
Flexible Piezoresistive Sensor Based on CNT/PVA Composite with Wide Linear Detection Range for Human Motion Monitoring

 ,
,  , , and
, , and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Raw Materials
2.2. Preparation of Flexible PDMS Substrates
2.3. Preparation of CNT Dispersions, PVA Solution, and CNT/PVA Solution
2.4. Fabrication of Interdigital Electrodes
2.5. Fabrication of Sensing Films and Sensors
2.6. Characterization and Testing Equipment
3. Results and Discussion
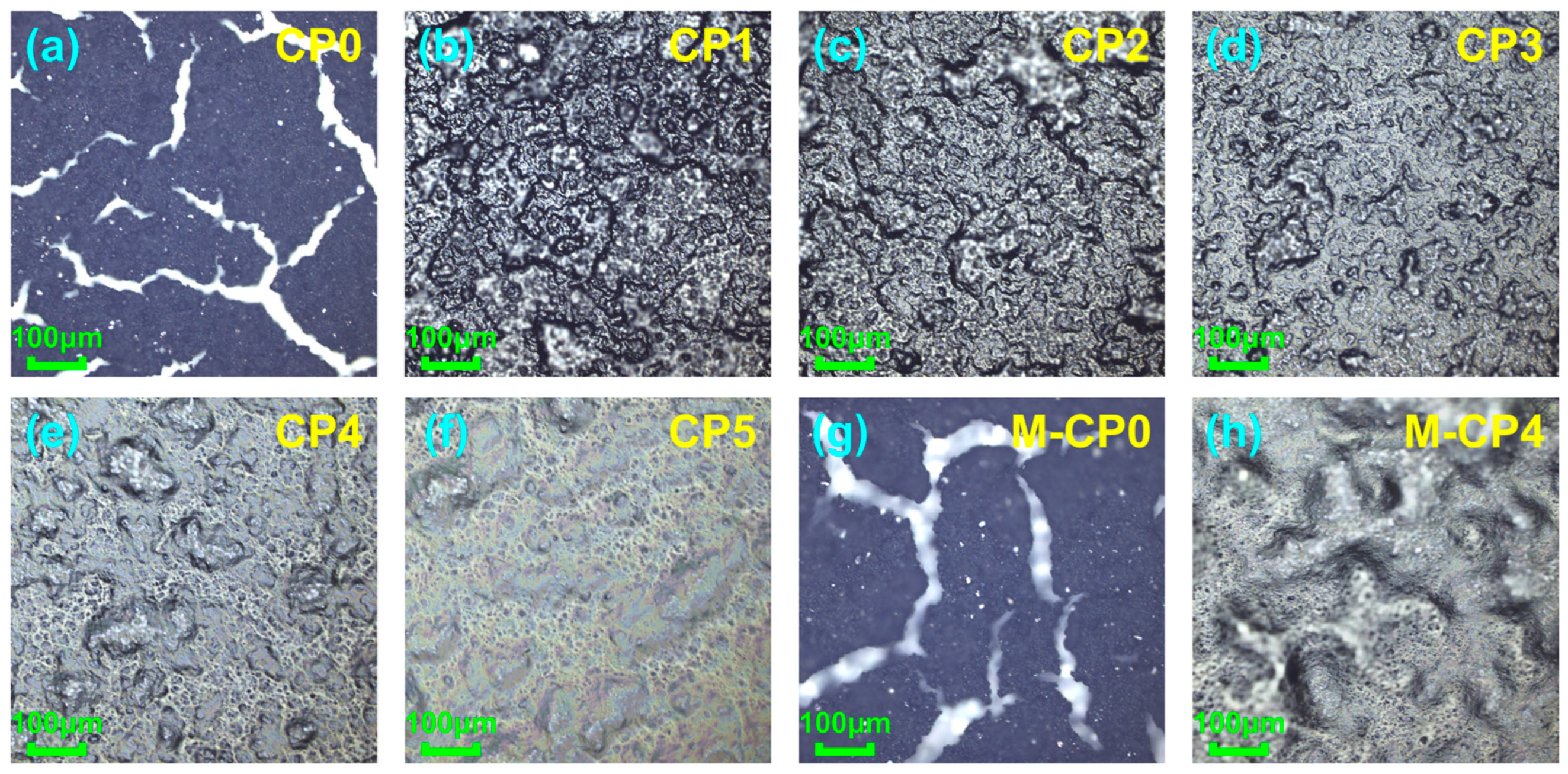
3.1. Characterization of CNT/PVA@PDMS Films
3.2. Piezoresistive Characteristics and Sensing Mechanisms of CP1–CP5
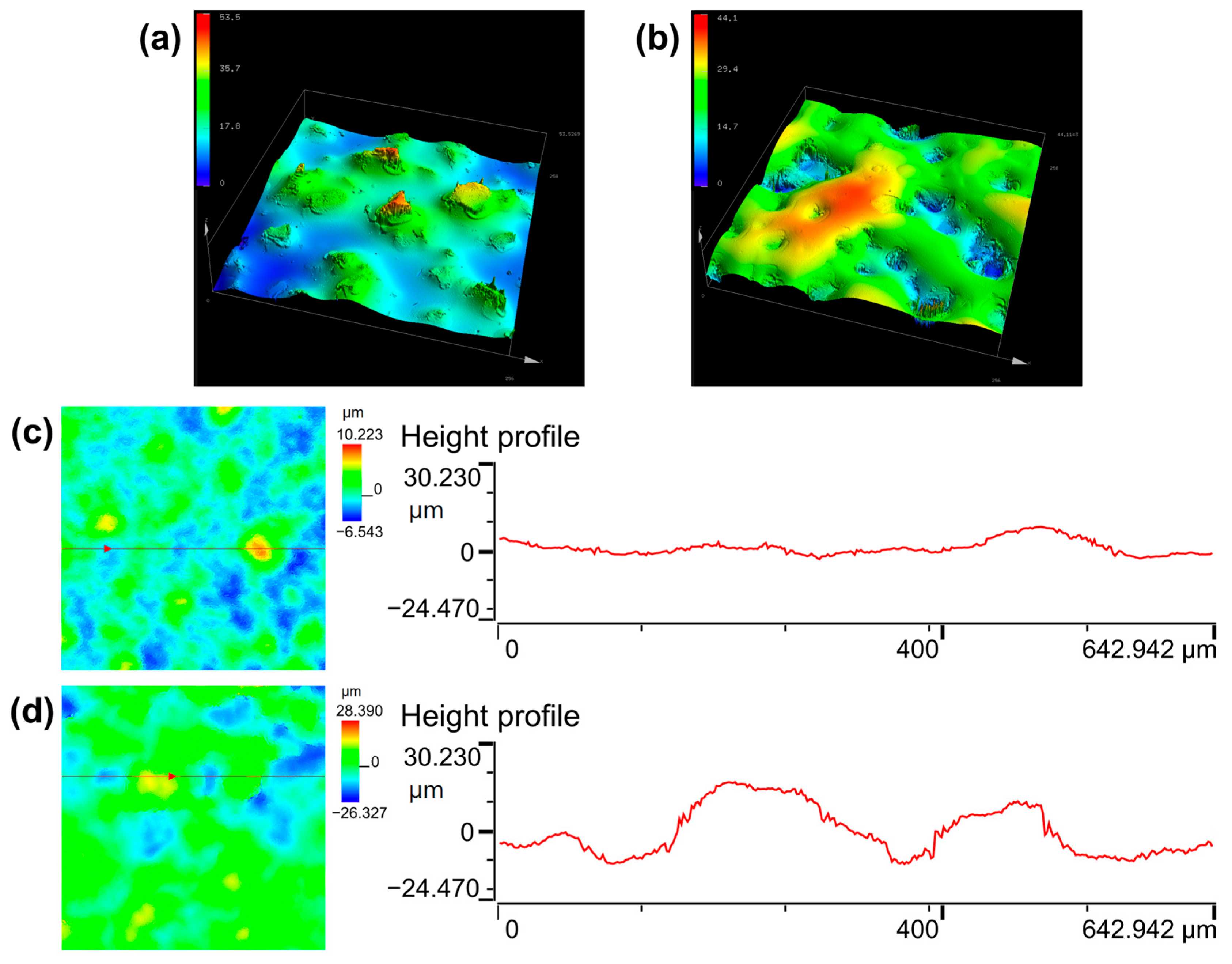
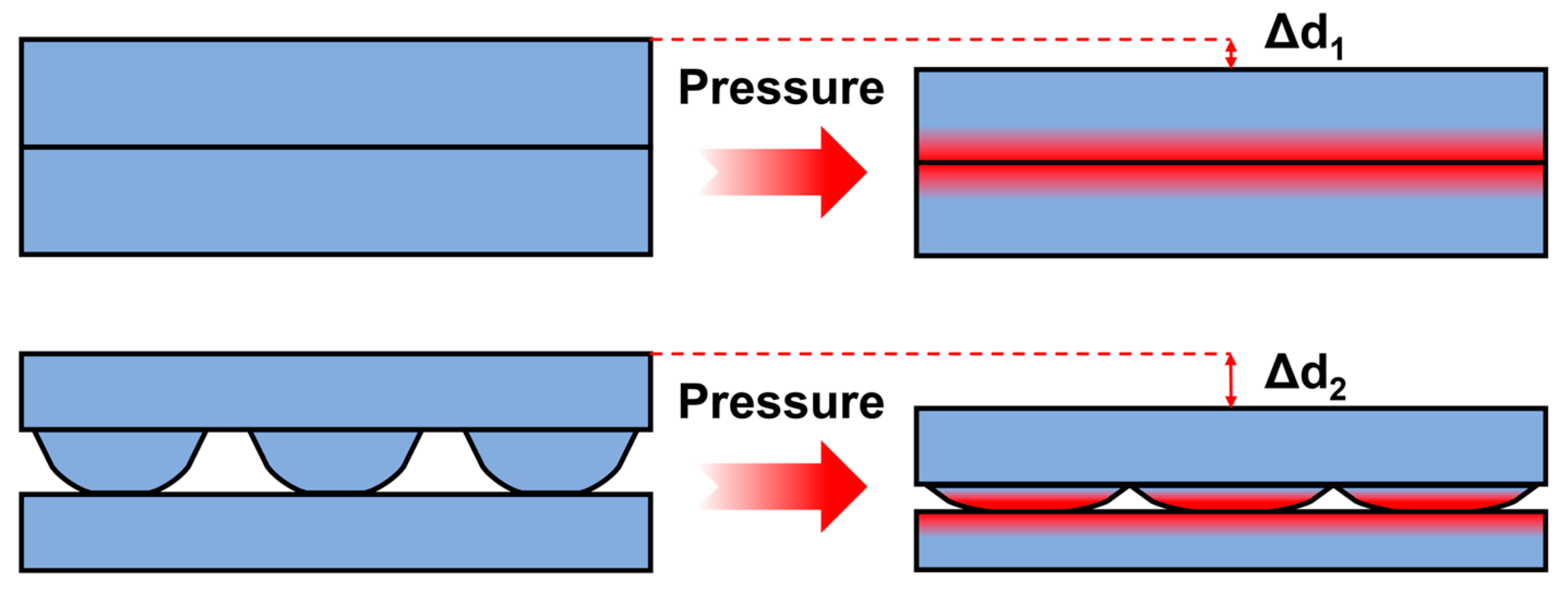
3.3. Characterization and Effect of Microstructures
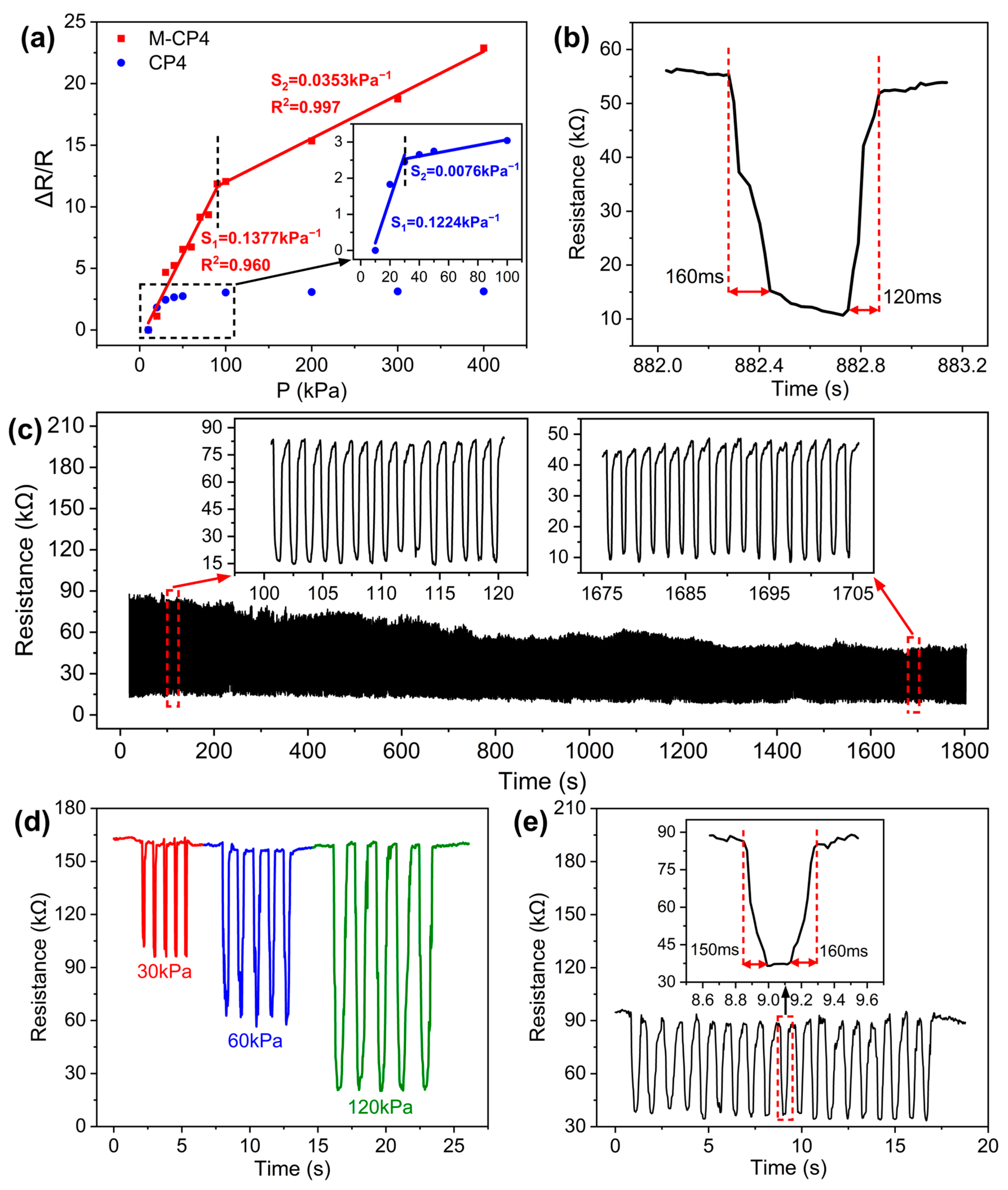
3.4. Sensing Performance of M-CP4
- (1)
- Pressure Application and Data Acquisition: A universal testing machine was first used to apply gradually increasing pressure to the sensor, while a digital multimeter monitored the corresponding resistance changes. At each pressure level, a segment of stable resistance data was recorded;
- (2)
- Data Processing: The average value of each stable resistance segment was then calculated and defined as the resistance value corresponding to that pressure;
- (3)
- Sensitivity Calculation: According to Formula (5) listed before, the relative change rate of resistance reciprocal (∆R/R) was computed for each pressure point. These values were plotted to generate a ΔR/R-versus-pressure (P) curve, and the sensitivity was ultimately determined as the slope of the linear fit to this curve.
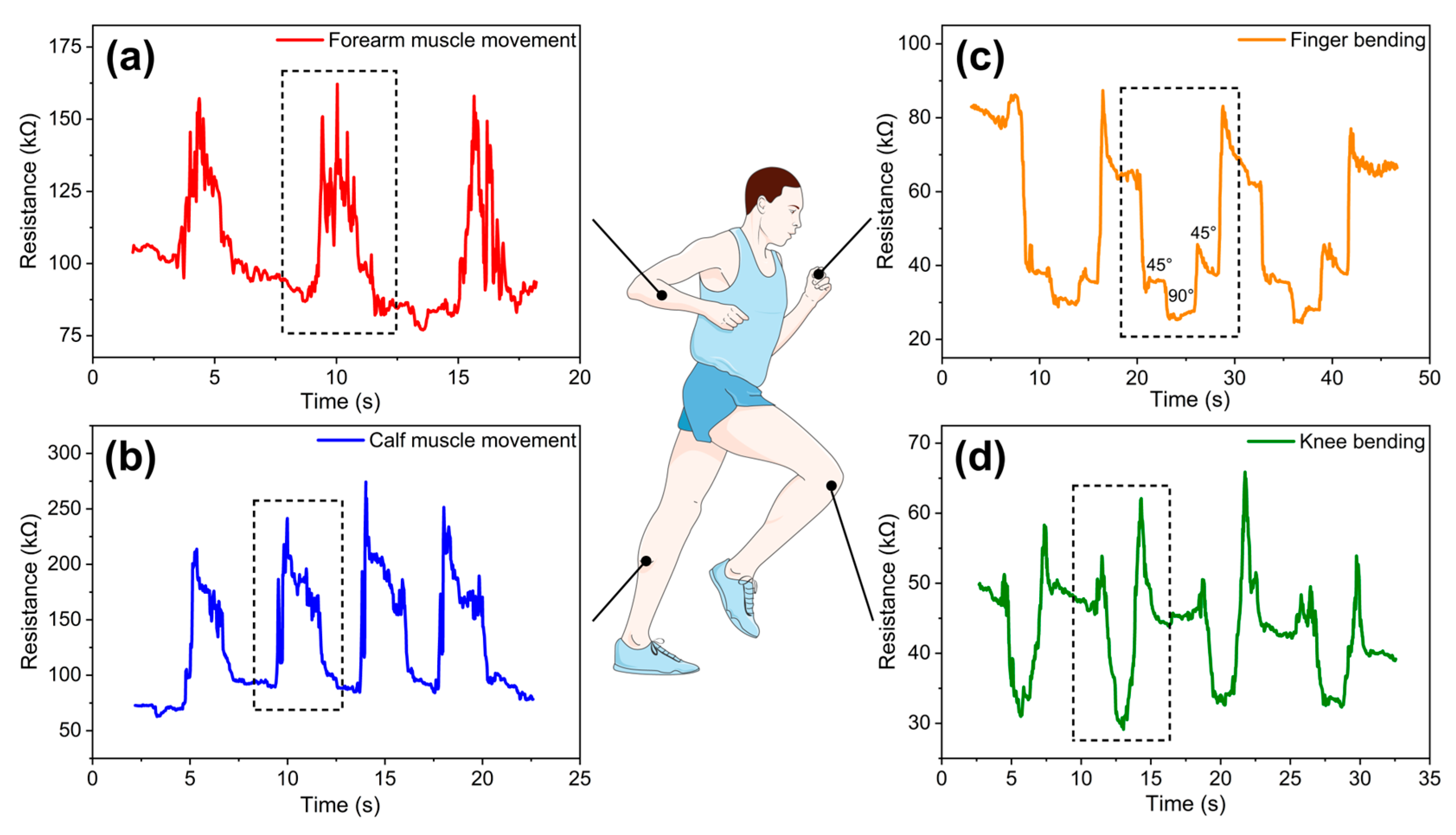
3.5. Practical Application of M-CP4 in Human Motion Detection
4. Conclusions
- (1)
- We systematically investigated the effect of CNT/PVA ratio on the sensor’s piezoresistive characteristics, finding that the sensing film exhibits optimal piezoresistive properties when the weight percentage of CNTs reaches 11.24 wt%;
- (2)
