Rainfall Prediction with AMSR–E Soil Moisture Products Using SM2RAIN and Nonlinear Autoregressive Networks with Exogenous Input (NARX) for Poorly Gauged Basins: Application to the Karkheh River Basin, Iran


Abstract
1. Introduction
2. Materials and Methods
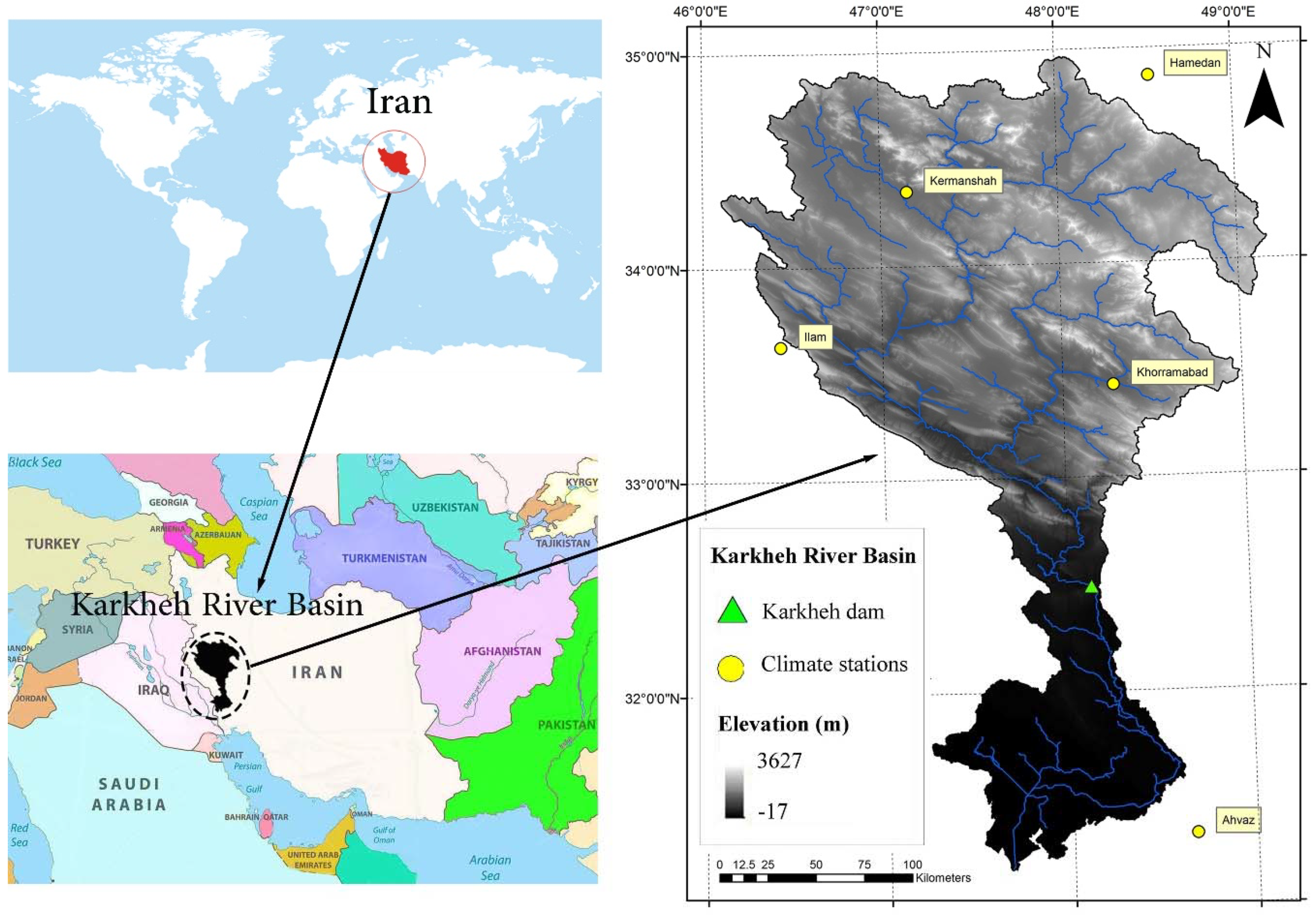
2.1. Study Area and Ground-Based Data Collection
2.2. Advanced Microwave Scanning Radiometer–Earth Observing System (AMSR–E) Soil Moisture Product Data
2.3. SM2RAIN Algorithm
2.4. Artificial Neural Network (ANN)
2.4.1. ANN-Basics and Classification
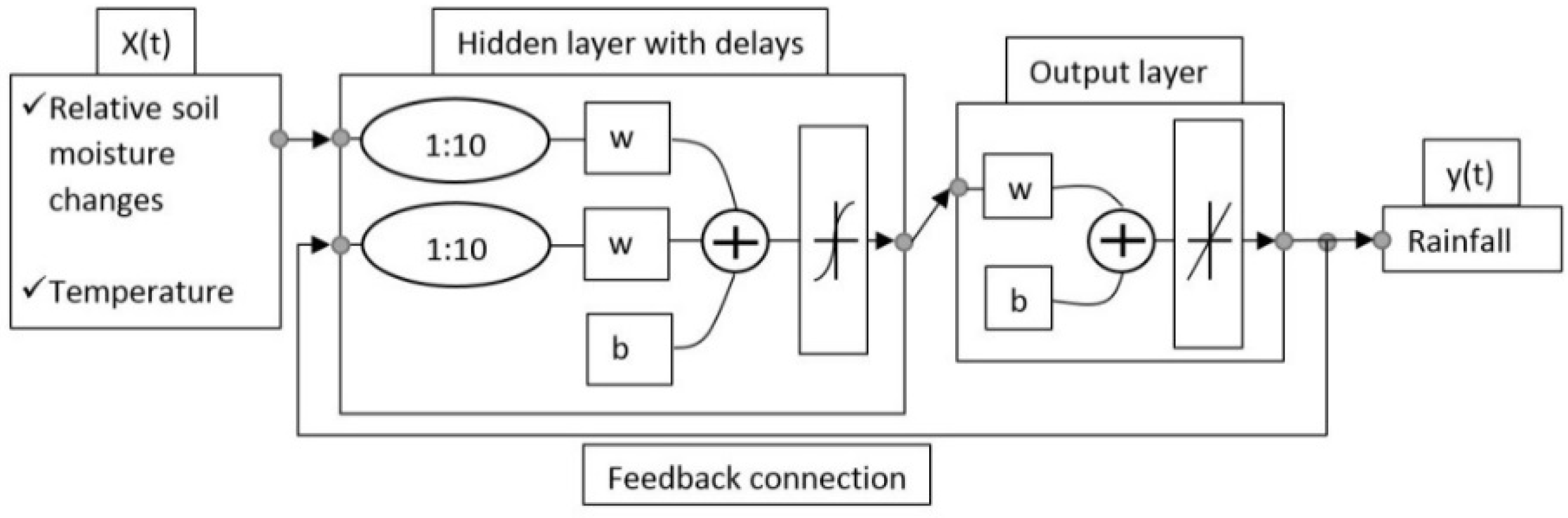
2.4.2. Nonlinear Autoregressive Neural Network with Exogenous Inputs (NARX)
2.5. Precipitation Estimates from Remotely Sensed Information Using Artificial Neural Networks Climate Data Record (PERSIANN–CDR)
3. Results and Discussion
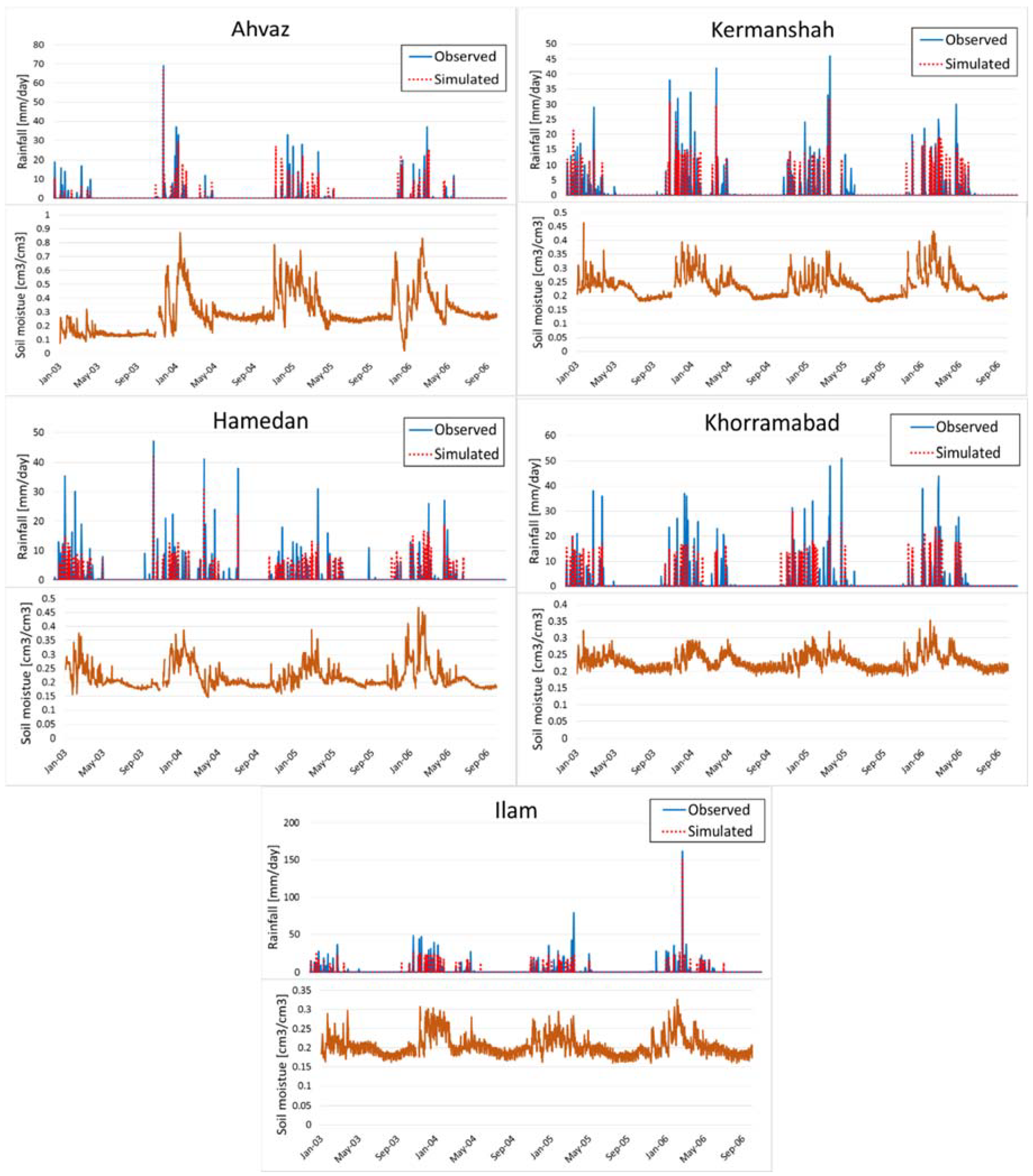
3.1. SM2RAIN Rainfall Estimation Using AMSR–E Soil Moisture Data
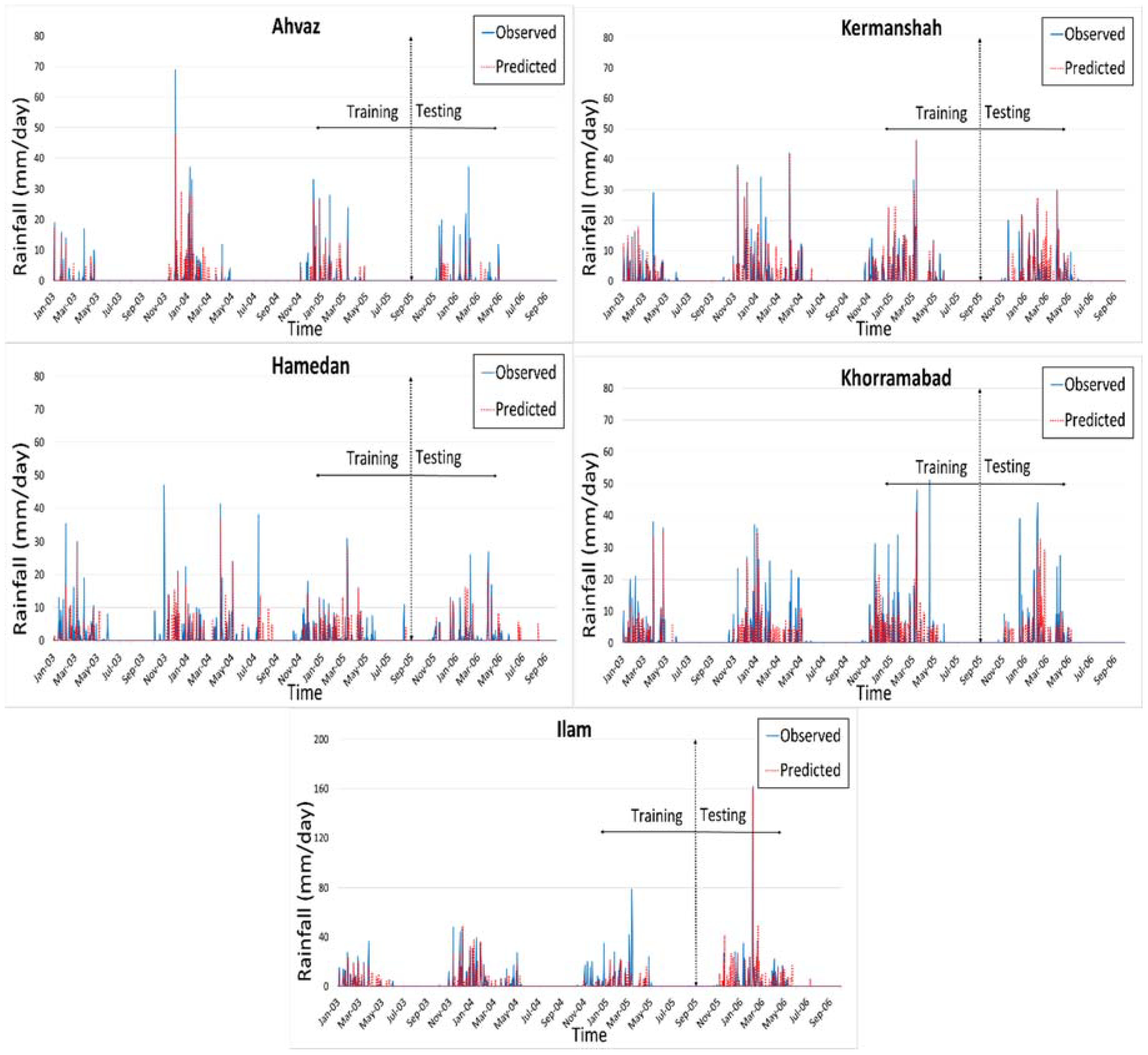
3.2. Rainfall Estimation Using the Nonlinear Autoregressive Network with Exogenous Inputs (NARX) Neural Network
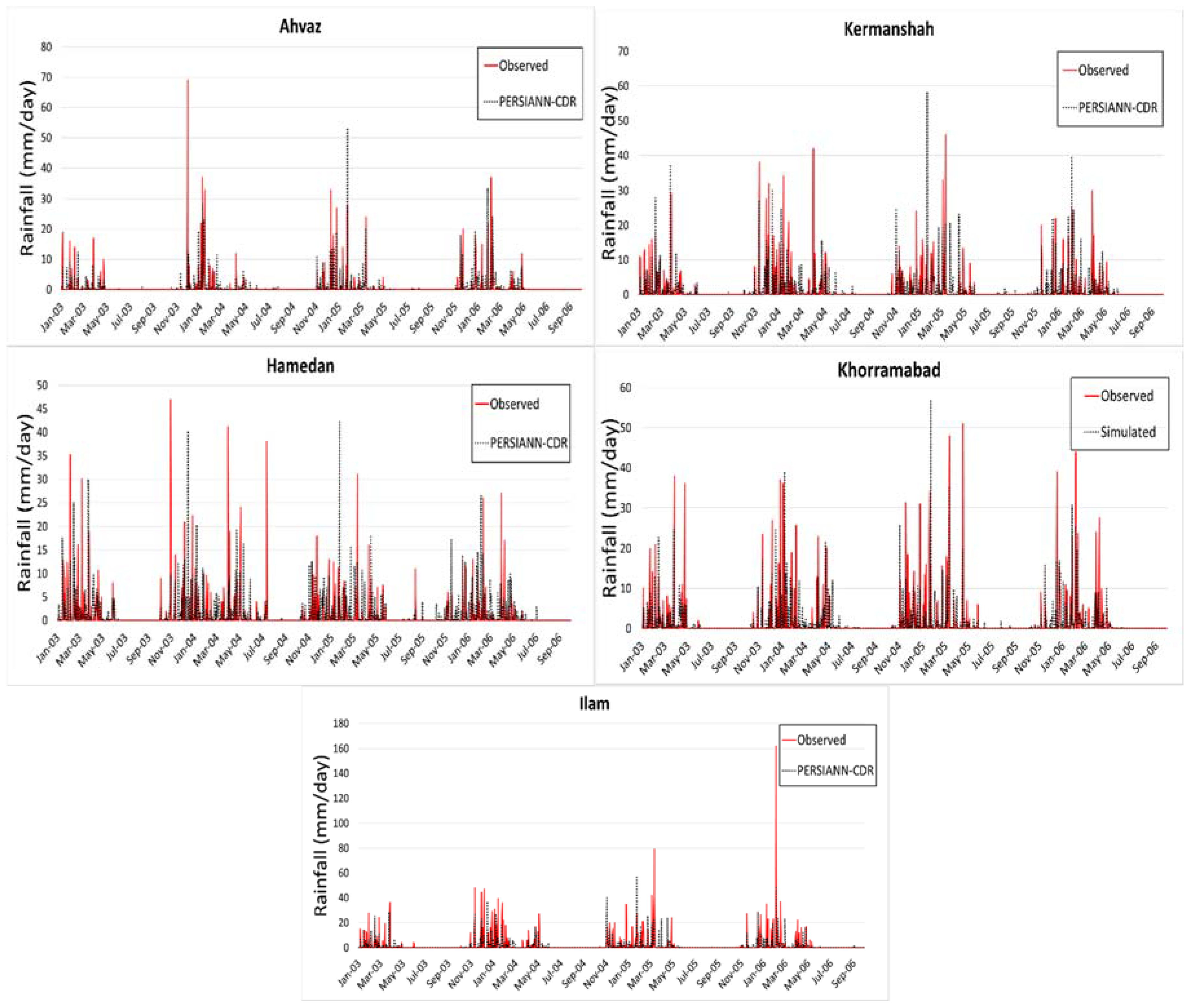
3.3. PERSIANN–CDR Satellite-Based Rainfall
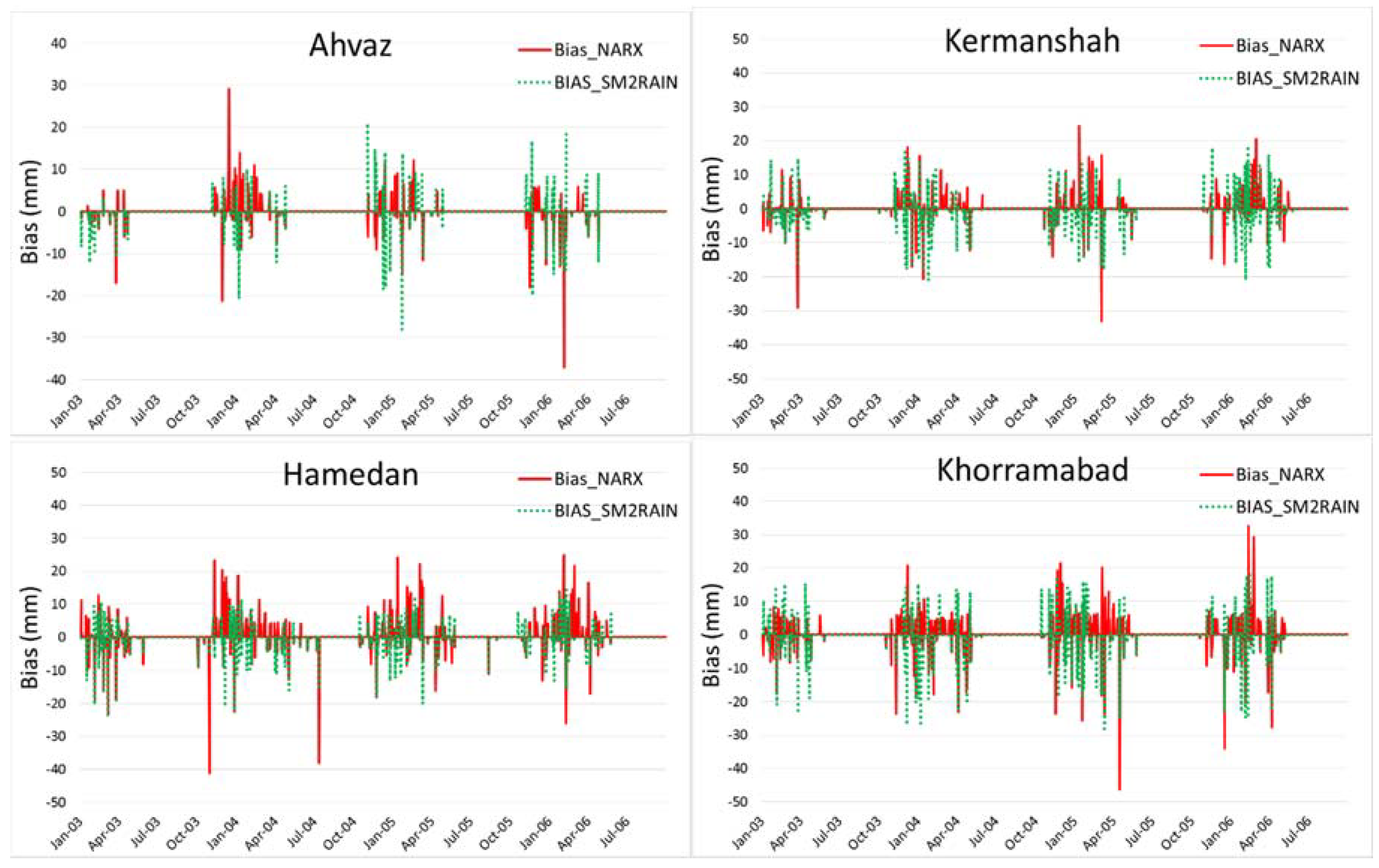
3.4. Comparison of SM2RAIN- and NARX-Simulated Rainfall
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Asante, K.O.; Macuacua, R.D.; Artan, G.A.; Lietzow, R.W.; Verdin, J.P. Developing a Flood Monitoring System From Remotely Sensed Data for the Limpopo Basin. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1709–1714. [Google Scholar] [CrossRef]
- Vrochidou, A.-E.K.; Tsanis, I.K.; Grillakis, M.G.; Koutroulis, A.G. The impact of climate change on hydrometeorological droughts at a basin scale. J. Hydrol. 2013, 476, 290–301. [Google Scholar] [CrossRef]
- Apurv, T.; Mehrotra, R.; Sharma, A.; Goyal, M.K.; Dutta, S. Impact of climate change on floods in the Brahmaputra basin using CMIP5 decadal predictions. J. Hydrol. 2015, 527, 281–291. [Google Scholar] [CrossRef]
- Rossi, M.; Kirschbaum, D.; Valigi, D.; Mondini, A.; Guzzetti, F. Comparison of Satellite Rainfall Estimates and Rain Gauge Measurements in Italy, and Impact on Landslide Modeling. Climate 2017, 5, 90. [Google Scholar] [CrossRef]
