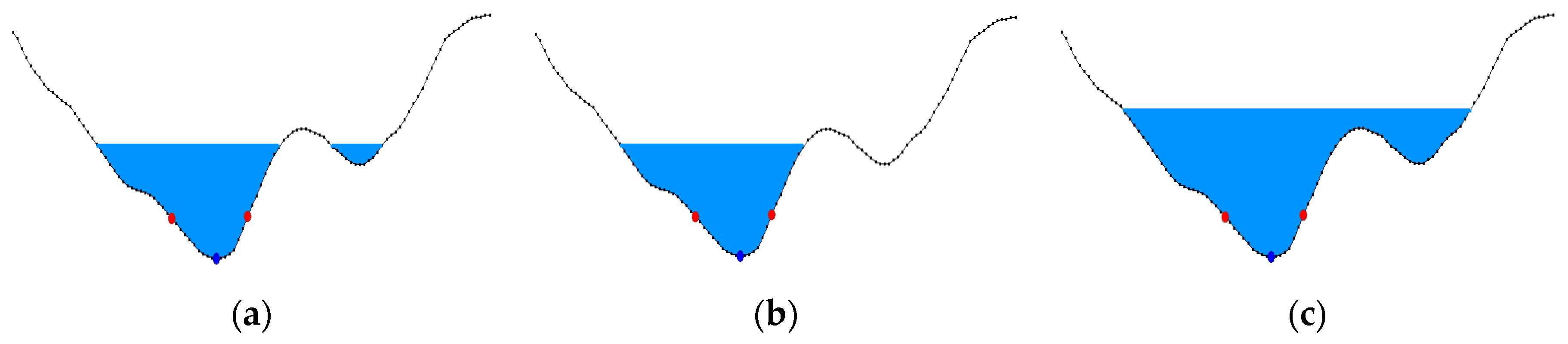
2.2.1. Automatic Detection of Left and Right Bank
- A. Levee detection: Moving away from the invert, if two points p1 and p2 with elevations h1 and h2 are found for which h2 < h1 − HL, then p1 is considered to be the bank.
- B. Maximum height from invert: Moving away from the invert, if one point p with elevation h is found for which h > hinvert + Hmax, then p is considered to be the bank.
- C. Maximum horizontal distance from invert: Moving away from the invert, if one point p with distance from the invert is d > Dmax, then p is considered to be the bank.
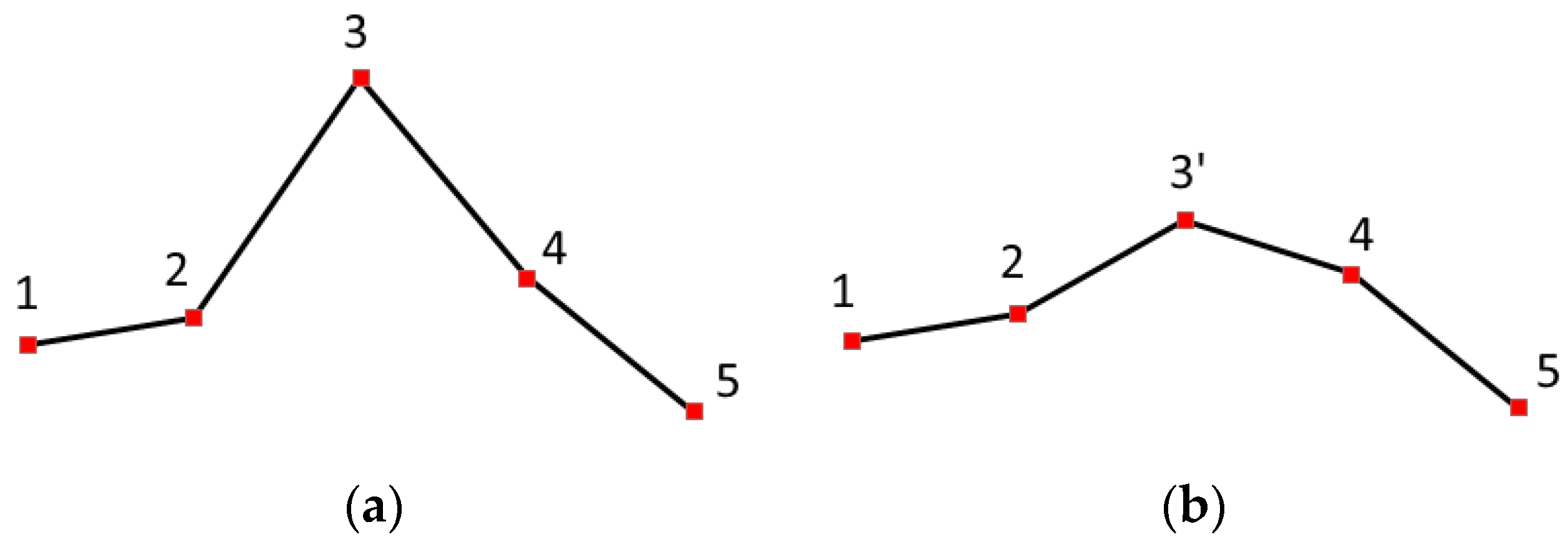
2.2.2. Banks’ Curve Smoothing
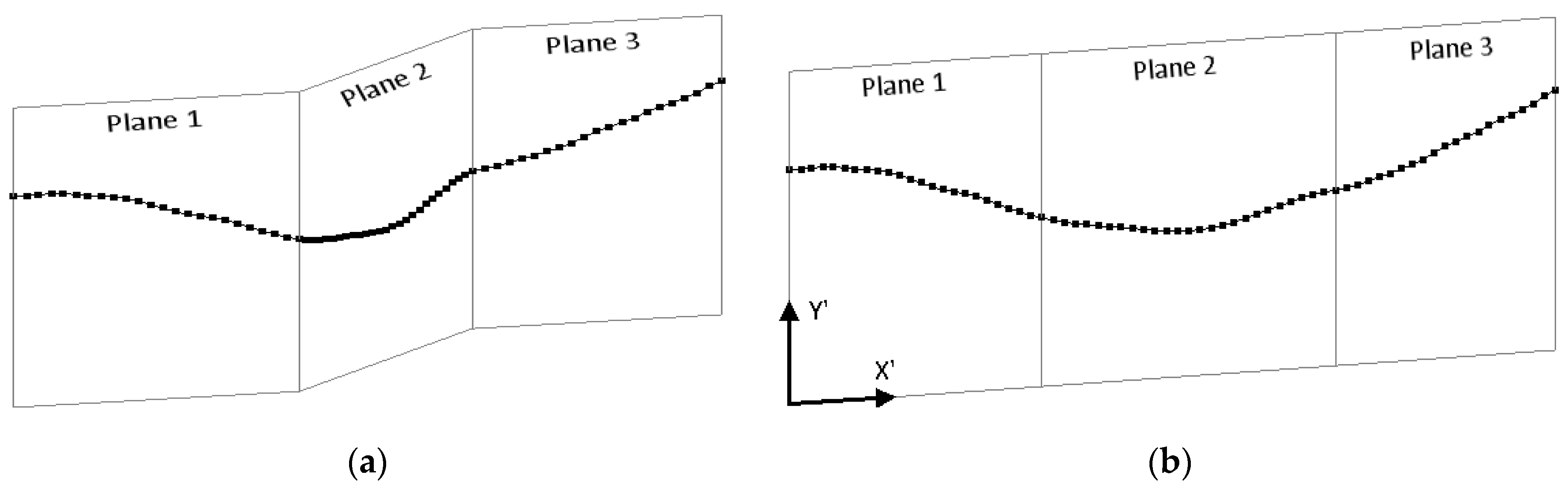
2.3. Construction of the Left and Right Overbank Curves
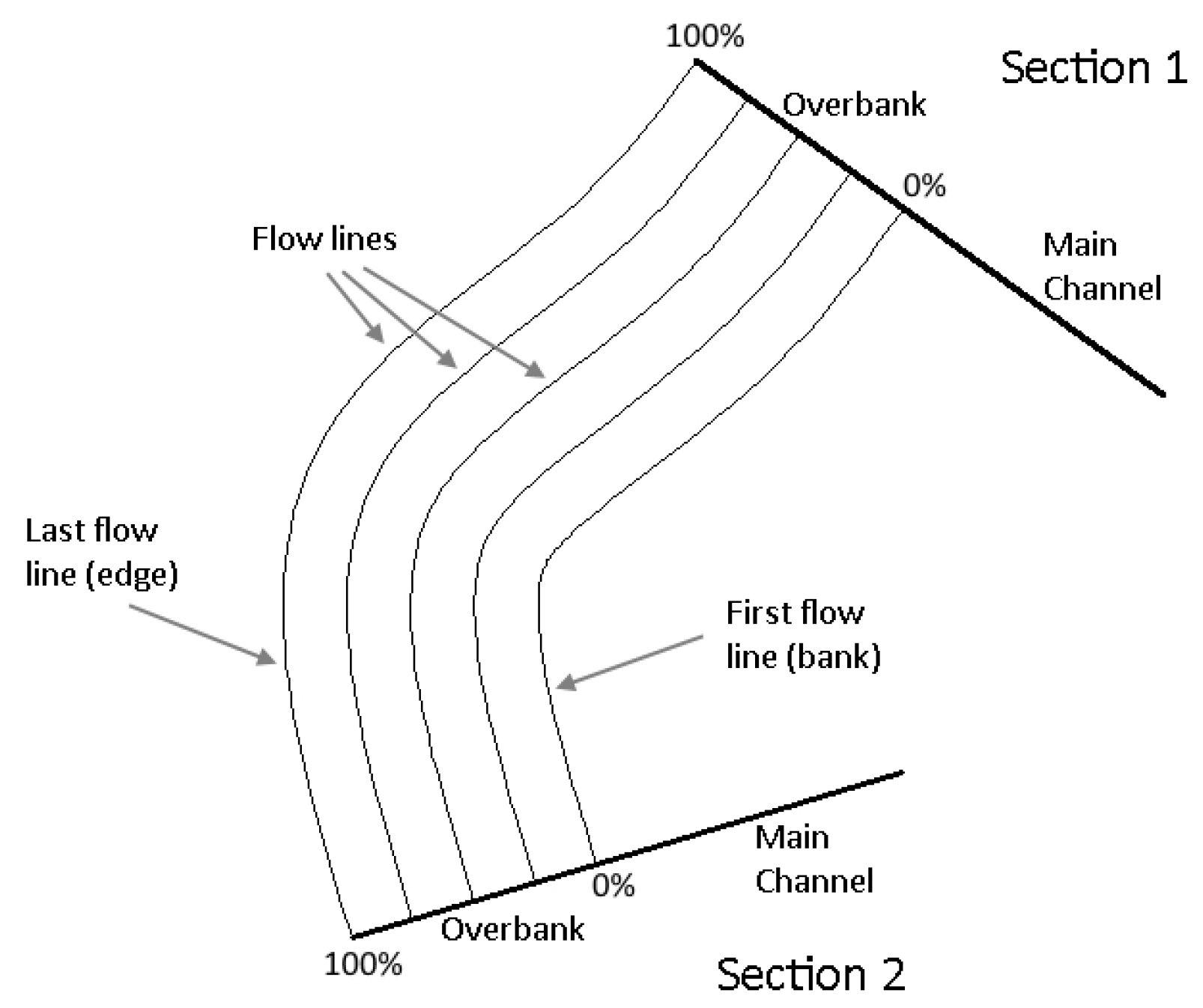