- We proposed a piezoresistive model for the composite conductive material and explained the working mechanism related to CNT content, thereby further confirming that conductive networks in the percolation zone exhibit the best sensing performance;
- (3)
- By further combining with PDMS substrates featuring hill-like microstructures, we achieved a dual improvement in both sensor sensitivity and detection range. The optimized sensor demonstrates a sensitivity of 0.1377 kPa−1 in the 0–90 kPa range, a wide linear working range exceeding 400 kPa, along with short response time (160 ms), good cycling stability (over 1200 pressure cycles), and flexibility stability (over 2000 folding cycles);
- (4)
- The sensor can successfully detect various human activities, including joint bending (finger and knee flexion) and muscle movement (arm and leg muscle contractions).
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Yao, R.; Huang, H.; Zhong, J.; Huang, Y.; Wu, R.; Luo, D.; Liu, X.; Ning, H.; Peng, J. Highly sensitive flexible graphene pressure sensor based on indocalamus leaves’ microstructure. Surf. Interfaces 2024, 48, 104304. [Google Scholar] [CrossRef]
- Wang, L.; Ning, H.; Chen, S.; Huang, Y.; Chen, S.; Wang, L.; Liu, Y.; Liu, H.; Qiu, T.; Yao, R.; et al. MXene/rGO piezoresistive sensor based on Longan leaves’ hierarchical microstructure for human-motion detection. Appl. Mater. Today 2024, 41, 102474. [Google Scholar] [CrossRef]
- Guo, W.; Tang, X.; Tang, Z.; Sun, Q. Recent Advances in Polymer Composites for Flexible Pressure Sensors. Polymers 2023, 15, 2176. [Google Scholar] [CrossRef]
- Lai, Q.; Sun, Q.; Tang, Z.; Tang, X.; Zhao, X. Conjugated Polymer-Based Nanocomposites for Pressure Sensors. Molecules 2023, 28, 1627. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Yuan, J.; Li, Q.; Ding, L.; Shi, C.; Wang, Q.; Niu, Y.; Xu, C. Carbon Black/Multi-Walled Carbon Nanotube-Based, Highly Sensitive, Flexible Pressure Sensor. ACS Omega 2022, 7, 44428–44437. [Google Scholar] [CrossRef]