- Kidd, C.; Bauer, P.; Turk, J.; Huffman, G.J.; Joyce, R.; Hsu, K.-L.; Braithwaite, D. Intercomparison of High-Resolution Precipitation Products over Northwest Europe. J. Hydrometeorol. 2012, 13, 67–83. [Google Scholar] [CrossRef]
- Rudolf, B.; Schneider, U. Calculation of gridded precipitation data for the global land-surface using in-situ gauge observations. In Proceedings of the Second Workshop of the International Precipitation Working Group, Moterey, CA, USA, 25–28 October 2004; pp. 231–247. [Google Scholar]
- Yilmaz, K.K.; Hogue, T.S.; Hsu, K.-L.; Sorooshian, S.; Gupta, H.V.; Wagener, T. Intercomparison of Rain Gauge, Radar, and Satellite-Based Precipitation Estimates with Emphasis on Hydrologic Forecasting. J. Hydrometeorol. 2005, 6, 497–517. [Google Scholar] [CrossRef]
- Tian, Y.; Peters-Lidard, C.D. A global map of uncertainties in satellite-based precipitation measurements. Geophys. Res. Lett. 2010, 37, L24407. [Google Scholar] [CrossRef]
- Woldemeskel, F.M.; Sivakumar, B.; Sharma, A. Merging gauge and satellite rainfall with specification of associated uncertainty across Australia. J. Hydrol. 2013, 499, 167–176. [Google Scholar] [CrossRef]
- Kurtzman, D.; Navon, S.; Morin, E. Improving interpolation of daily precipitation for hydrologic modelling: Spatial patterns of preferred interpolators. Hydrol. Process. 2009, 23, 3281–3291. [Google Scholar] [CrossRef]
- Verworn, A.; Haberlandt, U. Spatial interpolation of hourly rainfall—Effect of additional information, variogram inference and storm properties. Hydrol. Earth Syst. Sci. 2011, 15, 569–584. [Google Scholar] [CrossRef]
- Rogelis, M.C.; Werner, M.G.F. Spatial Interpolation for Real-Time Rainfall Field Estimation in Areas with Complex Topography. J. Hydrometeorol. 2013, 14, 85–104. [Google Scholar] [CrossRef]
- Stisen, S.; Tumbo, M. Interpolation of daily raingauge data for hydrological modelling in data sparse regions using pattern information from satellite data. Hydrol. Sci. J. 2015, 60, 1911–1926. [Google Scholar] [CrossRef]
