1. Introduction
Much of the food and fibre needs of the world are met with irrigated agriculture. A large proportion of the farms devoted to this are supplied by networks of channels, which are seeing increasing levels of automation [
1]. Excessive vegetation in these typically earthen channels impacts timely and efficient delivery of water to farms because of its effect of reducing flow rates [
2]. Relationships between channel geometry, aquatic weed growth and Manning’s resistance coefficient
n for rivers were explored in [
3]. Monitoring and controlling weeds in irrigation channels is a costly exercise, and there is therefore demand to improve the effectiveness of monitoring and methods of assessing new control strategies.
Irrigation channel networks often cover significant areas, with many kilometers of channels. For example, the Murrumbidgee Irrigation network covers a total of 670,000 ha, and delivered water to 117,900 ha of irrigated land in 2017. It includes 3500 km of supply channels and 1600 km of drainage channels [
4]. The widths of these channels are typically less than 10 m, the depths less than 1.5 m, and the vast majority are earthen channels. These characteristics are similar to most irrigation areas in the world. Considering the vast distances involved, regular manual surveying channels for weeds is impractical.
Many works have considered alternatives of manual monitoring of aquatic vegetation, including echo sounding and remote sensing (optical and radar). Most of these studies focused on lakes and rivers rather than irrigation channels.
Echo sounding for vegetation detection in an estuary was investigated in [
5]. Sonar detection of vegetation works by sensing reflections, probably caused by the presence of gas in plants, which causes an acoustic impedance discontinuity with the surrounding water. Unvegetated bottom returns the strongest signal, while vegetation returns a weaker echo (but still stronger than ambient water noise). They classify each ping return into unclassified, noise, out of water, too deep, bare bottom and plant. They performed physical sampling (over a quadrat), and visual analysis using video (clear water) to compare against sonar estimates of vegetation coverage. They found reasonable relationships, but suggested optical techniques are better for shallow water or for vegetation appearing on the surface. A comparison of spatial environmental models, echo sounding and remote sensing to predict vegetation distribution and biomass in a lake [
6] found remote sensing was the least accurate in this environment due to water turbidity. This raises a difficulty in earthen irrigation channels, as the water is often turbid. Despite the advantages of echo sounding for vegetation mapping, it would be impractical to cover irrigation channel networks using this technique due to time and labour costs.
Stationary optical sensors may be useful to assess weed growth in fixed locations. Methods to eliminate reflections from the water surface using Red-Green-Blue (RGB) cameras were discussed in [
7]. They trialled a number of solutions including a camera mounted in a tube breaking the water surface with the tube bottom 10 cm below the surface, an underwater camera on a floating frame, and dedicated underwater cameras facing up and down. While fixed sensors are attractive to monitor weed growth in irrigation channels due to the high temporal resolution, weeds often grow in small patches so it is possible that they would not be detected at sensor locations. A large number of sensors would be required to cover a network.