- Huang, H.; Zhong, J.; Ye, Y.; Wu, R.; Luo, B.; Ning, H.; Qiu, T.; Luo, D.; Yao, R.; Peng, J. Research Progresses in Microstructure Designs of Flexible Pressure Sensors. Polymers 2022, 14, 3670. [Google Scholar] [CrossRef]
- Tang, R.; Lu, F.; Liu, L.; Yan, Y.; Du, Q.; Zhang, B.; Zhou, T.; Fu, H. Flexible pressure sensors with microstructures. Nano Sel. 2021, 2, 1874–1901. [Google Scholar] [CrossRef]
- Tan, Y.; Liu, X.; Tang, W.; Chen, J.; Zhu, Z.; Li, L.; Zhou, N.; Kang, X.; Xu, D.; Wang, L.; et al. Flexible Pressure Sensors Based on Bionic Microstructures: From Plants to Animals. Adv. Mater. Interfaces 2022, 9, 2101312. [Google Scholar] [CrossRef]
- Liu, M.; Hang, C.; Zhao, X.; Zhu, L.; Ma, R.; Wang, J.; Lu, H.; Zhang, D.W. Advance on flexible pressure sensors based on metal and carbonaceous nanomaterial. Nano Energy 2021, 87, 106181. [Google Scholar] [CrossRef]
- He, J.; Zhang, Y.; Zhou, R.; Meng, L.; Chen, T.; Mai, W.; Pan, C. Recent advances of wearable and flexible piezoresistivity pressure sensor devices and its future prospects. J. Mater. 2020, 6, 86–101. [Google Scholar] [CrossRef]
- Choong, C.L.; Shim, M.B.; Lee, B.S.; Jeon, S.; Ko, D.S.; Kang, T.H.; Bae, J.; Lee, S.H.; Byun, K.E.; Im, J.; et al. Highly Stretchable Resistive Pressure Sensors Using a Conductive Elastomeric Composite on a Micropyramid Array. Adv. Mater. 2014, 26, 3451–3458. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Liu, X.; Wang, Y.; Peng, L.; Jin, X.; Jiang, Z.; Guo, Z.; Chen, J.; Wang, W. Research on high sensitivity piezoresistive sensor based on structural design. Discov. Nano 2024, 19, 88. [Google Scholar] [CrossRef] [PubMed]
- Jian, M.; Wang, C.; Wang, Q.; Wang, H.; Xia, K.; Yin, Z.; Zhang, M.; Liang, X.; Zhang, Y. Advanced carbon materials for flexible and wearable sensors. Sci. China Mater. 2017, 60, 1026–1062. [Google Scholar] [CrossRef]
