
Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights


 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
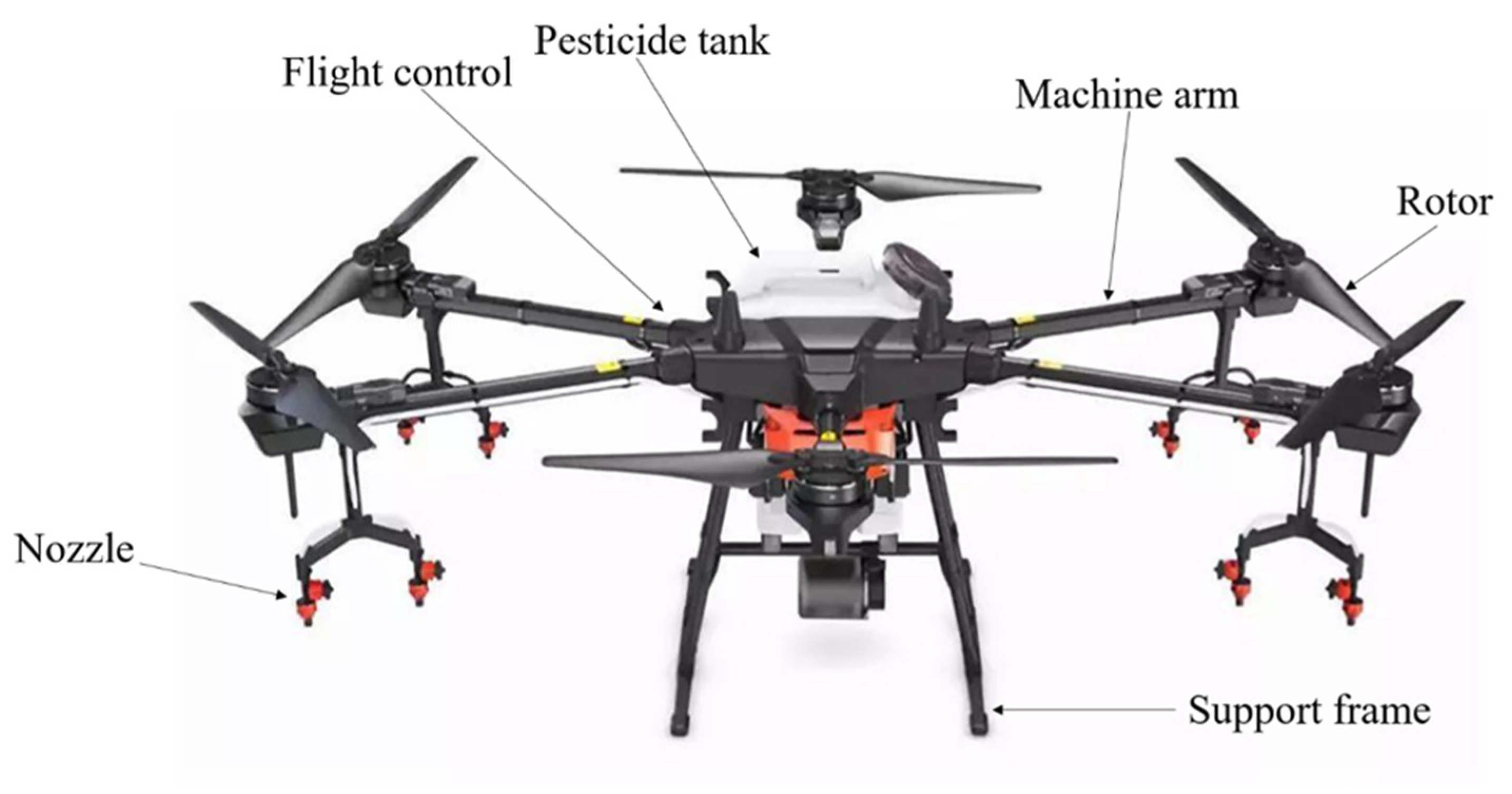
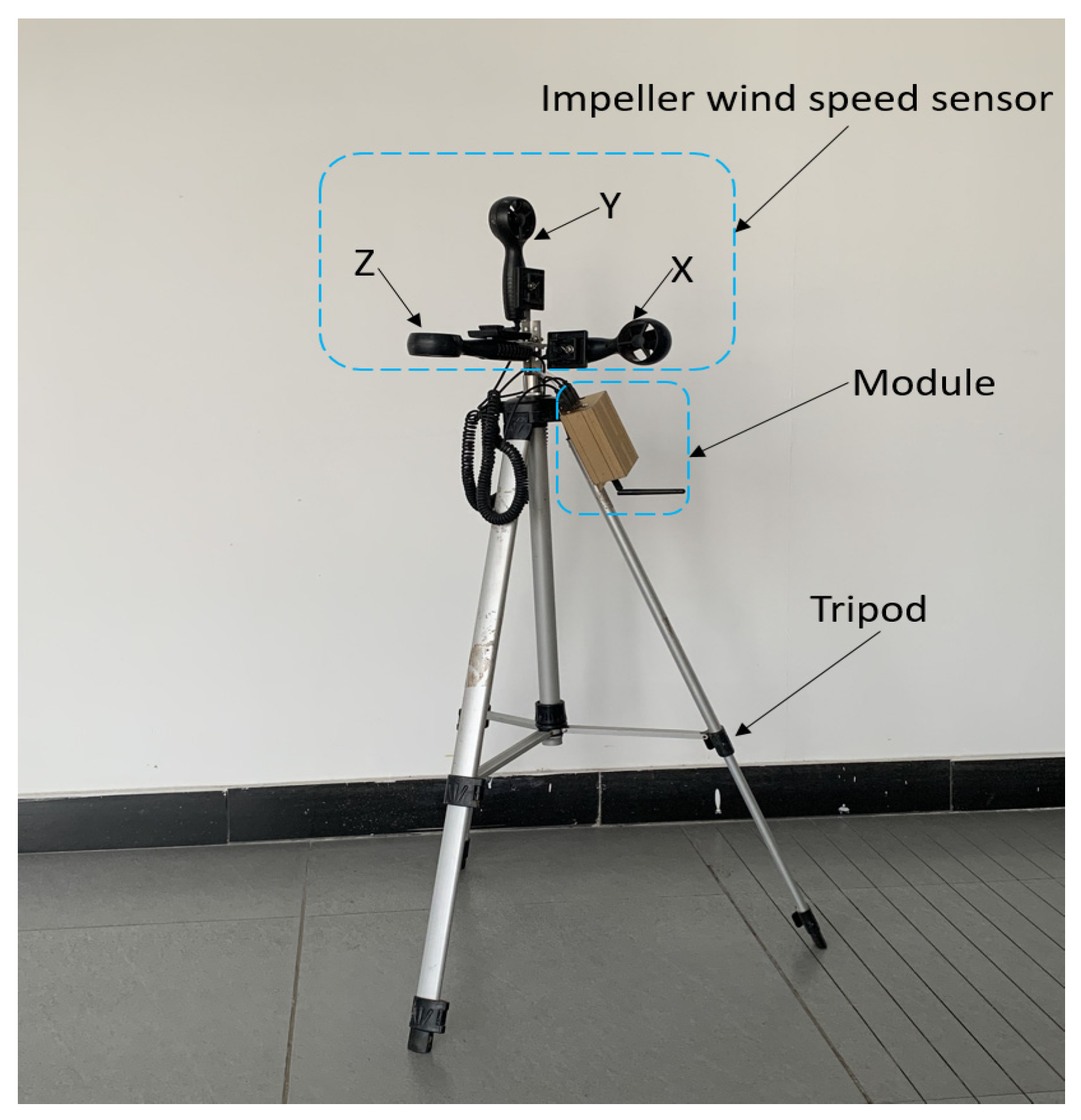
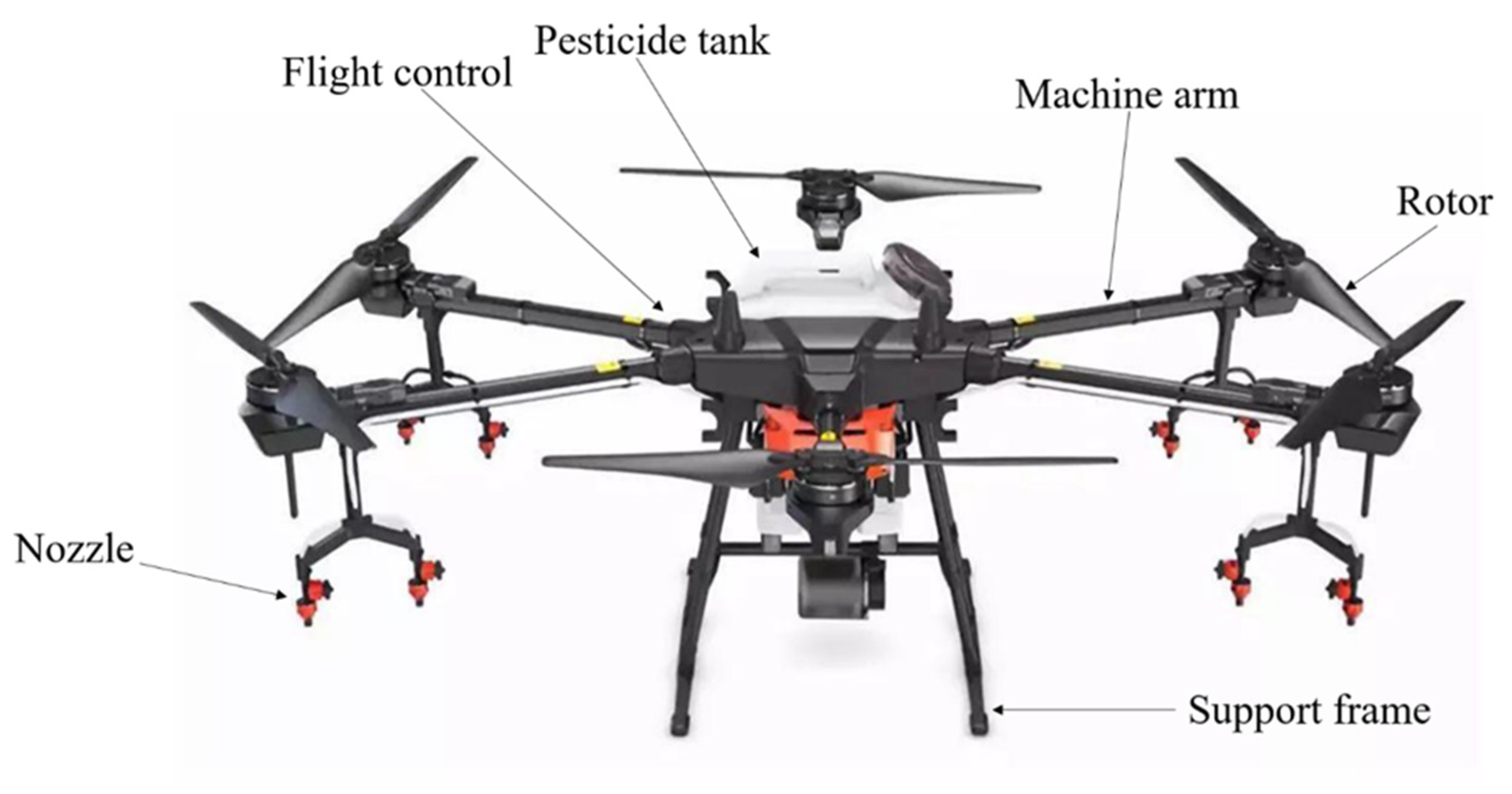
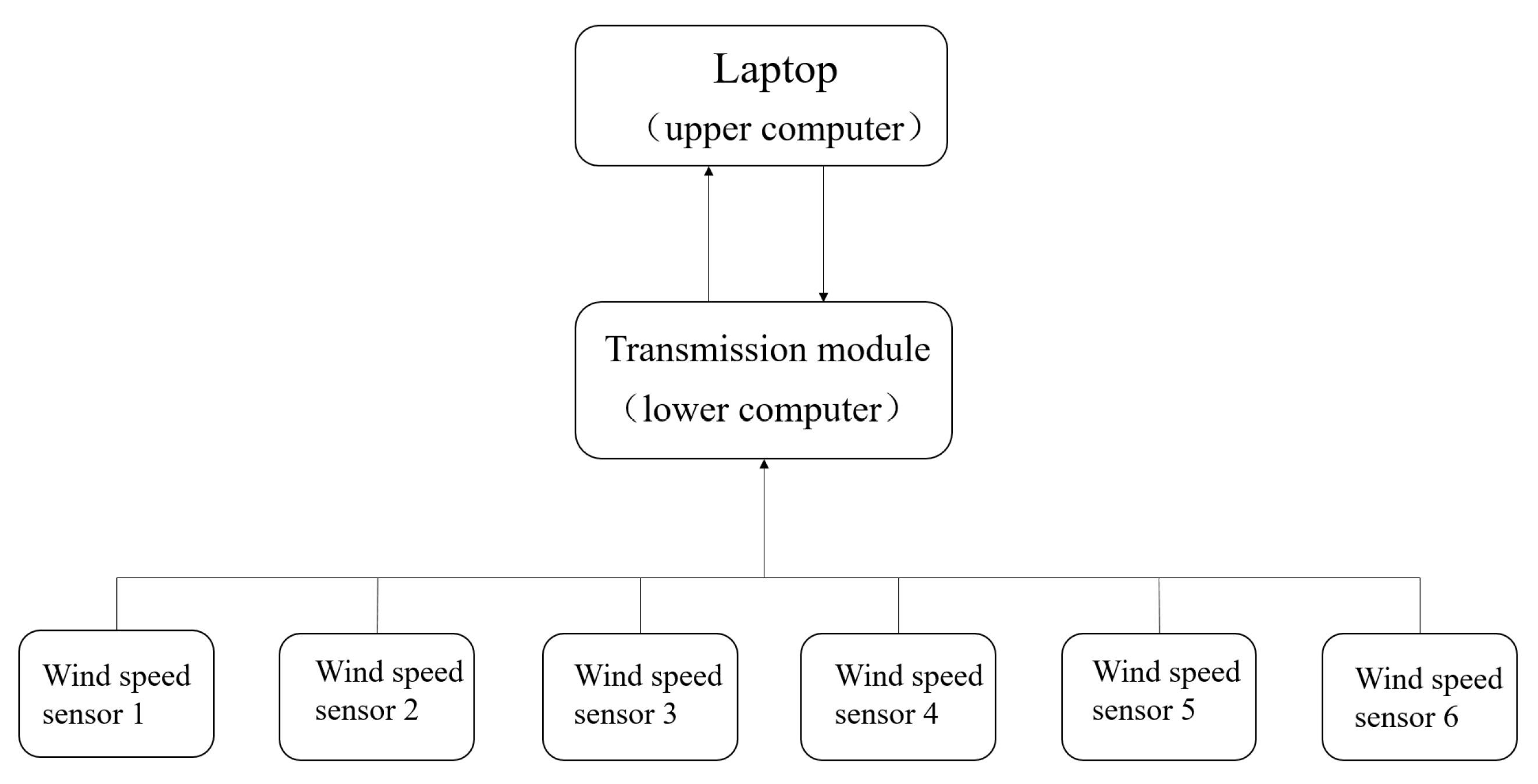
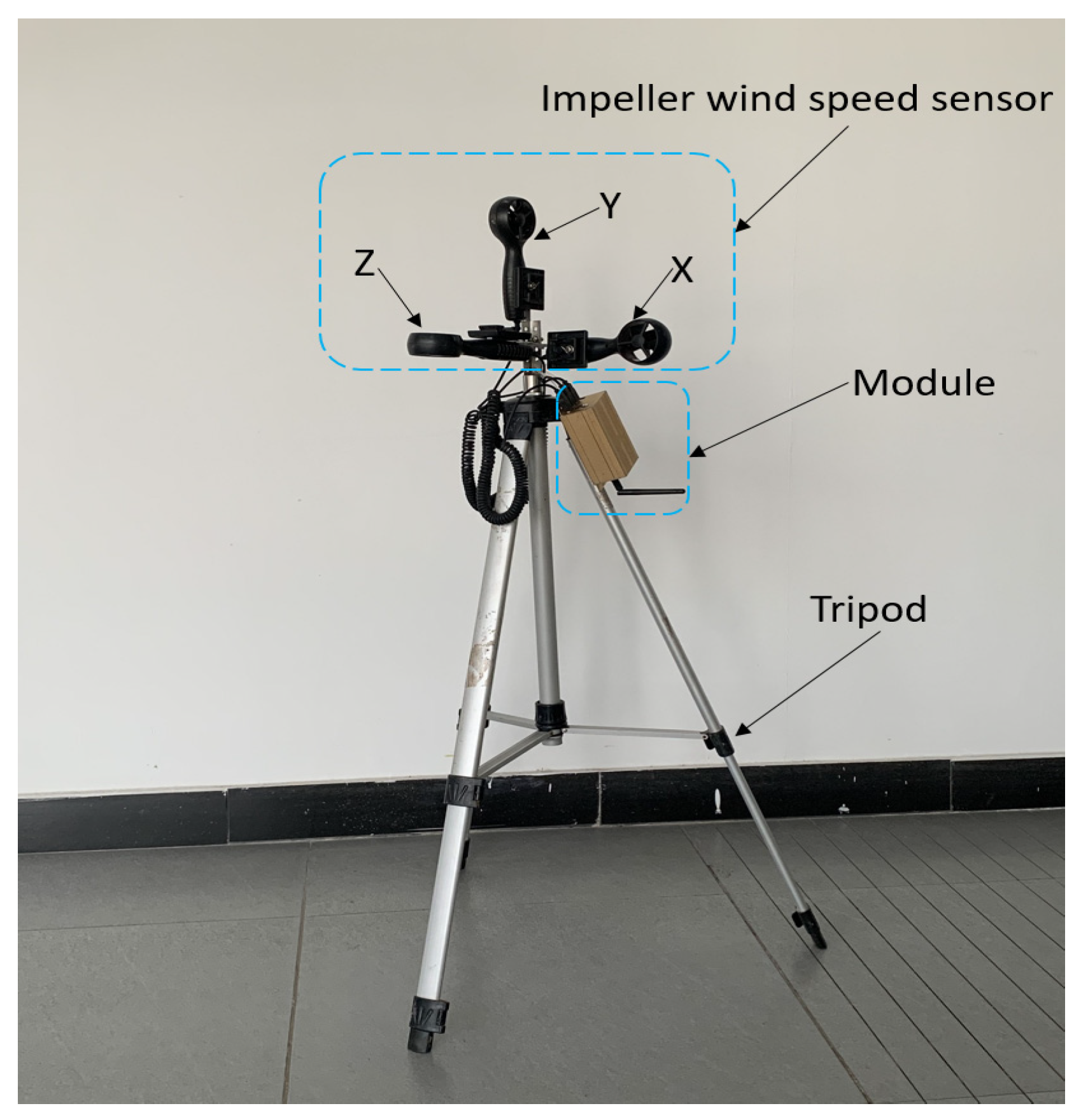
2.1. Materials and Equipment
2.2. Experiment Design
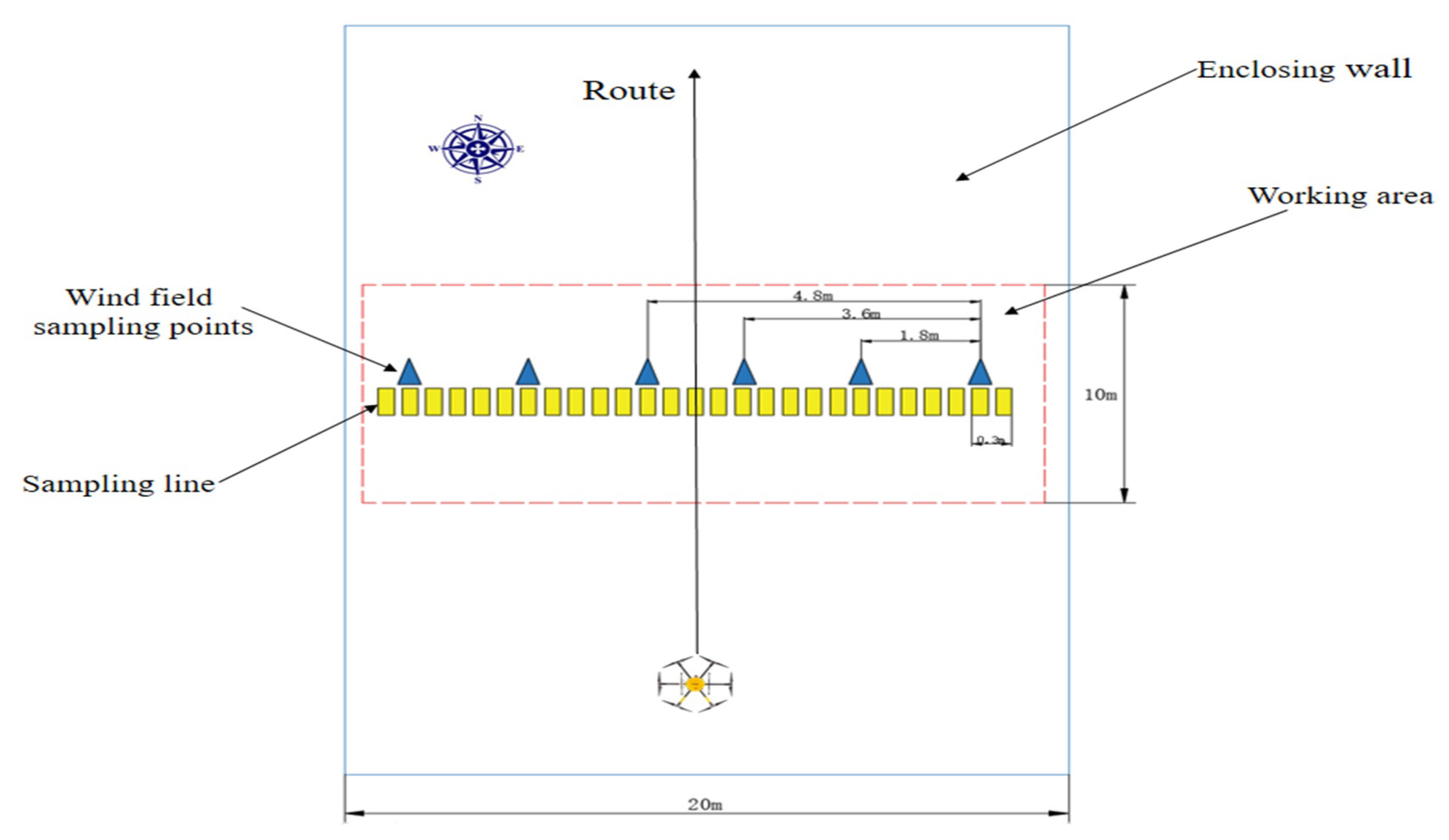
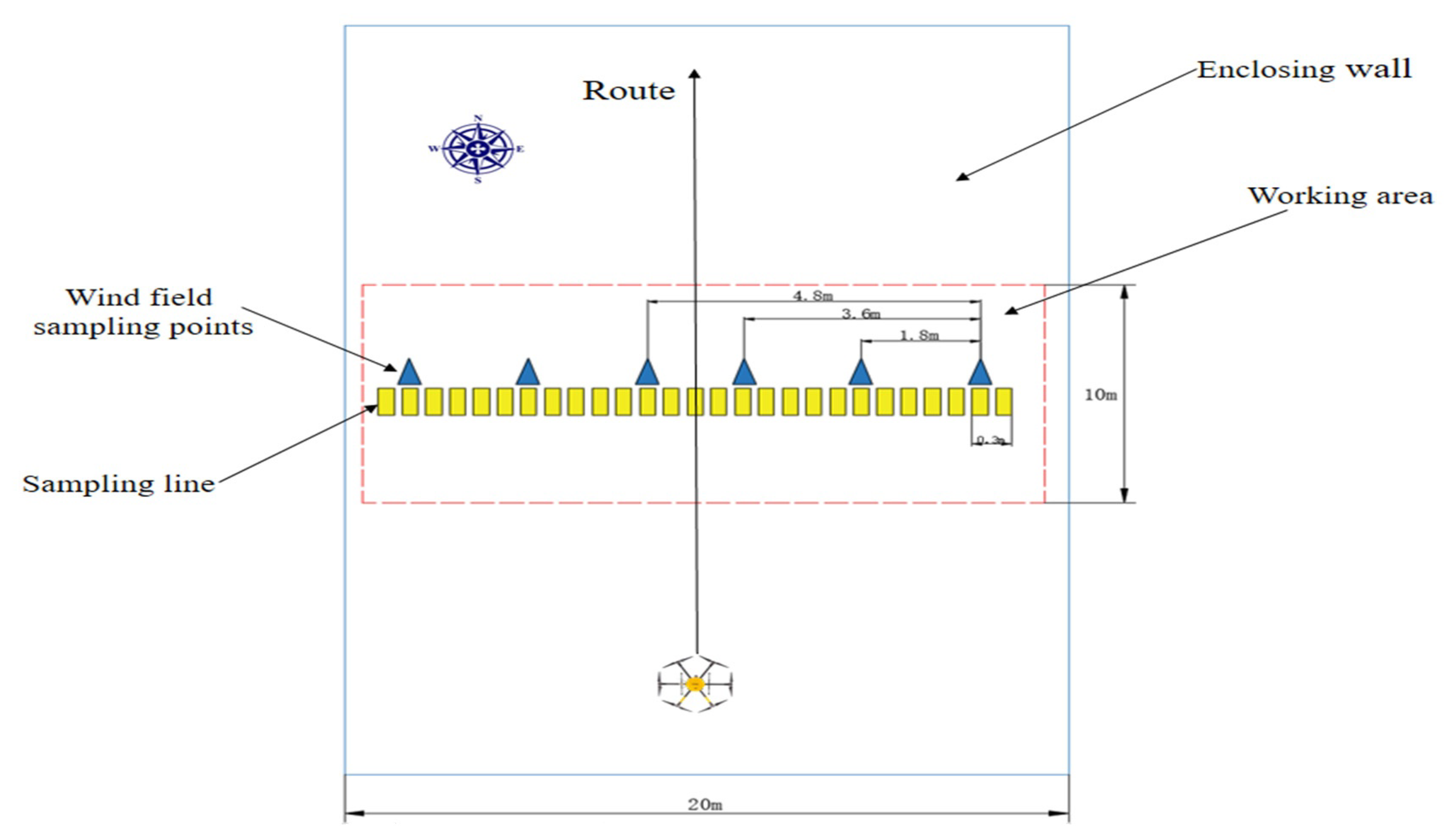
2.2.1. Test Site
2.2.2. Sampling Point Layout
2.2.3. Test Plan Design
2.3. Data Processing
3. Results and Discussion
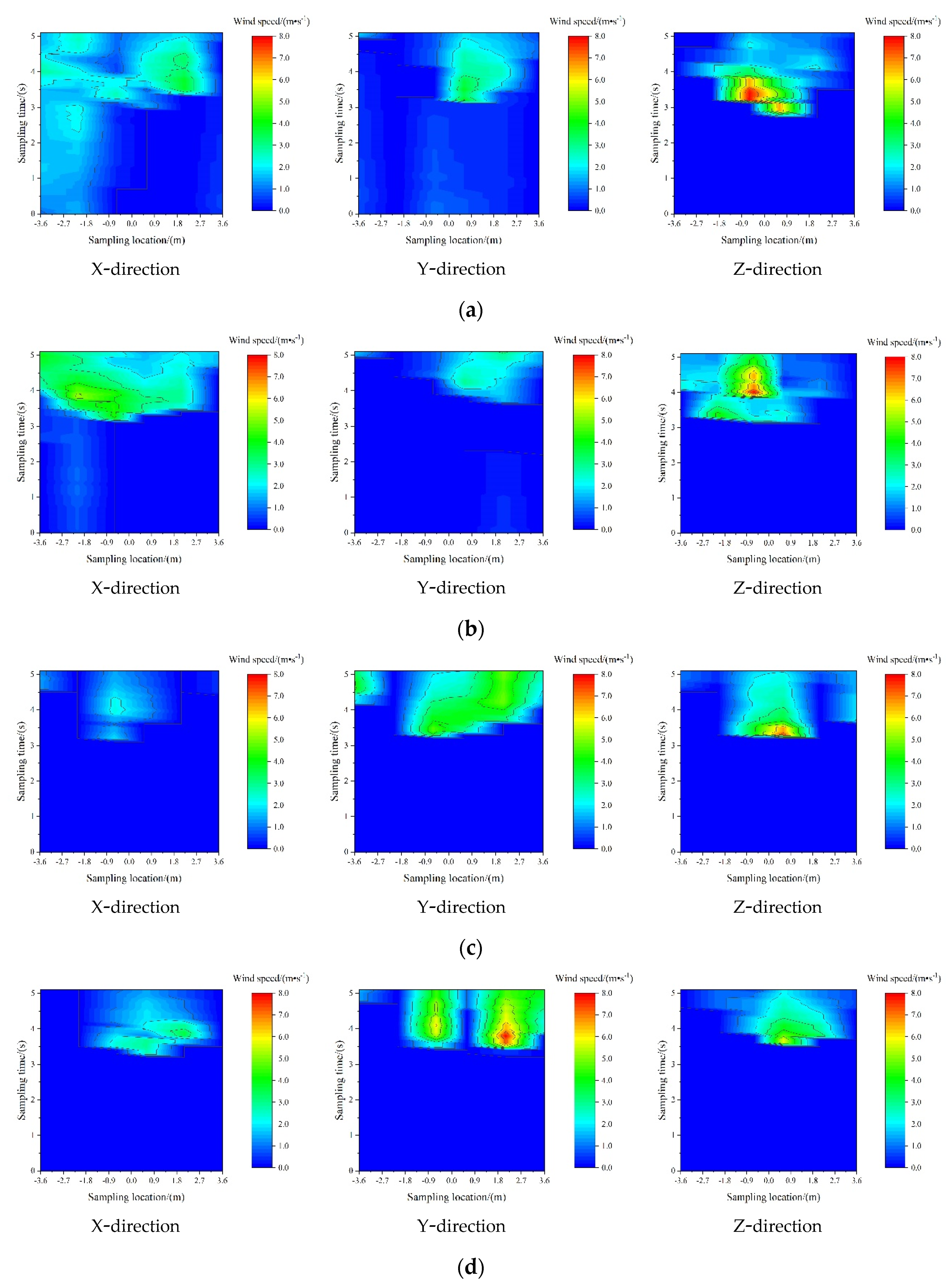
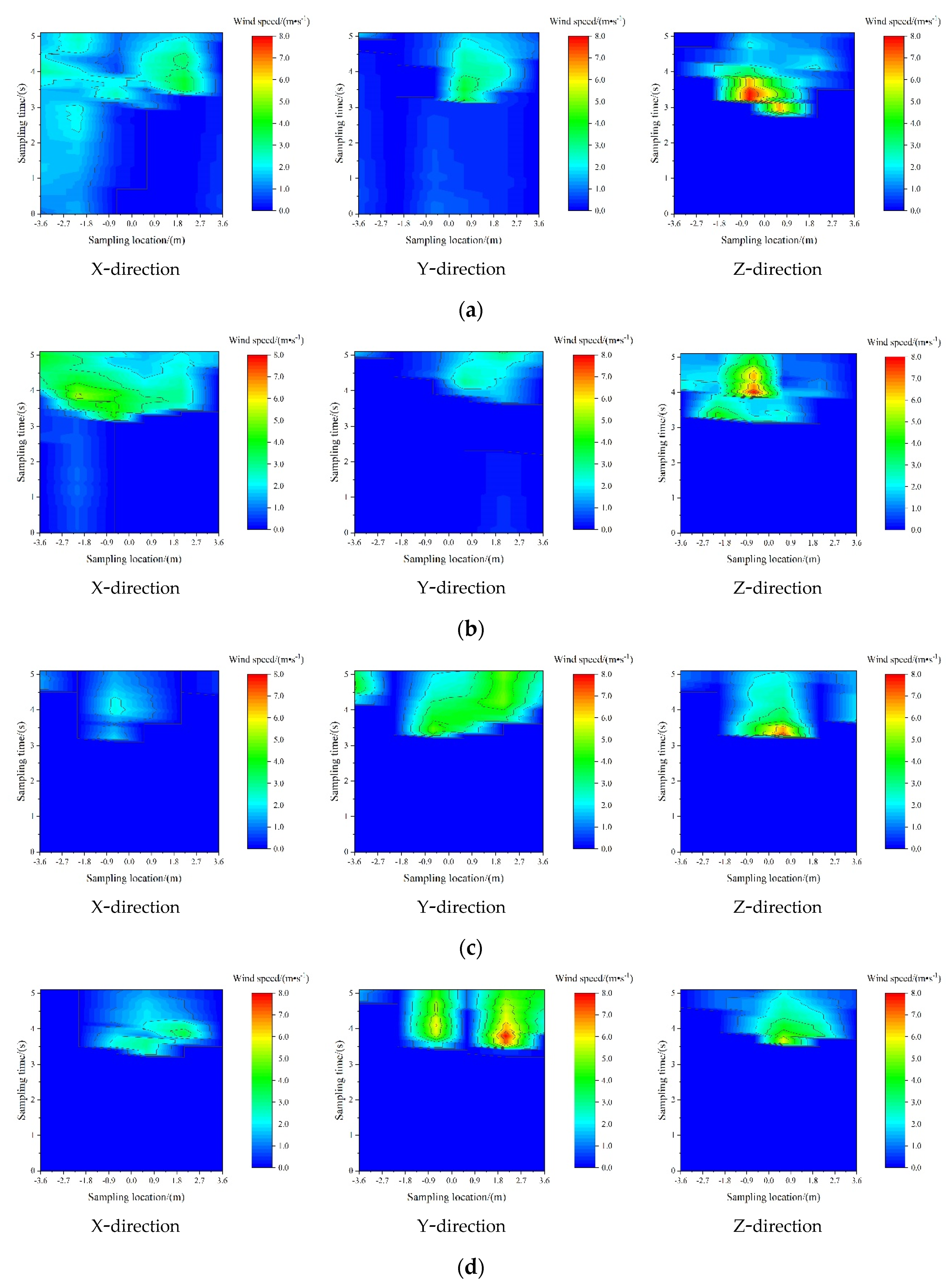
3.1. Downwash Wind Field Distribution
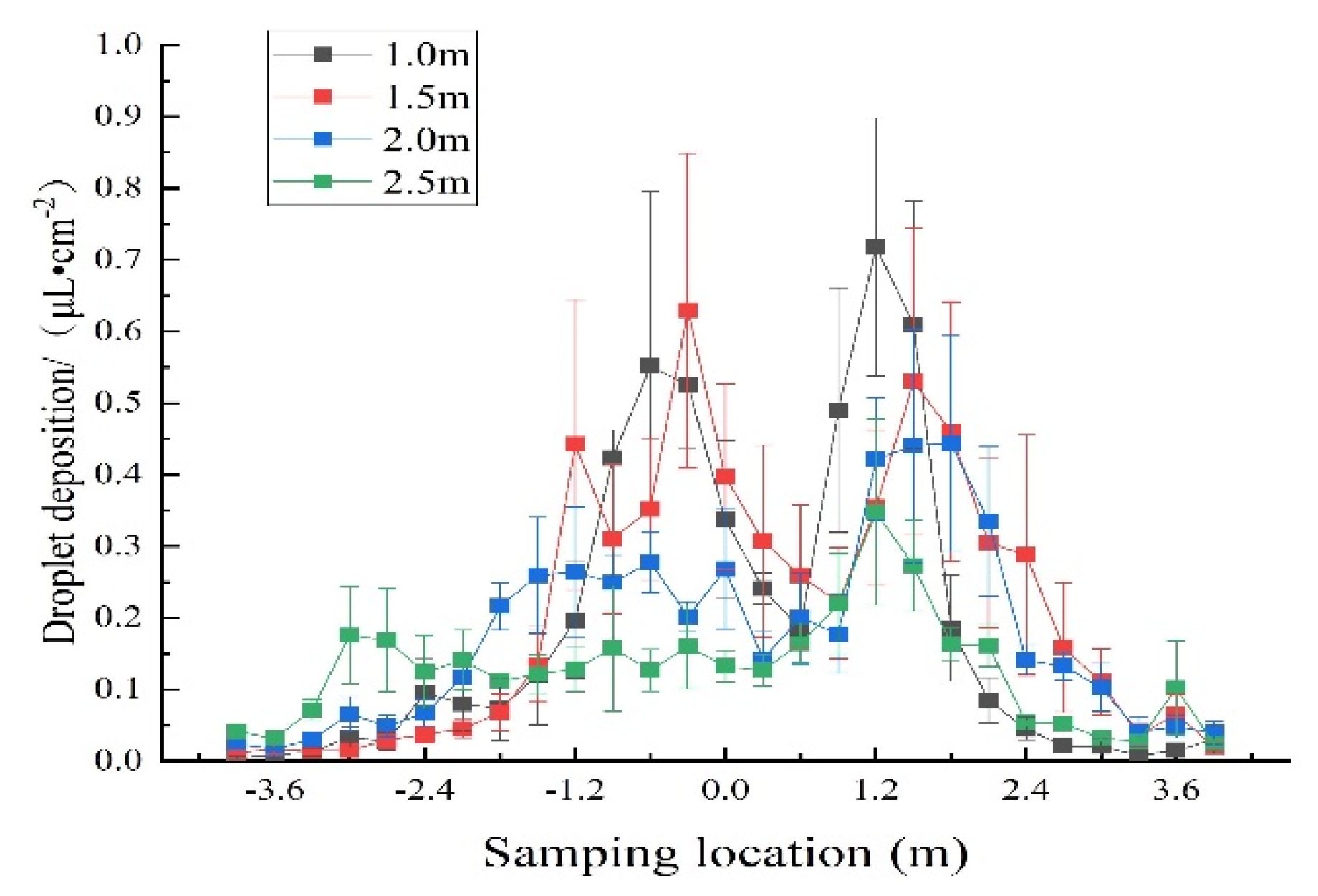
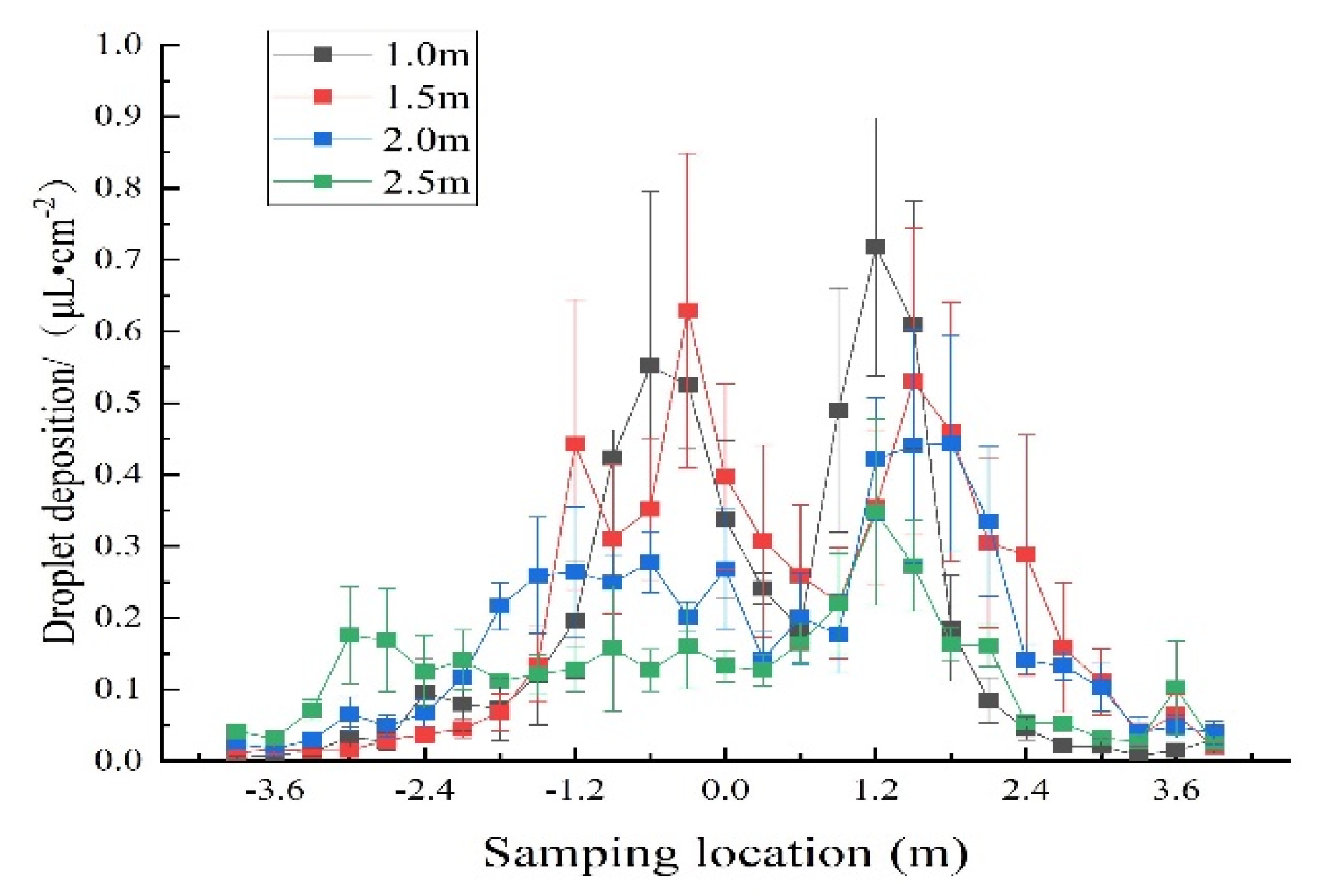
3.2. Droplet Deposition Distribution Characteristics
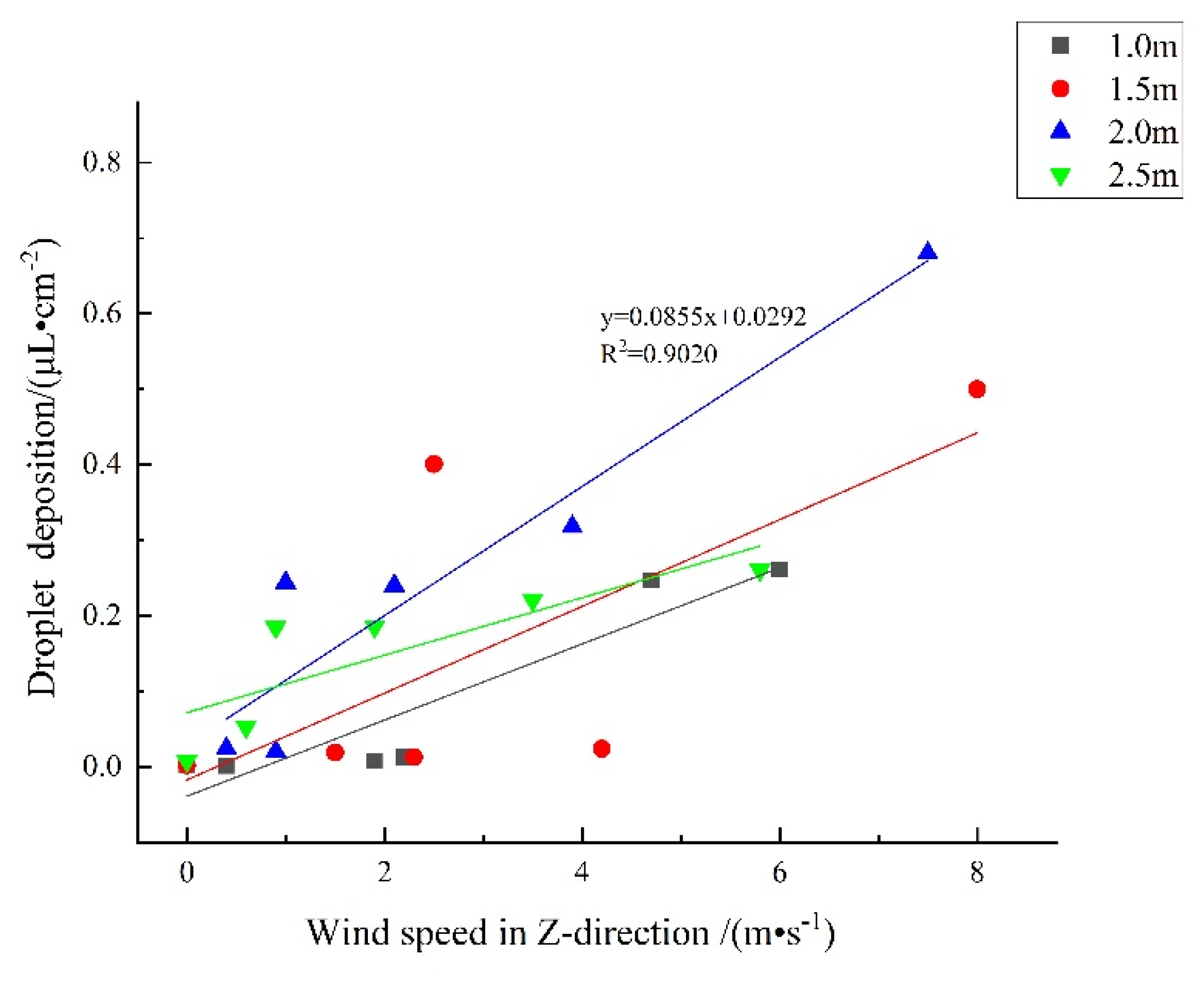
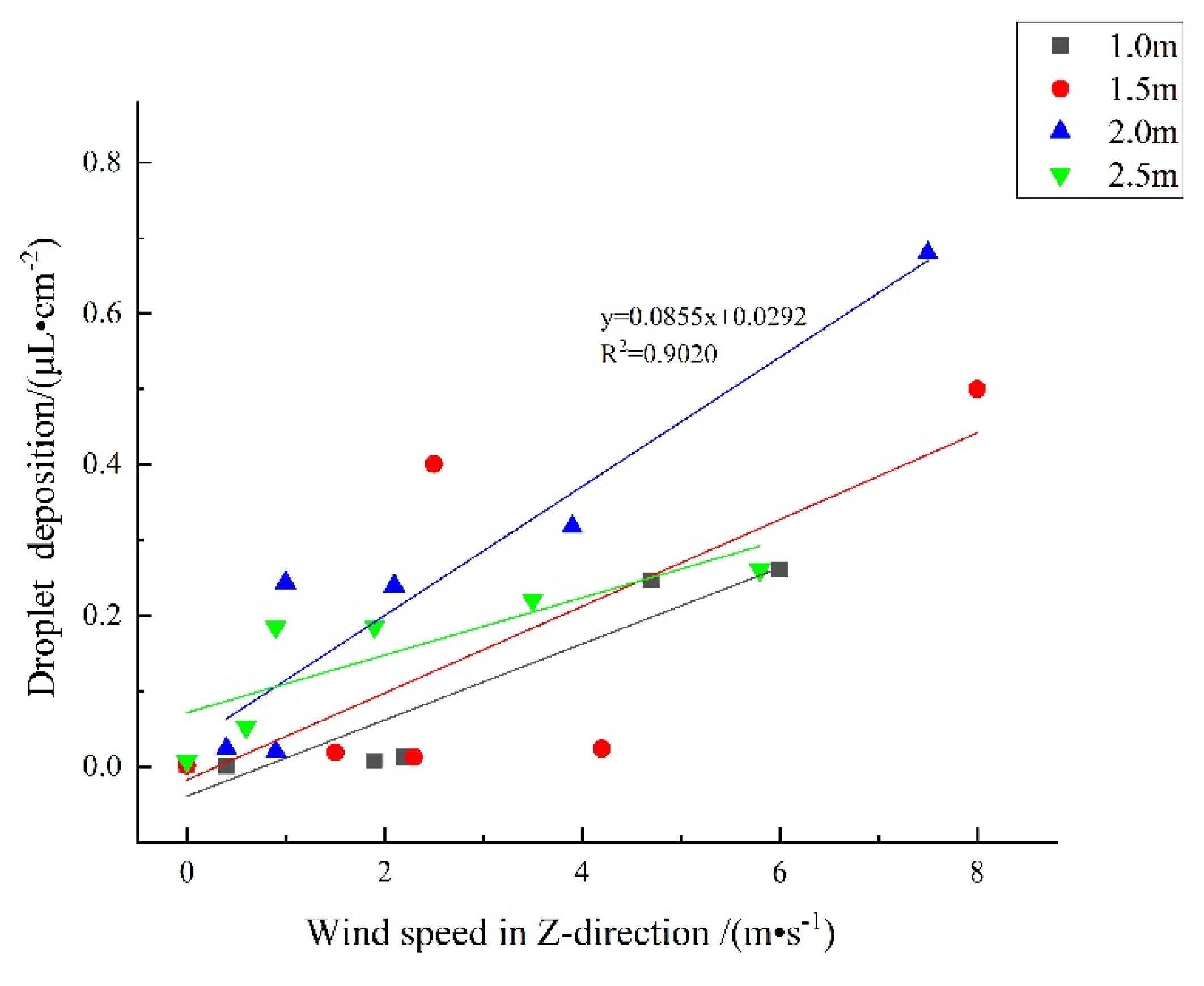
