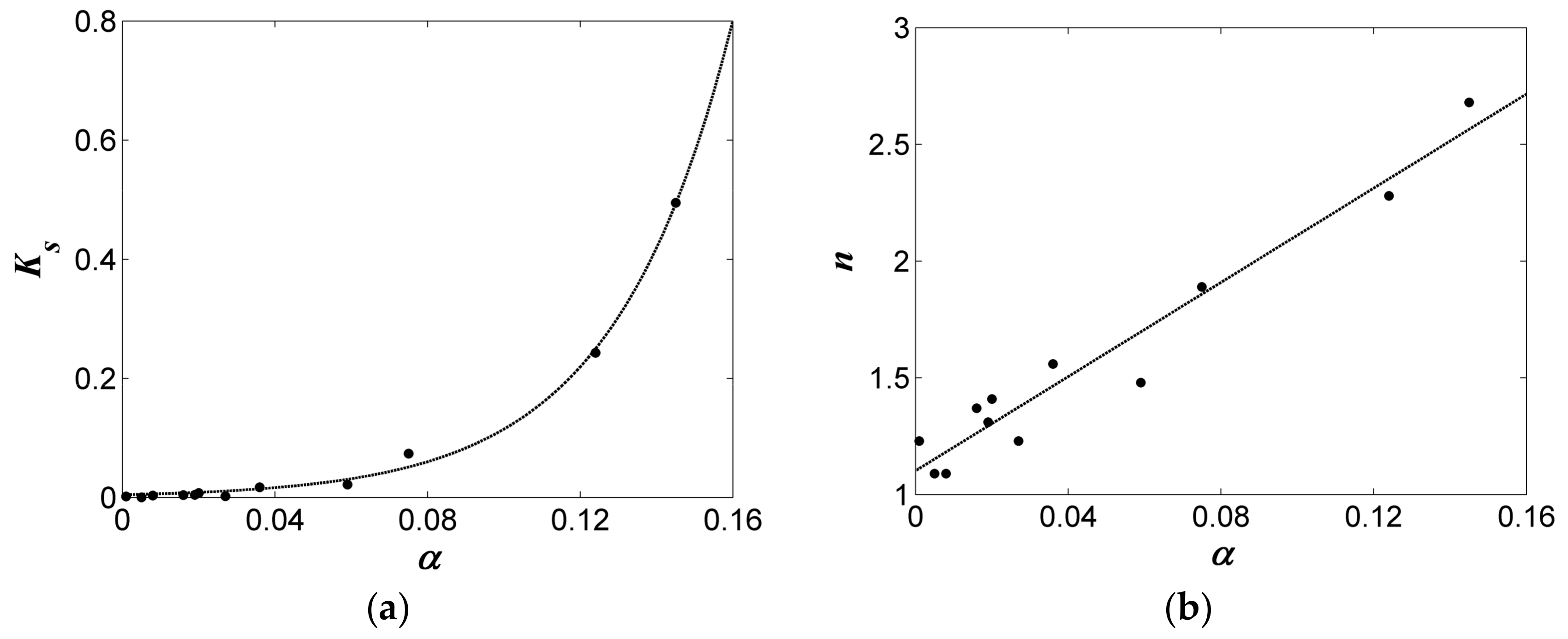
Figure 1.
Relationship between selected soil hydraulic parameters: (a) α–Ks; and (b) α–n.
Figure 1.
Relationship between selected soil hydraulic parameters: (a) α–Ks; and (b) α–n.
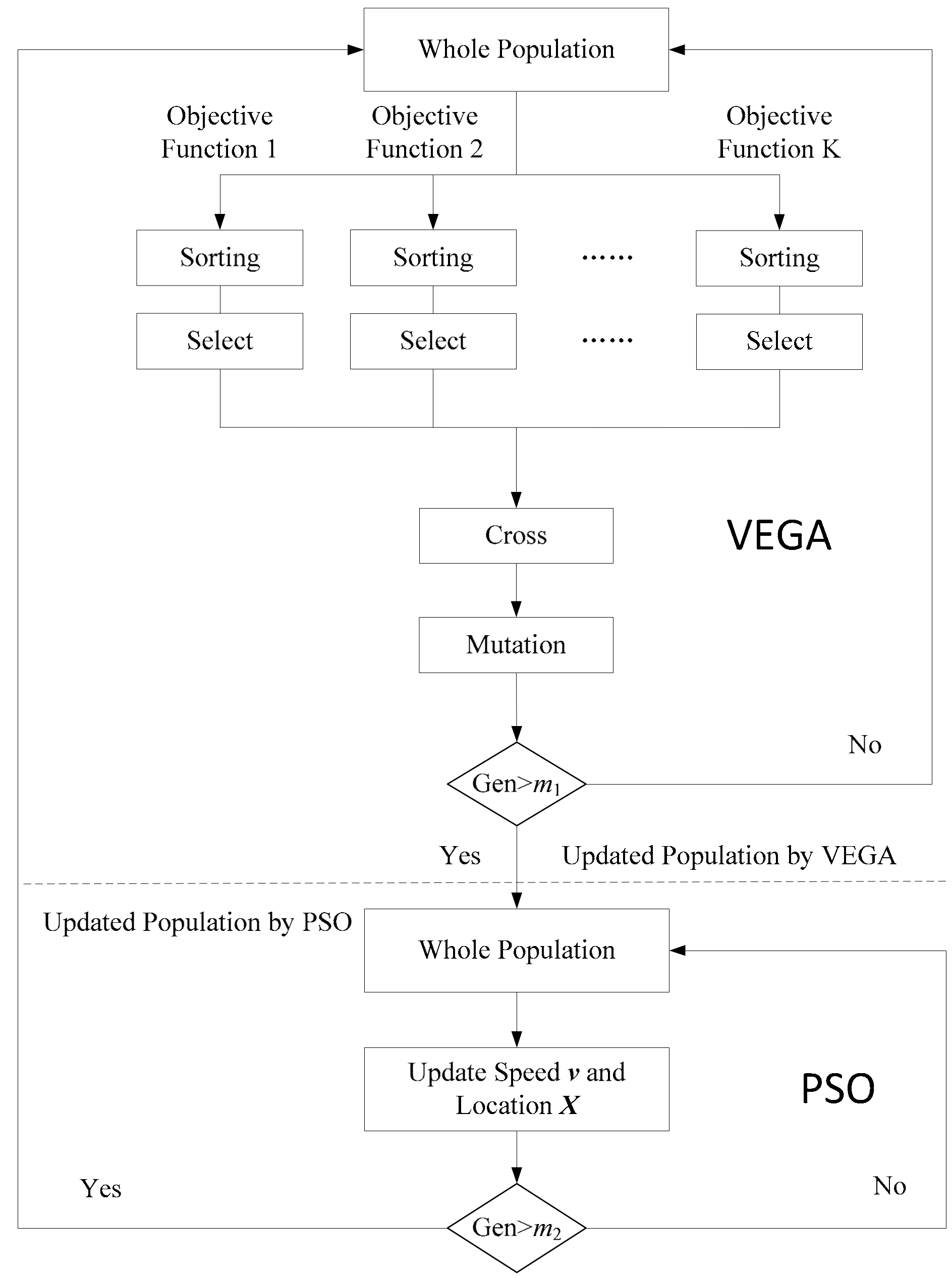
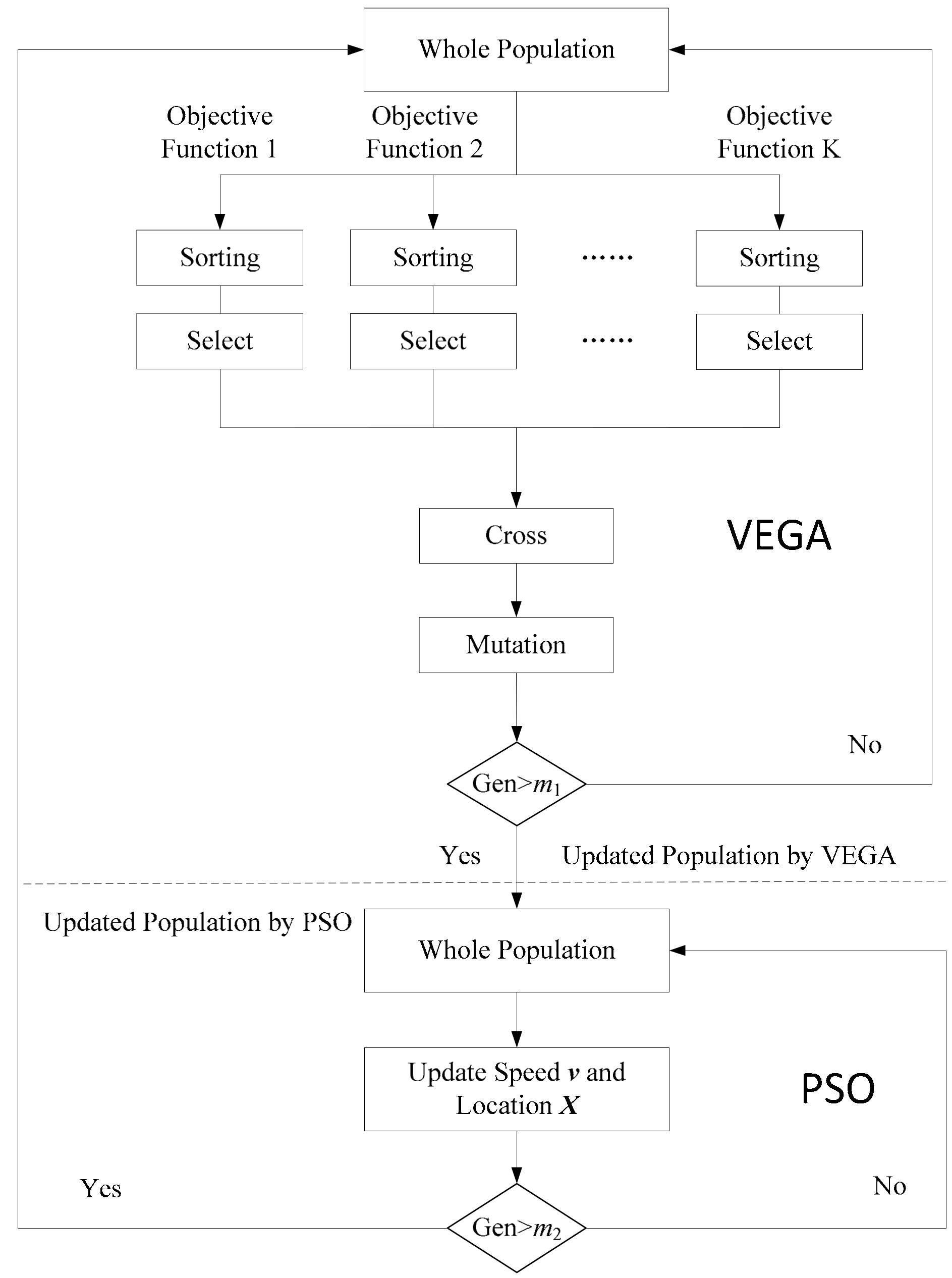
Figure 2.