- Shi, J.; Wang, L.; Dai, Z.; Zhao, L.; Du, M.; Li, H.; Fang, Y. Multiscale Hierarchical Design of a Flexible Piezoresistive Pressure Sensor with High Sensitivity and Wide Linearity Range. Small 2018, 14, 1800819. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, B.; Li, K.; Zhang, T.; Yang, X. A wide linearity range and high sensitivity flexible pressure sensor with hierarchical microstructures via laser marking. J. Mater. Chem. C 2020, 8, 3088–3096. [Google Scholar] [CrossRef]
- Qin, R.; Li, X.; Hu, M.; Shan, G.; Seeram, R.; Yin, M. Preparation of high-performance MXene/PVA-based flexible pressure sensors with adjustable sensitivity and sensing range. Sens. Actuators A Phys. 2022, 338, 113458. [Google Scholar] [CrossRef]
- Wang, H.; Li, S.; Lu, H.; Zhu, M.; Liang, H.; Wu, X.; Zhang, Y. Carbon-Based Flexible Devices for Comprehensive Health Monitoring. Small Methods 2023, 7, 2201340. [Google Scholar] [CrossRef]
- Wang, C.; Xia, K.; Wang, H.; Liang, X.; Yin, Z.; Zhang, Y. Advanced Carbon for Flexible and Wearable Electronics. Adv. Mater. 2019, 31, 1801072. [Google Scholar] [CrossRef]
- Wang, C.; Hou, X.; Cui, M.; Yu, J.; Fan, X.; Qian, J.; He, J.; Geng, W.; Mu, J.; Chou, X. An ultra-sensitive and wide measuring range pressure sensor with paper-based CNT film/interdigitated structure. Sci. China Mater. 2020, 63, 403–412. [Google Scholar] [CrossRef]
- Sam-Daliri, O.; Farahani, M.; Faller, L.; Zangl, H. Structural health monitoring of defective single lap adhesive joints using graphene nanoplatelets. J. Manuf. Process 2020, 55, 119–130. [Google Scholar] [CrossRef]
- Reddy, S.K.; Kumar, S.; Varadarajan, K.M.; Marpu, P.R.; Gupta, T.K.; Choosri, M. Strain and damage-sensing performance of biocompatible smart CNT/UHMWPE nanocomposites. Mater. Sci. Eng. C 2018, 92, 957–968. [Google Scholar] [CrossRef] [PubMed]
- Sam-Daliri, O.; Faller, L.; Farahani, M.; Roshanghias, A.; Araee, A.; Baniassadi, M.; Oberlercher, H.; Zangl, H. Impedance analysis for condition monitoring of single lap CNT-epoxy adhesive joint. Int. J. Adhes. Adhes. 2019, 88, 59–65. [Google Scholar] [CrossRef]
- Peng, S.; Yu, Y.; Wu, S.; Wang, C. Conductive Polymer Nanocomposites for Stretchable Electronics: Material Selection, Design, and Applications. ACS Appl. Mater. Interfaces 2021, 13, 43831–43854. [Google Scholar] [CrossRef]