A theoretical background for remote sensing in aquatic areas was reviewed in [
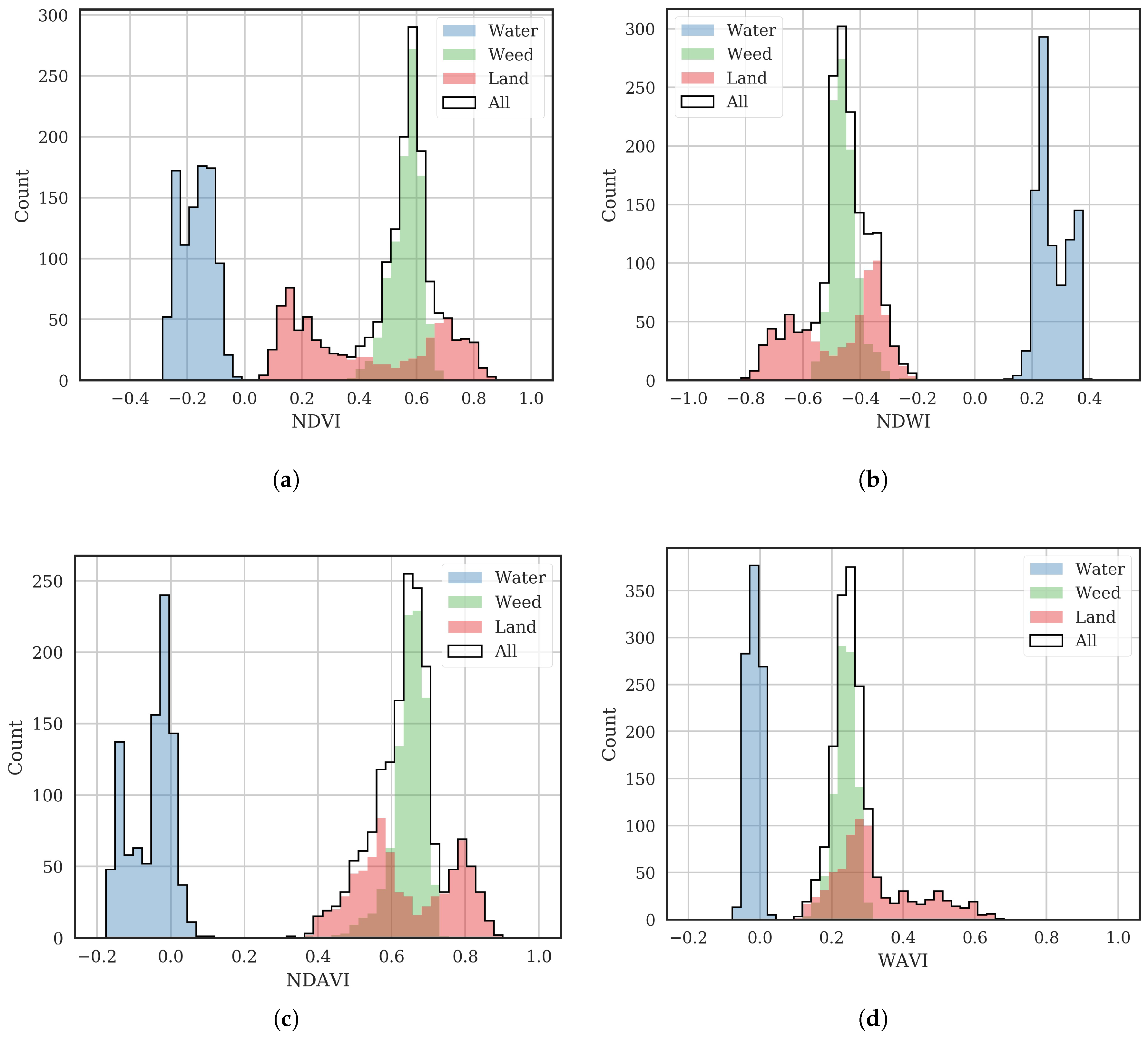
8]. They note that reflectance of electromagnetic signals differ depending on whether plants are submerged, floating or emergent, due to the significant and variable effect water has on different parts of the spectrum. Synthetic aperture radar uses the microwave part of the spectrum. Though it doesn’t penetrate water, it can be used to detect emergent vegetation, and the use of interferometry could be used to determine vegetation height. Use of Light Detecttion and Ranging (LiDAR) is challenging due to water absorption of the signal. The near infra-red portion of the spectrum is absorbed strongly by water, and thus optical reflectance is more useful for characterising submerged vegetation. They note the reasonable accuracy that has been achieved using even coarse resolution satellite imagery to predict vegetation cover and biomass. New vegetation indices were proposed and tested in [
9] that aim to enhance separability between land and aquatic vegetation. An algorithm to correct the absorption of light by a water column above submerged aquatic vegetation (SAV) was developed in [
10]. Optical images were able to determine the depth of SAV in clear water [
11].