Flowchart of an entire optimizing cycle of the hybrid VEGA–PSO algorithm.
Figure 2.
Flowchart of an entire optimizing cycle of the hybrid VEGA–PSO algorithm.
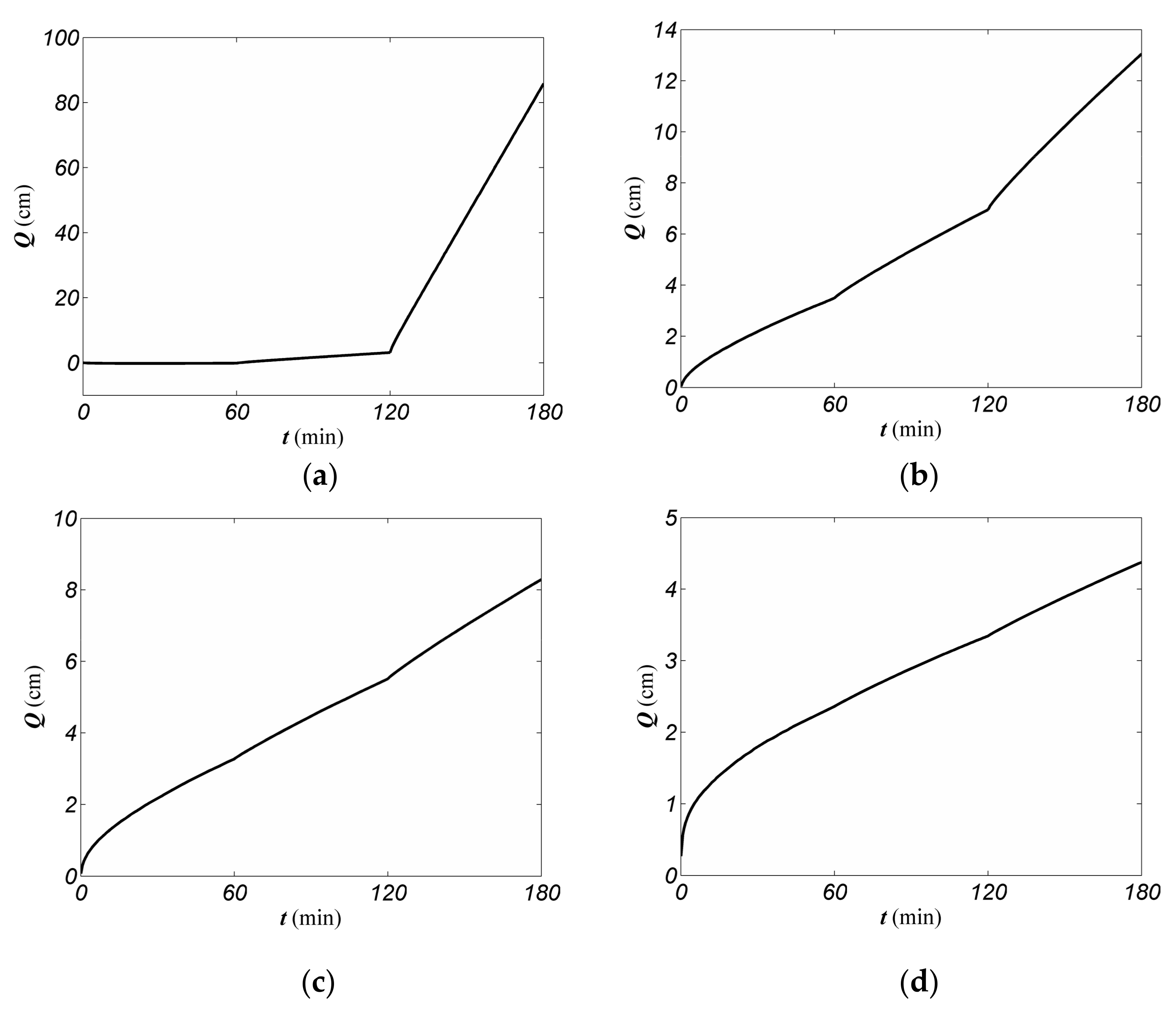
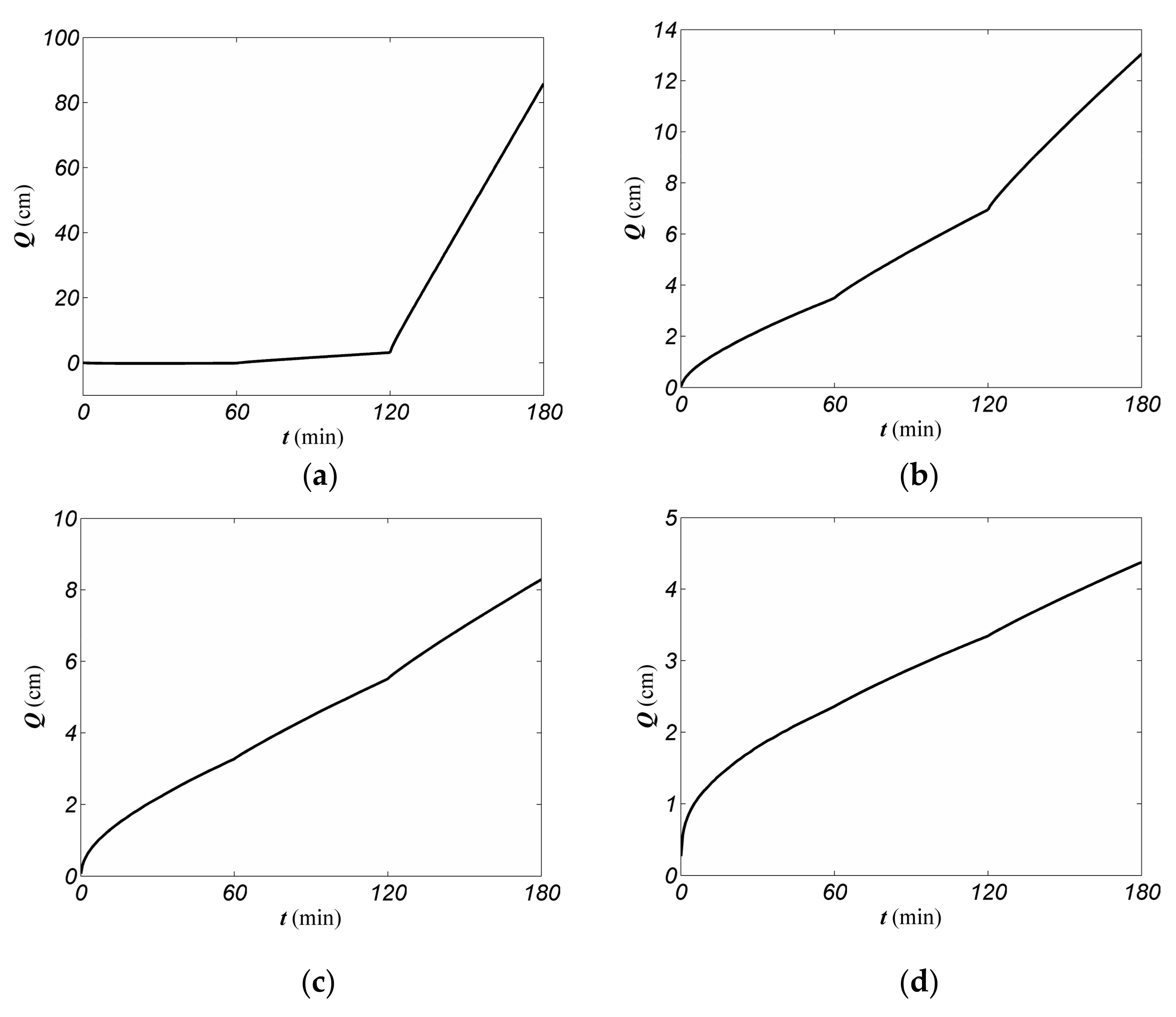
Figure 3.
Cumulative infiltration versus time for four types of soil with three consecutive supply matric potentials (h0 (t = 0) = −15 cm; h0 (t = 60) = −10 cm; and h0 (t = 120) = −3 cm): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Figure 3.