- Chen, T.; Ren, L.; Yuan, F.; Yang, X.; Jiang, S.; Tang, T.; Liu, Y.; Zhao, C.; Zhang, L. Comparison of Spatial Interpolation Schemes for Rainfall Data and Application in Hydrological Modeling. Water 2017, 9, 342. [Google Scholar] [CrossRef]
- Zambrano-Bigiarini, M.; Nauditt, A.; Birkel, C.; Verbist, K.; Ribbe, L. Temporal and spatial evaluation of satellite-based rainfall estimates across the complex topographical and climatic gradients of Chile. Hydrol. Earth Syst. Sci. 2017, 21, 1295–1320. [Google Scholar] [CrossRef]
- Bowman, K.P. Comparison of TRMM Precipitation Retrievals with Rain Gauge Data from Ocean Buoys. J. Clim. 2005, 18, 178–190. [Google Scholar] [CrossRef]
- Lo Conti, F.; Hsu, K.-L.; Noto, L.V.; Sorooshian, S. Evaluation and comparison of satellite precipitation estimates with reference to a local area in the Mediterranean Sea. Atmos. Res. 2014, 138, 189–204. [Google Scholar] [CrossRef]
- Stampoulis, D.; Anagnostou, E.N.; Nikolopoulos, E.I. Assessment of High-Resolution Satellite-Based Rainfall Estimates over the Mediterranean during Heavy Precipitation Events. J. Hydrometeorol. 2013, 14, 1500–1514. [Google Scholar] [CrossRef]
- Bayissa, Y.; Tadesse, T.; Demisse, G.; Shiferaw, A. Evaluation of Satellite-Based Rainfall Estimates and Application to Monitor Meteorological Drought for the Upper Blue Nile Basin, Ethiopia. Remote Sens. 2017, 9, 669. [Google Scholar] [CrossRef]
- Hughes, D.A. Comparison of satellite rainfall data with observations from gauging station networks. J. Hydrol. 2006, 327, 399–410. [Google Scholar] [CrossRef]
- Hsu, K.L.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation Estimation from Remotely Sensed Information Using Artificial Neural Networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Sorooshian, S.; Hsu, K.-L.; Gao, X.; Gupta, H.V.; Imam, B.; Braithwaite, D. Evaluation of PERSIANN System Satellite–Based Estimates of Tropical Rainfall. Bull. Am. Meteorol. Soc. 2000, 81, 2035–2046. [Google Scholar] [CrossRef]