A manually-piloted radio-controlled aircraft with an RGB camera was used to detect and spray weeds including alligator weed and salvinia in an aquatic habitat in [
12]. They used the Support Vector Machine (SVM) algorithm to classify images, with a weed expert providing the classification training set. An unmanned aerial vehicle (UAV) with red-green-blue (RGB) and near-infrared cameras was used to map the invasive water soldier weed in [
13], using object-based image analysis and the random forest algorithm. They selected training samples throughout the area based on visual interpretation with four classes (water soldier emergent and submerged, native vegetation and other) and achieved a classification kappa of 61%. The relationship between remotely sensed aquatic vegetation areas and biomass in a lake was investigated in [
14]. The best correlation was from the near infra-red band, with
. These works indicate the promise of applying images captured by UAV and satellite to irrigation channel weed detection.
It is useful to be able to not only identify areas of aquatic vegetation in irrigation channels, but also to distinguish between species. This would allow analysis of a change of population of certain species, as well as targeted control for the dominant species in sections of channels. Species discrimination using field work is time consuming and only practical in small areas. The authors of [
15] focus on discriminating wetland vegetation species and estimating their biophysical properties, using both multi- and hyper-spectral data. Challenges include the difficulty of identifying boundaries between aquatic vegetation (as they often overlap), and the reflectance characteristics of vegetation are often very similar and are combined with the reflectance characteristic of the surrounding water. In [
16], lake and river sites were surveyed with with 5-cm resolution. They used visual inspection of the images to classify a large variety of weed species, and compared this with the accuracy of object-based image analysis and classification. Accuracy was better than 90% for water versus vegetation, and better than 50% for taxonomy. The possibility of plant species discrimination in estuaries using hyperspectral data was investigated in [
17], considering variation in each species’ signature with space and time. Submerged plants can be discriminated only in visible wavelengths, as longer wavelengths (near infra-red) are absorbed by the water. The paper investigated three species, eelgrass
Zostera capricorni, strapweed
Posidonia australis, and paddleweed
Halophila ovalis over two years. The green wavelengths were most significant in discriminating between species, followed by red. They give suggested wavelengths and bandwidths to optimally classify these species.
This work aims to apply remote sensing techniques to enable efficient detection of weed in irrigation channels. The challenges particular to this application include the narrow width of the channels (compared with previous works which focussed on larger bodies of water such as lakes and rivers). Irrigation networks are also sparse and spread over extensive areas, rather than concentrated in a tight area. In addition, irrigation channel water is often highly turbid. The study takes multispectral imagery from UAVs and satellites, processes them in Google Earth Engine (GEE) [
18], using unsupervised and supervised classification algorithms to automatically map areas of weed infestation. This information is of great use to irrigation water delivery companies as they seek to optimise their networks to enable timely and high capacity delivery of water to farms.