- Qian, W.; Fu, H.; Sun, Y.; Wang, Z.; Wu, H.; Kou, Z.; Li, B.W.; He, D.; Nan, C.W. Scalable Assembly of High-Quality Graphene Films via Electrostatic-Repulsion Aligning. Adv. Mater. 2022, 34, 2206101. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, L.J.; Zhang, H.M.; Zhao, Z.X.; Dong, S.L.; Wei, S.; Zhao, J.; Wang, Z.L.; Guo, B.; Hu, P.A. Highly sensitive flexible three-axis tactile sensors based on the interface contact resistance of microstructured graphene. Nanoscale 2018, 10, 7387–7395. [Google Scholar] [CrossRef]
- Zhao, H.; Jian, Z.; Zhang, J.; Du, Y.; Tang, Z.; Jiang, H.; Chen, R. Controllable preparation of carbon nanofiber membranes for enhanced flexibility and permeability. Carbon 2024, 229, 119496. [Google Scholar] [CrossRef]
- Gao, Y.; Xiao, T.; Li, Q.; Chen, Y.; Qiu, X.; Liu, J.; Bian, Y.; Xuan, F. Flexible microstructured pressure sensors: Design, fabrication and applications. Nanotechnology 2022, 33, 322002. [Google Scholar] [CrossRef]
- Huang, Y.; Fan, X.; Chen, S.C.; Zhao, N. Emerging Technologies of Flexible Pressure Sensors: Materials, Modeling, Devices, and Manufacturing. Adv. Funct. Mater. 2019, 29, 1808509. [Google Scholar] [CrossRef]
- Chen, H.; Zhuo, F.; Zhou, J.; Liu, Y.; Zhang, J.; Dong, S.; Liu, X.; Elmarakbi, A.; Duan, H.; Fu, Y. Advances in graphene-based flexible and wearable strain sensors. Chem. Eng. J. 2023, 464, 142576. [Google Scholar] [CrossRef]
- Kanoun, O.; Bouhamed, A.; Ramalingame, R.; Bautista-Quijano, J.R.; Rajendran, D.; Al-Hamry, A. Review on Conductive Polymer/CNTs Nanocomposites Based Flexible and Stretchable Strain and Pressure Sensors. Sensors 2021, 21, 341. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Shen, T.; Zhang, M.; Yin, R.; Zheng, Y.; Liu, H.; Sun, H.; Liu, C.; Shen, C. Advancing the pressure sensing performance of conductive CNT/PDMS composite film by constructing a hierarchical-structured surface. Nano Mater. Sci. 2023, 5, 343–350. [Google Scholar] [CrossRef]