3.3. Analysis and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lan, Y.; Chen, S.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Wu, K. Development direction of crop pest control science and technology in China. J. Agric. 2018, 8, 35–38. [Google Scholar]
- Lan, Y.; Chen, S.; Deng, J.; Zhou, Z.; Ouyang, F. Development situation and problem analysis of plant protection unmanned aerial vehicle in China. Int. J. Agric. Biol. Eng. 2019, 10, 18–30. [Google Scholar]
- Zhou, Z.; Zang, Y.; Luo, X.; Lan, Y.; Xue, X. Technology innovation development strategy on agricultural. aviation industry for plant protection in China. Trans. Chin. Soc. Agric. Mach. 2013, 29, 1–10. (In Chinese) [Google Scholar]
- Wang, X. Research on Drift and Anti Drift Method of Pesticide Droplets; China Agricultural University: Beijing, China, 2017. [Google Scholar]
- Zhang, D.; Lan, Y.; Chen, L.; Wang, X.; Liang, D. Current status and future trends of agricultural aerial spraying technology in China. Trans. Chin. Soc. Agric. Mach. 2014, 45, 53–59. (In Chinese) [Google Scholar]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Zhou, Z.; Jiang, R.; Luo, X. Application analysis of liquid-level monitoring technology to plant protection UAV. Trans. Chin. Soc. Agric. Mach. 2017, 48, 47–55. (In Chinese) [Google Scholar]
- Yang, X.; Yan, H.; Xu, S.; Liu, Z. Current situation and development trend of equipment for crop protection. Trans. Chin. Soc. Agric. Mach. 2002, 33, 129–131. (In Chinese) [Google Scholar]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Deng, X.; Cheng, S. Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef] [Green Version]
- Lan, Y.; Thomson, S.J.; Huang, Y.; Hoffmann, W.C.; Zhang, H. Current status and future directions of precision aerial application for site-specific crop management in the USA. Comput. Electron. Agric. 2010, 74, 34–38. [Google Scholar] [CrossRef] [Green Version]
- Qiu, B.; Wang, L.; Cai, D.; Wu, J.; Ding, G.; Guan, X. Effects of flight altitude and speed of unmanned helicopter on spray deposition uniform. Trans. Chin. Soc. Agric. Eng. 2013, 29, 25–32, (In Chinese with English abstract). [Google Scholar]