4. Discussion
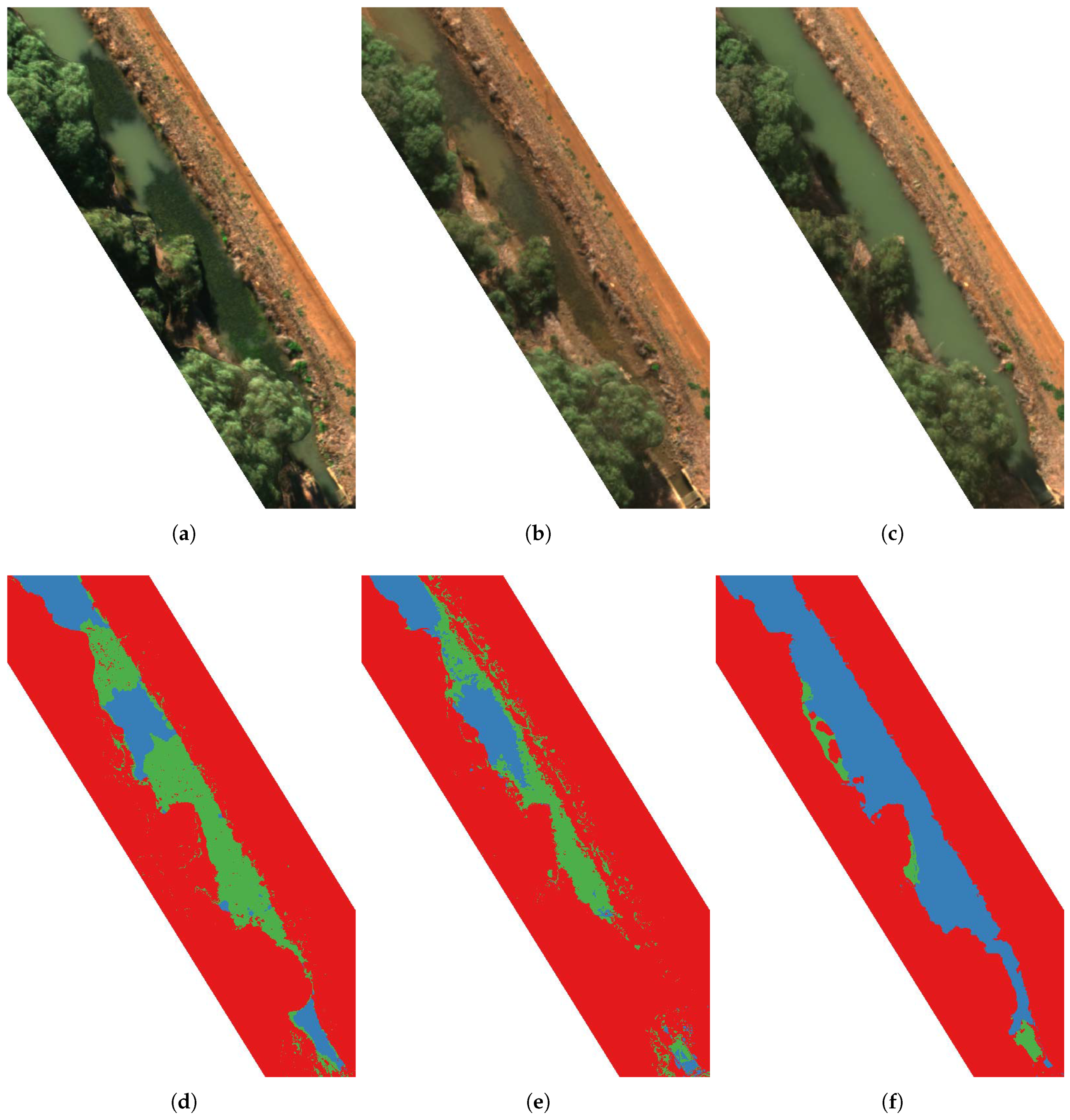
This study has demonstrated the potential for the use of remote sensing to monitor vegetation in irrigation channel networks, which is a major cause of impeded flow rates. GEE was used to process, analyse and classify UAV and satellite images in seconds.