- Kidd, C.; Kniveton, D.R.; Todd, M.C.; Bellerby, T.J. Satellite Rainfall Estimation Using Combined Passive Microwave and Infrared Algorithms. J. Hydrometeorol. 2003, 4, 1088–1104. [Google Scholar] [CrossRef]
- Su, J.; Lü, H.; Wang, J.; Sadeghi, A.; Zhu, Y. Evaluating the Applicability of Four Latest Satellite–Gauge Combined Precipitation Estimates for Extreme Precipitation and Streamflow Predictions over the Upper Yellow River Basins in China. Remote Sens. 2017, 9, 1176. [Google Scholar] [CrossRef]
- Brocca, L.; Moramarco, T.; Melone, F.; Wagner, W. A new method for rainfall estimation through soil moisture observations. Geophys. Res. Lett. 2013, 40, 853–858. [Google Scholar] [CrossRef]
- Brocca, L.; Ciabatta, L.; Massari, C.; Moramarco, T.; Hahn, S.; Hasenauer, S.; Kidd, R.; Dorigo, W.; Wagner, W.; Levizzani, V. Soil as a natural rain gauge: Estimating global rainfall from satellite soil moisture data. J. Geophys. Res. Atmos. 2014, 119, 5128–5141. [Google Scholar] [CrossRef]
- Brocca, L.; Camici, S.; Melone, F.; Moramarco, T.; Martínez-Fernández, J.; Didon-Lescot, J.-F.; Morbidelli, R. Improving the representation of soil moisture by using a semi-analytical infiltration model. Hydrol. Process. 2014, 28, 2103–2115. [Google Scholar] [CrossRef]
- Ciabatta, L.; Brocca, L.; Moramarco, T.; Wagner, W. Comparison of Different Satellite Rainfall Products over the Italian Territory. In Engineering Geology for Society and Territory; Lollino, G., Arattano, M., Rinaldi, M., Giustolisi, O., Marechal, J.-C., Grant, G.E., Eds.; Springer International Publishing: Cham, Switzerland; Heidelberg, Germany, 2015; pp. 623–626. [Google Scholar]
- Fereidoon, M.; Koch, M. SWAT-MODSIM-PSO optimization of multi-crop planning in the Karkheh River Basin, Iran, under the impacts of climate change. Sci. Total Environ. 2018, 630, 502–516. [Google Scholar] [CrossRef] [PubMed]
- Ciabatta, L.; Brocca, L.; Massari, C.; Moramarco, T.; Gabellani, S.; Puca, S.; Wagner, W. Rainfall-runoff modelling by using SM2RAIN-derived and state-of-the-art satellite rainfall products over Italy. Int. J. Appl. Earth Obs. Geoinf. 2016, 48, 163–173. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Moramarco, T.; Tramblay, Y.; Didon Lescot, J.-F. Potential of soil moisture observations in flood modelling: Estimating initial conditions and correcting rainfall. Adv. Water Resour. 2014, 74, 44–53. [Google Scholar] [CrossRef]