- Qin, W.; Xue, X.; Zhou, L.; Zhang, S.; Sun, Z.; Kong, W.; Wang, B. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies. Trans. Chin. Soc. Agric. Eng. 2014, 30, 50–56, (In Chinese with English abstract). [Google Scholar]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Jin, J.; Liu, A. Effect of spray parameters of small unmanned helicopter om distribution regularity of droplet deposition in hybrid rice canopy. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–46, (In Chinese with English abstract). [Google Scholar]
- Chen, S.; Lan, Y.; Bradley, K.; Li, J.Y.; Liu, A.; Mao, Y. Effect of wind field below rotor on distribution of aerial spraying droplet deposition by using multi-rotor UAV. Trans. Chin. Soc. Agric. Mach. 2017, 48, 105–113. (In Chinese) [Google Scholar]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Liu, A.; Mao, Y. Effect of wind field below rotor of unmanned helicopter on droplet deposition distribution of aerial spraying. Int. J. Agric. Biol. Eng. 2017, 10, 67–77. [Google Scholar]
- Zhang, S.; Xue, X.; Qin, W.; Sun, Z.; Ding, S.; Zhou, L. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 87–93, (In Chinese with English abstract). [Google Scholar]
- Yang, F.; Xue, X.; Zhang, L.; Sun, Z. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar]
- Yang, F.; Xue, X.; Cai, C.; Sun, Z.; Zhou, Q. Numerical simulation and analysis on spray drift movement of multirotor plant protection unmanned aerial vehicle. Energies 2018, 11, 2399. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhou, Z.; Hu, L.; Zang, Y.; Xu, S.; Liu, A.; Luo, X.; Zhang, T. Optimization of Operation Parameters for Supplementary Pollination in Hybrid Rice Breeding Using Round Multi-Axis Multi-Rotor Electric Unmanned Helicopter. Trans. Chin. Soc. Agric. Eng. 2014, 30, 1–9. [Google Scholar]
- Li, J.; Zhou, Z.; Lan, Y.; Hu, L.; Zang, Y.; Liu, A.; Luo, X.; Zhang, T. Distribution of Canopy Wind Field Produced by Rotor Unmanned Aerial Vehicle Pollination Operation. Trans. Chin. Soc. Agric. Eng. 2015, 31, 77–86. [Google Scholar]