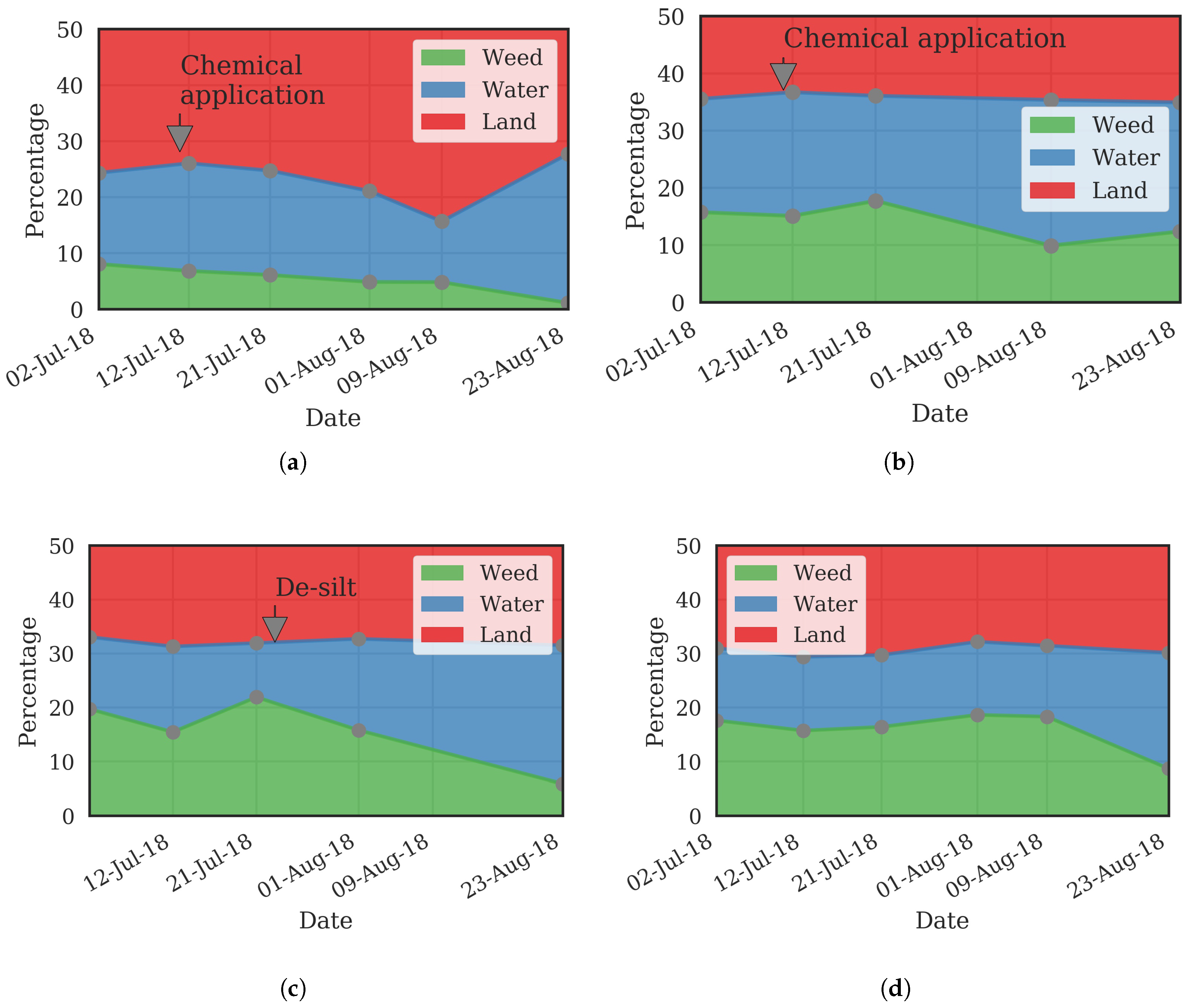
UAV and satellite imagery each have their benefits. Data from UAVs are useful for intensive monitoring of small areas of channels with high resolution. They offer a relatively low cost way of mapping stretches of channel, with the typical time taken to set up and capture a stretch of 1 km being about 1 h. Applications for this include intensive experiments to assess the effectiveness of weed control methods (chemical or mechanical), which require a time series of images to analyse change. Purchasing satellite images over small experimental areas and multiple dates would not be cost effective. Use of UAVs also provides very high resolution, which may be needed for deeper classification than was performed in this study, such as classifying between species of weeds. UAVs will also be useful to check for critical stretches of channel at short notice. An example where this is useful is when a farmer complains that the promised water delivery rates are not being met, a UAV could be used to survey the channels leading to the farm to determine if weed is the reason for the constraint, and the water delivery provider could then quickly make a decision on how to rectify the issue.