2.4. Extraction of Cross-Sections
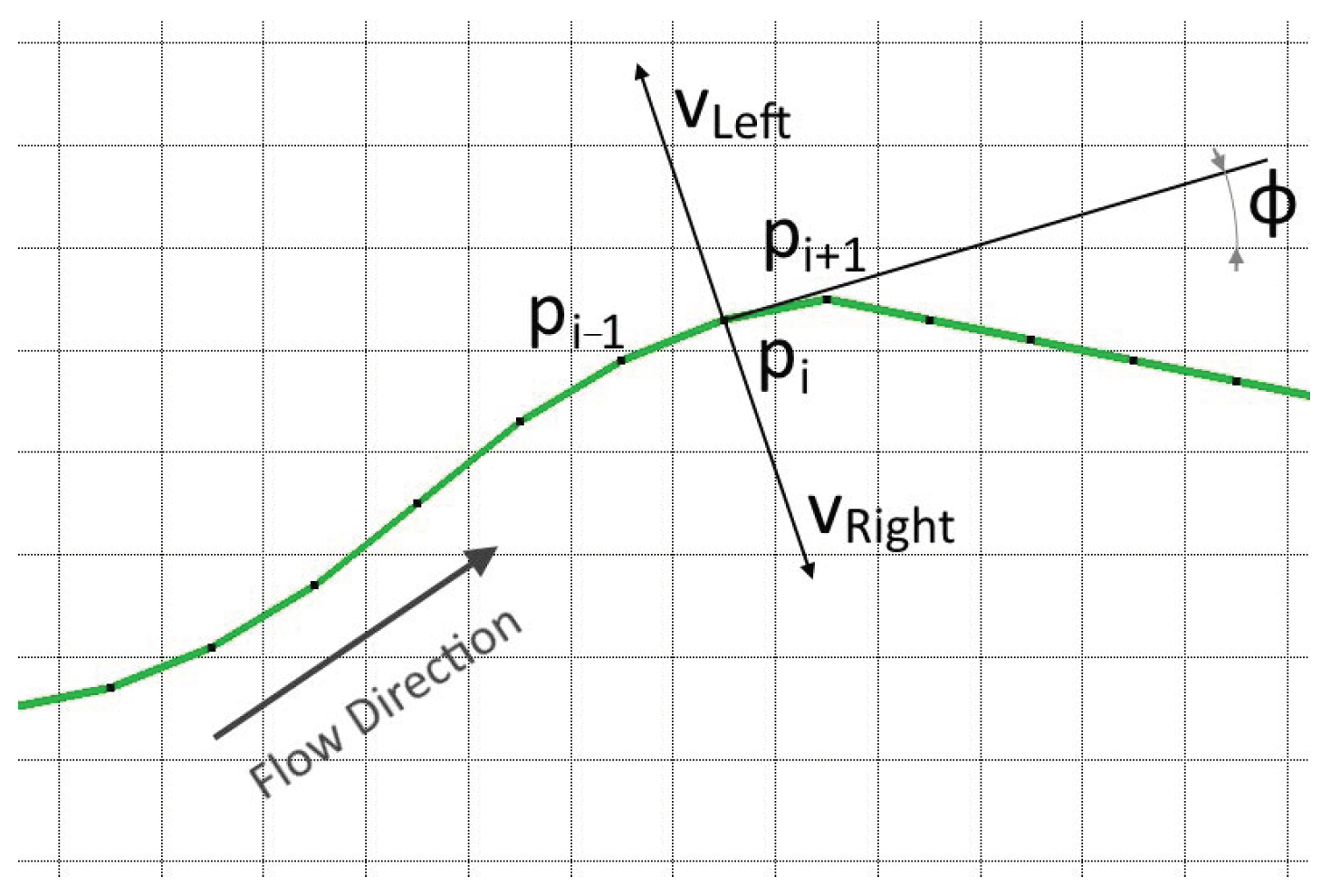
2.4.1. Examination of the Angle between the Cross-Section and the Stream
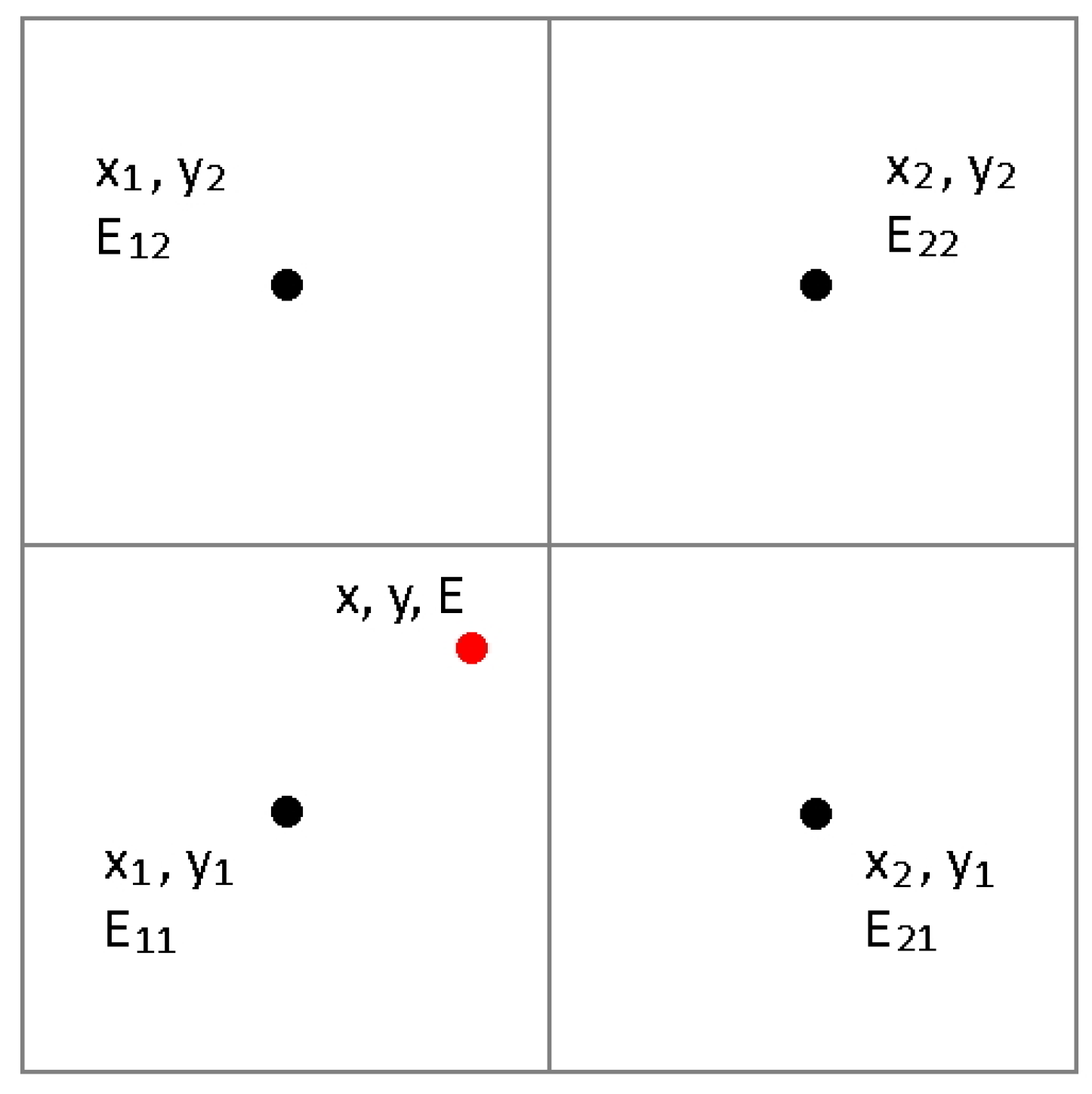
2.4.2. Calculation of the Coordinates of the Cross-Section
2.4.3. Examination of the Maximum Water Depth of the Cross-Section
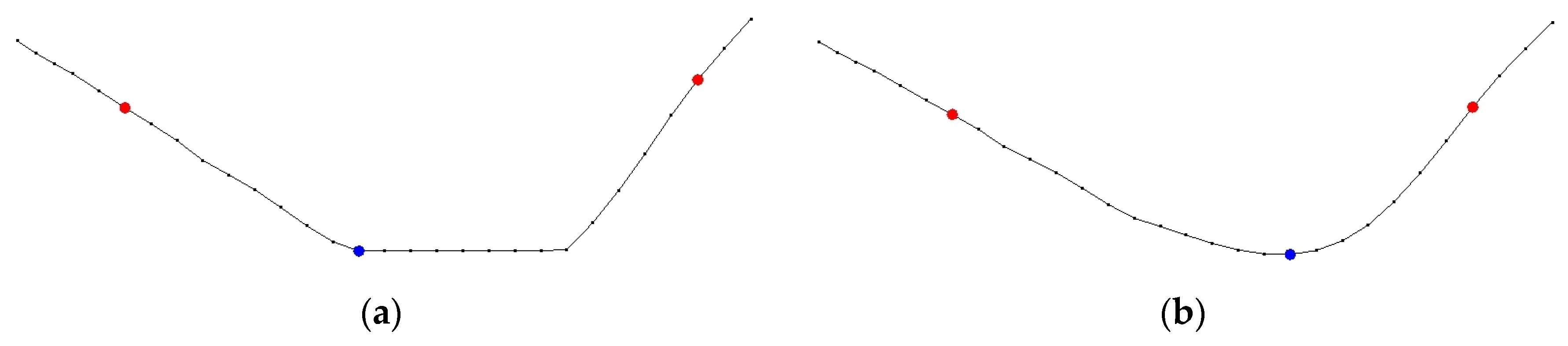
2.4.4. Channel Bed Restoration
2.4.5. Adding the Levees
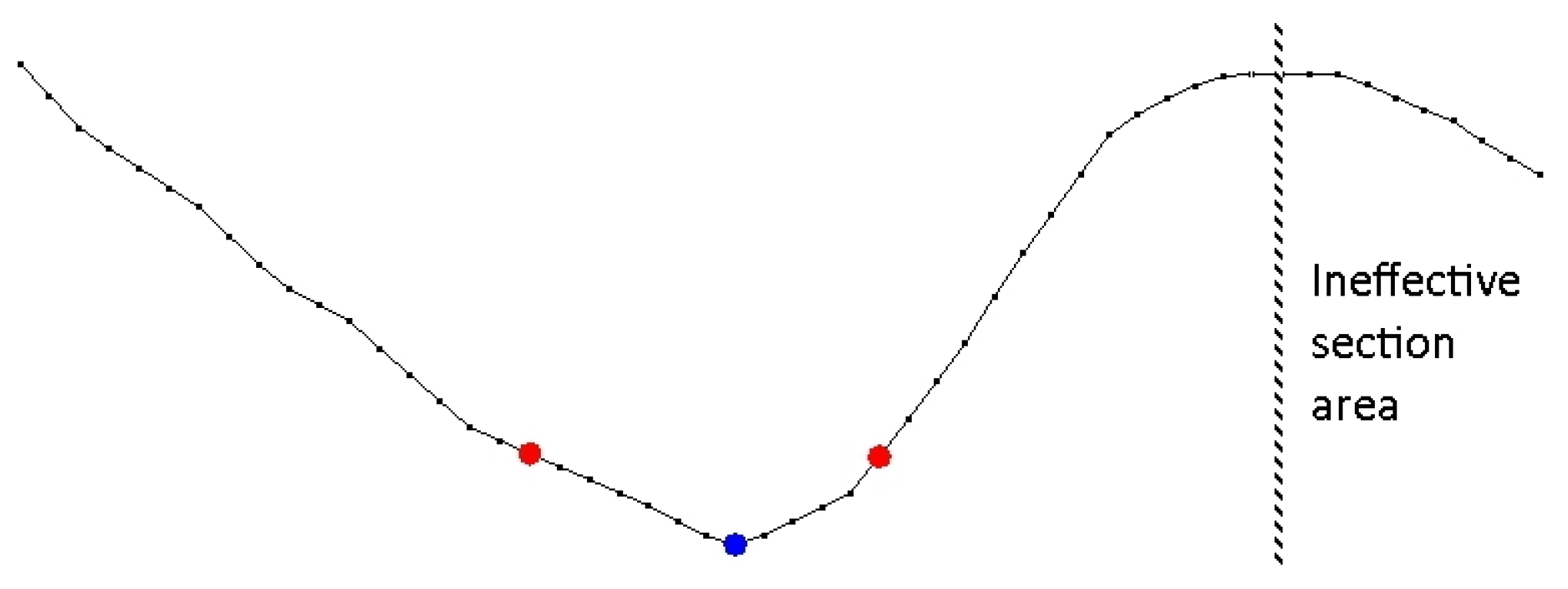
2.4.6. Removal of Ineffective Areas
2.5. Selection of the Cross-Sections
2.6. Calculation of the Distances between the Sections
3. Results
3.1. First Set—Non Planar Cross-Sections
3.2. Second Set—Planar Cross-Sections