Cumulative infiltration versus time for four types of soil with three consecutive supply matric potentials (h0 (t = 0) = −15 cm; h0 (t = 60) = −10 cm; and h0 (t = 120) = −3 cm): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
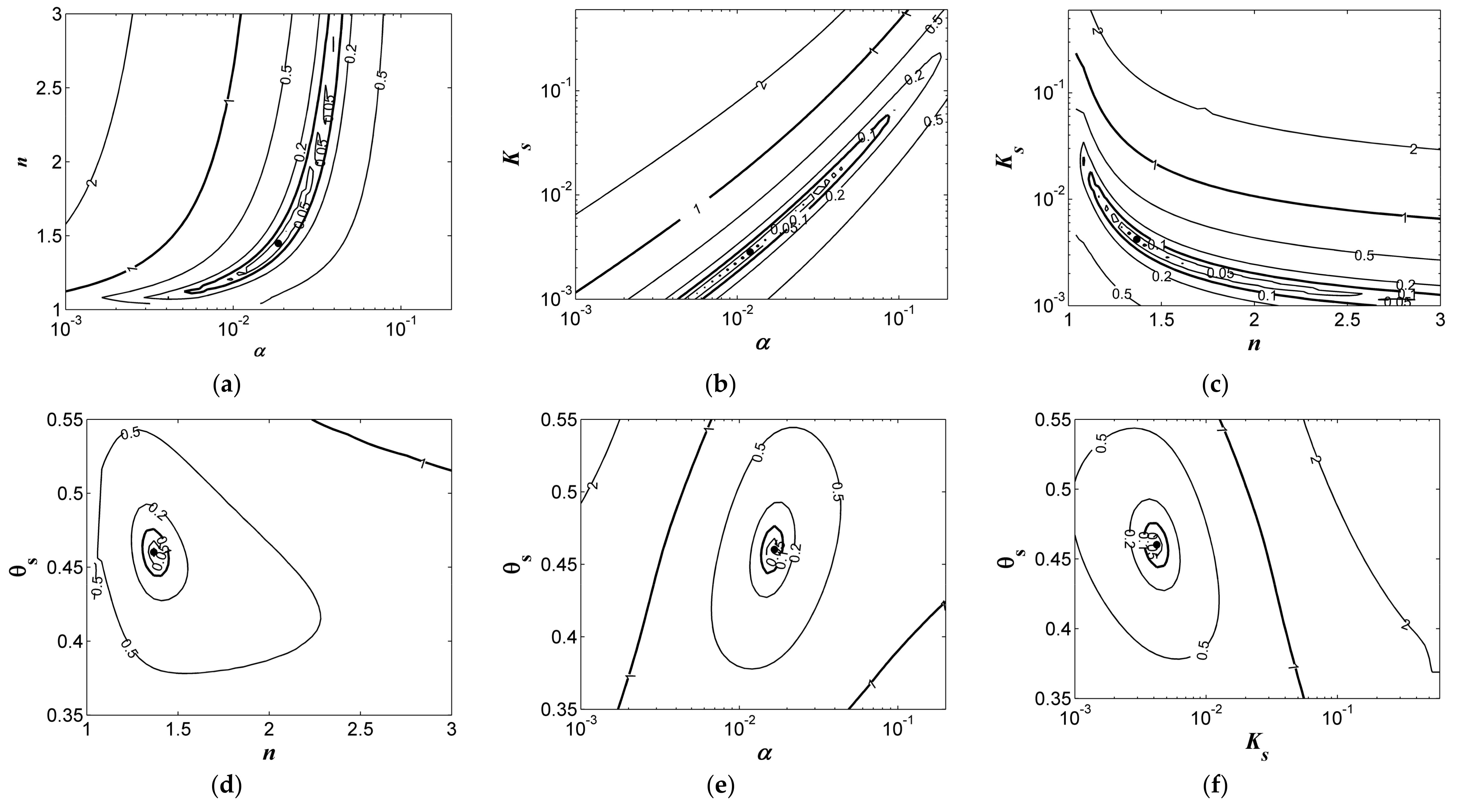
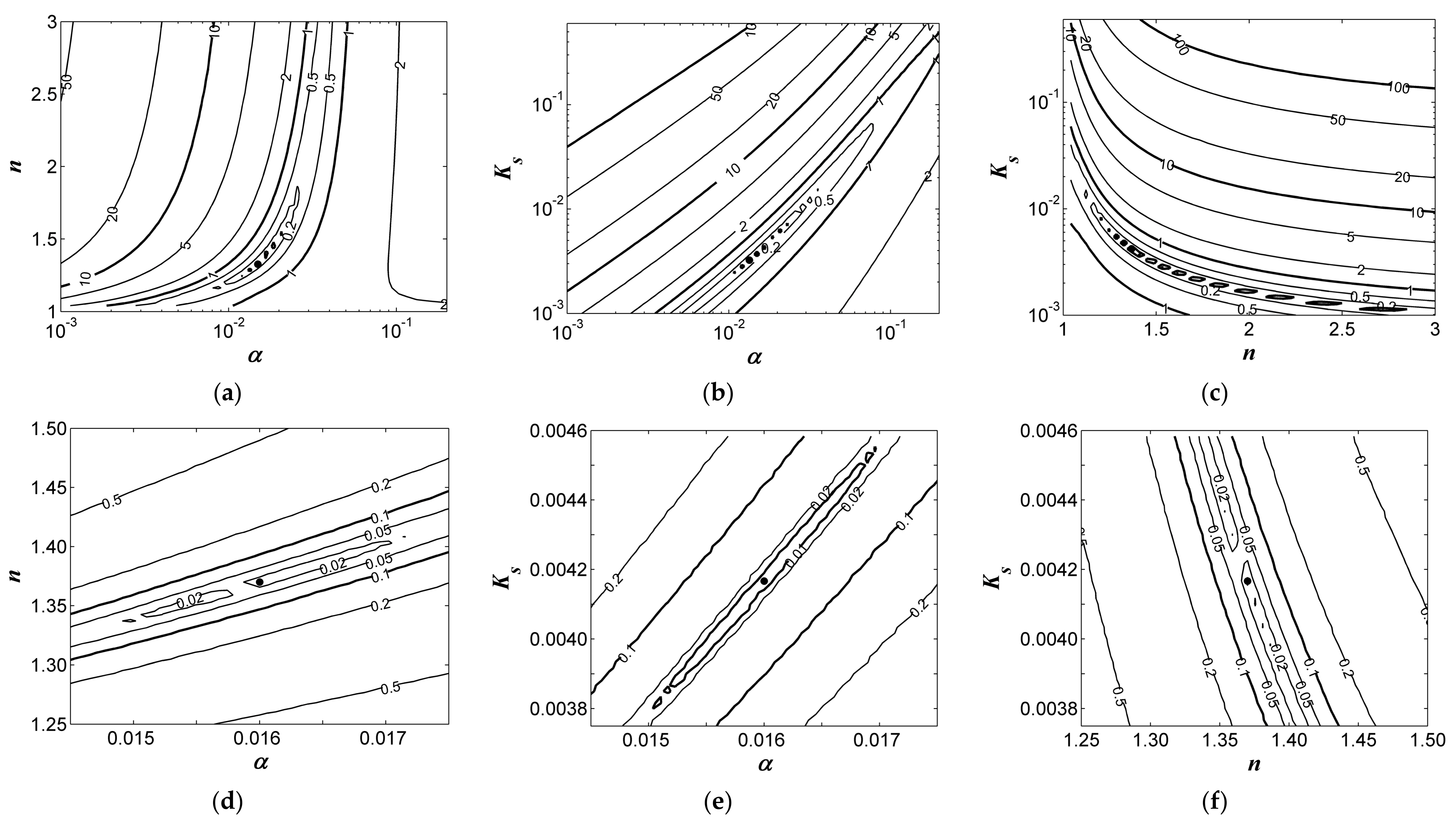
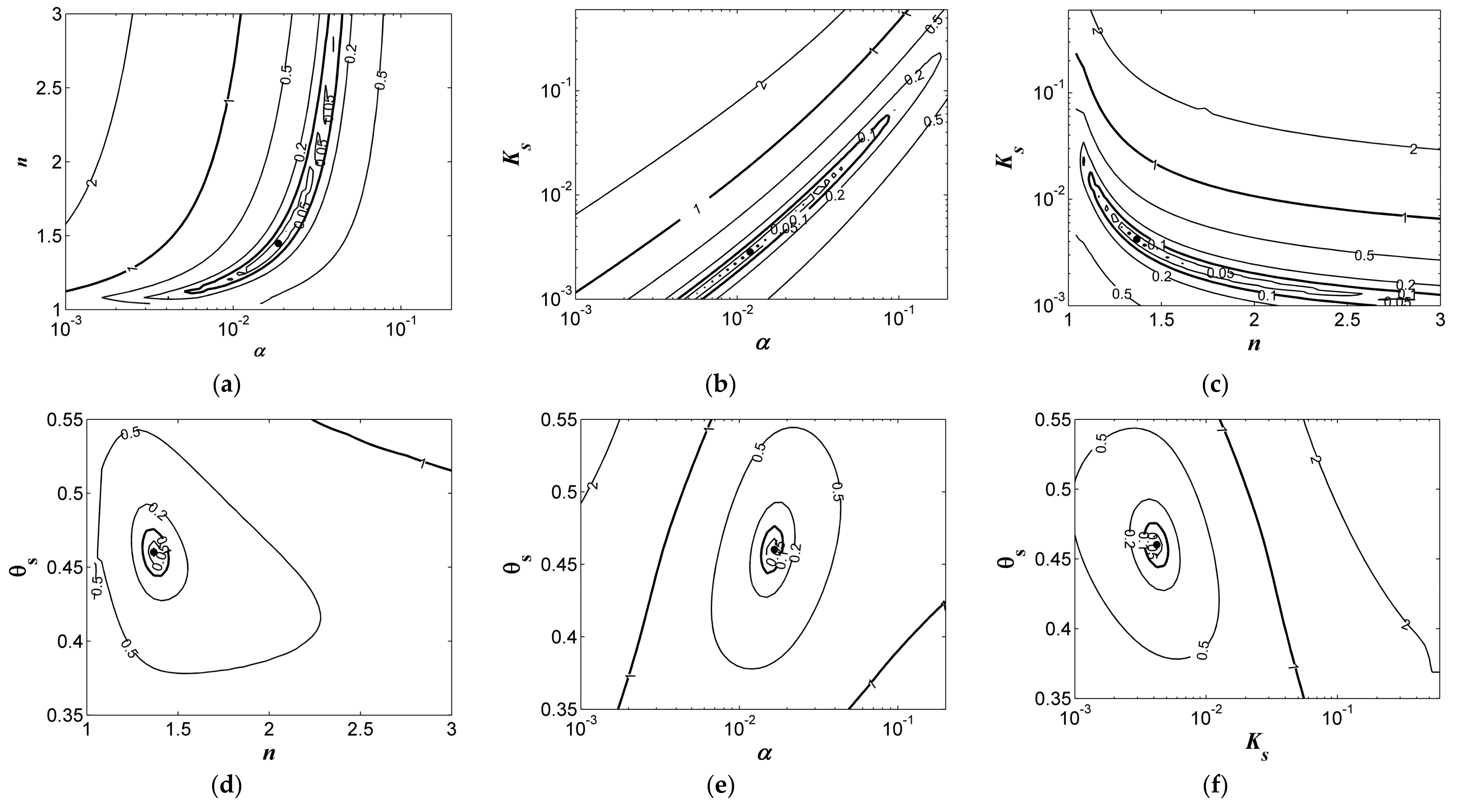
Figure 4.