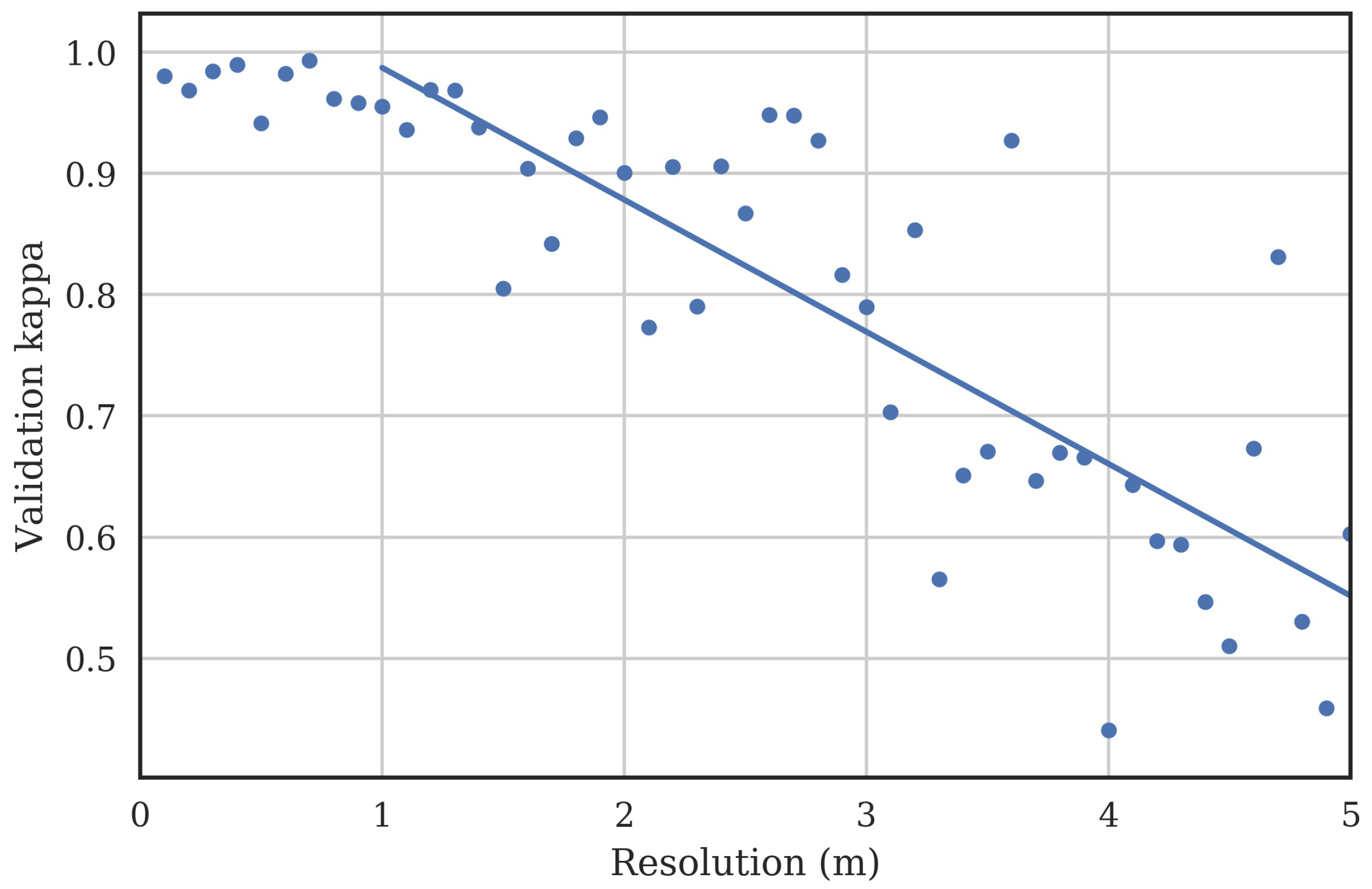
Satellite imagery will be important to monitor the large areas covered by the entire irrigation channel networks. It is clear that the resolution of current free satellite imagery is not sufficient. For example, the Sentinel constellation resolution is 10 m, which is not useful in monitoring channels with widths of much less than 10 m. Thus, images must be purchased, in order to obtain resolutions of 1 m or better. Images should contain at least the red, green, blue and near-infrared bands. Satellite images could be obtained for a few key times in the year. For example, one in the off-season could be used to plan weed control when it is possible to dry down channels and to target intensive work on problem areas. An image immediately preceding the peak irrigation season could be used to ensure the network is ready to deliver high flows to all areas and any last minute rectification of weed issues could be performed. An image in the midst of the peak irrigation season could be used to identify problem areas that are causing impeded flows. As a database of multi-season images are built up, trends in weed growth and problem areas could be identified and the reasons for proliferation of weeds in certain areas investigated and resilience against weed outbreaks improved. Multi-season images will also allow tracking of the proliferation of introduced species, which may be resistant to current weed control strategies.
The satellite images used in this study were very high resolution 8-band images, which comes with a high price. The minimum requirements for satellite images for weed area identification should be determined to reduce costs. Example satellite image costs are shown in