- Wu, C.L.; Chau, K.W.; Fan, C. Prediction of rainfall time series using modular artificial neural networks coupled with data-preprocessing techniques. J. Hydrol. 2010, 389, 146–167. [Google Scholar] [CrossRef]
- Philip, N.S.; Joseph, K.B. A neural network tool for analyzing trends in rainfall. Comput. Geosci. 2003, 29, 215–223. [Google Scholar] [CrossRef]
- Chattopadhyay, S.; Chattopadhyay, G. Comparative study among different neural net learning algorithms applied to rainfall time series. Meteorol. Appl. 2008, 15, 273–280. [Google Scholar] [CrossRef]
- Shukla, R.P.; Tripathi, K.C.; Pandey, A.C.; Das, I.M.L. Prediction of Indian summer monsoon rainfall using Niño indices: A neural network approach. Atmos. Res. 2011, 102, 99–109. [Google Scholar] [CrossRef]
- Nastos, P.T.; Moustris, K.P.; Larissi, I.K.; Paliatsos, A.G. Rain intensity forecast using Artificial Neural Networks in Athens, Greece. Atmos. Res. 2013, 119, 153–160. [Google Scholar] [CrossRef]
- Abbot, J.; Marohasy, J. Input selection and optimisation for monthly rainfall forecasting in Queensland, Australia, using artificial neural networks. Atmos. Res. 2014, 138, 166–178. [Google Scholar] [CrossRef]
- Leontaritis, I.J.; Billings, S.A. Input-output parametric models for non-linear systems Part I: Deterministic non-linear systems. Int. J. Control 1985, 41, 303–328. [Google Scholar] [CrossRef]
- Lin, T.; Horne, B.G.; Tino, P.; Giles, C.L. Learning long-term dependencies in NARX recurrent neural networks. IEEE Trans. Neural Netw. 1996, 7, 1329–1338. [Google Scholar] [PubMed]
- Boussaada, Z.; Curea, O.; Remaci, A.; Camblong, H.; Mrabet Bellaaj, N. A Nonlinear Autoregressive Exogenous (NARX) Neural Network Model for the Prediction of the Daily Direct Solar Radiation. Energies 2018, 11, 620. [Google Scholar] [CrossRef]