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bures, L.L.; Roub, R.; Sychová, P.; Gdulova, K.; Doubalova, J. Comparison of bathymetric data sources used in hydraulic modeling of floods. J. Flood Risk Manag. 2018, 12. [Google Scholar] [CrossRef]
- Domeneghetti, A. On the use of SRTM and altimetry data for flood modeling in datasparse regions. Water Resour. Res. 2016, 52, 2901–2907. [Google Scholar] [CrossRef]
- NASA. Shuttle Radar Topography Mission (SRTM); NASA: Washington, DC, USA, 2000. [Google Scholar]
- Charlton, M.E.; Large, A.R.G.; Fuller, I.C. Application of airborne LiDAR in river environments: The River Coquet, Northumberland, UK. Earth Surf. Process. Landf. 2003, 28, 299–306. [Google Scholar] [CrossRef]
- Ludwig, R.; Schneider, P. Validation of digital elevation models from SRTM X-SAR for applications in hydrologic modeling. ISPRS J. Photogramm. Remote Sens. 2006, 60, 339–358. [Google Scholar] [CrossRef]
- Walker, J.P.; Willgoose, G.R. On the effect of digital elevation model accuracy on hydrology and geomorphology. Water Resour. Res. 1999, 35, 2259–2268. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Wang, X. A cross-scale comparison of drainage basin characteristics derived from digital elevation models. Earth Surf. Process. Landf. 1999, 24, 557–562. [Google Scholar] [CrossRef]
- Casas, A.; Benito, G.; Thorndycraft, V.R.; Rico, M. The topographic data source of digital terrain models as a key element in the accuracy of hydraulic flood modeling. Earth Surf. Process. Landf. 2006, 31, 444–456. [Google Scholar] [CrossRef]
- Schumann, G.; Matgen, P.; Cutler, M.E.J.; Black, A.; Hoffmann, L.; Pfister, L. Comparison of remotely sensed water stages from LiDAR, topographic contours and SRTM. ISPRS J. Photogramm. Remote Sens. 2008, 63, 283–296. [Google Scholar] [CrossRef]