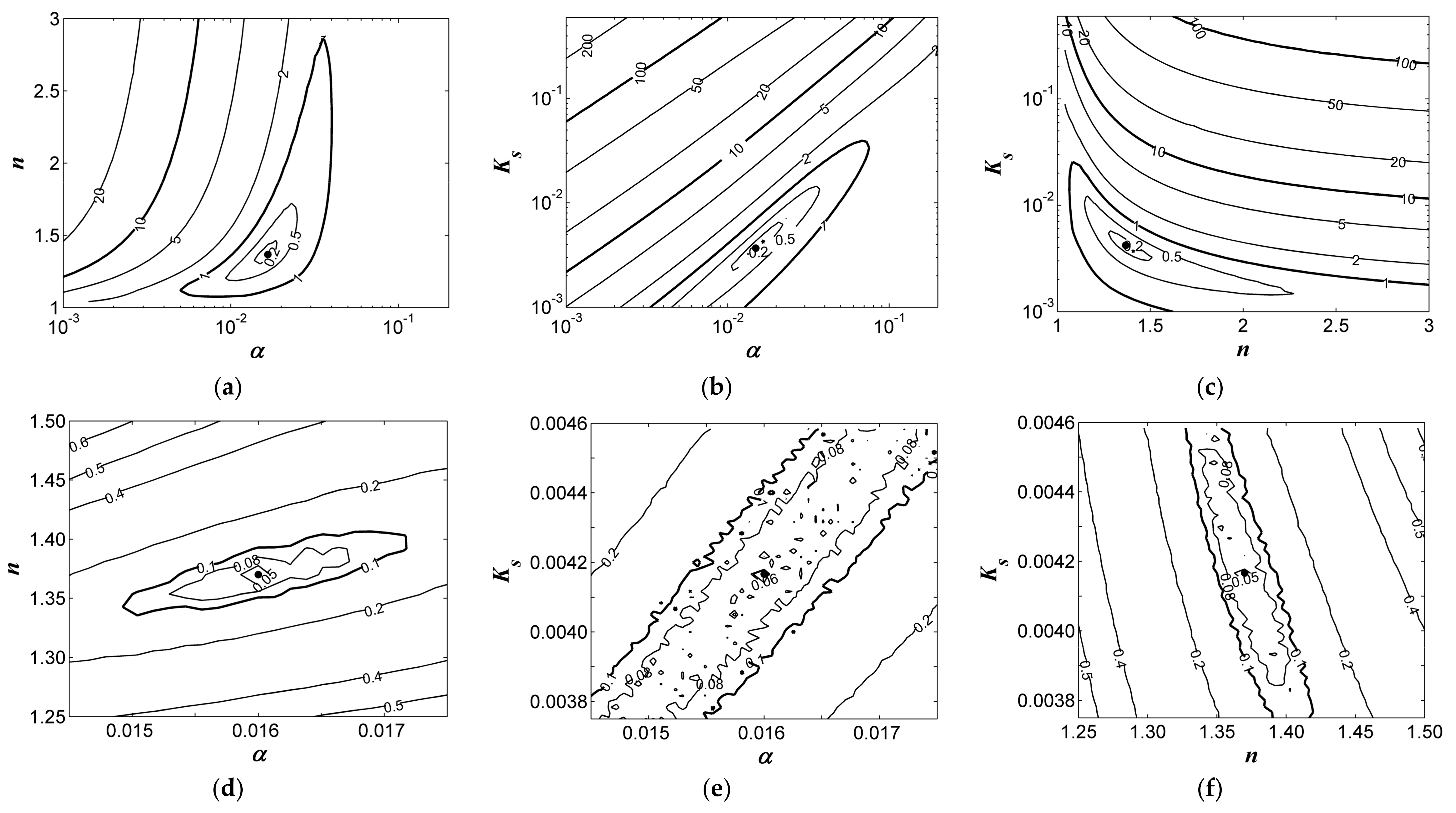
Contours of objective function ψ(θfinal) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a) α–n; (b) α–Ks; (c) n–Ks; (d) n–θs; (e) α–θs; and (f) Ks–θs parameter planes. The solid circles are the true parameters.
Figure 4.
Contours of objective function ψ(θfinal) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a) α–n; (b) α–Ks; (c) n–Ks; (d) n–θs; (e) α–θs; and (f) Ks–θs parameter planes. The solid circles are the true parameters.
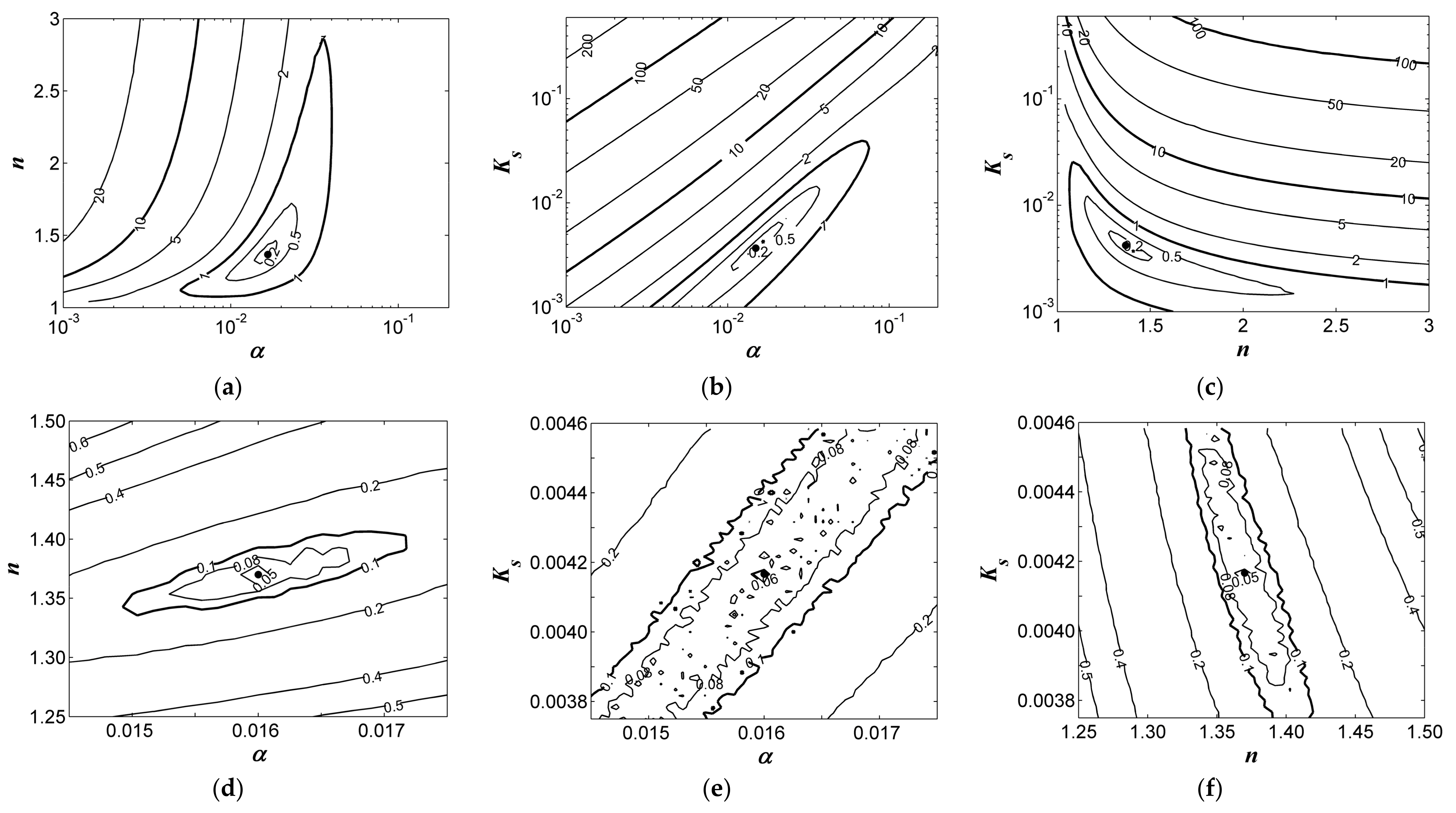
Figure 5.
Contours of objective function ψ(v) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a,d) α–n; (b, e) α–Ks; and (c,f) n–Ks parameter planes. (a–c) depict the global scale, while (d–f) depict the local scale near the minimum. The solid circles are the true parameters.
Figure 5.
Contours of objective function ψ(v) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a,d) α–n; (b, e) α–Ks; and (c,f) n–Ks parameter planes. (a–c) depict the global scale, while (d–f) depict the local scale near the minimum. The solid circles are the true parameters.
Figure 6.
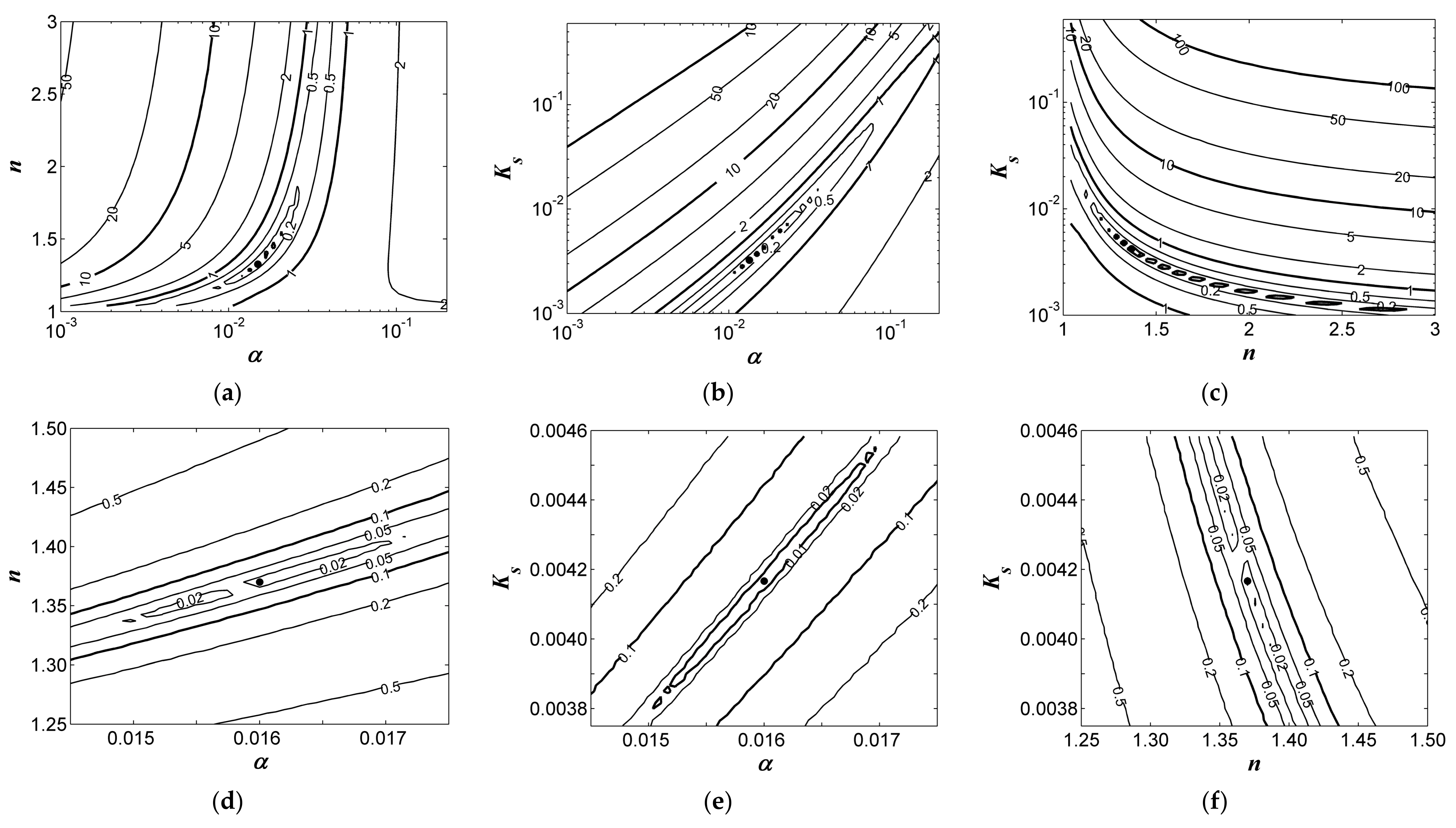
Contours (in detail) of objective function ψ(Q) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a,d) α–n; (b,e) α–Ks; and (c,f) n–Ks parameter planes. (a–c) depict the global scale, while (d–f) depict the local scale near the minimum. The solid circles are the true parameters.
Figure 6.