- Wunsch, A.; Liesch, T.; Broda, S. Forecasting groundwater levels using nonlinear autoregressive networks with exogenous input (NARX). J. Hydrol. 2018. [Google Scholar] [CrossRef]
- Fereidoon, M.; Koch, M.; Brocca, L. Predicting rainfall and runoff through satellite soil moisture data and SWAT modelling for a poorly gauged basin in Iran. J. Hydrol. 2018. (under review). [Google Scholar]
- Ahmad, M.-U.-D.; Giordano, M. The Karkheh River basin: The food basket of Iran under pressure. Water Int. 2010, 35, 522–544. [Google Scholar] [CrossRef]
- Tavakoli, A.R.; Oweis, T.; Ashrafi, S.; Asadi, H.; Siadat, H.; Liaghat, A. Improving Rainwater Productivity with Supplemental Irrigation in Upper Karkheh River Basin of Iran; International Center for Agricultural Research in the Dry Areas (ICARDA): Aleppo, Syria, 2010; 123p. [Google Scholar]
- Njoku, E.G.; Jackson, T.J.; Lakshmi, V.; Chan, T.K.; Nghiem, S.V. Soil moisture retrieval from AMSR-E. IEEE Trans. Geosci. Remote Sens. 2003, 41, 215–229. [Google Scholar] [CrossRef]
- Jackson, T.J.; Cosh, M.H.; Bindlish, R.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Goodrich, D.C.; Moran, M.S.; Du, J. Validation of Advanced Microwave Scanning Radiometer Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4256–4272. [Google Scholar] [CrossRef]
- Brocca, L.; Massari, C.; Ciabatta, L.; Moramarco, T.; Penna, D.; Zuecco, G.; Pianezzola, L.; Borga, M.; Matgen, P.; Martínez-Fernández, J. Rainfall estimation from in situ soil moisture observations at several sites in Europe: An evaluation of the SM2RAIN algorithm. J. Hydrol. Hydromech. 2015, 63, 201–209. [Google Scholar] [CrossRef]
- Famiglietti, J.S.; Wood, E.F. Multiscale modeling of spatially variable water and energy balance processes. Water Resour. Res. 1994, 30, 3061–3078. [Google Scholar] [CrossRef]
- Doorenbos, J.; Pruitt, W.O. Background and Development of Methods to Predict Reference Crop Evapotranspiration (ETo); Appendix II in FAO-ID-24; FAO: Rome, Italy, 1977; pp. 108–119. [Google Scholar]