Table 11.
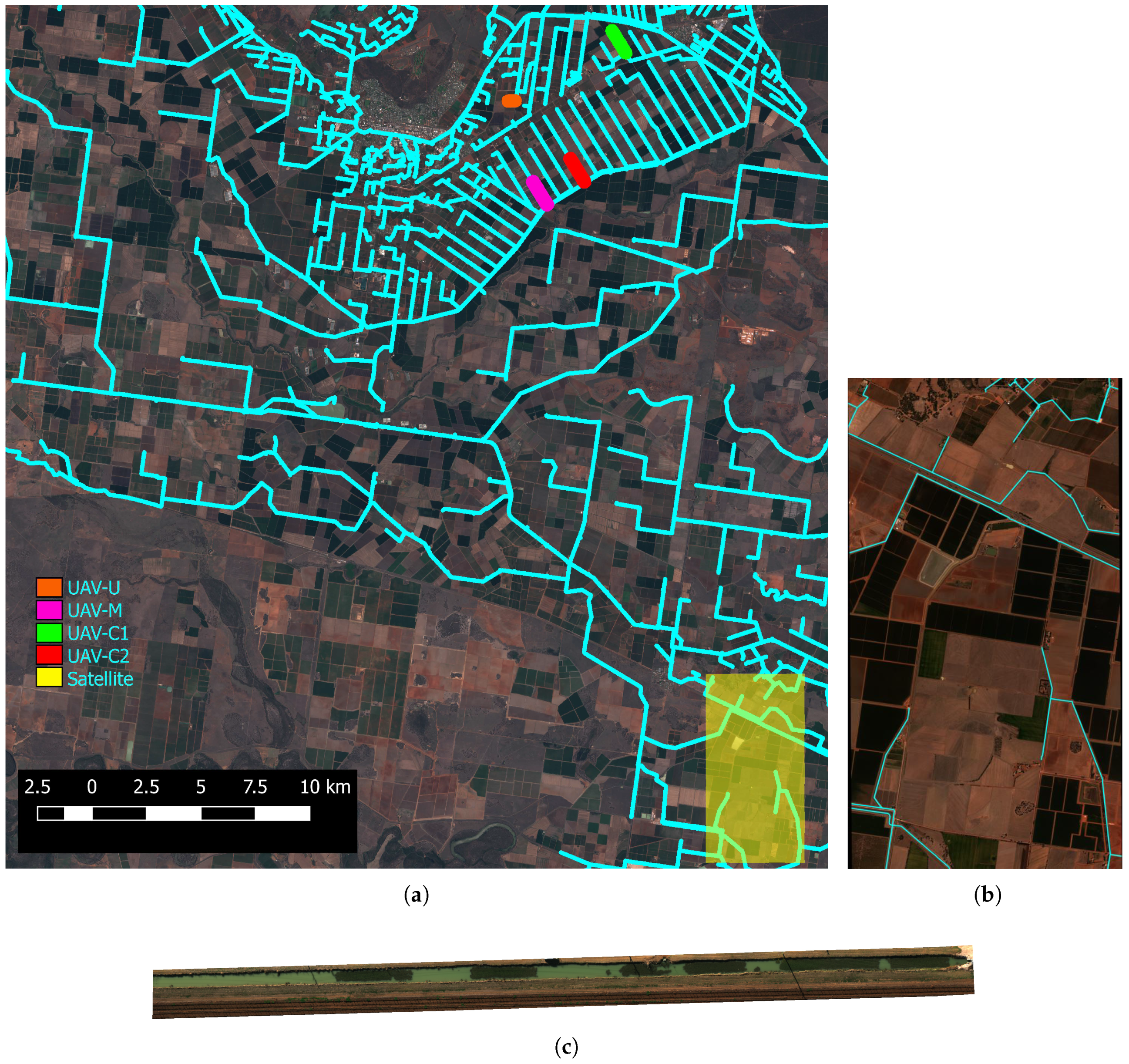
To compare the cost of surveying the network by satellite, to manually survey with a person in a car, the length of the supply networks for a number of rectangular areas within
Figure 1 was determined. The length of channels was found to be roughly proportional to the square root of the area:
. Thus, for a 500 km
area, the length of channel is about 550 km. If 1.5 m resolution satellite images are determined to be sufficient, the cost for an image will be around 500 × 6 =
$3000 (
Table 11). If a manual survey is done, assuming a 10 km/h driving speed, the cost is the hourly rate for a driver/surveyor multiplied by the time, plus the mileage costs for the car. Assuming an hourly rate (including tax, superannuation and insurance) of
$100/h, and mileage costs of
$1/km, the cost to manually survey the area would be 100 × 550/10 + 550 =
$6050, approximately twice that of the satellite image. This simple analysis shows that replacing manual monitoring with satellite monitoring is an attractive option. Satellite monitoring also provides additional benefits such as quantifiable weed area calculations and regular mapping of the region. Additional value could be generated from the purchased images by using them for other purposes, such as finding NDVI to determine the total area of irrigated land in a given season.
Future work will involve investigating the benefits that hyperspectral data may bring to the task of weed identification. Hyperspectral data has more bands and therefore may be able to separate the classes more precisely, particularly considering the different reflectance signatures of weed and land vegetation species [
15]. The World-View 3 data has eight bands, of which only four were used in this study. The possibility of classifying between species will be useful as different weeds are more responsive to different methods of control. Higher resolution imagery may also be needed so that object- and texture-based classification methods can be employed [
16].
Recent work has shown the strong impact of anisotropic reflectance of mixed vegetation and water environments [
27]. The electromagnetic reflectance environment of irrigation channels is complex, (with interactions between solar radiation, vegetation canopy, water surface, water column, and channel bottom), and the use of radiative transfer models of the system to obtain bidirectional reflectance functions may enhance classification accuracy [
28]. More work is needed in this area.
As a larger database of images of the channels are built over a longer time scale, with more variance in reflectance characteristics of each of the classes, it will be useful to investigate if a single classifier can be trained that is robust against all images. The classifier could be updated as new images become available. It would also be useful to investigate the possible merging of classifiers for UAV and satellite-based images, which may involve some radiometric correction as the instrument bands are different, as seen in
Table 1. Other future work could involve applying the techniques developed here to other regions, and assess how robust the method of weed detection is with different species of weeds that are predominant in those areas.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}