Contours (in detail) of objective function ψ(Q) of silt under θinitial equal to a 40% effective saturation degree. The hydraulic parameters of silt: θr = 0.034 cm3 cm−3; θs = 0.46 cm3 cm−3; α = 0.016 cm−1; n = 1.37; Ks = 0.0042 cm min−1. Results are plotted in the: (a,d) α–n; (b,e) α–Ks; and (c,f) n–Ks parameter planes. (a–c) depict the global scale, while (d–f) depict the local scale near the minimum. The solid circles are the true parameters.
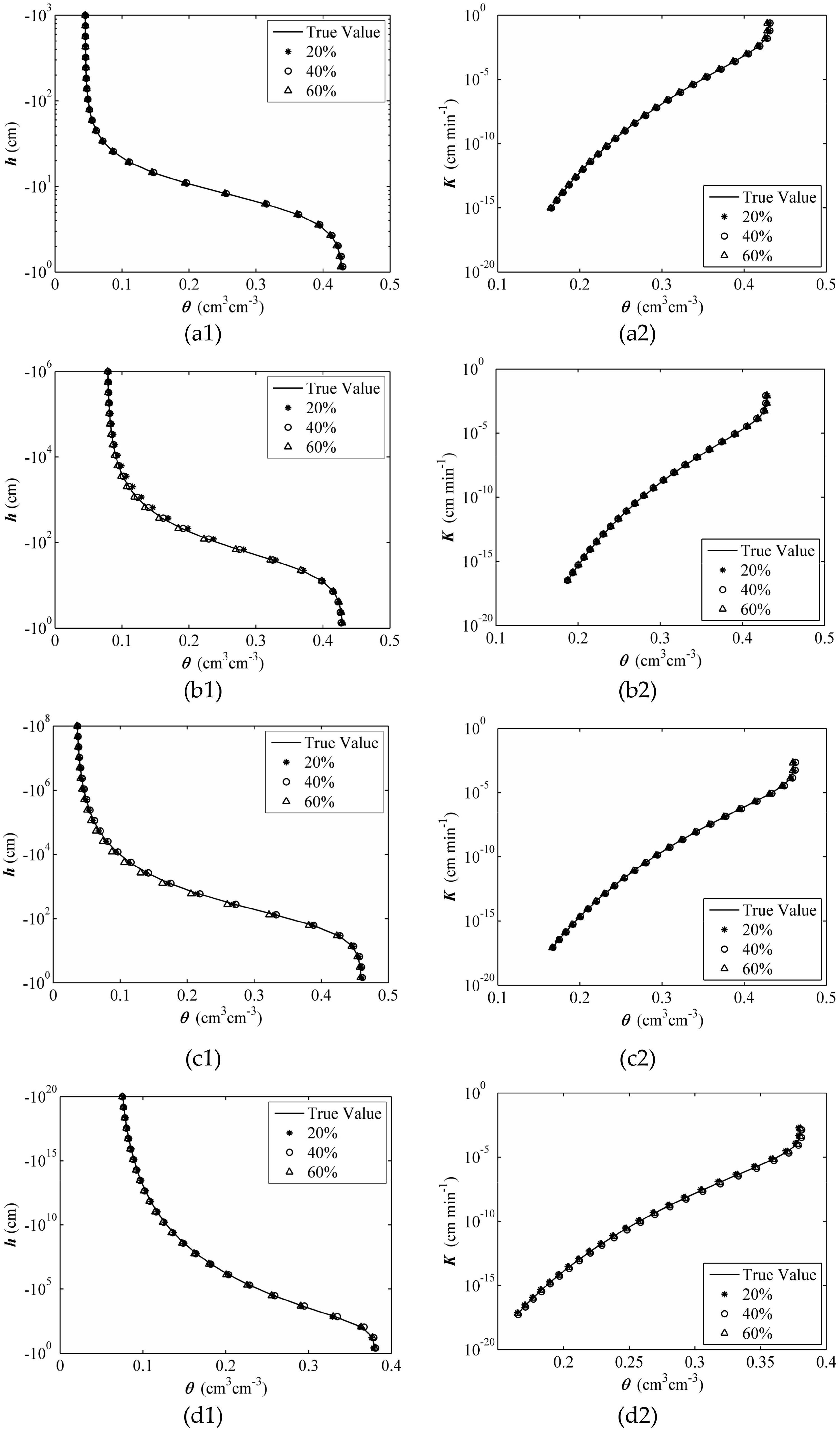
Figure 7.
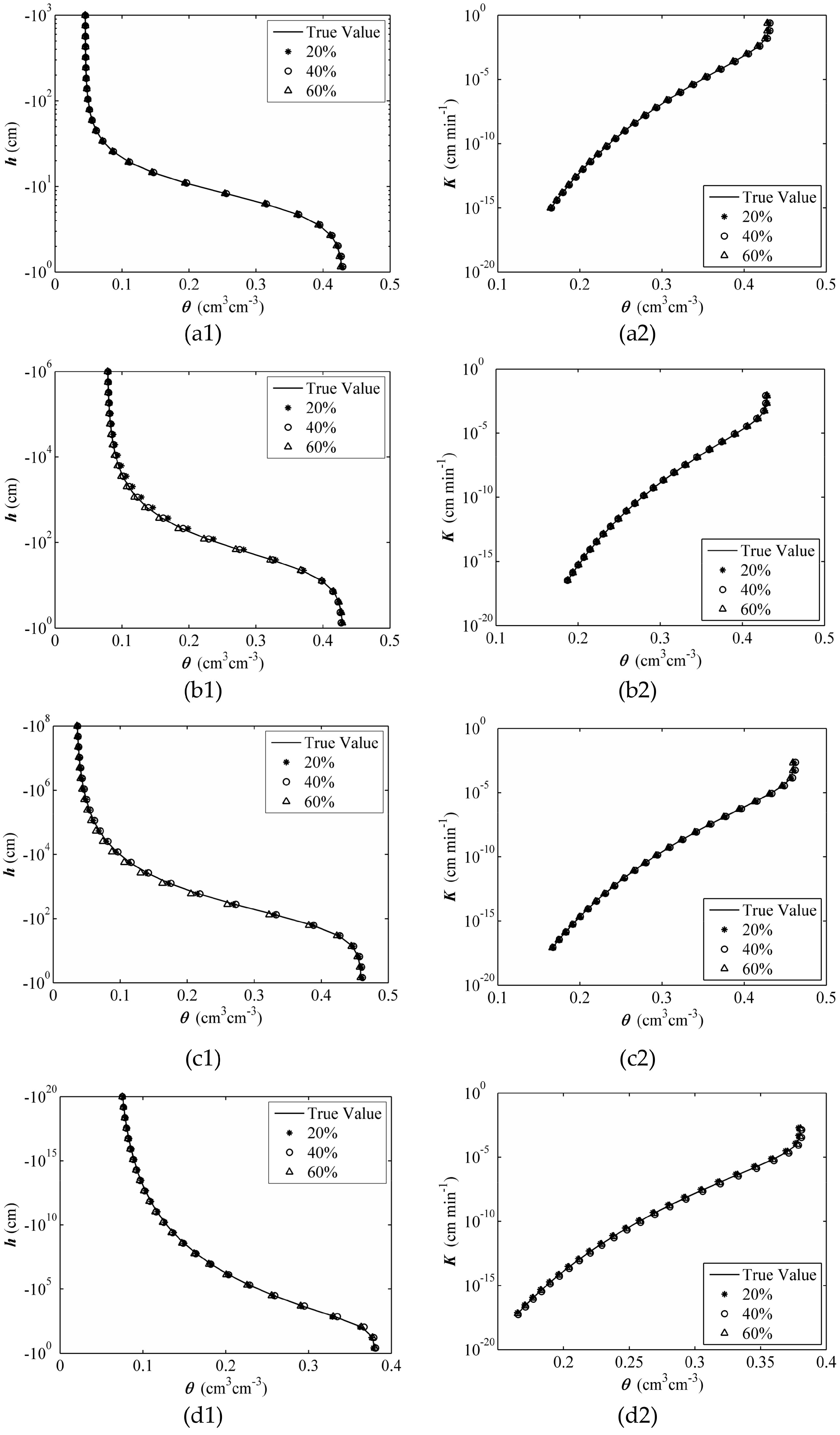
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) for various treatments (20% effective saturation degree for initial water content, circle; 40% effective saturation degree for initial water content, triangle; 60% effective saturation degree for initial water content, square; true value, line): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Figure 7.