- Zare, M.; Koch, M. Using ANN and ANFIS Models for simulating and predicting Groundwater Level Fluctuations in the Miandarband Plain, Iran. In Proceedings of the 4th IAHR Europe Congress. Sustainable Hydraulics in the Era of Global Change, Liege, Belgium, 27–29 July 2016; p. 416. [Google Scholar]
- Ince, H. Non-Parametric Regression Methods. Comput. Manag. Sci. 2006, 3, 161–174. [Google Scholar] [CrossRef]
- Bishop, C.M. Neural Networks for Pattern Recognition; Clarendon Press: Oxford, UK, 1995. [Google Scholar]
- Terzic, E.; Nagarajah, C.R.; Alamgir, M. Capacitive sensor-based fluid level measurement in a dynamic environment using neural network. Eng. Appl. Artif. Intell. 2010, 23, 614–619. [Google Scholar] [CrossRef]
- Hung, N.Q.; Babel, M.S.; Weesakul, S.; Tripathi, N.K. An artificial neural network model for rainfall forecasting in Bangkok, Thailand. Hydrol. Earth Syst. Sci. 2009, 13, 1413–1425. [Google Scholar] [CrossRef]
- Pearlmutter, B. Dynamic Recurrent Neural Networks; Technical Report CMU-CS-90-196; School of Computer Science, Carnegie Mellon University: Pittsburgh, PA, USA, 1990. [Google Scholar]
- Ćirović, V.; Aleksendrić, D.; Mladenović, D. Braking torque control using recurrent neural networks. Proc. Inst. Mech. Eng. Part D 2012, 226, 754–766. [Google Scholar] [CrossRef]
- Huo, F.; Poo, A.-N. Nonlinear autoregressive network with exogenous inputs based contour error reduction in CNC machines. Int. J. Mach. Tools Manuf. 2013, 67, 45–52. [Google Scholar] [CrossRef]
- Leverington, D. A Basic Introduction to Feedforward Backpropagation Neural Networks; Technical Report; Texas Tech University: Lubbock, TX, USA, 2009; Available online: http://www.webpages.ttu.edu/dleverin/neural_network/neural_networks.html (accessed on 2 July 2018).
- Beale, M.H.; Hagan, M.T.; Demuth, H.B. Neural Network Toolbox™ User’s Guide; R2012a; The MathWorks, Inc.: Natick, MA, USA, 2012. [Google Scholar]
- Tan, M.L.; Santo, H. Comparison of GPM IMERG, TMPA 3B42 and PERSIANN-CDR satellite precipitation products over Malaysia. Atmos. Res. 2018, 202, 63–76. [Google Scholar] [CrossRef]
- PERSIANN-CDR Data Downloads. Available online: https://www.ncdc.noaa.gov/cdr/atmospheric/precipitation-persiann-cdr (accessed on 3 July 2018).