- Li, J.; Lan, Y.; Wang, J.; Chen, S.; Huang, C.; Liu, Q.; Liang, Q. Distribution Law of Rice Pollen in the Wind Field of Small UAV. Int. J. Agric. Biol. Eng. 2017, 10, 32–40. [Google Scholar]
- Hu, L.; Zhou, Z.; Luo, X. Design and Test of Wireless Sensor Network Measurement System for Wind Field of Unmanned Helicopter. Trans. Chin. Soc. Agric. Mach. 2014, 45, 221–226. [Google Scholar]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Li, J.; Xu, X.; Wang, Z.; Peng, B. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV. Trans. Chin. Soc. Agric. Mach. 2017, 33, 82–90. (In Chinese) [Google Scholar]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Liu, A.; Xu, X. Comparison of the pesticide effects of aerial and artificial spray applications for rice. J. South China Agric. Univ. 2017, 38, 103–109. (In Chinese) [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameter | Norms and Numerical Value |
|---|---|
| Type | DJI T16 |
| Unfold fuselage size/mm × mm × mm | 2520 × 2212 × 720 |
| Maximum load/L | 16 |
| Total spray flow/(L·min−1) | 0~4.8 |
| Maximum operating flight speed/(m·s−1) | 7 |
| Effective spray width/m | 4~7.5 |
| Flight Height/m | Peak Wind Speed in X-Direction/m·s−1 | Peak Wind Speed in Y-Direction/m·s−1 | Peak Wind Speed in Z-Direction/m·s−1 | Average Deposition/(μL·cm−2) | CV of Deposition/% |
|---|---|---|---|---|---|
| 1.0 | 3.8 ± 0.4 | 4.6 ± 1.1 | 8.1 ± 0.7 | 0.482 ± 0.167 | 58.3 ± 5.5 |
| 1.5 | 3.2 ± 0.8 | 4.8 ± 0.7 | 8.0 ± 0.4 | 0.436 ± 0.049 | 62.0 ± 3.4 |
| 2.0 | 2.6 ± 0.9 | 4.9 ± 0.6 | 6.6 ± 0.9 | 0.295 ± 0.077 | 48.6 ± 6.0 |
| 2.5 | 2.3 ± 1.1 | 7.7 ± 0.4 | 5.8 ± 0.6 | 0.189 ± 0.072 | 42.5 ± 4.4 |
| Index Item | Factor | Regression Coefficients | Standard Error | p | Significance |
|---|---|---|---|---|---|
| Deposition | Wind speed in Y-direction | −0.06 | 0.026 | 0.041 | * |
| Wind speed in Z-direction | 0.117 | 0.018 | 0.001 | ** | |
| Deposition uniformity | Wind speed in Z-direction | 0.058 | 0.042 | 0.036 | * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lan, Y.; Qian, S.; Chen, S.; Zhao, Y.; Deng, X.; Wang, G.; Zang, Y.; Wang, J.; Qiu, X. Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights. Agronomy 2021, 11, 2399. https://doi.org/10.3390/agronomy11122399
Lan Y, Qian S, Chen S, Zhao Y, Deng X, Wang G, Zang Y, Wang J, Qiu X. Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights. Agronomy. 2021; 11(12):2399. https://doi.org/10.3390/agronomy11122399
Chicago/Turabian StyleLan, Yubin, Shicheng Qian, Shengde Chen, Yingjie Zhao, Xiaoling Deng, Guobin Wang, Yu Zang, Juan Wang, and Xingyan Qiu. 2021. "Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights" Agronomy 11, no. 12: 2399. https://doi.org/10.3390/agronomy11122399
APA StyleLan, Y., Qian, S., Chen, S., Zhao, Y., Deng, X., Wang, G., Zang, Y., Wang, J., & Qiu, X. (2021). Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights. Agronomy, 11(12), 2399. https://doi.org/10.3390/agronomy11122399