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) for various treatments (20% effective saturation degree for initial water content, circle; 40% effective saturation degree for initial water content, triangle; 60% effective saturation degree for initial water content, square; true value, line): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
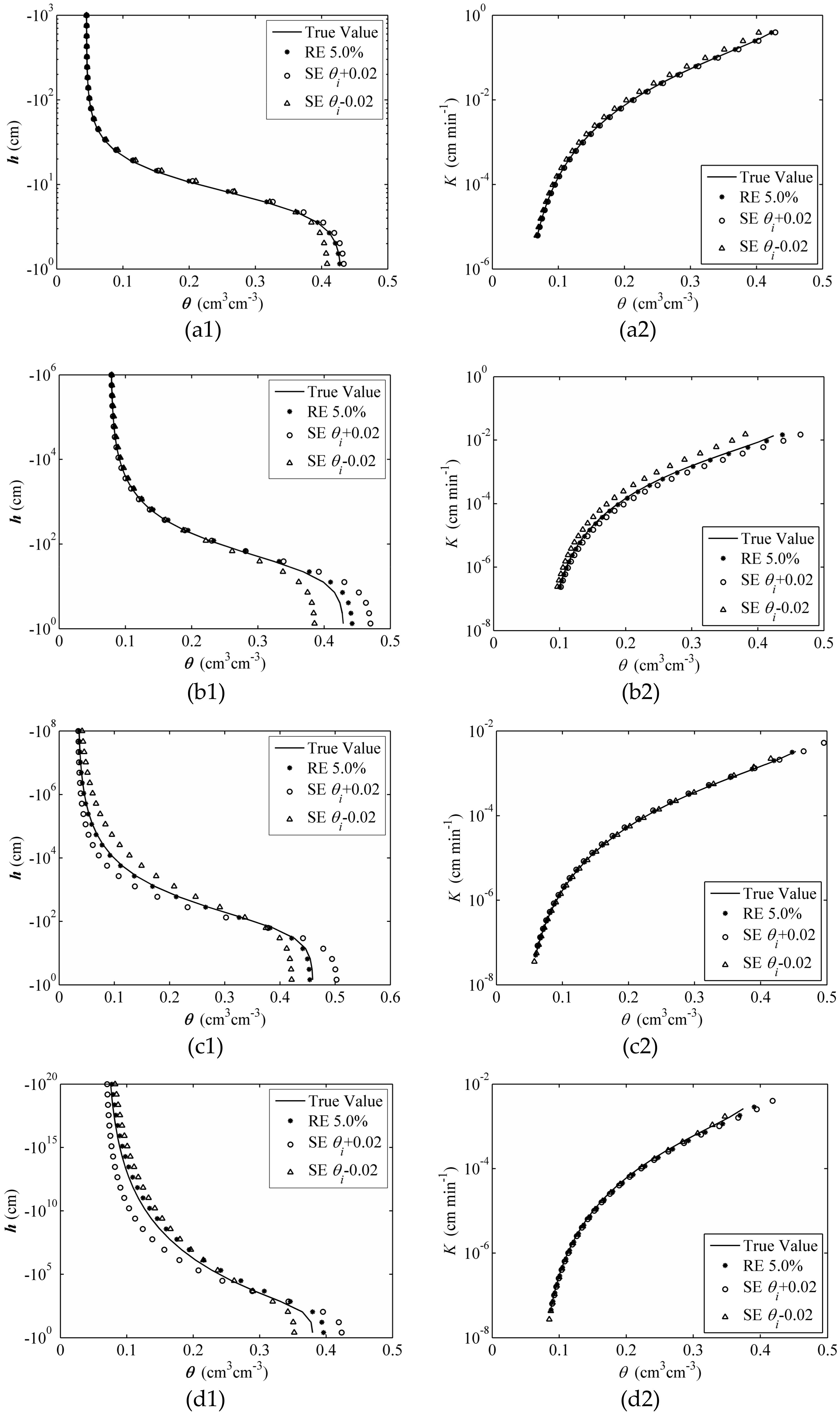
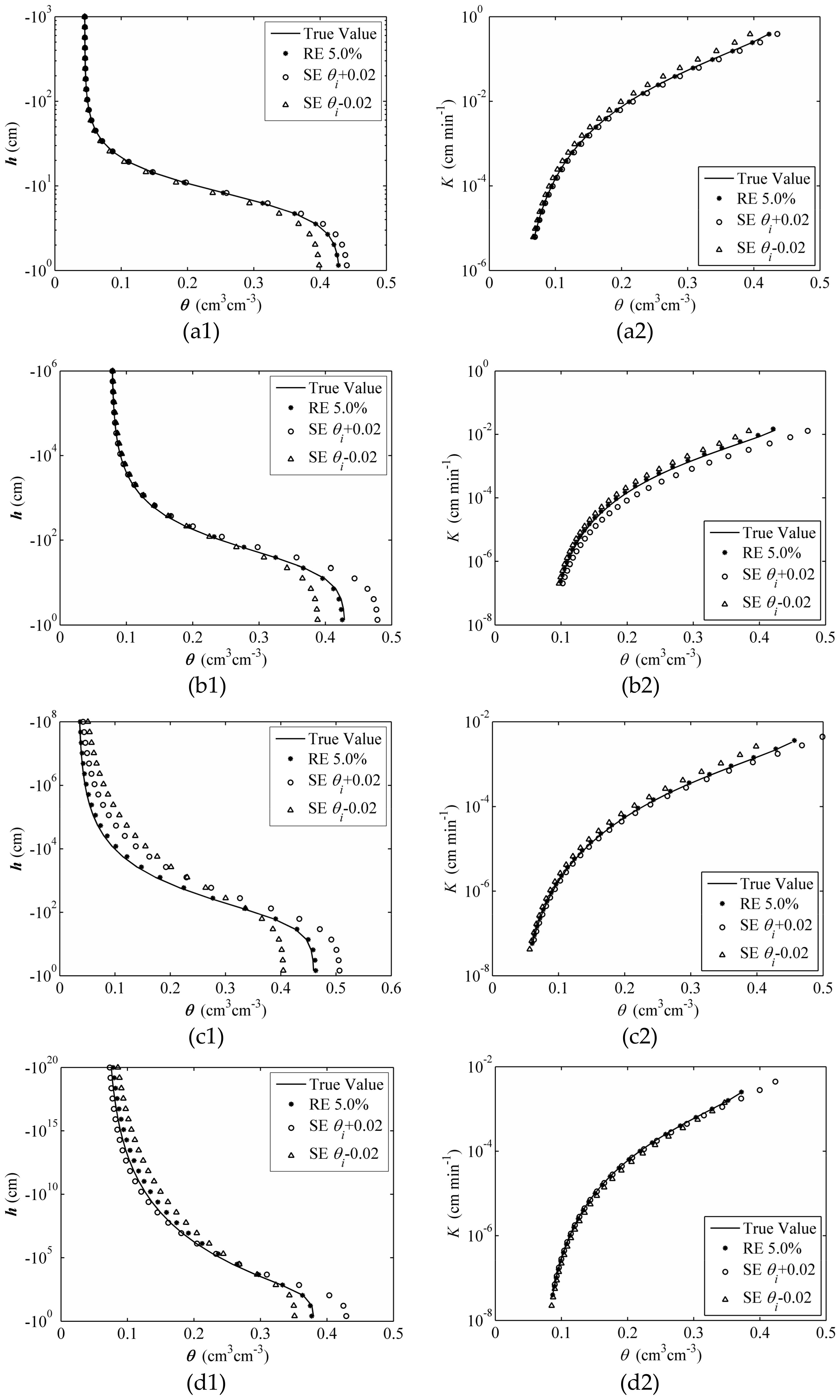
Figure 8.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors (RE) and system errors (SE) for various treatments with objective function ψ(θinitial): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Figure 8.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors (RE) and system errors (SE) for various treatments with objective function ψ(θinitial): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
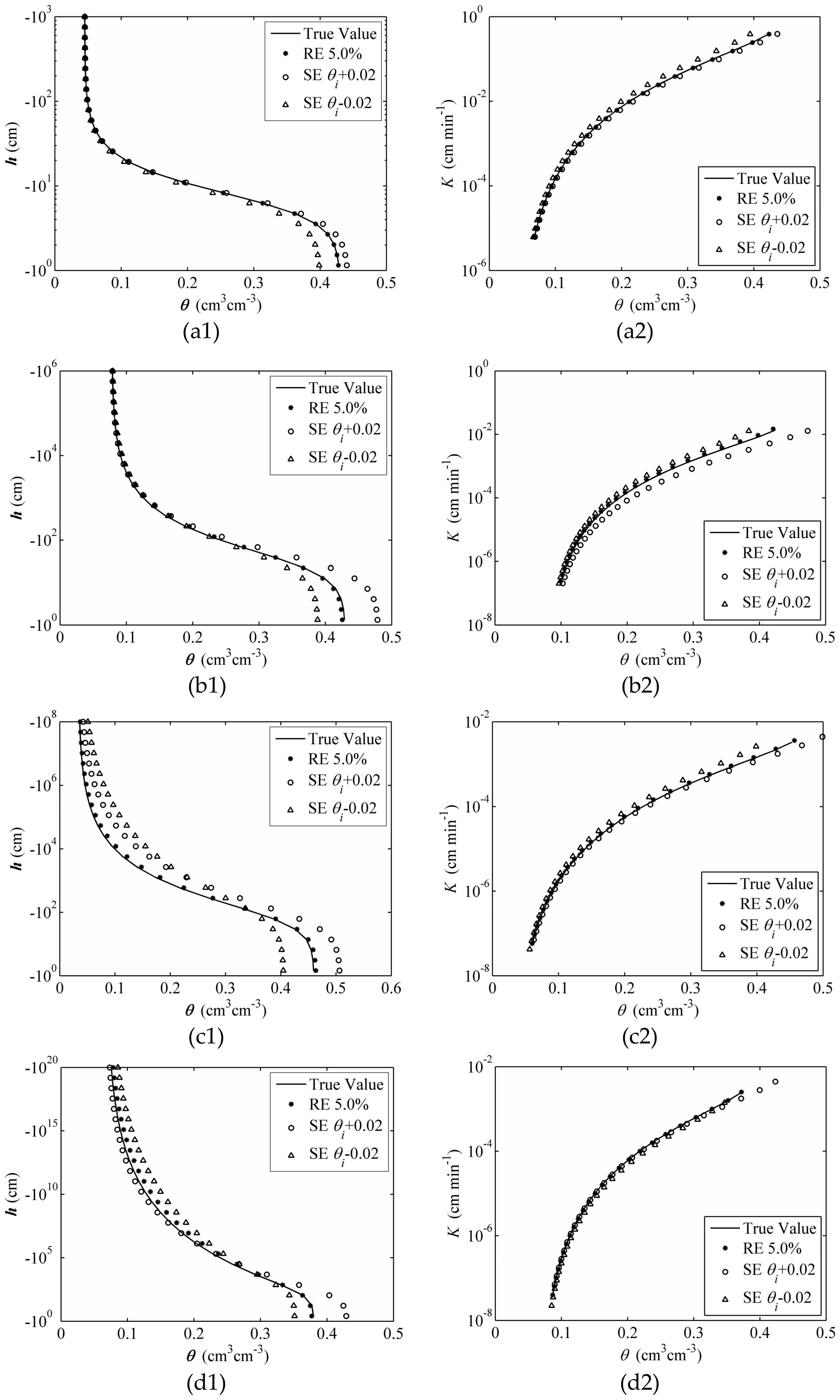
Figure 9.