- Ali, A.M.; Solomatine, D.P.; Di Baldassarre, G. Assessing the impact of different sources of topographic data on 1-D hydraulic modeling of floods. Hydrol. Earth Syst. Sci. 2015, 19, 631. [Google Scholar] [CrossRef]
- Mersel, M.K.; Smith, L.C.; Andreadis, K.M.; Durand, M.T. Estimation of river depth from remotely sensed hydraulic relationships. Water Resour. Res. 2013, 49, 3165–3177. [Google Scholar] [CrossRef]
- Yan, K.; Di Baldassarre, G.; Solomatine, D.P. Exploring the potential of SRTM topographic data for flood inundation under uncertainty. J. Hydroinform. 2013, 15, 849–861. [Google Scholar] [CrossRef]
- Andersson, E.; Hietala, S. Application of a New Method to Improve River Cross-Sections Derived from Satellite Images; Degree Project in Technology: Stockholm, Sweden, 2018. [Google Scholar]
- Pramanik, N.; Panda, R.K.; Sen, D. One dimensional hydrodynamic modeling of river flow using DEM extracted river cross-sections. Water Resour. Manag. 2010, 24, 835–852. [Google Scholar] [CrossRef]
- Hydrologic Engineering Center. HEC-RAS River Analysis System; Version 5.0.7.; Hydrologic Engineering Center: Davis, CA, USA, 2019. [Google Scholar]
- Environmental Systems Research Institute (ESRI). ArcGIS Desktop 10.8; Environmental Systems Research Institute (ESRI): Redlands, CA, USA, 2020. [Google Scholar]
- Hydrologic Engineering Center. HEC-RAS 2D Modeling User’s manual; Hydrologic Engineering Center: Davis, CA, USA, 1991. [Google Scholar]
- Samuels, P.G. Cross-section location in one-dimensional models. In Proceedings of International Conference on River Flood Hydraulics; White, W.R., Ed.; John Wiley: Chichester, UK, 1990; pp. 339–350. [Google Scholar]
- Castellarin, A.; Di Baldassarre, G.; Bates, P.D.; Brath, A. Optimal cross-sectional spacing in Preissmann scheme 1D hydrodynamic models. J. Hydraul. Eng. 2009, 135, 96–105. [Google Scholar] [CrossRef]
- Gichamo, T.Z.; Popescu, I.; Jonoski, A.; Solomatine, D. River cross-section extraction from the ASTER global DEM for flood modeling. Environ. Modeling Softw. 2012, 31, 37–46. [Google Scholar] [CrossRef]
- ASTER GDEM. ASTER Global DEM Validation Summary Report. METI/ERSDAC, NASA/LPDAAC, USGS/EROS; 2009. Available online: https://asterweb.jpl.nasa.gov/gdem.asp (accessed on 5 August 2019).