- Xiao, Y.; Hu, C.; Yang, L.; Wu, J.; Li, J. Preparation of graphene/polydimethylsiloxane flexible resistive pressure sensors based on direct ink writing 3D printing. Sens. Actuators A Phys. 2025, 382, 116148. [Google Scholar] [CrossRef]
- Xu, C.; Lu, H.; Liu, Z.; Luo, N.; Wei, A. Flexible piezoresistive sensors based on porous PDMS/CB composite materials prepared by the solvothermal method. J. Mater. Sci. Mater. Electron. 2023, 34, 906. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.Y.; Ko, H. Giant Tunneling Piezoresistance of Composite Elastomers with Interlocked Microdome Arrays for Ultrasensitive and Multimodal Electronic Skins. ACS Nano 2014, 8, 4689–4697. [Google Scholar] [CrossRef]
- Sahoo, N.G.; Rana, S.; Cho, J.W.; Li, L.; Chan, S.H. Polymer nanocomposites based on functionalized carbon nanotubes. Prog. Polym. Sci. 2010, 35, 837–867. [Google Scholar] [CrossRef]
- Ma, P.; Siddiqui, N.A.; Marom, G.; Kim, J. Dispersion and functionalization of carbon nanotubes for polymer-based nanocomposites: A review. Compos. Part A Appl. Sci. Manuf. 2010, 41, 1345–1367. [Google Scholar] [CrossRef]
- Paiva, M.C.; Zhou, B.; Fernando, K.A.S.; Lin, Y.; Kennedy, J.M.; Sun, Y.P. Mechanical and morphological characterization of polymer–carbon nanocomposites from functionalized carbon nanotubes. Carbon 2004, 42, 2849–2854. [Google Scholar] [CrossRef]
- Chen, W.; Tao, X.; Xue, P.; Cheng, X. Enhanced mechanical properties and morphological characterizations of poly(vinyl alcohol)–carbon nanotube composite films. Appl. Surf. Sci. 2005, 252, 1404–1409. [Google Scholar] [CrossRef]
- Chen, Y.; Li, J.; Hong, Y.; He, W.; Tang, Y.; Zhou, G.; Xu, Z.; He, Y.; Nie, Z.; Zhang, J.; et al. Fabrication and characterization of nano-ZnO/CNTs/PDMS flexible pressure sensor. J. Mater. Sci. Mater. Electron. 2023, 34, 1600. [Google Scholar] [CrossRef]