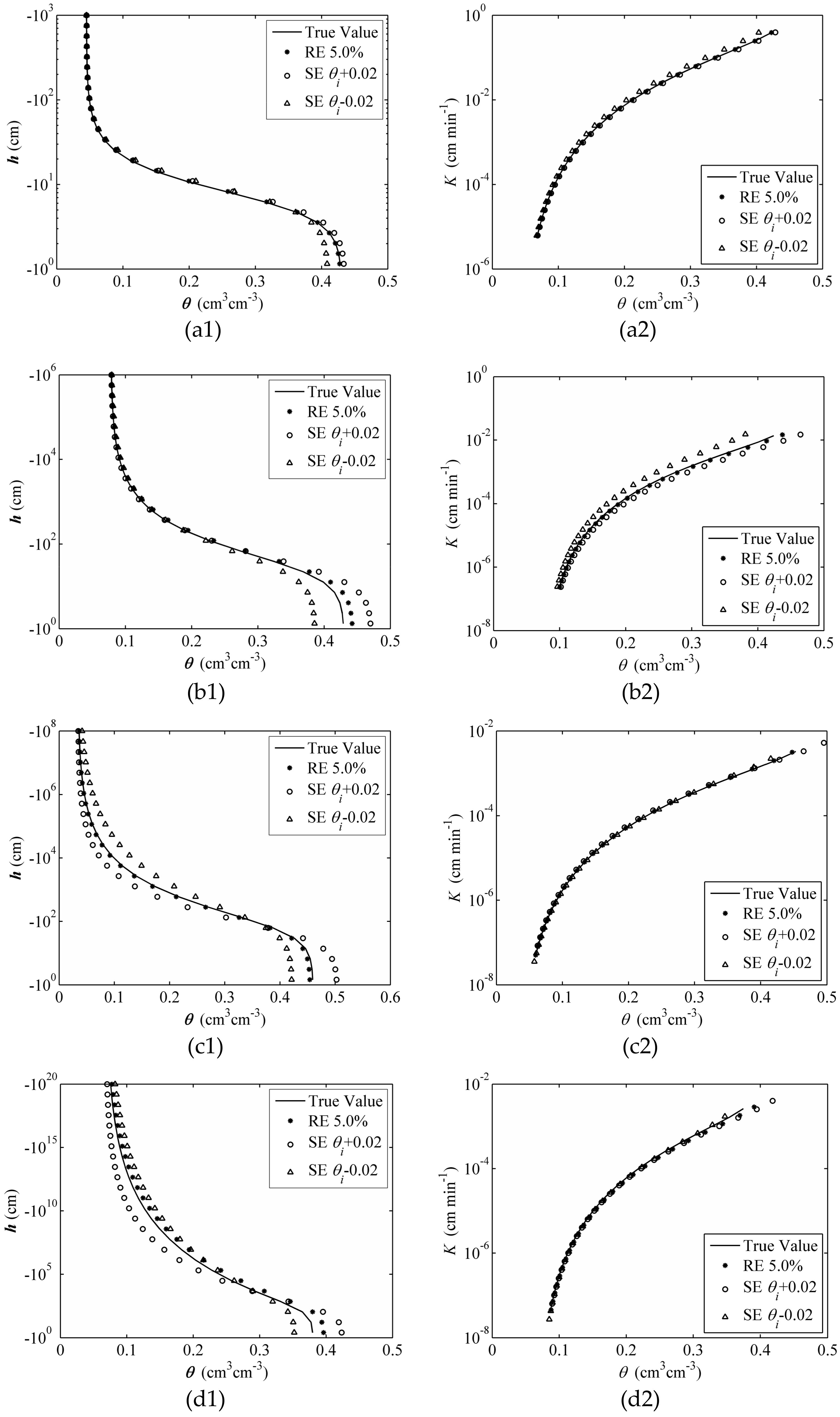
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors (RE) and system errors (SE) for various treatments with objective function ψ(θfinal): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Figure 9.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors (RE) and system errors (SE) for various treatments with objective function ψ(θfinal): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
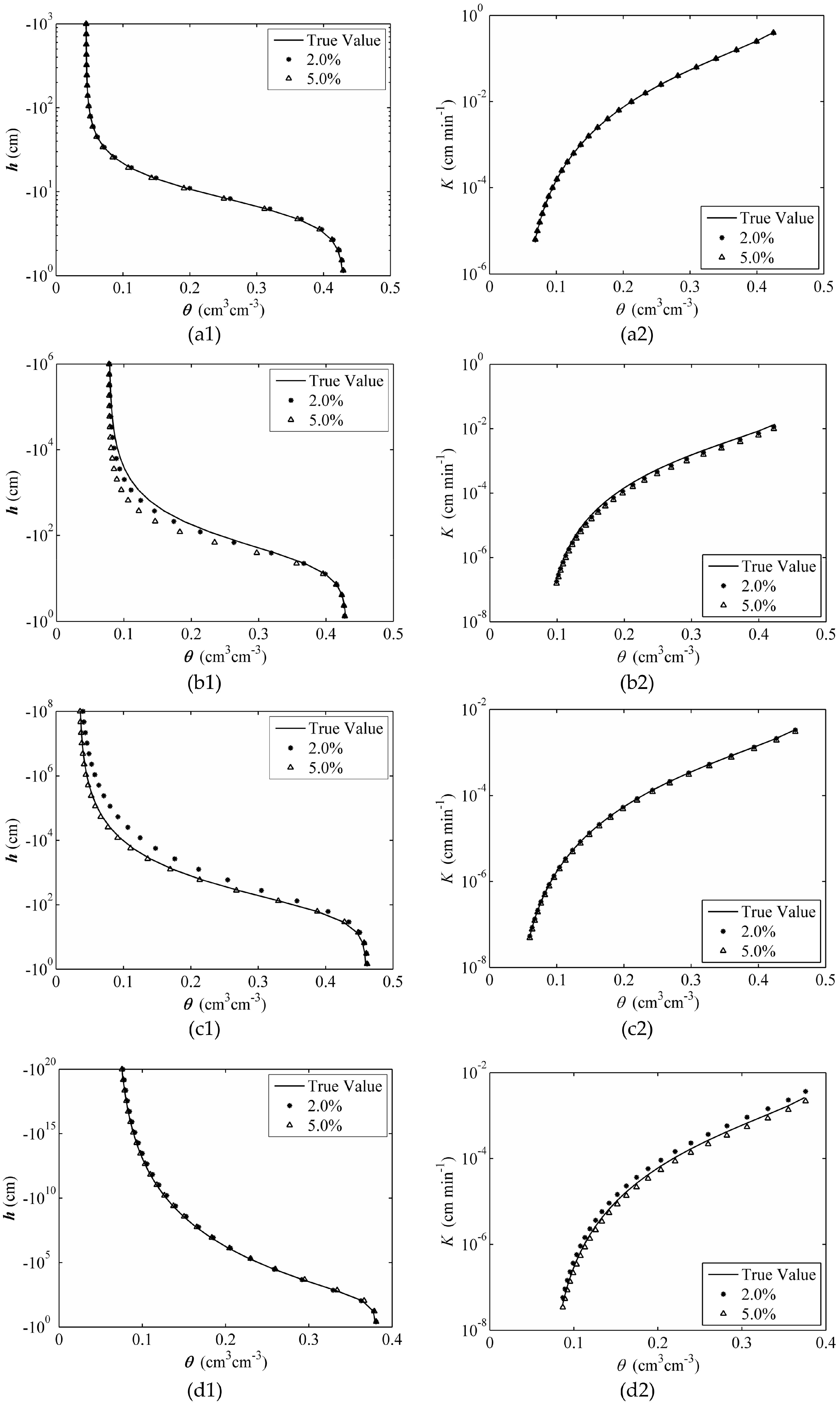
Figure 10.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors and system errors for various treatments with objective function ψ(Q) (random error (RE), 2.0%, circle; random error, 5.0%, triangle; true value, line): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Figure 10.
Comparison of SWRCs (a1,b1,c1,d1) and conductivity curves (a2,b2,c2,d2) with random errors and system errors for various treatments with objective function ψ(Q) (random error (RE), 2.0%, circle; random error, 5.0%, triangle; true value, line): (a) Sand; (b) Loam; (c) Silt; and (d) Clay.
Table 1.
Soil hydraulic parameters of the van Genuchten–Mualem model for 12 soils.
Table 1.
Soil hydraulic parameters of the van Genuchten–Mualem model for 12 soils.
| Texture Class | θr | θs | α | n | l | Ks | α/Ks |
|---|
| cm3 cm−3 | cm3 cm−3 | cm−1 | - | - | cm min−1 | |
|---|
| Sand | 0.045 | 0.43 | 0.145 | 2.68 | 0.5 | 0.49500 | 0.293 |
| Loamy sand | 0.057 | 0.41 | 0.124 | 2.28 | 0.5 | 0.24317 | 0.510 |
| Sandy loam | 0.065 | 0.41 | 0.075 | 1.89 | 0.5 | 0.07367 | 1.018 |
| Loam | 0.078 | 0.43 | 0.036 | 1.56 | 0.5 | 0.01733 | 2.077 |
| Silt | 0.034 | 0.46 | 0.016 | 1.37 | 0.5 | 0.00417 | 3.840 |
| Silt loam | 0.067 | 0.45 | 0.020 | 1.41 | 0.5 | 0.00750 | 2.667 |
| Sandy clay loam | 0.100 | 0.39 | 0.059 | 1.48 | 0.5 | 0.02183 | 2.702 |
| Clay loam | 0.095 | 0.41 | 0.019 | 1.31 | 0.5 | 0.00433 | 4.385 |
| Silty clay loam | 0.089 | 0.43 | 0.010 | 1.23 | 0.5 | 0.00117 | 8.571 |
| Sandy clay | 0.100 | 0.38 | 0.027 | 1.23 | 0.5 | 0.00200 | 13.500 |
| Silty clay | 0.070 | 0.36 | 0.005 | 1.09 | 0.5 | 0.00033 | 15.000 |
| Clay | 0.068 | 0.38 | 0.008 | 1.09 | 0.5 | 0.00333 | 2.400 |
Table 2.
Inverse scope of soil hydraulic parameters.
Table 2.
Inverse scope of soil hydraulic parameters.
| Scope | θs | α | n | Ks | α/Ks |
|---|
| - | cm−1 | - | cm min−1 | - |
|---|
| min | 0.35 | 0.001 | 1.05 | 0.00010 | 0.2 |
| max | 0.55 | 0.200 | 3.00 | 0.60000 | 20 |
Table 3.
Estimated parameters under three initial water content levels for four types of soil.
Table 3.
Estimated parameters under three initial water content levels for four types of soil.
| Soil | Category | θr | θs | α | n | Ks |
|---|
| cm3 cm−3 | cm3 cm−3 | cm−1 | - | cm min−1 |
|---|
| Sand | 20% | 0.0450 | 0.4303 | 0.1455 | 2.6967 | 0.4922 |
| 40% | 0.4314 | 0.1449 | 2.6751 | 0.4971 |
| 60% | 0.4285 | 0.1448 | 2.6967 | 0.4898 |
| True Value | 0.0450 | 0.4300 | 0.1450 | 2.6800 | 0.4950 |
| Loam | 20% | 0.0780 | 0.4302 | 0.0359 | 1.5196 | 0.0181 |
| 40% | 0.4285 | 0.0356 | 1.5522 | 0.0170 |
| 60% | 0.4299 | 0.0363 | 1.5798 | 0.0171 |
| True Value | 0.0780 | 0.4300 | 0.0360 | 1.5600 | 0.0173 |
| Silt | 20% | 0.0340 | 0.4606 | 0.0161 | 1.3739 | 0.0042 |
| 40% | 0.4623 | 0.0163 | 1.3639 | 0.0044 |
| 60% | 0.4594 | 0.0166 | 1.3905 | 0.0041 |
| True Value | 0.0340 | 0.4600 | 0.0160 | 1.3700 | 0.0042 |
| Clay | 20% | 0.0680 | 0.3787 | 0.0088 | 1.0889 | 0.0039 |
| 40% | 0.3812 | 0.0069 | 1.0919 | 0.0027 |
| 60% | 0.3803 | 0.0084 | 1.0919 | 0.0033 |
| True Value | 0.0680 | 0.3800 | 0.0080 | 1.0900 | 0.0033 |
Table 4.
Soil water content errors from estimated SWRCs and SWCCs for the four types of soil.
Table 4.