- Pilotti, M. Extraction of cross-sections from digital elevation model for one-dimensional dam-break wave propagation in mountain valleys. Water Resour. Res. 2016, 52, 52–68. [Google Scholar] [CrossRef]
- Petikas, I.; Keramaris, E.; Kanakoudis, V. Calculation of Multiple Critical Depths in Open Channels Using an Adaptive Cubic Polynomials Algorithm. Water 2020, 12, 799. [Google Scholar] [CrossRef]
- Petikas, I. Development and Application of Innovative Methodologies, Software and Algorithms (ACPA, BECPA, ARHA, HYDROLOGY) for the Precise Calculation of Hydraulic Flow Characteristics in the Design of Flood Mitigation Works. Ph.D. Thesis, Civil Engineering Department, University of Thessaly, Thessaly, Greece, 2020. (in progress). [Google Scholar]
- Fairfield, J.; Leymarie, P. Drainage Networks from Grid Digital Elevation Models. Water Resour. Res. 1991, 27, 709–771. [Google Scholar] [CrossRef]
- Tarboton, D.G. A new method for the determination of flow directions and upslope areas in grid digital elevation models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef]
- Planchon, O.; Darboux, F. A fast, simple and versatile algorithm to fill the depressions of digital elevation models. Catena 2001, 46, 159–176. [Google Scholar] [CrossRef]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information system analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Tarboton, D.; Ames, D.P. Advances in the Mapping of Flow Networks from Digital Elevation Data. In Proceedings of the World Water and Environmental Resources Congress, Orlando, FL, USA, 20–24 May 2001; pp. 1–10. [Google Scholar]
- Smith, M.J.; Clark, C.D. Methods for the visualization of digital elevation models for landform mapping. Earth Surf. Process. Landf. 2005, 30, 885–900. [Google Scholar] [CrossRef]
- JAXA. Advanced Land Observing Satellite Phased Array Type L-Band Synthetic Aperture Radar (ALOS PALSAR); JAXA: Tokyo, Japan, 2006. [Google Scholar]





































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petikas, I.; Keramaris, E.; Kanakoudis, V. A Novel Method for the Automatic Extraction of Quality Non-Planar River Cross-Sections from Digital Elevation Models. Water 2020, 12, 3553. https://doi.org/10.3390/w12123553
Petikas I, Keramaris E, Kanakoudis V. A Novel Method for the Automatic Extraction of Quality Non-Planar River Cross-Sections from Digital Elevation Models. Water. 2020; 12(12):3553. https://doi.org/10.3390/w12123553
Chicago/Turabian StylePetikas, Ioannis, Evangelos Keramaris, and Vasilis Kanakoudis. 2020. "A Novel Method for the Automatic Extraction of Quality Non-Planar River Cross-Sections from Digital Elevation Models" Water 12, no. 12: 3553. https://doi.org/10.3390/w12123553
APA StylePetikas, I., Keramaris, E., & Kanakoudis, V. (2020). A Novel Method for the Automatic Extraction of Quality Non-Planar River Cross-Sections from Digital Elevation Models. Water, 12(12), 3553. https://doi.org/10.3390/w12123553