- Kong, M.; Yang, M.; Li, R.; Long, Y.; Zhang, J.; Huang, X.; Cui, X.; Zhang, Y.; Said, Z.; Li, C. Graphene-based flexible wearable sensors: Mechanisms, challenges, and future directions. Int. J. Adv. Manuf. Technol. 2024, 131, 3205–3237. [Google Scholar] [CrossRef]
- Qin, R.; Nong, J.; Wang, K.; Liu, Y.; Zhou, S.; Hu, M.; Zhao, H.; Shan, G. Recent Advances in Flexible Pressure Sensors Based on MXene Materials. Adv. Mater. 2024, 36, 2312761. [Google Scholar] [CrossRef] [PubMed]
- Mampallil, D.; Eral, H.B. A review on suppression and utilization of the coffee-ring effect. Adv. Colloid Interface Sci. 2018, 252, 38–54. [Google Scholar] [CrossRef]
- Larson, R.G. Transport and deposition patterns in drying sessile droplets. Aiche. J. 2014, 60, 1538–1571. [Google Scholar] [CrossRef]
- Li, F.; Wang, H.; Nan, S.; Yang, Y.; Wang, Z.; Zhu, R.; Zhang, T.; Zhang, J. Flexible pressure sensors tuned by interface structure design–Numerical and experimental study. Appl. Surf. Sci. 2023, 638, 158021. [Google Scholar] [CrossRef]
- Tang, H.; Nie, P.; Wang, R.; Sun, J. Piezoresistive electronic skin based on diverse bionic microstructure. Sens. Actuators A Phys. 2021, 318, 112532. [Google Scholar] [CrossRef]
- Song, Y.; Chen, H.; Su, Z.; Chen, X.; Miao, L.; Zhang, J.; Cheng, X.; Zhang, H. Highly Compressible Integrated Supercapacitor–Piezoresistance-Sensor System with CNT–PDMS Sponge for Health Monitoring. Small 2017, 13, 1702091. [Google Scholar] [CrossRef]
- Qiao, Z.; Wei, A.; Wang, K.; Luo, N.; Liu, Z. Study of flexible piezoresistive sensors based on the hierarchical porous structure CNT /PDMS composite materials. J. Alloys Compd. 2022, 917, 165503. [Google Scholar] [CrossRef]
- Huang, C.; Yang, G.; Huang, P.; Hu, J.; Tang, Z.; Li, Y.; Fu, S. Flexible Pressure Sensor with an Excellent Linear Response in a Broad Detection Range for Human Motion Monitoring. ACS Appl. Mater. Inter. 2023, 15, 3476–3485. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, W.; Wen, Y.; Zhao, J.; Chen, C.; Chen, Z.; Zhang, X. Wearable, washable piezoresistive pressure sensor based on polyurethane sponge coated with composite CNT/CB/TPU. Mater. Today Phys. 2025, 52, 101681. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Number | CP0 | CP1 | CP2 | CP3 | CP4 | CP5 | M-CP0 | M-CP4 |