Soil water content errors from estimated SWRCs and SWCCs for the four types of soil.
| Soil | From h(θ) | From K(θ) |
|---|
| MAE | RMSE | PBIAS (%) | NS | MAE | RMSE | PBIAS (%) | NS |
|---|
| Sand | 0.00069 | 0.00082 | −0.0147 | 0.9999 | 0.00014 | 0.00059 | 0.4023 | 0.9999 |
| Loam | 0.00039 | 0.00060 | 0.0987 | 0.9999 | 0.00002 | 0.00008 | −0.5136 | 0.9991 |
| Silt | 0.00076 | 0.00097 | −0.1603 | 0.9999 | 0.00000 | 0.00003 | −1.2131 | 0.9985 |
| Clay | 0.00060 | 0.00071 | −0.0161 | 0.9999 | 0.00002 | 0.00008 | −0.2725 | 0.9778 |
Table 5.
Estimated parameters considering random and system errors on initial and final water content levels for the four typical soils.
Table 5.
Estimated parameters considering random and system errors on initial and final water content levels for the four typical soils.
| Texture Class | Error Source | Error Category | θr | θs | α | n | Ks |
|---|
| cm3 cm−3 | cm3 cm−3 | cm−1 | - | cm min−1 |
|---|
| Sand | θinitial | RE | 5.0% | 0.0450 | 0.4292 | 0.1430 | 2.6512 | 0.4912 |
| SE | θi + 0.02 | 0.4352 | 0.1389 | 2.6931 | 0.4959 |
| θi − 0.02 | 0.4096 | 0.1281 | 2.6988 | 0.4912 |
| θfinal | RE | 5.0% | 0.4296 | 0.1455 | 2.6780 | 0.4867 |
| SE | θf + 0.02 | 0.4423 | 0.1464 | 2.6874 | 0.4943 |
| θf − 0.02 | 0.4004 | 0.1449 | 2.6994 | 0.4877 |
| True Parameter | 0.0450 | 0.4300 | 0.1450 | 2.6800 | 0.4950 |
| Loam | θinitial | RE | 5.0% | 0.0780 | 0.4435 | 0.0376 | 1.5437 | 0.0185 |
| SE | θi + 0.02 | 0.4712 | 0.0404 | 1.5799 | 0.0189 |
| θi − 0.02 | 0.3866 | 0.0341 | 1.5151 | 0.0191 |
| θfinal | RE | 5.0% | 0.4266 | 0.0365 | 1.5265 | 0.0188 |
| SE | θf + 0.02 | 0.4798 | 0.0362 | 1.5761 | 0.0164 |
| θf − 0.02 | 0.3893 | 0.0328 | 1.5151 | 0.0162 |
| True Parameter | 0.0780 | 0.4300 | 0.0360 | 1.5600 | 0.0173 |
| Silt | θinitial | RE | 5.0% | 0.0340 | 0.4546 | 0.0159 | 1.3768 | 0.0040 |
| SE | θi + 0.02 | 0.5035 | 0.0233 | 1.4474 | 0.0067 |
| θi − 0.02 | 0.4218 | 0.0136 | 1.2787 | 0.0028 |
| θfinal | RE | 5.0% | 0.4640 | 0.0167 | 1.3493 | 0.0046 |
| SE | θf + 0.02 | 0.5072 | 0.0179 | 1.2825 | 0.0056 |
| θf − 0.02 | 0.4051 | 0.0143 | 1.2177 | 0.0033 |
| True Parameter | 0.0340 | 0.4600 | 0.0160 | 1.3700 | 0.0042 |
| Clay | θinitial | RE | 5.0% | 0.0680 | 0.3965 | 0.0087 | 1.0854 | 0.0036 |
| SE | θi + 0.02 | 0.4241 | 0.0105 | 1.1220 | 0.0051 |
| θi − 0.02 | 0.3522 | 0.0062 | 1.0729 | 0.0022 |
| θfinal | RE | 5.0% | 0.3774 | 0.0079 | 1.0824 | 0.0032 |
| SE | θf + 0.02 | 0.4296 | 0.0112 | 1.1015 | 0.0056 |
| θf − 0.02 | 0.3514 | 0.0054 | 1.0681 | 0.0018 |
| True Parameter | 0.0680 | 0.3800 | 0.0080 | 1.0900 | 0.0033 |
Table 6.
Soil water content errors from estimated SWRCs and SWRCs considering both random and system errors on initial and final water content levels for the four typical soils.
Table 6.
Soil water content errors from estimated SWRCs and SWRCs considering both random and system errors on initial and final water content levels for the four typical soils.
| Source | Texture Class | Error Category | From h(θ) | From K(θ) |
|---|
| RMSE | PBIAS | NS | RMSE | PBIAS | NS |
|---|
| cm3 cm−3 | % | - | cm3 cm−3 | % | - |
|---|
| θinitial | Sand | RE | 5.0% | 0.0018 | 0.5904 | 0.9999 | 0.0004 | −0.1621 | 1.0000 |
| SE | θi + 0.02 | 0.0057 | 2.3078 | 0.9986 | 0.0025 | 1.0377 | 0.9995 |
| θi − 0.02 | 0.0090 | −0.1401 | 0.9963 | 0.0096 | −4.0328 | 0.9924 |
| Loam | RE | 5.0% | 0.0065 | 2.4456 | 0.9976 | 0.0064 | 2.4012 | 0.9961 |
| SE | θi + 0.02 | 0.0176 | 4.4951 | 0.9826 | 0.0195 | 7.3571 | 0.9630 |
| θi − 0.02 | 0.0200 | −5.0526 | 0.9777 | 0.0205 | −7.7544 | 0.9589 |
| Silt | RE | 5.0% | 0.0035 | −1.5893 | 0.9995 | 0.0026 | −1.0461 | 0.9996 |
| SE | θi + 0.02 | 0.0243 | −3.6490 | 0.9771 | 0.0205 | 8.4125 | 0.9719 |
| θi − 0.02 | 0.0254 | 4.5768 | 0.9752 | 0.0181 | −7.4018 | 0.9783 |
| Clay | RE | 5.0% | 0.0098 | 5.0416 | 0.9905 | 0.0078 | 3.3498 | 0.9924 |
| SE | θi + 0.02 | 0.0209 | −5.1589 | 0.9565 | 0.0208 | 8.9355 | 0.9461 |
| θi − 0.02 | 0.0142 | 3.5927 | 0.9799 | 0.0132 | −5.6430 | 0.9785 |
| θfinal | Sand | RE | 5.0% | 0.0004 | −0.1770 | 1.0000 | 0.0002 | −0.0847 | 1.0000 |
| SE | θi + 0.02 | 0.0056 | 1.9248 | 0.9986 | 0.0058 | 2.4310 | 0.9973 |
| θi − 0.02 | 0.0149 | −5.7688 | 0.9901 | 0.0140 | −5.8520 | 0.9841 |
| Loam | RE | 5.0% | 0.0034 | 0.7115 | 0.9994 | 0.0016 | −0.6000 | 0.9998 |
| SE | θi + 0.02 | 0.0244 | 7.7015 | 0.9666 | 0.0235 | 8.8927 | 0.9460 |
| θi − 0.02 | 0.0182 | −4.1199 | 0.9815 | 0.0192 | −7.2658 | 0.9639 |
| Silt | RE | 5.0% | 0.0047 | 2.2844 | 0.9991 | 0.0019 | 0.7703 | 0.9998 |
| SE | θi + 0.02 | 0.0385 | 19.0410 | 0.9428 | 0.0223 | 9.1314 | 0.9669 |
| θi − 0.02 | 0.0433 | 10.3832 | 0.9275 | 0.0259 | −10.6175 | 0.9553 |
| Clay | RE | 5.0% | 0.0063 | 3.0968 | 0.9961 | 0.0012 | −0.5325 | 0.9998 |
| SE | θi + 0.02 | 0.0169 | 2.7096 | 0.9715 | 0.0234 | 10.0447 | 0.9319 |
| θi − 0.02 | 0.0188 | 6.7122 | 0.9646 | 0.0135 | −5.8014 | 0.9773 |
Table 7.
Estimated parameters considering random errors on cumulative infiltration for the four typical soils.
Table 7.
Estimated parameters considering random errors on cumulative infiltration for the four typical soils.
| Texture Class | Error Category | θr | θs | α | n | Ks |
|---|
| cm3 cm−3 | cm3 cm−3 | cm−1 | - | cm min−1 |
|---|
| Sand | 2.0% | 0.0450 | 0.4314 | 0.1416 | 2.6903 | 0.4930 |
| 5.0% | 0.4314 | 0.1475 | 2.6988 | 0.4987 |
| True Parameter | 0.0450 | 0.4300 | 0.1450 | 2.6800 | 0.4950 |
| Loam | 2.0% | 0.0780 | 0.4285 | 0.0341 | 1.6466 | 0.0144 |
| 5.0% | 0.4285 | 0.0365 | 1.7919 | 0.0124 |
| True Parameter | 0.0780 | 0.4300 | 0.0360 | 1.5600 | 0.0173 |
| Silt | 2.0% | 0.0340 | 0.4623 | 0.0147 | 1.2996 | 0.0043 |
| 5.0% | 0.4623 | 0.0160 | 1.3817 | 0.0039 |
| True Parameter | 0.0340 | 0.4600 | 0.0160 | 1.3700 | 0.0042 |
| Clay | 2.0% | 0.0680 | 0.3812 | 0.0104 | 1.0862 | 0.0046 |
| 5.0% | 0.3812 | 0.0074 | 1.0901 | 0.0027 |
| True Parameter | 0.0680 | 0.3800 | 0.0080 | 1.0900 | 0.0033 |
Table 8.
Soil water content errors from estimated SWRCs and SWCCs considering random errors on cumulative infiltration for the four typical soils.
Table 8.
Soil water content errors from estimated SWRCs and SWCCs considering random errors on cumulative infiltration for the four typical soils.
| Texture Class | Error Category | From h(θ) | From K(θ) |
|---|
| RMSE | PBIAS | NS | RMSE | PBIAS | NS |
|---|
| cm3cm−3 | % | - | cm3cm−3 | % | - |
|---|
| Sand | 2.0% | 0.0024 | 0.9524 | 0.9997 | 0.0007 | 0.2774 | 0.9997 |
| 5.0% | 0.0017 | −0.4835 | 0.9999 | 0.0007 | 0.2774 | 0.9999 |
| Loam | 2.0% | 0.0073 | −2.6803 | 0.9970 | 0.0007 | −0.2678 | 1.0000 |
| 5.0% | 0.0205 | −7.2361 | 0.9765 | 0.0007 | −0.2678 | 1.0000 |
| Silt | 2.0% | 0.0212 | 9.5425 | 0.9826 | 0.0011 | 0.4451 | 0.9999 |
| 5.0% | 0.0023 | −0.6324 | 0.9998 | 0.0011 | 0.4451 | 0.9999 |
| Clay | 2.0% | 0.0022 | 0.9520 | 0.9995 | 0.0006 | 0.2432 | 1.0000 |
| 5.0% | 0.0011 | 0.4907 | 0.9999 | 0.0006 | 0.2432 | 1.0000 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}