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; de Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling sparse ground-based soil moisture observations for the validation of coarse-resolution satellite soil moisture products. Rev. Geophys. 2012, 50, 3675. [Google Scholar] [CrossRef]
- Chen, F.; Crow, W.T.; Ryu, D. Dual Forcing and State Correction via Soil Moisture Assimilation for Improved Rainfall–Runoff Modeling. J. Hydrometeorol. 2014, 15, 1832–1848. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, G.; Lei, X.; Hong, Y.; Yang, N. Can satellite precipitation products estimate probable maximum precipitation: A comparative investigation with gauge data in the Dadu River Basin. Remote Sens. 2018, 10, 41. [Google Scholar] [CrossRef]
- Li, Z.; Yang, D.; Hong, Y. Multi-scale evaluation of high-resolution multi-sensor blended global precipitation products over the Yangtze River. J. Hydrol. 2013, 500, 157–169. [Google Scholar] [CrossRef]
- Guo, H.; Chen, S.; Bao, A.; Hu, J.; Gebregiorgis, A.S.; Xue, X.; Zhang, X. Inter-comparison of high-resolution satellite precipitation products over central Asia. Remote Sens. 2015, 7, 7181–7211. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Climate Station | Longitude (°East) | Latitude (°North) | Elevation (m a.s.l.) |
|---|---|---|---|
| Hamedan | 48.53 | 34.87 | 1741 |
| Kermanshah | 47.15 | 34.35 | 1319 |
| Ilam | 46.43 | 33.63 | 1337 |
| Khorramabad | 48.28 | 33.43 | 1148 |
| Ahvaz | 48.67 | 31.33 | 22 |
| Climate Station | R2 | RMSE (mm) | NSE | |||
|---|---|---|---|---|---|---|
| Cal | Val | Cal | Val | Cal | Val | |
| Ahvaz | 0.57 | 0.44 | 2.5 | 2.5 | 0.63 | 0.36 |
| Kermanshah | 0.48 | 0.23 | 3.07 | 3.91 | 0.55 | 0.11 |
| Hamedan | 0.38 | 0.31 | 3.06 | 0.12 | 0.44 | 0.09 |
| Khorramabad | 0.35 | 0.33 | 4.19 | 4.32 | 0.38 | 0.26 |
| Ilam | 0.28 | 0.65 | 5.58 | 4.47 | 0.33 | 0.56 |
| Climate Station | Zn (mm) | a (mm/day) | b | c |
|---|---|---|---|---|
| Ahvaz | 32.1 | 39 | 2.2 | 1.90 |
| Kermanshah | 34.8 | 50 | 2.3 | 2.00 |
| Hamedan | 58.3 | 56 | 1.5 | 1.20 |
| Khorramabad | 39.2 | 46 | 1.9 | 1.95 |
| Ilam | 44.6 | 87 | 2.5 | 1.90 |
| Climate Station | Neurons | Delays |
|---|---|---|
| Ahvaz | 8 | 10 |
| Kermanshah | 10 | 8 |
| Hamedan | 9 | 10 |
| Khorramabad | 14 | 10 |
| Ilam | 10 | 12 |
| Climate Station | Training | Testing | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE (mm) | NSE | R2 | RMSE (mm) | NSE | |
| Ahvaz | 0.65 | 3.3 | 0.62 | 0.57 | 4.8 | 0.28 |
| Kermanshah | 0.60 | 4.8 | 0.55 | 0.37 | 6.6 | 0.53 |
| Hamedan | 0.40 | 5.8 | 0.16 | 0.26 | 6.8 | 0.10 |
| Khorramabad | 0.37 | 5.9 | 0.38 | 0.17 | 7.3 | 0.27 |
| Ilam | 0.32 | 6.3 | 0.79 | 0.23 | 8.9 | 0.31 |
| Climate Station | R2 | RMSE (mm) | NSE |
|---|---|---|---|
| Ahvaz | 0.30 | 3.24 | 0.18 |
| Kermanshah | 0.29 | 3.87 | 0.09 |
| Hamedan | 0.31 | 6.03 | 0.31 |
| Khorramabad | 0.27 | 4.41 | 0.21 |
| Ilam | 0.12 | 4.06 | −0.26 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fereidoon, M.; Koch, M. Rainfall Prediction with AMSR–E Soil Moisture Products Using SM2RAIN and Nonlinear Autoregressive Networks with Exogenous Input (NARX) for Poorly Gauged Basins: Application to the Karkheh River Basin, Iran. Water 2018, 10, 964. https://doi.org/10.3390/w10070964
Fereidoon M, Koch M. Rainfall Prediction with AMSR–E Soil Moisture Products Using SM2RAIN and Nonlinear Autoregressive Networks with Exogenous Input (NARX) for Poorly Gauged Basins: Application to the Karkheh River Basin, Iran. Water. 2018; 10(7):964. https://doi.org/10.3390/w10070964
Chicago/Turabian StyleFereidoon, Majid, and Manfred Koch. 2018. "Rainfall Prediction with AMSR–E Soil Moisture Products Using SM2RAIN and Nonlinear Autoregressive Networks with Exogenous Input (NARX) for Poorly Gauged Basins: Application to the Karkheh River Basin, Iran" Water 10, no. 7: 964. https://doi.org/10.3390/w10070964
APA StyleFereidoon, M., & Koch, M. (2018). Rainfall Prediction with AMSR–E Soil Moisture Products Using SM2RAIN and Nonlinear Autoregressive Networks with Exogenous Input (NARX) for Poorly Gauged Basins: Application to the Karkheh River Basin, Iran. Water, 10(7), 964. https://doi.org/10.3390/w10070964