|---|---|---|---|---|---|---|---|---|
| Substrate | Flat substrate | Microstructured substrate | ||||||
| CNT dispersions/PVA solution volume ratio | 1:0 | 2:1 | 3:2 | 1:1 | 2:3 | 1:2 | 1:0 | 2:3 |
| CNT weight percentage (wt%) | 100.00 | 27.54 | 22.18 | 15.97 | 11.24 | 8.68 | 100.00 | 11.24 |
| Sensing Materials | Maximum Sensitivity | Working Range | Refs. |
|---|---|---|---|
| CNT-PDMS sponge | 0.033 kPa−1 | 55 kPa | [47] |
| CNT/PDMS | 0.59 kPa−1 | 260 kPa | [48] |
| nano-ZnO/CNT/PDMS | 0.18 kPa−1 | 80 kPa | [40] |
| CNT/CB/CIP/silicone | 0.136 kPa−1 | 220 kPa | [49] |
| CNT/CB/TPU@PU | 0.1 kPa−1 | 23.3 kPa | [50] |
| CNT/PVA | 0.1377 kPa−1 | 400 kPa | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Huang, Y.; Ning, H.; Liu, Y.; Tang, H.; Zhou, R.; Jin, S.; Zheng, J.; Yao, R.; Peng, J. Flexible Piezoresistive Sensor Based on CNT/PVA Composite with Wide Linear Detection Range for Human Motion Monitoring. Polymers 2025, 17, 1378. https://doi.org/10.3390/polym17101378
Chen L, Huang Y, Ning H, Liu Y, Tang H, Zhou R, Jin S, Zheng J, Yao R, Peng J. Flexible Piezoresistive Sensor Based on CNT/PVA Composite with Wide Linear Detection Range for Human Motion Monitoring. Polymers. 2025; 17(10):1378. https://doi.org/10.3390/polym17101378
Chicago/Turabian StyleChen, Lijun, Yucheng Huang, Honglong Ning, Yuxiang Liu, Huacheng Tang, Rui Zhou, Shaojie Jin, Jiahao Zheng, Rihui Yao, and Junbiao Peng. 2025. "Flexible Piezoresistive Sensor Based on CNT/PVA Composite with Wide Linear Detection Range for Human Motion Monitoring" Polymers 17, no. 10: 1378. https://doi.org/10.3390/polym17101378
APA StyleChen, L., Huang, Y., Ning, H., Liu, Y., Tang, H., Zhou, R., Jin, S., Zheng, J., Yao, R., & Peng, J. (2025). Flexible Piezoresistive Sensor Based on CNT/PVA Composite with Wide Linear Detection Range for Human Motion Monitoring. Polymers, 17(10), 1378. https://doi.org/10.3390/polym17101378